Предлагаемое изобретение относится к космической технике и может быть использовано для определения вектора состояния пассивного космического объекта (ПКО) на геостационарной орбите (ГСО) с активного космического объекта (АКО).
Известны способы наблюдения за космическими объектами искусственного происхождения, реализуемые системами наблюдения космического базирования. Одной из таких систем является американская система SBSS (Space Based Space Surveillance) [1, 2], выбранная в качестве аналога. Способ оперативного уточнения параметров орбитального движения заданных фрагментов космического мусора (КМ) с использованием принципа триангуляции реализуется при работе по целеуказаниям с Земли системой из нескольких космических аппаратов (КА)-наблюдателей, каждый из которых оснащен сборкой широкоугольных оптико-электронных камер, размещенных в двухстепенном кардановом подвесе. Данный способ предполагает, что наблюдение каждого фрагмента КМ будет производиться одновременно с двух КА-наблюдателей, что позволяет оценивать его положение в трехмерном пространстве с ошибкой, сопоставимой с ошибками определения собственного положения КА. Система развернута на солнечно-синхронной терминаторной орбите (ССТО), линия узлов которой всегда перпендикулярна направлению на Солнце.
Передача информации между космическими аппаратами этих систем позволяет осуществлять одновременное наблюдение оптико-электронными средствами обнаружения двух КА одного и того же космического объекта, который находится в так называемой зоне двойного обзора (ЗДО), то есть области космического пространства, наблюдаемой в данный текущий момент времени оптико-электронными средствами двух КА, и определение его углового положения относительно системы координат, выбранной за базовую. В результате этого с использованием информации о получаемых навигационным оборудованием координатах КА, осуществляющих наблюдение, возникает возможность триангуляционным методом определить с высокой точностью дальность до наблюдаемого в ЗДО космического объекта на основании однократного определения его углового положения в базовой системе координат оптико-электронными средствами обнаружения двух КА.
Данному аналогу присущ следующий основной недостаток: способ наблюдения, реализованный данной системой, не позволяет вести непрерывный (с периодичностью, не превышающей половины длительности периода обращения фрагментов КМ по орбите) и глобальный контроль околоземного космического пространства автономно, поскольку область космического пространства, образованная пересечением полей зрения различных КА-наблюдателей, в которой возможны триангуляционные измерения положения фрагментов КМ (зона двойного обзора), оказывается весьма ограниченной, что требует предварительного целеуказания с Земли.
Наиболее близкой по технической сущности к настоящему изобретению является космическая система, реализующая способ наблюдения за космическим мусором [2], выбранная в качестве прототипа.
Способ контроля космического пространства в ЗДО позволяет осуществлять оперативное и высокоточное определение координат наблюдаемых космических объектов в трехмерном пространстве при равномерном размещении по меньшей мере четырех КА наблюдения на круговой солнечно-синхронной орбите обратного наклонения. Величина радиуса орбиты составляет не менее Rатм/cos(π/N), где Rатм - максимальный радиус Земли с плотными слоями ее атмосферы; N - количество КА наблюдения.
На каждом КА наблюдения размещаются два оптико-электронных прибора, обладающих возможностью наблюдения соседних КА наблюдения, причем один из этих КА расположен в направлении орбитального движения данного КА наблюдения, а второй КА - в противоположном направлении.
ЗДО для контроля фрагментов КМ в геостационарной области формируются пересечением полей зрения дополнительных оптико-электронных каналов, размещенных на антиподных КА системы, т.е. имеющих противоположно направленные радиус-векторы собственного положения, причем ЗДО благодаря орбитальному движению КА осуществляют круговое сканирование области ГСО с периодом, равным периоду орбиты КА.
Попадание геостационарных КО в ЗДО происходит естественным образом за счет их орбитального движения, а также за счет кругового движения самих ЗДО. В зависимости от времени года тень Земли может незначительно ухудшать возможности системы, однако за счет задания оптимального значения угла расположения ЗДО относительно центра сканирования можно минимизировать это влияние.
Рассмотренный прототип имеет следующие недостатки:
- координатные измерения триангуляционным методом проводятся группой из нескольких КА, образующих регулярную группировку, обязательным условием функционирования которой является поддержание с высокой точностью взаимного положения КА. Для поддержания такой орбитальной структуры требуются большие запасы характеристической скорости на каждом КА;
- измерения положения КА на ГСО проводятся с КА на низкой орбите при большой дальности измерений.
Вышеперечисленные выявленные недостатки, присущие данному способу и реализующему его устройству, не позволяют выполнять определение вектора состояния космического объекта с точностью, требуемой для решения баллистической задачи наведения и стыковки с аварийным КА с целью проведения ремонтных работ.
Задачей предлагаемого нового технического решения является определение вектора состояния аварийного ПКО для проведения баллистических расчетов маневрирования АКО с минимальным расходом характеристической скорости в аварийно-спасательных работах.
Технический результат предлагаемого нового технического решения состоит в построении динамической стереотриангуляционной базы измерений оптико-электронной системой (ОЭС) одного АКО орбитальных параметров ПКО, а именно: координат и вектора скорости, в точке восходящего узла его орбиты, расположенной в экваториальной плоскости Земли на ГСО.
Способ наблюдения реализуется одним АКО автономно без целеуказания с Земли путем формирования динамических стереобаз наблюдения точки восходящего/нисходящего узла при минимальном времени наблюдения, сопоставимом с периодом обращения ПКО.
Указанный технический результат достигается тем, что способ определения вектора состояния пассивного космического объекта включает в себя определение углового положения и координат точки восходящего узла орбиты ПКО и построение в окрестности этой точки динамической стереобазы для определения вектора скорости, с последующим пересчетом этих параметров в одной точке орбиты в 6-мерный вектор состояния ПКО - единый параметр, характеризующий орбиту и движение ПКО по ней. Долгота восходящего узла орбиты ПКО, совершающего кеплерово движение, имеет постоянное значение в инерциальной геоцентрической системе координат (ИГСК). ПКО при орбитальном движении попадает с периодичностью в одни сутки в эту точку космического пространства, принадлежащую экваториальной плоскости Земли. АКО двигается в экваториальной плоскости Земли по орбите с меньшими радиусом и периодом, чем ПКО, и его положение известно с высокой точностью по измерениям инерциально-спутниковой автономной системы навигации (АСН). ОЭС АКО находит в космическом пространстве точку восходящего узла орбиты ПКО и при периодических появлениях ПКО в этой точке измеряет драконический период обращения ПКО. При этом на каждом витке АКО приближается к ПКО на определенное расстояние. За n витков орбиты эти отрезки образует динамическую базу стереотриангуляционных измерений координат точки восходящего узла орбиты ПКО, а также дополнительно двух точек орбиты, находящихся до и после узловой точки орбиты ПКО вне экваториальной плоскости Земли, по которым измеряется вектор скорости.
Реализация способа иллюстрируется на фиг.1-4.
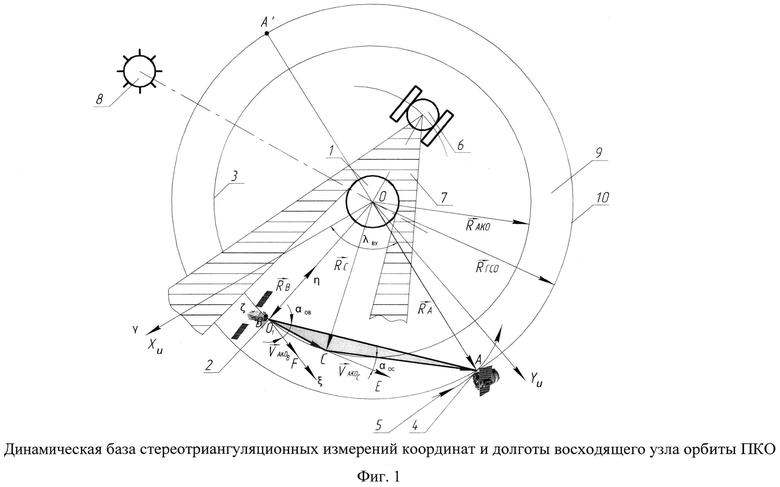
На фиг.1 представлена динамическая база стереотриангуляционных измерений координат 
В визирной системе координат [3] O1ξηζ, с началом координат в центре масс О1 АКО 2 линия визирования O1F всегда совпадает с направлением вектора скорости 
Моменту первого пересечения координатной плоскости O1ξη соответствует точка В орбиты АКО 2 с координатами 



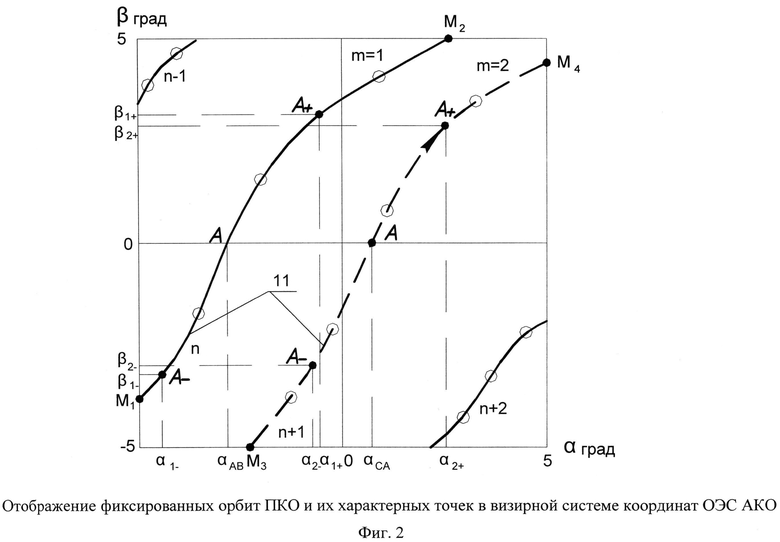
На фиг.2 отображены зафиксированные в визирной системе координат O1ξηζ ОЭС АКО 2 фрагменты траекторий 11 ПКО 4 в окрестности точки восходящего узла А орбиты 5 ПКО 4 на нескольких витках n. Направление движения ПКО 4 указано стрелками. Через m обозначена новая нумерация витков. Точки М1 и М3 соответствуют вхождению ПКО 4 в поле зрения ОЭС АКО 2, а точки М2 и М4 - выходу ПКО 4 из поля зрения ОЭС АКО 2. Точки А- и А+ с координатами {αm-,βm-} и {αm+,βm+} соответственно, где m - номер витка, соответствуют окрестности точки восходящего узла А орбиты ПКО 4.
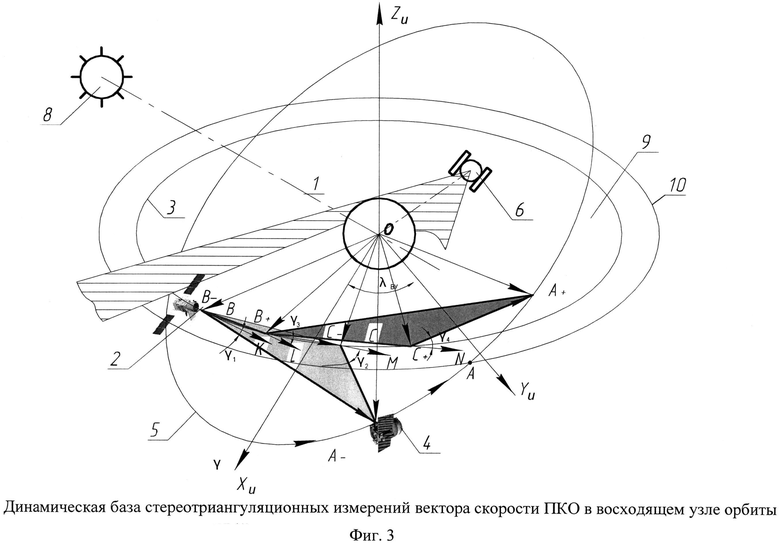
На фиг.3 приведена динамическая база стереотриангуляционных измерений вектора скорости ПКО 4 в восходящем узле А его орбиты 5. Точки В- и В+ соответствуют окрестности точки В орбиты 3 АКО 2 на витке n орбиты ПКО 4, а точки С- и С+ - окрестности точки С орбиты 3 АКО 2 на витке n+1 орбиты ПКО 4.
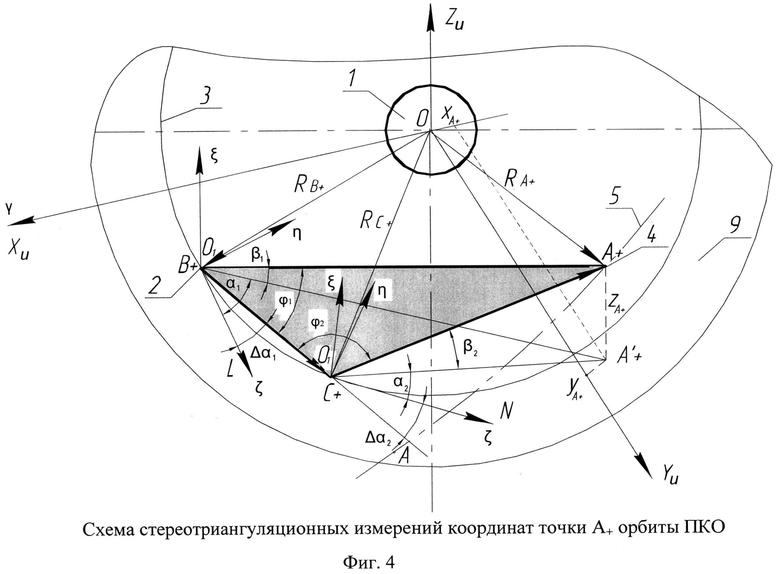
На фиг.4 приведена геометрия измерений координат точки орбиты 5 ПКО 4, находящейся вне экваториальной плоскости 9 Земли 1. Угол φ - это угол между векторами, образующими динамическую базу, и направлением визирования на точки А- и А+ орбиты 5 ПКО 4. Точка 
Предложенный способ реализуется следующим образом.
В процессе дрейфа по орбите 3 с минимальными затратами характеристической скорости АКО 2 наблюдает фрагменты орбит космических объектов, попадающих в поле обзора его ОЭС. В течение года последовательно фиксируются все КО в области ГСО и измеряются их орбитальные параметры. Фрагмент орбиты 5 ПКО 4, заранее неизвестной и расположенной произвольно в области ГСО, попадающий в поле зрения ОЭС АКО 2, приведен на фиг.1. Отметки от наблюдаемых космических объектов отображаются в плоскость изображений ОЭС АКО 2 в виде дискретных точек с координатами {α(ti),β(ti)}, где ti - моменты времени опроса ОЭС в собственном времени АКО 2. В момент наблюдения каждый космический объект, попадающий в поле обзора АКО 2, совершает периодические движения в поле тяжести Земли 1 в геостационарной области космического пространства независимо от АКО 2 и других космических объектов искусственного происхождения, расположенных в области ГСО, причем движение космических объектов обусловлено только действием сил гравитации, т.е. космические объекты являются пассивными. При этом отметки от всех попадающих в поле обзора АКО 2 пассивных космических объектов разрешаются ОЭС АКО 2, и каждый ПКО 4 представляет собой независимый объект наблюдения.
В ИГСК OXИYИZИ, в кеплеровом приближении долгота восходящего узла λВУ орбиты ПКО 4 имеет постоянное значение, т.е. ПКО 4 с периодичностью ТПКО будет постоянно заходить в точку восходящего узла А космического пространства. Постоянное значение в ИГСК также имеет точка нисходящего узла А' орбиты ПКО 4. Однако только одна из двух узловых точек орбиты доступна для регистрации оптико-электронной системой АКО 2. Это связано с тем, что при наблюдении ПКО 4 по наличию сигналов, обусловленных отражением солнечного света от корпуса ПКО 4, регистрация отметок возможна при благоприятной светотеневой обстановке в момент измерений, которая определяется угловым положением Солнца 8, оптической оси ОЭС АКО 2 и центра масс ПКО 4 (далее ПКО 4). Благоприятная светотеневая обстановка характеризуется тем, что Солнце 8 и АКО 2 должны находиться в одной полуплоскости относительно линии узлов АА' орбиты ПКО 4, что на протяжении каждого года характерно в течение примерно полугода для восходящего узла А орбиты 5 ПКО 4, а в последующие полгода - для нисходящего узла А'. Без ограничения общности рассуждений дальнейшая реализация способа будет относиться к точке восходящего узла. А орбиты 5 ПКО 4.
Угловые координаты {α(ti),β(ti)} ПКО 4 в визирной системе координат отсчитываются по осям O1η и O1ζ, соответственно, причем линейные координаты визирной системы калибруются в угловые. При этом момент перехода орбиты 5 ПКО 4 из северного в южное полушарие будет фиксироваться в визирной системе координат O1ξηζ АКО 2 по изменению знака угловой координаты β при пересечении координатной плоскости O1ξη, расположенной в экваториальной плоскости 9. Поскольку измерения углового положения ПКО 4 в визирной системе координат АКО 2 проводятся дискретно (фиг.2), то для определения точного времени пересечения траекторией ПКО 4 координатной плоскости O1ξη дискретные точки аппроксимируются интерполяционным полиномом с помощью известных формул [4].
Поиск точки восходящего узла А орбиты 5 ПКО 4 в области ГСО выполняется в процессе дрейфа АКО 2. Поскольку RAKO<RГСО, то период обращения TAKO будет меньше периода ТПКО, поэтому АКО 2 постоянно смещается относительно ПКО 4, сближаясь с ним по замкнутой орбите 3 до расстояния, при котором выполняются фоно-целевые условия обнаружения ПКО 4 оптико-электронной системой АКО 2. Последовательность зафиксированных в процессе поиска точек образует траекторию движения ПКО 4, по которой вычисляется интерполяционный полином и определяется зависимость β=β(α(t)) для данного измерения на текущем витке орбиты 5 ПКО 4. При этом сразу после первого обнаружения ПКО 4 фрагмент орбиты 5 этого объекта, попавший в поле зрения ОЭС АКО 2, может не пересечь координатную плоскость O1ξη. В этом случае наблюдение продолжается на следующих витках орбиты ПКО 4 до момента пересечения координатной плоскости O1ξη. Время t1 прохождения точки А восходящего узла орбиты ПКО 4 определяется из решения уравнения β(α(t))=0. Этому моменту соответствует точка В орбиты АКО 2 с угловой координатой αOB в визирной системе координат O1ξηζ АКО 2, при этом линия визирования BF ОЭС АКО 2 совпадает с направлением вектора скорости АКО 2 в точке В
После проведения наблюдений ПКО 4 в окрестности точки В орбиты 3 АКО 2, ПКО 4 выходит из поля зрения ОЭС АКО 2 и не наблюдается до момента времени входа в поле зрения ОЭС АКО 2 на следующем витке своей орбиты 5, при этом после входа в поле зрения ОЭС АКО 2 на этом витке снова фиксируется точка восходящего узла А орбиты 5 ПКО 4, которому соответствует точка С орбиты 3 АКО 2 с координатами
После измерения времен t1 и t2, соответствующих прохождению точек В и С орбиты 3 АКО 2, определяется драконический период орбиты 5 ПКО 4 по формуле ТПКО=t2-t1. На последующих витках орбиты 5 ПКО 4 происходит набор точности измерений и уточнение величины драконического периода орбиты 5 ПКО 4 по формуле 
За время ТПКО АКО 2 сместится по орбите 3 из точки В в точку С на расстояние, равное 




В картинной плоскости O1ξηζ ОЭС АКО 2 орбиты 5 разделяются, т.к. происходит поворот визирной системы координат, связанный с поворотом АКО 2 и, соответственно, его вектора скорости (фиг.2). Из всех зафиксированных в картинной плоскости витков в рассмотрение принимаются только те фрагменты траекторий 11, которые содержат точку восходящего узла А.
После обнаружения точки восходящего узла А орбиты 5 ПКО 4 в первый раз после начала измерений нумерация витков изменяется: номер витка n принимается равным m=1 и за начало его отсчета принимается точка М1 вхождения ПКО 4 в поле зрения ОЭС АКО 2. Для определения вектора состояния ПКО 4, как отождествленного с данными бортового каталога, так и ранее неизвестного, используются фрагменты траекторий 11 М1М2, попавшие в поле зрения ОЭС АКО 2 на n-м витке орбиты 5 ПКО 4, и М3М4, попавшие в поле зрения ОЭС АКО 2 на (n+1)-м витке орбиты 5 ПКО 4, что в принятой новой нумерации соответствует m=1 и m=2 виткам орбиты 5 ПКО 4.
Таким образом, после обнаружения точки восходящего узла А орбиты 5 ПКО 4 на втором витке и расчета ее координат проводится идентификация ПКО 4 с данными бортового каталога наблюдаемых космических объектов, размещенного в памяти бортового компьютера АКО 2. Если расхождение положения восходящего узла А орбиты 5 ПКО 4 с одним из объектов, зафиксированных в бортовом каталоге наблюдаемых космических объектов, не превышает погрешности АСН 6, то принимается решение об отождествлении орбиты 5 ПКО 4 с указанным объектом бортового каталога. Если положение восходящего узла А орбиты 5 ПКО 4 не совпадает с точностью до погрешности АСН 6 ни с одним из объектов бортового каталога, то принимается решение об обнаружении нового ПКО 4.
Каждая точка восходящего узла А рассматривается с окрестностью, имеющей смещение по времени от времени прохождения точки восходящего узла А на время -Δt/2 и +Δt/2, где Δt≈50÷100 секунд << ТПКО, причем эти участки траектории 11 ПКО 4 находятся вне экваториальной плоскости 9 Земли 1. В картинной плоскости этим моментам времени соответствуют точки А- и А+. Они имеют координаты {αm-,βm-} и {αm+,βm+} соответственно, где m - номер витка.
За время Δt АКО 2 сдвигается на расстояние, равное 




Далее определяются координаты в ИГСК точек А- и А+. орбиты 5 ПКО 4, находящихся вне экваториальной плоскости 9 Земли 1. Угол φ (фиг.4) между векторами, образующими динамическую базу, и направлением визирования на точки А- и А+ орбиты 5 ПКО 4, вычисляется по формуле 

Координаты xA+ и yA+ точки А+ определяются как координаты точки 

После вычисления координат точек А- и А+ вектор скорости ПКО 4 определяется с помощью известной формулы численных методов дифференцирования 
Точка А, по которой определяется угловое положение восходящего узла орбиты 5 ПКО 4, находится на n-м витке орбиты 5 ПКО 4, и на ней же расположены точки А- и А+. Точки В, В- и В+ орбиты 3 АКО 2 также определяются на n-м витке орбиты 5 ПКО 4. Точки С, С- и С+ орбиты 3 АКО 2 определятся на (n+1)-м витке орбиты 5 ПКО 4. При этом измерения в точках С- и С+ проводятся синхронно по времени с измерениями в точках В- и В+. Для определения вектора скорости достаточно измерить фрагмент траектории 11 ПКО 4 на витке m=1 от точки М1 до точки М2 и фрагмент траектории 11 ПКО 4 на витке m=2 от точки М3, до точки А+ (фиг.2), т.е. на участке, длительность которого фактически равна периоду одного полного витка орбиты 5 ПКО 4.
По этим начальным условиям в одной точке орбиты ПКО - точке восходящего узла, включающим время прохождения восходящего узла, его положение и скорость ПКО в нем, однозначно определяется вектор состояния ПКО [5], включающий следующие орбитальные параметры: фокальный параметр р, эксцентриситет е, долгота восходящего узла Ω, наклонение i, аргумент перицентра ω и момент прохождения перицентра tπ. Точность вычислений будет сопоставима с точностью АСН. Поскольку АКО совершает кеплеровское движение и не совершает никаких маневров, то расход характеристической скорости АКО будет минимальным. На последующих витках орбиты ПКО точность определения вектора состояния повышается за счет увеличения стереобазы и уточнения драконического периода обращения ПКО.
По материалам заявки на предприятии в настоящее время проведено моделирование процессов навигации АКО и ПКО, результаты которого подтвердили возможность получения указанным способом всех необходимых исходных данных для определения элементов орбиты ПКО по его положению и скорости в один момент времени. При этом достигается следующий технический результат:
- задание визирной системы координат АКО таким образом, что одна из осей расположена в экваториальной плоскости Земли, позволяет обнаружить и выделить в трехмерном космическом пространстве точку восходящего узла орбиты космического объекта с постоянными параметрами в ИГСК, зафиксировать ее угловое положение и момент времени прохождения с высокой точностью и таким образом получить один из ключевых параметров для идентификации космического объекта на ГСО по каталогам космических объектов;
- определение драконического периода ПКО после второго прохождения им восходящего/нисходящего узла орбиты и фиксация положений АКО в ИГСК, соответствующих моментам времени прохождения ПКО восходящего/нисходящего узла орбиты, позволяет построить стереобазу для измерений при условии, что и наблюдатель и наблюдаемый объект находятся в постоянном пространственном кеплеровском движении с произвольными параметрами, в том числе относительно друг друга;
- определение вектора скорости ПКО, а затем по измеренным параметрам и вектора состояния ПКО позволяет заменить двухпозиционные измерения, применяемые в классическом методе, на однопозиционные, позволяющие сократить численность орбитальной группировки в 2 раза при равной дальности обнаружения оптико-электронным прибором АКО в случае однопозиционной работы и последующей обработкой бортовым вычислительным комплексом, а также обеспечивает снижение массы полезной нагрузки примерно вдвое, пропорционально количеству используемых АКО;
- сохранение в памяти бортового компьютера АКО фрагментов траекторий ПКО на двух последовательных витках орбиты ПКО и наличие на борту АКО бортового каталога наблюдаемых космических объектов позволяет при автономной работе АКО без целеуказания с наземного пункта однозначно определить вектор состояния ПКО через один полный виток после момента времени первой регистрации восходящего узла орбиты ПКО с точностью, сопоставимой с точностью АСЫ, а также обнаруживать неизвестные космические объекты, не идентифицированные с данными существующих каталогов космических объектов, или объекты, положение которых изменилось в результате аварии;
- проведение всех измерений КА-наблюдателем в процессе дрейфа по выбранной орбите, без совершения маневров, позволяет минимизировать расход характеристической скорости КА-наблюдателя для реализации данного метода.
Список литературы
1. www.globalsecurity.org
2. Малые космические аппараты информационного обеспечения. / Под ред. В.Ф. Фатеева. - М.: Радиотехника, 2010. - 320 с.
3. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. - М.: Машиностроение, 1974, 340 с.
4. Джонсон Н., Лион Ф. Статистика и планирование эксперимента в технике и науке. - М.: Мир, 1980.
5. Механика космического полета. / Под ред. В.П. Мишина. - М.: Машиностроение, 1989. - 408 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора геостационарной области для наблюдения элементов космического мусора и других объектов с космического аппарата на полусуточной высокоэллиптической орбите | 2017 |
|
RU2659379C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2441821C1 |
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2440281C1 |
| Способ определения последовательности перелётов между объектами космического мусора в окрестности геостационарной орбиты | 2020 |
|
RU2759026C1 |
| ПЛАНШЕТ ДЛЯ ВЫБОРА ОБЪЕКТОВ НАБЛЮДЕНИЯ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2341773C2 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| ПЛАНШЕТ ДЛЯ ВЫБОРА ОБЪЕКТА НАБЛЮДЕНИЯ С ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2327111C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 1988 |
|
RU2076059C1 |
Изобретение относится к способам наблюдения за космическими объектами (КО) с помощью оптико-электронных средств и м.б. использовано для определения орбиты пассивного КО (ПКО) на геостационарной орбите автономно с борта активного КО (АКО). В процессе дрейфа по квазигеостационарной орбите (с меньшими радиусом и периодом, чем ПКО) АКО выполняет поиск и обнаружение ПКО. После этого определяется точка восходящего или нисходящего узла орбиты ПКО. По периодическим появлениям ПКО в этой точке определяют драконический период обращения ПКО. На каждом витке АКО приближается к ПКО на определенное расстояние. За два витка эти расстояния образуют динамическую базу стерео-триангуляционных измерений координат указанной узловой точки орбиты ПКО. По двум дополнительным точкам орбиты, находящимся до и после узловой точки вне экваториальной плоскости Земли, измеряют вектор скорости ПКО. После определения координат узловой точки и вектора скорости ПКО однозначно, за время полного витка после момента первой регистрации указанной точки, рассчитывают 6-мерный вектор орбитального движения ПКО. Технический результат изобретения состоит в минимизации числа АКО, времени наблюдения ПКО и соответствующих затрат характеристической скорости. 4 ил.
Способ определения вектора состояния пассивного космического объекта (ПКО) на геостационарной орбите (ГСО) с активного космического объекта (АКО), движущегося по квазигеостационарной орбите, включающий дрейф АКО по квазигеостационарной орбите с наклонением, близким к нулю градусов, поиск и обнаружение ПКО оптико-электронной системой (ОЭС) АКО, после чего АКО выполняет серию измерений угловых координат ПКО в визирной системе координат АКО при нахождении ПКО в пределах поля зрения ОЭС АКО, причем одна ось визирной системы координат АКО направлена вдоль вектора скорости АКО, вторая ось расположена в экваториальной плоскости Земли и направлена в центр Земли по радиусу-вектору АКО, третья ось дополняет визирную систему координат до правой, а автономная инерциально-спутниковая система навигации АКО, включающая измерения систем ГЛОНАСС и/или GPS, осуществляет получение информации о положении и скорости центра масс АКО на орбите, отличающийся тем, что ОЭС АКО на каждом его витке после вхождения ПКО в пределы поля зрения ОЭС АКО и вплоть до момента выхода ПКО за его пределы измеряет угловые положения ПКО в своей визирной системе координат и запоминает их в бортовом компьютере, а при каждом пересечении траекторией ПКО координатной оси визирной системы координат АКО, расположенной в экваториальной плоскости Земли и соответствующей точке восходящего или нисходящего узла орбиты ПКО, бортовой компьютер АКО вычисляет соответствующие моменты времени и фиксирует в своей памяти положение АКО в инерциальной геоцентрической системе координат (ИГСК) в эти моменты времени, кроме того, после второго пересечения ПКО координатной оси визирной системы АКО, расположенной в экваториальной плоскости Земли, определяется его драконический период и соответствующее этому моменту времени положение АКО в ИГСК, которое совместно с точкой положения АКО на первом витке образует стереобазу в ИГСК, причем при наличии n периодов измерений образуется  динамических стереобаз наблюдения точки восходящего или нисходящего узла, затем по точкам орбиты АКО, находящимся через равные промежутки времени до и после точки восходящего или нисходящего узла орбиты ПКО, бортовой компьютер АКО вычисляет стереотриангуляционным методом координаты точек орбиты ПКО в ИГСК, отстоящих на те же промежутки времени синхронно измерениям точки восходящего или нисходящего узла орбиты ПКО, и далее определяет вектор скорости ПКО вблизи точки восходящего или нисходящего узла с использованием координат АКО, полученных по результатам измерений автономной инерциально-спутниковой системы навигации АКО, затем по измеренным параметрам определяет вектор состояния ПКО.
динамических стереобаз наблюдения точки восходящего или нисходящего узла, затем по точкам орбиты АКО, находящимся через равные промежутки времени до и после точки восходящего или нисходящего узла орбиты ПКО, бортовой компьютер АКО вычисляет стереотриангуляционным методом координаты точек орбиты ПКО в ИГСК, отстоящих на те же промежутки времени синхронно измерениям точки восходящего или нисходящего узла орбиты ПКО, и далее определяет вектор скорости ПКО вблизи точки восходящего или нисходящего узла с использованием координат АКО, полученных по результатам измерений автономной инерциально-спутниковой системы навигации АКО, затем по измеренным параметрам определяет вектор состояния ПКО.
| Приспособление для шлифовки винтовых поверхностей на плоскошлифовальных станках | 1949 |
|
SU82678A1 |
| RU 2009136088 A, 10.04.2011 | |||
| RU 2011150073 А, 08.12.2011 | |||
| JP 2008064566 A, 21.03.2008 | |||
| US 6219617 B1, 17.04.2001 | |||
| US 4375697 А, 01.03.1983 | |||
| WO 1999040692 A1, 12.08.1999 | |||
| УСТРОЙСТВО ОСУШЕНИЯ И УВЛАЖНЕНИЯ, ОСУШИТЕЛЬ-ОЧИСТИТЕЛЬ ВОЗДУХА, УВЛАЖНИТЕЛЬ-ОЧИСТИТЕЛЬ ВОЗДУХА И СПОСОБ ИХ ЭКСПЛУАТАЦИИ | 2015 |
|
RU2689855C2 |

