Известно транспортное средство Segway, выпускаемое американской фирмой Segway LLC, состоящее из двух колес, расположенных на одной оси с расположенной между ними площадкой для ног. Водитель располагается стоя на площадке и держится за ручку управления транспортным средством. Транспортное средство использует сложную систему гироскопов и компьютеров и двигается вперед и назад в соответствии с наклоном тела водителя. Поворот транспортного средства осуществляется поворотом ручки управления.
Недостатками этого транспортного средства является его ширина, вызывающая ограничения, связанные с его использованием в общем потоке пешеходов. Известно транспортное средство Honda U3-X, состоящее из одного сложного колеса и системы электронной стабилизации положения водителя. Основное колесо имеет возможность вращения вокруг собственной оси, а также имеет множество маленьких колес, расположенных вокруг его обода с возможностью вращения. Оси маленьких колес находятся в плоскости основного колеса, что позволяет транспортному средству перемещаться в направлении, перпендикулярном плоскости основного колеса, а при одновременном вращении большого и маленьких колес - в любом направлении, выбранном водителем. Управление транспортным средством осуществляется наклоном тела водителя, которое контролируется системой гиродатчиков и электронной схемой управления.
Использование этого транспортного средства из-за наличия маленьких колес ограничено поверхностью, по которой передвигается транспортное средство. Поверхность должна быть твердой и достаточно чистой, например офисный пол.
Известно также одноколесное транспортное средство и устройство стабилизации транспортного средства 2456195 C2 МПК B62K 1/00 B62H 1/10 B62D 37/06, состоящее из рамы и установленных на раме колеса, электродвигателя для вращения колеса, по меньшей мере одного гиродатчика, соединенного с ним блока управления транспортным средством, предназначенным для обработки измерений гиродатчиком углового отклонения рамы от вертикального положения в плоскости направления движения одноколесного транспортного средства и изменения скорости и направления вращения электродвигателя, блока аккумуляторов, подставок для ног водителя, установленных на раме с обеих сторон от колеса, отличающееся тем, что одноколесное транспортное средство дополнительно снабжено устройством стабилизации транспортного средства, включающим в себя два маховика, установленных на раме, которые вращаются в противоположных направлениях и установлены с возможностью отклонения в плоскости, перпендикулярной направлению движения транспортного средства, при этом оси вращения маховиков параллельны, оба маховика снабжены упорами, установленными таким образом, что при наклоне одноколесного транспортного средства в сторону от вертикального положения ось вращения первого маховика сохраняет вертикальное положение, а ось вращения второго маховика отклоняется на угол отклонения транспортного средства от вертикального положения.
Недостатком транспортного средства этого типа является сложность; дороговизна и большой вес, препятствующий возможности его переноса пользователем при необходимости.
Кроме того, известно устройство для транспортирования RU 2245267 МПК B62K 1/00, B62K 17/00, B62K 23/00, B62J 1/04, B60N 2/24, B62D 37/00, B62D 61/00, A61G 5/04, A61G 5/10, отличающееся тем, что оно снабжено расположенной в продольной плоскости платформой поддержания полезной нагрузки, в частности человека, модулем контакта с поверхностью передвижения, содержащим элемент контакта с поверхностью передвижения, установленный подвижно присоединенным к платформе, опорой для человека и приводом, причем элемент контакта с поверхностью передвижения имеет область контакта с поверхностью передвижения, а платформа и модуль контакта с поверхностью передвижения выполнены составными частями в едином узле с центром тяжести, имеющим определенное относительно элемента контакта с поверхностью передвижения положение, при этом опора установлена соединенной с платформой с возможностью изменения положения центра тяжести в продольной плоскости посредством смещения человеком опоры относительно платформы, а привод установлен соединенным с модулем контакта с поверхностью передвижения с возможностью подачи энергии к модулю контакта с поверхностью передвижения в зависимости от положения центра тяжести.
Использование этого транспортного средства из-за наличия маленьких колес ограничено поверхностью, по которой передвигается транспортное средство. Поверхность должна быть твердой и достаточно чистой. Кроме того, принцип работы данного транспортного средства заключается в том, что воспринимаемый наклон транспортного средства в продольной плоскости должен компенсироваться приложением крутящего момента к элементу контакта с поверхностью передвижения действием контура управления и механизированного привода колес, установленного соединенным с модулем контакта с поверхностью передвижения с возможностью подачи энергии (усилия) к модулю контакта с поверхностью передвижения в зависимости от положения центра тяжести. Это устройство характеризуется сложной системой управления, содержащей датчики и исполнительную систему, управляемую в зависимости от показателей датчиков и требующую очень высокого быстродействия по условиям обеспечения устойчивости. Однако инерционные элементы системы и особенно механические элементы привода затрудняют достижение требования столь высокого быстродействия. Известен также SBU V2.0 - самобалансирующийся электрический велосипед компании Focus Designs, содержащий колесо, раму и устройство гиростабилизации и управления акселерометром. SBU обеспечивает передний и задний баланс, водителю необходимо заботиться о балансировке слева и справа. Водитель наклоняется вперед или назад для контроля скорости, ускорения или остановки. Недостатком этого устройства является сложность, дороговизна, и большой вес.
Наиболее близким по технической сущности к предлагаемому устройству является балансирующий уницикл Self Balancing Unicycle, фирмы Focus Designs, содержащий раму, установленное в ней на подшипниках колесо, седло, закрепленное на раме, и стабилизирующее устройство, содержащее систему акселерометров и гироскопов, помогающих поддерживать вертикальное положение. Недостатком этого устройства является сложность, дороговизна и большой вес.
Задачей, на решение которой направлено изобретение, является уменьшение сложности, дороговизны и веса транспортного средства.
Задача решается за счет того, что:
1. На раме закреплены перпендикулярно к плоскости рамы три оси, лежащие в одной плоскости таким образом, что крайние оси расположены на равных расстояниях от оси в средней точке.
2. Транспортное средство снабжено механизмом шарнирного параллелограмма, основание которого содержит двуплечий рычаг, шарнирно установленный на средней оси.
3. На крайних осях установлены мотор-колеса.
4. Основание механизма шарнирного параллелограмма шарнирно соединено с двумя кривошипами, шарнирно же связанными с шатуном.
5. В средней точке шатуна механизма шарнирного параллелограмма закреплено седло.
6. На средней оси неподвижно закреплено центральное зубчатое колесо, с которым через паразитное колесо входит в зацепление сателлит, жестко соединенный с кривошипом.
7. Паразитное зубчатое колесо и сателлит шарнирно установлены на осях, закрепленных на двуплечем рычаге.
В литературе не представлено описание предлагаемого устройства стабилизации.
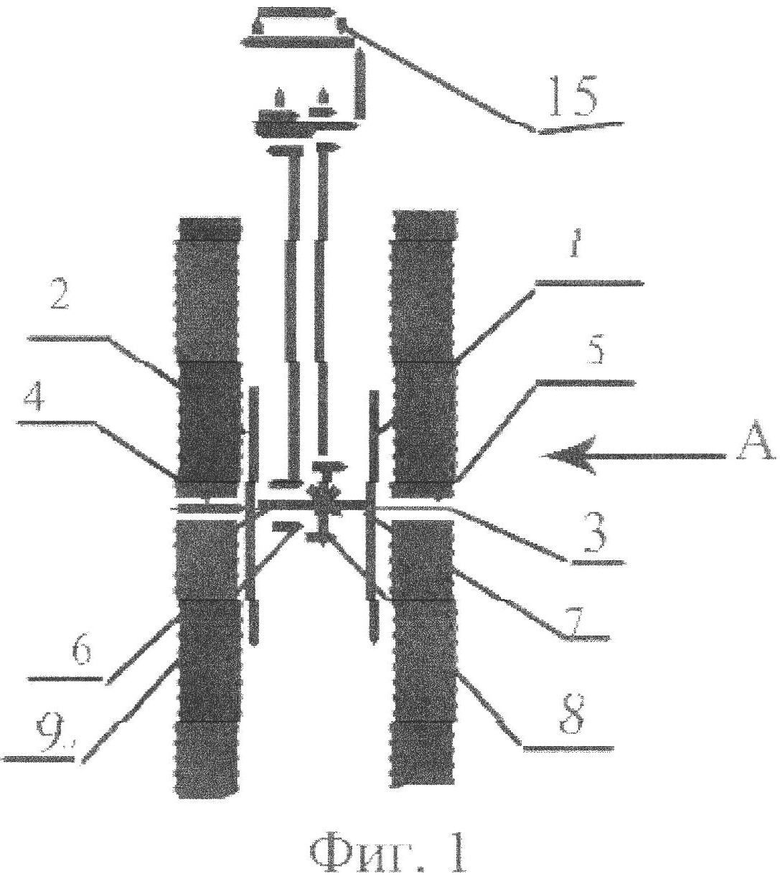
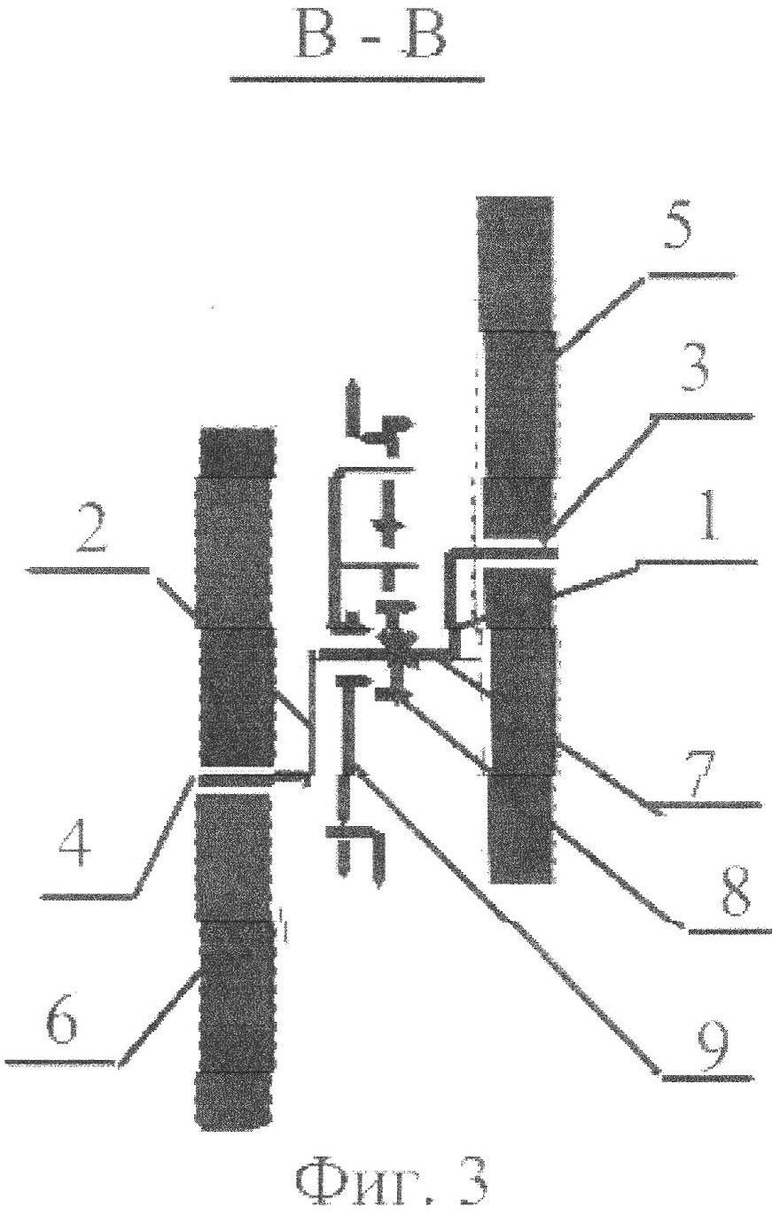
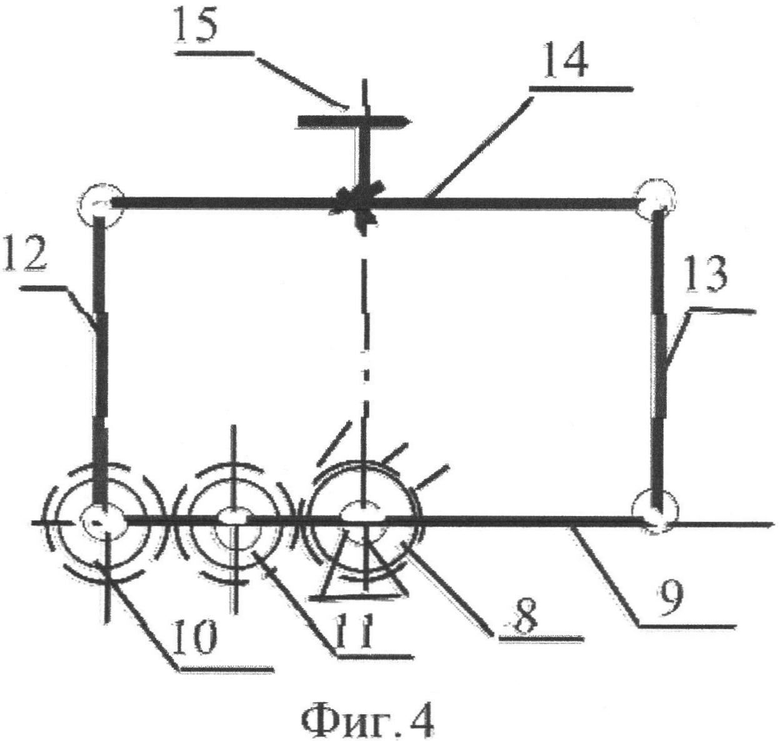
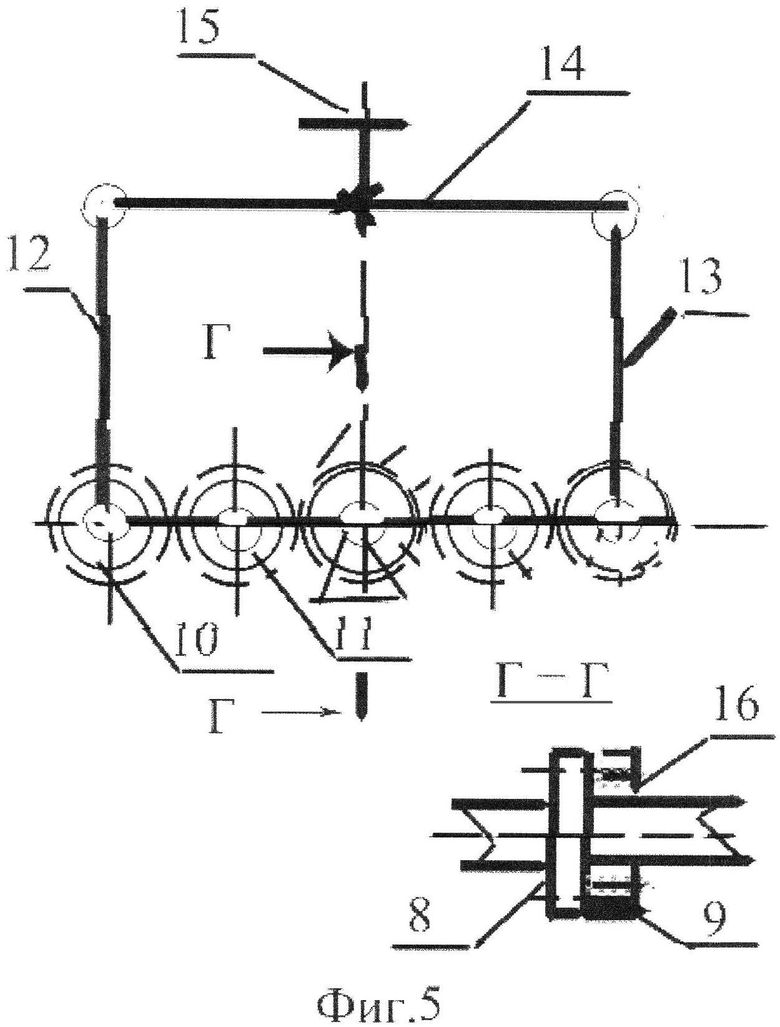
Сущность изобретения поясняется чертежами, где на фиг.1 представлена кинематическая схема транспортного устройства, на фиг.2 - вид по стрелке А, на фиг.3 - вид по В-В, на фиг. 4 - схема устройства стабилизации, на фиг.5 - схема устройства стабилизации с сателлитами, расположенными на обоих плечах двуплечего рычага и с закреплением двухплечего рычага с использованием металлорезинового шарнира, на фиг.6 - схема сил, действующих на звенья транспортного средства при воздействии сил инерции, на рисунке 7 - схема сил, действующих на звенья транспортного средства при смещении центра масс от оси симметрии шатуна.
Транспортное устройство, представленное на фиг.1, содержит раму, составленную из двух щек 1 и 2. На щеках рамы перпендикулярно их плоскости закреплены две оси оси 3 и 4. На этих осях установлены мотор-колеса 5 и 6. Щеки 1 и 2 стягиваются между собой осью 7, расположенной параллельно осям 3 и 4 и на равных расстояниях от них. Мотор-колесо 5 установлено на оси 3, а мотор-колесо 6 - на оси 4. На оси 7 жестко закреплено зубчатое колесо 8 и шарнирно установлен двуплечий рычаг 9. Зубчатое колесо 8 входит в зацепление с зубчатым сателлитом 10 через зубчатое колесо - паразит 11. Зубчатый сателлит 10 и зубчатое колесо-паразит 11 шарнирно установлены на двуплечем рычаге 9. Двуплечий рычаг 9 вместе с кривошипами 12 и 13 и шатуном 14 образуют механизм шарнирного параллелограмма. На шатуне 14, на одинаковых расстояниях от его концов закреплено седло 15.
В одном из вариантов транспортное средство содержит зубчатый сателлит 10 и зубчатое колесо-паразит 11 на одном плече рычага (фиг.4), в другом - на обоих (фиг.5). Кроме того, возможен вариант, когда двуплечий рычаг 9 установлен на оси 7 не шарнирно, а через металлорезиновый шарнир 16 - с малой величиной жесткости (фиг.5).
Транспортное средство работает следующим образом:
1. При необходимости в прямолинейном движении седок с помощью джойстика устанавливает одинаковые скорости вращения роторов мотор-колес. Равенство скоростей и обеспечивает прямолинейное движение транспортного средства.
2. При необходимости повернуть направо (налево) скорости левого (правого) колеса с помощью джойстика придается большая скорость, что и обеспечивает соответствующий поворот. Интенсивность поворота определяется значением разности скоростей, диктуемой через джойстик.
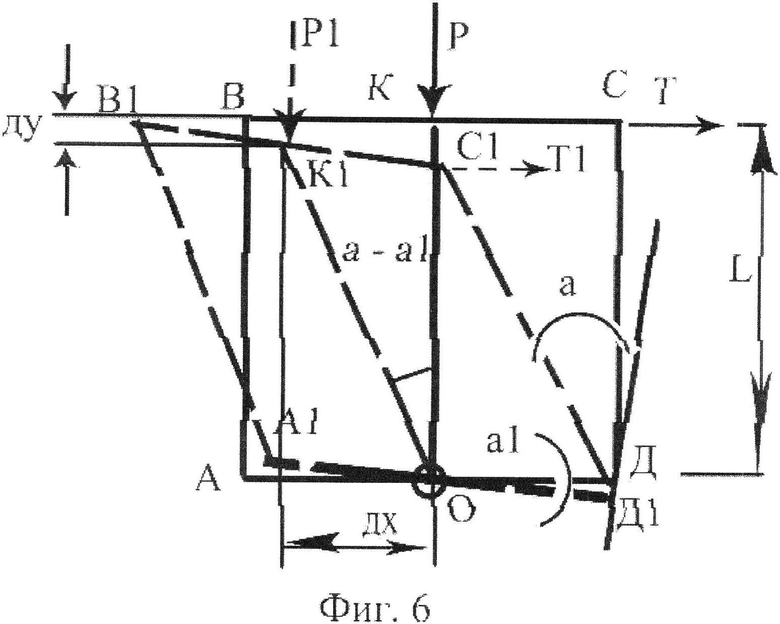
3. Обеспечение устойчивости при воздействии горизонтальных продольных сил (инерции) Т устойчивость обеспечивается следующим образом: при воздействии на седока горизонтальной силы Т возникает момент этой силы относительно оси вращения О двуплечего рычага 9. (фиг.6). Под воздействием этого момента механизм шарнирного параллелограмма поворачивается относительно точки О в направлении действия момента силы (инерции) Т. При этом плечо двуплечего рычага 9 играет роль водила в планетарной передаче с центральным неподвижным зубчатым колесом 8 и зубчатым сателлитом 10 и зубчатым колесом-паразитом 11.
При этом зубчатый сателлит 10 вместе с жестко закрепленным с ним кривошипом 12 начинает поворачиваться относительно двуплечего рычага 9 в направлении, противоположном направлению поворота двуплечего рычага 9.
В соответствии с уравнением Виллиса для планетарных передач величина угла этого поворота равна а=-al х i, где i - передаточное отношение от зубчатого колеса 8 к зубчатому сателлиту 10. Знак минус в этом уравнение показывает, что зубчатый сателлит 10 поворачивается в противоположном направлении повороту двуплечему рычаг, поскольку зубчатая передача от зубчатого колеса 8 к зубчатому сателлиту 10 через зубчатое колесо-паразит 11 содержит четное число внешних зацеплений. При этом механизм шарнирного параллелограмма из состояния АВСД переходит в состояние А1В1С1Д1, а средняя точка шатуна 14 - К, в которой закреплено седло 15, смещается в положение К1.
Величина этого смещения в вертикальном направлении равна ду=Lcos(а-a1), а в горизонтальном направлении - дх=-Lsin(a-a1).
Так как перемещение дх имеет знак минус, то работа горизонтальной силы Т на этом перемещении отрицательна, что компенсируется положительной работой силы тяжести седока Р, с перемещением ду по направлению, совпадающему с направлением Р.
Такое перемещение будет продолжаться до тех пор, пока не установится равновесие двуплечего рычага относительно шарнира в точке О. Это условие может быть записано в виде: (Т)х(Lcos(a-a1))=(Р)х(Lsin(a-a1)). Или при отношении сил Т/Р=tg(а-a1).
Учитывая, что сила инерции пропорциональна массе седока, получим, что коэффициент перегрузки, равный отношению величины горизонтального ускорения к величине ускорения свободного падения, обеспечивается условием: k=tg(а-a1).
Если принять k=1, то условие будет обеспечено при а-a1)=45°. Если принять передаточное число от зубчатого колеса 8 к зубчатому сателлиту 10 равным 6, то получим, что двуплечий рычаг 9 при этом повернется всего на 15° относительно оси 7.
Этот угол будет еще меньше в случае установки двуплечего рычага 9 не шарнирно на оси 7, а через металлорезиновый шарнир 16.
После падения силы инерции Т сила тяжести Р будет поворачивать двуплечий рычаг 9 в исходное (до действия силы инерции) положение.
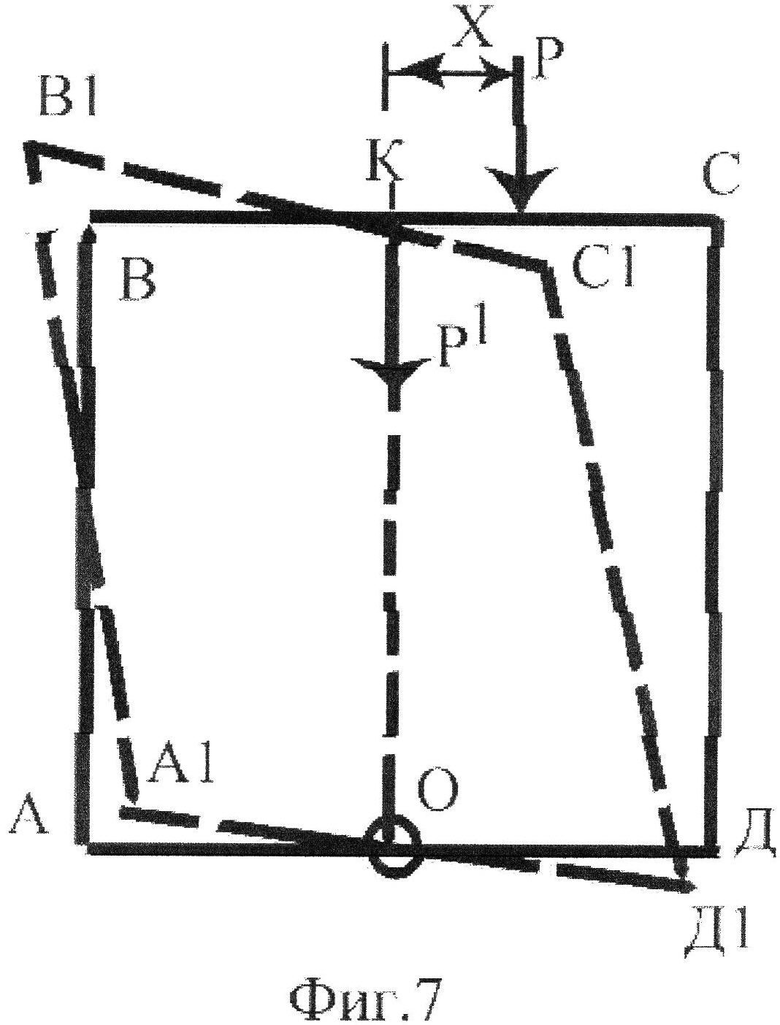
4. Обеспечение устойчивости при смещении X центра масс седока от средней точки шатуна 14 (фиг.7). В этом случае сила Р создает момент относительно шарнира в точке О двуплечего рычага 9, который приводит к повороту двуплечего рычага. Но при этом кривошипы 12 и 13 поворачиваются в противоположном направлении, что приводит к перемещению шатуна 14 в положение, при котором линия действия силы Р проходит через точку О. Величина момента при этом становится равной нулю и устойчивость экипажа сохраняется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| АУТОГРАВИТАЦИОННАЯ КУШЕТКА | 2011 |
|
RU2491901C2 |
| УСТРОЙСТВО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2011 |
|
RU2520756C2 |
| СКУТЕР | 2009 |
|
RU2481999C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Упруго-предохранительная центробежная муфта | 1975 |
|
SU696200A1 |
| Устройство для измерения передаваемого крутящего момента муфты | 1976 |
|
SU591640A1 |
| Привод транспортного средства | 1988 |
|
SU1768436A1 |
| Устройство для измерения крутящегоМОМЕНТА | 1979 |
|
SU838451A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
Изобретение относится к транспортному средству. Транспортное средство содержит раму, установленные в ней на подшипниках два мотор-колеса, седло, джойстик и стабилизирующее устройство. На раме закреплены в горизонтальной плоскости параллельно друг другу три оси, на каждой крайней из которых установлено по мотор-колесу. На средней оси, расположенной посредине между указанными крайними, установлен двуплечий рычаг, образующий вместе с двумя кривошипами и шатуном механизм шарнирного параллелограмма. На плече двуплечего рычага установлены шарнирно зубчатые колеса, образующие зубчатую передачу с положительным передаточным отношением в зацеплении с зубчатым колесом, неподвижно закрепленным на указанной средней оси соосно со средним шарниром двуплечего рычага. Крайнее зубчатое колесо в указанной зубчатой передаче жестко связано с кривошипом, при условии, что в средней точке шатуна закреплено седло. Достигается упрощение конструкции и уменьшение веса. 7 ил.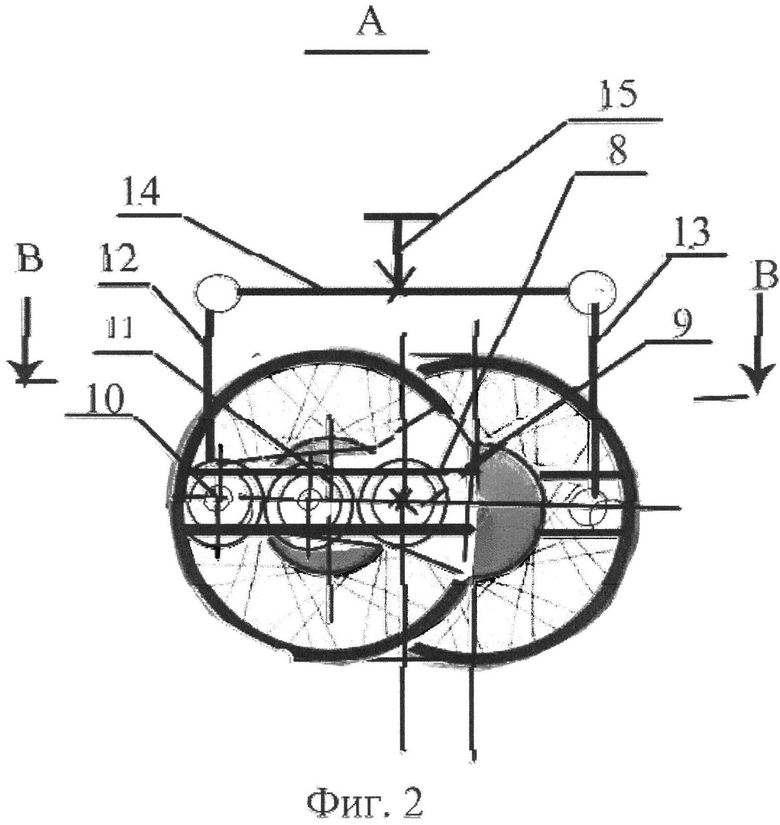
Транспортное средство, содержащее раму, установленные в ней на подшипниках два мотор-колеса, седло, джойстик и стабилизирующее устройство, отличающееся тем, что на раме закреплены в горизонтальной плоскости параллельно друг другу три оси, на каждой крайней из которых установлено по мотор-колесу, а на средней, расположенной посредине между указанными крайними, установлен двуплечий рычаг, образующий вместе с двумя кривошипами и шатуном механизм шарнирного параллелограмма, при условии, что на плече двуплечего рычага установлены шарнирно зубчатые колеса, образующие зубчатую передачу с положительным передаточным отношением в зацеплении с зубчатым колесом, неподвижно закрепленным на указанной средней оси соосно со средним шарниром двуплечего рычага, а крайнее зубчатое колесо в указанной зубчатой передаче жестко связано с кривошипом, при условии, что в средней точке шатуна закреплено седло.
| US 2008105471 A1, 08.05.2008 | |||
| US 2011139520 A1, 16.06.2011 | |||
| US 2012217072 A1, 30.08.2012 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2245267C2 |

