ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству мониторинга давления воздуха в шинах.
УРОВЕНЬ ТЕХНИКИ
Патентный Документ 1 раскрывает технологию для определения позиции колеса передатчика для датчика давления воздуха в шинах, установленного в шине. Каждая шина оснащается датчиком наклона, и угловая позиция сохраняется в качестве угла наклона в ассоциации с позицией колеса. Определение позиции колеса для передатчика в датчике давления в шинах выполняется на основе угла наклона, определенного посредством датчика наклона, и сохраненной привязки между углом наклона и позицией колеса.
ПАТЕНТНЫЙ ДОКУМЕНТ
Не прошедшая экспертизу заявка на патент Японии № 2007-245982.
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Тем не менее, хотя вышеуказанная традиционная технология применяется, когда скорость вращения всех четырех вращающихся шин является идентичной, на практике с учетом того, что скорость вращения для четырех шин может отличаться, в частности, вследствие разности между внутренними и наружными колесами при движении на повороте, либо когда колеса блокируются или проскальзывают и т.д., возникает проблема в том, что позиция колеса передатчика не может быть точно определена.
Задачей настоящего изобретения является создание устройства мониторинга давления воздуха в шинах, допускающего точное определение позиции колеса передатчика.
СРЕДСТВО РЕШЕНИЯ ЗАДАЧ
Чтобы решить вышеописанную задачу, настоящее изобретение накапливает в качестве данных угловой позиции для колес угловую позицию колес, полученную многократно, когда передается беспроводной сигнал, включающий в себя определенную идентификационную информацию; и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика, соответствующего идентификационной информации.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
Если передатчик всегда передает беспроводной сигнал из постоянной угловой позиции, то угловая позиция колеса, к которому присоединяется этот передатчик, составляет практически постоянное значение, в то время как другие угловые позиции варьируются из числа угловых позиций колес, определенных в это время. Соответственно, позиция колеса передатчика может быть точно определена посредством определения, в качестве позиции колеса для передатчика, позиции колеса, соответствующей данным угловой позиции, имеющим наименьшую дисперсию, из числа данных вращения для каждого колеса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 является схемой конфигурации устройства мониторинга давления воздуха в шинах в первом варианте осуществления.
Фиг.2 является схемой конфигурации TPMS-датчика 2.
Фиг.3 является блок-схемой последовательности операций способа, иллюстрирующей процессы передачи TPMS-данных/прекращения передачи TPMS-данных, которые осуществляются в TPMS-датчике в первом варианте осуществления.
Фиг.4 является блок-схемой последовательности операций способа, иллюстрирующей процесс передачи TPMS-данных, который осуществляется в TPMS-датчике в первом варианте осуществления.
Фиг.5 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления выбором режима, который выполняется в TPMSCU в первом варианте осуществления.
Фиг.6 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления выбором режима, который выполняется в TPMSCU в первом варианте осуществления, когда зажигание включено.
Фиг.7 является блок-схемой управления TPMSCU 4, который выполняет управление определением позиций колес.
Фиг.8 является схемой, иллюстрирующей способ для вычисления угловой позиции каждого колеса 1.
Фиг.9 является схемой, иллюстрирующей способ для вычисления значения дисперсионных характеристик.
Фиг.10 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций первого процесса управления определением позиций колес в первом модуле 11 управления.
Фиг.11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций второго процесса управления определением позиций колес во втором модуле 12 управления.
Фиг.12 иллюстрирует взаимосвязь между числом раз, когда принимаются TPMS-данные, и угловой позицией (числом зубьев шестерни ротора) для каждого из колес 1FL, 1FR, 1RL, 1RR, когда TPMS-датчик 2FL в переднем левом колесе 1FL находится в верхней точке.
Фиг.13 иллюстрирует варьирование значения дисперсионной характеристики в соответствии с числом раз, когда принимаются TPMS-данные.
Фиг.14 является примером того, как второе управление определением позиций колес вычисляет значение дисперсионной характеристики.
Фиг.15 является временной диаграммой, иллюстрирующей рабочий режим для режима использования TPMS-датчика и рабочий режим для TPMSCU в ходе движения и остановок в первом варианте осуществления.
Фиг.16 является блок-схемой управления TPMSCU 4 для выполнения управления определением позиций колес во втором варианте осуществления.
Фиг.17 является блок-схемой управления TPMSCU 4 для выполнения управления определением позиций колес в третьем варианте осуществления.
Фиг.18 является схемой конфигурации устройства мониторинга давления воздуха в шинах в четвертом варианте осуществления.
Фиг.19 является блок-схемой управления TPMSCU 4 для выполнения управления определением позиций колес в четвертом варианте осуществления.
Фиг.20 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций второго процесса управления определением позиций колес в четвертом варианте осуществления.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 - колесо
2 - TPMS-датчик
2a - датчик давления (средство определения давления воздуха в шинах)
2b - акселерометр
2c - модуль управления датчика
2d - передатчик
2e - таблеточный аккумуляторный элемент
3 - приемник
4 - TPMSCU (средство определения позиций колес)
4a, 4a', 11a, 12a - модуль вычисления угловых позиций (средство определения угловых позиций)
4b, 4b', 11b, 12b - модуль вычисления дисперсии
4c, 4c', 11c, 12c - модуль определения позиций колес
4d - запоминающее устройство
4e - модуль определения остановки/заднего хода (средство определения конкретного состояния транспортного средства)
4f - модуль коррекции значений счетчика (средство коррекции значений счетчика)
5 - дисплей
6 - модуль ABS-управления (средство вычисления значений счетчика)
7 - шина связи
8 - датчик скорости вращения колес
10 - переключатель режима движения
11 - первый модуль управления (средство определения позиций колес)
12 - второй модуль управления (средство определения позиций колес)
14 - модуль оценки обновления
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее поясняются варианты осуществления настоящего изобретения на основе чертежей с использованием каждого рабочего примера.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг.1 является схемой конфигурации устройства мониторинга давления воздуха в шинах в первом варианте осуществления. На чертеже каждая ссылка с номером снабжается суффиксом FL, чтобы указывать переднее левое колесо, FR - чтобы указывать переднее правое колесо, RL - чтобы указывать заднее левое колесо, и RR - чтобы указывать заднее правое колесо. В нижеприведенном пояснении описания FL, FR, RL, RR опускаются, когда отдельное описание не требуется.
Устройство мониторинга давления воздуха в шинах в первом варианте осуществления содержит датчик 2 системы мониторинга давления в шинах (TPMS), приемник 3, модуль 4 TPMS-управления (TPMSCU), дисплей 5 и датчик 8 скорости вращения колес. Каждое из колес 1 имеет смонтированный TPMS-датчик 2, в то время как приемник 3, TPMSCU 4, дисплей 5 и датчик 8 скорости вращения колес предоставляются на кузове транспортного средства.
TPMS-датчик 2 присоединяется в местоположении воздушного клапана шины (не показано). Фиг.2 является схемой конфигурации TPMS-датчика 2. TPMS-датчик 2 оснащается датчиком 2a давления (средством определения давления воздуха в шинах), акселерометром 2b (G-датчиком), модулем 2c управления датчика (CU датчика), передатчиком 2d и таблеточным аккумуляторным элементом 2e. Датчик 2a давления определяет давление воздуха (кПа) в шине. G-датчик 2b определяет центробежное ускорение (G) шины. Модуль 2c управления датчика управляет электроэнергией, поданной посредством таблеточного аккумуляторного элемента 2e, и передает TPMS-данные, т.е. данные, содержащие информацию давления воздуха в шинах, определенную посредством датчика давления, и идентификационную информацию (идентификатор) датчика, через беспроводные сигналы из передатчика 2d. В первом варианте осуществления, идентификаторы датчиков нумеруются с первого (1) по четвертый (4).
Фиг.3 является блок-схемой последовательности операций способа, иллюстрирующей процессы передачи TPMS-данных/прекращения передачи TPMS-данных, которые осуществляются в TPMS-датчике в первом варианте осуществления. На этапе S21, модуль 2c управления датчика сравнивает центробежное ускорение, определенное посредством G-датчика 2b, с предварительно определенным пороговым значением определения фазы движения; если центробежное ускорение меньше порогового значения определения фазы движения, модуль 2c управления датчика определяет то, что транспортное средство остановлено, и управление переходит к этапу 25, на котором модуль 2c управления датчика оценивает то, меньше или нет предыдущее центробежное ускорение g1 порогового значения g0 определения фазы движения. Когда предыдущее центробежное ускорение g1 превышает или равно пороговому значению g0 определения фазы движения, модуль 2c управления датчика определяет то, что это происходит сразу после того, как центробежное ускорение g1 опускается ниже порогового значения g0 определения фазы движения, и тем самым переходит к этапу S26. Модуль 2c управления датчика передает сигнал деактивации для флага Fm движения один раз для уведомления TPMSCU 4 относительно завершения передачи беспроводных сигналов. Модуль 2c управления датчика переходит к этапу S27 и прекращает передачу TPMS-данных.
Между тем, если центробежное ускорение превышает или равно пороговому значению определения фазы движения на этапе S21, модуль 2c управления датчика определяет то, что транспортное средство движется, и переходит к этапу S22, чтобы оценивать то, меньше или нет предыдущее центробежное ускорение g1 порогового значения g0 определения фазы движения. Когда предыдущее центробежное ускорение g1 меньше порогового значения g0 определения фазы движения, модуль 2c управления датчика определяет то, что это происходит сразу после того, как центробежное ускорение g1 превышает пороговое значение g0 определения фазы движения, и переходит к этапу S23. Модуль 2c управления датчика передает сигнал активации для флага Fm движения один раз для уведомления TPMSCU 4 относительно начала передачи беспроводных сигналов. Модуль 2c управления датчика переходит к этапу 24, выполняет обработку передачи TPMS-данных и передает TPMS-данные в предписанные моменты времени. Приемник 3 принимает и декодирует беспроводные сигналы, выводимые из TPMS-датчиков 2, и выводит декодированные сигналы в TPMSCU 4.
TPMSCU 4 считывает каждые TPMS-данные, обращается к привязкам между каждым идентификатором датчика и каждой позицией колеса, которые сохраняются в энергонезависимом запоминающем устройстве 9 (см. Фиг.7), чтобы определять из идентификатора датчика в указанных TPMS-данных то, какая позиция колеса соответствует считанным TPMS-данным, и отображает давление воздуха в шинах, включенное в TPMS-данные, в качестве давления воздуха для соответствующей позиции колеса. Дополнительно, когда давление воздуха в шинах снижается ниже данного нижнего предела, TPMSCU 4 может изменять цвет отображения, предоставлять отображение в форме мигания или звук оповещения для того, чтобы оповещать водителя в отношении снижения давления воздуха.
Модуль 6 ABS-управления определяет скорость вращения колес каждого колеса 1 на основе импульса скорости вращения колес из каждого датчика 8 скорости вращения колес; если данное колесо стремится к блокировке, модуль 6 ABS-управления управляет ABS-актуатором (не показан) таким образом, чтобы увеличивать, снижать или поддерживать давление в колесном тормозном цилиндре для этого колеса, чтобы тем самым выполнять антиблокировочное управление тормозом. Модуль 6 ABS-управления выводит значение счетчика для импульса скорости вращения колес с предварительно определенными периодами (например, 20 мс) в линию связи по стандарту контроллерной сети (CAN).
Каждый датчик 8 скорости вращения колес является импульсным генератором, который формирует предварительно определенное число z (например, z=48) импульсов скорости вращения колес для одного вращения колеса; датчики 8 скорости вращения колес состоят из ротора в форме шестерни, который синхронизирован и вращается с колесом 1, и постоянного магнита, размещенного напротив внешнего периметра ротора на кузове транспортного средства, и катушки. Когда ротор вращается, зубчатая поверхность ротора пересекает магнитное поле, сформированное вокруг датчика 8 скорости вращения колес, чтобы тем самым изменять магнитный в него этому и формировать электродвижущую силу; это изменение напряжения выводится в модуль 6 ABS-управления в качестве импульсного сигнала скорости транспортного средства.
Вышеуказанным способом TPMSCU 4 определяет то, какому колесу принадлежат данные, принятые в TPMS-данных, на основе привязки между каждым идентификатором датчика и каждой позицией колеса, которая сохраняется в запоминающем устройстве 9; следовательно, когда перестановка шин выполняется в момент, когда транспортное средство остановлено, привязка между каждым идентификатором датчика и каждой позицией колеса больше не совпадает с фактической привязкой, и в таком случае неизвестно, для какого колеса данные соответствуют в TPMS-данных. Здесь, "перестановка шин" означает изменение монтажной позиции шины, чтобы обеспечивать то, что износ протекторов покрышки является равномерным, и повышать срок службы (срок службы протектора) шины. Например, в общем, для пассажирского транспортного средства, позиции правых и левых шин пересекаются, и передние и задние шины переставляются.
Тем не менее, в первом варианте осуществления, с учетом того, что привязка между каждым идентификатором датчика и каждой позицией колеса обновляется и сохраняется в запоминающем устройстве 9 после перестановки шин, если возможно то, что перестановка шин выполнена, частота для передачи TPMS-данных модифицируется в TPMS-датчиках 2, и определение того, какому колесу принадлежат TPMS-датчики 2, выполняется в TPMSCU 4 на основе частоты передачи TPMS-данных и каждого импульса скорости вращения колес.
Режим передачи в постоянной позиции
Если время остановки транспортного средства непосредственно перед тем, как транспортное средство начинает движение, превышает или равно предписанному времени (например, 15 минут), модуль 2c управления датчика в TPMS-датчике 2 определяет то, что возможно то, что перестановка шин осуществлена.
Если время остановки транспортного средства непосредственно перед тем, как транспортное средство начинает движение, меньше предписанного времени, модуль 2c управления датчика работает в "нормальном режиме", в котором TPMS-данные передаются с постоянным интервалом ta (например, с одноминутными интервалами). С другой стороны, если время остановки транспортного средства превышает или равно предписанному времени, модуль 2c управления датчика работает в режиме передачи в постоянной позиции, который имеет интервал (tb) короче интервала передачи для нормального режима, и отправляет TPMS-данные в постоянной угловой позиции.
Модуль 2c управления датчика работает в режиме передачи в постоянной позиции до тех пор, пока число передач TPMS-данных не достигнет предписанного числа раз (например, 40 раз), когда число передач достигает предписанного числа раз, модуль 2c управления датчика переходит в нормальный режим. Если определено то, что транспортное средство остановлено до того, как число передач TPMS-данных достигает предписанного числа раз, когда время остановки транспортного средства меньше предписанного времени (15 минут), модуль 2c управления датчика продолжает работу в режиме передачи в постоянной позиции до тех пор, пока число передач не достигнет предписанного числа раз, и когда время остановки транспортного средства превышает или равно предписанному времени, модуль управления датчика отменяет продолжение режима передачи в постоянной позиции до остановки транспортного средства и инициирует новый режим передачи в постоянной позиции.
Фиг.4 является блок-схемой последовательности операций способа, иллюстрирующей процесс передачи TPMS-данных, который осуществляется в TPMS-датчике в первом варианте осуществления. На этапе S30 определяется, прошло или нет из времени деактивации для флага Fm движения больше предписанного времени (например, 15 минут). Когда прошло больше предварительно определенного времени, определяется то, что можно, перестановка шин осуществлена, и управление переходит к этапу S32; когда прошло меньше предварительно определенного времени, управление переходит к этапу S31, и определяется то, равно или нет число Sn передач нулю. Когда число Sn передач равно нулю, работа в режиме передачи в постоянной позиции не требуется, и, следовательно, управление переходит к этапу S38, и модуль 2c управления датчика работает в нормальном режиме с передачей TPMS-данных с постоянным интервалом ta (например, с одноминутными интервалами).
На этапе S32, модуль 2c управления датчика работает в режиме передачи в постоянной позиции, передавая TPMS-данные с постоянным интервалом tb. На этапе S33, значение для числа Sn передач увеличивается. На этапе S34, определяется то, достигает или нет число Sn передач предписанного числа раз (например, 40 раз). Другими словами, определяется то, удовлетворяется или нет Sn<S0; когда Sn>S0, определяется то, что предписанное число раз достигается, и управление переходит к этапу S39, число Sn передач сбрасывается до нуля, и управление переходит к этапу S38, и модуль 2c управления датчика работает в нормальном режиме. Когда Sn<S0, другими словами, когда определяется то, что предписанное число раз не достигнуто, управление переходит к этапу S35.
На этапе S35, определяется то, деактивирован или нет флаг Fm движения. Если флаг Fm движения деактивирован, управление переходит к этапу S36, а в другие моменты времени управление возвращается к этапу S22 и продолжает увеличивать счетчик числа Sn передач. Другими словами, обработка передачи TPMS-данных инициируется посредством активации флага Fm движения, и после этого, если транспортное средство останавливается в то время, когда модуль 2c управления датчика работает в постоянном режиме передачи, передача TPMS-данных прекращается, и, следовательно, управление выступает в качестве средства мониторинга этого состояния.
На этапе S36, определяется то, превышает или равно либо нет время, в течение которого деактивирован флаг Fm движения, предписанному времени; когда прошло больше или равно предписанного времени, управление переходит к этапу S37, значение для числа передач сбрасывается до нуля, и модуль 2c управления датчика переходит к процессам передачи TPMS-данных/прекращения передачи TPMS-данных. Тем не менее, когда прошло меньше предписанного времени, модуль 2c управления датчика возобновляет передачу данных TMPS и прекращает процесс и еще раз определяет процессы передачи TPMS-данных/прекращения передачи TPMS-данных без сброса счетчика числа передач.
Тем самым, в следующий раз, когда TPMS-данные передаются, и модуль управления датчика 2 находится в режиме передачи в постоянной позиции, если время, когда транспортное средство остановлено, не превышает или равно предписанному времени, другими словами, если перестановка шин не осуществлена, с учетом того, что число Sn передач не сброшено, данные (режима передачи в постоянной позиции), принятые частично через предыдущий режим передачи в постоянной позиции, могут быть использованы. С учетом того, что большое число передач выполняется в течение постоянного временного интервала в режиме передачи в постоянной позиции, существует потенциал для потребления большой величины мощности. Соответственно, когда отсутствует вероятность того, что выполнена перестановка шин, вместо выполнения предписанного числа передач еще раз, использование данных, передаваемых в предыдущем режиме передачи в постоянной позиции, сокращает число передач и тем самым уменьшает потребляемую величину мощности.
В ходе режима передачи в постоянной позиции модуль 2c управления датчика определяет время передачи для TPMS-данных в ходе режима передачи в постоянной позиции на основе компонента гравитационного ускорения центробежного ускорения. Центробежное ускорение TPMS-датчика 2 меняется в зависимости от ускорения и замедления колеса 1, тем не менее, компонент гравитационного ускорения всегда является постоянным. В волновом шаблоне верхняя точка представляется посредством +1(G), нижняя точка представляется посредством -1(G), а позиция в 90 градусов между верхней точкой и нижней точкой представляется посредством нуля. Другими словами, TPMS-датчик определяет угловую позицию посредством мониторинга размера и направления компонента зависимости гравитационного ускорения из центробежного ускорения. Соответственно, например, можно постоянно выводить TPMS-данные в верхней точке посредством вывода TPMS-данных в пике компонента гравитационного ускорения.
Режим автообучения
Если время, которое проходит между выключением и включением зажигания, превышает или равно предписанному времени (например, 15 минут), TPMSCU 4 определяет то, что возможно то, что перестановка шин осуществлена. Если время, которое проходит между выключением и включением переключателя зажигания, меньше предписанного времени, TPMSCU 4 переходит в "режим мониторинга", в котором TPMSCU 4 отслеживает давление воздуха шины на каждом колесе на основе информации давления воздуха в TPMS-данных, передаваемых из каждого из TPMS-датчиков 2. С другой стороны, когда время, которое проходит между выключением и включением переключателя зажигания, превышает или равно предписанному времени, TPMSCU 4 переходит в "режим автообучения", в котором TPMSCU 4 оценивает позицию колеса на предмет каждого из TPMS-датчиков 2. TPMSCU 4 находится в режиме автообучения до тех пор, пока позиция колеса всех TPMS-датчиков 2 не будет оценена, или до тех пор, пока предписанное накопленное время движения (например, восемь минут) не прошло с момента начала режима автообучения. Когда позиция колеса для всех TPMS-датчиков 2 оценена, или когда предписанное накопленное время движения прошло, TPMSCU 4 переходит в режим мониторинга.
Даже в ходе режима автообучения TPMSCU 4 может отслеживать давление воздуха шины из информации давления воздуха, включенной в TPMS-данные; следовательно, в ходе режима автообучения TPMSCU 4 может отображать давление воздуха на основе привязки между каждыми из идентификаторов датчиков и каждыми из позиций колес, в данный момент сохраняемых в запоминающем устройстве 9, и предупреждать пользователя в отношении снижения давления воздуха.
Фиг.5 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления выбором режима, который выполняется в TPMSCU в первом варианте осуществления. Процесс в TPMSCU 4 для выбора режима автообучения или режима мониторинга фундаментально выполняется аналогично процессу определения, который осуществляется в TPMS-датчике 2. Иными словами, TPMS-датчик 2 имеет возможность передавать сигнал, но не может принимать, поскольку информация протекает только в одном направлении. Другими словами, с собственным датчиком 2a давления и акселерометром 2b в качестве вводов, TPMS-датчик 2 передает данные для использования в режиме мониторинга и данные для использования в автоматическом обучающем режиме на основе логики в модуле управления датчика; и, следовательно, TPMSCU 4 должен идентифицировать то, какое состояние информации передается в него.
На этапе S40 определяется, прошло или нет из времени деактивации для флага Fm движения больше предписанного времени (например, 15 минут). Когда прошло больше предварительно определенного времени, определяется то, что можно, перестановка шин осуществлена, и управление переходит к этапу S43; когда прошло меньше предварительно определенного времени, управление переходит к этапу S41, и определяется то, равно или нет число Sn передач нулю. Нет необходимости работать в режиме передачи в постоянной позиции, когда число передач равно нулю, и, следовательно, управлением переходит к этапу S48, на котором режим мониторинга выбирается.
На этапе S43, режим автообучения выбирается. На этапе S44, значение для числа Sn передач увеличивается (на единицу). На этапе S45, определяется то, достигает или нет число Sn приемов предписанного числа раз (например, 40 раз). Другими словами, определяется то, удовлетворяется или нет Sn<S0. Когда Sn>S0, определяется то, что предписанное число раз достигается, и управление переходит к этапу S49, на котором число Sn приемов сбрасывается до нуля, и управление переходит к этапу S42 и выбирает режим мониторинга. Когда Sn<S0, другими словами, когда определяется то, что предписанное число раз не достигнуто, управление переходит к этапу S46. Кроме того, число Sn приемов и множество данных, принимаемых в течение этого числа Sn приемов, записываются в энергонезависимое запоминающее устройство, так что они в силу этого сохраняются. Соответственно, даже когда переключатель зажигания выключен, в следующий раз, когда переключатель зажигания включен, сохраненные данные могут быть эффективно использованы без сброса данных.
На этапе S46, определяется то, деактивирован или нет флаг Fm движения. Если флаг Fm движения деактивирован, управление переходит к этапу S47, а в другие моменты времени управление возвращается к этапу S43 и продолжает увеличивать счетчик числа Sn приемов. Другими словами, обработка передачи TPMS-данных инициируется посредством активации флага Fm движения, и после этого, если транспортное средство останавливается в то время, когда модуль 2c управления датчика работает в постоянном режиме передачи, передача TPMS-данных прекращается, и, следовательно, управление выступает в качестве средства мониторинга этого состояния.
На этапе S46, определяется то, превышает или равно либо нет время, в течение которого деактивирован флаг Fm движения, предписанному времени. Когда прошло больше или равно предписанного времени, управление переходит к этапу S47, значение для числа приемов сбрасывается до нуля, и последовательность операций управления завершается. Тем не менее, когда прошло меньше предписанного времени, последовательность операций управления завершается без сброса счетчика числа передач. Кроме того, эта компоновка не ограничена конкретным образом; управление может сразу переходить в режим мониторинга, даже если число Sn приемов не достигает предписанного числа раз, если можно завершать привязку позиции между каждой позицией колеса и TPMS-датчиком 2.
Фиг.6 является блок-схемой последовательности операций способа, иллюстрирующей процесс управления выбором режима, который выполняется в TPMSCU в первом варианте осуществления, когда зажигание включено.
На этапе S50, определяется то, прошло или нет больше или равно предписанного времени с момента, когда флаг Fm движения деактивирован; когда прошло больше или равно предписанного времени, определяется то, что, перестановка шин осуществлена, и управление переходит к этапу S54, на котором новый режим автообучения инициируется. Здесь, новый режим означает, что операции в режиме автообучения выполняются с использованием данных, принимаемых в ходе текущей езды, вообще без использования данных, принимаемых в ходе предыдущей езды. Кроме того, когда флаг Fm движения деактивируется, после этого, даже если зажигание выключается, продолжается только подсчет времени, в течение которого Fm = деактивирован. После того как подсчет завершается после достижения или превышения предписанного времени, нет причины продолжать вести подсчет, и, следовательно, записывается то, что предписанное время прошло, и подсчет завершается.
На этапе S51, определяется то, равно или нет число Sn приемов нулю; когда Sn равно нулю, имеет место то, что определение позиции колеса для каждого из TPMS-датчиков 2 уже завершено, из предыдущей езды в режиме автообучения, поскольку время с момента, когда флаг Fm движения деактивирован, меньше предписанного времени. В это время, TPMS-датчик 2 передает сигналы в нормальном режиме. Соответственно, управление переходит к этапу S52, и TPMSCU 4 также выбирает режим мониторинга.
Между тем, если число приемов является числом, отличным от нуля, управление переходит к этапу S53 и продолжает работу в режиме автообучения, поскольку имеет место то, что в течение предыдущей езды транспортное средство остановлено в момент, когда TPMSCU 4 работает в режиме автообучения. Здесь, продолжение работы в режиме автообучения означает, что операции в режиме автообучения выполняются с использованием данных, принимаемых в ходе предыдущей езды, при использовании данных, принимаемых в ходе текущей езды. За счет этого, можно экономить на числе передач, выполненных в ходе режима передачи в постоянной позиции TPMS-датчика 2, и, следовательно, управлять величиной мощности, потребляемой посредством датчика.
TPMSCU 4 принимает ввод значения счетчика для импульса скорости вращения колес из модуля 6 ABS-управления (ABSCU) через шину 7 CAN-связи и выполняет тип управления определением позиций колес, проиллюстрированный ниже.
Управление определением позиций колес
Фиг.7 является блок-схемой управления TPMSCU 4 для выполнения управления определением позиций колес. TPMSCU 4 содержит первый модуль 11 управления (средство определения позиций колес) для выполнения первого управления определением позиций колес и второй модуль 12 управления (модуль определения позиций колес) для выполнения второго управления определением позиций колес.
Первый модуль управления
Первый модуль 11 управления содержит модуль 11a вычисления угловых позиций (средство определения угловых позиций), модуль 11b вычисления дисперсии и модуль 11c определения позиций колес.
Модуль 11a вычисления угловых позиций принимает ввод декодированных TPMS-данных, выводимых из приемника 3, и значения счетчика для каждого импульса скорости вращения колес, выводимого из модуля 6 ABS-управления через линию 7 CAN-связи, и вычисляет угловую позицию (число зубьев шестерни ротора) для каждого колеса, когда угловая позиция для каждого TPMS-датчика 2 находится в верхней точке. Здесь, "число зубьев шестерни ротора" указывает, какой из зубьев ротора подсчитывается посредством датчика 8 скорости вращения колес, и может быть получено посредством деления значения счетчика для импульса скорости вращения колес на значение счетчика для одного вращения шины. Когда значение счетчика для первых импульсов скорости вращения колес вводится в модуль 11a вычисления угловых позиций после того, как начинается режим автообучения, модуль 11a вычисления угловых позиций делит значение счетчика на число зубьев шестерни, эквивалентное одному вращению, прибавляет единицу (1) к остатку и задает результирующее значение в качестве опорного числа зубьев шестерни. Для второго и последующих раз модуль 11a вычисления угловых позиций определяет число зубьев шестерни на основе числа согласно значению счетчика для импульса скорости вращения колес (текущее значение счетчика минус первое значение счетчика) из опорного числа зубьев шестерни.
Фиг.8 является схемой, иллюстрирующей способ для вычисления угловой позиции каждого колеса 1.
На Фиг.8, t1 является временем, когда значение счетчика для импульса скорости вращения колес вводится; t2 является временем, когда угловая позиция TPMS-датчика 2 находится в верхней точке; t3 является временем, когда TPMS-датчик 2 фактически начинает передачу TPMS-данных; t4 является временем, когда TPMSCU 4 заканчивает прием TPMS-данных; и t5 является временем, когда значение счетчика для импульса скорости вращения колес вводится. В этот момент, когда t1, t4, t5 фактически измеряются (синхронизируются), t3 может быть вычислено посредством вычитания длины данных (заданного значения, к примеру, приблизительно 10 мс) для TPMS-данных из t4, и t2 может быть вычислено посредством вычитания временной задержки для времени передачи (она может быть получена посредством предварительного экспериментирования и т.д.) из t3.
Соответственно, если zt1 является числом шестерен в t1; zt2 является числом шестерен в t2; и zt5 является числом шестерен в t5, то:
(t2-t1)/(t5-t1)=(zt2-zt1)/(zt5-zt1) является истинным; и
zt2-zt1=(zt5-zt1)*(t2-t1)/(t5-t1)
Следовательно, число zt2 шестерен во время t2, когда TPMS-датчик 2 находится в верхней точке в угловой позиции, составляет:
zt2=zt1+(zt5-zt1)*(t2-t1)/(t5-t1)
Модуль 11b вычисления дисперсии, соответственно, сохраняет для каждого идентификатора датчика угловую позицию для каждого из колес 1, вычисленную посредством модуля 11a вычисления угловых позиций в качестве данных угловой позиции, и вычисляет в качестве значения дисперсионной характеристики степень дисперсии для каждых из данных угловой позиции для каждого идентификатора датчика. Вычисление значения дисперсионной характеристики для данного идентификатора датчика может быть выполнено посредством модуля 11a вычисления угловых позиций каждый раз, когда угловая позиция вычисляется. Фиг.9 является схемой, иллюстрирующей способ для вычисления значения дисперсионной характеристики. В первом варианте осуществления, рассмотрим единичный круг (круг, имеющий радиус в единицу) на двумерной плоскости, при этом центр круга находится в начале координат (0,0), и θ (градусы) представляет собой угловую позицию для колес 1 (θ = 360 x число зубьев шестерни ротора/48); угловая позиция колес 1 может быть преобразована в координаты (cosθ, sinθ) на окружности единичного круга. Иными словами, угловая позиция каждого из колес 1 рассматривается в качестве вектора, который начинается в начале координат и завершается в координате (cosθ, sinθ) и имеет длину 1; дополнительно, средний вектор (ave_cosθ, ave_sinθ) получается для векторов, имеющих идентичные данные угловой позиции, и скалярная величина среднего вектора вычисляется в качестве значения X1 дисперсионной характеристики для данных угловой позиции.

Следовательно, если число приемов TPMS-данных из идентичного идентификатора датчика составляет n (n является положительным целым числом), то средний вектор  составляет:
составляет:
(ave_cosθ, ave_sinθ)=((S(cosθ))/n, (S(sinθ))/n),
и значение X дисперсионной характеристики может представляться следующим образом:

Модуль 11с определения позиций колес сравнивает значение X дисперсионной характеристики в позициях вращения идентичного идентификатора датчика, которое вычисляется посредством модуля 11b вычисления дисперсии. Если наибольшее значение для значения X дисперсионной характеристики превышает первое пороговое значение (например, 0,57), и три оставшихся значения X дисперсионной характеристики меньше второго порогового значения (например, 0,37), позиция колеса для данных угловой позиции, соответствующих значению X дисперсионной характеристики с наибольшим значением, а именно, позиция колеса датчика 8 скорости вращения колес, который определяет рассматриваемые данные угловой позиции, определяется в качестве позиции колеса TPMS-датчика 2, соответствующего идентификатору датчика в данных угловой позиции. Это определение выполняется для всех идентификаторов датчиков, чтобы тем самым определять привязку между идентификаторами датчиков и позициями колес.
Второй модуль управления
Второй модуль 12 управления содержит модуль 12a вычисления угловых позиций (средство определения угловых позиций), модуль 12b вычисления дисперсии и модуль 12c определения позиций колес и выполняет нижеописанное второе управление определением позиций колес. Ниже поясняются только компоненты, которые отличаются от модуля 11a вычисления угловых позиций, модуля 11b вычисления дисперсии и модуля 11c определения позиций колес в первом модуле 11 управления. Когда одна поездка задается как период после того, как модуль 12a вычисления угловых позиций принимает сигнал активации для флага движения, и до тех пор, пока модуль 12a вычисления угловых позиций не примет сигнал деактивации, модуль 12a вычисления угловых позиций принимает ввод декодированных TPMS-данных, выводимых из приемника 3 в течение периода от начала до конца одной поездки, и значения счетчика для каждого импульса скорости вращения колес, выводимого из модуля 6 ABS-управления через линию 7 CAN-связи, и вычисляет угловую позицию (число зубьев шестерни ротора) для каждого колеса, когда угловая позиция для каждого TPMS-датчика 2 находится в верхней точке. Когда значение счетчика для первых импульсов скорости вращения колес вводится в модуль 12a вычисления угловых позиций после начала одной поездки, модуль 12a вычисления угловых позиций делит значение счетчика на число зубьев шестерни, эквивалентное одному вращению, прибавляет единицу (1) к остатку и задает результирующее значение в качестве опорного числа зубьев шестерни. Для второго и последующих раз модуль 12a вычисления угловых позиций определяет число зубьев шестерни на основе числа согласно значению счетчика для импульса скорости вращения колес (текущее значение счетчика минус первое значение счетчика) из опорного числа зубьев шестерни. Другими словами, опорное число зубьев шестерни изменяется каждый раз, когда одна поездка начинается.
Модуль 12b вычисления дисперсии, соответственно, сохраняет для каждого идентификатора датчика угловую позицию для каждого из колес 1, вычисленную посредством модуля 12a вычисления угловых позиций в качестве данных угловой позиции, и вычисляет степень дисперсии для каждых из данных угловой позиции для каждого идентификатора датчика в качестве значения Xtrpm дисперсионной характеристики. Значение Xtrpm дисперсионной характеристики вычисляется для каждой поездки. Когда предварительно определенное накопленное время движения прошло в течение одной поездки, этот момент времени обозначается как конечное время для одной поездки. Дополнительно, значение дисперсионной характеристики не вычисляется, если число приемов TPMS-данных в течение одной поездки меньше предварительно определенного значения (например, три раза).
Если предварительно определенное накопленное время движения прошло, модуль 12b вычисления дисперсии вычисляет конечное значение X дисперсионной характеристики на основе значений Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики, вычисленных в расчете на поездку. Конечное значение X дисперсионной характеристики получается посредством умножения значения Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики на весовой коэффициент K1, K2,..., Km (где K1 + K2 +,..., + Km=1). Следовательно,
X = K1 × Xtrp1 + K2 × Xtrp2 +...+ Km × Xtrpm
Весовые коэффициенты K1, K2,..., Km получаются посредством деления числа N1, N2,..., Nn приемов TPMS-данных в течение одной поездки на число N приемов TPMS-данных в течение предварительно определенного накопленного времени движения. Иными словами, весовой коэффициент Km является отношением числа Nn приемов к общему числу N приемов; чем больше число Nn приемов, тем больше значение весового коэффициента. Для поездки менее чем с тремя приемами, когда значение Xtrpm дисперсионной характеристики не вычисляется, TPMS-данные, принятые в течение этого времени, удаляются из TPMS-данных, принятых в течение предварительно определенного накопленного времени движения.
Модуль 12c определения позиций колес сравнивает конечное значение X дисперсионной характеристики в позициях вращения идентичного идентификатора датчика, которое вычислено посредством модуля 12b вычисления дисперсии. Если существует одно наибольшее значение позиции колеса для данных угловой позиции, соответствующих значению Xtrpm дисперсионной характеристики с наибольшим значением, а именно, позиция колеса датчика 8 скорости вращения колес, который определяет рассматриваемые данные угловой позиции, определяется в качестве позиции колеса TPMS-датчика 2, соответствующего идентификатору датчика в рассматриваемых данных угловой позиции. Это определение выполняется для всех идентификаторов датчиков, чтобы тем самым определять привязку между идентификаторами датчиков и позициями колес.
Модуль 14 оценки обновления сохраняет привязку между идентификатором датчика и позицией колеса, определенной посредством первого модуля 11 управления, посредством выполнения обновления запоминающего устройства 9 и сохраняет результаты определения из второго модуля 12 управления посредством выполнения обновления запоминающего устройства запоминающего устройства 9, когда существуют привязки между идентификаторами датчиков и позициями колес, которые первый модуль 11 управления неспособен определять.
Процесс управления определением позиций колес
Фиг.10 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций первого процесса управления определением позиций колес в первом модуле 11 управления, и каждый этап описывается ниже. Нижеприведенное описание поясняет случай датчика, имеющего идентификатор датчика=1; тем не менее, процесс управления определением позиций колес также выполняется параллельно для других идентификаторов датчиков (идентификатор = 2, 3, 4).
На этапе S1 модуль 11a вычисления угловых позиций принимает TPMS-данные для датчика, имеющего идентификатор датчика=1.
На этапе S2 модуль 11a вычисления угловых позиций вычисляет угловую позицию для колес 1.
На этапе S3 модуль 11b вычисления дисперсии вычисляет значение дисперсионной характеристики для данных угловой позиции для колес 1.
На этапе S4 управление определяет то, приняты или нет TPMS-данные для датчика, имеющего идентификатор датчика=1, не меньше предварительно определенного числа раз (например, 10 раз); если "Да", управление переходит к этапу S5, а если "Нет", управление возвращается к этапу S1. На этапе S5, модуль 11c определения позиций колес определяет то, превышает или нет наибольшее значение для значения дисперсионной характеристики первое пороговое значение 0,57, и меньше или нет оставшиеся значения дисперсионной характеристики второго порогового значения 0,37; если "Да", управление переходит к этапу S6, а если "Нет", этап переходит к этапу S7.
На этапе S6 модуль 11c определения позиций колес определяет позицию колеса из данных угловой позиции, которые соответствуют значению дисперсионной характеристики с наибольшим значением, в качестве позиции колеса для идентификатора датчика. На этапе S7 модуль 11c определения позиций колес определяет то, прошло или нет предварительно определенное накопленное время движения (например, восемь минут) с момента начала режима автообучения; если "Нет", управление переходит к этапу 1, а если "Да", управление завершается.
Второй процесс управления определением позиций колес
Фиг.11 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций второго процесса управления определением позиций колес во втором модуле управления колеса. Нижеприведенное описание поясняет случай датчика, имеющего идентификатор датчика = 1; тем не менее, процесс управления определением позиций колес также выполняется параллельно для других идентификаторов датчиков (идентификатор = 2, 3, 4).
На этапе S11 модуль 12a вычисления угловых позиций принимает TPMS-данные для датчика, имеющего идентификатор датчика = 1.
На этапе S12 модуль 12a вычисления угловых позиций вычисляет угловую позицию для колес 1.
На этапе S13 модуль 12b вычисления дисперсии вычисляет значение Xtrpm дисперсионной характеристики для одной поездки для данных угловой позиции для колес 1.
На этапе 14, модуль 12b вычисления дисперсии определяет то, прошло или нет предварительно определенное накопленное время движения (например, восемь минут) с момента начала режима автообучения; если "Да", управление переходит к этапу S15, а если "Нет", управление переходит к этапу S11.
На этапе S15 модуль 12b вычисления дисперсии вычисляет конечное значение X дисперсионной характеристики.
На этапе S16 модуль 12c определения позиций колес определяет то, имеется или нет одно наибольшее значение; если "Да", управление переходит к этапу S17, а если "Нет", управление завершается. Режим автообучения завершается, когда управление завершается.
На этапе S17 модуль 12c определения позиций колес определяет позицию колеса из данных угловой позиции, которые соответствуют значению дисперсионной характеристики с наибольшим значением, в качестве позиции колеса для идентификатора датчика.
Далее описываются операции.
Определение позиций колес с использованием дисперсии данных угловой позиции
Если время остановки транспортного средства, которое превышает или равно 15 минутам, непосредственно перед начальным временем движения, определяется то, что имеется вероятность того, что перестановка шин осуществлена, и TPMS-датчики 2 переходят из нормального режима в режим передачи в постоянной позиции. В режиме передачи в постоянной позиции TPMS-датчики 2 ожидают прохождения 16 секунд с момента предыдущей передачи и передают TPMS-данные, когда угловая позиция находится в верхней точке.
Между тем, TPMSCU 4 переходит из режима мониторинга в режим автообучения, когда не меньше 15 минут прошло от выключения до включения зажигания. В режиме автообучения TPMSCU 4 выполняет первое управление определением позиций колес с использованием первого модуля 11 управления и управление определением позиций колес с использованием второго модуля 12 управления параллельно в качестве управления определением позиций колес.
В течение первого управления определением позиций колес, каждый раз, когда TPMS-данные принимаются из TPMS-датчиков 2, вычисляется угловая позиция (число зубьев шестерни ротора) для колес 1, когда угловая позиция TPMS-датчика 2 находится в верхней точке, например, со времени, когда значение счетчика для импульса скорости вращения колес вводится, или со времени, когда прием TPMS-данных закончен, и т.п. Когда TPMS-данные для идентичного идентификатора датчика принимаются не менее 10 раз, значения X дисперсионной характеристики для данных угловой позиции для идентификатора датчика сравниваются, и если наибольшее значение для значения X дисперсионной характеристики превышает первое пороговое значение 0,57, а три оставшихся значения X дисперсионной характеристики меньше второго порогового значения 0,37, позиция колеса из данных угловой позиции, соответствующих значению X дисперсионной характеристики с наибольшим значением, определяется в качестве позиции колеса для идентификатора датчика.
В течение второго управления определением позиций колес, если колеса 1 вращаются в идентичном направлении, каждый раз, когда TPMS-данные принимаются из TPMS-датчиков 2, вычисляется угловая позиция (число зубьев шестерни ротора) для колес 1, когда угловая позиция TPMS-датчика 2 находится в верхней точке, и дисперсия для данных угловой позиции для одной поездки вычисляется, например, со времени, когда значение счетчика для импульса скорости вращения колес вводится, или со времени, когда прием TPMS-данных закончен, и т.п. Дисперсия для угловой позиции в одной поездке взвешивается в соответствии с числом Nn приемов TPMS-данных из степени дисперсии, полученной для каждой поездки (значения Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики) в течение предварительно определенного накопленного времени движения (для восьми минут), и конечная степень дисперсии (значение X дисперсионной характеристики) вычисляется для колес. Позиция колеса, соответствующая данным угловой позиции, имеющим наименьшую степень дисперсии, определяется в качестве позиции колеса для TPMS-датчика 2.
В то время, когда транспортное средство едет, скорость вращения колес отличается вследствие разности между внутренними и наружными колесами при движении на повороте, а также блокировки или проскальзывания колеса и разностей давления воздуха шины. Кроме того, следует понимать, что даже если транспортное средство едет по прямой линии, скорость вращения отличается между передними колесами 1FL, 1FR и задними колесами 1RL, 1RR и между левыми колесами 1FL, 1RL и правыми колесами 1FR, 1RR вследствие незначительных корректировок при рулении от водителя или разности между левым или правым виражом на дороге и т.д. Другими словами, TPMS-датчик 2 и датчик 8 скорости вращения колес (его зубья ротора) вращаются совместно, и, следовательно, скорость вращения колес относительно разностей движения и выходная частота датчика 8 скорости вращения колес для идентичного колеса всегда синхронизированы (всегда совпадают) с выходной частотой данного TPMS-датчика 2, несмотря на проезжаемое расстояние и состояние движения.
Следовательно, позиция колеса TPMS-датчиков 2 может быть точно определена посредством наблюдения степени дисперсии данных вращения для колес 1 относительно частоты передачи.
Фиг.12 иллюстрирует взаимосвязь между числом раз, когда принимаются TPMS-данные, и угловой позицией (числом зубьев шестерни ротора) для каждого из колес 1FL, 1FR, 1RL, 1RR, когда TPMS-датчик 2FL в переднем левом колесе 1FL находится в верхней точке. Фиг.12(a) представляет датчик 8FL скорости вращения колес для переднего левого колеса 1FL; (b) представляет датчик 8FR скорости вращения колес для переднего правого колеса 1FR; (c) является датчиком 8RL скорости вращения колес для заднего левого колеса 1RL; и (d) представляет датчик 8RR скорости вращения колес для заднего правого колеса 1RR.
Как очевидно из Фиг.12, в то время как существует значительная степень дисперсии между позициями колес (числом зубьев шестерни), полученными из датчиков 8FR, 8RL, 8RR скорости вращения колес на других колесах (переднем правом колесе 1FR, заднем левом колесе 1RL, заднем правом колесе 1RR), степень дисперсии для позиции колеса, полученной из датчика 8FL скорости вращения колес для оцениваемого колеса (переднего левого колеса 1FL), является наименьшей, и выходная частота TPMS-датчика 2FL является практически идентичной выходной частоте датчика 8FL скорости вращения колес.
В некоторых существующих устройствах мониторинга давления воздуха в шинах датчик наклона также предоставлен в TPMS-датчиках, и позиция колеса TPMS-датчиков определена с использованием взаимосвязи между позицией колеса TPMS-датчиков и углом наклона. В этом типе традиционного устройства мониторинга давления воздуха в шинах взаимосвязь соответствия между позицией колеса TPMS-датчиков и углом наклона должна варьироваться вследствие разностей в скорости вращения четырех колес, которые возникают в зависимости от движения, и, следовательно, позиция колеса TPMS-датчиков не может быть точно определена.
Кроме того, в некоторых из других существующих устройств мониторинга давления воздуха в шинах предоставлено идентичное число приемников и TPMS-датчиков, с приемниками, размещенными рядом; позиция колеса TPMS-датчиков определяется на основе интенсивности беспроводного сигнала, который принят. В этом типе традиционного устройства мониторинга давления воздуха в шинах, необходимо рассматривать вывод из датчиков, дисперсию между чувствительностью приемников и эффективностью обвязочной антенны при проектировании компоновки приемников; тем самым рабочие характеристики устройства зависят от приемной среды и схемы размещения. Кроме того, с учетом того, что требуются четыре приемника, возрастают затраты на систему.
В ответ на это устройство мониторинга давления воздуха в шинах согласно первому варианту осуществления допускает идентификацию позиции колеса TPMS-датчиков 2 без использования интенсивности радиоволн и тем самым допускает определение позиции колеса TPMS-датчиков 2 без зависимости от приемной среды или схемы размещения. Кроме того, требуется только один приемник 3, и можно поддерживать затраты на низком уровне.
В первом варианте осуществления TPMS-датчик 2 вычисляет то, что угловая позиция самого TPMS-датчика 2 находится в верхней точке, из компонента гравитационного ускорения центробежного ускорения, определенного посредством G-датчика 2b. В известных устройствах мониторинга давления воздуха в шинах G-датчик 2b используется для определения того, остановлено или движется транспортное средство; следовательно, посредством приспособления известного TPMS-датчика можно исключать затраты, ассоциированные с добавлением нового датчика в TPMS-датчик 2. Кроме того, в первом варианте осуществления TPMSCU 4 вычисляет угловую позицию колес 1 из импульса скорости вращения колес датчика 8 скорости вращения колес. В завершение, большинство транспортных средств обычно оснащается ABS-модулем. С учетом того, что датчик 8 скорости вращения колес является обязательным компонентом ABS-модуля, можно исключать затраты, ассоциированные с добавлением нового датчика в транспортное средство.
Определение дисперсии с использованием значения дисперсионной характеристики
Угловая позиция для колеса представляет собой циклические угловые данные; следовательно, степень дисперсии не может быть получена из общей формулы дисперсии, в которой степень дисперсии задается посредством среднего "квадрата среднеквадратического отклонения".
Здесь, в первом варианте осуществления, модуль 11b вычисления дисперсии преобразует позицию 0 вращения колес 1, полученную из датчиков 8 скорости вращения колес, в координаты (cosθ, sinθ) на окружности единичного круга, когда центр находится в начале координат (0, 0), и при помощи координаты (cosθ, sinθ) в качестве вектора, вычисляет средний вектор (ave_cosθ, ave_sinθ) для векторов, имеющих идентичные данные угловой позиции. Модуль 11b вычисления дисперсии вычисляет скалярную величину среднего вектора в качестве значения X дисперсионной характеристики и тем самым не допускает циклического характера угловой позиции, чтобы вычислять степень дисперсии угловой позиции.
Фиг.13 иллюстрирует варьирование значения дисперсионной характеристики в соответствии с числом раз, когда принимаются TPMS-данные. На Фиг.13, "оцениваемое колесо" представляет значение X дисперсионной характеристики, вычисленное из TPMS-датчика 2, который передает TPMS-данные, и данные угловой позиции из датчика 8 скорости вращения колес идентичного колеса. "Другое колесо" представляет значение X дисперсионной характеристики, вычисленное из TPMS-датчика 2, который передает TPMS-данные, и данные угловой позиции из датчика 8 скорости вращения колес другого колеса 1.
Как проиллюстрировано на Фиг.13, значение X дисперсионной характеристики для оцениваемого колеса достигает единицы по мере того, как число приемов увеличивается для TPMS-данных для идентичного идентификатора датчика, и значение X дисперсионной характеристики для другого колеса достигает нуля. Разность между значением дисперсионной характеристики оцениваемого колеса и значением дисперсионной характеристики другого колеса увеличивается по мере того, как возрастает число приемов.
Соответственно, можно точно определять степень дисперсии данных угловой позиции для колес посредством оценки значения X дисперсионной характеристики.
Прерывистая передача TPMS-данных
TPMS-датчики 2 ожидают прохождения 16 секунд или более с момента предыдущей передачи TPMS-данных и передают TPMS-данные, когда их угловая позиция находится в верхней точке.
В настоящем варианте осуществления, значения X дисперсионной характеристики каждых из данных угловой позиции сравниваются, и позиция колеса определяется; следовательно, для данного TPMS-датчика, который передает TPMS-данные, чтобы создавать разность между оцениваемым колесом (идентичным колесом) и другим колесом (другим колесом), необходимо обеспечивать определенную величину накопленного проезжаемого расстояния.
Здесь, при условии, если TPMS-данные передаются каждый раз, когда угловая позиция в TPMS-данных находится в верхней точке, зачастую затруднительно определять позицию колеса, поскольку не создается разность значения X дисперсионной характеристики для оцениваемого колеса и другого колеса за десять приемов. Соответственно, задание интервала передачи для TPMS-данных равным 16+α секундам в силу этого обеспечивает то, что определенное накопленное проезжаемое расстояние получается до тех пор, пока TPMS-данные не будут приняты 10 или более раз, и, следовательно, получается достаточная разность между значением X дисперсионной характеристики оцениваемого колеса и другого колеса, и за счет этого можно точно определять позицию колеса.
Первое управление определением позиций колес
В первом варианте осуществления два вида управления определением позиций колес, т.е. первое управление определением позиций колес и второе управление определением позиций колес, выполняются параллельно посредством первого модуля 11 управления и второго модуля 12 управления, соответственно, в качестве управления определением позиций колес для определения привязки между идентификаторами датчиков и колесами после перестановки шин. Результаты определения из первого управления определением позиций колес имеют приоритет для идентификатора датчика, для которого позиция колеса определяется посредством первого управления определением позиций колес; в течение первого управления определением позиций колес результаты определения из второго управления определением позиций колес приспосабливаются для идентификатора датчика, для которого позиция колеса не может быть определена с предварительно определенным накопленным временем движения.
В течение первого управления определением позиций колес, когда наибольшее значение превышает первое пороговое значение 0,57 для значений X дисперсионной характеристики, когда TPMS-данные для идентичного идентификатора датчика принимаются не меньше 10 раз, и любое из трех оставшихся значений X дисперсионной характеристики находится в пределах второго порогового значения 0,37, позиция колеса из данных угловой позиции, соответствующих значению X дисперсионной характеристики с наибольшим значением, определяется в качестве позиции колеса для идентификатора датчика.
Другими словами, не просто выбор значения X дисперсионной характеристики, имеющего наибольшее значение, а сравнение наибольшего значения с первым пороговым значением (0,57) раскрывает то, до какой степени данные угловой позиции, имеющие значение дисперсионной характеристики с наибольшим значением X, синхронизируются с выходной частотой TPMS-данных и обеспечивают определенную величину точности определения. Кроме того, сравнение значений дисперсионной характеристики, которые не являются наибольшим значением, со вторым пороговым значением (0,37) тем самым дает возможность верификации того, что существует предварительно определенная разность (0,2) или более между наибольшим значением и другими тремя значениями, и за счет этого повышает точность определения.
Другими словами, определение позиций колес в соответствии с первым управлением определением позиций колес повышает точность в определении степени дисперсии для данных угловой позиции для колес в отличие от второго управления определением позиций колес, которое выбирает наибольшее значение для значения X дисперсионной характеристики. Дополнительно, первое управление определением позиций колес определяет степень дисперсии данных угловой позиции после сбора, по меньшей мере, десяти элементов данных для угловой позиции колес 1; следовательно, точность первого управления определением позиций колес для определения степени дисперсии для данных угловой позиции для колес повышается по сравнению со вторым управлением определением позиций колес, которое позволяет собирать меньше десяти элементов данных для данных угловой позиции.
Кроме того, TPMS-датчик 2 передает TPMS-данные с приблизительно 16-секундными интервалами. Таким образом, когда транспортное средство продолжает движение, после приблизительно двух с половиной минут после начала режима автообучения, приняты, по меньшей мере, 10 элементов данных для данных угловой позиции; поскольку определение степени дисперсии может начинаться в этот момент, в отличие от второго управления определением позиций колес, которое ожидает предварительно определенного накопленного времени движения (восемь минут) до начала определения степени дисперсии, первое управление определением позиций колес позволяет более быстро определять привязку между идентификаторами датчиков и позициями колес.
Второе управление определением позиций колес
В первом варианте осуществления угловая позиция колеса 1 определяется из значения счетчика для импульса скорости вращения колес. Здесь датчик 8 скорости вращения колес является датчиком на основе счетчика импульсов; когда гофрированная поверхность ротора, который вращается с колесом 1, пересекает магнитное поле, сформированное вокруг датчика 8 скорости вращения колес, датчик скорости вращения колес выводит изменение тока, сформированное в катушке вследствие изменения в магнитном потоке, в качестве импульса скорости вращения колес. Следовательно, когда колесо 1 вибрирует вместе с вибрацией транспортного средства, вызываемой посредством переключения передач в момент, когда транспортное средство остановлено, или вызываемой посредством вибрации транспортного средства (т.е. посредством непрерывного покачивания транспортного средства между малыми углами) вследствие руления либо при посадке или высадке пассажира из транспортного средства, значение для импульса скорости вращения колес может увеличиваться вследствие вибрации, хотя колесо фактически не вращается.
В этом случае, возникает отклонение между угловой позицией для колеса, вычисленной с использованием числа согласно значению счетчика для импульса скорости вращения колес из опорного числа зубьев, и фактической угловой позицией; снижается точность для определения степени дисперсии в данных угловой позиции вследствие ошибочного определения угловой позиции, и в силу этого привязки между идентификаторами датчиков и позицией колеса не могут быть точно определены. Кроме того, даже когда транспортное средство дает задний ход (сдвигается с места) вследствие начала движения на подъеме или стоянки на бордюре, вышеуказанные проблемы возникают, поскольку значение для импульса скорости вращения колес может увеличиваться, хотя колесо 1 фактически вращается в режиме заднего хода.
В первом управлении определением позиций колес импульс скорости транспортного средства, вычисленный в момент, когда транспортное средство остановлено, также включает в себя число согласно значению счетчика и угловую позицию (число зубьев шестерни) колеса 1; следовательно, если существует некоторое отклонение в вышеуказанной угловой позиции, когда транспортное средство остановлено и т.д. в ходе режима автообучения, разности между значениями X дисперсионной характеристики зачастую не возникают вследствие ошибочного определения угловой позиции, и становится затруднительным определять позицию колеса.
Здесь, TPMS-датчик 2 ограничивается передачей TPMS-данных 40 раз в ходе режима передачи в постоянной позиции, чтобы увеличивать срок службы таблеточного аккумуляторного элемента 2e, и, следовательно, первое управление определением позиций колес не может продолжаться до тех пор, пока позиция колеса не будет определена для всех идентификаторов датчиков.
Соответственно, в первом варианте осуществления, если в течение первого управления определением позиций колес существуют идентификаторы датчиков, для которых позиция колеса не может быть определена даже после того, как предварительно определенное накопленное время движения (восемь минут) прошло, колесо для этого идентификатора датчика окончательно просчитывается с использованием результатов определения из второго управления определением позиций колес.
В течение второго управления определением позиций колес выбирается наибольшее значение для значений дисперсионной характеристики после того, как предварительно определенное накопленное время движения прошло, и позиция колеса для идентификатора датчика определена. В это время, нечасто имеется более двух или наибольших значений, поэтому, позиция колеса для всех идентификаторов датчиков может быть определена.
Кроме того, в течение второго управления определением позиций колес одна поездка задается как период, в течение которого колеса вращаются в идентичном направлении. Значение Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики вычисляется для одной поездки на основе данных угловой позиции, полученных в течение одной поездки; и конечное значение X дисперсионной характеристики вычисляется на основе значений Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики. Следовательно, влияние отклонения между числом согласно значению счетчика для импульсов скорости вращения колес, которые формируются, когда транспортное средство остановлено или находится в режиме заднего хода, и фактической скоростью вращения колеса 1 может исключаться, а дисперсионные значения X вычисляться, чтобы повышать точность определения степени дисперсии между угловыми позициями.
В течение второго управления определением позиций колес значения Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики взвешиваются посредством умножения значений Xtrp1, Xtrp2,..., Xtrpm дисперсионной характеристики на весовой коэффициент K1, K2,..., Km, который является отношением числа Nn приемов TPMS-данных в течение одной поездки к общему числу N приемов TPMS-данных в течение предварительно определенного накопленного времени движения; конечное значение X дисперсионной характеристики является суммой (K1 × Xtrp1 + K2 × Xtrp2 +...+ Km × Xtrpm) поствзвешенных значений K1 × Xtrp1, K2 × Xtrp2,..., Km × Xtrpm дисперсионной характеристики.
Фиг.14 является примером того, как второе управление определением позиций колес вычисляет значение дисперсионной характеристики. Допустим, что на Фиг.14, предварительно определенное накопленное время движения (восемь минут) прошло во время третьей поездки; значение Xtrp1 дисперсионной характеристики для первой поездки составляет 0,8; значение Xtrp2 дисперсионной характеристики для второй поездки составляет 0,9; и значение Xtrp3 дисперсионной характеристики для первой поездки составляет 0,4.
В этот момент, число Nn приемов TPMS-данных во время каждой поездки (т.е. число элементов данных для угловой позиции) равняется четырем, девяти и трем для первой-третьей поездок, соответственно. Следовательно, весовые коэффициенты составляют K1 = 4/16, K2 = 9/16 и K3 = 3/16 для первой-третьей поездок, соответственно. Соответственно, конечное значение X дисперсионной характеристики составляет:
X = 4/16 × 0,8 + 9/16 × 0,9 + 3/16 × 0,4
= 0,2 + 0,506 + 0,075
= 0,781
При сравнении значения Xtrp1, Xtrp3 дисперсионной характеристики для первой и третьей поездки, значение для числа Nn приемов TPMS-данных является ближайшим к значению Xtrp2 дисперсионной характеристики для второй поездки.
Другими словами, чем больше элементов данных для угловой позиции получается, тем больше точность значения Xtrpm дисперсионной характеристики для одной поездки; следовательно, увеличение весового коэффициента для значения Xtrpm дисперсионной характеристики, имеющего большое число элементов данных, в силу этого повышает надежность конечного значения X дисперсионной характеристики.
Если число Nn приемов TPMS-данных в пределах одной поездки меньше трех в течение второго управления определением позиций колес без вычисления этого значения Xtrpm дисперсионной характеристики, конечное значение X дисперсионной характеристики вычисляется на основе значения Xtrpm дисперсионной характеристики для поездки, в которой число Nn приемов TPMS-данных в одной поездке не меньше трех. Варьирования значения Xtrpm дисперсионной характеристики практически никогда не возникают для колес 1, когда существует небольшое число Nn приемов TPMS-данных в одной поездке. Другими словами, если число элементов данных является небольшим, эффективное значение Xtrpm дисперсионной характеристики не может быть получено для определения степени дисперсии между угловыми позициями колес, и, следовательно, исключение этого неэффективного значения из конечного значения X дисперсионной характеристики тем самым повышает надежность конечного значения X дисперсионной характеристики.
Далее описываются операции в TPMS-датчике и TPMSCU. Фиг.15 является временной диаграммой, иллюстрирующей рабочий режим для режима использования TPMS-датчика и рабочий режим для TPMSCU в ходе движения и остановок в первом варианте осуществления. В начальном состоянии на временной диаграмме транспортное средство остановлено в течение не менее предварительно определенного времени, флаг Fm движения деактивирован, TPMS-датчик выбирает режим передачи в постоянной позиции, и TPMSCU выбирает режим автообучения.
Когда транспортное средство начинает движение, если в течение времени t1 центробежное ускорение превышает пороговое значение g0 определения фазы движения, флаг Fm движения активируется, и TPMS-датчик 2 передает данные с интервалами tb. В это время TPMSCU 4 находится также в режиме автообучения и идентифицирует позицию колеса на основе принимаемых данных.
В течение времени t2, когда транспортное средство замедляется, и центробежное ускорение опускается ниже порогового значения g0 определения фазы движения, флаг Fm движения деактивируется. Тем не менее, с учетом того, что предварительно определенное время или более еще не прошло, TPMS-датчик 2 остается заданным режиму передачи в постоянной позиции, и TPMSCU 4 остается заданным режиму автообучения. В это время число передач или число приемов сохраняется вместе с данными. Теоретически, даже если в этот время переключатель зажигания выключается, принимаемые данные, подсчитанные в течение этого числа передач, или это число Sn приемов записываются в энергонезависимое запоминающее устройство и сохраняются.
В течение времени t3, когда транспортное средство снова начинает движение, и центробежное ускорение превышает пороговое значение g0 определения фазы движения, флаг движения активируется, и TPMS-датчик 2 повторно начинает передачу данных. К этому времени передаваемые данные, выводимые в ходе режима передачи в постоянной позиции вплоть до предыдущего времени, могут быть эффективно использованы, и, следовательно, данные, передаваемые посредством TPMS-датчика 2, также отправляются в качестве ранее передаваемого следующего значения. Тем самым данные могут быть эффективно использованы независимо от того, включен или выключен переключатель зажигания, и можно управлять величиной мощности, потребляемой посредством TPMS-датчика 2.
В течение времени t4, когда число Sn передач достигает предварительно определенного числа, число Sn передач сбрасывается до нуля. TPMS-датчик 2 переходит в нормальный режим, в то время как TPMSCU 4 переходит в режим мониторинга. Тем самым TPMS-датчик 2 передает данные в интервале ta.
В течение времени t5, когда транспортное средство замедляется, и центробежное ускорение еще раз опускается ниже порогового значения g0 определения фазы движения, флаг Fm движения деактивируется. Тем не менее, с учетом того, что предварительно определенное время или более еще не прошло, TPMS-датчик 2 остается заданным режиму передачи в постоянной позиции, и TPMSCU 4 остается заданным режиму мониторинга. В течение времени t6, когда транспортное средство снова начинает движение, и центробежное ускорение превышает пороговое значение g0 определения фазы движения, флаг движения активируется, и TPMS-датчик 2 повторно начинает передачу данных. К этому времени предварительно определенное время не прошло, поскольку флаг Fm движения деактивирован, следовательно, передача данных осуществляется в нормальном режиме.
Ниже описываются преимущества.
Устройство мониторинга давления воздуха в шинах из первого варианта осуществления демонстрирует следующие преимущества.
(1) Устройство мониторинга давления воздуха в шинах, предоставленное для мониторинга давления воздуха в шинах, содержит датчик 2a давления, установленный в шине каждого из колес 1, для определения давления воздуха в шине; передатчик 2d, предоставленный на каждом из колес 1, для передачи посредством беспроводных сигналов информации давления воздуха вместе с идентификатором датчика в предварительно определенной угловой позиции; приемник 3, предоставленный на кузове транспортного средства, для приема беспроводных сигналов; модуль 11a, 12a вычисления угловых позиций, предоставленный на кузове транспортного средства таким образом, что он соответствует каждому из колес 1, для определения угловой позиции колеса 1; и средство определения позиций колес для получения угловой позиции колес многократно, когда передается беспроводной сигнал, содержащий определенный идентификатор датчика, ее накопления в качестве данных угловой позиции для колес 1 и определения позиции колеса, соответствующего данным угловой позиции, имеющим наименьшую степень дисперсии из числа каждых из данных угловой позиции, в качестве позиции колеса для передатчика 2d, соответствующего идентификатору датчика. Тем самым позиция колеса TPMS-датчиков 2 может быть точно определена.
(2) Средство определения позиций колес содержит первый модуль 11 управления, который до того, как накопленное время движения транспортного средства достигает предварительно определенного накопленного времени движения (восемь минут), вычисляет степень дисперсии данных позиции колеса, когда число элементов данных для данных угловой позиции достигает или превышает предварительно определенное число (десять), вычисляет степень дисперсии между данными позиции колеса и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика 2d, соответствующего идентификатору датчика; и второй модуль 12 управления, который, когда накопленное время движения транспортного средства достигает предварительно определенного накопленного времени движения (восемь минут), вычисляет степень дисперсии между данными позиции колеса и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика 2d, соответствующего идентификатору датчика.
Тем самым первый модуль 11 управления получает степень дисперсии между данными угловой позиции с использованием предварительно определенного числа элементов данных угловой позиции, когда транспортное средство продолжает движение в этой степени, и, следовательно, первый модуль 11 управления допускает точное определение угловой позиции TPMS-датчиков 2. С другой стороны, второй модуль 12 управления получает степени дисперсии между данными угловой позиции, когда накопленное время движения для транспортного средства достигает предварительно определенного времени движения, и, следовательно, второй модуль 12 управления допускает надежное определение угловой позиции TPMS-датчиков 2 даже в случае, если транспортное средство не движется вследствие дорожной пробки и т.п.
(3) Первый модуль 11 управления и второй модуль 12 управления преобразуют угловую позицию каждого из колес 1 в вектор с начальной точкой в начале координат двумерной плоскости и конечной точкой в точке (cosθ, sinθ) на окружности единичного круга; вычисляют скалярную величину среднего вектора (ave_cosθ, ave_sinθ) векторов для данных угловой позиции в качестве значения X дисперсионной характеристики; и сравнивают значения X дисперсионной характеристики, чтобы получать степень дисперсии между данными угловой позиции.
За счет этого можно не допускать циклического характера данных угловой позиции и вычислять степень дисперсии угловой позиции.
(4) Первый модуль 11 управления определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, когда наибольшее значение из значений X дисперсионной характеристики превышает первое пороговое значение 0,57.
В силу этого можно обеспечивать определенную величину точности определения.
(5) Первый модуль 11 управления определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, когда, за исключением значения дисперсионной характеристики, имеющего наибольшее значение, все значения X дисперсионной характеристики ниже второго порогового значения 0,37, которое меньше первого порогового значения 0,57.
В силу этого можно повышать точность определения.
(6) Для каждого периода (одна поездка), когда колеса движутся в идентичном направлении в течение предварительно определенного накопленного времени движения, второй модуль 12 управления вычисляет значение Xtrpm дисперсионной характеристики между данными угловой позиции для отдельного периода на основе данных угловой позиции, полученных в течение упомянутого периода, и вычисляет общее значение X дисперсионной характеристики между данными угловой позиции на основе значения Xtrpm дисперсионной характеристики для отдельных периодов и в завершение определяет данные угловой позиции, соответствующие наибольшему общему значению X дисперсионной характеристики из общих значений дисперсионной характеристики, как имеющие наименьшую степень дисперсии.
За счет этого можно подавлять ошибочное определение угловой позиции вследствие вибраций колеса в момент, когда транспортное средство остановлено, или когда транспортное средство находится в режиме заднего хода, и в силу этого можно точно определять позицию колеса TPMS-датчиков 2.
(7) Передатчик 2d содержит этап S30 управления (средство переключения режима) для переключения передатчика 2d между режимом передачи в постоянной позиции, в котором передатчик 2d передает в интервале tb (первом интервале), когда первое предварительно определенное условие является истинным, и во все остальные времена переключения на нормальный режим, в котором передатчик 2d передает в интервале ta (втором интервале), который превышает интервал tb. Приемник 3 содержит модуль (модуль определения режима) для определения рабочего режима передатчика 2d с использованием этапа S40 управления, на котором выполняются оценки, идентичные оценкам на этапе 30 управления в передатчике 2d.
А именно, передатчик 2d содержит режимы передачи, имеющие различные интервалы, чтобы тем самым управлять величиной мощности, потребляемой посредством передатчика 2d. Кроме того, приемник имеет возможность всегда определять режим передатчика 2d даже без функции связи; и можно точно определять позицию колеса.
(8) Первое предварительно определенное условие является истинным, когда предварительно определенное время или более прошло в то время, когда флаг Fm движения деактивирован (состояние, в котором сигналы не передаются из передатчика 2d); или до того, как предварительно определенное время или более прошло, и до того, как число Sn передач, передаваемое в интервале tb, достигает предварительно определенного числа. Приемник 3 выполнен с возможностью сохранять число Sn приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними, и TPMSCU 4 (средство определения позиций колес) выполнен с возможностью определять позицию колеса на основе сохраненных данных и новых принимаемых данных.
Когда предварительно определенное время или более прошло, имеется вероятность того, что перестановка шин выполнена, и, следовательно, передатчик 2d переключается на режим передачи в постоянной позиции. В это время, передачи отправляются с меньшим интервалом tb, что обусловливает тенденцию потреблять мощность. Следовательно, даже если, когда устройство переключается на режим передачи в постоянной позиции, вращение колес на мгновение частично прекращается, и передача данных прекращается, при условии, что устройство работает в режиме передачи в постоянной позиции посредством передачи данных после данных, ранее переданных в режиме передачи в постоянной позиции, можно уменьшать число передач данных и тем самым управлять величиной мощности, потребляемой посредством передатчика 2d. Дополнительно, TPMSCU 4 выполнен с возможностью определять позицию колеса на основе как ранее принимаемых данных, так и новых принимаемых данных, и, следовательно, исключает риск несоответствия в определении.
(9) Приемник продолжает выполнять процесс управления выбором режима и процесс выбора режима автообучения (модуль определения режима) до тех пор, пока предварительно определенное время не прошло, независимо от состояния переключателя зажигания.
Следовательно, даже если транспортное средство начинает движение, и транспортное средство останавливается в ходе работы в режиме автообучения, и переключатель зажигания выключается, не возникает отклонения между определением режима в передатчике 2d и определением, выполняемым в приемнике. Соответственно, когда переключатель зажигания снова включается в течение предварительно определенного времени, и движение начинается, данные, уже переданные посредством передатчика 2d, и новые передаваемые данные эффективно используются в приемнике 3, и можно управлять величиной мощности, потребляемой посредством передатчика 2d.
Второй вариант осуществления изобретения
Фиг.16 является блок-схемой управления TPMSCU 4, который выполняет управление определением позиций колес из второго варианта осуществления. TPMSCU 4 (средство определения позиций колес) содержит модуль 4a вычисления угловых позиций, модуль 4b вычисления дисперсии, модуль 4c определения позиций колес и запоминающее устройство 4d. Модуль 4a вычисления угловых позиций, модуль 4b вычисления дисперсии, модуль 4c определения позиций колес имеют процессы, идентичные процессам модуля 11a вычисления угловых позиций, модуля 11b вычисления дисперсии, модуля 11c определения позиций колес из первого варианта осуществления, проиллюстрированного на Фиг.7. Помимо этого во втором варианте осуществления, модуль 4c определения позиций колес сохраняет привязку между идентификаторами датчиков и позициями колес через обновление запоминающего устройства 4d.
Процесс управления определением позиций колес
Последовательность операций процесса управления определением позиций колес из второго варианта осуществления является идентичной последовательности операций первого процесса управления определением позиций колес из первого варианта осуществления, проиллюстрированного на Фиг.10, и как следствие, чертежи и описания здесь не включаются.
Следовательно, за исключением второй операции управления определением позиций колес, операции, описанные в первом варианте осуществления, могут быть реализованы во втором варианте осуществления.
Ниже описываются преимущества.
Устройство мониторинга давления воздуха в шинах из второго варианта осуществления демонстрирует следующие преимущества в дополнение к преимуществам (1) и (7)-(9), описанным для первого варианта осуществления.
(10) TPMSCU 4 преобразует угловую позицию каждого из колес 1 в вектор с начальной точкой в начале координат двумерной плоскости и конечной точкой в точке (cosθ, sinθ) на окружности единичного круга; вычисляет скалярную величину среднего вектора (ave_cosθ, ave_sinθ) векторов для данных угловой позиции в качестве значения X дисперсионной характеристики; определяет наибольшее значение из значений X дисперсионной характеристики, имеющих наименьшую степень дисперсии.
За счет этого можно не допускать циклического характера и вычислять степень дисперсии угловой позиции.
(11) Когда наибольшее значение из значений X дисперсионной характеристики превышает первое пороговое значение 0,57, TPMSCU 4 определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии.
В силу этого можно обеспечивать определенную величину точности определения.
(12) При исключении значения дисперсионной характеристики, имеющего наибольшее значение, когда значения X дисперсионной характеристики ниже второго порогового значения 0,37, которое меньше первого порогового значения 0,57, TPMSCU 4 определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии.
В силу этого можно повышать точность определения.
Третий вариант осуществления изобретения
Фиг.17 является блок-схемой управления TPMSCU 4, который выполняет управление определением позиций колес из третьего варианта осуществления. TPMSCU 4 (средство определения позиций колес) содержит модуль 4a' вычисления угловых позиций, модуль 4b' вычисления дисперсии, модуль 4c' определения позиций колес и запоминающее устройство 4d.
Модуль 4a' вычисления угловых позиций, модуль 4b' вычисления дисперсии, модуль 4c' определения позиций колес имеют процессы, идентичные процессам модуля 12a вычисления угловых позиций, модуля 12b вычисления дисперсии, модуля 12c определения позиций колес из первого варианта осуществления, проиллюстрированного на Фиг.7. Помимо этого, в третьем варианте осуществления, модуль 4c' определения позиций колес сохраняет привязку между идентификаторами датчиков и позициями колес через обновление запоминающего устройства 4d.
Процесс управления определением позиций колес
Последовательность операций процесса управления определением позиций колес из третьего варианта осуществления является идентичной последовательности операций второго процесса управления определением позиций колес из первого варианта осуществления, проиллюстрированного на Фиг.11, и как следствие, чертежи и описания здесь не включаются.
Следовательно, за исключением первой операции управления определением позиций колес, операции, описанные в первом варианте осуществления, могут быть реализованы в третьем варианте осуществления.
Ниже описываются преимущества.
Устройство мониторинга давления воздуха в шинах из третьего варианта осуществления демонстрирует следующие преимущества в дополнение к преимуществам (1) и (7)-(9), описанным для первого варианта осуществления.
(13) TPMSCU 4 накапливает в качестве данных угловой позиции для колес 1 угловую позицию колес 1, полученную многократно, когда передается беспроводной сигнал, включающий в себя определенный идентификатор датчика, в течение периода, когда колеса 1 вращаются в идентичном направлении; и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика 2d, соответствующего идентификатору датчика.
За счет этого можно подавлять ошибочное определение угловой позиции вследствие вибраций колеса в момент, когда транспортное средство остановлено, или когда транспортное средство находится в режиме заднего хода, и в силу этого можно точно определять позицию колеса TPMS-датчиков 2.
(14) TPMSCU 4 вычисляет степень дисперсии (Xtrp1, Xtrp2, ..., Xtrpm) между данными угловой позиции в течение множества периодов, когда колеса 1 вращаются в идентичном направлении вплоть до тех пор, пока накопленное время движения для транспортного средства не достигнет предварительно определенного времени (восемь минут); и вычисляет конечную степень дисперсии (конечное значение X дисперсионной характеристики) на основе степени дисперсии для каждого из периодов.
Это тем самым упрощает определение степени дисперсии для угловой позиции для колес 1.
(15) TPMSCU 4 взвешивает степень дисперсии для каждого из периодов посредством назначения большего весового коэффициента угловой позиции с большим числом элементов данных и вычисляет конечную степень дисперсии на основе взвешенной степени дисперсии для каждого из периодов.
Это тем самым повышает надежность конечной степени дисперсии.
(16) Из множества периодов TPMSCU 4 вычисляет конечную степень дисперсии на основе степени дисперсии для периодов, имеющих предварительно определенное число (три раза) или более элементов данных для угловой позиции.
Это тем самым повышает надежность конечной степени дисперсии.
Четвертый вариант осуществления изобретения
Фиг.18 является схемой конфигурации устройства мониторинга давления воздуха в шинах в четвертом варианте осуществления. Четвертый вариант осуществления содержит переключатель 10 режима движения (SW режима движения) в дополнение к конфигурации, проиллюстрированной на Фиг.1 для первого варианта осуществления.
Управление определением позиций колес
Фиг.19 является блок-схемой управления TPMSCU 4, который выполняет управление определением позиций колес из четвертого варианта осуществления. Наряду с конфигурацией первого варианта осуществления, проиллюстрированной на Фиг.7, TPMSCU 4 (средство определения позиций колес) содержит модуль 4e определения остановки/заднего хода (средство определения конкретного состояния транспортного средства) и модуль 4f коррекции значений счетчика (средство коррекции значений счетчика).
Когда сигнал диапазона трансмиссии из переключателя 10 режима движения соответствует парковочному диапазону трансмиссии (P), или когда все из значений счетчика для импульса скорости вращения колес не подсчитаны (счетчик увеличен) в течение предварительно определенного времени (например, 400 мс) или более, модуль 4e определения остановки/заднего хода определяет то, что транспортное средство остановлено, и выводит сигнал определения остановки транспортного средства в модуль 4f коррекции значений счетчика. Дополнительно, когда сигнал диапазона трансмиссии из переключателя режима движения соответствует диапазону заднего хода трансмиссии (R), модуль 4e определения остановки/заднего хода определяет то, что транспортное средство находится в режиме заднего хода, и выводит сигнал заднего хода транспортного средства в модуль 4f коррекции значений счетчика.
Если модуль 4e определения остановки/заднего хода определяет то, что транспортное средство остановлено, модуль 4f коррекции значений счетчика выводит скорректированное значение счетчика в модуль 4a вычисления угловых позиций, при этом скорректированное значение счетчика является результатом вычитания числа согласно значению счетчика в момент, когда транспортное средство остановлено, из значений счетчика импульсов скорости вращения колес транспортного средства, выводимых из модуля 6 ABS-управления (средства вычисления значений счетчика). Если модуль 4e определения остановки/заднего хода определяет то, что транспортное средство находится в режиме заднего хода, модуль 4f коррекции значений счетчика выводит скорректированное значение счетчика в модуль 4a вычисления угловых позиций, при этом скорректированное значение счетчика является результатом вычитания числа, которое в два раза превышает число согласно значению счетчика, в то время как транспортное средство находится в режиме заднего хода, из значений счетчика импульсов скорости вращения колес транспортного средства, выводимых из модуля 6 ABS-управления. В завершение, если ни остановка транспортного средства, ни задний ход транспортного средства не определены, то значение счетчика, выводимое из модуля 6 ABS-управления, выводится без изменения в модуль 4a вычисления угловых позиций.
Процесс управления определением позиций колес
Фиг.20 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления определением позиций колес в четвертом варианте осуществления. Каждый этап в этой последовательности операций описывается ниже. Тем не менее, при том, что этапам, имеющим обработку, идентичную обработке первого процесса управления определением позиций колес из первого варианта осуществления, проиллюстрированного на Фиг.10, присвоены идентичные номера этапов, идентичные описания не повторяются здесь.
На этапе S11 модуль 4a вычисления угловых позиций принимает TPMS-данные из датчика, имеющего идентификатор датчика=1, в то время как значение счетчика для импульсов скорости вращения колес вводится в модуль 4e определения остановки/заднего хода.
На этапе S12 модуль 4e определения остановки/заднего хода определяет то, что транспортное средство остановлено или находится в режиме заднего хода либо нет, в то время как модуль коррекции значений счетчика определяет то, определяет или нет модуль 4e определения остановки/заднего хода остановку транспортного средства или задний ход транспортного средства; если "Да", управление переходит к этапу S13, а если "Нет", управление переходит к этапу S2.
На этапе S13 модуль коррекции значений счетчика корректирует значение счетчика. Если модуль 4e определения остановки/заднего хода определяет остановку транспортного средства, модуль коррекции значений счетчика вычитает число согласно значению счетчика в течение периода прекращения транспортного средства из значения счетчика, выводимого из модуля 6 ABS-управления. С другой стороны, если модуль 4e определения остановки/заднего хода определяет задний ход транспортного средства, модуль коррекции значений счетчика вычитает умноженное на два число согласно значению счетчика в течение периода заднего хода транспортного средства из значения счетчика, выводимого из модуля 6 ABS-управления.
Далее описываются операции.
Как описано в первом варианте осуществления, в ходе режима автообучения, когда транспортное средство останавливается, колесо 1 должно вибрировать вместе с вибрацией транспортного средства, вызываемой посредством переключения передач в момент, когда транспортное средство остановлено, или вызываемой посредством руления либо при посадке или высадке пассажира из транспортного средства, и за счет этого значение для импульса скорости вращения колес может увеличиваться вследствие вибрации, хотя колесо фактически не вращается. Кроме того, если транспортное средство дает задний ход в ходе режима автообучения, значение для импульса скорости вращения колес увеличивается, хотя колеса вращаются в режиме заднего хода.
TPMSCU 4 использует тот факт, что существует постоянная взаимосвязь между угловой позицией идентичного колеса и значением счетчика для импульса скорости вращения колес, чтобы вычислять степень дисперсии для угловой позиции. С учетом того, что позиция колеса определяется, если существует отклонение во взаимосвязи между угловой позицией и значением счетчика для импульса скорости вращения колес от взаимосвязи (предварительно определенной взаимосвязи), когда TPMSCU 4 задает опорное число зубьев шестерни, это снижает точность при вычислении степени дисперсии в данных угловой позиции, так что TPMSCU 4 неспособен точно определять привязку между идентификаторами датчиков и позицией колеса, что потенциально может вызывать задержку в процессе определения позиций колес.
С учетом этого, TPMSCU в четвертом варианте осуществления определяет то, остановлено или нет транспортное средство, и если определено то, что транспортное средство остановлено, выводит скорректированное значение счетчика в модуль 4a вычисления угловых позиций, при этом скорректированное значение счетчика является результатом вычитания числа согласно значению счетчика в момент, когда транспортное средство остановлено, из значений счетчика импульсов скорости вращения колес транспортного средства, выводимых из модуля 6 ABS-управления. Колеса 1 прекращают вращение в момент, когда транспортное средство остановлено, следовательно, импульсы скорости вращения колес, подсчитанные в течение этого периода, могут рассматриваться как вызываемые посредством вибраций колеса 1. Следовательно, вычитание подсчитанного числа, вызываемого посредством вибрации колеса 1, из значения счетчика в силу этого восстанавливает взаимосвязь между угловой позицией идентичного колеса и значением счетчика для импульса скорости вращения колес как взаимосвязь, когда задано опорное число зубьев шестерни, так что может быть определена угловая позиция колеса 1. Соответственно, с учетом того, что ошибочное определение позиции колеса может подавляться, и может быть вычислено значение X дисперсионной характеристики, которое фактически совпадает с фактической угловой позицией колеса 1, привязка между идентификаторами датчиков и позициями колес может быть точно определена, чтобы за счет этого подавлять вероятность задержки определения позиций колес.
Помимо этого, TPMSCU в четвертом варианте осуществления определяет то, находится или нет транспортное средство в режиме заднего хода, и если транспортное средство находится в режиме заднего хода, выводит скорректированное значение счетчика в модуль 4a вычисления угловых позиций, при этом скорректированное значение счетчика является результатом вычитания числа, которое в два раза превышает число согласно значению счетчика, в то время как транспортное средство находится в режиме заднего хода, из значений счетчика импульсов скорости вращения колес транспортного средства, выводимых из модуля 6 ABS-управления. Колеса 1 вращаются назад, в то время как транспортное средство находится в режиме заднего хода, следовательно, импульсы скорости вращения колес, подсчитанные в течение этого периода, могут рассматриваться как вызываемые посредством вращения колеса 1 в режиме заднего хода. Следовательно, вычитание подсчитанного числа, вызываемого посредством вращения колеса 1 в режиме заднего хода, из значения счетчика в силу этого восстанавливает взаимосвязь между угловой позицией идентичного колеса и значением счетчика для импульса скорости вращения колес как взаимосвязь, когда задано опорное число зубьев шестерни, так что может быть определена угловая позиция колеса 1. Соответственно, с учетом того, что ошибочное определение позиции колеса может подавляться, и может быть вычислено значение X дисперсионной характеристики, которое фактически совпадает с фактической угловой позицией колеса 1, привязка между идентификаторами датчиков и позициями колес может быть точно определена, чтобы за счет этого подавлять вероятность задержки определения позиций колес.
Определение остановки транспортного средства или заднего хода транспортного средства
В четвертом варианте осуществления, транспортное средство определяется как остановленное, когда выбирается парковочный диапазон трансмиссии, либо когда все из значений счетчика для импульса скорости вращения колес не подсчитаны в течение предварительно определенного времени (400 мс) или более.
В общем, когда скорость транспортного средства вычисляется с использованием датчика скорости вращения колес, скорость транспортного средства считается равной 0 км/ч для диапазона чрезвычайно низких скоростей транспортного средства (например, меньше 3 км/ч); следовательно, невозможно надежно определять то, остановлено или нет транспортное средство, из импульса скорости вращения колес. С учетом этого, когда выбирается парковочный диапазон трансмиссии, автоматическая трансмиссия блокируется внутренним образом, и ведущие колеса не могут двигаться, следовательно, существует высокая вероятность того, что транспортное средство остановлено. Следовательно, определение того, остановлено или нет транспортное средство, на основе того, выбран или нет парковочный диапазон трансмиссии, за счет этого повышает точность определения того, остановлено или нет транспортное средство.
Если все из значений счетчика для импульсов скорости вращения колес не подсчитаны в течение предварительно определенного времени (400 мс) или более, существует большая вероятность того, что колесо прекращает вращение. Следовательно, определение того, остановлено или нет транспортное средство, на основе интервала импульсов скорости вращения колес повышает точность определения того, остановлено или нет транспортное средство. Причина использования всех значений счетчика для импульсов скорости вращения колес состоит в том, что когда транспортное средство начинает движение на скользкой дороге, и ведущее колесо проскальзывает, с учетом того, что ведущее колесо вращается, а ведомое колесо не вращается, ситуация может ошибочно оцениваться как остановка транспортного средства.
Помимо этого, в четвертом варианте осуществления, транспортное средство определяется как находящееся в режиме заднего хода, когда выбирается парковочный диапазон трансмиссии. С учетом того, что транспортное средство фактически не может перемещаться вперед в то время, когда выбран парковочный диапазон трансмиссии, определение того, что транспортное средство находится в режиме заднего хода, на основе того, выбран или нет диапазон заднего хода трансмиссии, в силу этого повышает точность определения того, находится или нет транспортное средство в режиме заднего хода.
Ниже описываются преимущества.
Устройство мониторинга давления воздуха в шинах из четвертого варианта осуществления демонстрирует следующие преимущества в дополнение к преимуществам (1) и (7)-(9), описанным для первого варианта осуществления, и преимуществам (10)-(12), описанным для второго варианта осуществления.
(17) Предусмотрены модуль 4e определения остановки/заднего хода для определения конкретного состояния транспортного средства (остановка транспортного средства, задний ход транспортного средства), в котором взаимосвязь между угловой позицией для идентичного колеса и значением счетчика отклоняется от предварительно определенной взаимосвязи, и модуль коррекции значений счетчика для коррекции значения счетчика таким образом, что когда конкретное состояние транспортного средства определяется, взаимосвязь между угловой позицией для колес и значением счетчика приближается к предварительно определенной взаимосвязи.
За счет этого можно корректировать отклонение между угловой позицией идентичного колеса и значением счетчика для импульса скорости вращения колес и тем самым точно определять позицию колеса TPMS-датчика 2.
(18) Модуль 4e определения остановки/заднего хода определяет то, остановлено или нет транспортное средство, и модуль 4f коррекции значений счетчика вычитает число согласно значению счетчика в течение периода, когда транспортное средство определяется как остановленное, из значения счетчика, выводимого из модуля 6 ABS-управления.
Соответственно, позиция колеса может быть ошибочно определена вследствие вибрации колеса 1 в момент, когда транспортное средство остановлено; тем не менее, это ошибочное определение позиции колеса может подавляться, и может быть вычислено значение X дисперсионной характеристики, которое фактически совпадает с фактической угловой позицией колеса 1; следовательно, привязка между идентификаторами датчиков и позициями колес может быть точно определена, чтобы за счет этого подавлять вероятность задержки определения позиций колес.
(19) Модуль 4e определения остановки/заднего хода определяет то, что транспортное средство остановлено, когда выбирается парковочный диапазон трансмиссии; следовательно, остановка транспортного средства может быть более точно определена.
(20) Модуль 4e определения остановки/заднего хода определяет то, что транспортное средство остановлено, когда импульсы скорости вращения колес не выводятся из всех датчиков 8 скорости вращения колес в течение предварительно определенного времени или более; следовательно, остановка транспортного средства может быть более точно определена.
(21) Модуль 4e определения остановки/заднего хода определяет то, находится или нет транспортное средство в режиме заднего хода, и модуль 4f коррекции значений счетчика вычитает число, которое в два раза превышает число согласно значению счетчика в течение периода, транспортное средство определяется как находящееся в режиме заднего хода, из значения счетчика, выводимого из модуля 6 ABS-управления.
Соответственно, позиция колеса может быть ошибочно определена вследствие нахождения транспортного средства в режиме заднего хода; тем не менее, это ошибочное определение позиции колеса может подавляться, и может быть вычислено значение X дисперсионной характеристики, которое фактически совпадает с фактической угловой позицией колеса 1; следовательно, привязка между идентификаторами датчиков и позициями колес может быть точно определена, чтобы за счет этого подавлять вероятность задержки определения позиций колес.
(22) Модуль 4e определения остановки/заднего хода определяет то, что транспортное средство находится в режиме заднего хода, когда выбирается диапазон заднего хода трансмиссии; следовательно, задний ход транспортного средства может быть более точно определен.
Другие варианты осуществления изобретения
Оптимальные режимы изобретения описаны на основе чертежей и в соответствии с вышеуказанными вариантами осуществления; тем не менее, конкретная конфигурация настоящего изобретения не ограничена этими вариантами осуществления; модификации в конструкции и т.д. также включаются в пределы объема настоящего изобретения до тех пор, пока модификации не отклоняются от сущности и объема настоящего изобретения. Например, варианты осуществления иллюстрируют пример, в котором режим автообучения продолжается до тех пор, пока число Sn приемов не достигнет предварительно определенного числа раз, тем не менее, TPMSCU может изменяться на режим мониторинга до достижения предварительно определенного числа раз, если все позиции колес указаны в режиме автообучения. В этом случае, передатчик может работать в режиме передачи в постоянной позиции до тех пор, пока число передач не достигнет предварительно определенного числа раз, и приемник, в дополнение к идентификации рабочего режима, может использовать принимаемую информацию.
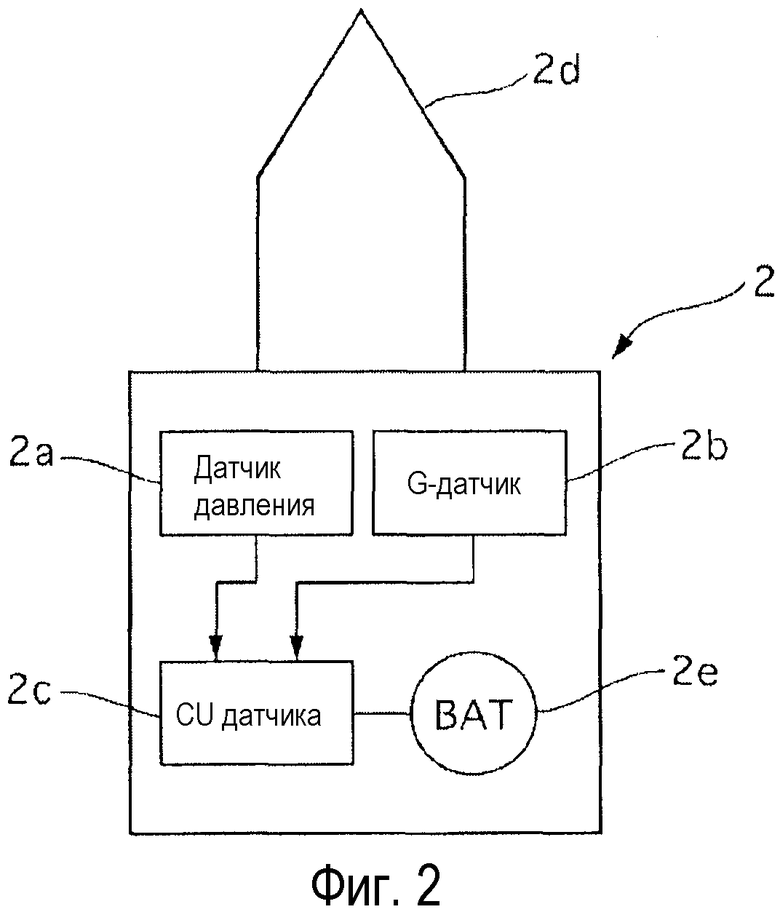
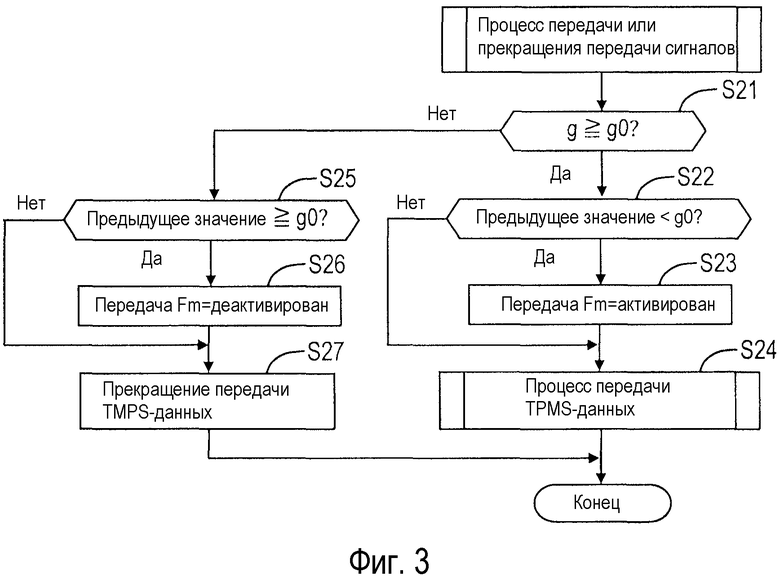
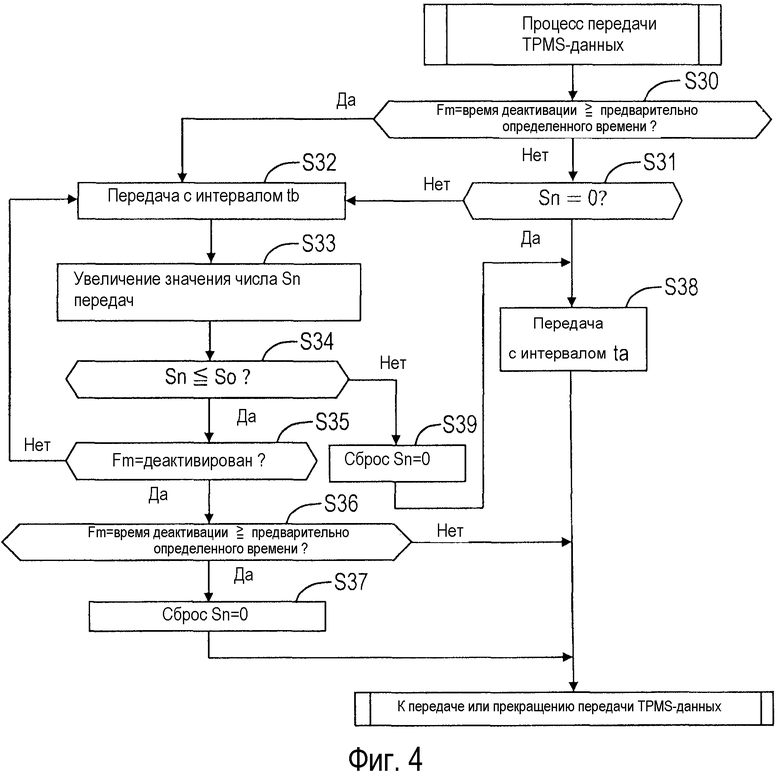
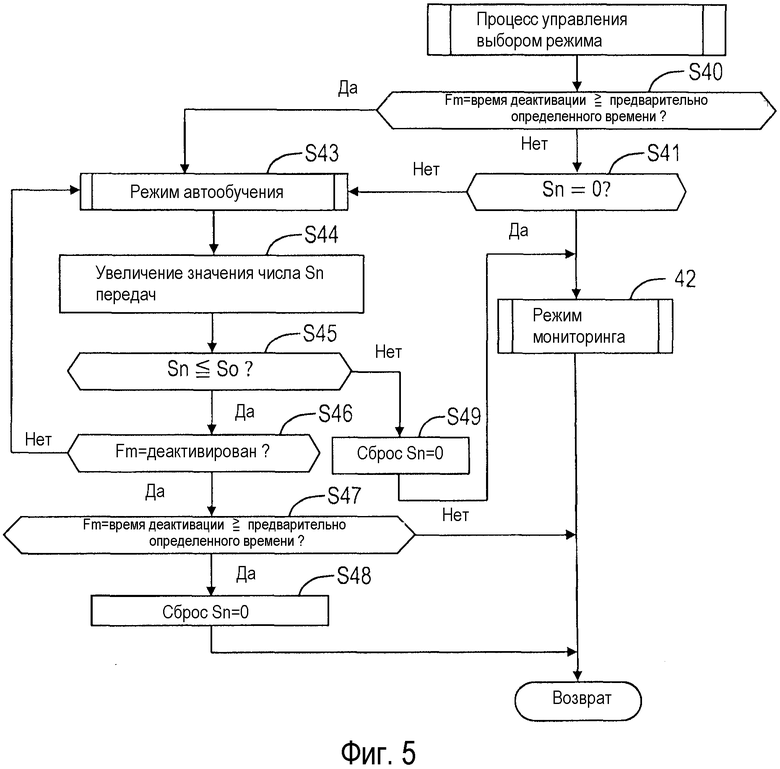
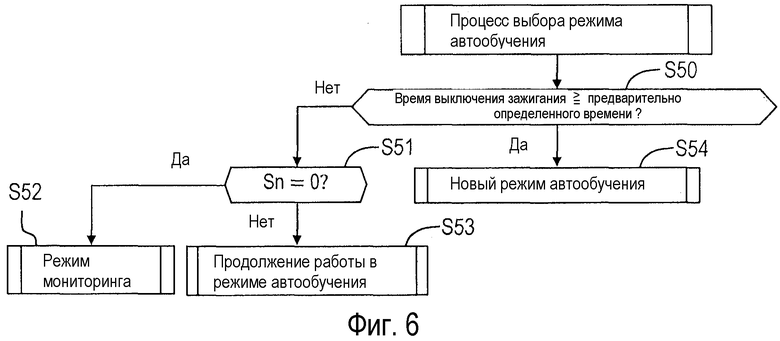
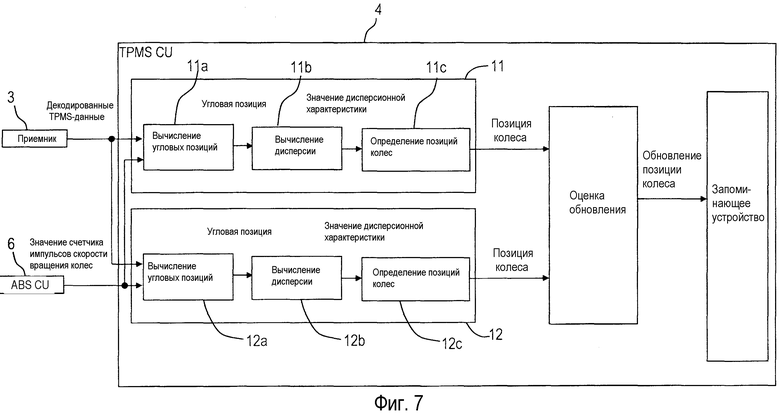
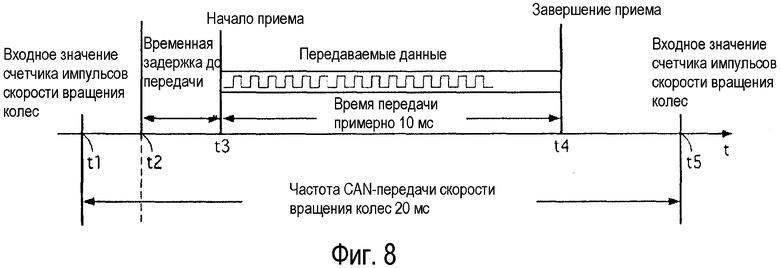
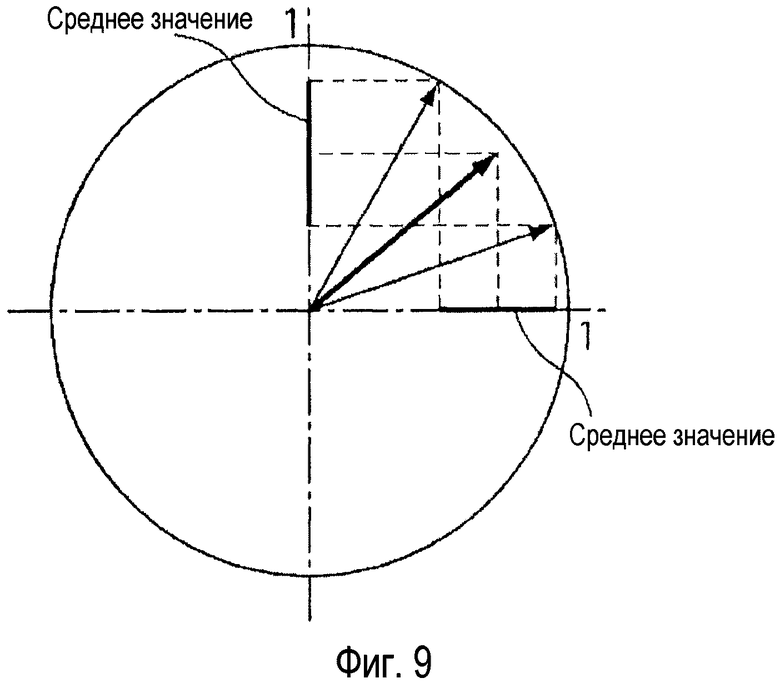
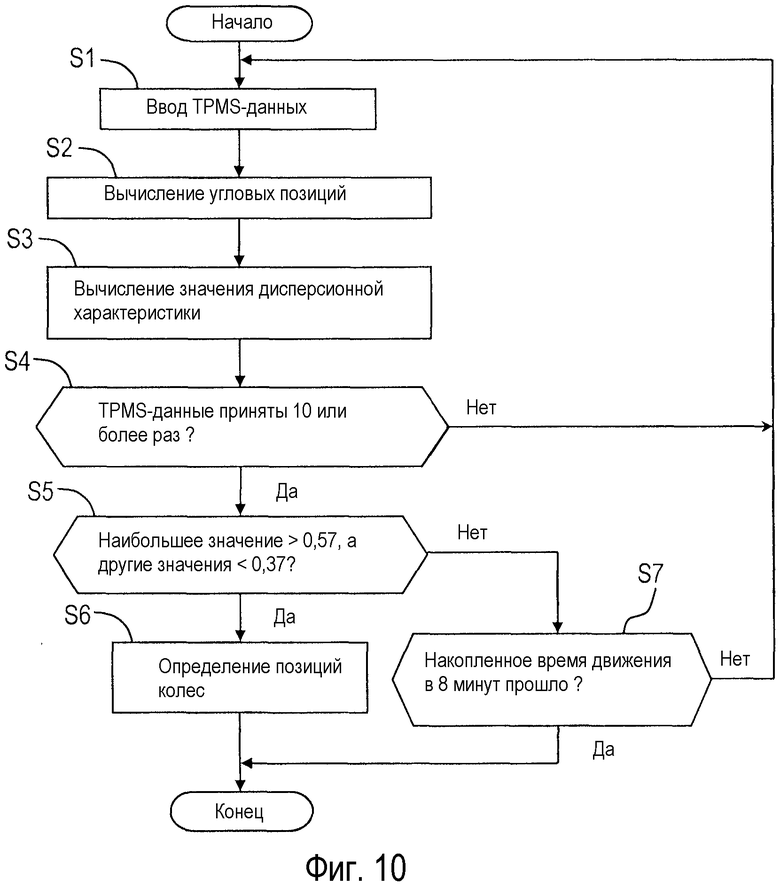
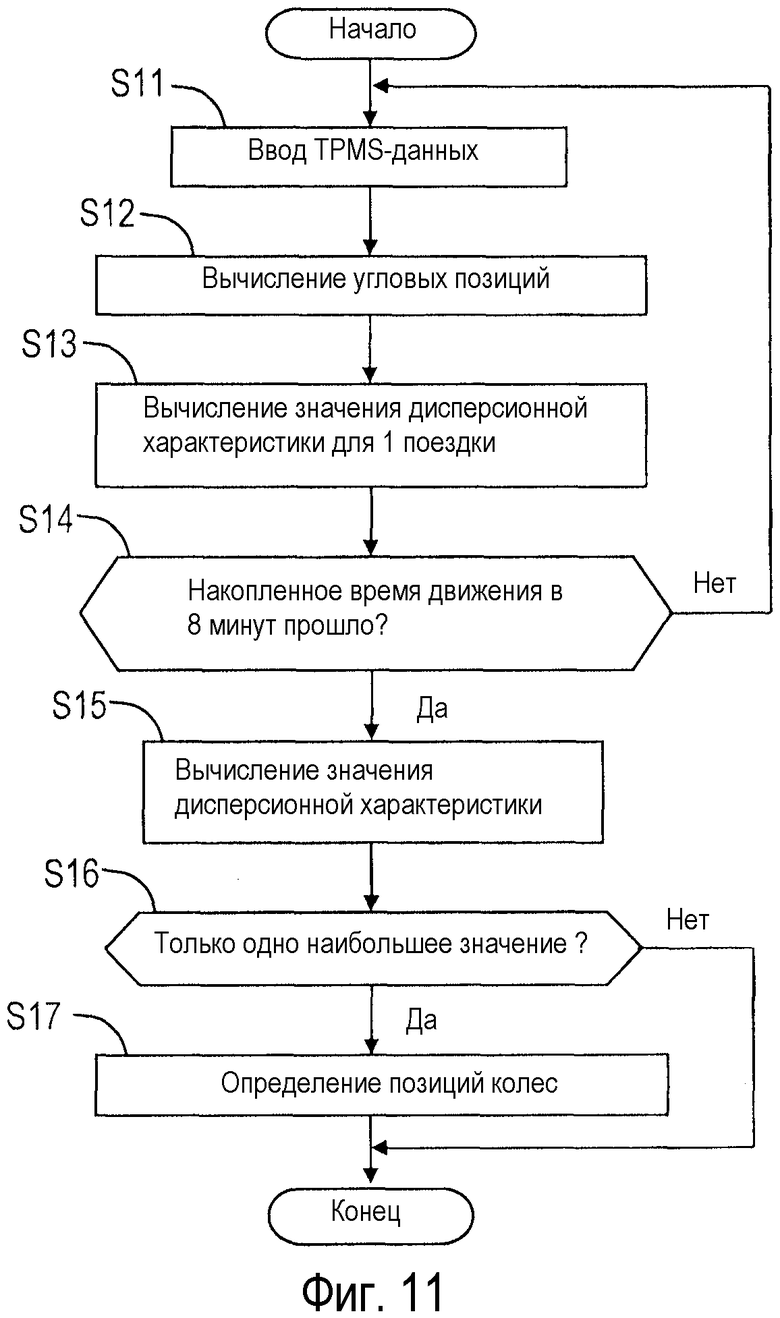
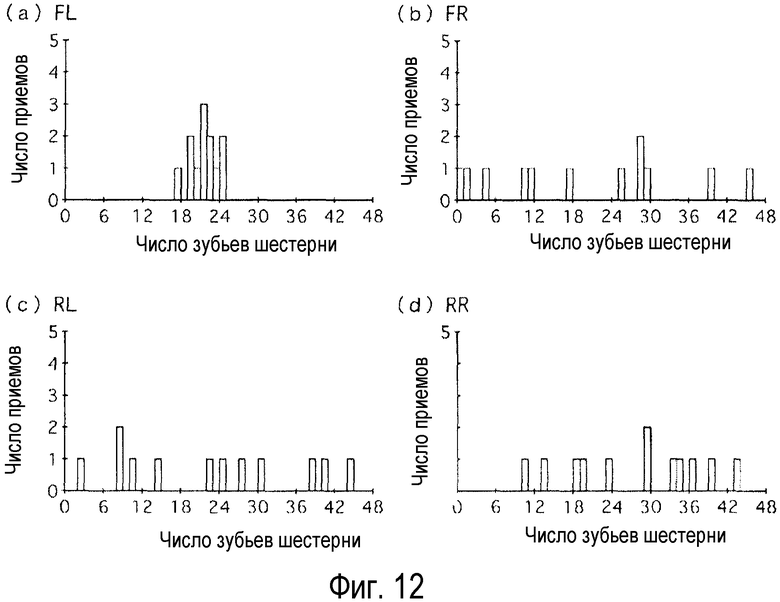
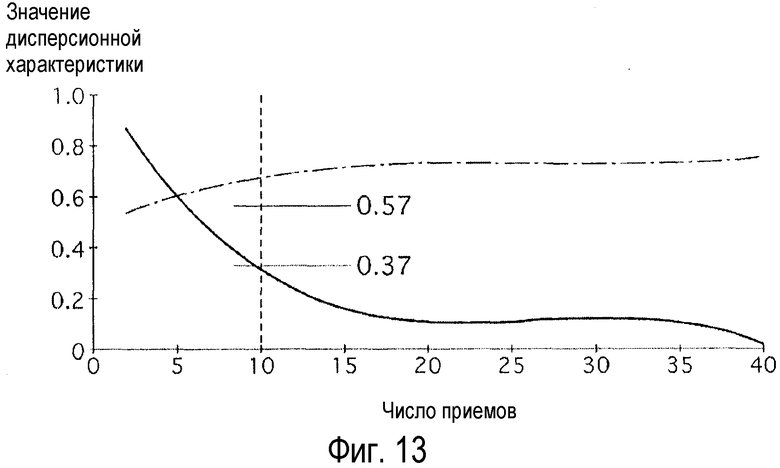
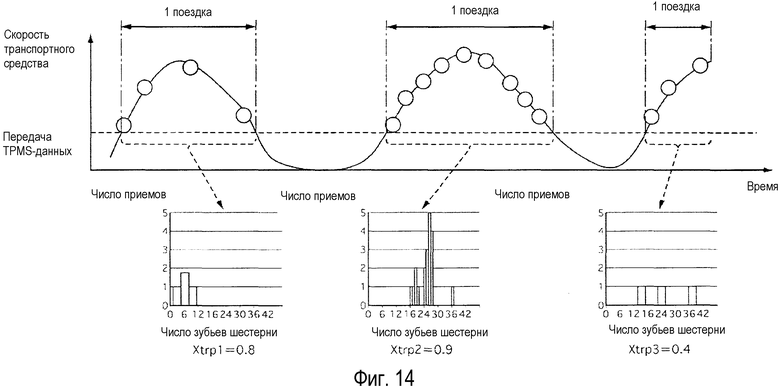
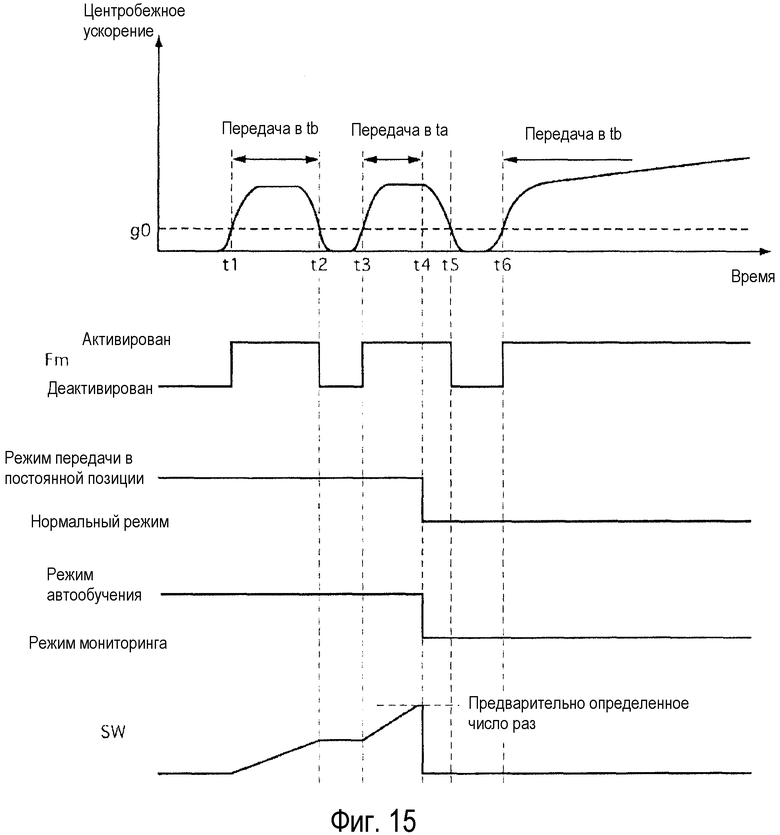
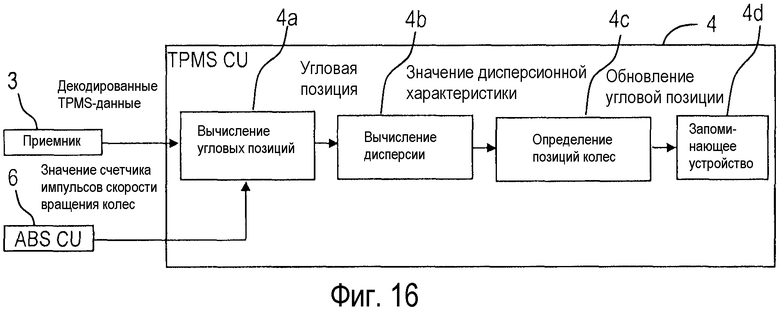
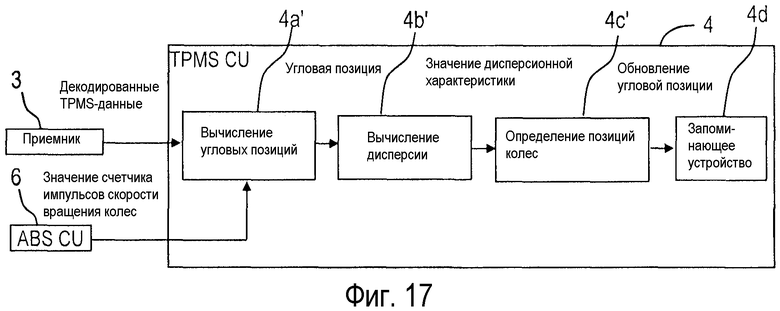
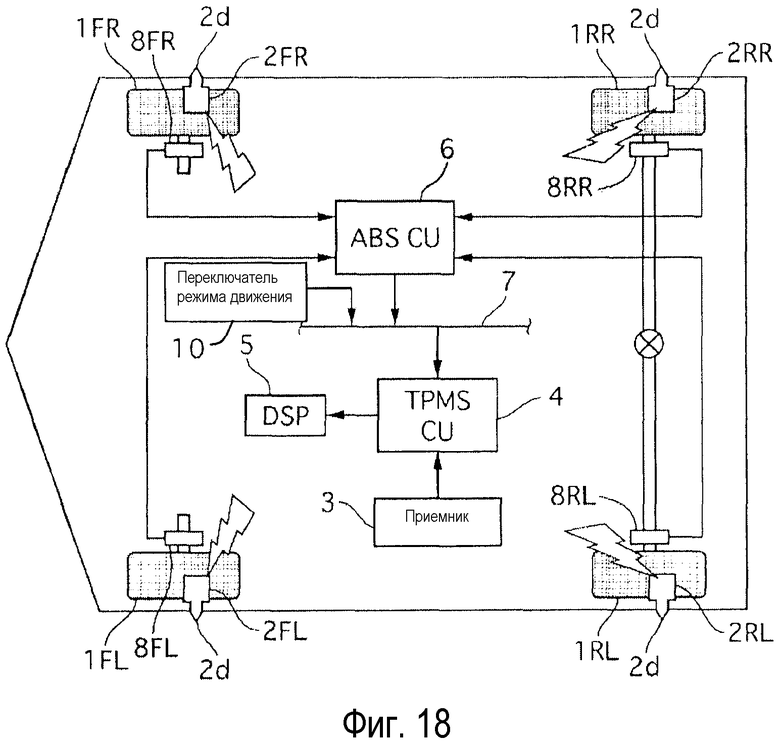
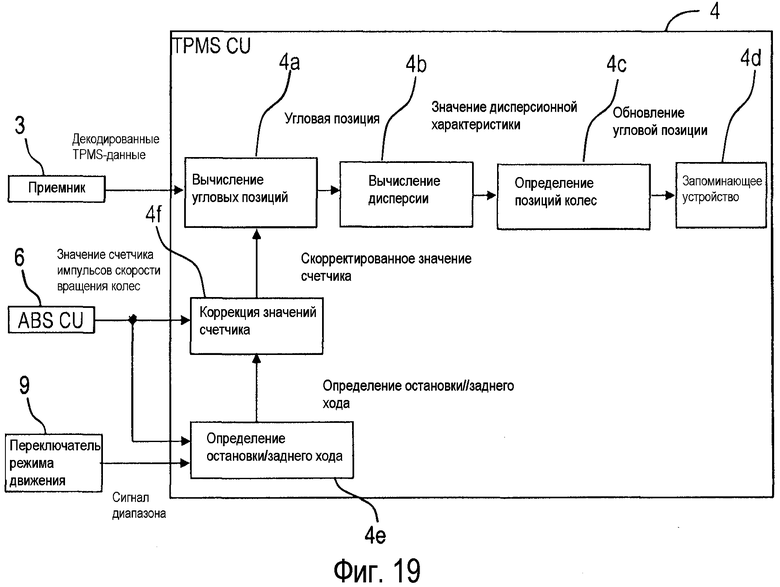
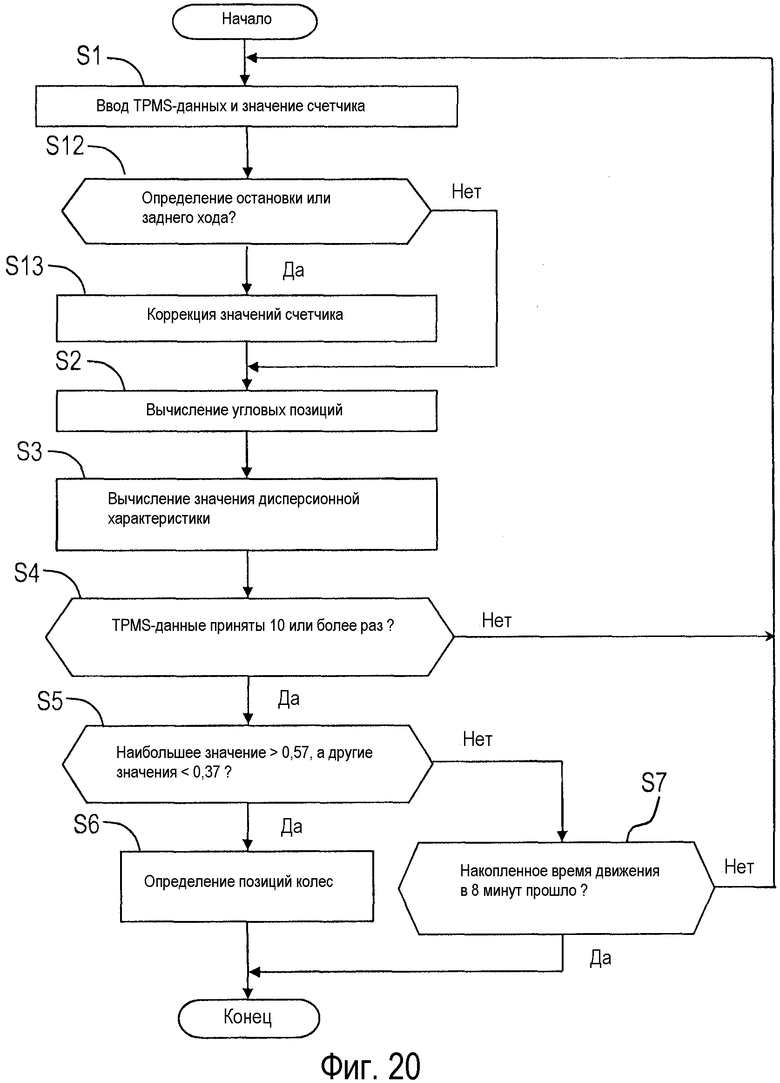
Изобретение относится к автомобильной промышленности. Устройство содержит датчик (2a) давления, установленный в шине каждого из колес (1), для определения давления воздуха в шине; передатчик (2d), предоставленный на каждом из колес (1), для передачи посредством беспроводных сигналов информации давления воздуха вместе с идентификатором датчика в предварительно определенной угловой позиции; приемник (3), предоставленный на кузове транспортного средства, для приема беспроводных сигналов; датчик (8) скорости вращения колес, предоставленный на кузове транспортного средства таким образом, что он соответствует каждому из колес (1), для определения угловой позиции колеса (1); и TPMSCU (4) для получения угловой позиции колес десять или более раз, когда передается беспроводной сигнал, содержащий определенный идентификатор датчика, ее накопления в качестве данных угловой позиции для колес (1) и определения позиции колеса, соответствующего данным угловой позиции, имеющим наименьшую степень дисперсии из числа каждых из данных угловой позиции, в качестве позиции колеса для передатчика (2d), соответствующего идентификатору датчика. Технический результат - повышение точности определения позиции колеса. 3 н. и 26 з.п. ф-лы, 20 ил.
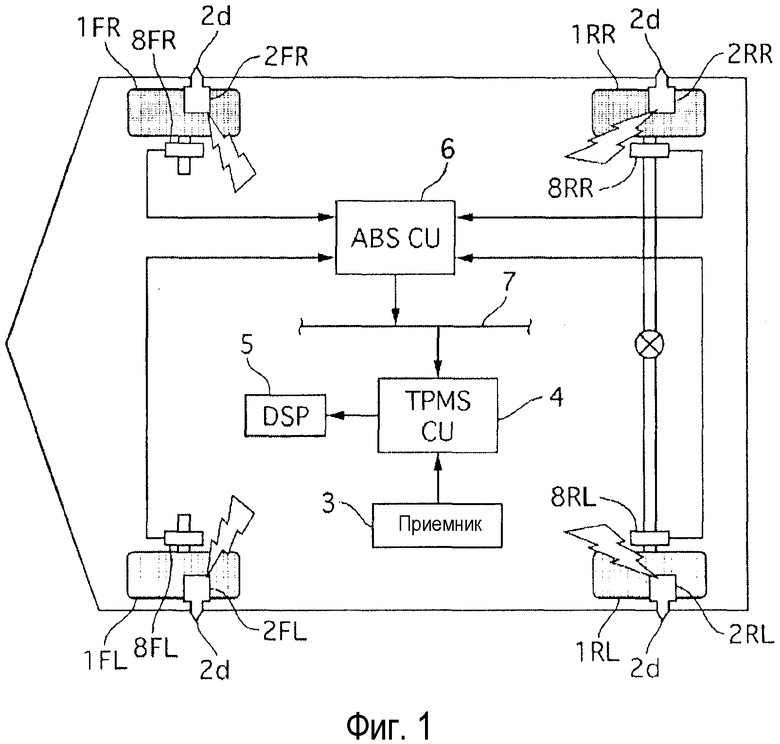
1. Устройство мониторинга давления воздуха в шинах, которое отслеживает давление воздуха в шинах и содержит:
средство определения давления воздуха в шинах, установленное на колесах с шинами, для определения давления воздуха в шинах;
передатчик, расположенный на каждом из колес, для передачи беспроводного сигнала о давлении воздуха вместе с идентификационной информацией, связанной с передатчиком;
приемник, расположенный на кузове транспортного средства, для приема беспроводного сигнала;
средство определения угловых позиций, расположенное на кузове транспортного средства таким образом, что оно соответствует каждому из колес, для определения угловой позиции колеса; и
средство определения позиций колес, которое накапливает в качестве данных угловой позиции для колес угловую позицию колес, полученную многократно, когда передается беспроводной сигнал, включающий в себя определенную идентификационную информацию; и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика, соответствующего идентификационной информации;
при этом средство определения позиций колес преобразует угловую позицию каждого из колес в вектор с начальной точкой в начале координат двумерной плоскости и конечной точкой в точке на окружности единичного круга; вычисляет скалярную величину среднего вектора из векторов для данных угловой позиции в качестве значения дисперсионной характеристики; и определяет наибольшее значение из значений дисперсионной характеристики, имеющих наименьшую степень дисперсии.
2. Устройство по п.1, в котором средство определения позиций колес определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, когда наибольшее значение из значений дисперсионной характеристики превышает первое пороговое значение.
3. Устройство по п.2, в котором средство определения позиций колес определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, если, за исключением значения дисперсионной характеристики, имеющего наибольшее значение, все значения дисперсионной характеристики ниже второго порогового значения, которое меньше первого порогового значения.
4. Устройство по п.1, дополнительно содержащее:
датчик скорости вращения колес для вывода импульса скорости вращения колес, который является количественным соотношением скорости вращения колеса;
средство вычисления значений счетчика для вычисления значения счетчика для импульсов скорости вращения колес;
причем средство определения угловых позиций определяет угловую позицию колеса из значения счетчика для импульса скорости вращения колес; и
средство определения конкретного состояния транспортного средства для определения конкретного состояния транспортного средства, в котором взаимосвязь между угловой позицией идентичного колеса и значением счетчика отклоняется от предварительно определенной взаимосвязи; и
средство коррекции значений счетчика, которое корректирует значение счетчика так, что взаимосвязь между угловой позицией колес и значением счетчика приближается к предварительно определенной взаимосвязи, когда определяется упомянутое конкретное состояние транспортного средства.
5. Устройство по п.4, в котором средство определения конкретного состояния транспортного средства определяет то, что транспортное средство остановлено; и средство коррекции значений счетчика вычитает число согласно значению счетчика в течение периода, когда транспортное средство определяется как остановленное, из значения счетчика, вычисленного посредством средства вычисления значений счетчика.
6. Устройство по п.5, в котором средство определения конкретного состояния транспортного средства определяет то, что транспортное средство остановлено, когда выбирается парковочный диапазон трансмиссии.
7. Устройство по п.6, в котором средство определения конкретного состояния транспортного средства определяет то, что транспортное средство остановлено, когда импульсы скорости вращения колес не выводятся из всех датчиков скорости вращения колес в течение второго предварительно определенного времени или более.
8. Устройство по п.5, в котором средство определения конкретного состояния транспортного средства определяет то, что транспортное средство остановлено, когда импульсы скорости вращения колес не выводятся из всех датчиков скорости вращения колес в течение второго предварительно определенного времени или более.
9. Устройство по любому из пп.4-8, в котором:
средство определения конкретного состояния транспортного средства определяет то, что транспортное средство находится в режиме заднего хода; и
средство коррекции значений счетчика вычитает число, которое в два раза превышает число согласно значению счетчика в течение периода, когда транспортное средство определяется как находящееся в режиме заднего хода, из значения счетчика, вычисленного посредством средства вычисления значений счетчика.
10. Устройство по п.9, в котором средство определения конкретного состояния транспортного средства определяет то, что транспортное средство находится в режиме заднего хода, когда выбирается диапазон заднего хода трансмиссии.
11. Устройство по п.9, в котором:
передатчик имеет средство переключения режима, которое переключает на режим передачи в постоянной позиции, в котором передатчик передает, в первом интервале, когда первое предварительно определенное условие является истинным; и во все остальные времена переключает на нормальный режим, в котором передатчик передает во втором интервале, который превышает первый интервал; причем приемник имеет модуль определения режима для определения рабочего режима передатчика с использованием оценок, идентичных оценкам в средстве оценки режима в передатчике; при этом первое предварительно определенное условие является истинным, когда третье предварительно определенное время или более прошло, и сигналы не переданы из передатчика, или до того, как третье предварительно определенное время или более прошло, и до того, как число передач, передаваемых в первом интервале, достигает предварительно определенного числа;
приемник сохраняет число приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними; и
средство определения позиций колес определяет позицию колеса на основе упомянутых сохраненных данных и новых принимаемых данных.
12. Устройство по п.11, в котором приемник продолжает работу модуля определения режима независимо от состояния переключателя зажигания до тех пор, пока не прошло третье предварительно определенное время.
13. Устройство по любому из пп.1-8 или 10, в котором:
передатчик имеет средство переключения режима, которое переключает на режим передачи в постоянной позиции, в котором передатчик передает, в первом интервале, когда первое предварительно определенное условие является истинным; и во все остальные времена переключает на нормальный режим, в котором передатчик передает во втором интервале, который превышает первый интервал; причем приемник имеет модуль определения режима для определения рабочего режима передатчика с использованием оценок, идентичных оценкам в средстве оценки режима в передатчике; при этом первое предварительно определенное условие является истинным, когда третье предварительно определенное время или более прошло, и сигналы не переданы из передатчика, или до того, как третье предварительно определенное время или более прошло, и до того, как число передач, передаваемых в первом интервале, достигает предварительно определенного числа;
приемник сохраняет число приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними; и
средство определения позиций колес определяет позицию колеса на основе упомянутых сохраненных данных и новых принимаемых данных.
14. Устройство по п.13, в котором приемник продолжает работу модуля определения режима независимо от состояния переключателя зажигания до тех пор, пока не прошло третье предварительно определенное время.
15. Устройство мониторинга давления воздуха в шинах, которое отслеживает давление воздуха в шинах и содержит:
средство определения давления воздуха в шинах, установленное на колесах с шинами, для определения давления воздуха в шинах;
передатчик, расположенный на каждом из колес, для передачи беспроводного сигнала о давлении воздуха вместе с идентификационной информацией, связанной с передатчиком;
приемник, расположенный на кузове транспортного средства, для приема беспроводного сигнала;
датчик скорости вращения колес для вывода импульса скорости вращения колес, который является количественным соотношением скорости вращения колеса;
средство определения угловых позиций, расположенное на кузове транспортного средства таким образом, что оно соответствует каждому из колес, для определения угловой позиции колеса; и
средство определения позиций колес, которое накапливает в качестве данных угловой позиции для колес угловую позицию колес, полученную многократно, когда передается беспроводной сигнал, включающий в себя определенную идентификационную информацию; и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика, соответствующего идентификационной информации;
при этом средство определения позиций колес вычисляет степень дисперсии между данными угловой позиции в течение множества периодов, когда колеса вращаются в одном направлении вплоть до тех пор, пока накопленное время движения для транспортного средства не достигнет первого предварительно определенного времени; и вычисляет конечную степень дисперсии на основе степени дисперсии для каждого из указанных периодов.
16. Устройство по п.15, в котором средство определения позиций колес взвешивает степень дисперсии для каждого из периодов посредством назначения большего весового коэффициента угловой позиции с большим числом элементов данных и вычисляет конечную степень дисперсии на основе взвешенной степени дисперсии для каждого из периодов.
17. Устройство по п.16, в котором из множества периодов, средство определения позиций колес вычисляет конечную степень дисперсии на основе степени дисперсии для периодов, имеющих предварительно определенное число или более элементов данных для угловой позиции.
18. Устройство по п.15, в котором из множества периодов, средство определения позиций колес вычисляет конечную степень дисперсии на основе степени дисперсии для периодов, имеющих предварительно определенное число или более элементов данных для угловой позиции.
19. Устройство по любому из пп.15-18, в котором:
передатчик имеет средство переключения режима, которое переключает на режим передачи в постоянной позиции, в котором передатчик передает, в первом интервале, когда первое предварительно определенное условие является истинным; и во все остальные времена переключает на нормальный режим, в котором передатчик передает во втором интервале, который превышает первый интервал; причем приемник имеет модуль определения режима для определения рабочего режима передатчика с использованием оценок, идентичных оценкам в средстве оценки режима в передатчике; при этом первое предварительно определенное условие является истинным, когда третье предварительно определенное время или более прошло, и сигналы не переданы из передатчика, или до того, как третье предварительно определенное время или более прошло, и до того, как число передач, передаваемых в первом интервале, достигает предварительно определенного числа;
приемник сохраняет число приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними; и
средство определения позиций колес определяет позицию колеса на основе упомянутых сохраненных данных и новых принимаемых данных.
20. Устройство по п.19, в котором приемник продолжает работу модуля определения режима независимо от состояния переключателя зажигания до тех пор, пока не прошло третье предварительно определенное время.
21. Устройство мониторинга давления воздуха в шинах, которое отслеживает давление воздуха в шинах и содержит:
средство определения давления воздуха в шинах, установленное на колесах с шинами, для определения давления воздуха в шинах;
передатчик, расположенный на каждом из колес, для передачи беспроводного сигнала о давлении воздуха вместе с идентификационной информацией, связанной с передатчиком;
приемник, расположенный на кузове транспортного средства, для приема беспроводного сигнала;
датчик скорости вращения колес для вывода импульса скорости вращения колес, который является количественным соотношением скорости вращения колеса;
средство определения угловых позиций, расположенное на кузове транспортного средства таким образом, что оно соответствует каждому из колес, для определения угловой позиции колеса; и
средство определения позиций колес, которое накапливает в качестве данных угловой позиции для колес угловую позицию колес, полученную многократно, когда передается беспроводной сигнал, включающий в себя определенную идентификационную информацию; и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии из числа данных угловой позиции, в качестве позиции колеса для передатчика, соответствующего идентификационной информации;
при этом средство определения позиций колес дополнительно включает в себя:
первый модуль определения, который до того, как накопленное время движения транспортного средства достигает предварительно определенного накопленного времени движения, вычисляет степень дисперсии данных позиции колеса, когда число элементов данных для данных угловой позиции составляет предварительно определенное число или более; вычисляет степень дисперсии между данными позиции колеса и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии, в качестве позиции колеса для передатчика, соответствующего идентификатору датчика; и
второй модуль определения, который, когда накопленное время движения транспортного средства достигает предварительно определенного накопленного времени движения, вычисляет степень дисперсии между данными позиции колеса и определяет позицию колеса, соответствующую данным угловой позиции, имеющим наименьшую степень дисперсии, в качестве позиции колеса для передатчика, соответствующего идентификатору датчика.
22. Устройство по п.21, в котором средство определения позиций колес преобразует угловую позицию каждого из колес в вектор с начальной точкой в начале координат двумерной плоскости и конечной точкой в точке на окружности единичного круга; вычисляет скалярную величину среднего вектора векторов для данных угловой позиции в качестве значения дисперсионной характеристики; и сравнивает значения дисперсионной характеристики и определяет степень дисперсии между значениями дисперсионной характеристики.
23. Устройство по п.22, в котором первый модуль определения определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, когда наибольшее значение из значений X дисперсионной характеристики превышает первое пороговое значение.
24. Устройство по п.23, в котором первый модуль определения определяет данные угловой позиции, соответствующие наибольшему значению, как имеющие наименьшую степень дисперсии, если, за исключением значения дисперсионной характеристики, имеющего наибольшее значение, все значения дисперсионной характеристики ниже второго порогового значения, которое меньше первого порогового значения.
25. Устройство по любому из пп.22-24, в котором для каждого периода, когда колеса движутся в одном направлении в течение предварительно определенного накопленного времени движения, второй модуль управления вычисляет значение дисперсионной характеристики между данными угловой позиции для отдельного периода на основе данных угловой позиции, полученных в течение упомянутого периода, и вычисляет общее значение дисперсионной характеристики между данными угловой позиции на основе значения дисперсионной характеристики для отдельных периодов и в завершение определяет данные угловой позиции, соответствующие наибольшему общему значению дисперсионной характеристики из общих значений дисперсионной характеристики, как имеющие наименьшую степень дисперсии.
26. Устройство по п.25, в котором:
передатчик имеет средство переключения режима, которое переключает на режим передачи в постоянной позиции, в котором передатчик передает, в первом интервале, когда первое предварительно определенное условие является истинным; и во все остальные времена переключает на нормальный режим, в котором передатчик передает во втором интервале, который превышает первый интервал; причем приемник имеет модуль определения режима для определения рабочего режима передатчика с использованием оценок, идентичных оценкам в средстве оценки режима в передатчике; при этом первое предварительно определенное условие является истинным, когда третье предварительно определенное время или более прошло, и сигналы не переданы из передатчика, или до того, как третье предварительно определенное время или более прошло, и до того, как число передач, передаваемых в первом интервале, достигает предварительно определенного числа;
приемник сохраняет число приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними; и
средство определения позиций колес определяет позицию колеса на основе упомянутых сохраненных данных и новых принимаемых данных.
27. Устройство по п.26, в котором приемник продолжает работу модуля определения режима независимо от состояния переключателя зажигания до тех пор, пока не прошло третье предварительно определенное время.
28. Устройство по любому из пп.21-24, в котором:
передатчик имеет средство переключения режима, которое переключает на режим передачи в постоянной позиции, в котором передатчик передает, в первом интервале, когда первое предварительно определенное условие является истинным; и во все остальные времена переключает на нормальный режим, в котором передатчик передает во втором интервале, который превышает первый интервал; причем приемник имеет модуль определения режима для определения рабочего режима передатчика с использованием оценок, идентичных оценкам в средстве оценки режима в передатчике; при этом первое предварительно определенное условие является истинным, когда третье предварительно определенное время или более прошло, и сигналы не переданы из передатчика, или до того, как третье предварительно определенное время или более прошло, и до того, как число передач, передаваемых в первом интервале, достигает предварительно определенного числа;
приемник сохраняет число приемов, принимаемых в ходе режима передачи в постоянной позиции, и данные, принимаемые вместе с ними; и
средство определения позиций колес определяет позицию колеса на основе упомянутых сохраненных данных и новых принимаемых данных.
29. Устройство по п.28, в котором приемник продолжает работу модуля определения режима независимо от состояния переключателя зажигания до тех пор, пока не прошло третье предварительно определенное время.
| JP 2010122023 A, 03.06.2010 | |||
| JP 2007237827 A, 20.09.2007 | |||
| JP 2006142873 A, 08.06.2006 |

