Настоящее изобретение, в целом, относится к системам предотвращения кражи колес транспортного средства и, в частности, к отслеживанию колеса, снятого с транспортного средства.
Кража или несанкционированное снятие колес с транспортного средства становится все более распространенным явлением, особенно в связи с использованием новых конструкций колес из высококачественных, дорогостоящих материалов. Существующие решения для предотвращения кражи колес транспортного средства имеют ряд недостатков. Например, одно из существующих решений заключается в размещении на каждом колесе специализированных запорных или защищающих от кражи нестандартных гаек, для снятия которых требуется специальный торцевой ключ. Однако воры, специализирующиеся на краже колес, находят способы преодоления или обхода такой механической защиты. В соответствии с другой существующей системой предотвращения кражи в каждом колесе транспортного средства размещают датчик контроля давления в шине (TPM) и обнаруживают кражу колеса, когда датчик прекращает передачу информации о давлении в шинах транспортному средству. В ответ на обнаружение кражи телематический блок транспортного средства передает уведомление о краже в центр обработки звонков, государственный орган или владельцу транспортного средства. Однако такие решения не позволяют отслеживать украденное колесо после его снятия с транспортного средства.
Хотя существуют другие системы предотвращения кражи, которые могут отслеживать местоположение украденного колеса, например, с использованием данных GPS, передаваемых отслеживающим устройством, установленным внутри колеса, эти системы дополнительно увеличивают стоимость и сложность изготовления каждого колеса и потребляют большое количество энергии. Например, одна из таких систем требует установки и калибровки отдельного специализированного аппаратного обеспечения для предотвращения кражи в каждое колесо, включающее в себя датчик близости для обнаружения несанкционированного снятия колеса, GPS-приемник для отслеживания географического местоположения колеса и дополнительную схему беспроводной связи для передачи местоположения колеса владельцу транспортного средства или другому объекту.
Соответственно, в уровне техники все еще существует необходимость обеспечения улучшенной системы предотвращения кражи колес транспортного средства, которая выполнена с возможностью эффективного отслеживания колеса, снятого с транспортного средства, а также минимизирует стоимость, сложность и энергопотребление колес транспортного средства.
Изобретение предназначено для решения вышеуказанных и других проблем путем обеспечения улучшенной системы и способа предотвращения кражи колес транспортного средства, в соответствии с которыми помимо прочего размещают беспроводной приемопередатчик в каждом колесе транспортного средства для передачи информации о давлении в шинах для колеса в транспортное средство и используют тот же беспроводной приемопередатчик для обнаружения снятия колеса с транспортного средства и отслеживания местоположения снятого колеса при его удалении от транспортного средства.
Например, один вариант выполнения обеспечивает транспортное средство, содержащее множество колес, причем каждое колесо включает в себя датчик давления и беспроводной приемопередатчик; центральный приемопередатчик, выполненный с возможностью получения информации о давлении в шинах и мощности сигнала от каждого из беспроводных приемопередатчиков; и процессор, коммуникативно связанный с центральным приемопередатчиком и выполненный с возможностью обнаружения снятия/удаления одного из колес на основе информации о мощности сигнала, получаемой от беспроводного приемопередатчика, встроенного в снятое колесо.
Другой примерный вариант выполнения обеспечивает способ, включающий этапы, на которых получают информацию о давлении в шинах и мощности сигнала от каждого из множества беспроводных приемопередатчиков, соответственно связанных с множеством колес транспортного средства; и обнаруживают с использованием одного или более процессоров снятие/удаление одного из колес с транспортного средства на основе информации о мощности сигнала, получаемой от беспроводного приемопередатчика, встроенного в снятое колесо.
Таким образом, согласно первому объекту настоящего изобретения создано транспортное средство, содержащее:
множество колес, каждое из которых включает в себя датчик давления и беспроводной приемопередатчик;
центральный приемопередатчик, выполненный с возможностью получения информации о давлении в шинах и мощности сигнала от каждого из беспроводных приемопередатчиков; и
процессор, коммуникативно связанный с центральным приемопередатчиком и выполненный с возможностью обнаружения снятия одного из колес на основе информации о мощности сигнала, получаемой от беспроводного приемопередатчика, встроенного в снятое колесо.
Предпочтительно, беспроводной приемопередатчик в каждом колесе принимает информацию о давлении в шинах от соответствующего датчика давления для данного колеса.
Предпочтительно, каждый беспроводной приемопередатчик выполнен с возможностью периодической передачи центральному приемопередатчику беспроводного сигнала, содержащего информацию о давлении в шинах, информацию о мощности сигнала и идентификационную информацию, связанную с беспроводным приемопередатчиком.
Предпочтительно, транспортное средство дополнительно содержит телематический блок, коммуникативно связанный с процессором,
причем процессор дополнительно выполнен с возможностью генерирования уведомления о снятии, содержащего запрос на отслеживание беспроводного приемопередатчика снятого колеса; и
телематический блок выполнен с возможностью передачи уведомления о снятии одному или более соседним транспортным средствам, находящимся в пределах диапазона беспроводной передачи снятого беспроводного приемопередатчика.
Предпочтительно, уведомление о снятии включает в себя инструкции для обнаружения беспроводного приемопередатчика, встроенного в снятое колесо, и получения текущей информации о мощности сигнала от указанного приемопередатчика.
Предпочтительно, процессор дополнительно выполнен с возможностью определения предполагаемого местоположения снятого колеса на основе текущей информации о мощности сигнала, получаемой одним или более соседними транспортными средствами от беспроводного приемопередатчика снятого колеса.
Предпочтительно, телематический блок передает уведомление о снятии удаленному серверу для пересылки одному или более соседним транспортным средствам и дополнительно выполнен с возможностью приема от удаленного сервера текущей информации о мощности сигнала, получаемой одним или более соседними транспортными средствами от беспроводного приемопередатчика снятого колеса.
Предпочтительно, телематический блок передает уведомление о снятии непосредственно одному или более соседним транспортным средствам и дополнительно выполнен с возможностью приема от одного или более соседних транспортных средств текущей информации о мощности сигнала, получаемой от беспроводного приемопередатчика снятого колеса.
Предпочтительно, телематический блок передает уведомление о снятии удаленному серверу для пересылки одному или более соседним транспортным средствам и дополнительно выполнен с возможностью приема от удаленного сервера предполагаемого местоположения беспроводного приемопередатчика, встроенного в снятое колесо, на основе текущей информации о мощности сигнала, получаемой одним или более соседними транспортными средствами.
Предпочтительно, беспроводной приемопередатчик, встроенный в каждое из множества колес, представляет собой приемопередатчик глобальной сети дальнего радиуса действия (LoRaWAN).
Предпочтительно, центральный приемопередатчик представляет собой приемопередатчик LoRaWAN, выполненный с возможностью связи с беспроводным приемопередатчиком в каждом из множества колес.
Предпочтительно, после приема уведомления о снятии, запрашивающего транспортное средство об отслеживании беспроводного приемопередатчика, снятого с другого транспортного средства, процессор дополнительно выполнен с возможностью выдачи инструкции центральному приемопередатчику для обнаружения беспроводного сигнала, передаваемого беспроводным приемопередатчиком, снятым с другого транспортного средства, и получения информации о мощности сигнала от указанного беспроводного приемопередатчика.
Согласно второму объекту настоящего изобретения создан способ, при котором:
получают информацию о давлении в шинах и мощности сигнала от каждого из множества беспроводных приемопередатчиков, соответственно связанных с множеством колес транспортного средства; и
обнаруживают с использованием одного или более процессоров снятие одного из колес с транспортного средства на основе информации о мощности сигнала, получаемой от беспроводного приемопередатчика, встроенного в снятое колесо.
Предпочтительно, обнаружение снятия одного из колес включает в себя обнаружение снижения мощности сигнала беспроводного приемопередатчика снятого колеса.
Предпочтительно, дополнительно:
генерируют с использованием одного или более процессоров уведомление о снятии, содержащее запрос на отслеживание беспроводного приемопередатчика снятого колеса; и
передают уведомление о снятии одному или более соседним транспортным средствам, находящимся в пределах диапазона беспроводной передачи беспроводного приемопередатчика, встроенного в снятое колесо.
Предпочтительно, уведомление о снятии включает в себя инструкции для обнаружения беспроводного приемопередатчика, встроенного в снятое колесо, и получения текущей информации о мощности сигнала от него.
Предпочтительно, дополнительно определяют с использованием одного или более процессоров предполагаемое местоположение снятого колеса относительно одного или более соседних транспортных средств на основе текущей информации о мощности сигнала, получаемой одним или более соседними транспортными средствами.
Предпочтительно, при определении предполагаемого местоположения:
принимают текущую информацию о мощности сигнала снятого беспроводного приемопередатчика от по меньшей мере трех соседних транспортных средств;
принимают информацию о географическом местоположении каждого из по меньшей мере трех соседних транспортных средств; и
определяют местоположение снятого беспроводного приемопередатчика относительно по меньшей мере трех соседних транспортных средств методом триангуляции с использованием географических местоположений по меньшей мере трех соседних транспортных средств и получаемой текущей информации о мощности сигнала.
Предпочтительно, при определении предполагаемого местоположения дополнительно вычисляют расстояние между снятым беспроводным приемопередатчиком и каждым из по меньшей мере трех соседних транспортных средств на основе текущей информации о мощности сигнала, получаемой соответствующим соседним транспортным средством.
Предпочтительно, дополнительно после приема уведомления о снятии, запрашивающего транспортное средство об отслеживании беспроводного приемопередатчика, встроенного в колесо, снятое с другого транспортного средства, выдают инструкцию центральному приемопередатчику, встроенному в транспортное средство, для обнаружения беспроводного сигнала, передаваемого снятым беспроводным приемопередатчиком, и получения информации о мощности сигнала от снятого беспроводного приемопередатчика.
Следует понимать, что настоящее изобретение определяется приложенной формулой изобретения. Описание обобщает аспекты вариантов выполнения и не должно использоваться для ограничения формулы изобретения. Другие реализации рассматриваются в соответствии с описанными в настоящем документе технологиями, которые будут понятны специалисту в области техники при изучении следующих далее чертежей и подробного описания, и такие варианты выполнения находятся в пределах объема охраны настоящей заявки.
Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены для подчеркивания и наглядной иллюстрации новых описанных в настоящем документе признаков. В дополнение, компоненты системы могут быть расположены различным образом, известным в уровне техники. Кроме того, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на различных видах. На чертежах:
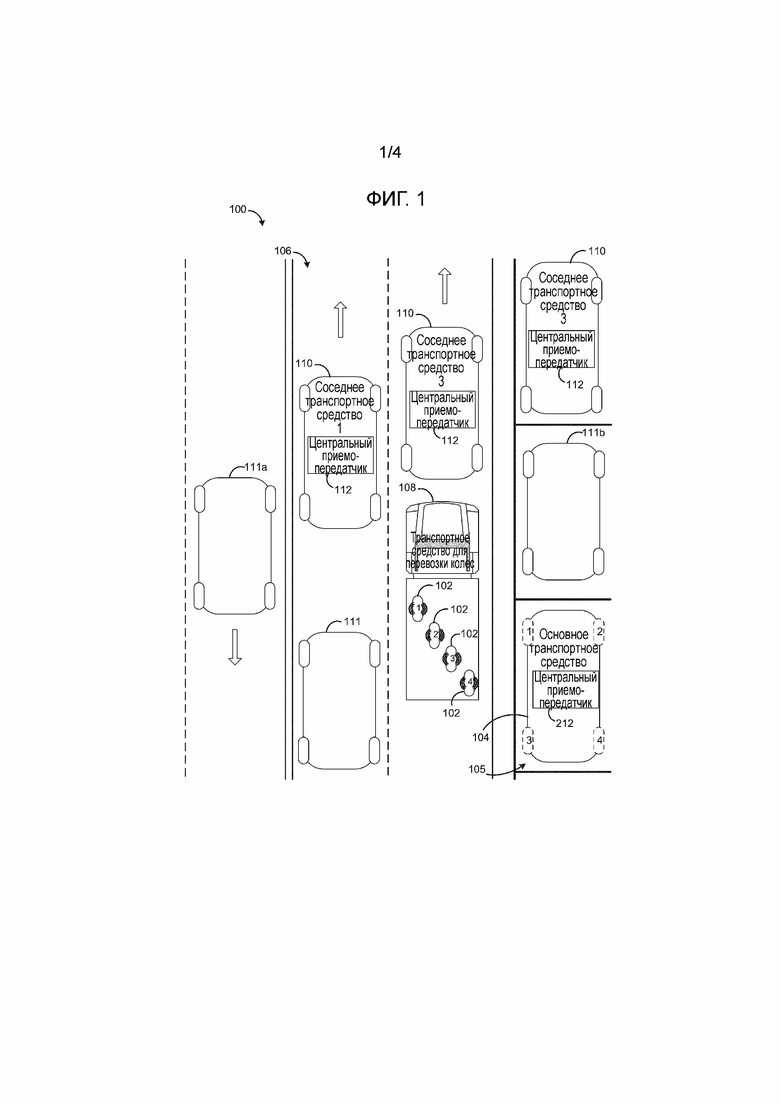
Фиг. 1 - иллюстрация примерной среды отслеживания колеса, снятого с основного транспортного средства, с использованием беспроводной связи с соседними транспортными средствами в соответствии с некоторыми вариантами выполнения изобретения;
Фиг. 2 - структурная схема примерной вычислительной системы транспортного средства, встроенной в одно или более транспортных средств, показанных на Фиг. 1, в соответствии с некоторыми вариантами выполнения изобретения;
Фиг. 3 - структурная схема примерной беспроводной системы, содержащей основное транспортное средство и соседние транспортные средства, показанные на Фиг. 1, в соответствии с некоторыми вариантами выполнения изобретения; и
Фиг. 4 - блок-схема примерного способа отслеживания колеса, снятого с транспортного средства, в соответствии с некоторыми вариантами выполнения изобретения.
Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами выполнения.
В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование единственного числа не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов.
Фиг. 1 иллюстрирует примерную среду 100 отслеживания одного или более колес 102, которые были сняты с транспортного средства 104, в соответствии с вариантами выполнения. Как показано, транспортное средство 104 припарковано на парковочном месте 105 рядом с дорогой 106 и изначально включало четыре колеса 102. Все четыре колеса 102 были сняты с транспортного средства 104 (также называемого в настоящем документе «основным транспортным средством») и размещены на транспортном средстве 108 для перевозки колес, которое движется в направлении от транспортного средства 104 по дороге 106.
Как показано, среда 100 также может включать в себя одно или более соседних транспортных средств 110, которые находятся в пределах заданного расстояния от колес 102 и выполнены с возможностью обнаружения и отслеживания колес 102, снятых с основного транспортного средства 104. Например, в вариантах выполнения основное транспортное средство 104 и каждое из соседних транспортных средств 110 могут включать в себя систему транспортного средства (например, систему 200 транспортного средства, показанную на Фиг. 2), которая выполнена с возможностью обеспечения отслеживания колес 102 путем взаимодействия с другими системами либо непосредственно (например, с использованием связи между транспортными средствами) или опосредованно (например, через удаленный сервер) и/или обмена информацией, связанной с обнаружением и отслеживанием украденных колес 102. В некоторых случаях системы транспортных средств 104 и 110 могут совместно формировать или работать как распределенная система транспортных средств (например, беспроводная система 300, показанная на Фиг. 3), которая связывает отдельные системы транспортных средств по сети беспроводной связи, такой как, например, облачная вычислительная сеть, находящаяся под управлением и/или связанная с общим производителем транспортных средств.
Как также проиллюстрировано на Фиг. 1, среда 100 может дополнительно включать в себя одно или более других транспортных средств 111, которые не способны содействовать отслеживанию колес 102. Например, эти транспортные средства 111 могут включать в себя систему транспортного средства, которая не способна обеспечивать отслеживание и обнаружение колес 102, снятых с транспортного средства 104. В качестве другого примера транспортные средства 111 могут включать в себя систему транспортного средства, которая не совместима с системами транспортных средств 104 и 110 или не имеет соответствующего допуска для взаимодействия с такими системами. В других вариантах выполнения все транспортные средства на дороге 106 или вблизи колес 102 могут включать в себя подходящую систему транспортного средства для содействия обнаружению и отслеживанию колес 102.
Хотя описанные в настоящем документе варианты выполнения рассматриваются в контексте основного транспортного средства 104 и снятых с него колес 102, следует понимать, что такие же технологии могут быть применены при обнаружении колеса, снятого с любого из соседних транспортных средств 110. Например, в таких случаях основное транспортное средство 104 может присоединяться к другим соседним транспортным средствам 110, содействуя обнаружению снятого колеса. Кроме того, хотя на Фиг. 1 показано только три соседних транспортных средства 110, следует понимать, что в соответствии с технологиями, описанными в настоящем документе, в среде 100 может находиться любое другое количество соседних транспортных средств 110. Также хотя проиллюстрированный вариант выполнения изображает транспортное средство 108 для перевозки колес в виде движущегося грузовика, следует понимать, что транспортное средство 108 для перевозки колес может представлять собой транспортное средство или контейнер любого типа, способный удерживать колеса 102, и в некоторых случаях может быть припарковано или находиться в стационарном месте. Кроме того, хотя на Фиг. 1 все соседние транспортные средства 110 показаны движущимися в том же направлении, что и транспортное средство 108 для перевозки колес, по дороге 106 и/или в направлении от основного транспортного средства 104, в других случаях соседние транспортные средства 110 могут двигаться в противоположном направлении по дороге 106, например, вместе с транспортным средством 111a или вообще не двигаться, например, как транспортное средство 111b, припаркованное рядом с дорогой 106. Как будет понятно специалисту в данной области техники, описанные в настоящем документе варианты выполнения предназначены для охвата этих и других вариаций среды 100, показанной на Фиг. 1.
Дополнительно обратимся к Фиг. 2, на которой показана примерная система 200 транспортного средства, встроенная в основное транспортное средство 104 и выполненная с возможностью обеспечения отслеживания одного или более колес 102, снятых с транспортного средства 104, в соответствии с вариантами выполнения. Система 200 транспортного средства включает в себя множество модулей 202 колес, и каждый модуль 202 колеса встроен в соответствующее из колес 102 основного транспортного средства 104. Как показано, каждый модуль 202 колеса включает в себя беспроводной приемопередатчик 203 (также называемый в настоящем документе «приемопередатчиком колеса»), выполненный с возможностью передачи беспроводного сигнала центральному беспроводному приемопередатчику 212 (также называемому в настоящем документе «центральным приемопередатчиком») системы 200 транспортного средства и приема беспроводных сигналов от него. Каждый модуль 202 колеса также включает в себя датчик 214 давления в шине для измерения давление в шине соответствующего колеса 102. Например, датчики 214 могут представлять собой датчики давления, установленные в каждом колесе 102 транспортного средства 104, или датчики любого другого типа, выполненные с возможностью измерения давление в шине. Каждый датчик 214 давления в шине может быть выполнен с возможностью передачи измерений давления в шине, уникального идентификационного номера (ID), связанного с колесом 102 и/или датчиком 214, и/или другой соответствующей информации (в общем называемой в настоящем документе «информацией о давлении в шинах») приемопередатчику 203 колеса, встроенному в тот же модуль 202 колеса. Каждый приемопередатчик 203 колеса может быть выполнен с возможностью беспроводной передачи или передачи иным образом информации о давлении в шинах центральному приемопередатчику 212.
Как показано на Фиг. 2, система 200 транспортного средства дополнительно включает в себя вычислительную систему 216 транспортного средства (VCS), коммуникативно связанную с центральным приемопередатчиком 212 (например, посредством проводного или беспроводного соединения). После приема информации о давлении в шинах от центрального приемопередатчика 212 VCS 216 передает информацию в систему 218 контроля давления в шинах (TPMS), встроенную в VCS 216. С использованием принятой информации TPMS 218 отслеживает давление в шине каждого из колес 102 и предупреждает водителя, если давление в шине любого из колес 102 падает ниже определенного уровня. TPMS 218 также может определять в предупреждении, какое из колес 102 имеет низкое давление в шине на основе уникального номера ID, включенного в информацию о давлении в шинах, принимаемую от центрального приемопередатчика 212.
В дополнение к передаче информации о давлении в шинах центральному приемопередатчику 212 каждый из приемопередатчиков 203 колес также может быть выполнен с возможностью передачи информации о мощности сигнала, указывающей мощность беспроводного сигнала, передаваемого соответствующим приемопередатчиком 203 колеса. Например, информация о мощности сигнала, передаваемая каждым приемопередатчиком 203 колеса, может включать в себя измерение отношения сигнал/шум (SNR) для данного приемопередатчика 203 колеса. В вариантах выполнения информация о мощности сигнала, принимаемая от каждого приемопередатчика 203 колеса, может быть использована TPMS 218 и/или другим компонентом VCS 216 для определения, находится ли соответствующее колесо 102 на транспортном средстве 104 или снято с него. Например, пока мощность сигнала каждого приемопередатчика 203 колеса остается высокой, система 200 транспортного средства может определять, что колеса 102 находятся на их соответствующих местах (т.е. прикреплены к транспортному средству 104). Однако, если мощность сигнала данного приемопередатчика 203 колеса начинает снижаться с каждой новой передачей, система 200 транспортного средства может определять, что соответствующее колесо 102 снято с транспортного средства 104 и перемещается в направлении от транспортного средства 104.
В вариантах выполнения каждый приемопередатчик 230 колеса также может передавать вместе с информацией о мощности сигнала идентификационную информацию, присвоенную приемопередатчику 203 колеса. Идентификационная информация может быть использована центральным приемопередатчиком 212, TPMS 218 и/или другим компонентом VCS 216 для сопоставления принятой информации о мощности сигнала с соответствующим приемопередатчиком 203 колеса и/или модулем 202 колеса. В некоторых вариантах выполнения идентификационная информация может включать в себя уникальный идентификатор и/или ключ сеанса, который аутентифицирует приемопередатчик 203 колеса для центрального приемопередатчика 212. В некоторых случаях центральный приемопередатчик 212 может включать соответствующий уникальный идентификатор или другую информацию о сеансе в беспроводные сигналы, передаваемые данному приемопередатчику 203 колеса для демонстрации того, что передача действительна или авторизована.
В некоторых вариантах выполнения каждый из приемопередатчиков 203 колес может представлять собой маломощный беспроводной приемопередатчик дальнего радиуса действия, выполненный с возможностью периодической передачи беспроводных сигналов с низкой скоростью передачи в битах и/или приема беспроводных сигналов от центрального приемопередатчика 212. Например, в некоторых случаях приемопередатчики 203 колес могут быть выполнены с возможностью передачи беспроводного сигнала, содержащего информацию о давлении в шинах, информацию о мощности сигнала и идентификационную информацию, центральному приемопередатчику 212 каждые несколько секунд или в течение другого заданного периода времени. В предпочтительном варианте выполнения приемопередатчики 203 колес представляют собой работающие на аккумуляторах приемопередатчики глобальной сети дальнего радиуса действия (LoRaWAN), выполненные с возможностью осуществления двунаправленной связи в течение запланированных временных интервалов и работающие в пределах заданной низкочастотной полосы (например, 915 МГц в Северной Америке) с многолетним сроком службы аккумулятора (например, 7-9 лет) и диапазоном беспроводной передачи, который охватывает несколько миль (например, радиус 5-7 миль). В некоторых вариантах выполнения центральный приемопередатчик 212 также представляет собой приемопередатчик LoRaWAN, и во время нормальной работы приемопередатчики 203 колес и центральный приемопередатчик 212 выполнены с возможностью формирования локальной сети LoRaWAN в пределах транспортного средства 104. Например, центральный приемопередатчик 212 может служить в качестве шлюзовой или базовой станции локальной сети, а приемопередатчики 203 колес могут служить в качестве узлов или конечных устройств, выполненных с возможностью периодического приема или восприятия маячкового сигнала или другой передачи по нисходящему каналу связи от шлюза и передачи сообщений по восходящему каналу связи в течение предварительно назначенных временных интервалов или другого периодического интервала. В таких случаях VCS 216 системы 200 транспортного средства может служить в качестве внутренней инфраструктуры или сетевого сервера, который управляет работой локальной сети LoRaWAN и/или процессами передачи данных центральному приемопередатчику 212 приемопередатчиком 203 колеса.
В вариантах выполнения каждое из соседних транспортных средств 110 может включать в себя систему транспортного средства (например, систему 302 транспортного средства, показанную на Фиг. 3), которая подобна системе 200 транспортного средства, для обеспечения отслеживания собственных колес и/или колес, снятых с другого транспортного средства, например, колес 102, показанных на Фиг. 1. Например, как показано на Фиг. 1, каждое из соседних транспортных средств 110 может включать в себя центральный приемопередатчик 112, который подобен центральному беспроводному приемопередатчику 212, показанному на Фиг. 2 и описанному в настоящем документе. В некоторых случаях центральные приемопередатчики 112 могут представлять собой приемопередатчики LoRaWAN, как центральный приемопередатчик 212. Кроме того, колеса каждого из соседних транспортных средств 110 могут включать в себя модули колес (не показаны), которые подобны модулям 202 колес, показанным на Фиг. 2 и описанным в настоящем документе.
В вариантах выполнения система 200 транспортного средства может быть выполнена с возможностью обнаружения несанкционированного снятия или кражи данного колеса 102 на основе информации о мощности сигнала, принимаемой от модулей 202 колес через центральный приемопередатчик 212, и в ответ на указанное обнаружение запроса соседних транспортных средств 110 на отслеживание украденного колеса 102 с использованием их собственных центральных беспроводных приемопередатчиков 112. В таких случаях приемопередатчики 203 колес системы 200 транспортного средства могут быть выполнены с возможностью связи не только с центральным приемопередатчиком 212, но и с другими совместимыми беспроводными устройствами, такими как, например, центральные приемопередатчики 112, встроенные в соседние транспортные средства 110, для обеспечения отслеживания украденных колес 102. Например, при обнаружении системой 200 транспортного средства снятия данного колеса 102 с основного транспортного средства 104, приемопередатчики 203, 212 и 112 могут быть выполнены с возможностью формирования сети LoRaWAN, в которой приемопередатчики 203 колес работают в качестве сетевых узлов, а центральный приемопередатчик 112 в каждом соседнем транспортном средстве 110 работает в качестве шлюзового устройства, подобно центральному приемопередатчику 212 основного транспортного средства 104. С помощью этой сети LoRaWAN центральные приемопередатчики 112 соседних транспортных средств 110 могут выполнять поиск и обнаружение приемопередатчиков 203 колес, встроенных в украденные колеса 102, и передавать информацию об обнаруженных приемопередатчиках 203 центральному приемопередатчику 212 основного транспортного средства 104.
Как показано на Фиг. 2, в некоторых вариантах выполнения процессор 220 данных, встроенный в VCS 216, может быть выполнен с возможностью выполнения программного обеспечения, сохраненного в устройстве 222 хранения данных VCS 216, например, приложения 224 для обнаружения кражи, для реализации технологий отслеживания колес, описанных в настоящем документе. В некоторых вариантах выполнения процессор 220 и устройство 222 хранения данных могут составлять часть TPMS 218. В других вариантах выполнения процессор 220 и устройство 222 хранения данных могут быть встроены в другой модуль управления VCS 216. В любом случае приложение 224 для обнаружения кражи может включать в себя компьютерные программные инструкции, которые при выполнении процессором 220 побуждают процессор 220 к приему от центрального приемопередатчика 212 информации о мощности сигнала, передаваемой приемопередатчиками 203 колес; обнаружению снятого колеса 102 с транспортного средства 104 на основе информация о снижении мощности сигнала, принимаемой от соответствующего приемопередатчика 203 колеса; в ответ генерирования уведомления о снятии, содержащей запрос на отслеживание приемопередатчика 203 снятого колеса 102; и передачу уведомления о снятии соседним транспортным средствам 110, например, с использованием телематического блока 226 управления (TCU) VCS 216. В вариантах выполнения TCU 226 может быть выполнен с возможностью связи с соседними транспортными средствами 110 по сети беспроводной связи (такой как, например, сеть 304 беспроводной связи, показанная на Фиг. 3). Подобным образом соседние транспортные средства 110 могут принимать уведомление о снятии через телематические блоки транспортных средств (не показаны), встроенные в их собственные системы транспортных средств.
В вариантах выполнения уведомление о снятии может включать в себя инструкции для обнаружения приемопередатчика 203 колеса, встроенного в снятое колесо 102, и получения текущей информации о мощности сигнала от него. Уведомление о снятии также может включать в себя идентификационную информацию, связанную с приемопередатчиком 203 снятого колеса, так что центральные приемопередатчики 112 могут обнаруживать соответствующий приемопередатчик 203 колеса. Например, в ответ на прием уведомления о снятии каждое из соседних транспортных средств 110 может настраивать свои центральные приемопередатчики 112 на поиск или восприятие беспроводного устройства, имеющего идентификационную информацию, включенную в запрос. В то же время приемопередатчик 203 снятого колеса может продолжать периодически передавать беспроводной сигнал, содержащий информацию о давлении в шине, текущую информацию о мощности сигнала и связанную с ним идентификационную информацию. В результате каждое соседнее транспортное средство 110, находящееся в пределах диапазона беспроводной передачи приемопередатчика 203 снятого колеса, может принимать беспроводной сигнал, передаваемый снятым беспроводным приемопередатчиком 203. После определения соответствия идентификационной информации, включенной в принятый беспроводной сигнал, идентификационной информации, включенной в запрос, соседние транспортные средства 110 могут передавать текущую информацию о мощности сигнала, включенную в принятый беспроводной сигнал, основному транспортному средству 104, как запрошено в уведомлении о снятии.
В некоторых вариантах выполнения процессор 220 данных и/или приложение 224 для обнаружения кражи могут быть дополнительно выполнены с возможностью определения предполагаемого местоположения снятого колеса 102 на основе текущей информации о мощности сигнала, получаемой от приемопередатчика 203 снятого колеса соседними транспортными средствами 110. Например, при выполнении приложения 224 для обнаружения кражи процессор 220 данных может быть выполнен с возможностью определения местоположения приемопередатчика 203 снятого колеса методом триангуляции на основе текущей информации о мощности сигнала, получаемой по меньшей мере тремя соседними транспортными средствами 110, которая может быть использована для вычисления расстояния между приемопередатчиком 203 снятого колеса и каждым из трех соседних транспортных средств 110, и дополнительно на основе информации о географическом местоположении каждого из трех соседних транспортных средств 110 во время приема беспроводного сигнала от приемопередатчика 103 снятого колеса. В некоторых случаях информация о географическом местоположении может представлять собой данные или координаты системы глобального позиционирования (GPS) (например, значения долготы и широты), полученные через GPS-приемник (не показан), встроенный в систему соответствующего соседнего транспортного средства 110.
В некоторых вариантах выполнения каждое из соседних транспортных средств 110 может продолжать отслеживать или воспринимать сигналы от приемопередатчика 203 снятого колеса и обеспечивать текущую информацию о мощности сигнала, передаваемую приемопередатчиком 203 снятого колеса, основному транспортному средству 104, пока соседнее транспортное средство 110 остается в пределах диапазона беспроводной передачи приемопередатчика 203. Однако, как только данное соседнее транспортное средство 110 покидает этот диапазон беспроводной передачи, транспортное средство 110 может прекращать отслеживать приемопередатчик 203 снятого колеса и может настраивать свой центральный приемопередатчик 112 на возобновление нормальной работы (например, отслеживание информации о давлении в шине и мощности сигнала для каждого из его собственных колес).
В вариантах выполнения система 200 транспортного средства может быть выполнена с возможностью уведомления с использованием TCU 226 владельца транспортного средства, государственного органа (например, полиции), сервисного центра, предложенного производителем транспортного средства, или другого объекта о несанкционированном снятии одного или более колес 102 с транспортного средства 104 и/или предполагаемом местоположении снятых колес 102. Если предполагаемое местоположение изменяется, или если система 200 транспортного средства принимает новую информацию от соседних транспортных средств 110, система 200 транспортного средства может передавать обновленные уведомления для содействия обнаружению снятых колес 102. В некоторых случаях система 200 транспортного средства может продолжать отслеживать снятые колеса 102 с помощью соседних транспортных средств 110 до тех пор, пока снятые колеса 102 не будут найдены, пока соседние транспортные средства 110 могут определять местоположение снятых колес 102, и/или пока система транспортного средства 200 не примет команду завершения отслеживания колес 102.
Дополнительно обратимся к Фиг. 3, на которой показана примерная беспроводная система 300, содержащая систему 200 транспортного средства, встроенную в основное транспортное средство 104, и множество систем 302 транспортных средств, которые соответственно встроены в соседние транспортные средства 110. Каждая из систем 302 транспортных средств может быть по существу подобна системе 200 транспортного средства, показанной на Фиг. 2 и описанной в настоящем документе. Например, каждая из систем 302 транспортных средств включает в себя центральный приемопередатчик 112, показанный на Фиг. 1, и модули колес, установленные внутри колес соответствующего соседнего транспортного средства 110, причем каждый модуль колеса включает в себя приемопередатчик колеса, выполненный с возможностью передачи информации о давлении в шинах и мощности сигнала центральному приемопередатчику 112. Каждая система 302 транспортного средства также включает в себя вычислительную систему транспортного средства (VCS), которая коммуникативно связана с центральным приемопередатчиком 112 и содержит по меньшей мере процессор данных для выполнения программного обеспечения, устройство хранения данных для хранения программного обеспечения и других данных и телематический блок управления (TCU) для обеспечения беспроводной связи.
Как показано, системы 200 и 302 транспортных средств выполнены с возможностью беспроводной связи друг с другом и/или с удаленным сервером 306 по сети 304 беспроводной связи (также называемой в настоящем документе «беспроводной сетью»). В вариантах выполнения системы 200 и 302 транспортных средств могут подключаться к беспроводной сети 304 с использованием телематического блока управления, встроенного в каждую из систем 200 и 302. В некоторых случаях системы 200 и 302 транспортных средств могут осуществлять связь друг с другом непосредственно по беспроводной сети 304, например, с использованием технологии LoRaWAN и/или технологии специализированной связи на коротких расстояниях (DSRC). В других случаях системы 200 и 302 транспортного средства могут осуществлять связь друг с другом через удаленный сервер 306, включенный в беспроводную систему 300. Например, каждая из систем 200 и 302 транспортных средств может быть выполнена с возможностью оправки беспроводных сигналов удаленному серверу 306 с использованием TCU, встроенного в нее, а удаленный сервер 306 может быть выполнен с возможностью пересылки беспроводного сигнала соответствующей системе 200, 302 транспортного средства.
Беспроводная сеть 304 может включать в себя сети беспроводной связи одного или более различных типов, включая, например, сети доступа к Интернет (например, LoRaWAN, Wi-Fi, WLAN, WMAN, WWAN и т.д.), беспроводные персональные сети (WPAN) (например, Bluetooth, Zigbee, сеть инфракрасной связи и т.д.), сети цифровой сотовой связи (например, LTE, LTE-Advanced, GSM, CDMA, GPRS, 3G и т.д.), сети спутниковой связи (например, система глобального позиционирования (GPS)) и сети связи на коротких расстояниях (например, DSRC, радиочастотная идентификация (RFID), коммуникация ближнего поля (NFC) и т.д.). В некоторых случаях для реализации беспроводной системы 304 могут быть использованы технологии беспроводной связи двух или более различных типов. Например, первая сеть связи может быть использована для связи между удаленным сервером 306 и каждой из систем 200 и 302 транспортных средств, а вторая сеть связи может быть использована для связи между каждой из систем 200 и 302 транспортных средств.
В вариантах выполнения удаленный сервер 306 может представлять собой облачное вычислительное устройство или может быть включен в облачную вычислительную сеть, оба из которых могут находиться под управлением и/или быть связаны с производителем транспортных средств. В некоторых вариантах выполнения между VCS каждой системы 200, 302 транспортного средства и удаленным сервером 306 может быть предварительно установлен безопасный канал беспроводной связи для обеспечения прямой связи между системой 200, 302 транспортного средства и сервером 306 без необходимости сопряжения или авторизации перед каждым сеансом связи. Безопасный канал связи может быть установлен или может находиться под контролем производителя транспортных средств. В некоторых случаях удаленный сервер 306 принимает и сохраняет данные GPS для транспортных средств 104, 110 от сервера GPS и передает данные GPS системам 200, 302 транспортных средств.
В некоторых вариантах выполнения беспроводная система 300 работает в качестве распределенной системы транспортных средств, которая связывает вместе системы 200 и 302 транспортных средств, наряду с удаленным сервером 306, посредством беспроводной сети 304 для обеспечения отслеживания колес, снятых с любого из транспортных средств 104 и 110. Например, беспроводная сеть 304 может включать в себя облачную вычислительную сеть, находящуюся под управлением и/или связанную с общим производителем транспортных средств 104 и 110. В таких случаях беспроводная система 300 может включать в себя все системы транспортных средств, связанные с одним производителем транспортных средств, и любая система транспортного средства, которая находится в пределах диапазона беспроводной передачи приемопередатчиков 203 колес, снятых с транспортного средства 104, может быть использована для отслеживания приемопередатчиков 203. В некоторых вариантах выполнения для выполнения технологий определения местоположения колес 102, снятых с транспортного средства 104, методом триангуляции необходимо по меньшей мере три системы транспортных средств. В таких случаях беспроводная система 300 может быть выполнена с возможностью идентификации и выбора систем по меньшей мере трех ближайших транспортных средства (например, соседних транспортных средств 110, показанных на Фиг. 1) с целью отслеживания колес 102. В некоторых случаях беспроводная система 300 может заменять одну из систем 302 транспортных средств другой совместимой системой транспортного средства, как только соответствующее соседнее транспортное средство 102 покидает диапазон действия приемопередатчиков 203 колес.
Во время нормальной работы беспроводной системы 300 центральные приемопередатчики 112 и 212, встроенные в системы 302 и 200 транспортных средств, фокусируют свои связи на приемопередатчиках колес, встроенных в их соответствующие модули колес, например, для получения информации о давлении в шинах и мощности сигнала, как описано выше. Как также описано выше, при обнаружении кражи колес, например, системой 200 транспортного средства, система 200 транспортного средства может начинать трансляцию уведомления о снятии, запрашивающего другие системы 302 транспортных средств в беспроводной системе 300 об отслеживании снятых колес. Эта трансляция может инициировать режим отслеживания колес беспроводной системы 300.
В вариантах выполнения система 200 транспортного средства может периодически транслировать уведомление о снятии (например, раз в секунду или минуту), так что каждая система 302 транспортного средства, находящаяся в пределах беспроводной системы 300, имеет возможность приема трансляции. Например, во время первоначальной трансляции одна или более систем 302 транспортных средств могут не находиться в режиме восприятия или не быть настроенными на прием трансляции, поскольку сама система (системы) 302 транспортного средства может находиться в режиме передачи или быть занята иным образом. После приема уведомления о снятии системы 302 транспортных средств могут настраивать центральные приемопередатчики 112, встроенные в них, на поиск или восприятие приемопередатчиков 203 снятых колес 102 с использованием идентификационной информации, включенной в уведомление о снятии. В некоторых случаях может быть необходимо, чтобы системы 302 транспортных средств активировали или включили свои центральные приемопередатчики 112 для инициации режима отслеживания колес, например, если центральные приемопередатчики 112 не находятся в режиме восприятия или не настроены на прием сообщений.
В вариантах выполнения приемопередатчики 203 колес в снятых колесах 102 могут игнорировать их снятие с транспортного средства 104 и могут продолжать передавать или транслировать беспроводной сигнал, содержащий текущую информацию о давлении в шинах и мощности сигнала, а также идентификационную информацию, связанную с соответствующим приемопередатчиком 203. Соответственно, любой центральный приемопередатчик 112, находящийся в пределах диапазона беспроводной связи приемопередатчиков 203 снятых колес, может принимать беспроводные сигналы, транслируемые приемопередатчиками 203 снятых колес. При обнаружении приемопередатчиков 203 снятых колес центральные приемопередатчики 112 могут сообщать текущую информацию о мощности сигнала, включенную в беспроводной сигнал, принимаемый от приемопередатчиков 203, системе 200 транспортного средства и/или удаленному серверу 306 по беспроводной сети 304. В некоторых вариантах выполнения центральные приемопередатчики 112 могут быть выполнены с возможностью продолжать нормальную работу (например, отслеживание информации о давлении в шинах и мощности сигнала своих собственных колес), при этом также работая в режиме отслеживания колес.
В некоторых вариантах выполнения удаленный сервер 306 может быть выполнен с возможностью приема текущей информации о мощности сигнала от каждой из систем 302 транспортных средств и вычисления предполагаемого местоположения снятых колес 102 на ее основе. Например, в таких случаях удаленный сервер 306 может быть выполнен с возможностью выполнения программного приложения для определения местоположения колес 102 методом триангуляции с использованием принимаемой информации о мощности сигнала и информации о географическом местоположении (например, данных GPS) для каждой из систем 302 транспортных средств. Удаленный сервер 306 может быть дополнительно выполнен с возможностью передачи предполагаемого местоположения основному транспортному средству 104 и/или государственному органу или другому объекту, участвующему в поиске снятых колес 102.
В вариантах выполнения каждая из систем 200 и 302 транспортных средств может включать в себя программное обеспечение для выполнения режима отслеживания колес беспроводной системы 300. Например, как показано на Фиг. 2, система 200 транспортного средства включает в себя приложение 224 для обнаружения кражи, сохраненное в устройстве 222 хранения данных VCS 216, для отслеживания колес 102, снятых с транспортного средства 104. Каждая из систем 302 транспортных средств также может включать в себя подобное приложение для обнаружения кражи, сохраненное в устройстве хранения данных соответствующей VCS. В некоторых вариантах выполнения часть приложения 224 для обнаружения кражи хранится на удаленном сервере 306, показанном на Фиг. 3, например, для содействия оценке текущего местоположения снятых колес 102 на основе текущей информации о мощности сигнала, получаемой от соответствующих приемопередатчиков 203 колес. В других вариантах выполнения удаленный сервер 306 хранит одно или более программных приложений, выполненных с возможностью обеспечения взаимодействия удаленного сервера 306 с приложениями 224 для обнаружения кражи систем 200 и 302 транспортных средств, передачи информации, например, данных GPS и/или текущей информации о мощности сигнала, принимаемой от других систем 302 транспортных средств, системе 200 транспортного средства и/или выполнения других операций, связанных с реализацией режима отслеживания колес беспроводной системы 300.
Снова обратимся к Фиг. 2, VCS 216 может быть встроена в систему 200 транспортного средства, например, в рамках системы электроники транспортного средства или информационно-развлекательной системы транспортного средства 104, в соответствии с вариантами выполнения. VCS 216 может представлять собой информационно-развлекательную систему, например, систему SYNC®, разработанную компанией FORD MOTOR COMPANY®. Другие варианты выполнения VCS 216 могут включать в себя другие компоненты, меньшее количество компонентов или дополнительные компоненты по сравнению с компонентами, описанными ниже и показанными на Фиг. 2.
Как показано на Фиг. 2, VCS 216 может включать в себя процессор 220 данных (например, электронный процессор данных), устройство 222 хранения данных и шину 228 передачи данных транспортного средства (например, шину локальной сети контроллеров (CAN)). VCS 216 может дополнительно включать в себя различные электронные блоки управления (ECU), которые отвечают за контроль и управление электрическими системами или подсистемами транспортного средства 104, как описано более подробно ниже. Каждый ECU может включать в себя, например, одно или более устройств ввода и устройств вывода для сбора, приема и/или передачи данных, память для хранения данных и процессор для обработки данных и/или генерирования новой информации на ее основе. В проиллюстрированном варианте выполнения ECU VCS 216 включают в себя TPMS 218, TCU 226 и множество других ECU 230, включая, например, модуль управления кузовным оборудованием (BCM) для управления и контроля различных электронных устройств в кузове транспортного средства 104, модуль управления силовым агрегатом (PCM) для управления и контроля двигателя и коробки передач транспортного средства 104, человеко-машинный интерфейс (HMI) для обеспечения взаимодействия пользователя с транспортным средством 104 и для представления информации транспортного средства оператору транспортного средства.
В вариантах выполнения ECU VCS 216 взаимно соединены шиной 228 передачи данных транспортного средства для обмена данными между различными ECU, а также другим транспортным средством и/или вспомогательными компонентами, находящимися в сообщении с VCS 216. Кроме того, процессор 220 данных может осуществлять связь с любым из ECU и устройством 222 хранения данных по шине 228 передачи данных для выполнения одной или более функций и/или поддержания взаимодействий с центральным приемопередатчиком 212, удаленным сервером 306 и/или системами 302 транспортных средств, включая связанные со способом 400, показанным на Фиг. 4.
Система 218 контроля давления в шинах (TPMS) представляет собой ECU для контроля давления в шине каждого из колес 102 транспортного средства 102 и оповещения владельца транспортного средства о падении давления в шине данного колеса 102 ниже порогового уровня. В некоторых вариантах выполнения TPMS 218 также может быть выполнена с возможностью контроля информации о мощности сигнала, передаваемой приемопередатчиками 203 колес 102, обнаружения снятия одного из колес 102 с транспортного средства 104 с использованием технологий, описанных в настоящем документе, и отслеживания снятых колес 102 с использованием текущей информации о мощности сигнала, принимаемой от одного или более соседних транспортных средств. В других вариантах выполнения отдельный модуль управления VCS 216 может быть выполнен с возможностью контроля снятого колеса и отслеживания снятого колеса с использованием технологий, описанных в настоящем документе.
Телематический блок 226 управления (TCU) представляет собой ECU для обеспечения подключения системы 200 транспортного средства к различным беспроводным сетям, включая, например, GPS, WiFi, сеть сотовой связи, Bluetooth, NFC, RFID, сеть спутниковой связи и/или сеть инфракрасной связи. В вариантах выполнения TCU 226 может быть выполнен с возможностью подключения системы 200 транспортного средства к сети 306 беспроводной связи, показанной на Фиг. 3. Как показано, TCU 226 (также называемый «телематическим блоком транспортного средства») включает в себя модуль 232 беспроводной связи, содержащий одну или более антенн, радиоприемников, модемов, приемников и/или передатчиков (не показаны) для подключения к различным беспроводным сетям. Например, модуль 232 беспроводной связи может включать в себя блок мобильной связи (не показан) для беспроводной связи по сети сотовой связи (например, GSM, GPRS, LTE, 3G, 4G, CDMA и т.д.), сети стандарта 802.11 (например, WiFi), сети стандарта WiMAX; и/или сети спутниковой связи. TCU 232 также может быть выполнен с возможностью управления отслеживанием транспортного средства 104 с использованием значений широты и долготы, получаемых от спутника GPS.
В вариантах выполнения TCU 226 принимает внешние данные через модуль 232 беспроводной связи и передает внешние данные соответствующему ECU VCS 216 и/или процессору 220 данных. Внешние данные могут включать в себя, например, текущую информацию о мощности сигнала, получаемую от приемопередатчиков 203 колес системами 302 транспортных средств, или предполагаемое местоположение снятых колес 102, вычисленное удаленным сервером 306. В некоторых вариантах выполнения TCU 226 также принимает внутренние данные от других ECU VCS 216 и/или процессора 220 данных с инструкциями для передачи внутренних данных удаленному серверу 306, показанному на Фиг. 3, одной или более системам 302 транспортных средств, другому компоненту беспроводной системы 300 или государственному органу или другому объекту, участвующему в отслеживании снятых колес 102. Внутренние данные могут включать в себя, например, предполагаемое местоположение снятых колес 102, вычисленное процессором 220 данных, или уведомление о снятии, сгенерированное процессором 220 данных для запроса систем 302 транспортных средств о содействии отслеживанию снятых колес 102.
В некоторых вариантах выполнения модуль 232 беспроводной связи может быть выполнен с возможностью беспроводной связи по двум или более сетям для обеспечения непрерывности сетевого доступа, например, в случае выхода из строя одной из сетей или нахождения вне ее диапазона. Кроме того, внешние данные могут быть приняты различными приемниками модуля 232 беспроводной связи в зависимости от технологии беспроводной связи, используемой для передачи данных. Например, в некоторых случаях данные, передаваемые другими системами 302 транспортных средств непосредственно системе 200 транспортного средства, могут быть приняты DSRC-приемником (не показан) модуля 232 беспроводной связи. В качестве другого примера данные, передаваемые удаленным сервером 306 системе 200 транспортного средства, могут быть приняты приемником сотовой связи или WiFi-приемником (не показаны) модуля 232 беспроводной связи. В дополнение, данные могут передаваться между TCU 232 и центральным приемопередатчиком 212 с использованием приемопередатчика связи на коротких расстояниях (не показан), встроенного в модуль 232 беспроводной связи, или по проводному соединению между VCS 216 и центральным приемопередатчиком 212.
Процессор 220 данных может содержать одно или более из микропроцессора, микроконтроллера, программируемой логической матрицы, интегральной схемы специального назначения, логического устройства или другого электронного устройства для обработки, ввода, вывода, управления, хранения или извлечения данных. В вариантах выполнения процессор 220 данных может быть выполнен с возможностью выполнения программного обеспечения, сохраненного в устройстве 222 хранения данных (например, в электронной памяти), например, приложения 224 для обнаружения кражи, которое показано на Фиг. 2. В некоторых вариантах выполнения VCS 216 может содержать компьютер общего назначения, который запрограммирован различными программными инструкциями или модулями, сохраненными в устройстве 222 хранения данных или в другом месте.
Устройство 222 хранения данных может содержать одно или более из электронной памяти, энергонезависимого оперативного запоминающего устройства (например, RAM), памяти на триггерах, записываемого компьютером или считываемого компьютером носителя данных, магнитного или оптического устройства хранения данных, накопителя на магнитных или оптических дисках, жесткого диска или другого электронного устройства для хранения, извлечения, чтения или записи данных. Устройство 222 хранения данных может хранить один или более программных модулей или программных инструкций для выполнения процессором 220 данных. Например, как показано на Фиг. 2, устройство 222 хранения данных может хранить все или часть приложения 224 для обнаружения кражи.
Фиг. 4 иллюстрирует пример способа 400 отслеживания колеса, снятого с транспортного средства, без разрешения или допуска владельца транспортного средства в соответствии с вариантами выполнения. В качестве примера способ 400 может быть реализован по меньшей мере частично процессором (например, процессором 220 данных) вычислительного устройства, выполняющего программное приложение (например, приложение 224 для обнаружения кражи), сохраненное в памяти (например, в устройстве 224 хранения данных) вычислительного устройства. В некоторых вариантах выполнения способ 400 может быть выполнен системой транспортного средства, например, системой 200 транспортного средства или любой из систем 302 других транспортных средств, включенных в беспроводную систему 300, показанную на Фиг. 3, или, в частности, одним или более вычислительными устройствами, встроенными в нее, например, одним или более компонентами вычислительного устройства 216 транспортного средства, показанного на Фиг. 2. Кроме того, система транспортного средства может взаимодействовать с одним или более компонентами беспроводной системы 300 для выполнения этапов способа 400, например, с удаленным сервером 306 и/или системами 302/200 других транспортных средств. В других вариантах выполнения способ 400 может быть выполнен более чем одним компонентом беспроводной системы 300, например, системой 200 транспортного средства и удаленным сервером 306, или, в частности, одним или более вычислительными устройствами, встроенными в каждый компонент.
Как показано на Фиг. 4, способ 400 начинается на этапе 402, на котором один или более процессоров получают информацию о давлении в шинах и мощности сигнала от каждого из множества беспроводных приемопередатчиков (например, от приемопередатчиков 203 колес, показанных на Фиг. 2), соответственно связанных с множеством колес (например, с колесами 102, показанными на Фиг. 1) транспортного средства (например, транспортного средства 104, показанного на Фиг. 1). В вариантах выполнения процессор может получать информацию о давлении в шинах и мощности сигнала от центрального приемопередатчика (например, центрального приемопередатчика 212, показанного на Фиг. 2), который коммуникативно связан с множеством беспроводных приемопередатчиков и вычислительной системой транспортного средства. Например, каждое колесо может включать в себя датчик давления в шине (например, датчики 214 давления в шинах, показанные на Фиг. 2), который коммуникативно связан с беспроводным приемопередатчиком, также встроенным в него. Датчик давления в шине может передавать информацию о давлении в шине беспроводному приемопередатчику для передачи в систему контроля давления в шинах (TPMS) (например, TPMS 218, показанную на Фиг. 2), встроенную в вычислительную систему транспортного средства. Беспроводной приемопередатчик может измерять или определять информацию о мощности сигнала и передавать беспроводной сигнал, содержащий информацию о давлении в шинах и информацию о мощности сигнала, центральному приемопередатчику. Процессор может принимать беспроводной сигнал через телематический блок управления (TCU) (например, TCU 226, показанный на Фиг. 2) вычислительной системы транспортного средства или непосредственно от центрального приемопередатчика, например, по проводному соединению. После приема беспроводного сигнала процессор может передавать информацию одному или более другим компонентами VCS, например, системе контроля давления в шинах. В некоторых случаях беспроводной сигнал, принимаемый от каждого беспроводного приемопередатчика, также включает в себя идентификационную информацию (например, идентификатор или ключ сеанса), которая однозначно связана с беспроводным приемопередатчиком.
Как показано на Фиг. 4, способ 400 дополнительно включает в себя этап 404, на котором один или более процессоров обнаруживают снятие одного из колес с транспортного средства на основе информации о мощности сигнала, получаемой от беспроводного приемопередатчика, встроенного в снятое колесо. В вариантах выполнения процессор обнаруживает снятие одного из колес при обнаружении снижения мощности сигнала беспроводного приемопередатчика снятого колеса, по сравнению с предыдущим измерением мощности сигнала или базовым измерением, установленным во время нормальной работы. В некоторых вариантах выполнения обнаружение снятия колеса дополнительно включает в себя определение, указывает ли снижение мощности сигнала увеличение расстояния между снятым колесом и транспортным средством. Например, процессор может периодически принимать информацию о мощности сигнала от соответствующего приемопередатчика колеса (например, каждые 1-5 секунд) и переводить каждый набор вновь принятой информации о мощности сигнала в расстояние между приемопередатчиком и транспортным средством. Если расстояние, вычисленное в данное время, превышает пороговое значение (например, 1 метр), процессор может начинать определять оценочные расстояния с течением времени или иным образом анализировать периодически обновляемую информацию о расстоянии для определения, увеличивается ли расстояние между приемопередатчиком колеса и транспортным средством, уменьшается или остается по существу неизменным. В некоторых случаях процессор может использовать периодически обновляемые расчеты расстояния и/или соответствующую информацию о географическом местоположении для измерения темпа изменения скорости приемопередатчика колеса. Если темп изменения скорости превышает пороговое значение, процессор может определять, что колесо перемещается в направлении от транспортного средства и, следовательно, обнаруживать снятие колеса с транспортного средства.
На этапе 406 один или более процессоров генерируют уведомление о снятии, содержащее запрос на отслеживание беспроводного приемопередатчика снятого колеса. В вариантах выполнения уведомление о снятии включает в себя инструкции для определения местоположения беспроводного приемопередатчика, встроенного в снятое колесо, и получение текущей информации о мощности сигнала от него. В некоторых вариантах выполнения уведомление о снятии дополнительно включает в себя идентификационную информацию, связанную с каждым из приемопередатчиков снятых колес. На этапе 408 один или более процессоров передают или иным образом обеспечивают уведомление о снятии одному или более соседним транспортных средствам (например, соседним транспортным средствам 110, показанным на Фиг. 1), находящимся в пределах диапазона беспроводной передачи беспроводного приемопередатчика, встроенного в снятое колесо. Например, процессор может выдавать инструкцию телематическому блоку управления (TCU) (например, TCU 226, показанному на Фиг. 1), встроенному в вычислительную систему транспортного средства, для трансляции уведомления о снятии всем соседним транспортным средствам непосредственно или передачи уведомления о снятии удаленному серверу для пересылки соседним транспортным средствам.
В вариантах выполнения, как только данное соседнее транспортное средство обнаруживает приемопередатчики снятых колес, например, с использованием идентификационной информации, связанной с приемопередатчиком, в качестве руководства, система данного соседнего транспортного средства может начинать воспринимать или иным образом принимать беспроводной сигнал, передаваемый приемопередатчиками снятых колес и содержащий текущую информацию о мощности сигнала для них. Например, соседние транспортные средства могут настраивать центральный приемопередатчик (например, центральный приемопередатчики 112, показанный на Фиг. 1), включенный в их собственные системы транспортных средств, на прием беспроводного сигнала, передаваемого приемопередатчиками снятых колес (например, с использованием идентификационной информации, включенной в уведомление о снятии). Затем соседние транспортные средства могут передавать принятую информацию в систему транспортного средства, которая отправила уведомление о снятии, и/или на удаленный сервер, включенный в беспроводную систему.
Как показано на Фиг. 4, способ 400 дополнительно включает в себя этап 410, на котором один или более процессоров определяют предполагаемое местоположение снятого колеса относительно одного или более соседних транспортных средств на основе текущей информации о мощности сигнала, получаемой от одного или более соседних транспортных средств. В вариантах выполнения определение предполагаемого местоположения снятого колеса может включать в себя непрерывный или периодической прием текущей информации о мощности сигнала, получаемой от приемопередатчиков снятых колес одним или более соседними транспортными средствами. В некоторых вариантах выполнения процессор принимает текущую информацию о мощности сигнала для снятых приемопередатчиков от по меньшей мере трех соседних транспортных средств, так что процессор имеет достаточно информации для определения местоположения снятого колеса методом триангуляции. Процессор может быть встроен в систему транспортного средства, в случае чего текущая информация о мощности сигнала принимается системой транспортного средства, или в удаленный сервер беспроводной системы, в случае чего текущая информация о мощности сигнала также принимается удаленным сервером.
В соответствии с вариантами выполнения этап 410 может дополнительно включать в себя прием информации о географическом местоположении для каждого из по меньшей мере трех соседних транспортных средств. Например, в некоторых случаях системы по меньшей мере трех соседних транспортных средств могут передавать текущую информацию о географическом местоположении указанных транспортных средств в процессор, наряду с текущей информацией о мощности сигнала, получаемой от приемопередатчиков снятых колес. В других случаях удаленный сервер может передавать текущую информацию о географическом местоположении соседних транспортных средств в процессор. В вариантах выполнения этап 410 также включает в себя определение местоположения снятого беспроводного приемопередатчика относительно по меньшей мере трех соседних транспортных средств методом триангуляции с использованием географических местоположений по меньшей мере трех соседних транспортных средств и получаемой текущей информации о мощности сигнала. Например, на основе текущей информации о мощности сигнала, принимаемой от каждого из соседних транспортных средств, процессор может вычислять расстояние между удаленным беспроводным приемопередатчиком и соответствующим соседним транспортным средством. С использованием этих расстояний и текущего географического местоположения каждого из по меньшей мере трех соседних транспортных средств процессор может оценивать местоположение приемопередатчиков снятых колес методом триангуляции с использованием известных технологий.
В некоторых вариантах выполнения способ 400 дополнительно включает в себя этап, на котором после приема уведомления о снятии, запрашивающего транспортное средство об отслеживании беспроводного приемопередатчика, встроенного в колесо, снятое с другого транспортного средства, выдают инструкцию центральному приемопередатчику, встроенному в транспортное средство, для обнаружения беспроводного сигнала, передаваемого снятым беспроводным приемопередатчиком, и получения информации о мощности сигнала от снятого беспроводного приемопередатчика. Таким образом, система транспортного средства может сама осуществлять содействие отслеживанию, которое она запрашивает от других соседних транспортных средств на этапах 406 и 408.
В некоторых вариантах выполнения любые описания процессов или блоки на фигурах, например, на Фиг. 4, могут представлять модули, сегменты или участки кода, которые включают в себя одну или более выполняемых инструкций для осуществления конкретных логических функций или этапов процесса. Любые альтернативные реализации включены в пределы объема охраны описанных в настоящем документе вариантов выполнения, в которых функции могут быть выполнены в порядке, отличном от показанного или рассмотренного порядка, включая по существу одновременный или обратный порядок, в зависимости от заложенных функциональных возможностей, которые будут понятны специалисту в области техники.
Следует подчеркнуть, что вышеописанные варианты выполнения, в частности, любые «предпочтительные» варианты выполнения, представляют собой возможные примеры реализаций, изложенные только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном варианте (вариантах) выполнения по существу без отклонения от замысла и принципов описанных в настоящем документе технологий. Все такие модификации должны быть включены в пределы объема охраны настоящего изобретения и защищены следующей далее формулой изобретения.



Система для предотвращения кражи колес с транспортного средства содержит колеса, включающие в себя беспроводные приемопередатчики, выполненные с возможностью периодической передачи идентификационной информации, связанной с ними; и процессор, коммуникативно связанный с приемопередатчиками и выполненный с возможностью: обнаружения снятия одного из колес на основе информации о мощности сигнала от приемопередатчика указанного снятого одного из колес, передачи идентификационной информации указанного одного из колес на соседние транспортные средства и обнаружения указанного одного из колес на основе информации от приемопередатчика указанного снятого одного из колес от одного или более из соседних транспортных средств, обеспечивающих обнаружение указанного одного из колес. Обеспечивается эффективное отслеживание колес, снятых с транспортного средства. 2 н. и 18 з.п. ф-лы, 4 ил.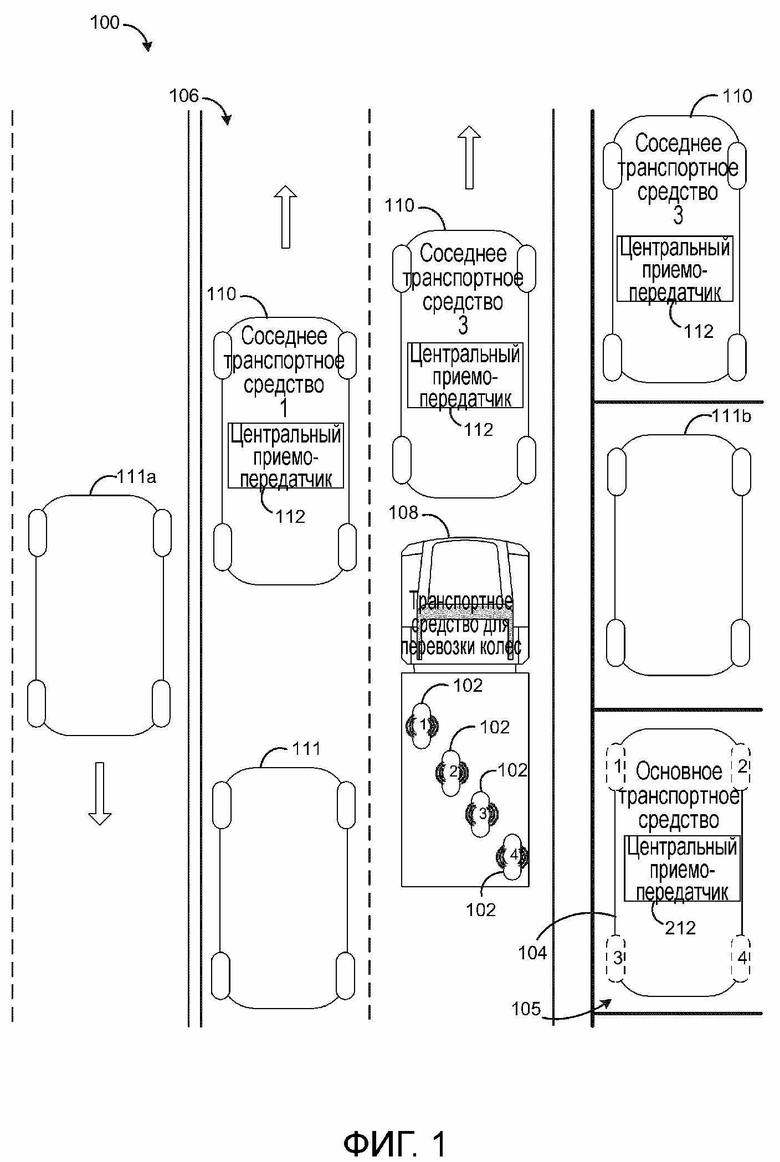
1. Система для предотвращения кражи колес с транспортного средства, содержащая:
колеса, включающие в себя беспроводные приемопередатчики, выполненные с возможностью периодической передачи идентификационной информации, связанной с ними; и
процессор, коммуникативно связанный с приемопередатчиками и выполненный с возможностью:
обнаружения снятия одного из колес на основе информации о мощности сигнала от приемопередатчика указанного снятого одного из колес,
передачи идентификационной информации указанного одного из колес на соседние транспортные средства и
обнаружения указанного одного из колес на основе информации от приемопередатчика указанного снятого одного из колес от одного или более из соседних транспортных средств, обеспечивающих обнаружение указанного одного из колес.
2. Система по п. 1, в которой колеса включают в себя датчики давления, причем беспроводные приемопередатчики выполнены с возможностью получения информации о давлении в шинах от датчиков давления.
3. Система по п. 2, в которой беспроводные приемопередатчики выполнены с возможностью периодической передачи процессору информации о давлении в шинах, информации о мощности сигнала и идентификационной информации, связанной с беспроводными приемопередатчиками.
4. Система по п. 1, дополнительно содержащая телематический блок, коммуникативно связанный с процессором,
причем процессор дополнительно выполнен с возможностью генерирования уведомления о снятии, содержащего запрос на отслеживание одного из беспроводных приемопередатчиков, соответствующего указанному одному из колес; и
телематический блок выполнен с возможностью передачи уведомления о снятии соседним транспортным средствам, причем одно или более из соседних транспортных средств находится в пределах диапазона беспроводной передачи указанного одного из беспроводных приемопередатчиков.
5. Система по п. 4, в которой уведомление о снятии включает в себя инструкции для обнаружения одного из беспроводных приемопередатчиков и получения текущей информации о мощности сигнала от указанного беспроводного приемопередатчика.
6. Система по п. 5, в которой процессор дополнительно выполнен с возможностью определения предполагаемого местоположения одного из колес на основе текущей информации о мощности сигнала, получаемой одним или более из соседних транспортных средств.
7. Система по п. 6, в которой телематический блок передает уведомление о снятии удаленному серверу для пересылки соседним транспортным средствам и дополнительно выполнен с возможностью приема от удаленного сервера текущей информации о мощности сигнала, получаемой одним или более из соседних транспортных средств.
8. Система по п. 6, в которой телематический блок передает уведомление о снятии непосредственно соседним транспортным средствам и дополнительно выполнен с возможностью приема от одного или более из соседних транспортных средств текущей информации о мощности сигнала, получаемой от одного из беспроводных приемопередатчиков.
9. Система по п. 5, в которой телематический блок передает уведомление о снятии удаленному серверу для пересылки соседним транспортным средствам и дополнительно выполнен с возможностью приема от удаленного сервера предполагаемого местоположения одного из беспроводных приемопередатчиков на основе текущей информации о мощности сигнала, получаемой одним или более из соседних транспортных средств.
10. Система по п. 1, в которой беспроводные приемопередатчики представляют собой приемопередатчики глобальной сети дальнего радиуса действия (LoRaWAN).
11. Система по п. 10, дополнительно содержащая центральный приемопередатчик для обеспечения сообщения между процессором и беспроводными примопередатчиками, причем центральный приемопередатчик представляет собой приемопередатчик LoRaWAN.
12. Система по п. 10, в которой после приема уведомления о снятии, запрашивающего транспортное средство об отслеживании первого беспроводного приемопередатчика, снятого с другого транспортного средства, процессор дополнительно выполнен с возможностью выдачи инструкции центральному приемопередатчику для обнаружения беспроводного сигнала, передаваемого первым беспроводным приемопередатчиком, и получения информации о мощности сигнала от первого беспроводного приемопередатчика.
13. Способ предотвращения кражи колес, при котором:
получают информацию о мощности сигнала давления в шинах и идентификационную информацию от беспроводных приемопередатчиков, присоединенных к колесам, установленным на транспортном средстве,
обнаруживают с использованием процессора снятие одного из колес на основе информации о мощности сигнала от приемопередатчика указанного снятого одного из колес,
передают идентификационную информацию указанного одного из колес на соседние транспортные средства и
обнаруживают указанное снятое колесо на основе информации от приемопередатчика указанного снятого одного из колес от одного или более из соседних транспортных средств, обеспечивающих обнаружение указанного одного из колес.
14. Способ по п. 13, при котором обнаруживают снижение мощности сигнала для одного из беспроводных приемопередатчиков, соответствующего указанному одному из колес.
15. Способ по п. 13, при котором дополнительно:
генерируют с использованием процессора уведомление о снятии, содержащее запрос на отслеживание одного из беспроводных приемопередатчиков, соответствующего указанному одному из колес; и
передают уведомление о снятии соседним транспортным средствам, причем одно или более из соседних транспортных средств находится в пределах диапазона беспроводной передачи одного из беспроводных приемопередатчиков.
16. Способ по п. 15, при котором уведомление о снятии включает в себя инструкции для обнаружения одного из беспроводных приемопередатчиков и получения текущей информации о мощности сигнала от него.
17. Способ по п. 16, при котором дополнительно определяют с использованием процессора предполагаемое местоположение одного из колес относительно одного или более из соседних транспортных средств на основе текущей информации о мощности сигнала, получаемой одним или более соседними транспортными средствами.
18. Способ по п. 17, при котором при определении предполагаемого местоположения:
принимают текущую информацию о мощности сигнала для одного из беспроводных приемопередатчиков от по меньшей мере трех соседних транспортных средств;
принимают информацию о географическом местоположении каждого из по меньшей мере трех соседних транспортных средств; и
определяют местоположение одного из беспроводных приемопередатчиков относительно по меньшей мере трех соседних транспортных средств методом триангуляции с использованием географических местоположений по меньшей мере трех соседних транспортных средств и получаемой текущей информации о мощности сигнала.
19. Способ по п. 18, при котором при определении предполагаемого местоположения дополнительно вычисляют расстояние между одним из беспроводных приемопередатчиков и каждым из по меньшей мере трех соседних транспортных средств на основе текущей информации о мощности сигнала, получаемой соответствующим соседним транспортным средством.
20. Способ по п. 13, при котором дополнительно после приема уведомления о снятии, запрашивающего транспортное средство об отслеживании первого беспроводного приемопередатчика, встроенного в колесо, снятое с другого транспортного средства, выдают инструкцию центральному приемопередатчику, встроенному в транспортное средство, для обнаружения беспроводного сигнала, передаваемого первым беспроводным приемопередатчиком, и получения информации о мощности сигнала от первого беспроводного приемопередатчика.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ТУРБИНА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2382205C1 |

