Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе контроля давления воздуха в шинах.
Уровень техники
[0002] В устройстве контроля давления воздуха или пневматического давления в шине, описанном в патентном документе 1, за счет передачи TPMS-данных (TPMS - система контроля давления воздуха в шинах) в момент времени, в который ускорение в направлении вращения TPMS-датчика, установленного на каждом колесе, достигает 1 [G] или -1 [G], TPMS-датчик передает TPMS-данные в постоянном угловом положении колеса. TPMSECU, установленный на стороне кузова транспортного средства, определяет положение колеса TPMS-датчика на основе числа зубцов, которое получается из цепочки импульсов скорости вращения колеса, обнаруженных посредством датчика скорости вращения колеса в момент времени, в который TPMS-данные были приняты.
Документы предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1: Публикация японской патентной заявки № 2010-122023
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Однако в традиционном способе, описанном выше, для того, чтобы определять, что TPMS-датчик достиг предварительно определенного углового положения, необходимо укорачивать период или цикл выборки. Таким образом, существует проблема в продлении срока службы аккумуляторной батареи TPMS-датчика (устройства передачи давления воздуха в шине).
Цель настоящего изобретения состоит в предоставлении системы контроля давления воздуха в шинах, которая может уменьшать потребление энергии устройством передачи давления воздуха в шине.
Средство для решения задачи
[0005] Для того, чтобы достичь цели, согласно настоящему изобретению, выполняется определение углового положения устройства передачи давления воздуха в шине на основе составляющей гравитационного ускорения центробежного ускорения, когда передается информация о давлении воздуха в шине, и в предварительно определенном периоде или цикле как информация о давлении воздуха в шине, так и информация об угловом положении конфигурируются для передачи в беспроводном сигнале.
Преимущества изобретения
[0006] Следовательно, согласно настоящему изобретению потребление энергии устройством передачи давления воздуха в шине может быть уменьшено.
Краткое описание чертежей
[0007] Фиг. 1 - конфигурационная схема, иллюстрирующая конфигурацию устройства контроля давления воздуха в шине в первом варианте осуществления;
Фиг. 2 - схематичный чертеж, иллюстрирующий колесо в первом варианте осуществления;
Фиг. 3 - конфигурационная схема TPMS-датчика в первом варианте осуществления;
Фиг. 4 показывает графики, иллюстрирующие изменения в скорости вращения колеса и центробежном ускорении в первом варианте осуществления;
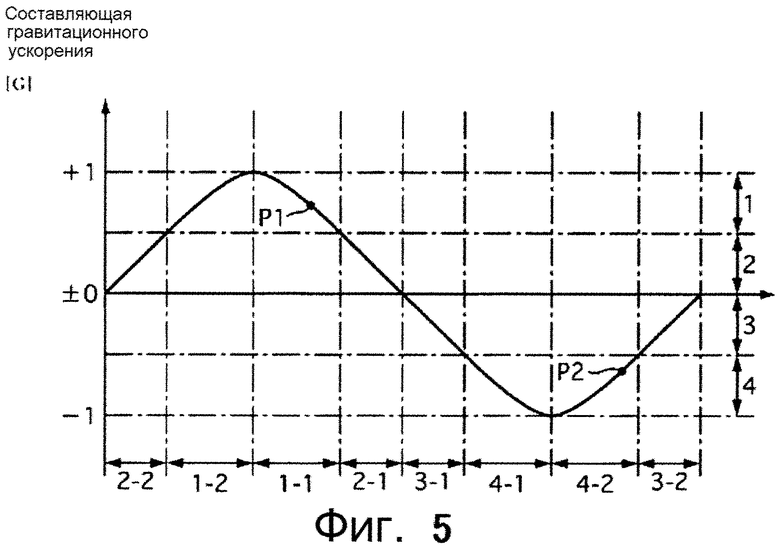
Фиг. 5 - схема, иллюстрирующая зонирование составляющей гравитационного ускорения в первом варианте осуществления;
Фиг. 6 - схема, иллюстрирующая содержимое информации составляющей гравитационного ускорения в соответствии с составляющей гравитационного ускорения во время передачи в первом варианте осуществления;
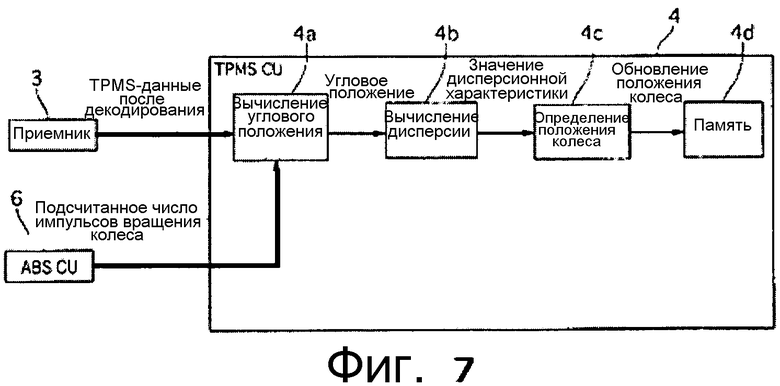
Фиг. 7 - структурная схема управления блока управления TPMS в первом варианте осуществления;
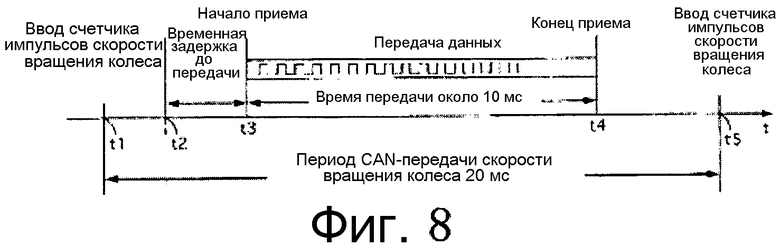
Фиг. 8 - диаграмма, иллюстрирующая способ вычисления углового положения каждого колеса в первом варианте осуществления;
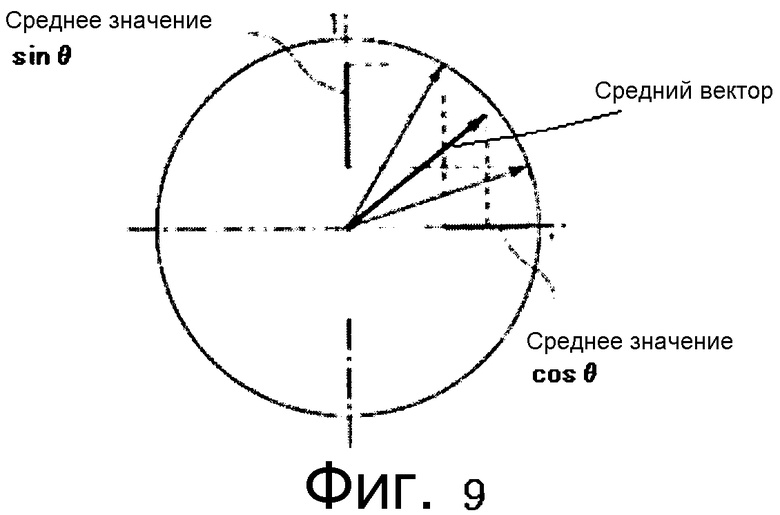
Фиг. 9 - диаграмма, иллюстрирующая способ вычисления значения дисперсионной характеристики;
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая процесс управления определением положения колеса в первом варианте осуществления; и
Фиг. 11 - диаграмма, иллюстрирующая соотношение между угловыми положениями каждого колеса и числом приемов TPMS-данных.
Описание ссылочных позиций
[0008] 1 колесо
2 TPMS-датчик (устройство передачи давления воздуха в шине, механизм передачи давления воздуха в шине)
2a датчик давления (механизм обнаружения давления воздуха в шине)
2b датчик ускорения (механизм обнаружения ускорения)
2c блок управления датчика (механизм определения положения)
2d передатчик (механизм передачи)
3 приемник (механизм приема)
4 блок управления TPMS (механизм определения положения колеса)
6 блок управления ABS (механизм обнаружения углового положения)
13 система контроля давления воздуха в шинах
14 основной блок или часть TPMS (основная часть устройства контроля давления воздуха в шинах)
Варианты осуществления для реализации изобретения
[0009] [Первый вариант осуществления]
[Общая конфигурация]
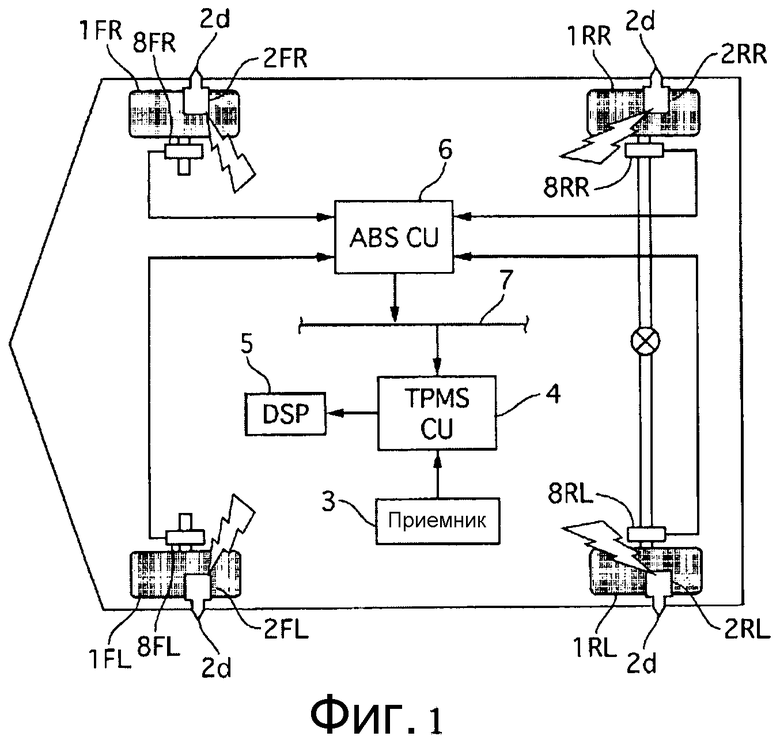
Фиг. 1 - конфигурационная схема, иллюстрирующая систему 13 контроля давления воздуха в шинах или пневматического давления в первом варианте осуществления. На этой фигуре конечные символы, приложенные к каждой ссылочной позиции, предназначены, чтобы указывать следующее: FL означает левое переднее колесо, FR означает правое переднее колесо, RL означает левое заднее колесо, а RR означает правое заднее колесо, соответственно. В последующем описании, когда специально не требуется, описание FL, FR, RL и RR будет опущено.
Устройство 13 контроля давления воздуха в шинах в первом варианте осуществления снабжено TPMS (система контроля давления в шинах) датчиками 2 и основным блоком 14 TPMS. Основной блок 14 TPMS снабжен приемником 3, блоком 4 управления TPMS, дисплеем 5 и блоком 6 управления ABS (антиблокировочная тормозная система) и датчиками 8 скорости вращения колес.
[0010] [Конфигурация TPMS-датчика]
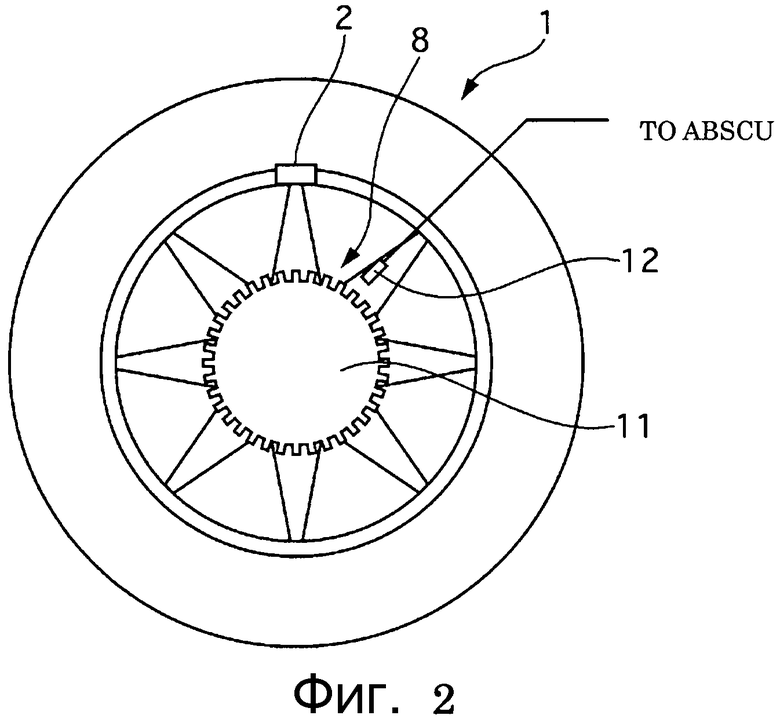
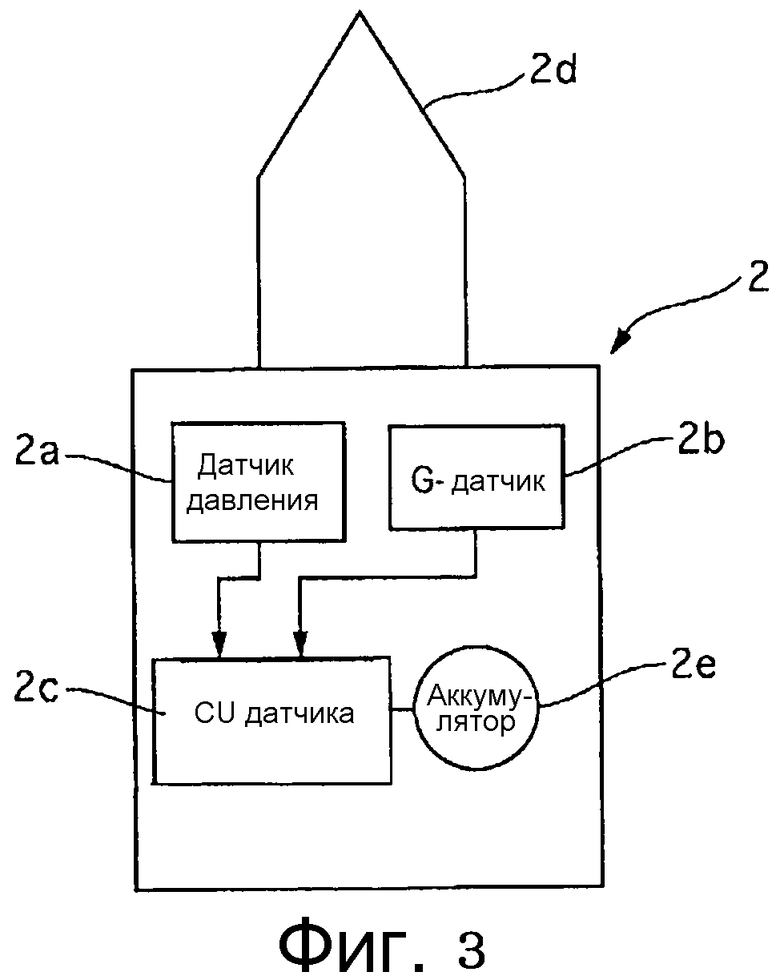
Фиг. 2 показывает колесо 1. Как показано на фиг. 2, TPMS-датчик 2 устанавливается на каждом из колес 1 в положении воздушного клапана рядом с внешней окружной стороной колеса 1. Фиг. 3 - схема конфигурации TPMS-датчика 2. TPMS-датчик 2 содержит датчик 2a давления, датчик 2b ускорения, блок 2c управления датчика, передатчик 2d и аккумулятор 2e таблеточного типа.
[0011] Датчик 2a давления обнаруживает давление воздуха в шине. Датчик 2b ускорения обнаруживает ускорение в центробежном направлении (центробежное ускорение) [G], действующее на колесо. Блок 2c управления датчика работает за счет мощности, подаваемой от аккумулятора 2e таблеточного типа, и принимает информацию о давлении воздуха в шине от датчика 2a давления и информацию о центробежном ускорении от датчика 2b ускорения, соответственно. Кроме того, TPMS-данные, содержащие информацию о давлении воздуха в шине и ID (идентификационную информацию) датчика, которая предварительно задана и уникальна для каждого TPMS-датчика 2, отправляются в беспроводном сигнале из передатчика 2d. В первом варианте осуществления ID датчиков определены цифрами от 1 до 4, ассоциированными с TPMS-датчиками 2.
[0012] Блок 2c управления датчика сравнивает ускорение в центробежном направлении, обнаруженное датчиком 2b ускорения, с предварительно заданным пороговым значением для определения состояния движения транспортного средства. Когда центробежное ускорение меньше, чем пороговое значение определения движения, выполняется определение, что транспортное средство остановлено или неподвижно, так что передача TPMS-данных прекращается. С другой стороны, когда центробежное ускорение превышает пороговое значение определения движения, выполняется определение, что транспортное средство движется, и TPMS-данные будут передаваться в предварительно определенный момент времени.
[0013] [Конфигурация датчика скорости вращения колеса]
Датчик 8 скорости вращения колеса состоит из ротора 11 и обнаруживающей части 12. Как показано на фиг. 2, ротор 11 сформирован в форме зубчатого колеса и закреплен соосно с центром вращения колеса 1, чтобы иметь возможность вращения как неотъемлемая часть. Предусмотрена обнаруживающая часть 12, обращенная к выступающей поверхности ротора 11. Обнаруживающая часть 12 состоит из постоянного магнита и катушки. Когда ротор вращается, вогнуто-выпуклая или выступающая поверхность ротора пересекает магнитное поле, сформированное на внешней границе датчика 8 скорости вращения колеса, так что плотность магнитного потока изменяется, что формирует электродвижущую силу в катушке, и такое изменение в напряжении выводится в качестве импульсного сигнала скорости вращения колеса в блок 6 управления ABS.
Ротор 11 состоит из 48 зубцов, так что обнаруживающая часть 12 сконфигурирована, чтобы выводить цепочку импульсов 48 раз каждый раз, когда колесо 1 делает один оборот.
[0014] [Конфигурация блока управления ABS]
Блок 6 управления ABS принимает изменение импульсных сигналов скорости вращения колеса от каждого датчика 8 скорости вращения колеса, чтобы подсчитывать число импульсов, чтобы определять скорость вращения колеса для каждого колеса 1 на основе изменения в числе импульсов в предварительно определенное время. Когда обнаруживается тенденция к блокировке колеса 1 на основе скорости вращения колеса для каждого колеса 1, антиблокировочное управление с помощью тормоза выполняется посредством регулировки или удерживания давления колесного гидравлического тормозного цилиндра этого колеса, чтобы пресекать тенденцию к блокировке посредством задействования непоказанного ABS-актуатора. Дополнительно, блок 6 управления ABS выводит значение счетчика импульсов скорости вращения колеса в CAN-линию 7 связи с постоянным интервалом (например, каждые 20 [мс]).
[0015] [Конфигурация приемника]
Приемник 3 принимает беспроводной сигнал, выводимый из каждого TPMS-датчика, чтобы декодировать и выводить его в блок 4 управления TPMS.
[0016] [Конфигурация блока управления TPMS]
Блок 4 управления TPMS принимает TPMS-данные от каждого TPMS-датчика, декодированные в приемнике 3. Блок 4 управления TPMS хранит соотношение соответствия между ID каждого датчика и положением каждого колеса в энергонезависимой памяти 4d (см. фиг. 7), и со ссылкой на соотношение соответствия, хранящее ID датчика TPMS-данных, определяет, какому положению колеса TPMS-данные соответствуют. Давление воздуха в шине, содержащееся в TPMS-данных, будет отображено на дисплее 5 как давление воздуха, соответствующее положению колеса. Когда давление воздуха в шине падает ниже нижнего предельного значения, снижение в давлении воздуха в шине будет сообщено водителю посредством изменения цвета дисплея, мигающего указания или предупреждающего сигнала.
[0017] Как описано выше, на основе соотношения соответствия между ID датчика и положением колеса, сохраненного в памяти 4d, блок 4 управления TPMS определяет, какому колесу принятые TPMS-данные принадлежат. Однако когда выполняется перестановка шин, пока транспортное средство стоит, соотношение соответствия между ID датчика и положением колеса, сохраненное в памяти 4d, не согласуется с фактическим соотношением соответствия, и невозможно определять, какому колесу TPMS-данные принадлежат, так что никто не может сказать, с каким колесом TPMS-данные ассоциированы. Здесь "перестановка шин" ссылается на операцию обмена местами положений установки шин на колесах с тем, чтобы обеспечивать равномерный износ протектора шин и, таким образом, продлевать срок эксплуатации (срок службы протектора). Например, для пассажирского транспортного средства обычно шины передних/задних колес меняются местами, как и шины левых/правых колес.
Следовательно, необходимо обновлять соотношение соответствия между ID каждого датчика и положением каждого колеса, сохраненное в памяти 4d, после перестановки шин. Однако, поскольку существует взаимосвязь между TPMS-датчиком 2, установленным на колесе 1, и блоком 4 управления TPMS, установленным на кузове транспортного средства, в системе контроля давления воздуха в шинах в первом варианте осуществления протокол памяти 4d при обновлении задается заранее.
Теперь приводится описание управления блока 4 управления TPMS.
[0018] Когда время определения остановки транспортного средства равно или больше чем 15 минут, TPMS-датчик 2 определяет, что могла быть выполнена перестановка шин.
Когда время определения остановки транспортного средства меньше чем 15 минут, определяется, что обновление памяти 4d не требуется, и выбирается "обычный режим". Когда время определения остановки транспортного средства равно или большеж чем 15 минут, определяется, что необходимо обновление памяти 4d, и будет выбран "режим передачи в позиции".
[0019] [Режим передачи в фиксированный момент времени]
Сначала приводится описание управления TPMS-датчика 2 в обычном режиме передачи.
Блок 2c управления датчика определяет остановку транспортного средства, когда центробежное ускорение, обнаруженное датчиком 3b ускорения, меньше, чем пороговое значение для определения движения транспортного средства, и прекращает передавать TPMS-данные. С другой стороны, когда центробежное ускорение меньше, чем пороговое значение движения транспортного средства, определяется состояние движения транспортного средства, и TPMS-данные будут передаваться в постоянном периоде (каждую одну минуту, например).
[0020] [Режим передачи в позиции]
Теперь приводится описание управления TPMS-датчика 2 во время режима передачи в позиции.
В режиме передачи в позиции с более коротким интервалом (с интервалом в 10 [с], например), чем период передачи режима передачи в фиксированной позиции, и когда TPMS-датчик 2 достигает фиксированного углового положения (верхнего положения колеса 1), TPMS-данные транслируются с добавленной составляющей гравитационного ускорения во время процесса передачи.
[0021] Режим передачи в позиции выполняется до тех пор, пока число передач TPMS-данных не достигнет предварительно определенного числа раз (например, 40 циклов). Когда число случаев передачи достигает 40 раз, режим передачи в позиции переходит в обычный режим. Когда выполнено определение, что транспортное средство стоит во время режима передачи в фиксированной позиции, и время определения остановки транспортного средства меньше чем 15 [мин], подсчет передач TPMS-данных будет продолжен при повторном запуске. Когда время определения остановки транспортного средства равно или больше чем 15 [мин], при повторном запуске счетчик TPMS-данных перед остановкой транспортного средства сбрасывается, и выполняется подсчет передач.
[0022] [Составляющая гравитационного ускорения]
TPMS-датчик передает, как описано выше, TPMS-данные с составляющей гравитационного ускорения, добавленной к TPMS-данным.
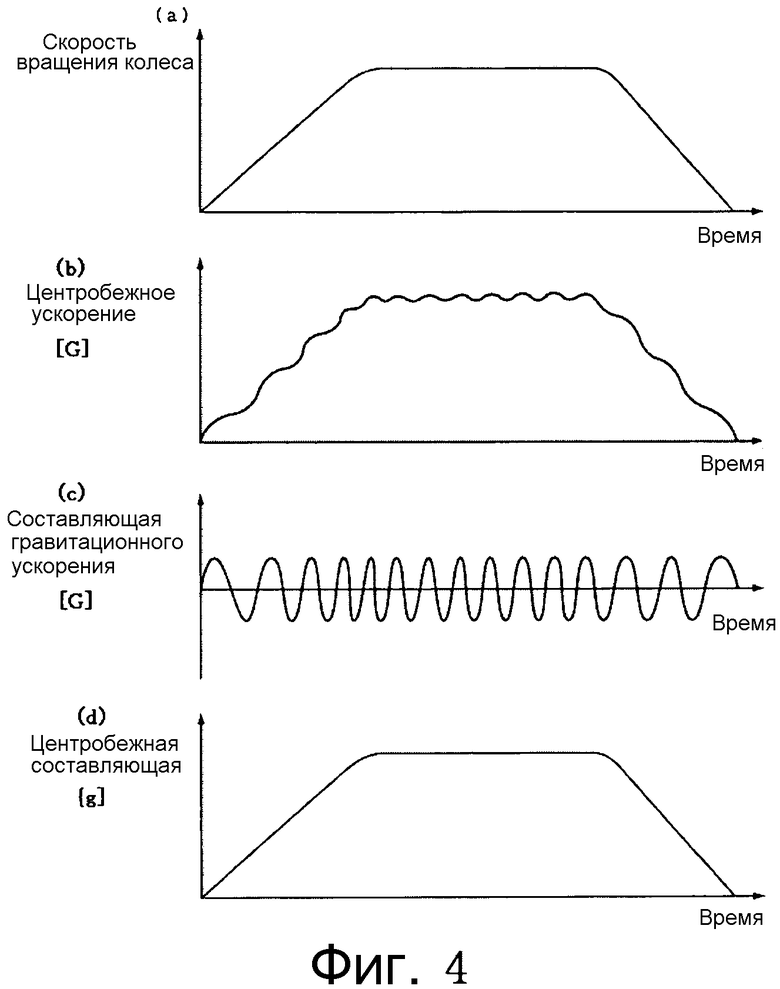
[0023] Фиг. 4 - графики, иллюстрирующие изменения как в скорости вращения колеса, так и в центробежном ускорении, обнаруженном датчиком 2b ускорения. Фиг. 4(a) показывает скорость вращения колеса, фиг. 4(b) показывает центробежное ускорение, фиг. 4(c) показывает составляющую гравитационного ускорения центробежного ускорения, и фиг. 4(d) показывает график, иллюстрирующий центробежную составляющую центробежного ускорения, соответственно.
[0024] Центробежное ускорение может быть разделено на центробежную составляющую, которая образуется вследствие центробежной силы, создаваемой в соответствии с вращением колеса 1, и составляющую гравитационного ускорения, которая образуется вследствие гравитационного ускорения.
[0025] Центробежное ускорение показывает волнистый профиль, но изменяется так, чтобы следовать скорости вращения колеса, как показано на фиг. 4(a), в целом. Как показано на фиг. 4(d), составляющая центробежной силы развивается, по существу, синхронно со скоростью вращения колеса. С другой стороны, составляющая гравитационного ускорения становится синусоидой, которая движется взад и вперед между -1 [G] и +1 [G], как показано на фиг. 4(c), ее период становится короче, когда скорость вращения колеса увеличивается. Это обусловлено тем, что, когда TPMS-датчик 2 приходит в верхнюю точку колеса, составляющая гравитационного ускорения достигает +1 [G], а когда он приходит в нижнюю точку, направление TPMS-датчика 2 противоположно направлению в верхней точке с обнаружением "-1" [G]. В положении 90 градусов относительно верхней и нижней точек, он становится "0" [G]. Другими словами, угловое положение TPMS-датчика 2 может быть получено на основе составляющей гравитационного ускорения.
[0026] [Управление добавлением информации о положении]
Для того, чтобы передавать TPMS-данные, когда TPMS-датчик 2 достиг предварительно определенного положения, составляющая гравитационного ускорения должна отбираться на постоянной основе. Кроме того, чтобы улучшать позиционную точность, период выборки должен быть сокращен. Это увеличит потребление энергии, так что продление срока эксплуатации аккумуляторной батареи не может быть достигнуто.
Таким образом, в первом варианте осуществления, в режиме передачи в позиции, к TPMS-данным добавляется информация о положении во время процесса передачи. Информация о положении - это такая информация, которая указывает, какой из восьми зон TPMS-датчик принадлежит, когда один круговой оборот разделен на восемь зон. Более конкретно, синусоида составляющей гравитационного ускорения делится на восемь зон, и позиционная информация получается посредством идентификации зоны, в которой расположена обнаруженная составляющая гравитационного ускорения.
Фиг. 5 - схема, описывающая операцию зонирования составляющей гравитационного ускорения. Как показано на фиг. 5, в зависимости от величины составляющей гравитационного ускорения формируются четыре зоны. В частности, задается зона 1, где составляющая гравитационного ускорения изменяется в диапазоне между +0,5 [G] и 1 [G], задается зона 2, где составляющая гравитационного ускорения находится между ±0 [G] и менее +0,5 [G], зона 3 с диапазоном между -0,5 [G] и ±0 [G], зона 4 с диапазоном, большим чем -1 [G], и меньшим чем -0,5 [G], соответственно. Дополнительно, диапазон, где составляющая гравитационного ускорения уменьшается, определяется как подзона 1, тогда как диапазон, где составляющая гравитационного ускорения увеличивается, определяется как подзона 2. Например, точка P1 на фиг. 5 представлена зоной 1-1, точка P2 представлена зоной 4-2, соответственно.
[0027] Фиг. 6 показывает пример содержимого информации составляющей гравитационного ускорения в соответствии с составляющей гравитационного ускорения во время передачи. Фиг. 6 указывает постепенное увеличение скорости вращения колеса, а также сокращение периода составляющей гравитационного ускорения в соответствии с увеличением скорости вращения колеса. Таким образом, угловое положение TPMS-датчика каждые 10 [с] непостоянно.
[0028] Блок 2c управления датчика начинает выборку составляющей гравитационного ускорения непосредственно перед прохождением 10 [c] после предыдущей передачи. Выборка выполняется четыре раза в достаточно коротком периоде или цикле. Осуществляя выборку непосредственно перед передачей как величина составляющей гравитационного ускорения, так и диапазон изменения (увеличения/уменьшения) во времени передачи могут быть получены, и, таким образом, задается зона.
[0029] Например, в точках P3, P4 на фиг. 6 величина составляющей гравитационного ускорения распознается как находящаяся в зоне 1 из выборки непосредственно перед передачей и располагается в подзоне 2, поскольку располагается в зоне увеличения, так что информация о гравитационном ускорении будет отправлена как зона 1-2. С другой стороны, в точке P5, поскольку величина составляющей гравитационного ускорения классифицируется в зону 2, и поскольку она располагается в диапазоне уменьшения, информация о гравитационном ускорении будет передана как зона 2-1. Дополнительно, в точке P6, поскольку величина составляющей гравитационного ускорения классифицируется в зону 4 и поскольку она помещена в диапазоне увеличения, определяется подзона 2.
Таким образом, контроль выполняется только непосредственно перед передачей TPMS-данных, несмотря на сокращение периода выборки, число выборок может быть сохранено небольшим в целом, так что потребление энергии может быть уменьшено, при этом улучшая точность обнаружения составляющей гравитационного ускорения.
[0030] [Управление блока управления TPMS]
Блок 4 управления TPMS определяет, что существует вероятность того, что перестановка шин выполнена, когда время определения остановки транспортного средства равно или более 15 [мин]. Определяется, что нет необходимости обновлять память 4d, когда время определения остановки транспортного средства меньше 15 [мин], и будет выбран "режим контроля". Необходимость обновления памяти 4d определяется, когда время определения остановки транспортного средства равно или более 15 [мин], и будет выбран "режим обучения".
[0031] [Режим контроля]
Теперь приводится описание управления блока управления TPMS во время режима контроля.
Во время режима контроля блок 4 управления TPMS принимает ID датчика из TPMS-данных, введенных из приемника 3, и со ссылкой на соотношение соответствия между ID каждого датчика и положением каждого колеса, сохраненное в энергонезависимой памяти 4d, определяет, каким данным положения колеса эти TPMS-данные принадлежат. Затем, давление воздуха в шине, содержащееся в TPMS-данных, будет отображено на дисплее 5 как давление воздуха колеса 1. Дополнительно, когда давление воздуха шины падает ниже нижнего предела, водитель предупреждается о снижении давления воздуха в шине, водитель информируется о снижении давления воздуха посредством изменения цвета дисплея, мигания дисплея и предупреждающего звука.
[0032] [Режим обучения]
Теперь приводится описание управления блока 4 управления TPMS во время режима обучения.
Режим обучения продолжает выполняться до тех пор, пока выполняется определение, в котором определяется, положению какого колеса каждый TPMS-датчик 2 принадлежит, или пока не пройдет совокупное время движения (например, 8 минут) от начала режима обучения. После завершения режима обучения управление переходит в режим контроля.
Отметим, что даже в середине режима обучения, поскольку TPMS-данные будут вводиться время от времени, отображение давления воздуха и, таким образом, предупреждение о снижении давления воздуха будут выполняться на основе соотношения соответствия перед обновлением между ID каждого датчика и положением каждого колеса, сохраненного в памяти 4d.
[0033] В режиме обучения угловое положение каждого колеса получается в момент времени и в положении того TPMS-датчика 2, который передал TPMS-данные, включающие в себя конкретный ID датчика, на основе значения счетчика импульсов скорости вращения колеса от блока 6 управления ABS и времени, в которое TPMS-данные, включающие в себя этот конкретный ID датчика, приняты.
[0034] В режиме передачи в позиции TPMS-датчик 2 передает TPMS-данные с добавленной информацией составляющей гравитационного ускорения. Например, хотя угловое положение колеса 1, на котором TPMS-датчик 2 с ID1 установлен, согласуется с информацией составляющей гравитационного ускорения, отправленной из TPMS-датчика, угловое положение другого колеса 1 и информация составляющей гравитационного ускорения от TPMS-датчика 2 с ID1 не совпадают.
[0035] Это обусловлено тем, что, когда транспортное средство перемещается или движется, скорость вращения каждого колеса 1 может отличаться друг от друга вследствие различия в колеях между внешними и внутренними колесами, блокировки и проскальзывания колес 1 и различия в давлении воздуха в шинах. Даже когда транспортное средство движется прямо, поскольку водитель все еще может совершать мгновенные корректировки на рулевом колесе, и существует некоторое различие в поверхности дороги между левой и правой сторонами, различие в скорости вращения опять же развивается между передними и задними колесами и между левыми и правыми колесами.
[0036] Теперь приводится подробное описание управления определением положения колеса, которое имеет место во время режима обучения посредством блока 4 управления TPMS. Для простоты описания описывается только процесс определения положения колеса TPMS-датчика 2 с ID1, процесс определения положения колес других TPMS-датчиков 2 выполняется аналогичным образом.
Фиг. 7 - структурная схема управления блока 4 управления TPMS для выполнения управления определением положения колеса. Блок 4 управления TPMS имеет блок 4a вычисления углового положения, блок 4b вычисления дисперсии, блок 4c определения положения колеса (механизм определения положения колеса) и память 4d.
[0037] [Управление вычислением углового положения]
Блок 4a вычисления углового положения принимает TPMS-данные после декодирования для вывода из приемника 3 и значение счетчика импульсов скорости вращения колеса, выведенное из блока 6 управления ABS, чтобы вычислять угловое положение для каждого колеса, когда угловое положение TPMS-датчика с ID1 было передано в TPMS-данных.
[0038] Как описано выше, ротор 11 имеет 48 зубцов. Однако блок 6 управления ABS подсчитывает только импульсы скорости вращения колеса и не в состоянии идентифицировать каждый зубец. Таким образом, гипотетически, блок 4a вычисления углового положения назначает номер зубца каждому из 48 зубцов и определяет угловое положение колеса 1, на основе назначенного номера зубца. После начала режима обучения блок 4a вычисления углового положения накапливает и сохраняет значение счетчика импульсов скорости вращения колеса, введенных из блока 6 управления ABS. Номер зубца может быть получен посредством добавления 1 к остатку после деления суммарного значения импульсов скорости вращения колеса на число зубцов, равное 48.
[0039] Возникает временная задержка между временем, в которое TPMS-датчик 2 с ID1 передает TPMS-данные, и временем, в которое приемник 3 принимает TPMS-данные. Дополнительно, временная задержка также возникает между временем, когда TPMS-датчик 2 с ID1 начал процесс передачи TPMS-данных, и моментом времени, в который TPMS-данные фактически передаются.
[0040] Поскольку блок 6 управления TPMS не может непосредственно распознать время, в которое TPMS-датчик начал передачу, время, в которое TPMS-датчик 2 начал передачу, оценивается посредством обратного отсчета от времени, в которое приемник 3 принял TPMS-данные, и необходимо вычислять угловое положение каждого колеса в это время.
[0041] Кроме того, значение счетчика импульсов скорости вращения колеса будет приниматься только от блока 6 управления ABS каждые 20 [мс]. Другими словами, поскольку значение счетчика при каждом отдельном импульсе не вводится, необходимо вычислять номер зубца, когда TPMS-датчик 2 с ID1 достигает верхней или наивысшей точки.
[0042] Фиг. 8 - диаграмма, описывающая способ вычисления, чтобы получать номер зубца (угловое положение колеса 1) ротора 11, когда TPMS-датчик 2 передал TPMS-данные.
На фиг. 8 t1 представляет время, когда вводится значение счетчика импульсов скорости вращения колеса; t2 представляет время, когда угловое положение TPMS-датчика 2 с ID1 начинает процесс передачи TPMS-данных; t3 представляет время, когда TPMS-датчик 2 с ID1 фактически начинает передачу TPMS-данных; t4 представляет время, когда прием TPMS-данных завершается; и t5 представляет время, когда вводится значение счетчика импульсов скорости вращения колеса. Блок 6 управления TPMS непосредственно знает время t1, t4 и t5. Время t3 может быть вычислено посредством вычитания длины данных (номинальное значение, например, около 10 мс) для TPMS-данных из времени t4; а t2 может быть вычислено посредством вычитания временного запаздывания (заранее доступно посредством эксперимента и т.п.) в передаче. В течение 20 [мс] изменение в скорости вращения колеса достаточно мало, так что предполагается постоянная скорость.
[0043] Предполагая номер зубца n1 в момент времени t1, номер зубца n2 в момент времени t2, и n5 в момент времени t5, соответственно, задается выражение:
(t2-t1)/(t5-t1)=(n2-n1)/(n5-n1)
Таким образом,
n2-n1=(n5-n1)*(t2-t1)/(t5-t1)
Номер зубца n2 в момент времени t2, в который угловое положение TPMS-датчика 2 с ID1 достигает верхней точки, может быть получен посредством следующей формулы;
n2=n1+(n5-n1)*(t2-t1)/(t5-t1)
[0044] [Управление блока вычисления дисперсии]
Блок 4b вычисления дисперсии накапливает номер зубца каждого колеса 1, вычисленный посредством блока 4a вычисления углового положения в момент времени t2, в который TPMS-датчик 2 с ID1 начал передачу TPMS-данных, и вычисляет степень дисперсии в данных вращения каждого колеса как значение дисперсионной характеристики.
[0045] Поскольку TPMS-датчик 2 передает TPMS-данные в фиксированный момент времени, угловое положение в начале процесса передачи может изменяться каждый раз. Таким образом, если данные углового положения каждого колеса 1 используются как есть, т.е. без корректировки, трудно идентифицировать положение колеса TPMS-датчика 2 с ID1 из значения дисперсионной характеристики. Следовательно, номер зубца колеса 1, полученный таким образом, будет подвергаться корректировке.
[0046] Корректировка углового положения колеса 1 выполняется посредством установки или назначения корректирующего значения в каждой из зон информации составляющей гравитационного ускорения. Соответствующие корректирующие значения определяются, как изложено ниже:
Зона 1-1: корректирующее значение 0
Зона 2-1: корректирующее значение +42
Зона 3-1: корректирующее значение +36
Зона 4-1: корректирующее значение +30
Зона 4-2: корректирующее значение +24
Зона 3-2: корректирующее значение +18
Зона 2-2: корректирующее значение +12
Зона 1-2: корректирующее значение +6
[0047] Когда корректировки выполняются с помощью этих корректирующих значений, когда информация составляющей гравитационного ускорения из TPMS-данных, передаваемых TPMS-датчиком с ID1, указывает зону 2-2, а номер зубца колеса 1, который получен, равен 13, тогда номер зубца после корректировки будет 25. Когда номер зубца превышает 48, остаток, полученный делением на 48, будет установлен в качестве номера зубца.
[0048] Фиг. 9 - диаграмма, иллюстрирующая способ вычисления значения дисперсионной характеристики. Согласно первому варианту осуществления предполагается единичная окружность (окружность с радиусом, равным 1) с исходной точкой (0, 0) на двухмерной плоскости, и угловое положение θ [град.] (=360×число зубцов ротора/48) каждого колеса 1 преобразуется в окружные координаты (cos θ, sin θ) на единичной окружности. Более конкретно, угловое положение каждого колеса 1 вычисляется следующим образом: рассмотрим вектор, имеющий исходную точку (0, 0), в качестве начальной точки и координаты (cos θ, sin θ) в качестве конца с длиной, равной 1, получаются средние векторы (ave_cos θ, ave_sin θ) каждого вектора одних и тех же данных углового положения, и скалярная величина среднего вектора вычисляется в качестве значения X дисперсионной характеристики данных углового положения:
(cos θ, sin θ)=(cos((n2+1)*2π/48), sin((n2+1)*2π/48))
Следовательно, предположим число случаев приема TPMS-данных относительно идентичного ID датчика как N (N является положительным целым), средние векторы (ave_cos θ, ave_sin θ) выражаются следующим образом:
(ave_cos θ, ave_sin θ)=((Σ(cos θ))/N, (Σ(sin θ))/N)
Значение X дисперсионной характеристики может, таким образом, быть представлено как следующее:
X=ave_cos θ2+ave_sin θ2
[0049] [Управление блока определения положения колеса]
Блок 4c определения положения колеса работает следующим образом. Значения X дисперсионной характеристики данных углового положения каждого колеса 1 сравниваются друг с другом, и когда наибольшее значение из значений X дисперсионной характеристики больше, чем первое пороговое значение (например, 0,57), а остальные 3 значения X дисперсионной характеристики меньше, чем второе пороговое значение (например, 0,37), выполняется определение, что колесо 1, соответствующее максимальному значению X дисперсионной характеристики, установлено с TPMS-датчиком 2 с ID1, и соотношение соответствия между TPMS-датчиком с ID1 и положением колеса 1 обновляется в памяти 4d.
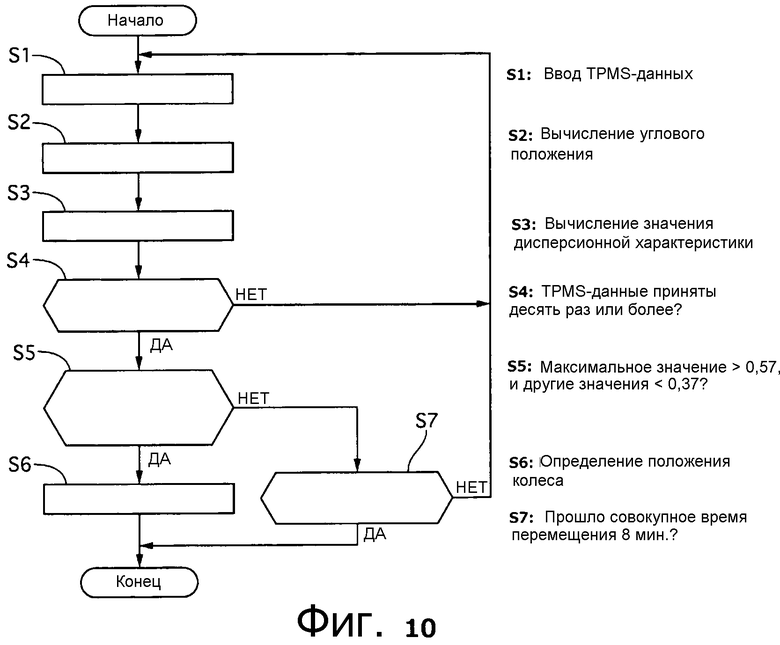
[0050] [Процесс управления определением положения колеса]
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая алгоритм процесса управления определением положения колеса. В последующем, соответствующие этапы операции будут описаны. В последующем описании предполагается случай, когда ID датчика равен "1". Однако, для других ID (ID=2, 3, 4), процесс управления определением положения колеса также выполняется параллельно.
На этапе S1 блок 4a вычисления углового положения принимает TPMS-данные с ID датчика, равные 1.
На этапе S2 блок 4a вычисления углового положения вычисляет угловое положение каждого колеса 1.
[0051] На этапе S3 блок 4b вычисления дисперсии вычисляет значение X дисперсионной характеристики данных углового положения каждого колеса 1.
На этапе S4 выполняется определение относительно того, приняты ли TPMS-данные с ID датчика, равными 1, предварительно определенное число раз (например, 10 раз) или более. Если результатом определения является "Да", операция переходит к этапу S5. Если определением является "Нет", операция возвращается к этапу S1.
На этапе S5 секция 4c определения положения колеса определяет, превышает или нет наибольшее или максимальное значение для значения дисперсионной характеристики первое пороговое значение 0,57, и меньше или нет значение оставшихся значений дисперсионной характеристики второго порогового значения 0,37. Если определением является "Да", операция переходит к этапу S6; если результатом определения является "Нет", операция переходит к этапу S7.
[0052] На этапе S6 секция 4c определения положения колеса определяет положение колеса из данных углового положения, соответствующих максимальному или наивысшему значению дисперсионной характеристики, в качестве положения колеса для ID1 датчика. Затем процесс обучения заканчивается.
На этапе S7 секция 4c определения положения колеса определяет, прошло ли предварительно определенное совокупное или накопленное время движения (например, 8 мин) от начала режима обучения. Если результатом определения является "Да", режим обучения завершается. Если результатом определения является "Нет", операция возвращается к этапу S1.
[0053] Когда секция 4c определения положения колеса может определять положения колес для всех ID датчиков в течение предварительно определенного накопленного времени движения, соотношение соответствия между ID датчика и положением колеса обновляется и сохраняется в памяти 4d для регистрации. С другой стороны, когда невозможно определять положение колеса для всех ID датчиков в течение предварительно определенного накопленного времени движения, никакого обновления не выполняется и продолжается использование соотношения соответствия между множеством ID датчиков и положением каждого колеса, в настоящий момент сохраненного в памяти 4d.
[0054] [Действие]
Теперь приводится описание, предполагающее, что положение колеса TPMS-датчика 2 с ID1 было задано левому переднему колесу 1FL в результате перестановки шин.
[Определение положения колеса]
Каждый TPMS-датчик 2 работает следующим образом: когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет 15 мин или дольше, выполняется определение, что существует вероятность того, что выполнена перестановка шин, и операция переходит из обычного режима в режим передачи в позиции. В режиме передачи в позиции каждый TPMS-датчик 2 передает TPMS-данные с добавленной информацией составляющей гравитационного ускорения каждые 10 [с].
[0055] С другой стороны, когда время определения остановки транспортного средства равно или более 15 мин, блок 4 управления TPMS переходит из режима контроля в режим обучения. В режиме обучения, каждый раз, когда TPMS-данные принимаются от каждого TPMS-датчика 2, блок 4 управления TPMS вычисляет угловое положение (номер зубца ротора) каждого колеса 1, когда угловое положение TPMS-датчика 2 достигает верхней точки, каждый раз при приеме TPMS-данных от TPMS-датчика 2, на основе времени ввода значения счетчика импульсов скорости вращения колеса, времени завершения приема TPMS-данных и т.п. Это выполняется повторно 10 или более раз и накапливается в качестве данных углового положения. Среди данных углового положения положение колеса, данные углового положения которого имеют наименьшую степень дисперсии, определяется в качестве положения колеса этого TPMS-датчика 2.
[0056] Как описано выше, когда транспортное средство перемещается или едет, скорость вращения каждого колеса 1 может отличаться друг от друга вследствие различия в колеях между внешними и внутренними колесами, блокировки и проскальзывания колес 1. Таким образом, например, хотя угловое положение колеса 1, на котором установлен TPMS-датчик с ID1, согласуется с составляющей гравитационного ускорения, отправленной из TPMS-датчика с ID1, угловое положение другого колеса 1 не совпадает с составляющей гравитационного ускорения, отправленной из TPMS-датчика с ID1.
Таким образом, когда корректировка углового положения колеса 1, на котором установлен TPMS-датчик 2 с ID1, выполняется на основе информации составляющей гравитационного ускорения, отправленной из TPMS-датчика 2 с ID1, справедливо, что дисперсия между данными углового положения будет небольшой, но, когда корректировка выполняется по угловому положению других колес 1 на основе составляющей гравитационного ускорения, заданной из TPMS-датчика 2 с ID1, дисперсия данных углового положения будет больше. Наблюдая степень дисперсии углового положения каждого колеса 1, положение колеса каждого TPMS-датчика 2 может быть определено с достаточной точностью.
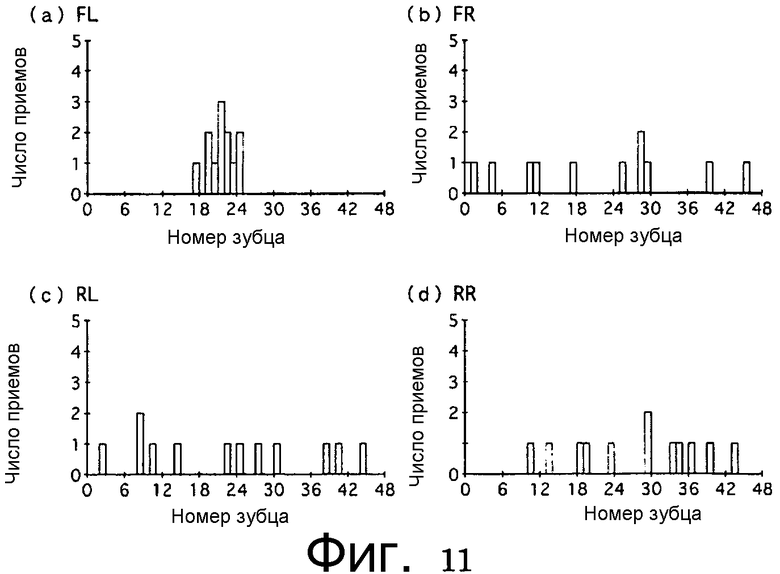
[0057] Фиг. 11 иллюстрирует соотношение между угловыми положениями (номером зубца ротора 11) колес 1FL, 1FR, 1RL и 1RR, когда угловое положение TPMS-датчика 2 с ID достигает верхней точки, и числом приемов TPMS-данных. Здесь, фиг. 11(a) соответствует датчику 8FL скорости вращения колеса для левого переднего колеса 1FL, фиг. 11(b) соответствует датчику 8FR скорости вращения колеса для правого переднего колеса 1FR, фиг. 11 (c) соответствует датчику 8RL скорости вращения колеса для левого заднего колеса 1RL, и фиг. 11 (d) соответствует датчику 8RR скорости вращения колеса для правого заднего колеса 1RR.
[0058] Как будет очевидно из фиг. 11, тогда как степени дисперсии являются высокими в угловых положениях (номер зубца ротора 11), полученных от датчиков 8FR, 8RL и 8RR скорости вращения колеса относительно правого переднего колеса 1FR, левого заднего колеса 1RL и правого заднего колеса 1RR, степень дисперсии положения колеса, полученная от датчика 8FL скорости вращения колеса относительно левого переднего колеса 1FL, является минимальной или наименьшей, так что подтверждается, что период передачи TPMS-данных с ID1 и период вращения ротора 11, по существу, синхронны. Таким образом, может быть определено, что положение TPMS-датчика 2 с ID1 установлено на левом переднем колесе 1FL.
[0059] [Определение степени дисперсии на основе значения дисперсионной характеристики]
Дисперсия, в целом, определяется посредством среднего "квадрата разности из среднего значения или средней величины". Однако, поскольку угловое положение колеса 1 указывается посредством данных об угле с периодичностью, степень дисперсии углового положения не может быть определена с помощью обычной дисперсии.
[0060] Таким образом, в первом варианте осуществления, блок 4b вычисления дисперсии работает следующим образом. Угловое положение θ каждого колеса 1, полученное от каждого датчика 8 скорости вращения колеса, преобразуется в окружные координаты (cos θ, sin θ) единичной окружности, имеющей исходную точку (0, 0) в центре. Координаты (cos θ, sin θ) принимаются в качестве векторов, получаются средние векторы (ave_cos θ, ave_sin θ) векторов данных одинаковых угловых положений, и скалярная величина среднего вектора вычисляется в качестве значения X дисперсионной характеристики. В результате возможно избегать периодичности в определении степени дисперсии углового положения.
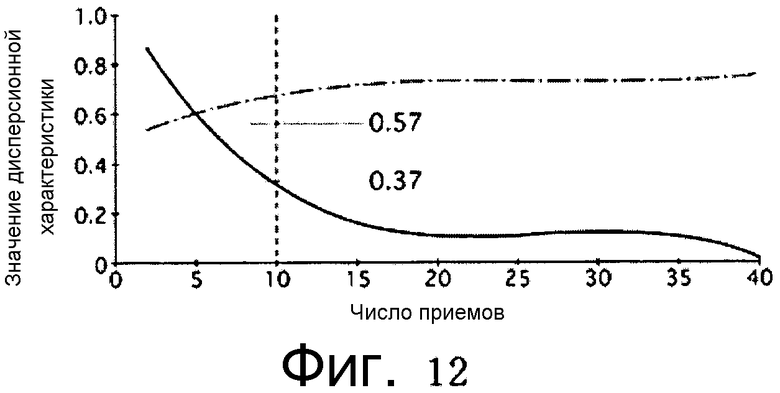
[0061] Фиг. 12 показывает диаграмму, иллюстрирующую изменение в значении X дисперсионной характеристики в соответствии с числом приемов TPMS-данных для ID1. На фиг. 12 пунктирная линия обозначает значение X дисперсионной характеристики левого переднего колеса 1FL, тогда как сплошная линия обозначает значение X дисперсионной характеристики углового положения для правого переднего колеса 1FR, левого заднего колеса 1RL, правого заднего колеса 1RR.
[0062] Как показано на фиг. 12, когда число приемов TPMS-данных для ID1 датчика увеличивается, указывается такая тенденция, в которой дисперсионная характеристика X в угловом положении левого переднего колеса 1FL приближается к "1", в то время как значения X дисперсионной характеристики для правого переднего колеса 1FR, левого заднего колеса 1RL и правого заднего колеса 1RR приближается к "0". Таким образом, может быть идеальным выбирать максимальное значение (т.е. значение дисперсионной характеристики, самое близкое к "1") при достижении достаточного числа приемов (около нескольких десятков раз). Однако, поскольку невозможно сообщать водителю точную информацию о состоянии шины в течение периода определения положения колеса TPMS-датчика 2, длительное время определения является нежелательным. С другой стороны, при недостаточном числе приемов (например, несколько раз), различие в значении X дисперсионной характеристики незаметно, что привело бы к уменьшению точности определения.
[0063] Таким образом, в системе контроля давления воздуха в шинах согласно первому варианту осуществления блок 4c определения положения колеса сравнивает, когда TPMS-данные для одного и того же ID датчика приняты десять раз или более, значения X дисперсионной характеристики данных углового положения каждого колеса, когда конкретный ID датчика был передан. Блок 4c определения положения колеса дополнительно обнаруживает, что максимальное значение из значений X дисперсионной характеристики превышает первое пороговое значение 0,57, тогда как оставшиеся три значения дисперсионной характеристики падают ниже второго порогового значения 0,37, тогда положение колеса из данных углового положения, соответствующих максимальному значению X дисперсионной характеристики, будет идентифицировано как положение колеса TPMS-датчика 2 с ID этого датчика.
[0064] Не только посредством выбора максимального значения из значений дисперсионной характеристики, но и сравнивая максимальное значение с первым пороговым значением (0,57), может быть гарантирована некоторая степень точности определения. Кроме того, сравнивая значения дисперсионной характеристики, отличные от максимального значения, со вторым пороговым значением (0,37), может быть подтверждена предварительно определенная разность (0,2 или более), что дополнительно улучшает точность определения. Следовательно, при относительно небольшом числе приемов, например десять, могут быть достигнуты как точность определения, так и сокращение времени определения.
[0065] [Уменьшение потребления энергии вследствие принудительного изменения режима]
При приеме TPMS-данных сорок (40) раз во время режима передачи в постоянной позиции TPMS-датчик 2 переходит в обычный режим. TPMS-датчик 2 потребляет энергию аккумулятора 2e таблеточного типа при передаче TPMS-данных, так что срок эксплуатации аккумулятора для аккумулятора 2e таблеточного типа будет короче, поскольку режим передачи в постоянной позиции продолжается.
[0066] Таким образом, когда положение каждого колеса не может быть определено, несмотря на прохождение достаточного совокупного времени перемещения, режим передачи в постоянной позиции будет завершен, чтобы переходить в обычный режим, что может пресекать сокращение срока эксплуатации аккумулятора.
[0067] С другой стороны, когда блок 4 управления TPMS не может определить соответствие между ID каждого датчика и положением каждого колеса, несмотря на прошедшее время совокупного перемещения в восемь (8) минут, режим обучения будет завершен, и процесс переходит в режим контроля. Общее число TPMS-данных составляет тридцать (30) раз или менее, когда прошло совокупное время перемещения в восемь минут, режим автообучения может быть завершен, по существу, синхронно с завершением режима передачи в постоянной позиции TPMS-датчика 2.
[0068] [Уменьшение потребления энергии посредством частичного контроля]
Для того чтобы передавать TPMS-данные при достижении TPMS-датчиком предварительно определенного положения, составляющая гравитационного ускорения подвергается непрерывной операции выборки. Дополнительно, для того, чтобы улучшать точность положения, период выборки должен быть сокращен. Таким образом, потребление энергии будет увеличиваться, и длительный срок эксплуатации не может быть достигнут.
[0069] Таким образом, в первом варианте осуществления, TPMS-датчик 2 сконфигурирован, чтобы обнаруживать составляющую гравитационного ускорения во время передачи TPMS-данных каждые 10 секунд времени, чтобы, тем самым, получать угловое положение TPMS-датчика 2 из составляющей гравитационного ускорения для передачи в качестве информации о позиции, которая должна быть добавлена к TPMS-данным.
Следовательно, поскольку TPMS-датчик 2 контролирует только значение составляющей гравитационного ускорения только во время передачи TPMS-данных, число операций выборки будет поддерживаться небольшим, чтобы, тем самым, уменьшать потребление энергии.
[0070] [Более высокая точность информации о позиции]
Поскольку составляющая гравитационного ускорения изменяется в форме синусоиды, только на основе величины гравитационного ускорения, иногда невозможно идентифицировать информацию о позиции TPMS-датчика 2.
Таким образом, в первом варианте осуществления, TPMS-датчик 2 сконфигурирован, чтобы обнаруживать составляющую гравитационного ускорения в предварительно определенном периоде выборки непосредственно перед передачей TPMS-данных. Таким образом, может быть получено направление изменения (увеличение или уменьшение) в составляющей гравитационного ускорения, чтобы определять положение TPMS-датчика 2 на основе величины и направления изменения составляющей гравитационного ускорения.
Следовательно, угловое положение TPMS-датчика 2 может быть точно определено.
[0071] [Преимущества]
Далее приводится описание преимуществ.
В TPMS-датчике 2 согласно первому варианту осуществления могут быть показаны следующие преимущества.
В TPMS-датчике 2 (устройстве передачи давления воздуха в шине), установленном на внешней окружности колеса 1, чтобы передавать информацию о давлении воздуха в шине колеса 1, предусмотрены датчик 2a давления (механизм обнаружения давления воздуха в шине), который обнаруживает давление воздуха в шине, датчик 2b ускорения (механизм обнаружения ускорения), который обнаруживает центробежное ускорение, пока колесо 1 вращается; блок 2c управления датчика (механизм обнаружения составляющей гравитационного ускорения), который определяет угловое положение TPMS-датчика (устройства передачи давления воздуха в шине) на основе составляющей гравитационного ускорения во время передачи информации о давлении воздуха в шине, и передатчик 2d (механизм передачи), который передает как информацию о давлении воздуха в шине, так и информацию об угловом положении TPMS-датчика 2 в беспроводном сигнале.
Следовательно, поскольку TPMS-датчик 2 контролирует значение составляющей гравитационного ускорения только во время передачи TPMS-данных, число выборок может быть сохранено небольшим, точность обнаружения пика составляющей гравитационного ускорения улучшается, и потребление энергии может быть уменьшено.
[0072] (2) Блок 2c управления датчика сконфигурирован, чтобы обнаруживать составляющую гравитационного ускорения центробежного ускорения в каждом периоде выборки перед передачей беспроводного сигнала передатчиком 2d, чтобы, тем самым, определять угловое положение TPMS-датчика 2 на основе величины и направления изменения в составляющей гравитационного ускорения.
[0073] Кроме того, в системе 13 контроля давления воздуха в шинах в первом варианте осуществления могут быть получены следующие преимущества.
(3) В системе 13 контроля давления воздуха в шинах с TPMS-датчиком 2 (механизмом передачи давления воздуха в шине), установленном на внешней окружности колеса 1, чтобы передавать информацию о давлении воздуха в шине колеса 1 через беспроводной сигнал, и основной частью 14 TPMS (основной частью контроля давления воздуха в шинах), установленной на кузове транспортного средства для приема беспроводного сигнала и контроля давления воздуха в шине каждого колеса, TPMS-датчик 2 снабжен датчиком 2a давления (механизмом обнаружения давления воздуха в шине), который обнаруживает давление воздуха в шине, датчиком 2b ускорения (механизмом обнаружения ускорения), который обнаруживает центробежное ускорение, в то время как колесо 1 вращается; блоком 2c управления датчика (механизмом определения положения), который определяет угловое положение TPMS-датчика 2, и передатчиком 2d (механизмом передачи), который передает информацию о давлении воздуха в шине и информацию об угловом положении TPMS-датчика 2 вместе с идентификационной информацией, уникальной для каждого TPMS-датчика 2, в беспроводном сигнале, при этом основная часть TPMS (основная часть контроля давления воздуха в шинах) снабжена приемником 3 (механизмом приема), который принимает информацию о давлении воздуха в шине, отправленную из передатчика 2d каждого TPMS-датчика 2, и информацию об угловом положении TPMS-датчика 2, блоком 6 управления ABS (механизмом обнаружения углового положения) и блоком 4 управления TPMS (механизмом определения положения колеса), который определяет положение колеса 1, на котором TPMS-датчик 2 установлен, на основе углового положения каждого колеса 1 и информации об угловом положении TPMS-датчика 2.
Следовательно, поскольку TPMS-датчик 2 контролирует значение составляющей гравитационного ускорения только во время передачи TPMS-данных, число выборок может поддерживаться небольшим, точность обнаружения пика составляющей гравитационного ускорения может быть повышена, и потребление энергии может быть уменьшено.
[0074] (4) Блок 2c управления датчика сконфигурирован, чтобы обнаруживать составляющую гравитационного ускорения центробежного ускорения в каждом установленном периоде выборки перед передачей беспроводного сигнала передатчиком 2d и определять угловое положение TPMS-датчика 2 на основе величины и направления изменения в составляющей гравитационного ускорения.
Следовательно, угловое положение TPMS-датчика 2 может быть точно определено.
[0076] [Другие варианты осуществления]
В то время как лучшие варианты осуществления описаны, чтобы реализовывать настоящее изобретение, конкретная конфигурация не ограничена этими вариантами осуществления. Наоборот, изменение конструкции или модификации, которые не отступают от сущности настоящего изобретения, могут быть включены в настоящее изобретение.
Например, пример датчика скорости вращения колеса показан в качестве механизма обнаружения углового положения в вариантах осуществления в транспортном средстве, которое снабжено электродвигателем, встроенным в колесо, в качестве источника мощности, датчик положения вала электродвигателя может быть использован для того, чтобы обнаруживать угол поворота.
Изобретение относится к автомобильному транспорту. Устройство передачи давления воздуха в шине сконфигурировано так, чтобы определять угловое положение устройства передачи давления воздуха в шине на основе составляющей гравитационного ускорения центробежного ускорения во время передачи информации о давлении воздуха в шине; и передавать, в беспроводном сигнале и в предварительно определенном цикле, информацию о давлении воздуха в шине и информацию об угловом положении устройства передачи давления воздуха в шине. Технический результат - уменьшение потребления энергии устройством передачи давления воздуха в шине. 2 з.п. ф-лы, 12 ил.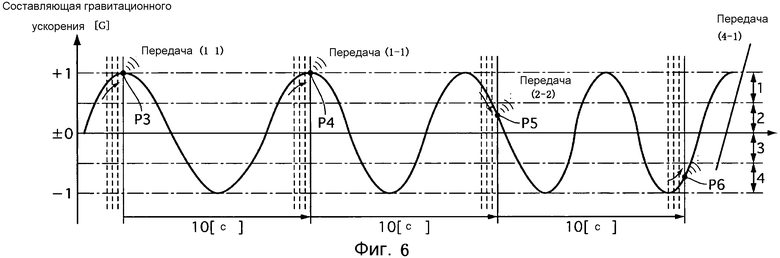
1. Система контроля давления воздуха в шинах для контроля давления воздуха каждой шины, содержащая:
механизм обнаружения давления воздуха в шине, установленный на каждом колесе, который обнаруживает давление воздуха в шине;
механизм обнаружения ускорения, установленный на каждом колесе, который обнаруживает центробежное ускорение, в то время как колесо вращается;
механизм определения положения, который обнаруживает положение в одном периоде составляющей гравитационного ускорения центробежного ускорения, подверженной периодическому изменению вместе с вращением колеса;
передатчик, установленный на каждом колесе, который передает обнаруженное давление воздуха в шине, положение составляющей гравитационного ускорения во время передачи беспроводного сигнала и идентификационную информацию, уникальную для каждого передатчика, в качестве беспроводного сигнала;
приемник, установленный на кузове транспортного средства, чтобы принимать беспроводной сигнал;
механизм обнаружения углового положения, установленный на кузове транспортного средства в соответствии с каждым колесом, чтобы обнаруживать угловое положение колеса; и
механизм определения положения колеса, который корректирует угловое положение каждого колеса во время передачи беспроводного сигнала, включающего в себя конкретную идентификационную информацию, посредством корректирующего значения, заданного в соответствии с позиционной информацией составляющей гравитационного ускорения, наложенной на беспроводной сигнал, содержащий идентификационную информацию, чтобы, таким образом, определять положение колеса для колеса, на котором установлен передатчик, на основе скорректированного углового положения каждого колеса.
2. Система контроля давления воздуха в шинах по п.1, в которой
механизм определения положения сконфигурирован, чтобы выполнять выборку составляющей гравитационного ускорения в каждом предварительно определенном периоде выборки перед передачей беспроводного сигнала и обнаруживать положение в одном периоде составляющей гравитационного ускорения на основе величины и направления изменения в составляющей гравитационного ускорения.
3. Система контроля давления воздуха в шинах либо по п.1, либо по п.2, в которой механизм определения положения сконфигурирован, чтобы определять, когда один период составляющей гравитационного ускорения разделен на множество зон, в какой зоне обнаруженная составляющая гравитационного ускорения центробежного ускорения расположена, и при этом
передатчик передает беспроводной сигнал с наложенной информацией о зоне, в которой составляющая гравитационного ускорения расположена, в качестве позиционной информации составляющей гравитационного ускорения во время передачи беспроводного сигнала.
| JP 2010122023 A, 03.06.2010 | |||
| JP 2005321958 A, 17.11.2005 | |||
| JP 2006138803 A, 01.06.2006 | |||
| US 6112587 A, 05.09.2000 |

