ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройствам захвата изображения и способам управления ими, и, в частности, относится к устройствам захвата изображения, которые выполняют регулирование фокуса с помощью сигнала изображения, полученного датчиком изображения, который фотоэлектрически преобразует изображение объекта, сформированное оптической системой формирования изображения, и к способам управления ими.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Обычно, когда цифровой фотоаппарат, видеокамера, или тому подобное выполняет автофокусировку (АФ), применяется способ, в котором в качестве позиции в фокусе принимается позиция фокусной линзы, обладающая пиковыми высокочастотными компонентами в сигнале яркости, полученном от датчика изображения. Способ сканирования, описанный далее, известен как один из таких способов. В этом способе сканирования, оценочное значение (так называемое "оценочное значение фокуса" здесь и далее) находится на основе высокочастотного компонента сигнала яркости, полученного от датчика изображения при перемещении фокусной линзы по всей совокупности диапазона обнаружения фокуса, и сохраняется. В это время, зона для получения оценочного значения фокуса (далее называемая "кадром автофокусировки") задается в непосредственной близости от центра экрана, вблизи от зоны, где был обнаружен объект, или тому подобного, получается позиция фокусной линзы, при которой оценочное значение фокуса является пиковым в заданном кадре автофокусировки, и эта позиция фокусной линзы задается в качестве позиции фокусной линзы, которая будет использоваться при операции захвата изображения.
Между тем, в течение некоторого времени известно множество способов автоматического регулирования фокуса для объектов с высокой яркостью. В патенте Японии № 3105334, определение того, обладает ли объект высокой яркостью, происходит на основе участка области с низким уровнем яркости или участка с средним уровнем яркости в сигнале изображения снимаемого кадра. В результате определения сигнал контрастности используется для операции фокусировки случае, когда объект является типичным объектом, в то время как операции фокусировки осуществляются таким образом, что область сигнала высокой яркости уменьшается в случае, когда объект является объектом с высокой яркостью, что позволяет выполнить точные операции фокусировки даже на объектах с высокой яркостью.
Кроме того, известно множество способов автоматического регулирования фокуса для случаев, когда объект является точечным источником света. В опубликованном патентном документе Японии № 2002-196220 средняя яркость объекта обнаруживается посредством обработки автоматической экспозиции (AЭ), и в случае, когда яркость ниже, указанного значения, осуществляется операция поиска автофокусировки на соответствующем уровне экспозиции на основе результата обработки автоматической экспозиции, после чего выполняется процесс обнаружения позиции в фокусе, где оценочное значение фокуса находится на максимуме. В случае, когда позиция в фокусе не может быть обнаружена посредством операции поиска автофокусировки, операция поиска автофокусировки осуществляется снова, после уменьшения уровня экспозиции соответствующей экспозиции, что позволяет избежать насыщения сигнала изображения, вызванного точечным источником света. Таким образом, обнаруживается более точная позиция в фокусе на основе результата выполнения множества операций поиска автофокусировки, после чего линза перемещается в полученную позицию в фокусе. Таким образом, этот метод позволяет точно осуществлять операции фокусировки, подлежащие выполнению для объектов, в которых разбросаны точечные источники света с высокой яркостью, например, ночные сцены и т.п.
КМОП датчики, используемые в качестве датчиков изображения в устройствах захвата изображения, таких как цифровые камеры, имеют различные показатели времени экспозиции от строки к строке. Соответственно, с условиями освещения, при которых интенсивность освещения света колеблется с частотой, например, 50 Гц, 60 Гц, и т.п., как в случае с люминесцентной лампой, на экране появятся полосовые изменения яркости, которые двигаются в вертикальном направлении, это явление известно как "мерцание сток". Такое мерцание строк влияет посредством линзы на внешний вид изображений, отображаемых на ЖК экране. При этом, в случае, когда строки, подвергшиеся влиянию мерцания строк, отличаются для каждого момента считывания, или, другими словами, в случае, когда мерцание строк колеблется, вывод оценочного значения фокуса для каждой строки будет колебаться в соответствии с флуктуациями мерцания строк; в результате не может быть обнаружено правильная позиция пика, что влияет на точность автофокусировки.
В качестве контрмеры, известен способ, с помощью которого мерцание подавляется путем задания скорости затвора устройства захвата изображения на 1/50 секунды, 1/100 секунды, или, как в случае флуоресцентной лампы, использующей источник питания переменного тока 50 Гц, и на 1/60 секунд, 1/120 секунд, в случае источника питания от сети переменного тока 60 Гц. Хотя это действие улучшает внешний вид изображения посредством линзы, оно не приводит к оптимальному заданию экспозиции для обработки автофокусировки, и наоборот иногда тормозит достижение точности автофокусировки. Именно поэтому являются предпочтительными параметры задания экспозиции, которые уменьшают глубину резкости за счет назначения приоритета открытой диафрагмы и подавляют шум за счет более низкого коэффициента усиления для того, чтобы облегчить обнаружение позиции пика при обработке автофокусировки.
Соответственно, в качестве способа обеспечения точности автофокусировки, когда происходит мерцание, в опубликованном патентном документе Японии, N: 2008-130531, частота захвата кадров изображения задана на время, синхронизированное с циклом мерцания, что предотвращает колебания мерцания строк для того, чтобы осуществлять управление экспозицией, подходящей для обработки автофокусировки даже при источниках света, вызывающих мерцание.
Однако в вышеупомянутом патентном документе Японии № 3105334, операции фокусировки осуществляются таким образом, что область сигнала высокой яркости уменьшается в случае объекта высокой яркости/объекта точечного источника света. Таким образом, способ подходит для случая, когда основной объект сконфигурирован только из точечного источника света, но есть случаи, когда не может быть осуществлено точное регулирование фокуса, например, в случаях, когда объект точечного источника света и нормально освещенный объект присутствуют вместе. Современные аппараты содержат большое количество пикселей, что делает невозможным игнорировать даже незначительные сдвиги в фокусе и увеличенный спрос на более точное регулирование фокуса.
Нижеперечисленное можно рассматривать в качестве причины, почему не может быть осуществлено точное регулирование фокуса:
- влияние цвета источника света; и
- перепад яркости, вызванный освещенными областями размытости нормального объекта, что приводит к перепаду в области участков высокой яркости.
При этом, в опубликованной патентном документе Японии N 2002-196220 раскрывается осуществление поиска автофокусировки путем сокращения уровня экспозиции за пределы соответствующего уровня экспозиции в том случае, когда не может быть обнаружена позиция в фокусе, и выполнения поиска автофокусировки многократно, а именно, при соответствующей экспозиции и при экспозиции более низкой, чем соответствующая экспозиция, в случае, когда яркость меньше заранее определенного значения. Тем не менее, есть проблема в том, что в случае объекта с высокой яркостью, объекта точечного источника света, или тому подобного, его влияние приведет к позиции, которая не будет сфокусированной позицией, хотя и будет ошибочно определена как позиция в фокусе, и эта проблема не может быть решена, даже если принимаются меры для случаев, когда позиция в фокусе не может быть обнаружена, как в опубликованном патентном документе Японии N: 2002-196220. Существует еще одна проблема в том, что при выполнении многократного поиска автофокусировки, при соответствующей экспозиции и при экспозиции ниже соответствующей экспозиции, увеличивается количество времени, необходимое для обработки автофокусировки.
Кроме того, хотя обычный метод, описанный в опубликованной патентном документе Японии № 2008-130531 стабилизирует оценочное значение фокуса путем предотвращения колебания мерцания сток, в выводе оценочного значения фокуса есть перепад в пределах кадра автофокусировки в областях, которые перекрываются со строками, где уровень экспозиции снизился из-за мерцания сток, и, таким образом, не может быть обеспечена точность автофокусировки. Далее еще, внешний вид изображения, получаемого посредством линзы, отображаемого на ЖК-дисплее, ухудшается вследствие возникновения мерцания сток.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение было сделано с учетом описанной выше ситуации, и дает возможность поддерживать качество изображения, получаемого посредством линзы, отображаемого в блоке отображения без увеличения времени обработки, необходимого для точного выполнения регулирования фокуса.
В соответствии с настоящим изобретением предлагается устройство захвата изображения, содержащее: блок восприятия изображения, имеющий множество пикселей, расположенных в двух измерениях, выполненный с возможностью фотоэлектрического преобразования изображения объекта, сформированного оптической системой формирования изображения, включающей в себя фокусную линзу и вывода электрического сигнала изображения; блок управления, выполненный с возможностью управления, по меньшей мере, одним из скорости считывания и условием экспозиции независимо для каждой из различных зон в блоке восприятия изображения; и блок вычислений, выполненный с возможностью вычисления множества оценочных значений фокуса на основе считывания сигналов изображения из пикселей, присутствующих в области обнаружения фокуса в одной из множества различных зон при множестве различных позиций фокусной линзы при перемещении фокусной линзы, и нахождения, позиции в фокусе фокусной линзы, на основе множества оценочных значений фокуса, причем блок управления принимает первое считывание сигнала изображения из первой зоны среди множества различных зон в качестве сигнала изображения для отображения, подлежащего выводу на блок отображения.
В соответствии с настоящим изобретением, предлагается способ управления устройством захвата изображения, включающим в себя блок восприятия изображения, имеющий множество пикселей, расположенных в двух измерениях, выполненный с возможностью фотоэлектрического преобразования изображение объекта, сформированного оптической системой формирования изображения, включающей в себя фокусную линзу, и вывода электрического сигнала изображения, причем способ содержит этап управления, на котором управляется по меньшей мере одно из скорости считывания и условия экспозиции независимо для каждой из различных зон в блоке восприятия изображения; и этап вычисления, на котором вычисляется множество оценочных значений фокуса на основе вывода сигналов изображения от пикселей, присутствующих в области обнаружения фокуса в одной из множества различных зон при множестве различных позиций фокусной линзы при перемещении фокусной линзы, и нахождения сфокусированной позиций фокусной линзы на основе множества оценочных значений фокуса, причем первое считывание сигнала изображения из первой зоны среди множества различных зон, принимается в качестве сигнала изображения для отображения, подлежащего выводу на блок отображения.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания примерных вариантов осуществления (со ссылкой на прилагаемые чертежи).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в описание и составляют его часть, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для объяснения принципов изобретения.
Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства захвата изображения в соответствии с первого по третий вариантами осуществления настоящего изобретения;
Фиг. 2 является схемой, иллюстрирующей конфигурацию пикселей, имеющихся в устройстве захвата изображения в соответствии с вариантом осуществления;
Фиг. 3 представляет собой временную диаграмму, показывающую вывод сигналов из схемы вертикального сканирования при получении изображений;
Фиг. 4 представляет собой диаграмму, иллюстрирующую периоды накопления заряда и интервалы времени считывания изображений;
Фиг. 5 представляет собой блок-схему, иллюстрирующую последовательность обработки захвата изображения в соответствии с первым вариантом осуществления;
Фиг. 6 представляет собой блок-схему, иллюстрирующую обработку автофокусировки на основе сканирования согласно первому варианту осуществления;
Фиг. 7 представляет собой блок-схему, иллюстрирующую операционную процедуру для обнаружения объекта точечного источника света в соответствии с первым и вторым вариантами осуществления;
Фиг. 8 представляет собой блок-схему, иллюстрирующую порядок действий для нахождения гистограммы Yp и гистограммы ММ в соответствии с первым и вторым вариантами осуществления;
Фиг. 9 представляет собой диаграмму, иллюстрирующую пример кадра автофокусировки;
Фиг. 10 представляет собой схему синхронизации, иллюстрирующую операции, выполненные схемой вертикального сканирования во время обработки автофокусировки нормального изображения в соответствии с первым вариантом осуществления;
Фиг. 11 представляет собой график, изображающий автофокусировку на основе сканирования во время обработки автофокусировки нормального изображения в соответствии с первым вариантом осуществления;
Фиг. 12 является графиком, показывающим автофокусировку на основе сканирования во время обработки автофокусировки точечного источника света в соответствии с первым вариантом осуществления;
Фиг. 13 представляет собой схему синхронизации, иллюстрирующую операции, выполняемые схемой вертикального сканирования во время обработки автофокусировки точечного источника света в соответствии с первым вариантом осуществления;
Фиг. 14 является блок-схемой, иллюстрирующей последовательность обработки захвата изображения в соответствии со вторым вариантом осуществления;
Фиг. 15 представляет собой блок-схему последовательности обработки автофокусировки в соответствии со вторым вариантом осуществления;
Фиг. 16 представляет собой блок-схему, иллюстрирующую обработку автофокусировки на основе сканирования в соответствии со вторым вариантом осуществления;
Фиг. 17 представляет собой блок-схему, иллюстрирующую последовательность обработки захвата изображения в соответствии с третьим вариантом осуществления;
Фиг. 18 представляет собой блок-схему, иллюстрирующую конфигурацию устройства захвата изображения в соответствии с четвертым вариантом осуществления;
Фиг. 19 представляет собой блок-схему обработки автоматической экспозиции в соответствии с четвертым вариантом осуществления;
Фиг. 20 является схемой, иллюстрирующей выявление недостаточной экспозиции в соответствии с четвертым вариантом осуществления;
Фиг. 21 представляет собой блок-схему, иллюстрирующую проведение процесса сброса экспозиции в соответствии с четвертым вариантом осуществления;
Фиг. 22 представляет собой блок-схему, иллюстрирующую операции обработки автоматической экспозиции, показанные на Фиг. 5 в соответствии с пятым вариантом осуществления;
Фиг. 23 представляет собой блок-схему, иллюстрирующую обработку автофокусировки нормального изображения в соответствии с пятым вариантом осуществления;
Фиг. 24 является схемой, иллюстрирующей обработку задания кадра автофокусировки в соответствии с пятым вариантом осуществления; и
Фиг. 25 является схемой, иллюстрирующей обработку для задания достоверности кадра автофокусировки в соответствии с шестым вариантом осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Примеры вариантов осуществления настоящего изобретения будут подробно описаны в соответствии с прилагаемыми чертежами.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
КОНФИГУРАЦИЯ УСТРОЙСТВА И ОСНОВНЫЕ ОПЕРАЦИИ
Фиг. 1 представляет собой блок-схему, иллюстрирующую общую конфигурацию устройства захвата изображения в соответствии с первым вариантом осуществления настоящего изобретения.
На Фиг. 1 устройство захвата изображения 1 соответствует например, цифровому фотоаппарату, цифровой видеокамере и т.п. Узел 2 линзы с переменным фокусным расстоянием и узел 3 фокусной линзы создают конфигурацию оптической системы формирования изображения. Диафрагма 4 управляет количеством светового потока, который проходит сквозь оптическую систему формирования изображения. Узел 2 линзы с переменным фокусным расстоянием, узел 3 фокусной линзы и диафрагма 4 выполнены в цилиндрическом корпусе 31 линзы.
Изображение объекта, которое проходит через оптическую систему формирования изображения, образуется на поверхности захвата изображения датчика 5 изображения и фотоэлектрически преобразуется. Схема 6 захвата изображения принимает электрический сигнал, полученный в результате фотоэлектрического преобразования, выполненного датчиком 5 изображения, и генерирует заранее определенный сигнал изображения, исполняя различные типы процессов формирования изображения. Схема 7 аналого-цифрового преобразования преобразует аналоговый сигнал изображения, генерируемый схемой 6 захвата изображения, в цифровой сигнал изображения.
Память 8 представляет собой память, например буферное запоминающее устройство, которое временно сохраняет цифровой сигнал изображения с аналого-цифрового преобразователя 7. Схема 9 цифроаналогового преобразования считывает сигнал изображения, хранящийся в памяти 8, и преобразует этот сигнал в аналоговый сигнал, а также преобразует сигнал в сигнал изображения в формате, пригодном для воспроизведения. ЖК-дисплей 10 является жидкокристаллическим дисплеем (ЖК) или т.п., который отображает сигнал изображения, полученный в результате преобразования, выполненного цифроаналоговым преобразователем 9. Схема 11 компрессии/декомпрессии считывает сигнал изображения, временно хранящийся в памяти 8, и выполняет процесс компрессии, процесс кодирования, и так далее, и преобразует сигнал в данные изображения в формат, пригодный для хранения в запоминающем устройстве 12. Запоминающее устройство 12 сохраняет данные изображения, обработанные с помощью схемы 11 компрессии/декомпрессии. Схема 11 компрессии/декомпрессии также считывает данные изображения, хранящиеся в запоминающем устройстве 12 и выполняет процесс декомпрессии, процесс декодирования и так далее, и преобразует данные в данные изображения в формат, оптимизированный для воспроизведения и отображения.
В качестве запоминающего устройства 12 можно использовать различные виды памяти. Например, полупроводниковую память, типа флэш-памяти, в виде карты или флэшки, которую можно удалить из устройства, магниточитаемый носитель, например, жесткий диск или гибкий диск или тому подобное.
Схема 13 обработки автоматической экспозиции осуществляет обработку автоматической экспозиции с использованием сигнала изображения с выхода аналого-цифрового преобразователя 7. Между тем, схема обработки автофокусировки на основе сканирования 14, осуществляет обработку автофокусировки с помощью сигнала изображения с выхода аналого-цифрового преобразователя 7.
Процессор (ЦПУ) 15 управляет различными элементами устройства 1захвата изображения и содержит память, используемую для вычислений. Генератор 16 синхронизации (ГС) генерирует заранее определенный синхронизирующий сигнал. Драйвер 17 датчика управляет датчиком изображений 5, на базе синхронизирующего сигнала от ГС 16.
Первая схема 18 приведения в действие двигателя приводит в действие диафрагму 4 с помощью приведения в действие двигателя диафрагмы 21 под управлением ЦПУ 15. Вторая схема 19 приведения в действие двигателя приводит в действие узел 3 фокусной линзы, приводя в действие двигатель 22 фокусировки под управлением ЦПУ 15. Третья схема 20 приведения в действие двигателя приводит в действие узе 2 линзы с переменным фокусным расстоянием, приводит в действие двигатель регулятора 23 переменного фокусного расстояния под управлением ЦПУ 15.
Операционные переключатели 24 оснащаются переключателями различных типов и включают в себя, например, главный выключатель питания, спусковой механизм, переключатель воспроизведения, переключатель регулятора переменного фокусного расстояния, тумблер оптического видоискателя (ОВИ)/электронного видоискателя (ЭВИ), и так далее. Главный выключатель питания представляет собой выключатель для запуска устройства 1 захвата изображения и подачи питания. Спусковой выключатель, выполнен в виде двухступенчатого переключателя, где первое нажатие (SW1) генерирует командный сигнал запуска обработки автоматической экспозиции и обработки автофокусировки, которые запускаются перед ей захвата изображения (операциями записи). Затем, второе нажатие(SW2) генерирует командный сигнал для запуска фактических операций экспозиции. Переключатель воспроизведения запускает операции воспроизведения, тогда как переключатель регулятора запускает операции регулирования переменного фокусного расстояния, осуществляемые путем перемещения узла линзы 2 с переменным фокусным расстоянием оптической системы формирования изображения.
ЭСППЗУ 25 представляет собой запоминающее устройство, которое может быть электрически перезаписано, и заранее хранит программы для выполнения различных типов управления, данные, используемые для выполнения различных типов операций, и так далее. Ссылочная позиция 26 обозначает аккумулятор Коммутатор 27 управляет излучением света вспышки с помощью блока 28 излучения вспышки. Элемент 29 отображения использует светодиод или тому подобное для отображения предупреждений и так далее. Динамик 30 использует аудио для предоставления указаний, предупреждений и так далее.
Блок 33 излучения вспомогательного света автофокусировки сконфигурирован из источника света, например, светодиода, который освещает весь объект или часть объекта при получении оценочного значения автофокусировки (оценочного значения фокуса). Схема 32 приведения в действие вспомогательного освещения автофокусировки приводит в действие блок 33 излучения вспомогательного освещения автофокусировки. Датчик 35 обнаружения дрожания обнаруживает дрожание камеры, а схема 34 обнаружения дрожания обрабатывает сигнал от датчика 35 обнаружения дрожания. Схема 36 распознавания лица принимает выходной сигнал с аналого-цифрового преобразователя 7 и обнаруживает позицию лица на экране, размер и тому подобное.
Основные операции, выполняемые устройством 1 захвата изображения, сконфигурированного таким образом, будут описаны ниже. Сначала, во время захвата изображения, количество света в световом потоке от объекта, который может проходить через цилиндрический корпус 31 линзы устройства 1 захвата изображения регулируется диафрагмой 4, и его изображение формируется на светопринимающей поверхности датчика 5 изображения. Изображение объекта, которое было сформировано, преобразуется в электрический сигнал посредством датчика 5 изображений с помощью процесса фотоэлектрического преобразования, и сигнал выводится на схему 6 захвата изображения. Схема 6 захвата изображения выполняет различные типы обработки сигнала для входного сигнала и генерирует заранее определенный сигнал изображения. Сигнал изображения, выводится на аналого-цифровой преобразователь 7, преобразованный в цифровой сигнал изображения (данные изображения) и временно сохраняется в памяти 8. Данные изображения, сохраненные в памяти 8, выводятся на схему цифроаналогового преобразователя 9 и преобразуются в аналоговый сигнал, преобразованный в сигнал изображения в формате, подходящем для отображения и отображаются на дисплее 10 в виде изображения. Следует отметить, что функция электронного видоискателя (ЭВИ) может быть реализована путем повторения процессов от вывода сигнала изображения посредством датчика 5 изображения до отображения изображения на ЖК-дисплее 10 в каждый заранее определенный интервал времени.
Между тем, данные изображения, сохраненные в памяти 8, также выводятся на схему компрессии/декомпрессии 11. После осуществления процесса компрессии, выполненного схемой компрессии в схеме 11 компрессии/декомпрессии, данные преобразуются в данные изображения в формате, подходящем для хранения, и затем сохраняются в запоминающем устройстве 12.
С другой стороны, данные изображения, оцифрованные аналого-цифровым преобразователем 7, также выводятся на схему 13 обработки автоматической экспозиции, схему автофокусировки на основе сканирования 14, а также схему 36 обнаружения лица, в дополнение к памяти 8. Сначала, схема 13 обработки автоматической экспозиции получает входные данные и выполняет процессы вычисления, такие, как накопительное добавление к значениям яркости в одном экране данных изображения. Благодаря этому, оценочное значение автоматической экспозиции вычисляется на основе яркости объекта. Вычисленное оценочное значение автоматической экспозиции выводится на процессор 15.
Между тем, схема 14 обработки автофокусировки на основе сканирования принимает входные данные изображения и извлекает оттуда высокочастотный компонент с помощью фильтра высоких частот (ФВЧ) или ему подобного, и, кроме того, осуществляет вычислительную обработку, например кумулятивное добавление, и вычисляет оценочное значение автофокусировки, соответствующее величине компонента контура в диапазоне высоких частот. Такая обработка автофокусировки на основе сканирования, как правило, осуществляется на основе данных изображения, соответствующих частичной области экрана, которая была указана в качестве зоны автофокусировки. Зона автофокусировки может быть единственным местом в центральной области или произвольной областью экрана, множеством местоположений в центральной области или произвольной области экрана и прилегающей к ней, множеством дискретно распределенных мест или тому подобным.
Схема 36 обнаружения лиц принимает входные данные изображения, находит характерные области лица на изображении, например, глаза, брови, и т.п., и находит позицию лица человека на изображении. Размер, наклон и т.д. лица также находится из позиционных отношений, например, расстояния между характерными частями лица.
В то же время, заранее определенный синхронизирующий сигнал выводится с ГС 16 на ЦПУ 15, схему 6 захвата изображения и драйвер 17 датчика, и ЦПУ 15 выполняет различные типы управления синхронно с этим синхронизирующим сигналом. Схема 6 захвата изображения принимает синхронизирующий сигнал от ГС 16 и выполняет различные типы обработки изображения, например, разделение цветового сигнала, синхронно с ним. Кроме того, драйвер 17 датчика получает синхронизирующий сигнал от TГ 16 и управляет датчиком 5 изображения синхронно с ним.
ЦПУ 15 также управляет первой схемой 18 приведения в действие двигателя, второй 19 схемой приведения в действие двигателя и третьей 20 схемой приведения в действие двигателя. Приведение в действие диафрагмы 4, узла 3 фокусной линзы и узла 2 линзы с переменным фокусным расстоянием производится с помощью двигателя 21 диафрагмы, двигателя фокуса 22, двигателя 23 регулятора переменного фокусного расстояния, соответственно. Другими словами, ЦПУ 15 осуществляет управление автоматической экспозицией, регулирует диафрагмальное значение диафрагмы 4 до необходимого значения, с помощью приведения в действие двигателя диафрагмы 21 путем управления первой схемой 18 приведения в действие двигателя в зависимости от оценочного значения и т.п., вычисленного с помощью схемы 13 автоматической экспозиции. ЦПУ 15 также осуществляет контроль автофокусировки, передвигая узел 3 фокусной линзы к позиции фокусировки, приводя в действие двигатель 22 фокуса с помощью управления второй схемой 19 приведения в действие двигателя в зависимости от оценочного значения автофокусировки, рассчитанного схемой обработки 14 автофокусировки на основе сканирования. В случае, когда происходит манипуляция с переключателем регулятора переменного фокусного расстояния (не показан) в операционных переключателях 24, ЦПУ 15 в ответ на это осуществляет операции увеличения изображения (операции регулирования переменного фокусного расстояния) оптической системы формирования изображения, которая передвигает узел линзы 2 с переменным фокусным расстоянием, с помощью приведения в действие двигателя 23 регулятора переменного фокусного расстояния путем управления третьей схемой 20 приведения в действие двигателя. В то же время, процесс воспроизведения начинается, когда, например, переключатель воспроизведения (не показан), в операционных переключателях 24, переводится во включенное состояние. Здесь, данные изображения, хранящиеся в запоминающем устройстве 12 в компрессированном состоянии, выводятся на схему 11 компрессии/декомпрессии, подвергаются процессу декодирования, процессу декомпрессии, и т.п. в схеме декомпрессии в схеме 11 компрессии/декомпрессии, и выводятся и временно сохраняются в памяти 8. Эти данные изображения далее выводятся на схему цифроаналогового преобразования 9 и преобразуются в аналоговый сигнал, преобразованный в сигнал изображения в формате, подходящем для отображения, и отображаются на дисплее 10 в виде изображения.
Далее, со ссылкой на Фиг. 2 будет описана конфигурация пикселей, представленных в датчике 5 изображений, показанном на Фиг. 1. Отметим, что хотя на Фиг. 2 показаны четыре пикселя, скомпонованные в вертикальном направлении, в действительности, датчик 5 изображения включает в себя чрезвычайно большое количество пикселей, расположенных в двух измерениях.
Ссылочная позиция 201 обозначает пиксель, который получает свет от цилиндрического корпуса линзы 31; этот пиксель фотоэлектрически преобразует свет, падающий на его поверхность, и выдает результат в виде электрического сигнала. Пиксель 201 включает в себя фотодиод 202, транзистор 203 переноса, усилитель 204 и транзистор 205 сброса. Транзистор переноса 203, и транзистор 205 сброса срабатывают в ответ на сигнал со схемы 206 вертикального сканирования. Схема 206 вертикального сканирования включает в себя регистр сдвига, схему генерирования сигнала, которая генерирует сигналы приведения в действие для транзистора переноса 203 и так далее для приведения в действие соответствующих пикселей, и тому подобное. Управляя транзистором 203 переноса и транзистором 205 сброса с использованием сгенерированных сигналов (TX 1-4, RX 1-4, и так далее) приведения в действие, заряд фотодиода 202 может сбрасываться и считываться, таким образом, можно управлять периодом накопления заряда.
Между тем, схема горизонтального включает в себя регистр сдвига, схему 210 столбцового усилителя, избирательный переключатель 211 выходного сигнала, схему вывода (не показана) для вывода во вне, и тому подобное. Считывание сигналов пикселя может быть усилено путем изменения параметров задания схемы 210 столбцового усилителя посредством сигнала драйвера 17 датчика
Далее, со ссылкой на фиг. 3 и 4 будет описано типовое управление датчиком 5 изображения, с пикселями, расположенными, как показано на Фиг. 2, выполняемое при получении изображения. Фиг. 3 представляет собой временную диаграмму, иллюстрирующую выходные сигналы со схемы 206 вертикального сканирования при получении изображения.
Когда уровень обоих сигналов - сигнала TX (TX 1 по 4) и сигнала RS (RS 1 по 4) в каждом ряду становится высоким, заряд в фотодиоде 202 в каждом пикселе сбрасывается, при этом начинается накопление заряда, когда уровень обоих сигналов TX и RS становится низким. Эта операция выполняется последовательно в соответствии с заранее определенным порядком при условиях, установленных ГС 16. Тогда, после того, как прошел заранее определенный период накопления заряда, уровень сигнала TX снова становится высоким, и заряд в фотодиоде 202 считывается на вход усилителя 204. Сигнал изображения генерируется из сигнала усилителя 204 и выводится через схему 209 горизонтального сканирования. Эта операция также осуществляется при условиях, заданных посредством ГС 16.
В настоящем варианте осуществления, датчиком 5 изображения, предусмотренным в устройстве 1 захвата изображений, является КМОП-датчик изображения. Соответственно, в зависимости от параметров задания регистра сдвига в схеме 206 вертикального сканирования, можно выбрать, в каком порядке управлять транзистором 203 переноса данного ряда; кроме того, тот же самый ряд может быть выбран повторно, а также сигналы, считываемые с него. Кроме того, в зависимости от параметров задания регистра сдвига в схеме 209 горизонтального сканирования, можно выбрать, сигнал какого столбца будет выводится из числа сигналов в том же ряду, заставляя срабатывать избирательный переключатель 211 этого столбца. Благодаря этому, возможно указать, с каких пикселей и в каком порядке будут считываться сигналы.
Фиг. 4 изображает периоды накопления заряда и синхронизацию моментов, в которые накопленные заряды, считываются в виде изображений. Экспонирование и считывание сигналов осуществляются на основе сигналов вертикальной синхронизации сгенерированных ГС 16 и 17 драйвером датчика.
ОБЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ОПЕРАЦИЙ ОБРАБОТКИ ЗАХВАТА ИЗОБРАЖЕНИЙ
Далее обработка захвата изображений будет описана с помощью блок-схемы последовательности процесса, показанной на Фиг. 5, в соответствии с первым вариантом осуществления. Последовательность обработки захвата изображения, описанная далее выполняется, когда главный выключатель питания устройства 1 захвата изображения включен, и режим работы устройства 1 захвата изображения является режимом захвата изображения (записи).
Сначала, на этапе S1, ЦПУ 15 начинает отображение электронного видоискателя, показывая изображение, которое проходит через цилиндрический корпус линзы 31 и образуется на датчике 5 изображения, в дисплее 10. Затем, на этапе S2, ЦПУ 15 подтверждает состояние спускового механизма. Когда спусковой механизм манипулируется пользователем и переключатель SW1 включается, то процесс переходит к этапу S3, где выполняется обработка автоматической экспозиции. Затем, на этапе S4, проводится процесс автофокусировки на основе сканирования. Обработка автофокусировки на основе сканирования будет подробно описана ниже.
Если результат обработки автофокусировки на основе сканирования показывает, что объект съемки может быть сфокусирован, на этапе S5 выполняется отображение сообщения AF OK. Здесь выполняется процесс подсветки элемента 29 дисплея, например, отображающий зеленую рамку на ЖК-дисплее 10, или тому подобное. Однако, в случае, когда не определено, что объект съемки может быть сфокусирован на этапе S4, на этапе S5 выполняется отображение сообщения AF NG. Здесь, к примеру, запускается процесс, заставляющий мигать элемент 29 дисплея, показывая желтую рамку на дисплее 10 или тому подобное. Следует отметить, что поскольку способ имеет возможность производить уведомление пользователя, способ отображения, выполняемый на этапе S5 не ограничивается вышеупомянутыми способами отображения.
Далее, на этапе S6, ЦПУ 15 проверяет состояние переключателя SW2; когда переключатель SW2 включается, процесс переходит к этапу S7, где будет снято изображение, и последовательность обработки захвата изображения заканчивается.
ОБРАБОТКА АВТОФОКУСИРОВКИ НА ОСНОВЕ СКАНИРОВАНИЯ.
Далее, со ссылкой на блок-схему на Фиг. 6 будет описана обработка автофокусировки на основе сканирования на этапе S4. Обратите внимание, что в следующих описаниях, операция получения оценочного значения автофокусировки (оценочного значения фокуса) при перемещении узла 3 фокусной линзы, называется "сканированием", и интервал между позициями узла 3 фокусной линзы для получения оценочного значения автофокусировки называется "интервалом сканирования". Кроме того, диапазон, через который перемещается узел фокусной линзы для получения оценочного значения автофокусировки называется "диапазоном сканирования", и кадр, указывающий область обнаружения фокуса, которая представляет собой область, из которой получается сигнал изображения для получения оценочного значения автофокусировки, называется "кадром автофокусировки".
В настоящем варианте осуществления предполагается, что в случае, когда обнаружение лица было неудачным или размер обнаруженного лица был меньше заранее определенного значения, кадр задается в центральной области экрана или любой области экрана, и на множество мест, прилегающих к ним, как показано на Фиг. 9. На Фиг. 9 показан пример, в котором множество кадров автофокусировки задаются в центральной области и множестве положений, соседних с ней.
Вначале, на этапе S601, на основе результата обнаружения лица схемой 36обнаружения лица выясняется, удалось или не удалось обнаружить лицо, и если да, то будет ли размер обнаруженного лица большим или равным заранее определенному размеру. Процесс переходит к этапу S605 в случае, если была обнаружено лицо, большее или равное заранее определенному значению, после чего выполняется процесс автофокусировки нормального изображения. В случае обнаружения лица, кадр автофокусировки задается на обнаруженное лицо, выполняется сканирование внутри заранее определенного кадра автофокусировки, и достигается позиция в фокусе. Способ для получения позиции в фокусе, выполняемый на этапе S605 будет описан ниже.
В случае, когда было обнаружено лицо, размер кадра автофокусировки сравнивается с размером лица на этапе S605; однако, уменьшая размер кадра автофокусировки, уменьшается объем сигнала при получении оценочного значения автофокусировки и делается невозможным обеспечить точность автофокусировки, и в связи с этим, задается нижний предел размера кадра автофокусировки. Таким образом, объект точечного источника света почти никогда не будет включен в кадр автофокусировки, если обнаруженное лицо достаточно велико, но объект точечного источника света может быть включен в кадр автофокусировки в том случае, когда обнаруженное лицо мало. По этой причине процесс переходит к этапу S602, а не к этапу S605, и в случае, когда лицо не может быть обнаружено, и в случае, когда было обнаружена лицо, но размер лица меньше заранее определенного значения, после чего определяется, присутствует или нет объект точечного источника света.
В случае, когда обнаруженное лицо мало, обнаружение лица было неудачным, или тому подобного, на этапе S602 определяется, имеет ли полученное изображение более низкую яркость, чем заранее определенная яркость, на основе результата обработки автоматической экспозиции, выполненной на этапе S3 на Фиг. 5. Процесс переходит к этапу S605 в случае, когда изображение будет ярче, чем заданный уровень яркости, после чего осуществляется обработка автофокусировки нормального изображения. Поскольку не было обнаружено лицо или обнаруженное лицо мало, позиция в фокусе получается путем сканирования центрального кадра, как показано на Фиг. 9, или путем сканирования любого из множества кадров автофокусировки известным способом, таких как кадры автофокусировки произвольной зоны на экране, заданной пользователем. С другой стороны, в случае, когда изображение будет темнее, чем заранее определенная яркость, определяется, присутствует или нет объект точечного источника света в каждом кадре автофокусировки на этапе S603. Процесс, осуществляемый на этапе S603 будет подробно описан ниже.
В случае, когда результат обнаружения указывает, что объект точечного источника света присутствует в каждом кадре автофокусировки (ДА на этапе S604), регулирование фокуса не может проводиться согласно процессу автофокусировки для нормальных изображений; таким образом, процесс переходит к этапу S609, где выполняется обработка автофокусировки точечного источника света (описанному ниже), после чего процесс переходит к этапу S607.
С другой стороны, в случае, когда результат обнаружения на этапе S603 указывает, что объекта точечного источника света нет ни в одном из кадров автофокусировки (НЕТ на этапе S604), процесс переходит к этапу S606, где выполняется обработка автофокусировки нормального изображения, с помощью которого получается позиция в фокусе с помощью сканирования кадров автофокусировки, где отсутствует объект точечного источника света.
Процесс переходит к этапу S608 в случае, когда фокус может быть отрегулирован до фокусной позиции в любом из кадров автофокусировки на основе оценочного значения автофокусировки, полученного на этапе S605, S606 или S609 (НЕТ на этапе S607). На этапе S608, узел 3фокусной линзы направляется в позиции фокусировки, выбранной из позиций в фокусе кадров автофокусировки, где фокус может быть отрегулирован, в соответствии с заранее определенным алгоритмом. Пример такого алгоритма, например, известен из патента Японии N 02620235; если описать кратко, то ближайшая позиция в фокусе выбирается из сфокусированных позиций объектов, которые не определены как препятствие на переднем плане кадра. С другой стороны, в случае, когда фокус не может быть отрегулирован в любом из кадров автофокусировки (ДА на этапе S607), то процесс переходит к этапу S610, на котором узел 3 фокусной линзы управляется до позиции фокусной линзы, называемой гиперфокальной позицией, где узел 3 фокусной линзы фокусируется на ближайшую позицию глубины резкости, которое включает в себя бесконечность на дальней стороне поля.
ОПРЕДЕЛЕНИЕ ОБЪЕКТА ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА.
Далее будут описаны операции определения объекта точечного источника света, осуществляемые на этапе S603. Например, если предположить, что кадры автофокусировки задаются, как показано на Фиг. 9, присутствие объекта точечного источника света в этих кадрах автофокусировки определяется с использованием гистограммы, выражающей распределение яркости в кадрах автофокусировки. Операционная процедура показана на Фиг. 7.
Сначала на этапе S701 в качестве первого кадра задается позиция кадра автофокусировки для нахождения гистограммы, выражающей распределение яркости (кадр 00 на Фиг. 9). Далее, на этапе S702, генерируется гистограмма в кадре автофокусировки, который был задан. Здесь, "гистограмма" генерируется за счет процессов получения значения яркости для каждого пикселя, включенного в кадр автофокусировки, для которого должна быть сгенерирована гистограмма, и затем определяется количество пикселей с каждым значением яркости. В том случае, когда значения яркости после аналого-цифрового преобразования, находятся, например, в пределах от 0 до 255, гистограмма генерируется путем получения числа пикселей с каждым значением яркости от 0 до 255.
Затем, на этапе S703, количество пикселей, яркость которых ниже заранее определенного значения яркости, берется из сгенерированной гистограммы, и это число берется как число пикселей низкой яркости NumBlightLow. Затем, на этапе S704, из гистограммы получается количество пикселей, яркость которых выше заранее определенного значения яркости, и это число берется в качестве числа пикселей высокой яркости NumBlightHigh. Далее, на этапе S705, находятся гистограмма Yp и гистограмма ММ. Операции нахождения гистограммы Yp и гистограммы ММ будут описаны здесь со ссылкой на Фиг. 8. Сначала, на этапе S801, получают общее количество пикселей в пределах кадра автофокусировки, для которого была сгенерирована гистограмма. Это число полагается равным NumHistPixs. Далее, на этапе S802, находится порог ThrNumHist для ряда пикселей, значения яркости которых полагаются действительными, путем нахождения результата отношения общего числа пикселей NumHistPixs к ThrRatio - числу пикселей, предполагаемых действительными. Порог ThrNumI используется для того, чтобы исключить значения яркости, вызванные шумом и тому подобное. После нахождения порога ThrNumHist значения яркости повторно задаются в 0 на этапе S803, и выполняется определение того, является или нет каждое значение яркости допустимым значением яркости в порядке, начиная со значения яркости равного 0.
На этапе S804, с использованием гистограммы получают число пикселей, имеющих значение яркости подлежащее определению, а затем полученное число пикселей сравнивается с порогом ThrNumHist. В случае, когда число больше или равно пороговому значению, то значение яркости берется в качестве действительного значения яркости на этапе S805, тогда как в случае, когда число меньше порогового значения ThrNumHist, значение яркости берется в качестве недействительного значения яркости, возникшего вследствие шума и т.п., и не используется при нахождении гистограммы Yp и гистограммы MM. На этапе S806 определяется, является ли значение яркости, которое подлежит определению пиковым значением (например, 255), если значение яркости не является пиковым значением, то процесс переходит к этапу S807, после чего следующее наибольшее значение яркости берется в качестве значения яркости, которое подлежит определению и процесс возвращается к этапу S804. Когда на этапе S806 определяется, что значение яркости, подлежащее определению, представляет собой максимальное значение, то процесс переходит к этапу S808, где находятся действительные максимальное значение и минимальное значение яркости. На этапе S809, максимальное значение из значений яркости, определенных в качестве допустимых, записывается как значение гистограммы Yp и на этапе S810, в качестве значения гистограммы ММ записывается разница между пиковым значением и минимальным значением яркости, определенных в качестве допустимых. Затем процедура переходит к этапу S707 на Фиг. 7.
После нахождения четырех показателей, а именно NumBlightLow, NumBlightHigh, гистограммы Yp и гистограммы ММ, путем обработки, описанной далее, определяется, удовлетворяют или нет эти показатели соответствующим заранее определенным условиям. В случае, когда все показатели отвечают условиям, то определяется, что кадр автофокусировки включает в себя объект - точечный источник света. Другими словами, предполагается, что кадр включает в себя объект - точечный источник света в случае, когда существует множество областей низкой яркости, не меньше некоторого количества областей высокой яркости, причем области высокой яркости являются достаточно яркими, а контраст высоким. Сначала, на этапе S707, определяется, превышает ли сумма числа NumBlightLow пикселей низкой яркости и числа NumBlightHigh пикселей высокой яркости заранее заданное количество пикселей (NumHighLowPixs), и процесс переходит к этапу S708, если сумма превышает заранее заданное число, и к этапу S712, если сумма не превышает заранее определенного числа. Далее, на этапе S708, выясняется, превышает ли количество пикселей NumBlightHigh высокой яркости заранее определенное количество пикселей (NumHighPixs), и процесс переходит к этапу S709, если число больше заранее определенного числа и к этапу S712, если число не превышает заранее определенного числа. На этапе S709 выясняется, превышает ли значение гистограммы Yp заданное значение, и процесс переходит к этапу S710, когда значение гистограммы Yp больше, чем заданное значение, и к этапу S712, когда значение гистограммы Yp не больше заранее определенного значения. Далее, на этапе S710, определяется, является ли значение гистограммы ММ больше, заранее определенного значения (ММО), и процесс переходит к этапу S711, когда значение гистограммы ММ больше заранее определенного значения, и к этапу S712, когда значение гистограммы ММ меньше заранее определенного значения. В случае, когда все условия были выполнены на этапах с S707 по S710, определяется что объект - точечный источник света присутствует в этом кадре автофокусировки, и что этот кадр автофокусировки определен, как содержащий объект - точечный источник света на этапе S711. На этапе S712 определяется, завершено ли определение для всех кадров автофокусировки. В случае, когда кадры автофокусировки заданы, как показано на Фиг. 9, определение выполняется от кадра 00, к кадру 01, к кадру 02, к кадру 10, и так далее к кадру 21 и кадру 22; таким образом, в этом случае, выясняется, закончилось или нет определение для кадра 22. В случае, когда определение не закончилась для всех кадров автофокусировки, процесс переходит к этапу S713, где для определения задается следующий кадр и повторяется вышеупомянутая обработка. Если определение в кадре 00 закончилось, кадр 01 задается для последующего определения; если определение в кадре 01 закончилось, для последующего определения задается кадр 02; и так далее. Когда определение для всех кадров автофокусировки заканчивается, процедура переходит к этапу S604 на Фиг. 6.
ОБРАБОТКА АВТОФОКУСИРОВКИ ДЛЯ НОРМАЛЬНОГО ИЗОБРАЖЕНИЯ.
Далее, с использованием Фиг. 10 и 11 будет описана обработки автофокусировки для нормального изображения на этапе S605 и этапе S606.
Сначала со ссылкой на Фиг. 10 будет описан способ получения сигнала изображения, используемый для обработки автофокусировки в соответствии с первым вариантом осуществления. В настоящем первом варианте осуществления, по меньшей мере, одно из условия экспозиции или скорости восприятия управляется независимо для пикселей для отображения в датчике 5 изображений для получения изображения электронного видоискателя и для пикселей обнаружения фокуса в датчике 5 изображений для обработки автофокусировки, в то время как сигналы от пикселей для отображения и пикселей обнаружения фокуса, полученные в результате этого независимого управления, могут быть получены параллельно. Соответственно, в первом варианте осуществления, соответствующие условия экспозиции для сигнала электронного видоискателя (отображения) и сигнала автофокусировки (обнаружения фокуса) задаются в период двух строк, причем повторное задание и передача с выхода датчика 5 изображения выполняются в разные моменты синхронизации. Однако, в зависимости от яркости объекта во время захвата изображения, оптимальные условия экспозиции могут быть одинаковыми для обоих, и в этом случае повторное задание и передача выходного сигнала выполняются в один тот же момент синхронизации. Для того чтобы получить сигнал электронного видоискателя, устанавливаются условия экспозиции, и, в особенности, период накопления заряда, с учетом размера экспозиции, панорамирования, отслеживания движения объекта, и так далее, что является оптимальным для способности пользователя видеть объект. С другой стороны, для сигнала автофокусировки, определяются условия экспозиции, и особенно, период накопления заряда, с учетом размера экспозиции, синхронизации автофокусировки, движения объекта во время автофокусировки, влияние дрожания фотокамеры на проведение процесса автофокусировки, и так далее, которые являются оптимальными для автофокусировки на основе сканирования, в случае, когда отсутствует объект точечного источника света, подобный источнику освещения.
Период накопления заряда для электронного видоискателя задается, например, в пределах 1/8 секунды со стороны медленной скорости затвора и минимального периода накопления заряда, определенного на основе возможностей датчика 5 изображения, в качестве предела со стороны быстрой скорости затвора, и значения диафрагмы и схемы 210 столбцового усилителя регулируются, ссылаясь на результат обработки автоматической экспозиции, выполненный на этапе S3, устанавливая уровень экспозиции на соответствующий уровень. Между тем, период накопления заряда для автофокусировки устанавливается, например, равным 1/32 секунды на стороне медленной скорости затвора, и минимального периода накопления заряда, определенного на основе возможностей датчика изображения 5, в качестве предела со стороны быстрой скорости затвора, и значения диафрагмы 4 и схемы столбцового усилителя 210 регулируются, ссылаясь на результат обработки автоматической экспозиции, выполняемый на этапе S3, задавая соответствующий уровень экспозиции. Соответственно, период накопления заряда, заданный при низкой освещенности короче для автофокусировки, чем для электронного видоискателя, и в результате скорость восприятия для автофокусировки быстрее. Например, период накопления заряда автофокусировки принимается равным 1/32 секунды (скорость считывания 32 кадра в секунду), а период накопления заряда для изображения электронного видоискателя принимается равным 1/8 секунды (скорость считывания 8 кадров в секунду), при равных значениях диафрагмы 4.
Как только были заданы условия экспозиции {период накопления заряда), задаются сигналы TX и сигналы RS, как указано в Фиг. 10. Фиг. 10 представляет собой схему синхронизации, иллюстрирующую сигналы, генерируемые схемой 206 вертикального сканирования, с целью получения сигналов для электронного видоискателя и автофокусировки.
На Фиг. 10, когда уровни обоих сигналов - сигнала TX (ТХ 1 по 4), и сигнала RS (RS с 1 по 4) в каждой строке становятся высокими, заряд фотодиода 202 в каждом пикселе сбрасывается, в свою очередь начинается накопление заряда, когда уровень обоих сигналов TX и сигнала RS становится низким. Эта операция выполняется последовательно в соответствии с заданным порядком в режиме, установленном ГС 16. Затем, в строке автофокусировки, значения сигналов TX1 и TX2 становятся последовательно высокими после того, как прошел заданный период накопления заряда; заряд фотодиода 202 считывается с усилителя 204, выводится через схему горизонтального сканирования 209 и в результате получается сигнал автофокусировки. Затем, уровни сигналов TX1 и RS1, а затем TX2 и RS2 оба становятся последовательно высокими, и строка автофокусировки сбрасывается. Эта операция повторяется для того, чтобы получить сигнал автофокусировки. Между тем, в строке электронного видоискателя, уровень сигналов TX3 и TX4 становится последовательно высоким после того, как истек заранее определенный период накопления заряда; заряд на фотодиоде 202 считывается с усилителя 204 и выводится через схему 209 горизонтального сканирования. В результате, получается изображение в электронном видоискателе. Далее, с использованием Фиг. 11 будет описан способ автофокусировки на основе сканирования для нахождения позиции в фокусе на основе сигнала автофокусировки, полученного датчиком 5 изображения в течение периода двух строк, как уже упоминалось выше. Автофокусировка на основе сканирования - это процесс, который находит позиция узла 3 фокусной линзы, в котором высокочастотные компоненты, извлеченные из сигнала автофокусировки, являются наиболее многочисленными, и производится в кадре автофокусировки на базе кадра автофокусировки.
ЦПУ 15 управляет двигателем фокуса посредством второй схемы приведения в действие двигателя 19, которая управляет приведением в действие двигателя 22 фокуса. Благодаря этому, узел 3 фокусной линзы выводится из позиции, соответствующей бесконечности ("А" на Фиг. 11) до позиции, соответствующей наиболее близкому расстоянию, заданному для каждого режима восприятия изображения ("В" на Фиг. 11). В ходе этого управления получены оценочные значения фокуса, которые выводятся со схемы 14 автофокусировки на основе сканирования, и, когда приведение в действие узла 3 фокусной линзы заканчивается, находится позиция узла 3 фокусной линзы, при которой полученное оценочное значение автофокусировки максимально, или, другими словами, находится позиция в фокусе ("C" на Фиг. 11).
Следует отметить, что достижение оценочного значения автофокусировки со схемы 14 автофокусировки на основе сканирования осуществляется с заданным интервалом сканирования, а не при всех позициях узла 3 фокусной линзы в целях ускорения автофокусировки на основе сканирования. Например, на Фиг. 11 показано оценочное значение автофокусировки, полученное в позициях А1, A2 и A3. В этом случае, оценочное значение автофокусировки не найдено в положении С, и, таким образом, позиция фокусировки C рассчитывается от точки, где полученное оценочное значение автофокусировки достигает максимума и точек перед ней и после нее. Посредством такой интерполяции оценивается достоверность оценочного значения автофокусировки, прежде, чем найти позицию фокусировки с пиковым оценочным значением автофокусировки ("C" на Фиг. 11). Патенты Японии N 04235422 и патент Японии N 04185741 раскрывают конкретные примеры такого способа, и, таким образом, их описание здесь будет опущено.
Обработка автофокусировки нормального изображения, осуществленная на этапе S605, осуществляется во всех кадрах автофокусировки, заданных для автофокусировки на основе сканирования, как описано выше, и, если их достоверность достаточна, то в каждом кадре автофокусировки, находится позиция в фокусе, где оценочное значение автофокусировки будет пиковым. Однако, процесс нахождения точки, где оценочное значение автофокусировки максимально не проводится для кадров автофокусировки, достоверность которых является недостаточной.
На этапе S606, вышеупомянутая автофокусировка на основе сканирования осуществляется только для кадров автофокусировки, для которых было определено, что может осуществляться обработка автофокусировки нормального изображения. На этапе S605, находится позиция в фокусе, при которой оценочное значение автофокусировки будет пиковым, если достоверность обработанного кадра автофокусировки достаточна, тогда как процесс нахождения позиции в фокусе, где оценочное значение автофокусировки максимально, не выполняется для кадра автофокусировки, достоверность которого недостаточна.
В случае, когда достоверность любого из кадров автофокусировки достаточна в процессе шага S605 или шага S606 (НЕТ на этапе S607 на Фиг. 6), происходит отображение сообщения AF ОК осуществляется на этапе S5 Фиг. 5. С другой стороны, в случае, когда результат оценки достоверности оценочного значения фокуса во всех кадрах автофокусировки показывает, что достоверность всех кадров автофокусировки низкая (ДА на этапе S607 на Фиг. 6),происходит отображение сообщения AF NG на этапе S5 на Фиг. 5.
ОБРАБОТКА АВТОФОКУСИРОВКИ ТОЧЕЧНОГО ИСТОЧНИКА СВЕТА.
Далее, с использованием фиг. 12 и 13 будет описана обработка автофокусировки точечного источника света, осуществляемая на этапе S609.
Таким же образом, как и при обработке автофокусировки нормального изображения, параллельно формируются сигнал датчика 5 изображения для получения изображения в электронном видоискателе и сигнал датчика 5 изображения для выполнения обработки автофокусировки, при различных условиях экспозиции на разных скоростях считывания при обработке автофокусировки точечного источника света.
При обработке автофокусировки точечного источника света, а также, для сигнала электронного видоискателя, условия экспозиции и, особенно, период накопления заряда, определяются с учетом уровня экспозиции оптимального для способности пользователя видеть объект в темноте, а также панорамирования, отслеживания движения объекта, и так далее. С другой стороны, для сигнала автофокусировки, условия экспозиции, и, особенно, период накопления заряда, определяются с учетом синхронизации автофокусировки, движения объекта во время автофокусировки, влияния дрожания фотокамеры на проведение процесса автофокусировки, и оптимального уровня экспозиции для автофокусировки на основе сканирования, после захвата объекта точечного источника света, например, источника освещения.
При обработке автофокусировки точечного источника света, период накопления заряда электронного видоискателя, значение диафрагмы 4, и значение схемы 210 столбцового усилителя регулируются, и со ссылкой на результат обработки автоматической экспозиции на этапе S3, задается соответствующий уровень экспозиции для случая захвата объекта точечного источника света, например, источника освещения. Затем, задается период накопления заряда автофокусировки таким образом, чтобы уровень экспозиции уменьшился до меньшего значения, чем соответствующая экспозиция электронного видоискателя, на основе соотношения объекта точечного источника света.
В частности, уровень экспозиции уменьшается, как показано ниже на основе соотношения числа NumBlightHigh пикселей высокой яркости к общему числу пикселей.
Примерно в 50% или более, автоматическая экспозиция происходит в области, занимаемой объектом - точечным источником света, и, таким образом, можно сказать, что уровень экспозиции подходит для объекта точечного источника света и почти нет присутствия насыщенных пикселей. По мере того как падает число пикселей, занимаемых объектом точечного источника света, делается попытка получить соответствующий уровень экспозиции для всего экрана; уровень экспозиции увеличивается под влиянием темных зон рядом с объектом точечного источника света, в результате чего объект - точечный источник света становится переэкспонированным. Таким образом, объект - точечный источник света будет иметь подходящий уровень экспозиции, если уровень экспозиции в этой зоне уменьшен. По этой причине, уровень экспозиции не уменьшается в случае, когда отношение пикселей высокой яркости больше или равно 50%, но снижается, по мере снижения соотношения пикселей высокой яркости. Уровень экспозиции уменьшается на один шаг каждый раз, когда отношение пикселей высокой яркости равно половине.
Уровень экспозиции для автофокусировки установлен ниже, чем соответствующий уровень экспозиции для электронного видоискателя при захвате объекта точечного источника света по следующим причинам. С уровнем экспозиции для электронного видоискателя, пиксели принимающие свет от точечного источника света, например, источника освещения, станут насыщенными, и, таким образом оценочное значение автофокусировки достигнет своего пикового значения при неправильной позиции в фокусе, но при положении узла 3 фокусной линзы перед и после этой упомянутой позиции в фокусе, как указано с помощью соответствующей кривой экспозиции 1201, показанной на Фиг. 12. В результате, правильная позиция в фокусе не может быть получена. Соответственно, в течение автофокусировки, уровень экспозиции уменьшается, и путем сканирования может получиться такая кривая оценочного значения автофокусировки, какая указана посредством недоэкспонированной кривой 1202 на Фиг. 12. Соответственно, период накопления заряда для автофокусировки короче периода накопления заряда для электронного видоискателя при низкой освещенности, и в результате, скорость считывания для автофокусировки быстрее. Например, период накопления заряда автофокусировки принимается равным 1/128 секунды (скорость считывания 128 кадров в секунду), период накопления заряда для изображения, отображаемого на дисплее берется равным 1/32 секунды (скорость считывания 32 кадров в секунду). Значения диафрагмы 4 равны, полностью открыты при низкой освещенности, например в случае, захвата объекта точечного источника света, например, источника освещения.
Как только заданы условия экспозиции (период накопления заряда), управляются сигналы TX и сигналы RS как показано на Фиг. 13. Фиг. 13 представляет собой временную диаграмму, изображающую сигналы, генерируемые схемой вертикального сканирования 206 для получения сигнала электронного видоискателя и автофокусировки.
На Фиг. 13, когда уровень обоих сигналов TX (с TX1 по TX4) и RS (с RS1 по RS4) в каждом ряду становится высоким, заряд фотодиода 202 в каждом пикселе сбрасывается, в то время как накопление заряда начинается, когда уровень обоих сигналов TX и RS становится низким. Эта операция выполняется последовательно в соответствии с заранее определенным порядком в режиме, заданном ГС 16. Тогда, в ряду автофокусировки, уровень сигналов TX1 и TX2 становится высоким последовательно после того, как заданный период накопления заряда прошел; заряд фотодиода 202 считывается из усилителя 204, выводится через схему 209 горизонтального сканирования и в результате получается сигнал автофокусировки. Затем, уровни сигналов TX1 и RS1, а затем TX2 и RS2, оба стали высокими последовательно, и ряд автофокусировки задается повторно. Эта операция повторяется для того, чтобы получить сигнал автофокусировки. Между тем, в строке для электронного видоискателя, уровень сигналов TX3 и TX4 становится высоким последовательно после того, как прошел заранее определенный период накопления заряда; заряд в фотодиода 202 считывается с усилителя 204 и выводится через процессор 209 горизонтального сканирования. В результате получается сигнал изображения электронного видоискателя.
Далее, с использованием Фиг. 12 будет описан способ автофокусировки точечного источника света на основе сканирования, с помощью которого находится позиция в фокусе на базе сигнала автофокусировки, полученного с датчика 5 изображения в течение периода сканирования двух строк как описано выше.
ЦПУ 15 управляет двигателем 22 фокуса посредством второй схемы приведения в действие двигателя 19, которая управляет приведением в действие двигателя 22 фокуса. Благодаря этому, узел 3фокусной линзы приводится в движение из позиции, соответствующей бесконечности ("А" на Фиг. 12) в позицию, соответствующую ближайшему расстоянию, установленному для каждого режима восприятия изображения ("В" на Фиг. 12). Оценочные значения автофокусировки, которые являются выводом схемы 14автофокусировки на основе сканирования, получаются в ходе этого приведения в действие, и, когда приведение в действие узла 3 фокусной линзы заканчивается, находится позиция, в которой оценочное значение автофокусировки максимально ("С" в Фиг. 12), на основе полученного оценочного значения автофокусировки.
Следует отметить, что получение выходного значения со схемы 14автофокусировки на основе сканирования осуществляется с заранее определенным интервалом сканирования, а не на всех позициях узла 3 фокусной линзы в целях ускорения автофокусировки на основе сканирования. Например, оценочное значение автофокусировки, полученное в позициях a1, a2 и a3, показаны на Фиг. 12. В таком случае, позиция в фокусе С рассчитывается от точки, где оценочное значение представляет собой максимальное значение, и точки перед ней и после него. Обратите внимание, что достоверность оценочного значения автофокусировки оценивается, перед нахождением точки с пиковым оценочным значением автофокусировки ("C" на Фиг. 12) посредством такой интерполяции, таким же образом, как и при процессе автофокусировки нормального изображения.
Этот процесс осуществляется на всех кадрах автофокусировки, заданных для автофокусировки на основе сканирования, как описано выше, и если достоверность достаточна в любом из кадров автофокусировки (НЕТ на этапе S607 на Фиг. 6), то находится позиция в фокусе с пиковым оценочным значением автофокусировки. Процесс нахождения позиции в фокусе, где оценочное значение автофокусировки максимально не выполняется для кадров автофокусировки, достоверность которых недостаточна. Когда достоверность любого из кадров автофокусировки достаточна, производится отображение сообщения AF ОК на этапе S5 на Фиг. 5.
С другой стороны, при обработке автофокусировки точечного источник света, обработка автофокусировки осуществляется с помощью сигнала электронного видоискателя в случае, когда достоверность низкая во всех кадрах автофокусировки. Это происходит потому, что при выполнении автофокусировки с использованием результата сигнала автофокусировки при низкой достоверности всех кадров автофокусировки, существует вероятность того, что объект, который не является точечным источником света был ошибочно определен как объект - точечный источник света. Соответственно, автофокусировка осуществляется с помощью сигнала электронного видоискателя, который имеет соответствующий уровень экспозиции для объекта, который не является точечным источником света.
В случае, когда объект - точечный источник света определяется ошибочно и уровень экспозиции для сигнала электронного видоискателя является приемлемым, сканирование даст в результате оценочное значение автофокусировки, например, такое, которое обозначено кривой 1202 на Фиг. 12, для случая недостаточной экспозиции, получаемое из сигнала электронного видоискателя.
Однако, узел 3 фокусной линзы управляется таким образом, чтобы интервал сканирования оптимизировался на скорости считывания для сигнала автофокусировки, и, таким образом, интервал сканирования может быть слишком широким на скорости считывания для сигнала электронного видоискателя, и не может быть получена точная позиция максимума оценочного значения автофокусировки. Например, полученная позиция максимума, обозначенная d на Фиг. 12 может быть смещена от правильной позиции максимума С. Размер этого сдвига Δ можно оценить как примерно половину интервала сканирования, когда позиция максимума оценочного значения автофокусировки находится с использованием сигнала электронного видоискателя (d на Фиг. 12). Соответственно, диапазон, равный, примерно в четырем величинам сдвига Δ (4Δ) от позиции максимума, которая была найдена (d на Фиг. 12) как являющаяся центром, задается как диапазон сканирования, причем сканирование выполняется снова в заданном диапазоне 4Δ, и находится более точная позиция максимума оценочного значения автофокусировки (С на Фиг. 12).
Например, в случае, когда скорость считывания для сигнала автофокусировки составляет 128 кадров в секунду, а скорость считывания для сигнала электронного видоискателя составляет 32 кадра в секунду, величина сдвига Δ может быть оценена в глубину около 10, и, таким образом диапазон сканирования может быть установлен на глубину ±20 от точки d на Фиг. 12, являющейся центром.
Сигнал электронного видоискателя и сигнал автофокусировки получаются параллельно при различных условиях экспозиции и различной скорости считывания в это время, вдобавок, условия экспозиции для обоих сигналов заданы на период двух строк, и синхронизация моментов сброса и передачи выходного сигнала с датчика изображений обусловлены отличаться. Способ определения синхронизации является таким же, как на этапе 605 и этапе S606.
При повторном сканировании, ЦПУ 15 управляет двигателем фокуса 22 посредством второй схемы 19 приведения в действие двигателя и управляет узлом 3 фокусной линзы от начальной позиции сканирования ("a" на Фиг. 12) к конечной позиции сканирования("b" на Фиг. 12). В течение этого прохождения оценочные значения автофокусировки получаются со схемы 14 автофокусировки на основе сканирования и, когда движение узла 3 фокусной линзы закончено, из полученного оценочного значения автофокусировки находится сфокусированная позиция с пиковым полученным оценочным значением автофокусировки на Фиг. 12.
Как и для других автофокусировок на основе сканирования, достоверность оценочного значения автофокусировки также оценивается в этом случае, перед нахождением позиции в фокусе. Достоверность определяется для всех отсканированных кадров автофокусировки; если достоверность достаточна для любого из кадров автофокусировки, позиция в фокусе находится по этому кадру автофокусировки, в то время как процесс нахождения позиции в фокусе не проводится для кадров автофокусировки достоверность которых недостаточна. В случае, когда достоверность любого из кадров автофокусировки достаточна(НЕТ на этапе S607 на Фиг. 6), выполняется отображение сообщения AF ОК на этапе S5 на Фиг. 5, в то время как в случае, когда достоверность всех кадров автофокусировки низкая (ДА на этапе S607) на Фиг. 6), выполняется отображение сообщения AF NG на этапе S5 на Фиг. 5.
Следует обратить внимание, что в случае, когда пользователем задана одноточечная автофокусировка, или в случае, когда кадр автофокусировки задан на позицию лица, обнаруженного с помощью автофокусировки лица при обработке автофокусировки на этапе S605, вышеупомянутая обработка может быть осуществлена только в этом кадре. Здесь, "одноточечная автофокусировка" относится к автофокусировке, с использованием одного кадра в центре или автофокусировке с помощью одного произвольного кадра, указанного пользователем.
В соответствии с первым вариантом осуществления, как описано до настоящего момента, используются сигналы электронного видоискателя и автофокусировки, полученные параллельно при различных условиях экспозиции, и, таким образом, может осуществляться более точное регулирование фокуса при сохранении качества изображения в электронном видоискателе даже в тех случаях, например, когда объект точечного источника света и нормальный объект присутствуют вместе.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ.
Далее будет описан второй вариант осуществления настоящего изобретения. Второй вариант осуществления отличается от вышеупомянутого первого варианта осуществления тем, что проводится процесс грубого регулирования автофокусировки (непрерывная автофокусировка) перед включением SW1 (то есть, перед командой подготовки захвата изображения). Эта непрерывная автофокусировка выполняется перед определением того, присутствует ли точечный источник света в кадре автофокусировки, как будет описано позже. Следует отметить, что конфигурация устройства 1 захвата изображения является такой же, как показано на Фиг. 1 и 2, и, таким образом, его описание будет опущено.
ОБЩАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ОБРАБОТКИ ЗАХВАТА ИЗОБРАЖЕНИЯ.
Обработка захвата изображений в соответствии со вторым вариантом осуществления будет описана с помощью блок-схемы, показанной на Фиг. 14.
Как и в первом варианте осуществления, последовательность захвата обработки изображений выполняется, когда главный выключатель питания устройства 1 захвата изображения включен, и режим работы устройства захвата изображения является режимом захвата изображения (записи).
Сначала на этапе S1401 выполняется обработка автоматической экспозиции, и, как описано в первом варианте осуществления со ссылкой на Фиг. 10, находятся уровень экспозиции, соответствующий изображению электронного видоискателя и уровень экспозиции, соответствующий проведению процесса автофокусировки, и датчик 5 изображения управляется с тем, чтобы принять на себя этот уровень экспозиции.
Далее, на этапе S1402, дисплей электронного видоискателя запускается таким же образом, как и в первом варианте осуществления. В это время ЦПУ 15 управляет приемом датчиком 5 изображения уровня экспозиции, найденного на этапе S1401. Кроме того, на этапе S1403, осуществляется непрерывная обработка автофокусировки, и узел 3 фокусной линзы приводится к грубой позиции в фокусе. Этот процесс будет описан ниже.
Затем, на этапе S1404 ЦПУ 15 проверяет состояние спускового механизма; когда спусковой механизм является манипулируемым пользователем, и включается переключатель SW1, процесс переходит к этапу S1405, где выполняется проведение процесса автоматической экспозиции. Затем, на этапе S1406 проводят процесс автофокусировки на основе сканирования. Этот процесс будет описан ниже.
Если результат обработки автофокусировки на основе сканирования указывает, что кадр находится в фокусе, то выполняется отображение сообщения AF ОК на этапе S1407. Здесь осуществляется процесс подсветки элемента 29 индикации, например, отображения зеленой рамки на ЖК дисплее 10. Однако, в случае, когда кадр не в фокусе на этапе S1406, осуществляется вывод сообщения AF NG на этапе S1407. Здесь выполняется процесс в результате, которого элемент 29 индикации мигает, показывая например, желтую рамку на дисплее 10, или тому подобное. Следует обратить внимание, что в течение всего времени, пока способ может выдавать уведомления пользователю, способ отображения, выполняемый на этапе S1407, не ограничивается вышеупомянутыми способами отображения.
Далее на этапе S1408, ЦПУ 15 подтверждает состояние SW2; когда SW2 включается, процесс переходит к этапу S1409, на котором изображение захватывается, и последовательность обработки захвата изображения заканчивается.
ОБРАБОТКА НЕПРЕРЫВНОЙ АВТОФОКУСИРОВКИ.
Далее со ссылкой на блок-схему на Фиг. 15 будет описана обработка непрерывной автофокусировки на этапе S1403. Следует отметить, что управление датчиком 5 изображений при этой обработке осуществляется в соответствии с распределением временных интервалов на временной диаграмме, показанной на Фиг. 10.
При запуске процесса непрерывной обработки автофокусировки, на этапе S1501, проводятся операции точного приведения в действие, и определяется, находится ли кадр в фокусе, или если кадр не в фокусе, в каком направлении находится позиция в фокусе. "Точное приведение в действие" представляет собой операцию, при которой узел 3фокусной линзы проводится в действие в направлении ближайшей границы или направлении на бесконечность на небольшие величины (величины, при которых изменения фокуса не видны на изображении в электронном видоискателе), и то, находится ли кадр в фокусе /или вне фокуса и в каком направлении узел 3 фокусной линзы должен перемещаться, чтобы кадр попала в фокус, определяется из полученного оценочного значения автофокусировки.
На этапе S1502, в случае, если определено, что кадр находится в фокусе, процесс переходит к этапу S1508, где выполняются операции для состояния в фокусе, в то время как в случае, когда определено, что кадр не в фокусе, процесс переходит от шага S1502 к этапу S1503. Если на этапе S1503 определено, что направление фокусировки успешно определено на этапе S1501, процесс переходит к этапу S1504,тогда как, если направление фокусировки не было успешно определено на этапе S1501, то процесс возвращается к этапу S1501 и точное приведение в действие продолжается. На этапе S1504, узел 3 фокусной линзы быстро приводится в действие посредством быстрого приведения в действие поиска максимума в направлении возрастания оценочного значения автофокусировки. “Приведение в действие поиска максимума" представляет собой сканирование, которое отыскивает позицию в фокусе при изменении интервала сканирования в соответствии со степенью фокусировки во время приведения в действие поиска максимума. Сканирование осуществляется при сравнительно грубом интервале сканирования на глубине от 5 до 10 в случае, когда степень фокусировки низкая; интервал сканирования затем уменьшают, по мере того, как степень фокусировки увеличивается, и сканирование осуществляется в сравнительно узком интервале сканирования на глубину от 2 до 4 вблизи позиции в фокусе. Если на этапе S1505 определено, что оценочное значение автофокусировки превысило пиковое, процесс переходит к этапу S1506, тогда как процесс возвращается к этапу S1504 и приведение в действие поиска максимума продолжается в случае, когда не определено, что оценочное значение автофокусировки превысило пиковое значение.
На этапе S1506, позиция узла 3фокусной линзы возвращается в позицию, в которой оценочное значение автофокусировки было пиковым во время приведения в действие поиска максимума. На этапе S1507, определяется, вернулся ли узел 3 фокусной линзы в позицию, где оценочное значение автофокусировки было пиковым; процесс возвращается к этапу S1501, на котором снова осуществляется точное приведение в действие, в случае, когда в оценочное значение автофокусировки вернулось к пиковой позиции, при этом процесс возвращается к этапу S1506, на котором продолжаются операции возврата к пику, в случае, когда в оценочное значение автофокусировки не вернулось в пиковую позицию.
Далее, будет описан процесс перезапуска определения фокусной позиции, осуществляемый после того, как было определено, что кадр находится в фокусе на этапе S1502. На этапе S1508, проводится удержание оценочного значения автофокусировки, когда было определено, что кадр находится в фокусе. На этапе S1509, получается обновленное оценочное значение автофокусировки при том же положении узла 3 фокусной линзы. На этапе S1510, оценочное значение автофокусировки, удерживаемое на этапе S1508 сравнивается с оценочным значением автофокусировки вновь полученным на этапе S1509: перезапуск предполагается в случае, когда разница между ними больше или равна заранее определенному уровню, после чего процесс возвращается к этапу S1501 и будут возобновлены операции точного приведения в действие. В противоположность этому, в случае, когда перезапуск не был определен на этапе S1510, процесс переходит к этапу S1511, где узел 3 фокусной линзы останавливается в том положении как есть, процесс возвращается к этапу S1509, и определение перезапуска продолжается.
ОБРАБОТКА АВТОФОКУСИРОВКИ НА ОСНОВЕ СКАНИРОВАНИЯ.
Далее, со ссылкой на блок-схему на Фиг. 16. будет описана обработка автофокусировки на основе сканирования, выполняемая на этапе S1406. Обратите внимание, что на Фиг. 16, процессы, которые являются теми же, что показаны на Фиг. 6, обозначаются такими же ссылочными позициями, и их описания опускаются по необходимости.
Сначала на этапе S1601 определяется, находится ли кадр в фокусе согласно проведению процесса непрерывной автофокусировки, осуществляемому на этапе S1403; если не определено, что кадр находится в фокусе, выполняется обработка автофокусировки на основе сканирования, описанная в первом варианте осуществления со ссылкой на Фиг. 6.
С другой стороны, в случае, когда при обработке непрерывной автофокусировки определено, что кадр находится в фокусе, процесс переходит к этапу S601. На этапах с S601 по S604, осуществляется обработка, описанная в первом варианте осуществления со ссылкой на Фиг. 6.
В случае, когда присутствует точечный источник света и было определено, что обработка автофокусировки нормального изображения не может быть осуществлена (ДА на этапе S604), на этапе S1610 выполняется обработка автофокусировки точечного источника света. Здесь, поскольку было определено, что кадр находится в фокусе при непрерывной автофокусировке, выполненной на этапе S1403 на Фиг. 14, и была найдена грубая позиция в фокусе, необходимо только провести сканирование в непосредственной близости от этой позиции.
Уровни экспозиции электронного видоискателя и автофокусировки на этапе S1610 определяются таким же образом, как и при обработке автофокусировки точечного источника света, описанной в первом варианте осуществления. Тем не менее, во втором варианте осуществления, сканируется заранее определенный диапазон сканирования, который является центральным по отношению к пику оценочного значения автофокусировки, найденному с помощью непрерывной автофокусировки в соответствии с заранее определенным интервалом сканирования, как описано ранее. Диапазон сканирования и интервал сканирования, определяются с учетом соотношения объекта точечного источника света, ошибки позиции в фокусе вследствие грубого интервала сканирования, и времени автофокусировки, и их значения указаны ниже.
Между тем, объект, распознанный в качестве высокочастотного объекта в случае, когда точечный источник света мал, а максимальное значение его может быть пропущено, если интервал сканирования является грубым; в силу этого, необходимо сделать интервал сканирования меньше на некоторую величину. Соответственно, интервал сканирования автофокусировки, осуществляемого на этапе S1610 устанавливается например, на глубине 2,5.
На этапе S1605, а также на этапе S1606, на котором осуществляется обработка автофокусировки нормального изображения, диапазон сканирования и интервал сканирования определяются с помощью позиции в фокусе, определенной в качестве находящейся в фокусе с помощью процесса непрерывной автофокусировки находящейся в центре. В качестве одного примера, диапазон сканирования задается на глубину ± 5 относительно грубой позиции в фокусе, и интервал сканирования устанавливается на глубину 2,5, при автофокусировке, осуществляемой на этапе S1605 и этапе S1606. Затем определенный диапазон сканирования сканируется с определенным интервалом сканирования, а позиция в фокусе находится для каждого кадра с помощью той же процедуры, что осуществляется на этапе S605 и этапе S606 на Фиг. 6, описанной в первом варианте осуществления.
Согласно второму варианту осуществления, описанному до сих пор, количество времени, необходимое для достижения состояния в фокусе после включения переключателя SW1 может быть сокращено, и в результате, и количество времени до захвата изображения может быть сокращено в дополнение к эффектам, описанным в первом варианте осуществления
ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ.
Далее будет описан третий вариант осуществления настоящего изобретения. Настоящий третий вариант осуществления отличается от первого варианта осуществления тем, что период накопления заряда, при котором пиксели не будет насыщенными находится до включения переключателя SW1 (перед командой к подготовке захвата изображения), и полоса пропускания полосового фильтра, используемая при обработке автофокусировки нормального изображения, переключается на основании наличия/отсутствия насыщенных пикселей в заключительном периоде накопления заряда. Следует отметить, что конфигурация устройства 1 захвата изображения является такой же, как показано на Фиг. 1 и 2, и, таким образом, его описание будет опущено.
В настоящем третьем варианте осуществления, схема 14 автофокусировки на основе сканирования обнаруживает количество насыщенных пикселей в области автофокусировки и выводит это число, в дополнение к оценочному значению автофокусировки.
ОБРАБОТКА ЗАХВАТА ИЗОБРАЖЕНИЯ
Обработка захвата изображения в соответствии с третьим вариантом осуществления будет описана с помощью блок-схемы, показанной на Фиг. 17. Последовательность обработки захвата изображения, описанная далее выполняется, когда главный выключатель питания устройства 1 захвата изображения включен, и режим работы устройства 1 захвата изображения является режимом захвата изображения (записи).
Сначала на этапе S1701, ЦПУ 15 начинает отображение в электронном видоискателе, отображая на дисплее 10 изображение, которое проходит сквозь цилиндрический корпус 31 линзы и формируется на датчике 5 изображения. Затем, на этапе S1702, схема 14 автофокусировки на основе сканирования определяет присутствие или отсутствие в кадре автофокусировки насыщенного пикселя, который имеет максимальное значение уровня яркости. Процесс переходит к этапу S1703 в случае, когда количество насыщенных пикселей больше или равно заранее определенному числу, и переходит к этапу S1705 в случае, когда количество насыщенных пикселей меньше заранее определенного числа. На этапе S1703 определяется, является ли период накопления заряда автофокусировки, заданный в данный момент, минимальным периодом накопления заряда, который может быть задан, и если этот период минимальный, процесс переходит к этапу S1705. Если период не является минимальным периодом накопления заряда, то процесс переходит к этапу S1704, где период накопления заряда автофокусировки сокращается на заранее определенную величину, и процесс переходит к этапу S1705.
На этапе S1705 ЦПУ 15 проверяет состояние спускового механизма. Когда спусковой механизм задействуется пользователем и включается переключатель SW1, процесс переходит к этапу S1706, где выполняется процесс автоматической экспозиции. Затем на этапе S1707 схема 14 автофокусировки на основе сканирования подсчитывает число насыщенных пикселей.
На этапе S1708 определяется, является ли количество насыщенных пикселей, подсчитанное на этапе S1707, большим или равным заранее определенному числу; когда число больше или равно заранее определенному числу, то определяется, что был обнаружен точечный источник света, и процесс переходит к этапу S1709, в то время, тогда как если число не больше или равно заранее определенному значению, то процесс переходит к этапу S1710. На этапе S1709 для обработки автофокусировки точечного источника света задается полосовой фильтр с более высокой полосой пропускания, чем полосовой фильтр, который обычно используется, после чего процесс переходит к этапу S1711. В третьем варианте осуществления, осуществляется обработка автофокусировки с помощью сигнала изображения, который прошел через заданный полосовой фильтр. С другой стороны, в случае, когда количество подсчитанных насыщенных пикселей меньше заранее определенного числа, то определяется, что точечный источник света не присутствует; процесс переходит этапу S1710, где обычно используется полосовой фильтр, заданный для обработки автофокусировки нормального изображения, после чего процесс переходит к этапу S1711. Процесс автофокусировки нормального изображения на основе сканирования на этапе S1711 почти такой же, как процесс, описанный в первом варианте осуществления на основе Фиг. 11. Следует обратить внимание, что в случае, когда на этапе S1708 определено наличие точечного источника света, оценочное значение автофокусировки, полученное со схемы 14 автофокусировки на основе сканирования, нормализуется с использованием интегрированного значения яркостей, значения которых оказываются вблизи позиции в фокусе, так что влияние точечного источника света может быть уменьшено. Другие процессы идентичны тем, которые описаны в первом варианте осуществления, и, таким образом, будут опущены.
Следует отметить, что хотя в третьем варианте осуществления подсчитывается количество насыщенных пикселей, имеющих максимальное значение уровня яркости, конфигурация может быть такой, что подсчитывается количество пикселей высокой яркости со значениями яркости, большими или равными заранее определенному значению.
ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет описан четвертый вариант осуществления настоящего изобретения. В четвертом варианте осуществления производится процесс определения того произошло ли мерцание, а также сброса экспозиции автофокусировки, если необходимо, с учетом частоты мерцания, в случае, если происходит мерцание, в дополнение к процессу, описанному в первом варианте осуществления. Соответственно, будет описан только процесс сброса экспозиции автофокусировки, участвующий в процессе осуществления автоматической экспозиции, а описание других процессов будут опущено
Фиг. 18 представляет собой блок-схему, иллюстрирующую общую конфигурацию устройства 1ʹ захвата изображения в соответствии с четвертым вариантом осуществления. Конфигурация, показанная на Фиг. 18 дополняет конфигурацию, показанную на Фиг. 1, схемой 37 обнаружения мерцания, которая принимает выходной сигнал со схемы 7 аналого-цифрового преобразования, и обнаруживает, происходит или нет мерцание на базе флуктуаций яркости на экране, и определяет частоту обнаруженного мерцания. Остальные элементы являются такими же, как и в конфигурации, показанной на Фиг. 1, и, таким образом, ей будут присвоены одни и те же ссылочные позиции, и их описание будет опущено.
ОБРАБОТКА АВТОМАТИЧЕСКОЙ ЭКСПОЗИЦИИ.
Фиг. 19 представляет собой блок-схему последовательности операций, иллюстрирующую операции при обработке автоматической экспозиции, осуществляемой на этапе S3 на Фиг. 5 в соответствии с четвертым вариантом осуществления. В четвертом варианте осуществления также заданы различные условия экспозиции и различные скорости считывания в датчике 5 изображения для получения сигнала электронного видоискателя и для получения сигнала для обработки автофокусировки. Между тем, в случае, когда мерцание строк оказывает влияние на сигнал автофокусировки, недоэкспонированный диапазон определяется для каждой строки в кадре автофокусировки, и экспозиции задается повторно с учетом недоэкспонированного диапазона.
На этапе S1901, схема 37 обнаружения мерцания обнаруживает мерцание, после чего процесс переходит к этапу S1902. Здесь процесс обнаружения мерцания может определить, действительно ли было обнаружено мерцание или нет, и выполнить обнаружение частоты мерцания, при помощи любого обычно используемого способа; причем выполнение этого процесса не является первоначальной целью настоящей заявки, и таким образом детали его будут здесь опущены.
На этапе S1902 определяется, было ли обнаружено мерцание на этапе S1901 или нет, и в случае обнаружения мерцания процесс переходит к этапу S1903 в случае, когда мерцание было обнаружено, и переходит к этапу S1910 в случае, когда не было обнаружено мерцания. На этапе S1903, задается заранее определенное значение скорости считывания сигнала электронного видоискателя, после чего процесс переходит к этапу S1904.
На этапе S1904, задается экспозиция для сигнала в электронном видоискателе с учетом экспозиции экрана в целом, так что получается надлежащая экспозиция. В это время, предпочтительно задан период накопления заряда способный подавлять мерцание с учетом частоты мерцания. Здесь, в случае, когда было обнаружено мерцание с частотой 50 Гц при обнаружении мерцания, выполненном на этапе S1901, экспозиция задается таким образом, что является целым кратным частоты мерцания, или, другими словами, преимущественно задается равной 1/50 секунды или 1/100 секунды. С другой стороны, в случае, когда было обнаружено мерцание на частоте 60 Гц при обнаружении мерцания, выполненном на этапе S1901, экспозиция задается таким образом, что является целым кратным частоты мерцания, или, другими словами, преимущественно задается 1/60 секунды или 1/120 секунды. Это позволяет подавить появление ухудшения в связи с мерцанием строк на дисплее электронного видоискателя, даже в том случае, когда было обнаружено такое мерцание.
На этапе S1905, задается скорость считывания для сигнала автофокусировки с учетом частоты мерцания, обнаруженного при обнаружении мерцания, выполняемого на этапе S1901. Здесь, в случае, когда было обнаружено мерцание на частоте 50 Гц при обнаружении мерцания, выполненном на этапе S1901, скорость считывания задается в 1/50 секунды или 1/100 секунды. С другой стороны, в случае, когда было обнаружено мерцание на частоте 60 Гц при обнаружении мерцания, выполненном на этапе S1901, скорость считывания задается в 1/60 секунды или 1/120 секунды. Путем согласования скорости считывания с частотой мерцания, циклические колебания яркости, которые соответствуют влиянию мерцания на каждой строке считывания, становятся постоянными при каждом считывании, что позволяет предотвратить мерцание строк.
На этапе S1906, задается экспозиция автофокусировки с учетом экспозиции на всего диапазона задания кадра автофокусировки. Здесь, в отличие от параметров задания экспозиции для отображения на ЖК дисплее 10, внешний вид не представляет интереса и, таким образом, экспозиция задается с приоритетом, отданным открытой диафрагме и низкому коэффициенту усиления, что соответствует оптимальным параметрам задания экспозиции для поддержания точности автофокусировки. Соответственно, в зависимости от величины скорости затвора, может оставаться влияние мерцания строк.
На этапе S1907, определяется, оказывает ли влияние на сигнал автофокусировки мерцание строк; причем в случае, когда сигнал подвергся влиянию мерцания строк, процесс переходит к этапу S1908, тогда как в случае, когда сигнал не был подвергнут влиянию мерцания строк, процесс заканчивается. Здесь, осуществляется определение с помощью сравнения частоты мерцания, обнаруженного на этапе S1901 со значением скорости затвора, заданной на этапе S1906. В случае, когда частота мерцания и период накопления заряда не являются синхронными, например, экспозиция будет отличаться от строки к строке, влияние мерцания строк останется. Однако, поскольку скорость считывания, синхронная с выявленным мерцанием, была задана на этапе S1905, вид, в котором мерцание строк появляется в каждой строке постоянен при каждом считывании, и, таким образом, не возникает флуктуации мерцания строк.
На этапе S1908, определяются недоэкспонированный из-за влияния мерцания строки сигнала автофокусировки. Фиг. 20 представляет собой схему, иллюстрирующую выявление недостаточной экспозиции. На Фиг. 20 экран 18а указывает изображение сигнала автофокусировки, в котором задаются 25 кадров автофокусировки (кадры автофокусировки с 18а по 18y). Здесь задается диапазон, в котором в уровне выходного сигнала наблюдается перепад на значение, большее или равное заранее определенному числу из-за цикла флуктуаций мерцания, обнаруженного на этапе S1901 в качестве недоэкспонированного диапазона, причем цикл флуктуации мерцания и синхронизация сигнала считывания автофокусировки связаны, и указана зона сигнала автофокусировки в недоэкспонированном диапазоне. В примере, показанном на Фиг. 20, десять кадров автофокусировки, а именно кадры автофокусировки с 18а по 18e и кадры автофокусировки с 18u по 18y, находятся в недоэкспонированном диапазоне.
На этапе S1909, экспозиция автофокусировки задается повторно с учетом кадров автофокусировки, содержащих строки, относительно которых определено, что они являются недоэкспонированными на этапе S1908, с помощью выполнения процесса, который будет описан ниже. Отметим, что процесс, выполняемый здесь, будет описан ниже со ссылкой на Фиг. 21.
Между тем, в случае, когда не было обнаружено мерцания, на этапе S1910 задается заранее определенна скорость считывания для получения сигнала электронного видоискателя, и процесс переходит к этапу S1911. На этапе S1911, задается экспозиция электронного видоискателя с учетом экспозиции экрана в целом, после чего процесс переходит к этапу S1912.
На этапе S1912, задается заранее определенная скорость считывания для получения сигнала автофокусировки, и процесс переходит к этапу S1913. На этапе S1913, задается экспозиция с учетом экспозиции в общем диапазоне, в котором установлены кадры автофокусировки, причем приоритет отдается открытой диафрагме/низкому коэффициенту усиления для обеспечения точности автофокусировки таким же образом, как и на этапе S1906, после чего процесс заканчивается.
Следует отметить, что может случиться ситуация, когда скорость считывания, соответствующая мерцанию не может быть задана на этапе S1905 (случай, когда скорость считывания должна быть увеличена, чтобы отдать приоритет скорости, случай, когда скорость считывания должна быть снижена для того, чтобы увеличить срок накопления заряда в условиях низкой освещенности кадра и т.п.). В таком случае, перепад выходного сигнала, вызванный мерцанием может, быть исправлен путем изменения периода накопления заряда, уровня усиления сигнала и т.п. на построчной основе в соответствии с частотой обнаруженного мерцания.
Фиг. 21 представляет собой блок-схему, иллюстрирующую процесс сброса экспозиции, осуществляемый на этапе S1909 на Фиг. 19. Здесь установлен диапазон выдержки, способный обеспечить результативность автофокусировки при обработке автофокусировки в диапазоне, не превышающем числа шагов Thr_Over относительно необходимой экспозиции, и не меньше, чем число шагов Thr_Under относительно необходимой экспозиции. К примеру, значение Thr_Over может быть установлено равным +1, а Thr_Under может быть установлено равным -1.
На этапе S2101, получаются значения яркости для каждого набора кадров автофокусировки, и рассчитывается разница между экспозицией в каждом кадре автофокусировки и надлежащей экспозицией, и процесс переходит к этапу S2102. На этапе S2102, определяется присутствие кадров автофокусировки в недоэкспонированном диапазоне на основе результата определения недостаточной экспозиции, выполненного на этапе S1908, присутствие кадра автофокусировки, недоэкспонированного больше числа шагов Thr_Under, но меньше надлежащей экспозиции; причем в случае присутствия такого кадра процесс переходит к этапу S2103, в то время как в случае, когда такого кадра нет, процесс переходит к этапу S2107.
На этапе S2103 определяется, является ли или нет кадр автофокусировки недоэкспонированным более, чем на Thr_Under, приоритетным кадром автофокусировки; в случае, когда кадр автофокусировки является приоритетным кадром автофокусировки, процесс переходит к этапу S2104, тогда как в случае, когда кадр автофокусировки не является приоритетным кадром автофокусировки, процесс переходит к этапу S2105. Здесь, "приоритетным кадром автофокусировки" является, например, кадр автофокусировки, который находится недалеко от центра и т.п. и, вероятно, будет содержать объект, при этом выходной результат оценочного значения автофокусировки кадра автофокусировки с высоким приоритетом задается заранее, чтобы преимущественно использоваться при определении позиции в фокусе.
На этапе S2104, задается число шагов для коррекции экспозиции с использованием в качестве референтных самых недоэкспонированных кадров автофокусировки среди высоко-приоритетных кадров автофокусировки. Количество шагов для исправления задается любым, при котором наиболее недоэкспонированный кадр автофокусировки принимает экспозицию в диапазоне от необходимой экспозиции + значение Thr_Over до необходимой экспозиции + значение Thr_Under, что является диапазоном, что обеспечивает выполнение автофокусировки.
На этапе S2105 задается число шагов для коррекции экспозиции с использованием самого недоэкспонированного кадра автофокусировки среди кадров автофокусировки в недоэкспонированном диапазоне в качестве референтного, после чего процесс переходит к этапу S2106. На этапе S2106 определяется наличие или отсутствие среди высокоприоритетных кадров автофокусировки кадра автофокусировки, переэкспонированного более значения Thr_Over в результате коррекции экспозиции по количеству шагов коррекции; при этом в случае присутствия такого кадра автофокусировки, процесс переходит к этапу S2107, в то время как в случае, когда такой кадр автофокусировки не присутствует, процесс переходит к этапу S2108.
На этапе S2107 экспозиция не задается повторно, а на этапе S2108, экспозиция корректируется на число шагов коррекции, заданное на этапе S2104 или на этапе S2105, после чего процесс завершается.
В соответствии с четвертым вариантом осуществления, как описано до настоящего момента, при обнаружении мерцания, выполняется процесс, который устанавливает приоритет зрительного восприятия для сигнала отображения электронного видоискателя, в то время как параметры экспозиции приводятся в исполнение для того, чтобы обеспечить точность автофокусировки для сигнала автофокусировки. Благодаря этому, может быть гарантировано как изображение в электронном видоискателе, так и точность автофокусировки при обнаружении мерцания.
ПЯТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет описан пятый вариант осуществления настоящего изобретения. Устройство захвата изображения в соответствии с пятым вариантом осуществления имеет такую же конфигурацию, как и устройство 1ʹ захвата изображения, описанное в четвертом варианте осуществления со ссылкой на Фиг. 18. Обработка, выполняемая в соответствии с пятым вариантом осуществления, отличается от вышеупомянутого четвертого варианта осуществления тем, что производится процесс обнаружения присутствия мерцания и, в случае, когда происходит мерцание, процесс задания кадров автофокусировки осуществляется с учетом частоты мерцания. Соответственно, будет описан только процесс задания кадров автофокусировки, участвующих в обработке автоматической экспозиции, а описание других процессов будет опущено.
Фиг. 22 представляет собой блок-схему, иллюстрирующую последовательность операций при обработке автоматической экспозиции, выполненных на этапе S3 на Фиг. 5 в соответствии с пятым вариантом осуществления. Этот процесс отличается от процесса, показанного на Фиг. 19 тем, что не производится повторного задания обработки автофокусировки этапа S1909. Другие процессы являются такими же, как и в способах, описанных со ссылкой на Фиг. 19 и, следовательно, их описание будет опущено.
Фиг. 23 представляет собой блок-схему, иллюстрирующую обработку автофокусировки нормального изображения, выполняемую на этапе S605 или на этапе S606 на Фиг. 6. Здесь кадры автофокусировки установлены в диапазоне, в котором может быть обеспечена точность автофокусировки на основе результата определения недостаточной экспозиции, выполняемого на этапе S1908 на Фиг. 22.
На этапе S2301, получены недоэкспонированные зоны со ссылкой на результат определения недостаточной экспозиции, выполненного на этапе S1908 на Фиг. 22. На этапе S2302, задаются кадры автофокусировки, как показано на Фиг. 24, таким образом, чтобы избежать недоэкспонированных диапазонов, полученных на этапе S2301. На Фиг. 24, экран 22а разделен на пять зон, а именно, на зоны с 22а по 22е, в соответствии со степенью недоэкспонирования. Зоны 22b и 22d находятся в недоэкспонированном диапазоне и поэтому могут быть не в состоянии обеспечить точность автофокусировки, и фактически, кадры автофокусировки в них не задаются; при этом кадры автофокусировки задаются в зоне 22с, расположенной в центре экрана и являющейся одной из областей 22а, 22с, и 22е, которые принадлежат диапазонам, не являющимся недоэкспонированными. Это позволяет получить оценочное значение автофокусировки в диапазоне, который не находится под влиянием перепада экспозиции, вызванного мерцанием строк.
На этапе S2303, автофокусировка на основе сканирования осуществляется с помощью приведения в действие узла 3 фокусной линзы в пределах заранее определенного диапазона сканирования, при этом позиция в фокусе получается для каждого кадра автофокусировки, заданного на этапе S2302, и обработка автофокусировки нормального изображения заканчивается.
Таким образом, как описано до сих пор, при обнаружении мерцания, проводится процесс, задающий приоритет внешнего вида для сигнала электронного видоискателя, и кадры автофокусировки задаются в пределах диапазона, в котором точность автофокусировки можно обеспечить для сигнала автофокусировки; в результате, внешний вид электронного видоискателя и точность автофокусировки могут быть обеспечены даже при обнаружении мерцания.
ШЕСТОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Далее будет описан шестой вариант осуществления настоящего изобретения. Устройство захвата изображения в соответствии с шестым вариантом осуществления имеет такую же конфигурацию, как и устройство 1ʹ захвата изображения, описанное в четвертом варианте осуществления со ссылкой на Фиг. 18. Процесс обработки, выполняемый в соответствии с шестым вариантом осуществления, отличается от вышеупомянутого пятого варианта осуществления тем, что производится процесс обнаружения присутствия или отсутствия мерцания, и в случае, когда происходит мерцание, выполняется процесс задания достоверности кадров автофокусировки с учетом частоты мерцания. Соответственно, ниже будет описан только процесс задания достоверности кадров автофокусировки, участвующих в обработке автоматической экспозиции, а описание других процессов будет опущено.
В шестом варианте осуществления, задается множество кадров автофокусировки, включая кадры автофокусировки, присутствующие в недоэкспонированных диапазонах на экране 23а, показанном на Фиг. 25, и достоверность кадров автофокусировки задается в соответствии со степенью, в которой содержится недоэкспонированный диапазон, на этапе S2302 на Фиг. 23. На Фиг. 23, достоверность кадра автофокусировки, не присутствующего в недоэкспонированном диапазоне, задается равной 1, достоверность кадра автофокусировки, частично присутствующего в недоэкспонированном диапазон, задается равной 2, и достоверность кадра автофокусировки, полностью присутствующего в недоэкспонированном диапазоне, задается равной 3. Тогда, при определении позиции приведения в действие линзы на этапе S608 на Фиг. 6, кадры автофокусировки, используемые при определении позиции приведения в действие выбираются в порядке приоритетности по достоверности от 1, до 2, и до 3.
Таким образом, как описано ранее, может осуществляться процесс установления приоритета внешнего вида для сигнала отображения электронного видоискателя, в то время как для сигнала автофокусировки, могут быть применены оптимальные для автофокусировки параметры экспозиции, а также может быть определена позиция в фокусе в таком диапазоне, который подавляет влияние мерцания строк в максимально возможной степени.
Хотя вышеупомянутые варианты осуществления с первого по шестой описаны на примере цифрового фотоаппарата с интегрированной линзой, настоящее изобретение также может быть применено в процессе автофокусировки цифровых видеокамер, в процессе визирования для зеркального фотоаппарата с цифровым сигналом, или тому подобного.
Хотя настоящее изобретение было описано со ссылкой на примерные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самому широкому пониманию с тем, чтобы охватить все подобные модификации и эквивалентные структуры и функции.
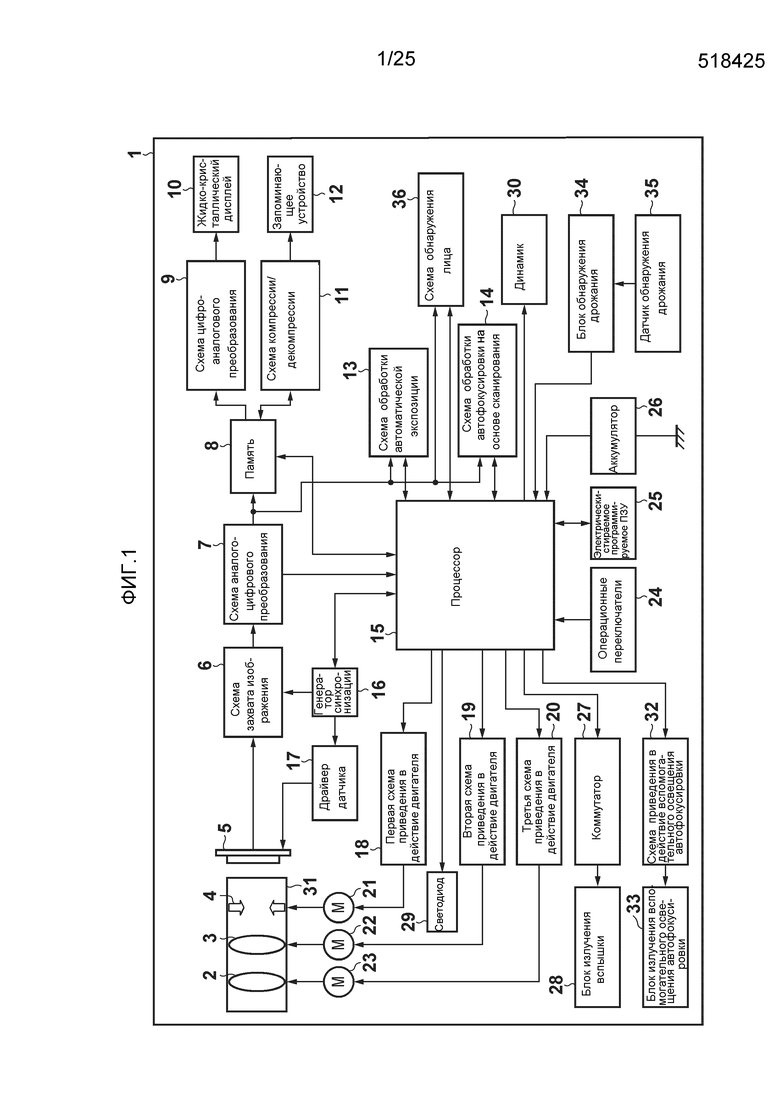
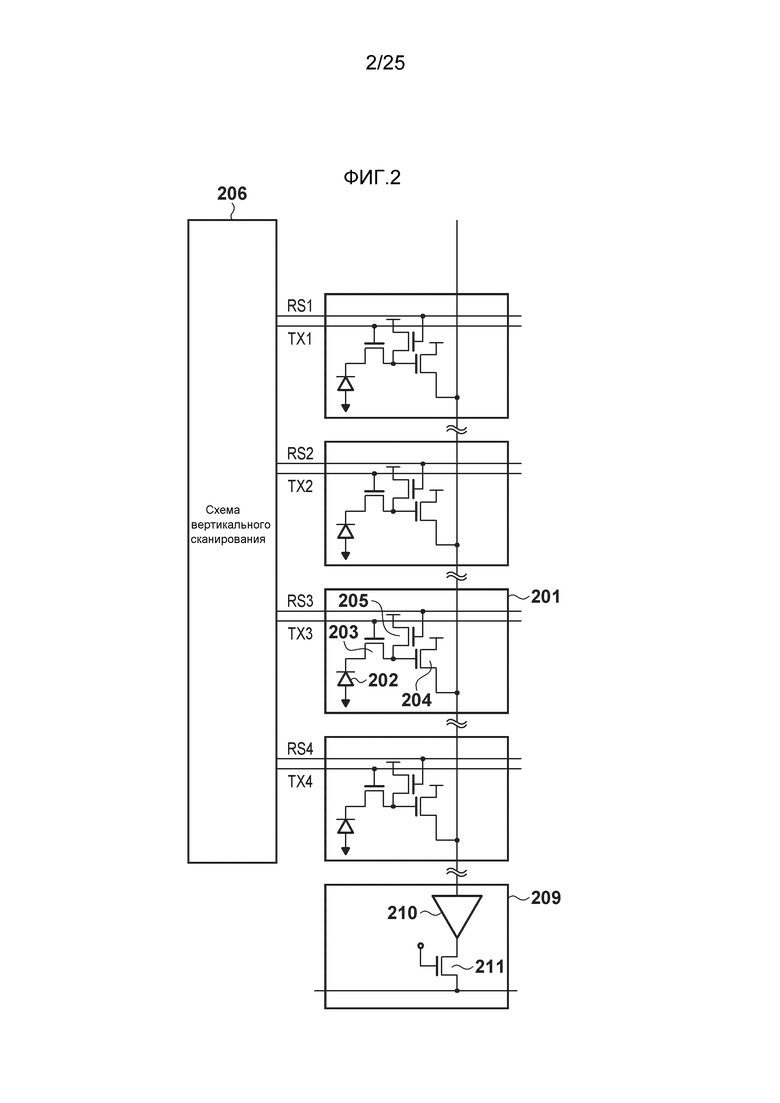
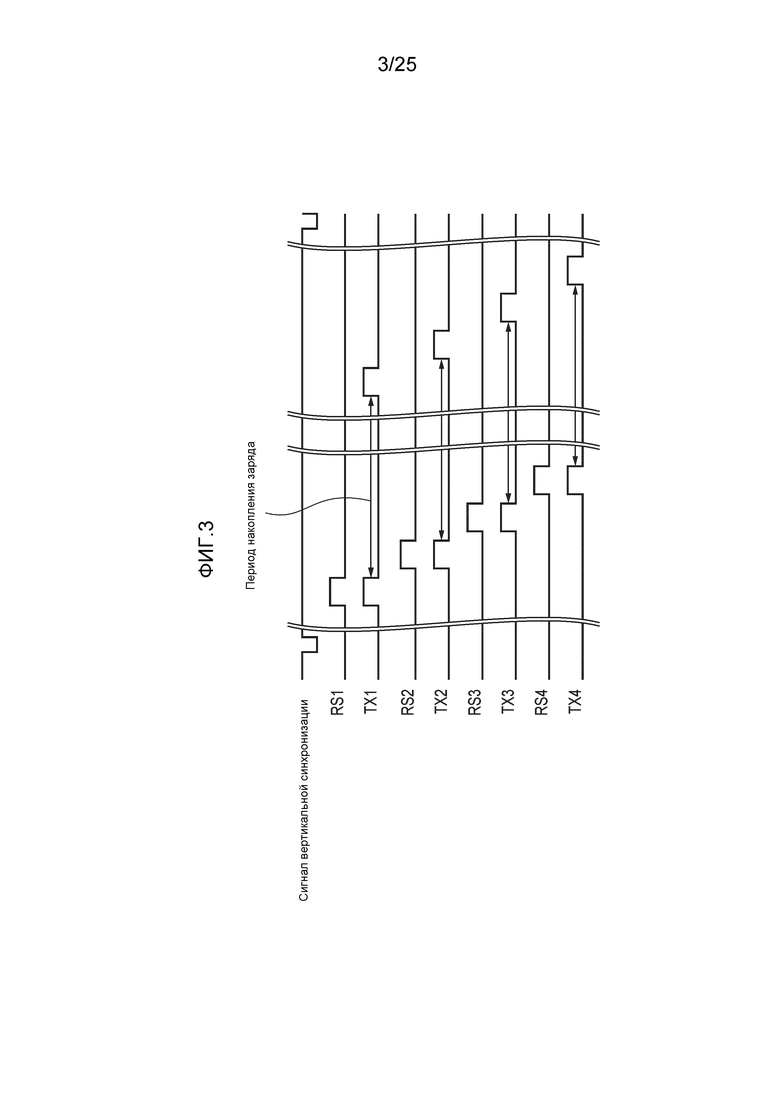
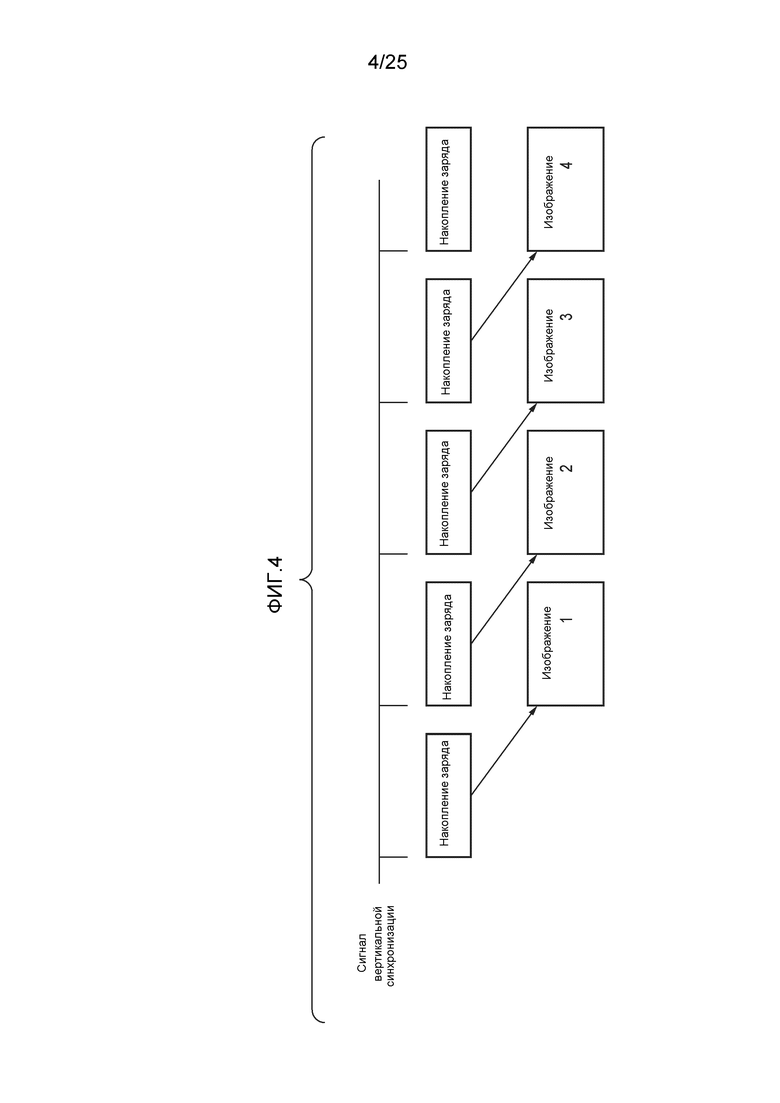
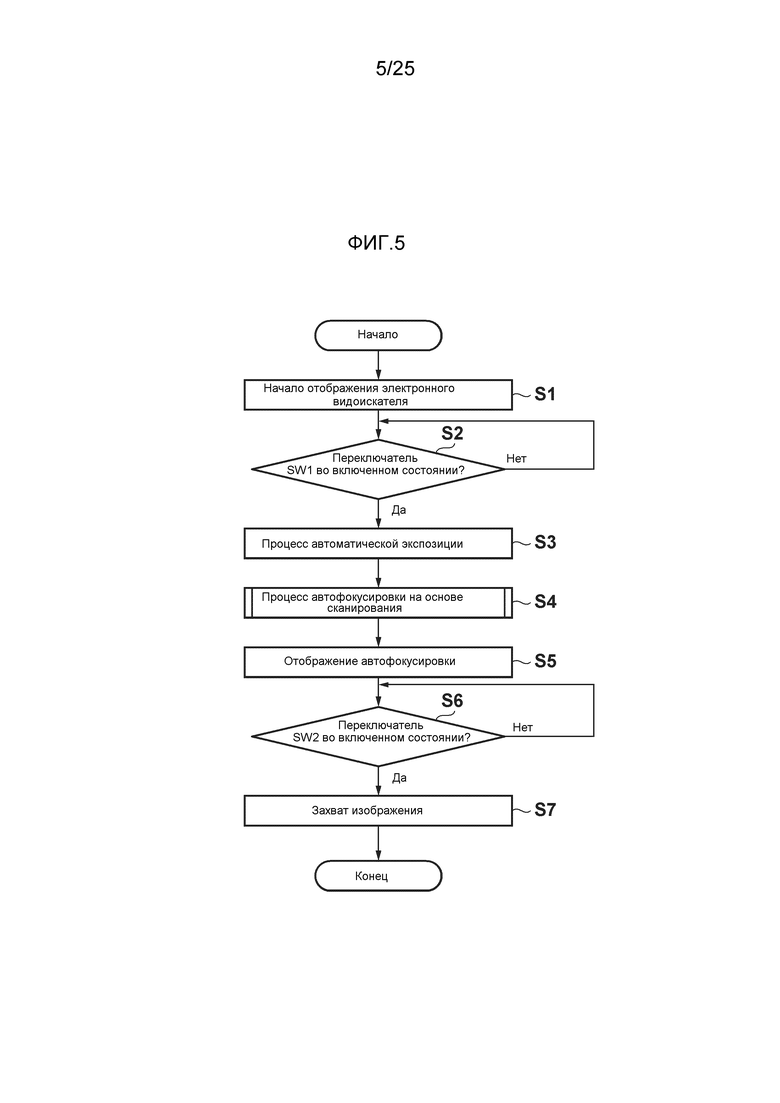
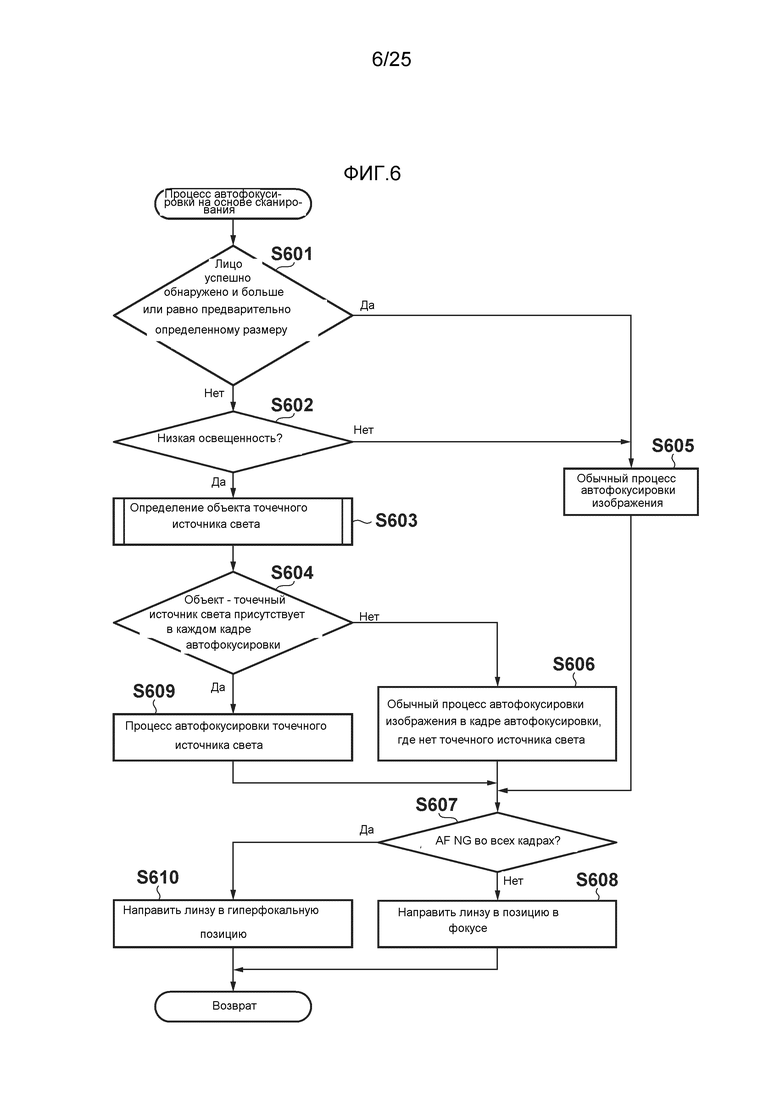
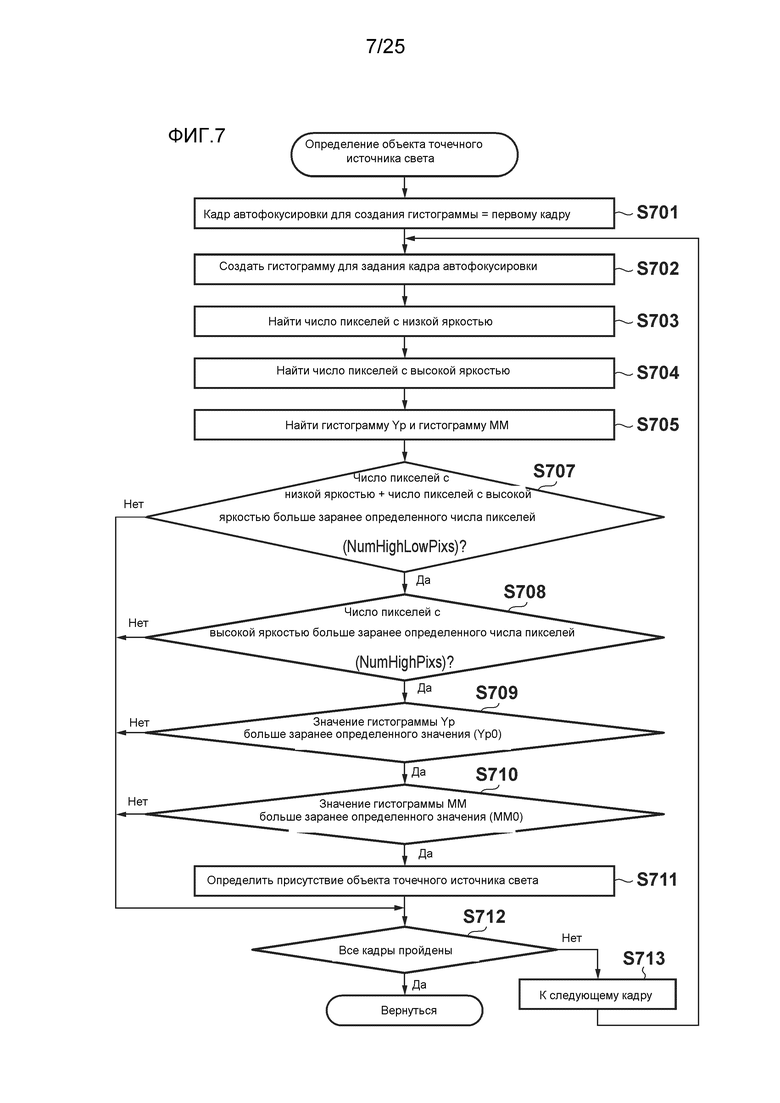
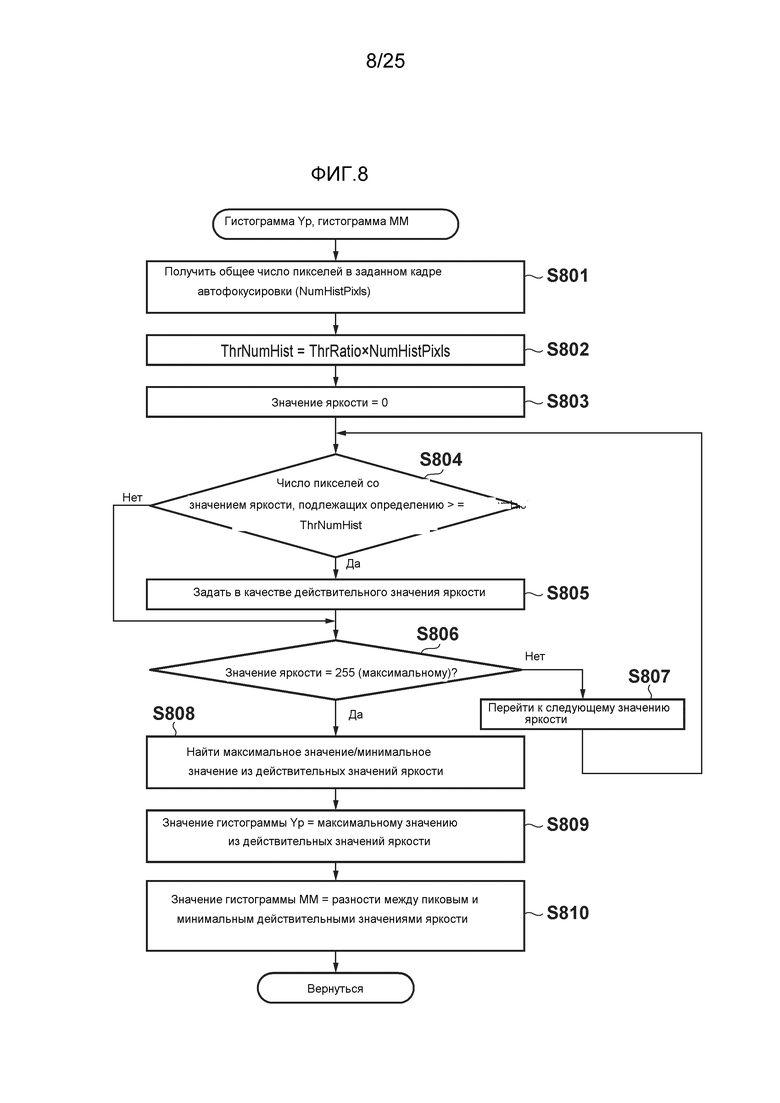
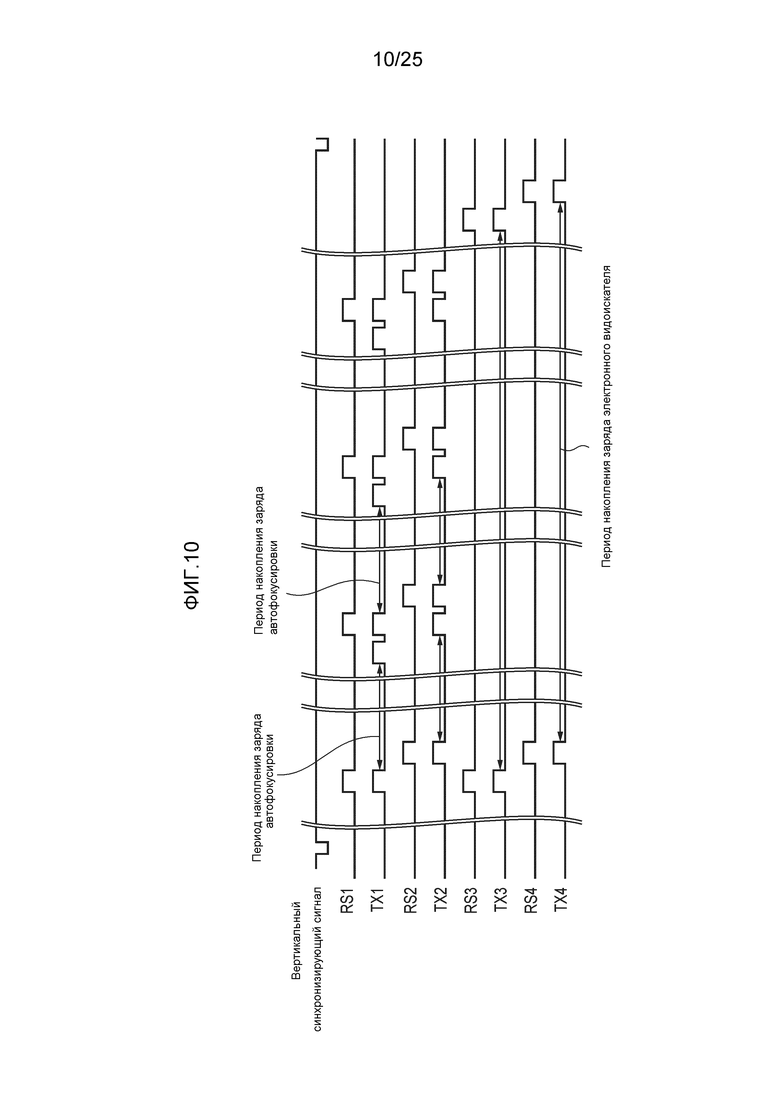
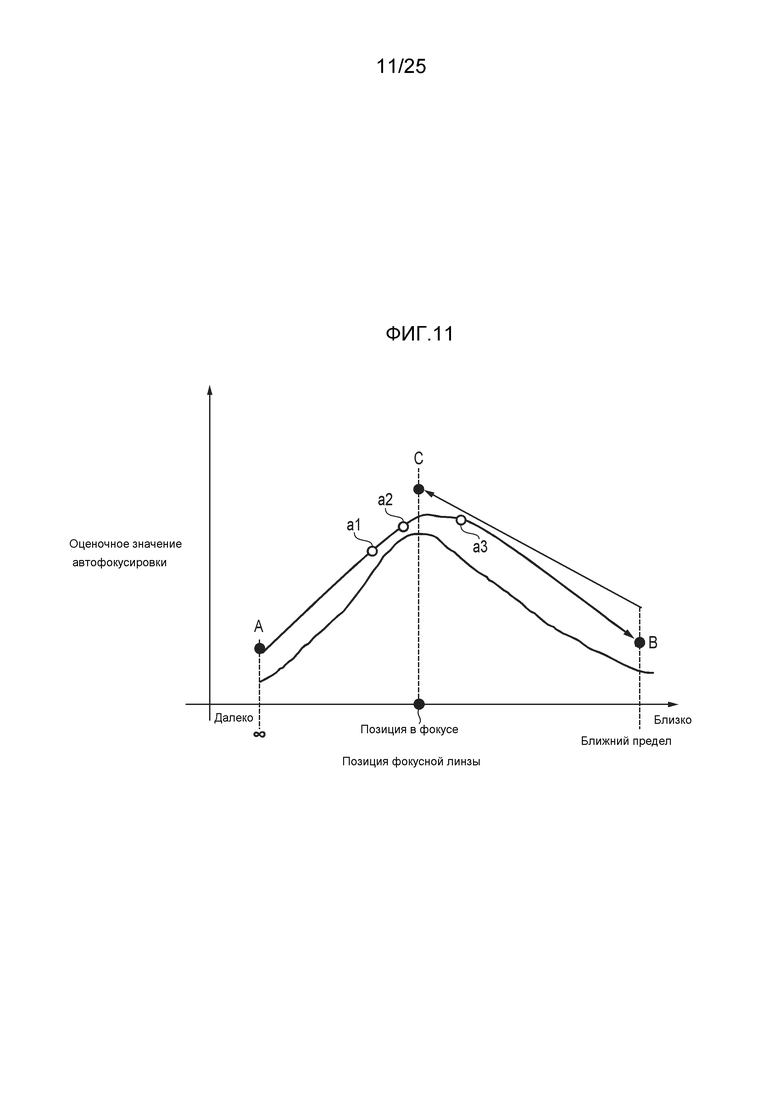

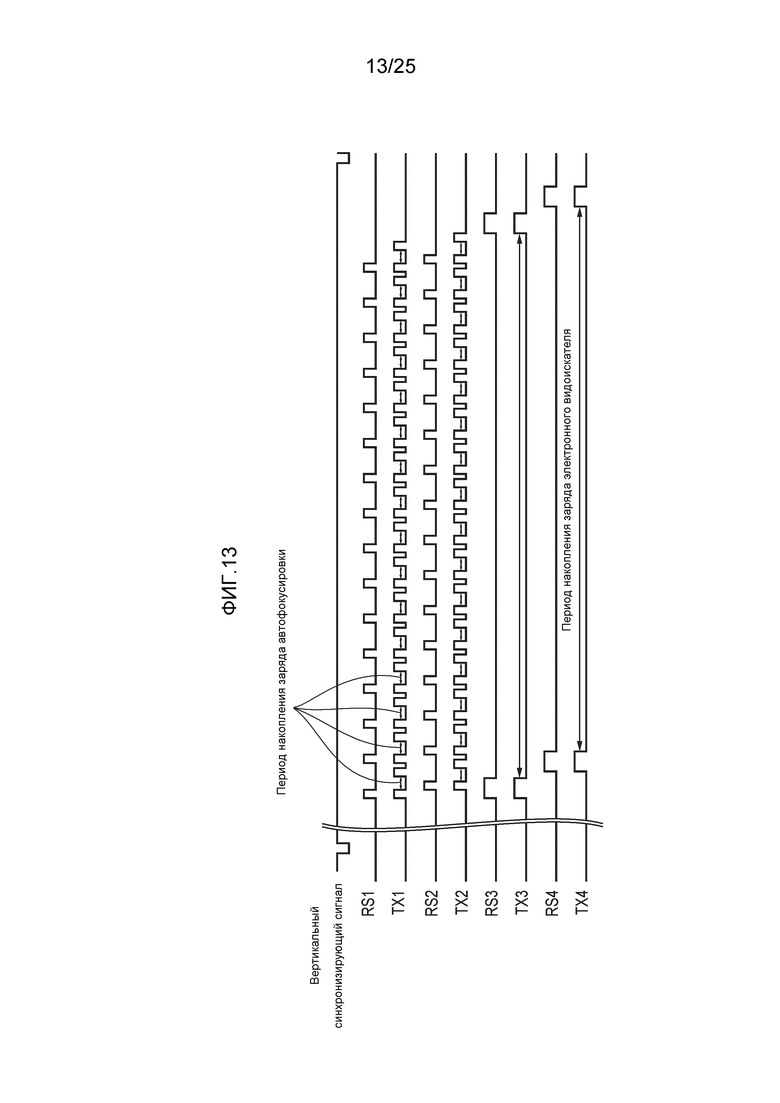
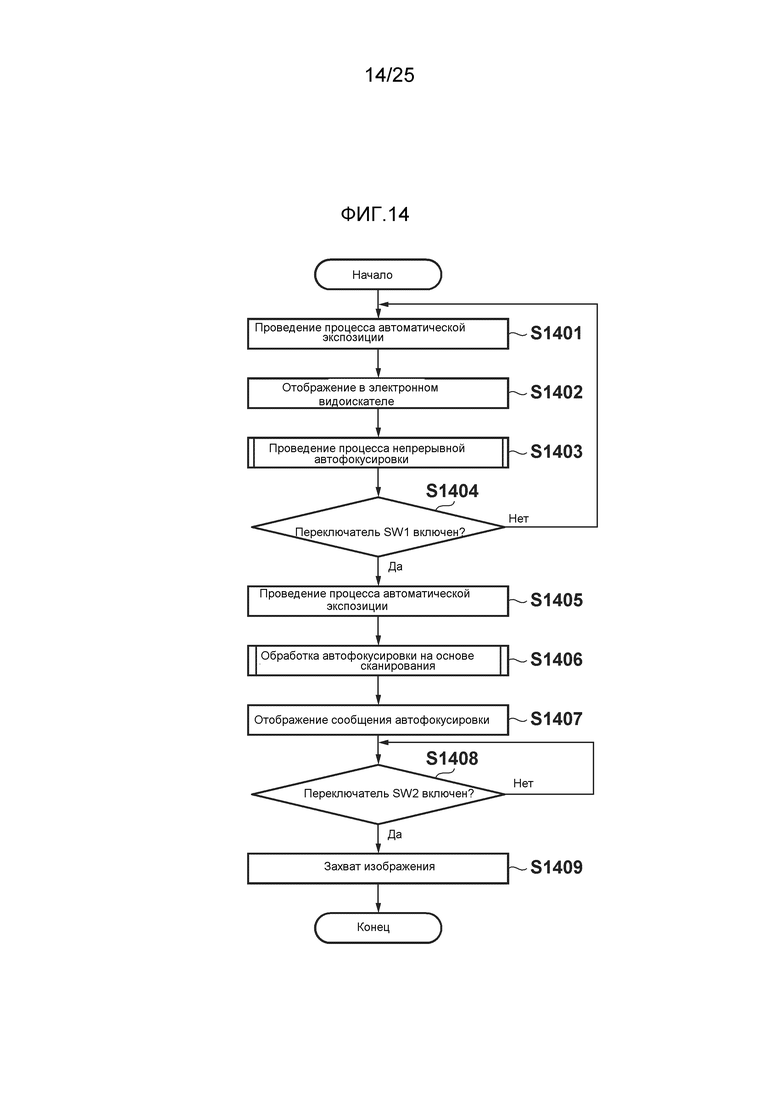
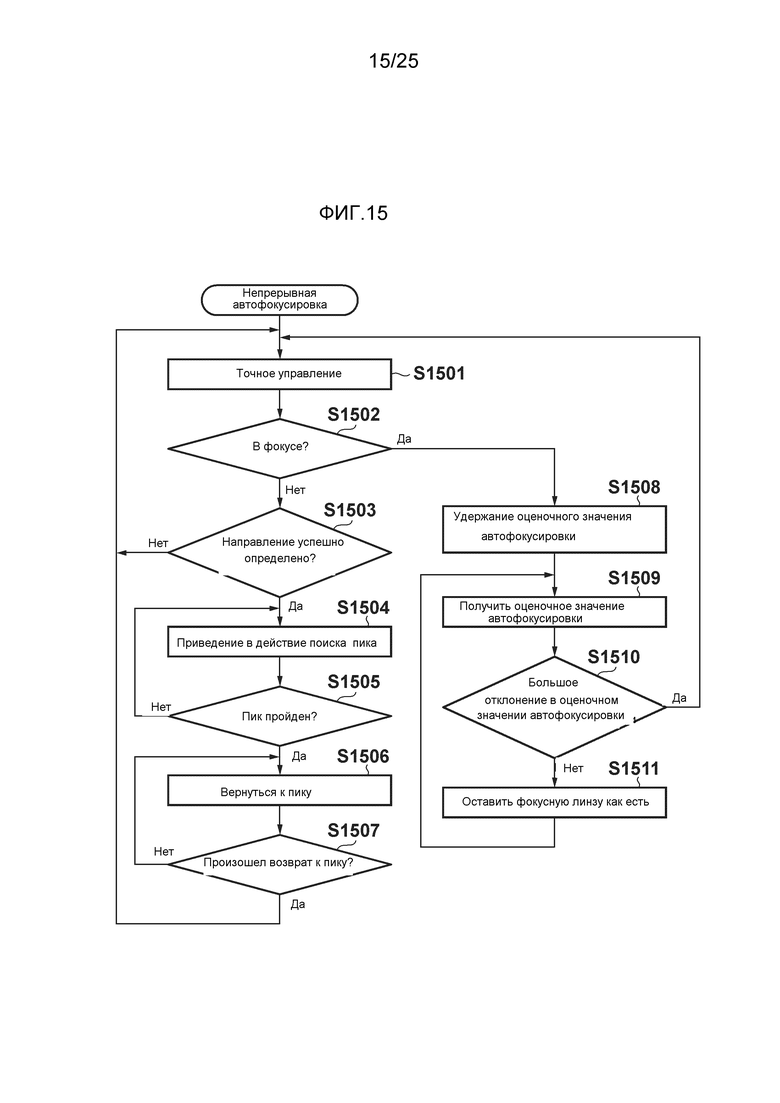
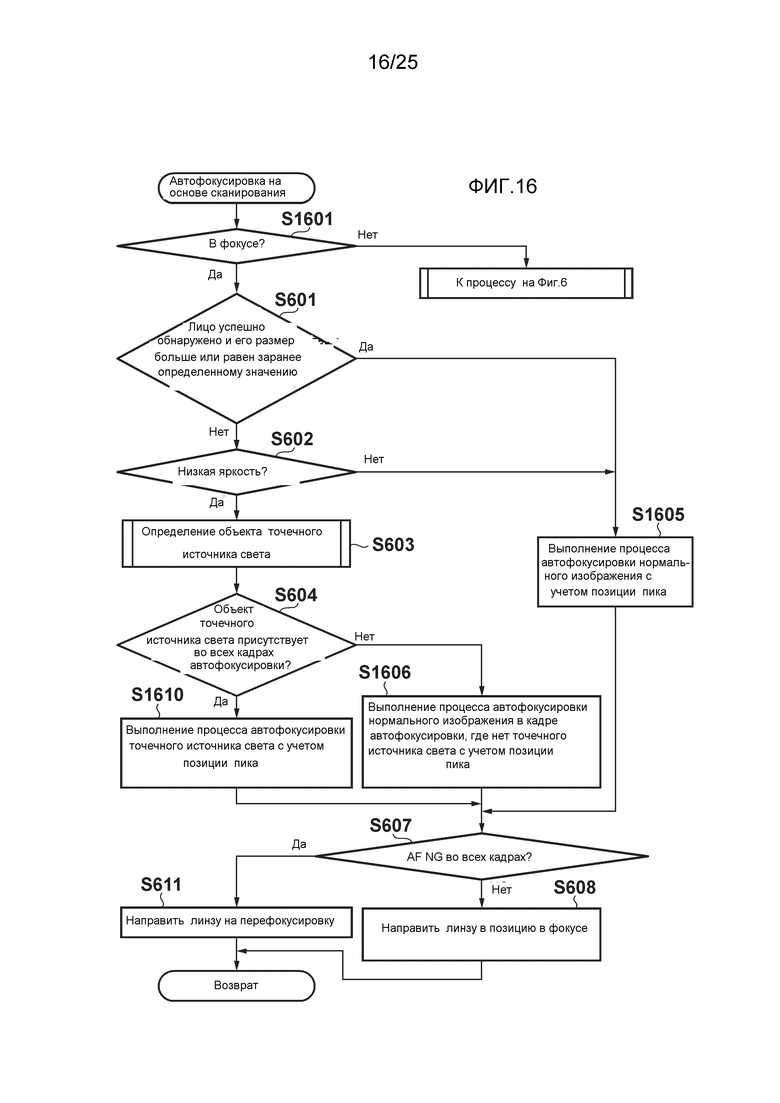
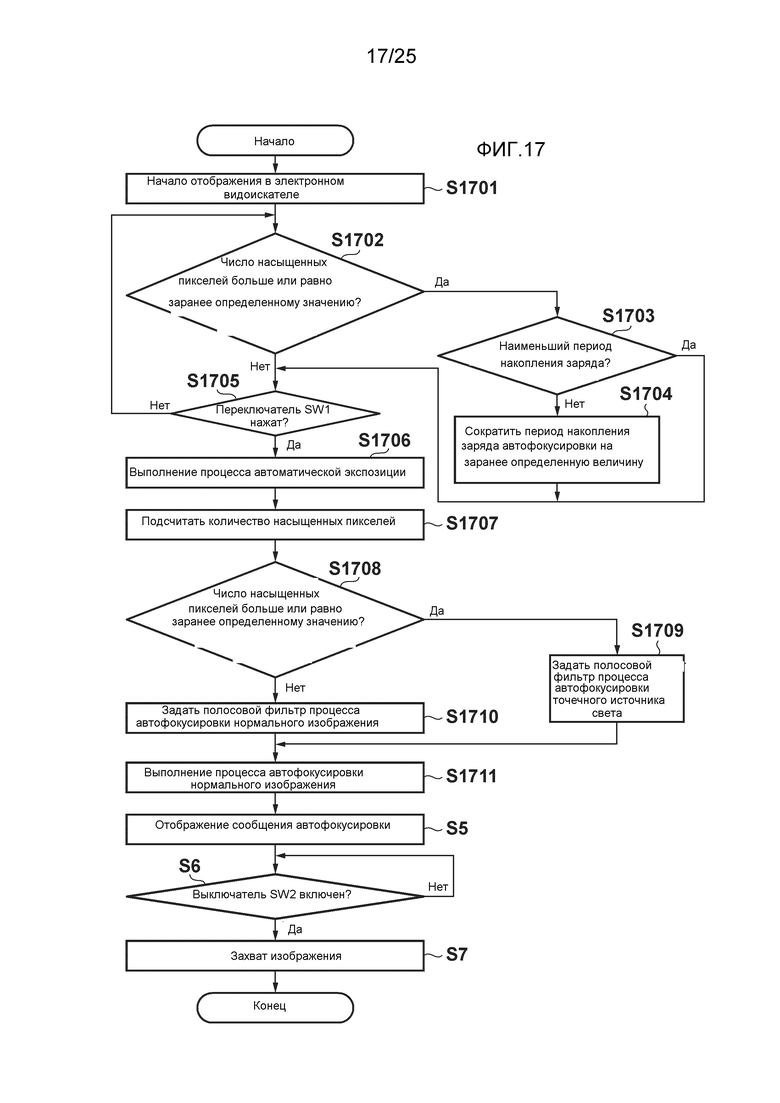
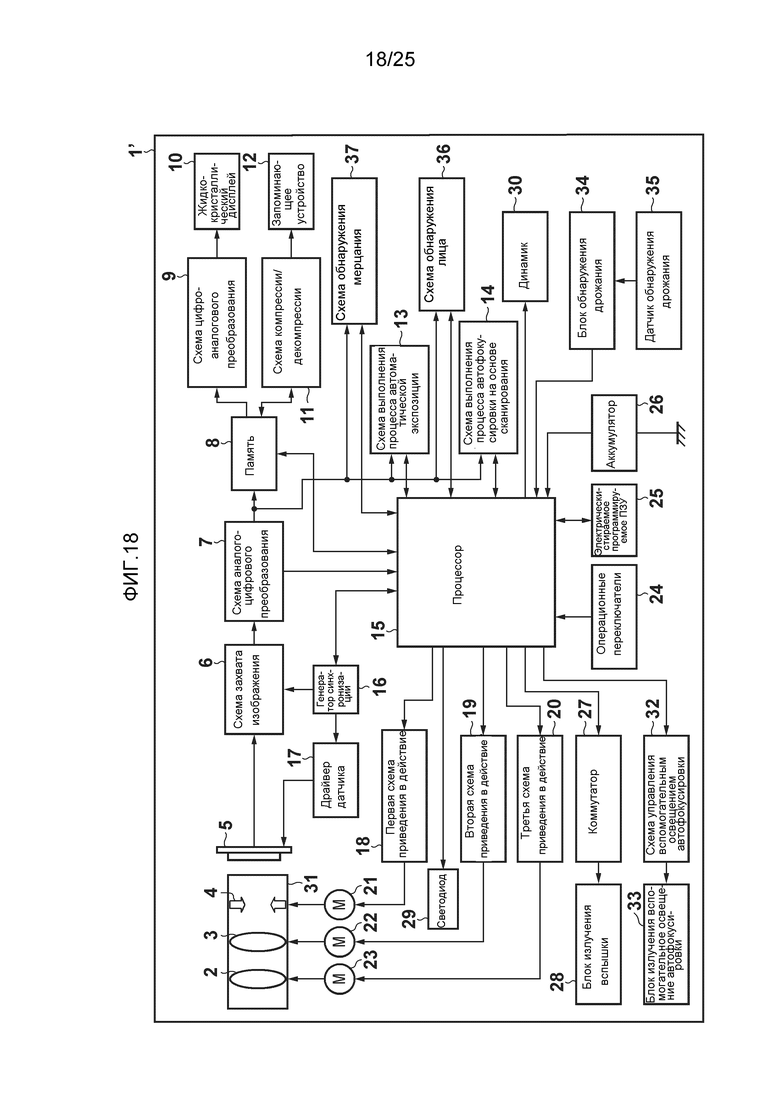
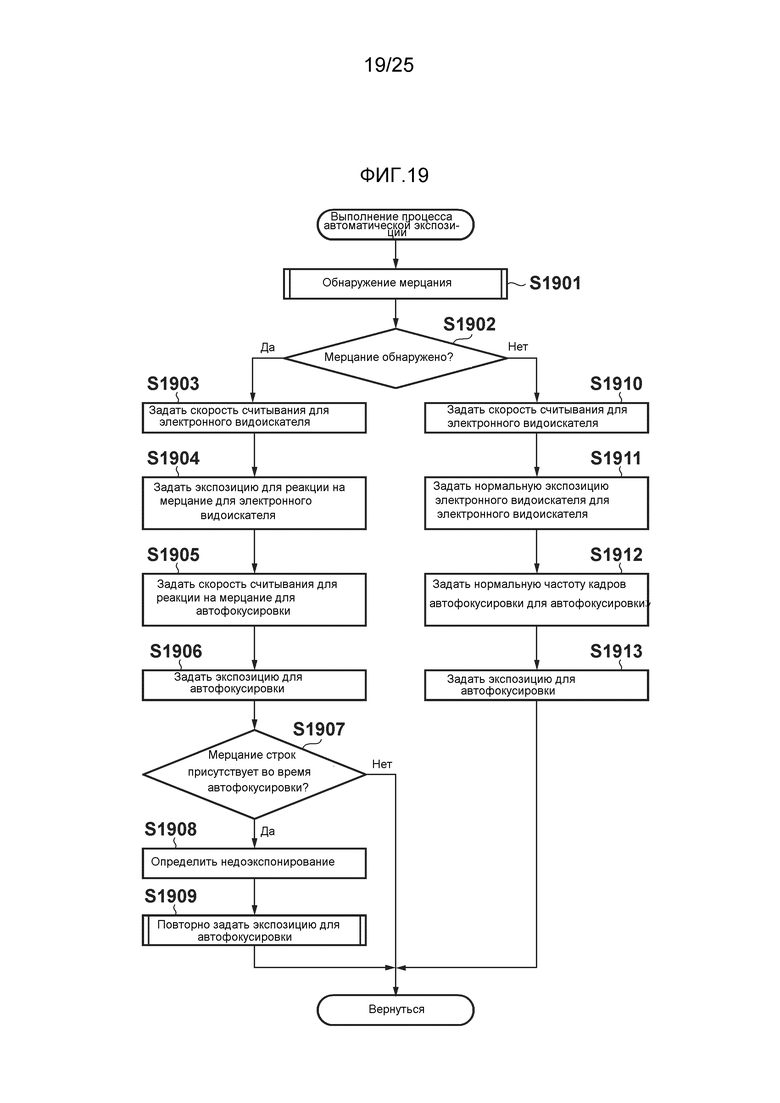
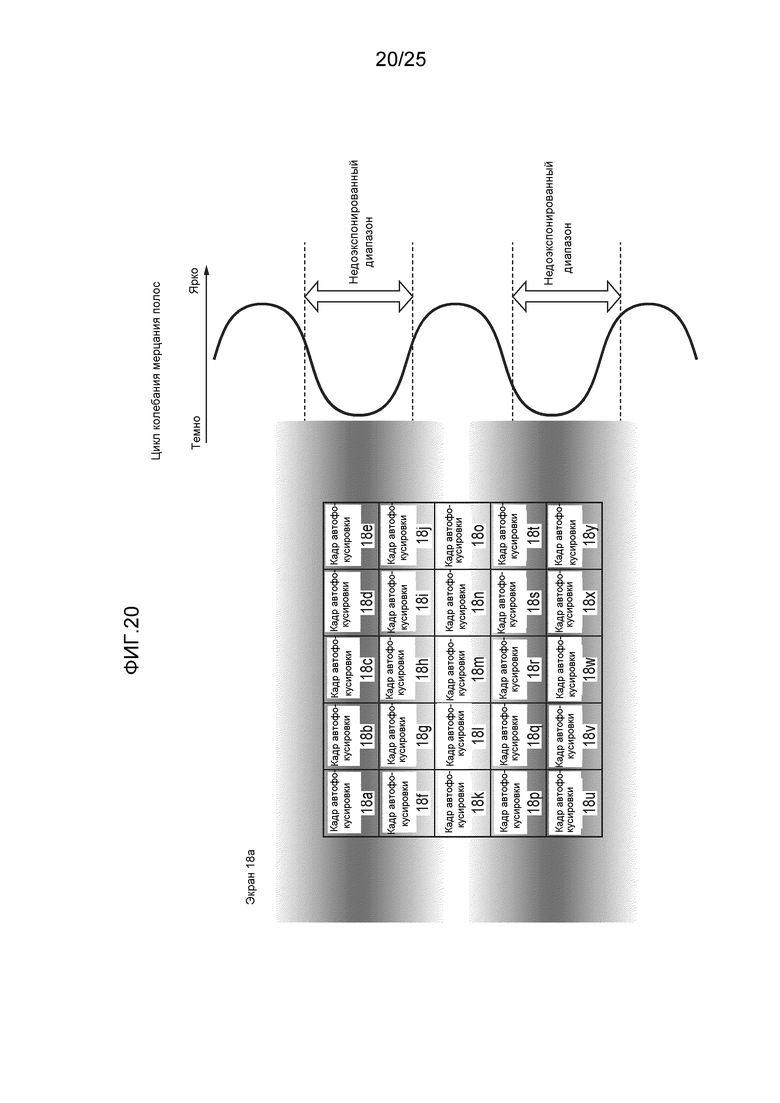
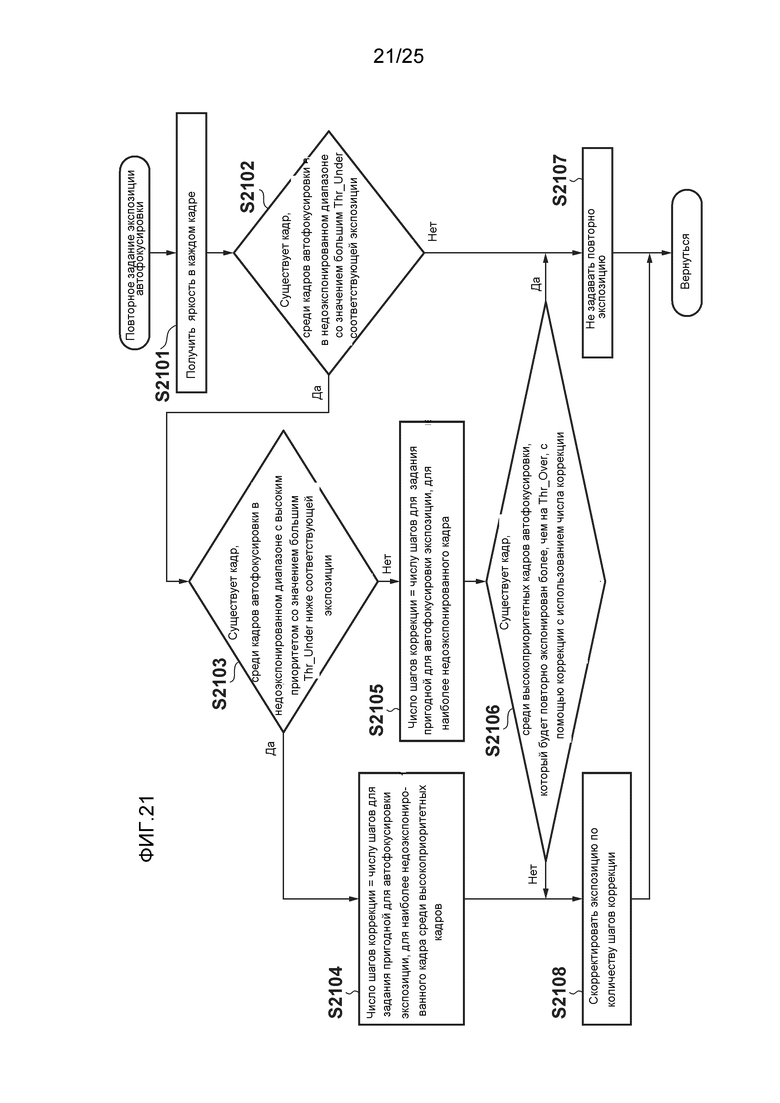
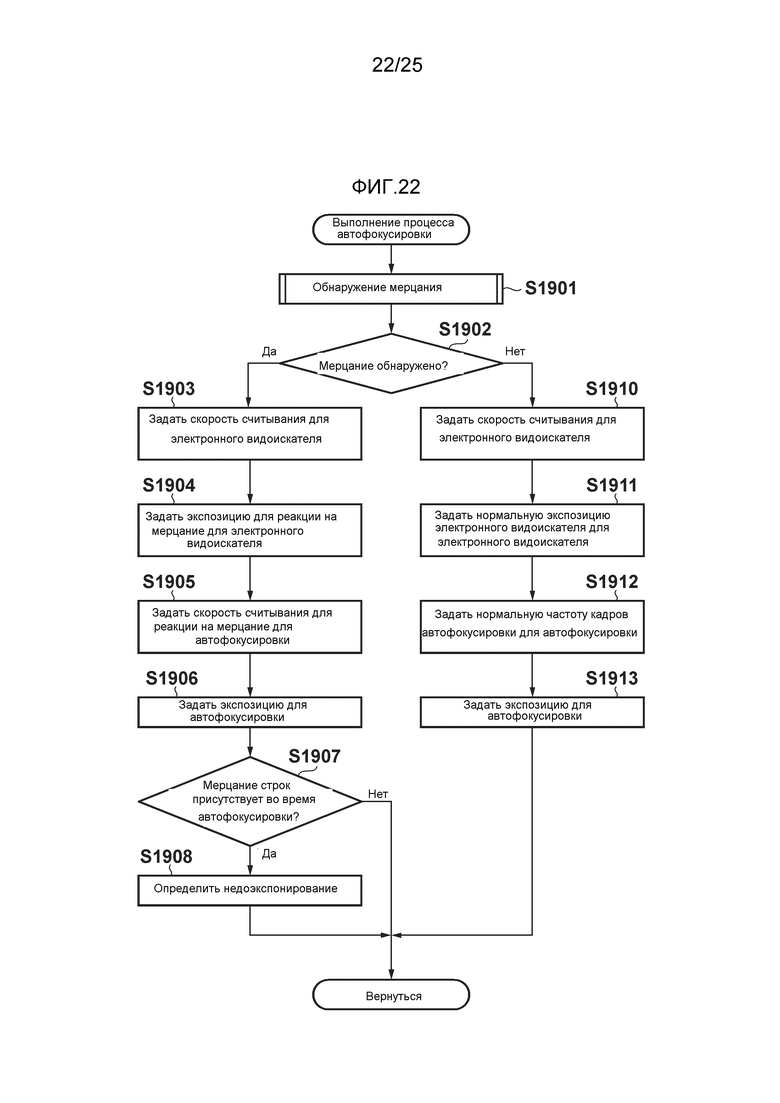
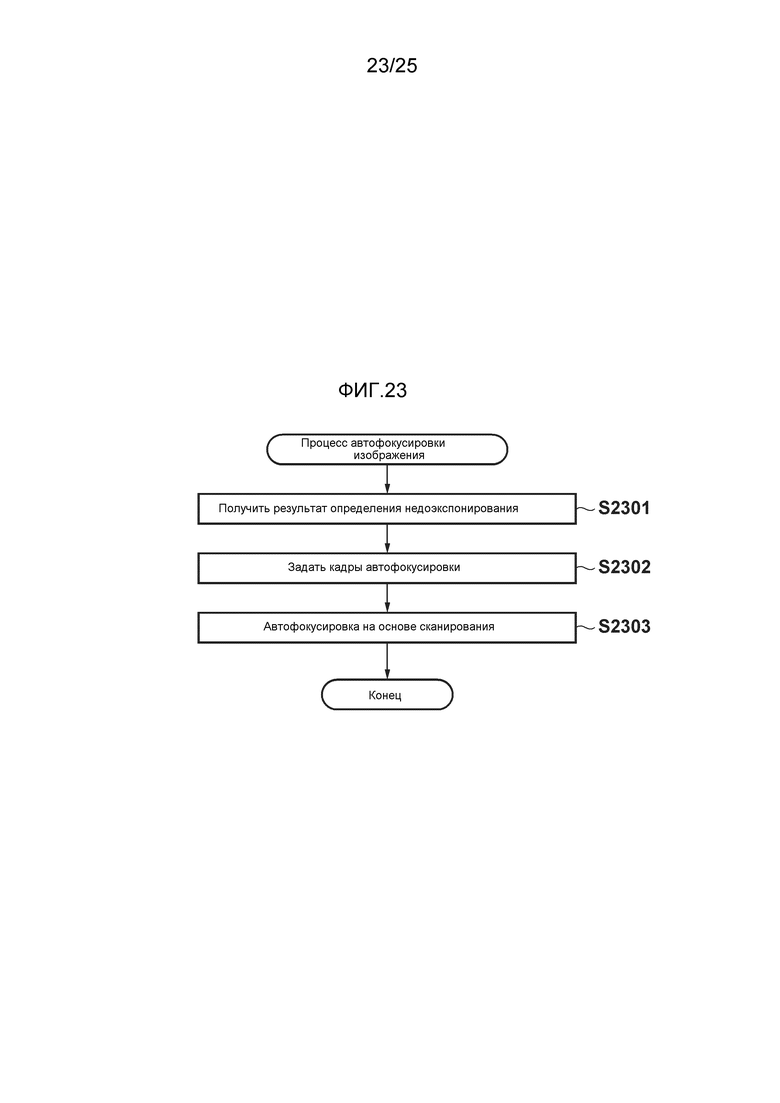
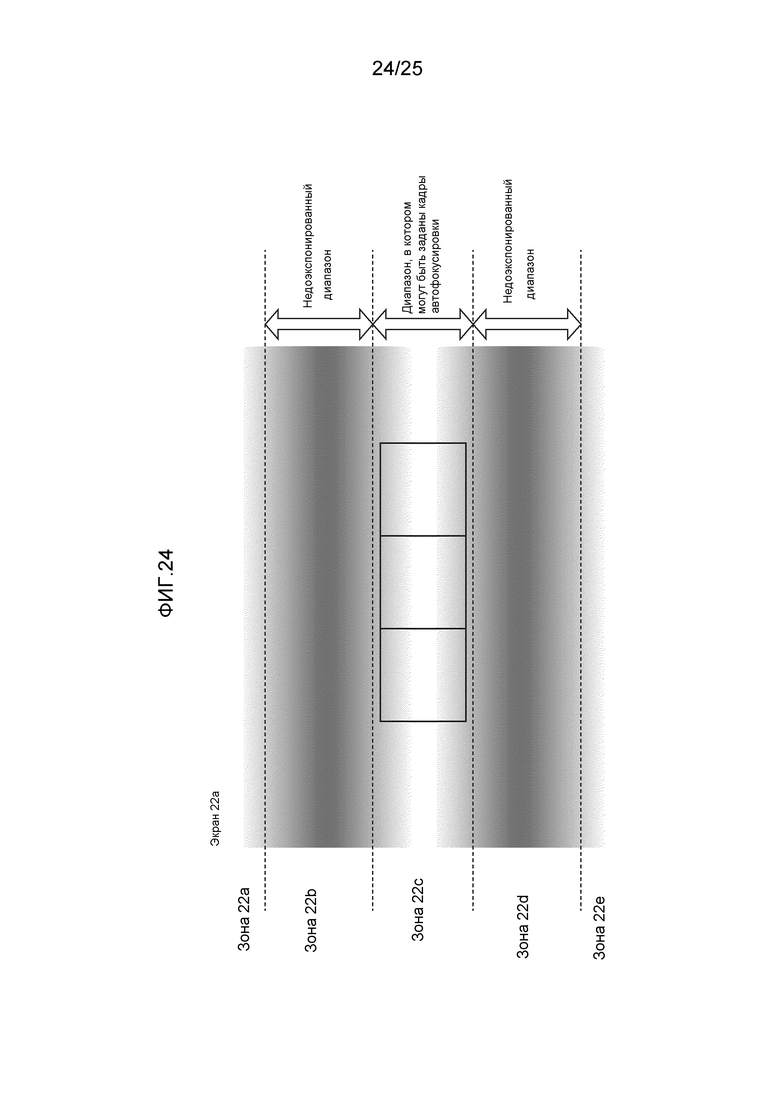
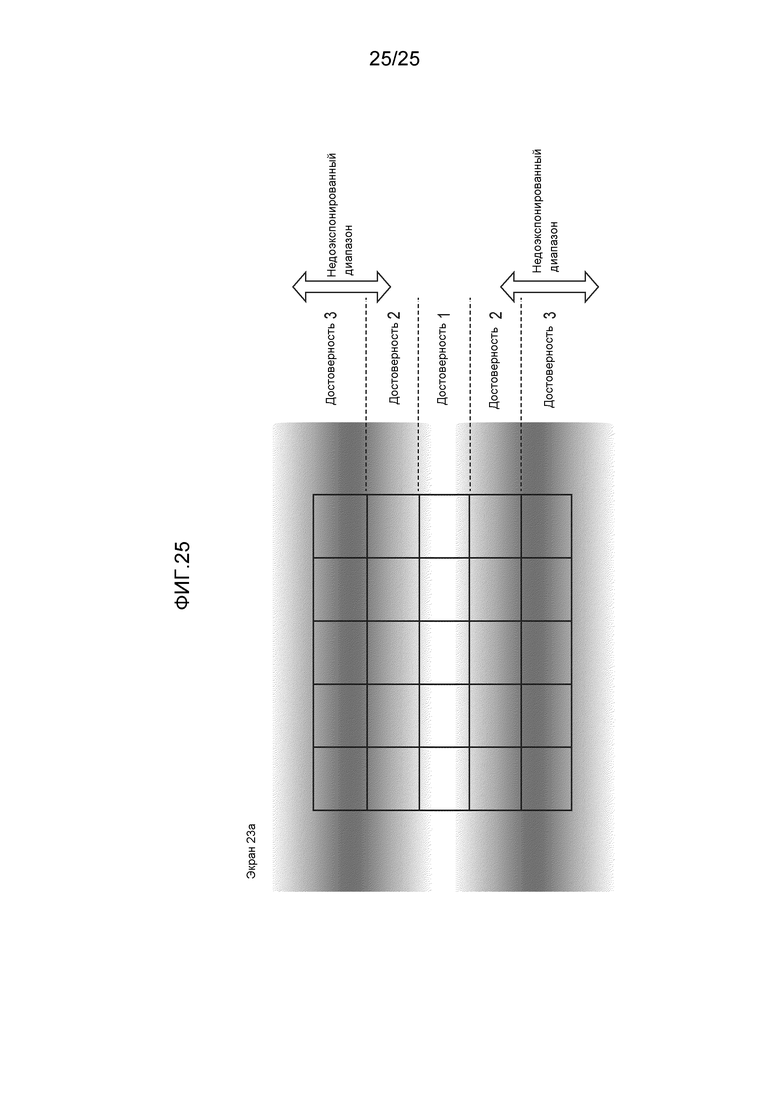
Изобретение относится к области оптического приборостроения и касается устройства захвата изображения. Устройство включает в себя блок восприятия изображения, блок управления и блок вычислений. Блок восприятия изображений осуществляет фотоэлектрическое преобразование изображения объекта. Блок управления считывает сигналы изображения из пикселей в первой и второй зонах. Блок вычислений осуществляет вычисление значений фокуса на основе сигналов второй зоны пикселей при перемещении фокусной линзы и определяет положение наилучшей фокусировки. В устройство включены блок фотометрии и блок оценки, который определяет наличие точечного источника в области обнаружения фокуса. Кроме того, устройство может включать в себя командный блок и блок подсчета, выполненный с возможностью подсчета среди сигналов изображения для обнаружения фокуса числа тех сигналов изображения, которые имеют значения яркости, большие или равные заранее определенному значению. Дополнительно устройство включает в себя блок обнаружения мерцания, выполненный с возможностью обнаружения присутствия или отсутствия мерцания и частоты мерцания. Технический результат заключается в повышении качества получаемых изображений. 6 н. и 9 з.п. ф-лы. 25 ил.
1. Устройство захвата изображения, содержащее:
блок восприятия изображения, имеющий множество пикселей, расположенных в двух измерениях, выполненный с возможностью фотоэлектрического преобразования изображения объекта, сформированного оптической системой формирования изображения, включающей в себя фокусную линзу, и вывода электрического сигнала изображения;
блок управления, выполненный с возможностью выполнять считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
блок вычислений, выполненный с возможностью вычисления множества оценочных значений фокуса на основе сигналов изображения, считанных из пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и нахождения сфокусированной позиции фокусной линзы на основе множества оценочных значений фокуса;
блок фотометрии; и
блок оценки, выполненный с возможностью оценки присутствия или отсутствия объекта - точечного источника света в области обнаружения фокуса,
причем блок управления принимает первый сигнал изображения, считанный из первой зоны, в качестве сигнала изображения для отображения, подлежащего выводу на блоке отображения, управляет по меньшей мере одним из скорости считывания и условия экспозиции первой зоны на основе результатов фотометрии блока фотометрии, и управляет по меньшей мере одним из скорости считывания и условия экспозиции так, что вторая зона, которая отличается от первой зоны, является недоэкспонированной относительно первой зоны на основании результатов оценки посредством блока оценки, а
блок вычисления вычисляет множество оценочных значений фокуса на основе сигналов изображения, считанных из второй зоны, и находит сфокусированную позицию фокусной линзы на основе упомянутого множества оценочных значений фокуса.
2. Устройство захвата изображения по п. 1, причем в случае, когда была дана оценка присутствия объекта - точечного источника света в каждой из упомянутого множества областей обнаружения фокуса, и достоверность каждого из оценочных значений фокуса, вычисленного блоком вычисления, меньше заранее определенного значения достоверности, блок вычисления вычисляет оценочное значение фокуса на основе сигналов изображения, выведенных из первой зоны, содержащейся в упомянутом множестве областей обнаружения фокуса.
3. Устройство захвата изображения по любому из пп. 1 и 2, дополнительно содержащее:
командный блок, выполненный с возможностью давать команду подготовки захвата изображения,
причем блок вычислений
вычисляет оценочные значения фокуса на основе сигналов изображения, выведенных от пикселей, включенных в область обнаружения фокуса блока восприятия изображения в заранее определенном цикле, и перемещает фокусную линзу так, что оценочное значение фокуса увеличивается, перед выдачей команды подготовки захвата изображения; и
вычисляет упомянутое множество оценочных значений фокуса при множестве различных позиций фокусной линзы при перемещении фокусной линзы после выдачи команды захвата изображения.
4. Устройство захвата изображения, содержащее:
блок восприятия изображения, имеющий множество пикселей, расположенных в двух измерениях, выполненный с возможностью фотоэлектрического преобразования изображения объекта, сформированного оптической системой формирования изображения, включающей в себя фокусную линзу, и вывода электрического сигнала изображения;
блок управления, выполненный с возможностью выполнять считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
блок вычислений, выполненный с возможностью вычисления множества оценочных значений фокуса на основе сигналов изображения, считанных из пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и нахождения сфокусированной позиции фокусной линзы на основе множества оценочных значений фокуса,
причем блок управления принимает первый сигнал изображения, считанный из первой зоны, в качестве сигнала изображения для отображения, подлежащего выводу на блоке отображения,
причем устройство дополнительно содержит:
командный блок, выполненный с возможностью выдачи команды подготовки захвата изображения;
блок подсчета, выполненный с возможностью подсчета среди сигналов изображения для обнаружения фокуса числа тех сигналов изображения, которые имеют значения яркости, большие или равные заранее определенному значению;
первый полосовой фильтр и
второй полосовой фильтр, выполненный с возможностью пропускания более высокой полосы, чем первый полосовой фильтр,
причем в случае, когда число сигналов изображения, имеющих значения яркости, большие или равные заранее определенному значению, рассчитанному перед тем, как выдается команда подготовки захвата изображения, больше или равно заранее определенному числу, блок управления сокращает период накопления заряда используемой для обнаружения фокуса зоны блока восприятия изображения на заданный период времени,
причем в случае, когда число сигналов изображения, имеющих значения яркости, большие или равные заранее определенному значению, рассчитанному после выдачи команды подготовки захвата изображения, меньше заранее определенного числа, задается первый полосовой фильтр, а в случае, когда число сигналов изображения, имеющих значения яркости, большие или равные заранее определенному значению, рассчитанному после выдачи команды подготовки захвата изображения, больше или равно заранее определенному числу, задается второй полосовой фильтр; и
при этом блок вычислений вычисляет оценочное значение фокуса с использованием сигнала изображения, который прошел через первый полосовой фильтр, который был задан, или второй полосовой фильтр, который был задан.
5. Устройство захвата изображения по п. 4, в котором в случае, когда число сигналов изображения, имеющих значения яркости, большие или равные заранее определенному значению, больше или равно заранее определенному числу, высокочастотная составляющая, полученная из сигналов изображения для обнаружения фокуса, нормализуется с помощью интегрального значения яркости.
6. Устройство захвата изображения по п. 4, в котором условием экспозиции является период накопления заряда.
7. Устройство захвата изображения, содержащее:
блок восприятия изображения, имеющий множество пикселей, расположенных в двух измерениях, выполненный с возможностью фотоэлектрического преобразования изображения объекта, сформированного оптической системой формирования изображения, включающей в себя фокусную линзу, и вывода электрического сигнала изображения;
блок управления, выполненный с возможностью выполнять считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
блок вычислений, выполненный с возможностью вычисления множества оценочных значений фокуса на основе сигналов изображения, считанных из пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и нахождения сфокусированной позиции фокусной линзы на основе множества оценочных значений фокуса,
причем блок управления принимает первый сигнал изображения, считанный из первой зоны, в качестве сигнала изображения для отображения, подлежащего выводу на блоке отображения,
причем устройство дополнительно содержит
блок обнаружения мерцания, выполненный с возможностью обнаружения присутствия или отсутствия мерцания и частоты мерцания,
причем в случае, когда происходит мерцание, блок управления управляет условием экспозиции таким образом, что период накопления заряда первой зоны является целым кратным частоты мерцания, и управляет скоростью считывания второй зоны, которая отличается от первой зоны, таким образом, чтобы быть целым кратным частоте мерцания.
8. Устройство захвата изображения по п. 7, причем в случае, когда было обнаружено мерцание, применяется усиление к тем сигналам изображения среди сигналов изображения в области обнаружения фокуса, яркость которых колеблется циклически из-за мерцания и находится ниже заранее определенного диапазона яркости.
9. Устройство захвата изображения по п. 7, причем в случае обнаружения мерцания область обнаружения фокуса задается таким образом, что яркость, которая циклически колеблется из-за мерцания, находится в пределах заранее определенного диапазона яркости.
10. Устройство захвата изображения по п. 7, в котором в случае, когда задано множество областей обнаружения фокуса и было обнаружено мерцание, задается более высокая достоверность для тех областей обнаружения фокуса из множества областей обнаружения фокуса, в которых яркость, которая колеблется циклически вследствие мерцания, находится в пределах заранее определенного диапазона яркости, чем для области обнаружения фокуса, в которой яркость находится в более низком диапазоне яркости, чем заранее определенный диапазон яркости, а позиция, в которую должна быть перемещена фокусная линза, определяется преимущественно с использованием сфокусированной позиции, полученной из сигнала изображения для обнаружения фокуса от той области обнаружения фокуса из упомянутого множества областей обнаружения фокусировки, которая имеет более высокую достоверность.
11. Устройство захвата изображения по любому из пп. 7-10, в котором одно и то же значение диафрагмы задается в качестве условия экспозиции для первой зоны и второй зоны.
12. Устройство захвата изображения по любому из пп. 7-10, в котором в случае, когда скоростью считывания второй зоны невозможно управлять до целого кратного частоты мерцания, блок управления корректирует сигнал изображения от второй зоны в соответствии с циклическим колебанием яркости, вызванным мерцанием.
13. Способ управления устройством захвата изображения по любому из пп. 1-3, включающий:
этап управления, на котором выполняют считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
этап вычисления, на котором вычисляют множество оценочных значений фокуса на основе сигналов изображения, выведенных от пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и находят сфокусированную позицию фокусной линзы на основе множества оценочных значений фокуса,
причем первый сигнал изображения, считанный из первой зоны, принимают в качестве сигнала изображения для отображения, подлежащего выводу на блок отображения.
14. Способ управления устройством захвата изображения по любому из пп. 4-6, включающий:
этап управления, на котором выполняют считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
этап вычисления, на котором вычисляют множество оценочных значений фокуса на основе сигналов изображения, выведенных от пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и находят сфокусированную позицию фокусной линзы на основе множества оценочных значений фокуса,
причем первый сигнал изображения, считанный из первой зоны, принимают в качестве сигнала изображения для отображения, подлежащего выводу на блок отображения.
15. Способ управления устройством захвата изображения по любому из пп. 7-12, включающий:
этап управления, на котором выполняют считывание сигналов изображения из пикселей в первой зоне и считывание сигналов изображения из пикселей во второй зоне параллельно при разных условиях экспозиции;
этап вычисления, на котором вычисляют множество оценочных значений фокуса на основе сигналов изображения, выведенных от пикселей, присутствующих в области обнаружения фокуса во второй зоне на множестве различных позиций фокусной линзы при перемещении фокусной линзы, и находят сфокусированную позицию фокусной линзы на основе множества оценочных значений фокуса,
причем первый сигнал изображения, считанный из первой зоны, принимают в качестве сигнала изображения для отображения, подлежащего выводу на блок отображения.
| US 2009034954 A1, 05.02.2009 | |||
| US 2012120277 A1, 17.05.2012 | |||
| US 2008218611 A1, 11.09.2008 | |||
| JP 2007072013 A, 22.03.2007. |

