Область техники, к которой относится изобретение
Настоящее изобретение относится к исполнительным элементам, применяемым для колебательного движения нагрузки, и, более конкретно, к исполнительным элементам, использующим один или несколько элементов с памятью формы. Изобретение, в частности, пригодно для катетеров, предназначенных для формирования изображения, имеющих ультразвуковой преобразователь, установленный с возможностью колебательного движения для сканирования объема, охватывающего внутреннюю анатомическую область, представляющую интерес.
Уровень техники
Исполнительные элементы используются в различных вариантах применения для управляемого движения механизма или нагрузки. Все чаще используются исполнительные элементы, которые занимают мало места, имеют высокую надежность и имеют низкие требования к питанию, что представляет уникальные конструктивные задачи.
В исполнительных элементах могут использоваться материалы с памятью формы для получения движения. Материалы с памятью формы представляют собой материалы, в которых происходят изменения размеров при приложении внешнего побудителя, такого как температура или магнитное поле. Существуют два типа материалов с памятью формы, которые могут выполнять индуцированные теплом реверсивные изменения формы: 1) сплавы с памятью формы (SMA), которые представляют собой сплавы металлов, в которых происходят реверсивные изменения фазы между двумя разными кристаллографическими фазами после изменения температуры, и 2) полимеры с памятью формы (SMP), которые обычно состоят из двухкомпонентных полимеров и двух фаз, одна с более высокой температурой плавления, чем другая. Когда полимеры с памятью формы нагревают выше определенной температурой стеклования, одна фаза, в общем, находится в резиноподобной фазе и может легко деформироваться. При последующем охлаждении ниже такой температуры стеклования, SMP сохраняет свою заданную постоянную форму. Отличительная особенность SMP по сравнению со всеми другими полимерами состоит в том, что такое изменение размеров отмечается резкой температурой перехода и плато резиноподобного состояния, а также способностью обеспечивать значительные растяжения без образования постоянного локального повреждения материала.
Примеры значимых сплавов с памятью формы (SMA) представляет собой нитинол, сплав никеля и титана, сплавы на основе меди и нержавеющие стали с памятью формы FeMnSiCrNi. Эти сплавы металлов характеризуются тем, что они могут быть нагреты для получения соответствующего мартенситно-аустенитного преобразования кристаллографической фазы, в результате чего происходит уменьшение длины. Последующее охлаждение сплава с памятью формы может привести к аустенитно-мартенситному преобразованию фазы, и форма остается без изменений, в результате чего сплав может вернуться к свой первоначальной длине в условиях приложенной нагрузки. Если материал с памятью формы функционально связан с другими элементами, изменения фазы можно использовать для генерирования сил, которые могут использоваться для создания движения других элементов. Такой нагрев может быть сформирован путем пропускания тока через материал с памятью формы.
Катетеры - медицинские устройства, которые могут быть вставлены в сосуд тела человека, полость или проток и которыми можно манипулировать, используя участок, который выступает за пределы тела. Как правило, катетеры выполнены относительно тонкими и гибкими, что способствует их перемещению/отводу вдоль нелинейных каналов. Катетеры могут использоваться для самого разного назначения, включая в себя установку внутри тела диагностических и/или терапевтических устройств. Например, катетеры могут использоваться для установки устройства формирования внутреннего изображения (например, ультразвуковых преобразователей), для разворачивания имплантируемых устройств (например, стентов-графтов, фильтры для полости вены), и/или выполнения терапевтического лечения (например, катетеры для абляции, подачи лекарства).
В этом отношении, все чаше используется технология формирования ультразвукового изображения для получения видимых изображений структур. В широком смысле, в ультразвуковом преобразователе, обычно состоящем из ряда индивидуально активируемых пьезоэлектрических элементов, установленных в виде массива, подают соответствующие сигналы привода таким образом, что импульс ультразвуковой энергии распространяется внутри тела пациента. Ультразвуковая энергия отражается на границах перехода между структурами с различным акустическим импедансом. Те же самые или другие преобразователи детектируют прием обратной энергии и обеспечивают соответствующий выходной сигнал. Этот сигнал может быть обработан известным способом для получения видимого на экране дисплея изображения границ перехода между структурами и, следовательно, самих структур.
Катетеры для внутрисердечной эхокардиографии (ICE) стали предпочтительным способом формирования изображения для использования в структурных интервенциях в сердце, поскольку они обеспечивают высокое разрешение 2-D ультразвукового изображения структуры мягкой ткани сердца. Кроме того, формирование ICE изображений не приводит к образованию ионизирующего излучения во время процедуры. Катетеры ICE может использовать хирургический врач-кардиолог и персонал в пределах контекста их нормальной процедурной работы и без привлечения другого персонала больницы. Современные технологии катетера ICE, к сожалению, имеют ограничения. Обычные катетеры ICE ограничены генерированием только 2-D изображений. Кроме того, клинический врач должен управлять положением катетера и изменять его для съемки многоплановых изображений внутри анатомии. Манипуляции катетером, необходимые для получения специфичных планов 2-D изображения, требуют, чтобы пользователь затратил существенное время для получения навыка управления при работе с простыми механизмами катетера.
В эхокардиографической системе Philips iE33, в которой работает новый 3D чреспищеводный (TEE) зонд (поставляемый компанией Philips Healthcare, Andover, MA, USA), представляет собой первое коммерчески доступное, работающее в режиме реального времени 3D (четырехмерное (4D)) TEE устройство формирования ультразвукового изображения. Эта система предоставляет клиническому врачу возможность формирования 4D изображений, необходимых для более сложных интервенций, но при этом существует ряд существенных недостатков, связанных с этой системой. Из-за большого размера зонда TEE (50-миллиметров в окружности и 16,6 мм в ширину), необходима анестезия пациентов или ввод сильных успокоительных веществ перед вводом зонда (G. Hamilton Baker, MD 4t al.. Usefulness of Live Three-Dimensional Transesophageal Echocardiography in a Congenital Heart Disease Center, Am J Cardiol 2009; 103: 1025-1028)). Это требует, чтобы анестезиолог присутствовал для ввода и отслеживания анестезии пациенту. Кроме того, гемодинамическое состояние пациента может потребовать мониторинга. Кроме того, возникают незначительные и большие сложности в результате использования зонда TEE, включая в себя усложнения от боли в горле до перфорации пищевода. Сложность системы Phillips TEE и зонда требует участия дополнительного персонала, такого как анестезиолог, эхокардиолог и специалист по ультразвуковой диагностике. Это увеличивает время и стоимость процедуры.
Особый интерес представляют приложения катетера для формирования изображений для исполнительных элементов с малыми размерами. Авторы настоящего изобретения осознали необходимость в создании платформы для формирования изображения на основе катетера, которая является достаточно малой для чрескожного доступа с возможностями формирования трехмерного изображения в режиме реального времени (4D). Использование такой системы формирования изображений на основе катетера для визуализации трехмерной архитектуры (3D), например, сердца, на основе режима реального времени во время интервенции является весьма желательным с точки зрения клинической перспективы, поскольку это могло бы способствовать выполнению более сложных процедур, таких как окклюзия придатка левого предсердия, восстановление митрального клапана, и абляция фибрилляции предсердий. Формирование 3D изображения также позволило бы клиническому врачу полностью определять относительное положение структур. Такая возможность могла бы оказаться особенно важной в случаях структурных отклонений в сердце, где типичная анатомия не присутствует. Двумерные массивы преобразователей обеспечивают средство генерирования 3D изображений, но доступные в настоящее время 2-D массивы требуют большого количества элементов для получения достаточного размера апертуры и соответствующего разрешения изображения. Такое большое количество элементов приводит к получению 2-D преобразователя, который невозможно использовать в клинически приемлемых профилях катетера.
На примере того, как внутренние диагностические и терапевтические процедуры продолжают развиваться, авторы настоящего изобретения осознали потребность в улучшенном формировании изображения в ходе процедуры с использованием компактных и маневрируемых катетеров. Более конкретно, авторы настоящего изобретения распознали желательность обеспечения свойств катетеров, которые способствуют избирательной установке положения и управлению исполнительными элементами для компонентов формирования изображения (например, для получения 3D изображения в режиме реального времени), расположенных на дистальном конце катетера, при поддержании относительно малого профиля, способствуя, таким образом, улучшенной функциональности для различных клинических приложений. Как можно видеть, использование ультразвуковых преобразователей в катетерах представляет проблемы, связанные с размерами, в частности, для васкулярного применения. Например, для кардиоваскулярного применения может быть желательным поддерживать максимальный поперечный размер меньше чем приблизительно 12 единиц френч (фр), и более предпочтительно меньше чем приблизительно 10 фр, во время продвижения катетера для формирования изображения в правое предсердие или в другие камеры сердца. Из-за ограничения размера в некоторых анатомических местах положения, например, внутри сердца, желательно, чтобы можно было обеспечить избирательную установку положения, необходимую для достижения требуемых углов обзора в пределах малого анатомического объема, такого как, например, объем с максимальным поперечным размером меньше чем приблизительно 3 см.
Раскрытие изобретения
Настоящее изобретение относится к исполнительным элементам, используемым для колебательного движения нагрузки. Улучшенный исполнительный элемент может включать в себя, по меньшей мере, первый элемент с памятью формы (например, содержащий материал с памятью формы), который может быть активирован для обеспечения, по меньшей мере, участка колебательного движения нагрузки. В рассматриваемых вариантах осуществления исполнительный элемент может дополнительно содержать второй элемент с памятью формы (например, содержащий материал с памятью формы), активируемый для выполнения, по меньшей мере, второго участка колебательного движения нагрузки. Использование одного или нескольких элементов с памятью формы способствует реализации управляемого и надежного колебательного движения нагрузки при компактных размерах и низком потреблении энергии. Первый и второй элементы с памятью формы могут быть активированы, по меньшей мере, с частичным смещением по времени, для выполнения, по меньшей мере, части колебательного движения нагрузки.
В одном аспекте исполнительный элемент может включать в себя корпус, определяющий замкнутый объем. Замкнутый объем может содержать текучую среду. Текучая среда может представлять собой жидкость (например, которая способствует передаче акустического сигнала). По меньшей мере, участок первого элемента с памятью формы исполнительного элемента может быть погружен в текучую среду, и первый теплоизолирующий слой может быть расположен вокруг погруженного участка первого элемента с памятью формы. Точно так же, по меньшей мере, участок второго элемента с памятью формы исполнительного элемента может быть погружен в текучую среду, и второй теплоизолирующий слой может быть расположен вокруг погруженного участка второго теплоизолирующего слоя. Как можно понимать, размещение теплоизолирующего слоя на одном или больше из элемента (элементов) с памятью формы может предпочтительно влиять на скорость передачи тепловой энергии между содержащейся текучей средой и элементом (элементами) с памятью формы. В таком аспекте, например, нагрузка может содержать ультразвуковой преобразователь.
В одном варианте осуществления нагрузку погружают в текучую среду и устанавливают для колебательного движения в угловом диапазоне вокруг оси поворота внутри замкнутого объема, в котором ось поворота является фиксированной относительно замкнутого объема. В этом отношении; исполнительный элемент может включать в себя первый и второй элементы с памятью формы, функционально ассоциированные с нагрузкой, в котором первый и второй элементы с памятью формы могут быть активированы, по меньшей мере, с частичным смещением по времени, для выполнения, по меньшей мере, части поворотного движения нагрузки. Такой вариант осуществления, например, может быть представлен в форме катетера, имеющего удлиненный корпус катетера и участок дистального конца, который расположен на дистальном конце корпуса катетера и определяет замкнутый объем, содержащий нагрузку и текучую среду. В таком варианте осуществления нагрузка может представлять собой ультразвуковой преобразователь, и ультразвуковой преобразователь может быть погружен в текучую среду для передачи и/или приема ультразвукового сигнала.
В некоторых вариантах осуществления первый и второй элементы с памятью формы могут быть соединены с нагрузкой внутри замкнутого объема и погружены в содержащуюся в ней текучую среду. В свою очередь, первый и второй теплоизолирующие слои могут быть расположены вокруг, по меньшей мере, участка первого и второго элементов с памятью формы, соответственно, внутри замкнутого объема и могут быть погружены в текучую среду. Кроме того, первый и второй элементы с памятью формы могут быть индивидуально изолированы для обеспечения электроизоляции.
В вариантах осуществления первый и/или второй теплоизолирующие слои могут иметь теплопроводность от приблизительно 0,03 Вт/(м·К) и 0,20 Вт/(м·К), при измерении при температуре приблизительно 25°C. В вариантах осуществления первый и/или второй теплоизолирующие слои могут иметь теплопроводность от приблизительно 0,05 Вт/(м·К) до 0,08 Вт/(м·К) при измерении при температуре приблизительно 25°C. В одном подходе первый и/или второй теплоизолирующие слои могут содержать фторполимер. В одном варианте осуществления первый и/или второй теплоизолирующие слои могут содержать, по меньшей мере, один материал, выбранный из группы, состоящей из:
политетрафторэтилена (PTFE), расширенного политетрафторэтилена (ePTFE), нанесенного с электростатическим распылением покрытия PTFE, фторированного этиленпропилена, расширенного фторироваванного этиленпропилена, перфторалкокси сополимера, поливинилиден фторида, полиуретана, кремнийорганического каучука, полимерной пленки с плазменным покрытием (например, из низкотемпературного триметилсилана с улучшенными плазмой свойствами), PARYLENE™ и из их смеси и сополимеров. Другие материалы, имеющие аналогичную теплопроводность, также можно использовать. В одном подходе первый и/или второй теплоизолирующие слои могут содержать микропористый материал.
В добавление к первому и/или второму теплоизолирующим слоям, как отмечено выше, исполнительный элемент может включать в себя соответствующий первый и/или второй внешние слои, соответственно, расположенные (например, установленные с помощью клея) вокруг первого и/или второго теплоизолирующих слоев, соответственно. В этом отношении, первый и/или второй внешние слои, предпочтительно, могут быть выполнены с возможностью погружения их в текучую среду, содержащуюся внутри корпуса. В этом отношении, первый и/или второй внешние слои каждый может содержать гидрофобный материал. В одном подходе первый и/или второй внешние слои могут быть выбраны так, чтобы они имели поверхностную энергию меньше чем приблизительно 50 дин/см2. Кроме того, или в качестве альтернативы, первый и/или второй внешние слои могут быть выбраны так, чтобы они имели напряжение, выдерживаемое диэлектриком, по меньшей мере, приблизительно 500 кВ/м.
В одном подходе, в дополнение к тепловым свойствам первого и/или второго теплоизолирующих слоев, как отмечено выше, первый и/или второй теплоизолирующие слои, предпочтительно, могут быть выполнены с возможностью или могут быть выполнены для погружения в текучую среду, содержащуюся внутри корпуса. В этом отношении, первый и/или второй теплоизолирующие слои могут выполнять, как и описанную выше функцию первого и второго теплоизолирующих слоев, так и описанную выше функцию первого и/или второго внешних слоев. Таким образом, каждый из первого и/или второго теплоизолирующих слоев может содержать гидрофобный материал. В одном подходе первый и/или второй теплоизолирующие слои могут быть выбраны так, чтобы они имели поверхностную энергию меньше, чем приблизительно 50 дин/см2. Кроме того, или в качестве альтернативы, первый и/или второй теплоизолирующие слои могут быть выбраны так, чтобы они имели напряжение, которое выдерживает диэлектрик, по меньшей мере, приблизительно 500 кВ/м. В этом отношении, первый и/или второй теплоизолирующие слои могут быть выполнены с возможностью обеспечения упомянутых выше изолирующих свойств совместно с упомянутой выше гидрофобностью и напряжением, которое выдерживает диэлектрик.
Слои, расположенные вокруг, по меньшей мере, участка первого и второго элементов с памятью формы, такие как описанные выше первый и/или второй теплоизолирующие слои и описанные выше первый и/или второй внешние слои, могут иметь модуль удлинения, который позволяет перемещать слои вместе с элементами с памятью формы, когда элементы с памятью формы изменяют длину. В этом отношении, слои могут иметь функцию удлинения и растяжения вместе с элементами с памятью формы без отслаивания, растрескивания или отслоения. Слои могут быть соединены с помощью клея с элементами с памятью формы.
В варианте осуществления, внутри замкнутого объема, электрически активные компоненты могут быть изолированы для ограничения протекания нежелательного тока (например, тока короткого замыкания). Такие электрически активные компоненты могут включать в себя, например, электрически взаимные соединения с элементами с памятью формы и ультразвуковым преобразователем, погруженным в текучую среду. Такая изоляция может, в частности, быть полезной, когда текучая среда внутри замкнутого объема представляет собой жидкость.
В другом аспекте первый элемент с памятью формы может быть активирован для поворота нагрузки (например, ультразвукового преобразователя) в первом направлении вокруг оси поворота. И, наоборот, второй элемент с памятью формы может быть активирован, для поворота нагрузки (например, ультразвукового преобразователя) во втором направлении вокруг оси поворота, в котором первое направление противоположно второму направлению.
В одной компоновке элементы с памятью формы могут работать так, что изменяется их длина, по меньшей мере, приблизительно на 1%, в результате активации (например, в результате нагрева, при пропускании через них тока). В другой компоновке элементы с памятью формы могут работать с изменением длины, по меньшей мере, приблизительно на 2%, в результате активации. В конкретном варианте осуществления длина элементов с памятью формы может изменяться приблизительно на 4%, в результате активации.
В разных вариантах осуществления первый и второй элементы с памятью формы могут быть определены, как соответствующие первой и второй длинам провода с памятью формы, соответственно. В одном подходе первая и вторая длины провода с памятью формы могут содержать физически отдельные первый и второй провода. В другом подходе длина первого и второго проводов с памятью формы может быть определена разными участками, например, первой и второй длиной, соответственно, непрерывного провода с памятью формы.
Первый конец первого отрезка провода с памятью формы может быть жестко соединен с одним элементом из корпуса (например, на дистальном концевом участке катетера) и нагрузки (например, с ультразвуковым преобразователем) на первой стороне оси поворота. Аналогично, первый конец второго отрезка провода с памятью формы может быть жестко соединен с одним элементом из корпуса (например, на дистальном участке катетера) и нагрузки (например, с ультразвуковым преобразователем) на второй стороне оси поворота, противоположной первой стороне.
В одном подходе первый отрезок провода с памятью формы может быть соединен с соответствующим другим элементом из нагрузки (например, с ультразвуковым преобразователем) и корпуса в первом положении соединения. Кроме того, второй отрезок с памятью формы может быть соединен с соответствующим другим элементом из нагрузки (например, с ультразвуковым преобразователем) и корпуса во втором местоположении соединения, в котором первое и второе местоположения соединения расположены на противоположных сторонах оси поворота.
В одном варианте осуществления каждый из первого и второго отрезков провода с памятью формы может иметь соответствующие вторые концы, которые жестко соединены с соответствующим одним элементом из корпуса и нагрузки (например, с ультразвуковым преобразователем). Кроме того, первый и второй отрезки провода с памятью формы могут быть соединены между их противоположными первым и вторым концами с соответствующим другим элементом из корпуса и нагрузки (например, с ультразвуковым преобразователем). В этом отношении, отмеченные первое и второе места положения соединения могут быть смещены на противоположных сторонах оси поворота. В одном варианте осуществления первое и второе места положения смещения могут быть, по существу, эквидистантными от оси поворота. При такой компоновке первый и второй отрезки провода с памятью формы могут быть расположены симметрично относительно нагрузки (например, ультразвукового преобразователя).
Первый и второй отрезки провода с памятью формы могут быть расположены так, что каждый из них включают в себя соответствующие первый и второй участки, которые, соответственно, определяют первый и второй углы раствора. В свою очередь, первый и второй отрезки провода с памятью формы могут быть расположены так, чтобы первый и второй углы раствора увеличивались и уменьшались для перемещения нагрузки, в ответ на соответствующие активацию и деактивацию первого и второго элементов с памятью формы, соответственно. Путем размещения первого и второго отрезков с памятью формы так, что они включают в себя углы раствора, может быть достигнуто эффективное смещение, по меньшей мере, приблизительно от 10% до 20% длины провода. Другими словами, может быть достигнуто эффективное удлинение, по меньшей мере, приблизительно от 10% до 20%, в котором эффективное удлинение представляет собой удлинение, которое могло бы потребоваться для получения аналогичного движения нагрузки с помощью элемента с памятью формы, расположенного, в общем, перпендикулярно нагрузке и расположенного в аналогичном объеме, что и у отрезков провода с памятью формы с углами раствора.
В другом варианте осуществления первый отрезок провода с памятью формы может содержать первый конец, соединенный с корпусом (например, дистальный концевой элемент исполнительного элемента) на первой стороне оси поворота, и второй конец, соединенный с нагрузкой (например, ультразвуковым преобразователем) на второй стороне оси поворота, противоположной первой стороне. Аналогично второй отрезок провода с памятью формы может иметь первый конец, соединенный с корпусом на первой стороне оси поворота, и второй конец, соединенный с нагрузкой (например, ультразвуковым преобразователем) на второй стороне оси поворота.
В еще одном варианте осуществления первый отрезок провода с памятью формы может содержать первый и второй концы, жестко соединенные с одним элементом из корпуса (например, на участке дистального конца катетера) и нагрузки (например, с ультразвуковым преобразователем). Кроме того, элемент соединения (например, опора, столбик и т.д.) может быть предусмотрен и зафиксирован на другом одном элементе из корпуса и нагрузки, при этом первый отрезок с памятью формы соединен с элементом соединения для поворота нагрузки в первом направлении во время активации первого отрезка провода с памятью формы. Аналогично, второй отрезок провода с памятью формы может содержать первый конец и второй конец, жестко соединенные с одним элементом из корпуса и нагрузки, при этом второй отрезок провода с памятью формы соединен с элементом соединения для поворота нагрузки во втором направлении во время активации второго отрезка провода с памятью формы.
В некоторых вариантах осуществления центральная ось нагрузки (например, ультразвукового преобразователя) может быть параллельна оси поворота. В других вариантах осуществления такая центральная ось может совпадать с осью поворота.
В различных вариантах осуществления источник энергии привода может быть включен для многократной подачи первого и второго сигналов энергии во время соответствующих первого и второго периодов времени в первый и второй элементы с памятью формы, соответственно. Источник энергии привода может работать так, что он определят первый интервал времени между концом каждого из первого периода времени и началом каждого из второго периода времени, при этом, по меньшей мере, второй элемент с памятью формы предусмотрен с упругим натяжением во время, по меньшей мере, части каждого из первого интервала времени так, что второй элемент с памятью формы может работать так, что он влияет, по меньшей мере, на часть колебательного поворотного движения нагрузки (например, ультразвукового преобразователя) во время каждого из первого интервала времени. Кроме того, источник энергии привода может работать так, что он многократно подает первый и второй сигналы энергии со вторым интервалом времени, определенными между концом каждого второго периода времени и началом каждого первого периода времени. В свою очередь, первый элемент с памятью формы может быть предусмотрен с упругим натяжением во время, по меньшей мере, части каждого второго интервала времени так, что первый элемент с памятью формы во время работы влияет, по меньшей мере, на часть колебательного, поворотного движения нагрузки (например, ультразвукового преобразователя) во время каждого второго интервала времени. Как можно видеть, первый и второй элементы с памятью формы могут использоваться для влияния на разные части колебательного, поворотного движения нагрузки, соответствующего противоположным конечным частям углового диапазона поворотного движения.
В определенных вариантах осуществления, по меньшей мере, первый магнитный элемент может быть соединен с удержанием с одной из корпуса (например, на дистальном конечном участке катетера) и нагрузки (например, с ультразвуковым преобразователем) и расположен так, что он влияет на, по меньшей мере, часть колебательного поворотного движения нагрузки (например, ультразвукового преобразователя). В одном подходе первый магнитный элемент может включать в себя постоянный магнит; например, постоянный магнит типа неодим-железо-бор с покрытием или самарий-кобальтовый магнит. В другом подходе первый магнитный элемент может содержать электромагнитный элемент.
Аналогично, второй магнитный элемент может быть соединен с удержанием на одном элементе из корпуса и нагрузки для влияния, по меньшей мере, на вторую часть колебательного поворотного движения нагрузки. В этом отношении, первая и вторая части колебательного поворотного движения нагрузки могут соответствовать противоположным конечным частям заданного углового диапазона поворотного движения нагрузки. В некоторых вариантах осуществления первый магнитный элемент и/или второй магнитный элемент могут во время работы прикладывать силу притяжения. Аналогично, в некоторых вариантах осуществления первый магнитный элемент и/или второй магнитный элемент могут во время работы прикладывать силу отталкивания. Приложение силы первым и/или вторым магнитными элементами может быть направлено на намагничивающийся элемент, соединенный с другим одним элементом из корпуса и нагрузки. В другом варианте осуществления приложение силы первым и/или вторым магнитными элементами может быть направлено, по меньшей мере, на один дополнительный магнитный элемент, соединенный с другим одним элементом из корпуса и нагрузки.
Как отмечено, описанные выше исполнительные элементы, в частности, пригодны для воплощения в катетере. В этом отношении, первый и второй элементы с памятью формы могут быть расположены внутри корпуса для выполнения колебательного движения массива ультразвукового преобразователя на дистальном конечном участке катетера. Кроме того, дистальный конечный участок может быть предусмотрен так, чтобы пользователь мог его избирательно устанавливать относительно корпуса катетера. В некоторых вариантах осуществления дистальный конечный участок может быть предусмотрен для избирательной установки угла в диапазоне углов относительно корпуса катетера. В качестве примера катетер может включать в себя шарнир для соединения дистального конечного участка в корпусе катетера. В других вариантах осуществления дистальный конечный участок может быть предусмотрен для избирательного поворота в диапазоне углов относительно корпуса катетера.
В еще одном, другом аспекте, способ влияния на колебания, поворотные движения и нагрузку предусмотрен. Способ может включать в себя первую активацию первого элемента с памятью формы, функционально взаимосвязанного с нагрузкой, для поворота нагрузки в первом направлении, и затем вторую активацию второго элемента с памятью формы, функционально взаимосвязанного с нагрузкой, для поворота нагрузки во втором направлении, противоположном первому направлению. Способ может дополнительно включать в себя повторение первого и второго этапов активации в соответствии с заданным циклом, для выполнения колебаний, поворотного движения нагрузки в угловом диапазоне относительно оси поворота. В варианте осуществления способ может представлять собой способ для использования в катетере, где нагрузка представляет собой ультразвуковой преобразователь, погруженный в текучую среду и установленный с возможностью поворотного движения вокруг оси поворота в замкнутом объеме, где замкнутый объем определен дистальным концом участка, расположенного с удержанием на дистальном конце удлиненного корпуса катетера. В таком варианте осуществления способ может дополнительно включать в себя работу ультразвукового преобразователя, для передачи и/или приема акустических сигналов через текучую среду во время, по меньшей мере, части возникновения каждого первого и/или второго этапов активации.
В одном подходе первый этап активации может включать в себя первое приложение первого электрического сигнала к первому элементу с памятью формы для изменения первого элемента с памятью формы с первой конфигурации на вторую конфигурацию и, таким образом, для воздействия первой силы на нагрузку. Этот подход может также включать в себя второй этап активации, содержащий второе приложение второго электрического сигнала ко второму элементу с памятью формы, для изменения второго элемента с памятью формы с первой конфигурации на вторую конфигурацию и, таким образом, для приложения второй силы к нагрузке. Способ может также включать в себя, использование первой силы для возврата второго элемента с памятью формы из его второй конфигурации в его первую конфигурацию, и использование второй силы для возврата первого элемента с памятью формы из его второй конфигурации в его первую конфигурацию.
В варианте осуществления, колебательное, поворотное движение ультразвукового преобразователя, достигаемое в результате повторения первого и второго этапов активации, может возникать с частотой от 1 до 50 Гц, или от 8 до 30 Гц. В другом варианте осуществления, колебательное, поворотное движение ультразвукового преобразователя, достигаемое в результате повторения первого и второго этапов активации, может выполняться с частотой, по меньшей мере, 10 Гц; в еще одном, другом варианте осуществления, частота может составлять, по меньшей мере, 50 Гц.
В одной компоновке первый элемент с памятью формы может сокращаться во время первого этапа приложения, и второй элемент с памятью формы может сокращаться во время второго этапа приложения. Элементы с памятью формы могут быть выполнены в форме проводов с памятью формы.
В различных вариантах осуществления первый и второй элементы с памятью формы могут быть определены соответствующими первым и вторым отрезками провода с памятью формы, соответственно. В одном подходе первый и второй отрезки провода с памятью формы могут содержать физически отдельные первый и второй провода. В другом подходе первый и второй отрезки провода с памятью формы могут быть определены разными первым и вторым отрезками, соответственно, непрерывного провода с памятью формы. Первый и второй участки могут быть определены разными первым и вторым отрезками, соответственно, непрерывного провода с памятью формы или путем физического разделения первого и второго проводов.
В некоторых вариантах осуществления каждый из первого и второго элементов с памятью формы может включать в себя соответствующие первый и второй участки, которые определяют соответствующие первый и второй углы раствора, соответственно. В таких вариантах осуществления способ может включать в себя увеличение первого угла раствора и уменьшение второго угла раствора во время первого этапа приложения, и увеличение второго угла раствора и уменьшения первого угла раствора во время второго этапа приложения.
В одном подходе заданный цикл может включать в себя первый временной интервал между концом первого этапа приложения и началом второго этапа приложения. Такой подход может включать в себя использование упругого отклика второго элемента с памятью формы во время каждого первого интервала для инициирования поворотного движения нагрузки во втором направлении. Заданный цикл может включать в себя второй временной интервал между концом второго этапа приложения и началом первого этапа приложения, и настоящий подход может дополнительно включать в себя использование упругого отклика первого элемента с памятью формы во время каждого возникновения второго интервала, для инициирования шарнирного движения нагрузки в первом направлении.
В варианте осуществления способ может включать в себя: используют магнит для приложения магнитной силы к нагрузке, для воздействия, по меньшей мере, на части колебательного поворотного движения. Способ также может включать в себя использование второго магнита для приложения магнитной силы, для влияния, по меньшей мере, на другой участок колебательного, поворотного движения. В одном подходе первый и второй магниты могут влиять на противоположные концевые элементы углового диапазона.
Множество дополнительных свойств и преимуществ настоящего изобретения будут понятны для специалиста в данной области техники после рассмотрения описаний вариантов осуществления, представленных ниже.
Краткое описание чертежей
На фиг.1 показан вид сбоку одного варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.2A показан вид в перспективе выбранных компонентов варианта осуществления исполнительного элемента по фиг.1.
На фиг.2B показан вид в перспективе выбранных компонентов варианта осуществления исполнительного элемента по фиг.1 вместе с альтернативными компонентами исполнительного элемента.
На фиг.3A и 3B показаны виды с торца выбранных компонентов варианта осуществления исполнительного элемента по фиг.1, показанных в разное время выполнения операции.
На фиг.3C показан вид с торца выбранных компонентов варианта осуществления исполнительного элемента по фиг.1 с первым примером вспомогательного магнита.
На фиг 3D показан вид с торца выбранных компонентов варианта осуществления исполнительного элемента по фиг.1 со вторым примером вспомогательного магнита.
На фиг.4A показан вид сбоку другого варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.4B показан вид сбоку дополнительного варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.4C показан вид сбоку дальнейшего варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.5A, 5B и 5C показаны виды с торца выбранных компонентов варианта осуществления исполнительного элемента по фиг.4A, показанные в разное время выполнения операции.
На фиг.5AA, 5BB и 5CC показаны виды с торца выбранных компонентов модифицированной компоновки варианта осуществления исполнительного элемента по фиг.4A, показанные в разное время выполнения операции.
На фиг.6 показан вид сбоку другого варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.7 показан вид сбоку другого варианта осуществления исполнительного элемента, содержащего настоящее изобретение.
На фиг.8 и 9 показан дистальный конец корпуса катетера, соединенный шарниром, в соответствии с вариантом осуществления исполнительного элемента по фиг.7.
На фиг.10 показана система формирования ультразвукового изображения с ручкой, катетером и вариантом осуществления исполнительного элемента по фиг.7.
На фиг.11 и 12 показана компоновка в соответствии с вариантом осуществления управляемого катетера, который включает в себя вариант осуществления исполнительного элемента по фиг.7, для внутрисердечной эхокардиографии в пределах правого предсердия сердца.
На фиг.13 показана компоновка в соответствии с вариантом осуществления по фиг.11 в правом предсердии сердца с вариантом осуществления исполнительного элемента по фиг.7 во втором положении.
На фиг.14 показана компоновка в соответствии с вариантом выполнения по фиг.11 в правом предсердии сердца с вариантом осуществления исполнительного элемента по фиг.7 в третьем положении.
На фиг.15А показан график сигнала привода, используемого для привода в движение элементов с памятью формы, и соответствующего положения нагрузки, которую приводят в движение.
На фиг.15 В показан график другого сигнала привода, используемого для привода в движение элементов с памятью формы, и соответствующего положения нагрузки, которую приводят в движение.
Осуществление изобретения
На фиг.1 показан вариант осуществления исполнительного элемента 10, состоящего из первого элемента 12 с памятью формы и второго элемента 14 с памятью формы, которые активируются для выполнения колебательного, поворотного движения нагрузки 20 вокруг оси AA поворота. В этом отношении, ось AA поворота может быть определена осевым элементом 30, который опирается на каждом конце и вращается относительно корпуса 40. Корпус 40 включает в себя первый концевой элемент 42a, второй концевой элемент 42b и внешний кожух 42 с (который показан прозрачным на фиг.1). В свою очередь, нагрузка 20 может быть установлена с поддержкой на осевом элементе 30 для поворотного движения между ними.
Каждый из первого и второго элементов 12, 14 с памятью формы может содержать отрезок материала с памятью формы (например, нитинола, сплава металлов из никеля и титана), в котором первый и второй элементы 12, 14 с памятью формы могут быть нагреты, по меньшей мере, частично, со смещением по времени, для получения соответствующего преобразования мартенситно-аустенитной фазы и соответствующего уменьшения (например, сокращения) длины каждого элемента. Как будет понятно, такие переменные уменьшения длины приводят к тому, что осевой элемент 30 вращается назад и обеспечивает, таким образом, поворот нагрузки 20 вперед и назад вокруг оси АА в виде колебаний. Такой нагрев может быть достигнут путем подачи электроэнергии к элементам 12, 14 с памятью формы. Приложенная энергия может быть в виде приложенного напряжения, которое инициирует ток в элементах 12, 14 с памятью формы, производящий нагрев. Каждый из первого и второго элементов 12, 14 с памятью формы может содержать отрезок провода с памятью формы или любой другой соответствующий элемент с памятью формы (например, ленту с памятью формы, многоэлементный элемент, такой как провод из множества волокон, обмотка, катушка, спирально намотанная полоса).
Далее будет сделана ссылка на фиг.1, совместно с фиг.2A, 3A и 3B, которые иллюстрируют функциональную связь между первым элементом 12 с памятью формы, вторым элементом 14 с памятью формы и осевым элементом 30. С пояснительной целью нагрузки 20, первый и второй концевые элементы 42a, 42b и внешний кожух 42с не показаны на фиг.2A-3D. В представленном варианте осуществления первый элемент 12 с памятью формы может быть фиксированно соединен на первом конце 12a с опорой 52a. Опора 52a может быть соединена с упруго деформируемым элементом (например, пружинным элементом, таким как упругий, сжимаемый элемент) 53a, который в свою очередь соединен с первым концевым элементом 42a. В этом отношении, в результате сжатия упруго деформируемого элемента 53a, опора 52a выполнена с возможностью
перемещения на ограниченную величину относительно первого концевого элемента 42a. Первый элемент 12 с памятью формы может быть фиксированно соединен на втором конце 12b с опорой 52b (частично видно на фиг.2А). Аналогично, опора 52b может быть соединена с упруго деформируемым элементом 53b, который, в свою очередь, соединен со вторым концевым элементом 42b. Аналогично, второй элемент 14 с памятью формы может быть фиксированно соединен на первом конце 14а с опорой 54а. Опора 54а может быть соединена с упруго деформируемым элементом 55а, который, в свою очередь, соединен с первым концевым элементом 42a. Второй элемент 14 с памятью формы может быть фиксированно соединен на втором конце 14b с опорой 54b (частично видно на фиг.2А). Опора 54b может быть соединена с упруго деформируемым элементом 55b, который, в свою очередь, соединен со вторым концевым элементом 42b.
Упруго деформируемые элементы 53а, 53b, 55а, 55b могут, во время работы, упруго деформироваться (например, упруго сжиматься и разжиматься) таким образом, что компенсируются возможные несоответствия между длинами элементов 12, 14 с памятью формы, поскольку они одновременно изменяют длину (например, один из элементов 12, 14 с памятью формы может сжиматься по длине, в то время как другой удлиняется). В результате сжатия упруго деформируемых элементов 53а, 53b, 55а, 55b можно способствовать предотвращению чрезмерного упругого натяжения элементов 12, 14 с памятью формы. Кроме того, упруго деформируемые элементы 53а, 53b, 55а, 55b могут помогать компенсировать вариации упругого натяжения в результате изменения структуры, по мере того, как элементы 12, 14 с памятью формы поворачиваются при колебательном движении нагрузки 20.
Первый элемент 12 с памятью формы может во время работы быть функционально соединен с осевым элементом 30 через соединительный элемент 32a, фиксированно соединенный с осевым элементом 30 и поперечно продолжающийся от осевого элемента 30 на одной стороне оси АА поворота. Аналогично, второй элемент 14 с памятью формы может быть функционально соединен с осевым элементом 30 через соединительный элемент 32b, фиксированно соединенный с осевым элементом 30 и продолжающийся в поперечном направлении от осевого элемента 30 с другой стороны оси AA поворота. Соединительные элементы 32a, 32b могут быть выполнены с канавкой, с тем, чтобы способствовать точному расположению элементов 12, 14 с памятью формы относительно них. В вариантах осуществления, в случае, когда расстояния между соединительным элементом 32a и опорой 52a, и между соединительным элементом 32a и опорой 52b не равны друг другу, и/или когда расстояния между соединительным элементом 32b и опорой 54a, и между соединительным элементом 32b и опорой 54b не равны друг другу, соответствующая(-ие) канавка(-и) может(-гут) быть выполнена(-ы) для обеспечения возможности скольжения соответствующего элемента(-ов) 12, 14 с памятью формы в ней (них), по мере того, как длина изменяется, и нагрузка 20 выполняет колебательное движение. В вариантах осуществления, когда такие расстояния, по существу, равны, соответствующий элемент 12, 14 с памятью формы может быть зафиксирован в соответствующем соединительном элементе 32a, 32b (например, в средней точке вдоль его соответствующей длины).
Как показано на фиг.3A, первый элемент 12 с памятью формы может быть функционально соединен через соединительный элемент 32a с осевым элементом 30 в местоположении, смещенном от оси AA поворота, для определения первого плеча I1 момента. Аналогично, второй элемент 14 с памятью формы может быть функционально соединен через соединительный элемент 32b с осевым элементом 30 в местоположении, смещенном от оси AA поворота, так, что определяется второе плечо I2 момента. В представленной компоновке плечи I1 и I2 момента, по существу, равны. При этом могут быть воплощены компоновки, в которых плечи I1 и I2 момента не равны друг другу.
На фиг.2A и 3A первый элемент 12 с памятью формы был активирован, например, нагрет, чтобы заставить сокращаться по длине первый элемент 12 с памятью формы и, таким образом, поворачивать первый осевой элемент 30 в направлении (например, по часовой стрелке) на угол y1. Как можно отметить, первый элемент 12 с памятью формы может быть активирован в течение первого периода времени, который, по меньшей мере, частично накладывается на второй период времени, в течение которого активирован второй элемент 14 с памятью формы. В этом отношении при активации первого элемента 12 с памятью формы может прикладываться растягивающее усилие ко второму элементу 14 с памятью формы, с тем, чтобы способствовать возврату элемента 14 с памятью формы в его нерастянутое состояние (например, совместно с его аустенитно-мартенситным преобразованием фазы после активации).
На фиг.3B второй элемент 14 с памятью формы был активирован (например, нагрет), чтобы заставить сокращаться второй элемент 14 с памятью формы по длине и, таким образом, поворачивать осевой элемент 30 во втором направлении (например, против часовой стрелки) на угол y2. В компоновках, в которых второй элемент 14 с памятью формы активируют в, по меньшей мере, частично, смещенном по времени отношении относительно активации первого элемента 12 с памятью формы, активация второго элемента 14 с памятью формы позволяет прикладывать силу растяжения к первому элементу 12 с памятью формы для того, чтобы способствовать возврату элемента 12 с памятью формы в растянутое состояние (например, совместно с преобразованием его аустенитно-мартенситной фазы после активации).
Снова обращаясь к фиг.1 и 2A, участки первого элемента 12 с памятью формы продолжаются от соединительного элемента 32a и нагрузки 20, образуя угол x1 раствора между ними. Аналогично, участки второго элемента 14 с памятью формы продолжаются от соединительного элемента 32b и нагрузки 20 для определения угла x2 раствора между ними. Как можно видеть, угол x1 раствора увеличивается, а угол x2 раствора уменьшается во время активации первого элемента 12 с памятью формы, при этом угол x1 раствора увеличивается, а угол x1 раствора уменьшается во время активации второго элемента 14 с памятью формы. Угловые конфигурации первого элемента 12 с памятью формы и второго элемента 14 с памятью формы, показанные на фиг.1, способствуют поворотному движению нагрузки 20 в относительно большом угловом диапазоне y1+y2 градусов (см. фиг.3A и 3B). В этом отношении, когда длина элементов 12, 14 с памятью формы изменяется приблизительно от 1% до 5% (например, на 4%) и когда углы x1 и x2, находящиеся в нейтральном или "начальном" положении (например, при нагрузке 20 в горизонтальном положении), составляют приблизительно 100-170°, общий угловой диапазона y1+y2 может составлять приблизительно порядка 50-60°. Тот же общий угловой диапазон может быть достигнут в другом варианте осуществления, благодаря тому, что например, углы x1 и х2 делают в начальном положении большими и, соответственно уменьшая вариацию по длине элементов 12, 14 с памятью формы. Такая вариация может привести к большему механическому напряжению, приложенному к элементам 12, 14 с памятью формы. В другой вариации, благодаря тому, что углы x1 и x2 делают в их начальном положении меньшими и, соответственно, увеличивают вариацию по длине элементов 12, 14 с памятью формы, может повыситься степень линейности между изменением по длине элементов 12, 14 с памятью формы и изменением угла нагрузки 20. Местоположение фиксированных концов элементов 12, 14 с памятью формы на первом и втором концевых элементах 42a, 42b относительно места, где элементы 12, 14 с памятью формы входят в контакт с соединительными элементами 32a, 32b, может регулироваться с тем, чтобы, например, обеспечить максимальную силу, приложенную к соединительным элементам 32a, 32b с помощью элементов 2, 14 с памятью формы, на выбранной точке цикла движения нагрузки 20. Местоположение фиксированных концов элементов 12, 14 с памятью формы также может быть выбрано таким образом, что может быть достигнут конкретный общий объем пространства, принимаемого исполнительным элементом 10. Таким образом, для конкретного приложения, исполнительный элемент 10 может быть выполнен так, чтобы достичь определенного размера, в то время как в другой конфигурации, исполнительный элемент может быть выполнен с возможностью достижения определенной линейности, в то время как в другой конфигурации может быть достигнут определенный угловой диапазон y1+у2 градусов. В одном примере исполнительный элемент может быть выполнен таким образом, что он занимает объем пространства, определенного воображаемым цилиндром, сформированным путем поворота нагрузки на 20-360° вокруг оси AA поворота. В таком примере общий диаметр исполнительного элемента 10 может быть определен по размеру нагрузки 20, в отличие от размеров механизмов, используемых для привода нагрузки 20. В этом отношении, размер нагрузки 20 (например, длина, ширина, толщина) может представлять собой фактор при учете конфигурации элементов 12, 14 с памятью формы.
Возвращаясь к варианту осуществления на фиг.1, 2A, 3A и 3B, активация первого элемента 12 с памятью формы может быть реализована путем подачи сигналов энергии к опорам 52a и 52b, которые могут быть электрически соединены с элементом 12 с памятью формы. В этом отношении, опоры 52a и 52b могут использоваться, как соединительные блоки, которые способствуют электрическому соединению с элементом 12 с памятью формы. Аналогично, активация второго элемента 14 с памятью формы может быть реализована через подачу сигналов энергии к опорам 54a и 54b, которые могут быть электрически соединены для формирования элемента 14 с памятью формы. Например, опоры 52a, 52b и 54a, 54b могут быть соединены через линии электрического сигнала с источником электроэнергии, содержащим логическую схему, для подачи электрических сигналов на опоры 52a, 52b и 54a, 54b (и, таким образом, в элементы 12, 14 с памятью формы) после смещения моментов времени, в которые такие электрические сигналы могут изменяться по величине, в соответствии с заданным алгоритмом. Такой заданный алгоритм может быть установлен для реализации относительно постоянной угловой скорости нагрузки 20 по мере того, как она отклоняется или вращается вокруг оси AA поворота в колебательном режиме. В качестве альтернативы, заданный алгоритм может быть установлен, для реализации других из требубемых профилей движения для нагрузки 20. Действительно, путем изменения алгоритмов, используемых для привода элементов с памятью формы, профиль движения любого из вариантов осуществления, описанных здесь, может быть отрегулирован в соответствии с пожеланиями.
Магниты могут использоваться при различных обстоятельствах для управления движением нагрузки 20. Например, как показано на фиг.3C, магнит 62 может быть расположен на конце траектории движения соединительного элемента 32a или рядом с ним. В такой конфигурации соединительные элементы 32a, 32b могут быть изготовлены из намагничиваемого (например, содержащего железо) материала. В качестве альтернативы, соединительные элементы 32a, 32b могут быть изготовлены из ненамагничиваемого материала, и один или несколько намагничиваемых элементов могут быть фиксированно соединены с соединительными элементами 32a, 32b для обеспечения передачи от магнита 62 и второго магнита 60 магнитной силы к соединительным элементам 32a, 32b. Магнит 62 может прикладывать силу притяжения к соединительному элементу 32a, уменьшая, таким образом, упругое растяжение, необходимое в первом элементе 12 с памятью формы, для достижения положения конца перемещения, показанного на фиг.3C. Такая компоновка также позволяет уменьшить уровень нагрева элемента 12 с памятью формы, необходимого для достижения положения конца перемещения. Второй магнит 60 может быть, соответственно, установлен так, чтобы он имел аналогичное влияние на нагрузку 20 на другом конце траектории движения. В вариации варианта осуществления, представленного на фиг.3C, магнит 62 может быть расположен таким образом, что он входит в непосредственный контакт с соединительным элементом 32a в конце перемещения. Такая конфигурация может использоваться для надежного определения положения нагрузки 20 (то есть, в результате ввода соединительного элемента 32a в контакт с магнитом 62, положение нагрузки 20 становится известным). Кроме того, такая конфигурация может использоваться для обеспечения силы, позволяющей удерживать, или которая помогает удержанию в положении нагрузки 20 в конце перемещения в течение заданной длительности времени. В другом варианте неферритовая прокладка (не показана) может быть установлена на магнит 62 (или, в качестве альтернативы, на соединительный элемент 32a) таким образом, что прокладка используется, как жесткий упор для движения соединительного элемента 32a (обеспечивая, таким образом, положительное определение положения нагрузки 20), но не позволяет магниту 62 входить в непосредственный контакт с соединительным элементом 32a.
В другом примере применения магнитов, показанном на фиг.3D, пара магнитов 66, 70 с одинаковыми полюсами может быть установлена таким образом, что они прикладывают силу отталкивания друг к другу по мере того, как нагрузка 20 приближается к положению конца перемещения, показанному на фиг.3D. Такая конфигурация может способствовать замедлению нагрузки 20 и может, в частности, применяться в вариантах применения с относительно высокой скоростью и/или с большой массой нагрузки, для которых может быть полезным дополнительное замедление. Может использоваться аналогично сконфигурированная пара магнитов 64, 68 с одинаковыми полюсами, установленная так, чтобы они оказывали аналогичный эффект на нагрузку 20 в положении другого конца перемещения.
Описанные выше магниты могут представлять собой постоянные магниты и/или электромагниты. Когда магниты представляют собой электромагниты, ими можно активно управлять, с тем, чтобы обеспечить помощь с требуемым профилем движения. В любом другом варианте осуществления, описанном здесь, могут использоваться магниты, как описано выше, для помощи при управлении движением нагрузки. В вариантах осуществления, в которых используются магниты, различные части, граничащие с магнитами, могут иметь такую форму, чтобы обеспечить определенные рабочие характеристики. Например, соединительные элементы 32a, 32b по фиг.3C могут иметь квадратное поперечное сечение (в отличие от круглого поперечного сечения, показанного на фиг.1) таким образом, что плоская поверхность обращена к магнитам 60, 62.
При альтернативном размещении компонентов, в соответствии с вариантом осуществления по фиг.1, концы элементов 12, 14 с памятью формы могут быть фиксированно соединены с нагрузкой 20, аналогично тому, как концы элементов 12, 14 с памятью формы прикреплены к первому и второму концевым элементам 42a, 42b на фиг.1. В таком варианте осуществления соединительные элементы или эквивалентная структура могут быть неподвижно (относительно внешнего кожуха 42c) расположены снизу (то есть, снизу, в ориентации, показанной на фиг.1) нагрузки 20 таким образом, чтобы первый конец каждого элемента 12, 14 с памятью формы мог быть фиксированно соединен с нагрузкой 20 на одном конце нагрузки 20, а второй конец фиксированно соединен с нагрузкой 20 на другом конце нагрузки 20, при этом центральный участок располагался частично вокруг фиксировано размещенных соединительных элементов или на эквивалентной структуре.
При дополнительном альтернативном размещении компонентов, в соответствии с вариантом осуществления по фиг.1, исполнительный элемент 10 может включать в себя дополнительные элементы с памятью формы для обеспечения избыточности в случае отказа одного или обоих из элементов 12, 14 с памятью формы. Например, дополнительный элемент с памятью формы, аналогично выполненный, как элемент 12 с памятью формы, может быть расположен так, что он, во время работы обеспечивает такое движение нагрузки 20, как и элемент 12 с памятью формы. В этом отношении, дополнительный элемент с памятью формы может быть расположен, в общем, параллельно элементу 12 с памятью формы. В одном варианте осуществления дополнительный элемент с памятью формы может быть активирован совместно с элементом 12 с памятью формы. Другой элемент с памятью формы может быть расположен и/или может быть активирован относительно элемента 14 с памятью формы аналогичным образом. Следовательно, в такой компоновке, если произойдет отказ одного или обоих из элементов 12, 14 с памятью формы, оставшиеся элементы с памятью формы можно использовать для выполнения возвратно-поступательного движения нагрузки 20.
На фиг.2B показан осевой элемент 30 и соединительные элементы 32a, 32b в той же ориентации, что и на фиг.2A. В варианте осуществления по фиг.2 В, элементы 12, 14 с памятью формы и соответствующие упруго деформируемые элементы 53a, 53b, 55a, 55b и опоры 52a, 52b, 54a, 54b по фиг.2A были заменены элементами 16, 18 с памятью формы, намотанными спирально, и опорными элементами 22, 24. Спирально намотанные элементы 16, 18 с памятью формы во время работы обеспечивают более высокий процент уменьшения длины (например, вдоль продольной оси спирально намотанных витков) по сравнению с не намотанными спирально элементами 12, 14 с памятью формы. Таким образом, как показано на фиг.2B, спирально намотанные элементы 16, 18 с памятью формы могут быть расположены, в общем, перпендикулярно концам соединительных элементов 32a, 32b для обеспечения колебательного, поворотного движения осевого элемента 30, аналогично формируемому элементами 12, 14 с памятью формы. Кроме того, спирально намотанные элементы 16, 18 с памятью формы могут во время работы обеспечивать такое движение в пределах аналогичного объема пространства (например, внутри корпуса 40 на фиг.1). Опорные элементы 22, 24 могут включать в себя упруго деформируемые элементы. Кроме того, дополнительные спирально намотанные элементы с памятью формы могут использоваться для получения избыточности, аналогично описанной выше, со ссылкой на дополнительные элементы 12, 14 с памятью формы.
На фиг.4A показан другой вариант осуществления исполнительного элемента 100, содержащего первый элемент 112 с памятью формы и второй элемент 114 с памятью формы, которые могут быть активированы для выполнения колебательных, поворотных движений нагрузки 120 вокруг оси AA поворота. Ось AA поворота может быть определена, как осевой элемент 130, который удерживается на обоих концах и выполнен с возможностью вращения относительно корпуса 140. Корпус 140 включает в себя первую концевую часть 142a, вторую концевую часть 142b и внешний кожух 142c (показанный прозрачным на фиг.4A). Как показано, нагрузка 120 может быть установлена с поддержкой на осевом элементе 130 для поворотного движения вместе с ним.
Каждый из первого и второго элементов 112, 114 с памятью формы может содержать отрезок провода с памятью формы или любой другой соответствующий элемент с памятью формы (например, полоску с памятью формы, многоэлементную деталь, такую как провод из множества нитей, катушку, намотанную спирально полоску) и может быть нагрет, по меньшей мере, частично со смещением по времени для получения соответствующего мартенситно-аустенитного преобразования фазы и соответствующих уменьшений (например, сокращения) длины каждого провода. В свою очередь, такое переменное уменьшение длины приводит к тому, что осевой элемент 130 будет поворачиваться или будет поворачиваться вперед и назад, обеспечивая, таким образом, поворотное движение нагрузки 120 вперед и назад вокруг оси AA поворота с колебаниями.
Как показано на фиг.4A, первый элемент 112 с памятью формы может быть жестко соединен на первом конце 112a с опорой 152a, которая соединена с корпусом 140 через упруго деформируемый элемент 156а, при этом первый элемент 112 с памятью формы может быть фиксированно соединен на втором конце 112b с опорой 152b, которая соединена с корпусом 140 через упруго деформируемый элемент 156b. Каждое из креплений 152a и 152b может быть расположено на общей стороне вертикальной плоскости, имеющей обе оси AA и BB поворота, которые, когда нагрузка 120 находится в "исходном" положении (как показано на фиг.4A), продолжается вдоль соединительного элемента 132, который продолжается вниз от осевого элемента 130 и закреплен на нем (см. фиг.5A). Второй элемент 114 с памятью формы может быть соединен на первом конце 114a с опорой 154a, которая соединена с корпусом 140 через упруго деформируемый элемент 158a, при этом второй элемент 114 с памятью формы может быть фиксированно соединен на втором конце 114b с опорой 154b, которая соединена с корпусом 140 через упруго деформируемый элемент 158b. Каждое из креплений 154a и 154b может быть расположено на общей стороне вертикальной плоскости, определенной осями A-A и B-B, противоположными стороне, на которой расположено каждое из креплений 152a, 152b. В качестве альтернативы, только одиночный упруго деформируемый элемент (например, упруго деформируемые элементы 156a, 158a) может быть соединен с каждым из элементов 112, 114 с памятью формы, или упруго деформируемый элемент может не использоваться.
Как дополнительно показано на фиг.4A, первый элемент 112 с памятью формы и второй элемент 114 с памятью формы расположены так, чтобы они были функционально соединены с осевым элементом 130 через соединение с противоположными сторонами соединительного элемента 132. Более конкретно, первый элемент 112 с памятью формы соединен с боковым соединительным элементом 132, который обращен от стороны соединительного элемента 132, на котором расположены опоры 152a, 152b. И, наоборот, второй элемент 114 с памятью формы соединен с боковой стороной соединительного элемента 132, которая противоположна стороне соединительного элемента 132, соединенной с первым элементом 112 с памятью формы, и которая обращена от стороны соединительного элемента 132, на которой расположены опоры 154a, 154b.
Следует понимать, что, как показано на фиг.4A, первый и второй элементы 112, 114 с памятью формы не имеют такую конфигурацию, в которой они примыкают к соединительному элементу 132 на одинаковом расстоянии от нагрузки 120. Таким образом, первый и второй элементы 112, 114 с памятью формы могут не симметрично воздействовать на соединительный элемент 132. В варианте исполнительного элемента 100 по фиг.4, первый и второй элементы 112, 114 с памятью формы могут быть выполнены таким образом, что каждый из них примыкает к соединительному элементу 132 на равном расстоянии от нагрузки 120. В такой конфигурации симметрия может быть достигнута, например, путем симметричного регулирования положения опор 152a, 152b, 154a, 154b таким образом, что первый и второй элементы 112, 114 с памятью формы не оказывают помеху друг другу во время поворота нагрузки 120.
На фиг.4B показан модифицированный вариант осуществления исполнительного элемента 100, показанного в варианте осуществления на фиг.4A. Что касается варианта осуществления на фиг.4A, было отмечено, что первый и второй элементы 112, 114 с памятью формы могут содержать отрезки провода с памятью формы. На фиг.4A представлены физически разделенные первый и второй элементы 112, 114 с памятью формы. В варианте осуществления на фиг.4В первый и второй элементы 112′, 114′ с памятью формы могут быть определены отдельными участками или отрезками непрерывного провода 113 с памятью формы. В качестве примера провод 113 из сплава с памятью формы может быть обжат на первом конце 113a обжимной опоры 153a и может быть обжат на втором конце 113b обжимной опоры 153b. Кроме того, провод 113 из сплава с памятью формы может быть обжат на обжимной опоре 153c для определения участка провода, соответствующего первому элементу 112′ с памятью формы (то есть, между обжимными опорами 153a и 153c) и может быть обжат на обжимной опоре 153d для формирования второго элемента 114′ с памятью формы (то есть, между обжимными опорами 153b и 153d). При такой компоновке провод 113 из сплава с памятью формы может быть электрически соединен с общим электрическим заземлением 155 (например, между обжимными опорами 153c и 153d). Как показано, первый конец 113а провода 113 из сплава с памятью формы может быть электрически соединен с первым источником VA сигнала электрического привода, а второй конец 113b может быть электрически соединен со вторым источником VB сигнала электрического привода. Первый и второй источники VA, VB электрических сигналов электрического привода могут, в качестве альтернативы, работать для активации первого и второго элементов 112′, 114′ с памятью формы, соответственно.
На фиг.4С показана модифицированная версия варианта осуществления по фиг.4B. Как показано, провод 113 из сплава с памятью формы может быть обжат на одной обжимной опоре 153c. В такой компоновке первый элемент 112" с памятью формы и второй элемент 114" с памятью формы могут образовывать V-образную конфигурацию между первой концевой частью 142a и соединительным элементом 132. Обжимная опора 153с может быть электрически соединена с общим электрическим заземлением 155.
Каждый из первого и второго элементов 112, 114 с памятью формы по фиг.4A, первого и второго элементов 112′, 114′ с памятью формы по фиг.4B и первого и второго элементов 112", 114" с памятью формы по фиг.4C, может быть выполнен в виде отрезка провода с памятью формы. В одном подходе такие отрезки провода с памятью формы могут содержать физически отдельные первый и второй провода (например, первый и второй элементы 112, 114 с памятью формы). В другом подходе такие отрезки провода с памятью формы могут быть определены разными участками непрерывного провода с памятью формы (например, первым и вторым элементами 112′, 114′ с памятью формы и первым и вторым элементами 112", 114" с памятью формы).
Ссылка теперь будет сделана на фиг.5A, 5 В и 5С, на которых показаны функциональные связи между первым элементом 112 с памятью формы и осевым элементом 130 через соединительный элемент 132, и между вторым элементом 114 с памятью формы и осевым элементом 130 через соединительный элемент 132. На фиг.5A исполнительный элемент 100 показан в "исходном" положении, например, для активации с элементами 112, 114 с памятью формы, каждый из которых находится в мартенситном состоянии и с нагрузкой 120, расположенной в положении, которое, по существу, находится в центре между двумя крайними положениями диапазонов колебательного движения нагрузки 120. На фиг.5В первый элемент 112 с памятью формы был активирован, например, нагрет, так, что это приводит к сокращению первого элемента 112 с памятью формы по длине и, таким образом, к повороту соединительного элемента 132, осевого элемента 130 и нагрузки 120 в первом направлении (например, по часовой стрелке) на угол z1. Как отмечено выше, первый элемент 112 с памятью формы может быть активирован во время первого периода времени, который, по меньшей мере, частично не наложен на второй период времени, в течение которого активируется второй элемент 114 с памятью формы. В этом отношении, активация первого элемента 112 с памятью формы может осуществляться так, чтобы прикладывать силу растяжения ко второму элементу 114 с памятью формы, для растяжения второго элемента 114 с памятью формы (например, совместно с преобразованием аустенитно-мартенситной фазы после активации).
На фиг.5C второй элемент 114 с памятью формы был активирован (например, нагрет) так, что это привело к сокращению второго элемента 114 с памятью формы по длине и, таким образом, повороту соединительного элемента 132, осевого элемента 130 и нагрузки 120 во втором направлении (например, против часовой стрелки) на угол z2. В компоновках, в которых второй элемент 114 с памятью формы активируют, по меньшей мере, с частичным смещением во времени относительно активации первого элемента 112 с памятью формы, активация второго элемента 114 с памятью формы может выполнять функцию приложения силы растяжения к первому элементу 112 с памятью формы для удлинения первого элемента 112 с памятью формы (например, совместно с аустенитно-мартенситным преобразованием фазы после активации).
На фиг.5AA, 5BB и 5CC показана модифицированная компоновка в варианте осуществления, показанном на фиг.4А, при соответствующей ссылке на виды, показанные на фиг.5A, 5B и 5C. Как показано, в соединительном элементе 132 предусмотрены отверстия 132a, 132b для установки через них первого и второго элементов 112, 114 с памятью формы, соответственно.
На фиг.6 показаны другие варианты осуществления исполнительного элемента 200, содержащего первый элемент 212 с памятью формы и второй элемент 214 с памятью формы, которые могут быть активированы для выполнения колебательного поворотного движения нагрузки 220 вокруг оси AA поворота. Ось AA поворота может быть определена осевым элементом 230, который закреплен на каждом из концов и выполнен с возможностью поворота относительно корпуса 240. Корпус 240 включает в себя первую концевую часть 240a, вторую концевую часть 240b, и внешний кожух 240c (показан прозрачным на фиг.6).
Как показано, нагрузка 220 может быть установлена с поддержкой на осевом элементе 230 для поворотного движения вместе с ним. Каждый из первого и второго элементов 212, 214 с памятью формы может содержать отрезок провода с памятью формы и может нагреваться, по меньшей мере, частично со смещением по времени для получения соответствующих преобразований мартенситно-аустенитной фазы и соответствующих уменьшений (например, сокращения) длины каждого провода. В свою очередь, такие чередующиеся уменьшения длины приводят к тому, что осевой элемент 230 будет поворачиваться вперед и назад, в результате чего, обеспечивается поворот нагрузки 220 назад и вперед вокруг оси AA поворота с колебаниями. Как показано, первый элемент 212 с памятью формы может быть фиксированно соединен на первом конце с опорой 252a, соединенной с корпусом 240 через упруго деформируемый элемент 253a, при этом первый элемент 212 с памятью формы может быть фиксированно соединен со вторым концом опоры 252b, которая соединена с нижней поверхностью нагрузки 220. Аналогично, второй элемент 214 с памятью формы может быть фиксированно соединен на первом конце с опорой 254a, которая соединена с корпусом 240 через упруго деформируемый элемент 255a, при этом второй элемент 214 с памятью формы может быть фиксированно соединен на втором конце с опорой 254b, которая фиксированно соединена с нижней поверхностью нагрузки 240. В качестве альтернативы, опора 252b может быть фиксированно соединена с упруго деформируемым элементом (не показан), который, в свою очередь, соединен с нагрузкой 220, при этом опора 254b может быть фиксированно соединена с другим упруго деформируемым элементом (не показан), который в свою очередь, соединен с нагрузкой 220. В таком альтернативном варианте осуществления упруго деформируемые элементы 253a, 253b являются не обязательными.
Опоры 252a и 254a могут быть расположены на противоположных концах корпуса 240 и на противоположных сторонах плоскости, которая включает в себя ось AA поворота, и расположены перпендикулярно плоскости нагрузки 220, когда нагрузка находится в "исходном" положении, например, перед активацией с помощью элементов 212, 214 с памятью формы. Кроме того, опоры 252b и 254b могут быть расположены в местоположениях со смещением относительно плоскости, когда нагрузка находится в "исходном" положении. В варианте осуществления опора 252a и опора 252b могут быть расположены на противоположных сторонах плоскости, когда нагрузка находится в "исходном" положении, причем опора 254a и опора 254b могут быть расположены на противоположных сторонах плоскости, когда нагрузка находится в "исходном" положении. В этом отношении, когда нагрузка находится в "исходном" положении, каждый из элементов 212, 214 с памятью формы может пересекать плоскость, поскольку она продолжается от их соответствующих опор 252a, 254a на оболочке 240 до ее соответствующих опор 252b, 254b на нагрузке 220.
На фиг.6 первый элемент 212 с памятью формы был активирован так, что он обеспечивает вращение элемента 230 вала и нагрузки 220 для поворота в направлении по часовой стрелке (если смотреть с правой стороны от исполнительного элемента 200, как показано на фиг.6). Как можно видеть, после активации второго элемента 214 с памятью формы и деактивации первого элемента 212 с памятью формы осевой элемент 230 может поворачиваться, и нагрузка 220 может отклоняться вторым элементом 214 с памятью формы в направлении против часовой стрелки.
На фиг.7 показан исполнительный элемент 300, аналогичный показанному в варианте осуществления на фиг.1, выполненный с возможностью использования в катетерах для формирования изображения. Более конкретно, на фиг.7 показан исполнительный элемент 300, содержащий первый элемент 312 с памятью формы, и второй элемент 314 с памятью формы, активируемые для выполнения колебательного поворотного движения нагрузки 320 вокруг оси АА поворота. Ось АА поворота показана на фиг.7 так, что она совпадает с центральной продольной осью исполнительного элемента 300. В качестве альтернативы, в варианте осуществления, ось АА поворота может быть смещена от центральной продольной оси исполнительного элемента 300. Нагрузка 320 содержит три участка, первый концевой блок 320a, второй концевой блок 320b и активный блок 320c, жестко соединенный с концевыми блоками 320a, 320b и расположенный между ними. Активный блок 320c может быть выполнен в виде массива ультразвуковых преобразователей. Ось AA поворота может быть определена коллинеарными осевыми элементами 330a, 330b, которые закреплены и вращаются относительно корпуса 340. В свою очередь, нагрузка 320 может быть установлена с поддержкой на осевых элементах 330a, 330b для поворотного движения вместе с ними. Корпус 340 включает в себя первый концевой элемент 342a, второй концевой элемент 342b и внешний кожух 342c (показанный в прозрачном виде на фиг.7). Корпус 340 дополнительно включает в себя концевой колпачок 340d, который может быть закруглен, что способствует передвижению внутри тела. Первый концевой элемент 342a и второй концевой элемент 342b и, поэтому, ось AA поворота могут быть зафиксированы относительно корпуса 340.
В случае, когда активный блок 320c представляет собой массив ультразвукового преобразователя, массив ультразвукового преобразователя может во время работы передавать акустические сигналы, которые могут использоваться для генерирования изображения в двухмерной плоскости, продолжающейся от размера в длину массива ультразвукового преобразователя. Выполняя колебательное движение массива ультразвукового преобразователя, используя элементы 312, 314 с памятью формы, двумерная плоскость формирования изображения для массива ультразвукового преобразователя может качаться в трехмерном объеме, обеспечивая, таким образом, возможность формирования трехмерных изображений. Такие трехмерные изображения могут представлять собой изображения в режиме реального времени (4D).
Первый и второй элементы 312, 314 с памятью формы могут быть выполнены аналогично первому и второму элементам 12, 14 с памятью формы по фиг.1. Как можно видеть, поочередные уменьшения длины первого и второго элементов 312, 314 с памятью формы приводят к повороту нагрузки 320 вперед и назад вокруг оси AA поворота в колебательном режиме.
Первый элемент 312 с памятью формы может быть фиксированно соединен с первым концом опоры 352a. Опора 352a может быть соединена с упруго деформируемым элементом 353a, который, в свою очередь, соединен с первым концевым элементом 342a.
Первый элемент 312 с памятью формы может быть фиксированно соединен со вторым концом опоры 352b. Аналогично, опора 352b может быть соединена с упруго деформируемым элементом 353b, который, в свою очередь, соединен со вторым концевым элементом 342b. Таким образом, первый элемент 312 с памятью формы может быть выполнен аналогично первому элементу 12 с памятью формы по фиг.1. Аналогично, второй элемент 314 с памятью формы может быть выполнен аналогично второму элементу 14 с памятью формы по фиг.1.
Первый элемент 312 с памятью формы может быть функционально соединен с нагрузкой 320 через поперечную ось 332. Поперечная ось 332, в свою очередь, может быть фиксированно соединена с держателем 333 поперечной оси, который может быть фиксированно соединен с нагрузкой 320. Поперечная ось 332 может быть расположена в ориентации и в положении, аналогичном соединительным элементам 32a, 32b по фиг.1.
Первый и второй элементы 312, 314 с памятью формы могут быть расположены вдоль поперечной оси 332, аналогично тому, как первый и второй элементы 12, 14 с памятью формы на фиг.1 сопрягаются с соединительными элементами 32a, 32b. В этом отношении, колебательные движения нагрузки 320 в результате активации первого и второго элементов 312, 314 с памятью формы могут быть обеспечены аналогично описанному со ссылкой на фиг.1.
Электрический соединительный элемент 360 может быть электрически соединен с активным блоком 320c. Например, электрический соединительный элемент 360 может представлять собой элемент с множеством проводников, которые обеспечивают электрическое соединение с активным блоком 320с. Электрический соединительный элемент 360 может быть направлен через второй концевой элемент 342b, между поперечной осью 332 и активным блоком 320c до конца активного блока 320c, рядом с первым концевым элементом 342a. В этом отношении, участок электрического соединительного элемента 360, расположенный между вторым концевым элементом 342b и поперечной осью 332, может во время работы изгибаться при поддержании электрического соединения с активным блоком 320c. В качестве примера электрический соединительный элемент 360 может содержать гибкую печатную плату (гибкий/изгибаемый электрический элемент или множество элементов). В варианте осуществления гибкая печатная плата может быть расположена в петле обслуживания или в виде компоновки часовой пружины. Такая компоновка в виде часовой пружины может быть расположена внутри исполнительного элемента 300. Например, компоновка в виде часовой пружины может содержаться внутри концевого элемента 362.
Концевой элемент 362 может быть соединен с исполнительным элементом 300 на конце, противоположном концевой крышке 340d. Концевой элемент 362 может обеспечивать структуру, которая выполнена с возможностью ее сопряжения с внешними компонентами, такими как компоненты корпуса катетера, для обеспечения соединения исполнительного элемента 300 с другими структурами, такими как корпус катетера. Концевой элемент 362 также может использоваться для герметизации исполнительного элемента 300 таким образом, чтобы замкнутый объем был определен концевым элементом 362, концевой крышкой 340d и внешним кожухом 342c.
Исполнительный элемент 300 может быть соединен с дистальным концом корпуса катетера таким образом, что исполнительный элемент 300 будет зафиксирован относительно дистального конца корпуса катетера. В другой компоновке исполнительный элемент 300 может быть соединен с дистальным концом корпуса катетера таким образом, что исполнительный элемент может быть установлен с возможностью поворота относительно дистального конца корпуса катетера. Например, исполнительный элемент 300 может быть соединен с элементом привода, который продолжается вдоль длины корпуса катетера от его дистального конца до проксимального конца, в котором поворот проксимального конца элемента привода обеспечивает поворот исполнительного элемента 300 (например, поворот вокруг оси, соответствующей продольной или центральной оси корпуса катетера на его дистальном конце).
В качестве альтернативы, и как показано на фиг.7, исполнительный элемент 300 может быть соединен с шарниром 370. Шарнир 370, в свою очередь, может быть соединен с дистальным концом корпуса катетера таким образом, что участок шарнира 370 будет фиксирован относительно дистального конца корпуса катетера. Шарнир 370 может включать в себя участок 372 границы перехода катетера, который во время работы соединяется с корпусом катетера, участок границы перехода исполнительного элемента, который во время работы соединяется с исполнительным элементом 300, и изгибающийся участок 376, который во время работы обеспечивает возможность относительного углового движения между участком 374 границы перехода исполнительного элемента и изгибающимся участком 376, обеспечивая, таким образом, возможность относительного углового движения между исполнительным элементом 300 и дистальным концом корпуса катетера. В этом отношении, исполнительный элемент 300 может быть избирательно установлен в диапазоне углов относительно корпуса катетера (например, относительно продольной или центральной оси корпуса катетера на его дистальном конце). Как отмечено, концевой элемент 362 также может использоваться для герметизации исполнительного элемента 300 или, в качестве альтернативы, и как показано на фиг.7, концевой элемент 362 и участок границы перехода исполнительного элемента могут использоваться вместе, для герметизации исполнительного элемента 300. Участок 372 границы перехода катетера может включать в себя центральную полость 378, которая может выравниваться с полостью в катетере.
В случае, когда активный блок 320c выполнен в виде массива ультразвуковых преобразователей, массив ультразвуковых преобразователей может включать в себя среду акустического согласования, которая прикреплена к активной стороне массива ультразвукового преобразователя. Среда акустического согласования может содержать гидрогель, который выполнен с возможностью поглощения жидкости. В качестве примера такая среда акустического согласования может быть предусмотрена для акустического согласования с активной стороной кромки массива ультразвуковых преобразователей.
Корпусы 40 (фиг.1), 140 (фиг.4), 240 (фиг.6) и 340 (фиг.7) могут определять замкнутые объемы. Замкнутые объемы могут содержать внутри текучую среду. Текучая среда может представлять собой жидкость. В этом отношении, нагрузки и первый и второй элементы с памятью формы могут быть погружены в текучую среду в замкнутом объеме. Что касается исполнительного элемента 300 по фиг.7, где активный блок 320c выполнен в виде массива ультразвуковых преобразователей, текучая среда может использоваться для акустического согласования массива ультразвуковых преобразователей с внешним кожухом 342c. В этом отношении, материал внешнего кожуха 342с может быть выбран так, чтобы он соответствовал (например, близко сочетался) акустическому импедансу и/или акустической скорости текучей среды тела пациента в области, где исполнительный элемент 300 должен быть расположен во время формирования изображения. Один или несколько портов и/или клапанов могут быть предусмотрены для того, чтобы способствовать размещению текучей среды внутри исполнительных элементов. В случае, когда текучая среда представляет собой жидкость, множество портов и или клапанов можно использовать для того, чтобы дополнительного способствовать удалению пузырьков из замкнутых объемов.
В качестве альтернативы, исполнительные элементы могут не включать в себя замкнутый объем, как описано выше, и внутреннее пространство исполнительных элементов может быть открыто для окружающей среды. Например, корпус 340 исполнительного элемента 300 может включать в себя отверстия или открытые участки (не показаны), которые позволяют текучей среде протекать между внутренним пространством исполнительного элемента 300 и окружающей средой. В этом отношении, текучая среда из тела пациента в области, где должен быть установлен исполнительный элемент 300 во время формирования изображения (например, кровь, когда формируют изображения сердца), может протекать внутрь исполнительного элемента 300.
В другой альтернативе участок исполнительных элементов может быть расположен внутри замкнутого объема, в то время как, по меньшей мере, участок нагрузки открыт для окружающей среды. Например, нагрузка 320 исполнительного элемента 300 может быть герметично соединена вокруг периферии нагрузки 320 с корпусом 340 (например, используя гибкие сильфоны), в которой могут быть определены герметично закрытый нижний участок и верхний участок. Нижний участок может включать в себя текучую среду и элементы 212, 214 с памятью формы. Верхний участок корпуса 340 может включать в себя отверстия, через которые сторона активного блока 320 с (например, массива ультразвукового преобразователя) может быть открыта в окружающую среду (например, кровь при применении для формирования изображения сердца).
Элементы с памятью формы, описанные здесь, могут включать в себя один или несколько слоев материала, обернутого вокруг сердечника, который включает в себя провод с памятью формы. Такие слои могут действовать, как теплоизолирующие слои, изолирующие электричество слои, или в комбинации, как термо- и электроизолирующие слои. Например, элементы 312, 314 с памятью формы могут включать в себя внутренний сердечник, содержащий провод с памятью формы и теплоизолирующий слой из PTFE. Другие примерные материалы, которые можно использовать для изоляции, включают в себя ePTFE, и высокопрочный с повышенной жесткостью фторполимер (HSTF). Некоторые теплоизолирующие слои могут быть микропористыми. Микропористые теплоизолирующие слои захватывают воздух, который предпочтительно способствует повышению теплового сопротивления. Однако некоторые микропористые теплоизолирующие материалы могут пропитываться кровью и другими текучими средами тела, что может, в общем, уменьшить их тепловое сопротивление. Гидрофобные материалы могут использоваться в микропористых теплоизолирующих слоях для уменьшения и/или предотвращения такого смачивания. Гидрофобные материалы, такие как фторполимеры, могут использоваться с этой целью. В качестве альтернативы, негидрофобные материалы могут быть обработаны с использованием гидрофобной и/или олеофобной обработки, для придания им свойств, соответствующих для этого назначения. Предпочтительные теплоизолирующие материалы могут иметь поверхностную энергию меньше чем 50 дин/см2. Другие могут иметь поверхностную энергию меньше чем 40 дин/см2. Также другие могут иметь поверхностную энергию меньше чем приблизительно 30 дин/см2.
Теплоизолирующий слой может использоваться для изоляции провода с памятью формы таким образом, чтобы степень рассеяния тепла от провода с памятью формы можно было бы предпочтительно выбирать. Например, путем выбора заданной толщины теплоизолирующего слоя для достижения заданного уровня изоляции, тепловым потоком от провода с памятью формы в окружающую среду (например, текучую среду), в то время как провод с памятью формы нагревают, можно предпочтительно управлять, для достижения требуемого времени отклика и/или уровня передачи тепла. Таким образом, путем добавления изоляции к проводу с памятью формы, количество тепла, потерянного в окружающей среде во время нагрева провода с памятью формы может быть уменьшено (относительно конфигурации без изоляции), уменьшая, таким образом, время и/или энергию, необходимую для нагрева провода с памятью формы, для получения требуемого изменения длины. Кроме того, путем уменьшения энергии, необходимой для получения требуемого изменения длины, общая передача тепла в окружающую среду может быть уменьшена (снова, относительно конфигурации без изоляции). В вариантах применения, таких как катетеры, такое уменьшение энергии и соответствующее уменьшение тепла, передаваемого в окружающую среду (например, в тело пациента), может обеспечить возможность поддержания катетера в пределах приемлемой предельной температуры (например, ниже определенного регулируемого порогового значения, которое может быть определено, например, администрацией по контролю за продуктами питания и лекарствами США и/или Международным стандартом IEC60601 Электротехнической комиссии) во время работы исполнительного элемента 300. В примерном варианте осуществления теплоизолирующий слой может иметь теплопроводность от приблизительно 0,03 Вт/(м·К) и до 0,20 Вт/мК, при измерении при температуре приблизительно 25°C. В другом примерном варианте осуществления теплоизолирующий слой может иметь теплопроводность от приблизительно 0,05 Вт/(м·К) и до 0,08 Вт/(м·К) при измерении при температуре приблизительно 25°C.
Тепло- и/или электроизолирующие слои, описанные выше, могут обеспечивать приемлемое сопротивление напряжению и/или уровень гидрофобности, или описанные здесь элементы с памятью формы, могут включать в себя дополнительный слой из материала, расположенного снаружи от теплоизолирующего слоя для обеспечения требуемых характеристик. Дополнительный слой может, например, увеличивать максимально допустимое напряжение элементов с памятью формы так, чтобы они имели общее выдерживаемое диэлектриком напряжение, по меньшей мере, приблизительно 500 кВ/м. Дополнительные слои могут, например, содержать гидрофобный материал. Такие дополнительные слои гидрофобного материала могут иметь поверхностную энергию меньше, чем приблизительно 50 дин/см2. Другие могут иметь поверхностную энергию меньше чем 40 дин/см2. Также другие могут иметь поверхностную энергию меньше чем приблизительно 30 дин/см2. Гидрофобный материал может, например, включать в себя ePTFE.
Гидрофобные материалы могут быть предпочтительными, поскольку дополнительный слой в них может действовать, как барьерный слой, который обеспечивает поддержание расположенных ниже слоев относительно свободными от жидкости и, таким образом, может поддерживать их изолирующие свойства. В случае, когда гидрофобные материалы используются, как один слой, их использование может быть предпочтительным в том, что они не поглощают жидкость в известной степени, при которой их удельная теплопроводность могла бы существенно измениться. Другие материалы, которые обеспечивают те же самые преимущества (например, которые способны действовать, как барьер и/или позволяют поддерживать изолирующие свойства, будучи погруженными в жидкость), могут использоваться, как такие гидрофобные материалы. Тепло- и/иди электроизолирующие слои также могут обеспечивать смазочную и/или низкого трения границу перехода, для того, чтобы способствовать плавному движению по и/или вокруг других компонентов в исполнительном элементе во время движения.
Что касается описанных выше слоев, расположенных вокруг элементов с памятью формы, первый этап при определении конфигурации слоев может состоять в выборе требуемой постоянной времени для системы с последующим выбором конкретных материалов, для достижения этой постоянной времени. Например, постоянная времени может быть выбрана таким образом, чтобы охлаждение элементов с памятью формы было как можно более медленным, в то время как все еще обеспечивалась бы требуемая скорость поворота нагрузки. Таким образом, рассеяние энергии может быть минимизировано. Аналогично, определенное рассеяние энергии может быть выбрано с тем, чтобы обеспечить возможность конкретного варианта применения, и затем соответствующая постоянная времени может быть выбрана, для обеспечения максимальной скорости поворота нагрузки для конкретного варианта применения на основе допустимого рассеяния энергии.
Использование элементов с памятью формы для получения колебательного движения нагрузки, как показано на фиг.1-7, может быть предпочтительным в том, что такие системы могут быть относительно малыми. Например, исполнительный элемент 300 может включать в себя массив ультразвуковых преобразователей (например, активный блок 320 с), который может поворачиваться в колебательном режиме, для генерирования 3D изображения в режиме реального времени (4D изображения), имея внешний диаметр 12 фр или меньше (например, 10 фр). Провод с памятью формы, используемый в элементах с памятью формы, может иметь диаметр приблизительно 1 мил. В варианте осуществления по фиг.7, рычаги I1 и I2 момента могут иметь размер приблизительно 1,0 мм.
Исполнительные элементы, описанные здесь, могут дополнительно включать в себя кодер и/или детектор положения (например, для детектирования нагрузки на конце перемещения и/или в "исходном" положении), которое позволяет обеспечить обратную связь в отношении положения нагрузки, привод которой осуществляется. Такие кодеры и/или детекторы положения могут обеспечить возможность построения систем сервоуправления, которые управляют положением активируемой нагрузки.
Исполнительные элементы, описанные здесь, выполнены с возможностью генерирования колебательного движения нагрузок с частотой вплоть до 50 Гц и выше. Например, исполнительные элементы можно использовать для генерирования колебательного движения нагрузок в диапазонах 1-50 Гц или 8-30 Гц. Такое движение может быть сравнительно устойчивым, чтобы, например, выполнять движение нагрузки в форме ультразвукового преобразователя, с тем, чтобы способствовать формированию 4D изображения. Исполнительные элементы, описанные здесь, также могут использоваться для относительно быстрого движения нагрузки (например, с частотой 50 Гц), с тем, чтобы способствовать съемке 3D изображения во время одного поворота ультразвукового преобразователя в одном направлении. Изображение, снятое во время одного такого поворота, может обеспечивать более резкий "снимок" объема, представляющего интерес, чем у изображения, снятого во время относительно медленного движения нагрузки. Такие "снимки" могут быть полезными при формировании изображения движущихся объектов, таких как участки сердца.
На фиг.8 и 9 показан дистальный конец узла 400 катетера, который включает в себя удлиненный корпус 402 катетера, соединенный шарниром 370 с исполнительным элементом 300. На фиг.8 показан исполнительный элемент 300, который представляет собой дистальный концевой элемент узла 400 катетера в положении, в котором он выровнен с дистальным концом корпуса 402 катетера. На фиг.9 показан исполнительный элемент 300 в положении, где он развернут под углом приблизительно +90°, обращенным вперед относительно конца корпуса 402 катетера. Только с целью пояснения, угловое значение (например, угол +90° смещения, показанный на фиг.9), может использоваться здесь для описания величины углового отклонения исполнительного элемента 300 по отношению к центральной оси корпуса 402 катетера от положения, в котором исполнительный элемент 300 и корпус 402 катетера выровнены. Положительное значение будет использоваться для описания углового отклонения, в случае, когда исполнительный элемент 300 перемещается так, что он, по меньшей мере, частично обращен вперед (например, активный блок 320c в "исходном" положении обращен вперед), и отрицательное значение, в общем, используется для описания углового отклонения, когда исполнительный элемент 300 перемещается так, что он, по меньшей мере, частично обращен назад.
Для изменения положения исполнительного элемента 300 от положения на фиг.8 в положение на фиг.9, внутренняя трубка 404 корпуса 402 катетера может перемещаться относительно внешней трубки 406 корпуса 402 катетера. В результате привязки исполнительного элемента 300 к внешней трубке 406 связкой 408, перемещение может привести к угловому отклонению исполнительного элемента 300 в положительном направлении. Связка 408 может быть закреплена на исполнительном элементе 300 на одном конце и на внешней трубке 406 на другом конце. Связка 408 во время работы предотвращает движение точек опоры связки на некоторое расстояние друг от друга больше, чем длина связки 408. В этом отношении, с помощью связки 408, исполнительный элемент 300 может быть соединен с ограничением с внешней трубкой 406. Аналогично случаю, когда связка 408 имеет адекватную жесткость, сокращение внутренней трубки 404 относительно внешней трубки 406 из положения, показанного на фиг.8, может привести к отклонению исполнительного элемента 300 под углом в отрицательном направлении. Внутренняя трубка 404 может включать в себя сквозной просвет.
Связка 408 может представлять собой отдельное устройство, основная функция которого состоит в том, чтобы управлять изменением углового положения исполнительного элемента 300. В другом варианте осуществления связка 408 может представлять собой печатную плату или другой компонент, содержащий множество проводников, которые, в дополнение к предоставлению функции связки, электрически соединяют компоненты внутри исполнительного элемента 300 с компонентами в корпусе 402 катетера или в другом месте. В другом варианте осуществления связка 408 может представлять собой провод или провода, используемые для электрического соединения одного или нескольких компонентов (например, элементов 312, 314 с памятью формы) внутри исполнительного элемента 300 с компонентами, расположенными вне исполнительного элемента 300.
На фиг.8 и 9 показана конфигурация, в которой шарнир 370 представляет собой гибкий шарнир. Гибкий или пленочный шарнир представляет собой податливый шарнир (гибкий подшипник), изготовленный из гибкого или податливого материала, такого как полимер. В общем, гибкий шарнир соединяет две части вместе, обеспечивая возможность их шарнирного поворота относительно друг друга вдоль линии изгиба шарнира. Гибкие шарниры обычно изготовляют путем инжекционного формования. Для гибких шарниров возможно использовать такие полимеры, как полиэтилены, полипропилены, полиуретаны или полиэфирблокамиды, такие как РЕВАХ®, из-за из устойчивости к усталости.
Применение исполнительного элемента 300 по фиг.7-9, в случае, когда активный блок 320с выполнен в форме массива ультразвуковых преобразователей, будет описано со ссылкой на фиг.10-14.
На фиг.10 показана система 500 формирования ультразвукового изображения, пригодная для формирования трехмерных изображений в режиме реального времени (4D), с ручкой 501 и катетером 400. Катетер 400 включает в себя корпус 402 катетера, соединенный с исполнительным элементом 300 через шарнир 370. Корпус 402 катетера может быть гибким и выполнен с возможностью изгиба для следования контурам сосуда организма, в который его вставляют, или направления его по проволочной направляющей или через проводник для ввода катетера. Корпус 402 катетера может быть управляемым.
Система 500 формирования ультразвукового изображения может дополнительно включать в себя контроллер 505 и ультразвуковую консоль 506. Контроллер 505 во время работы может управлять конфигурацией элементов 312, 314c памятью формы и, таким образом, угловым положением массива ультразвуковых преобразователей (то есть, активным блоком 320c). Ультразвуковая консоль 506 может включать в себя процессор изображений, выполненный с возможностью обработки сигналов из массива ультразвуковых преобразователей, и устройство дисплея, такое как монитор. Различные функции, описанные со ссылкой на контроллер 505 и ультразвуковую консоль 506, могут выполняться одним компонентом или любым соответствующим количеством дискретных компонентов.
Ручка 501 может быть расположена на проксимальном конце 511 катетера 400. Пользователь (например, клинический врач, техник, специалист по инвазивным процедурам) катетера 400 может управлять элементами управления корпуса 402 катетера, изменяя угловое положение исполнительного элемента 300 и используя различные другие функции катетера 400. В этом отношении, ручка 501 включает в себя два ползуна 507а, 507b для управления корпусом 402 катетера. Эти ползуны 507а, 507b могут быть соединены с проводами управления таким образом, что, когда ползуны 507a, 507b перемещают относительно друг друга, участок корпуса 402 катетера может изгибаться управляемым образом. Любой другой соответствующий способ управления проводами управления внутри корпуса 402 катетера может использоваться. Например, ползуны могут быть заменены альтернативными средствами управления, такими как поворотные ручки или кнопки. Может использоваться любое соответствующее количество проводов управления внутри корпуса 402 катетера.
Ручка 501 может дополнительно включать в себя контроллер 508 углового положения. Контроллер 508 углового положения может использоваться для управления угловым положением исполнительного элемента 300 относительно дистального конца 512 корпуса 402 катетера. Представленный контроллер 508 углового положения выполнен в форме вращающегося колеса, когда вращение контроллера 508 углового положения приводит к установке соответствующего углового положения исполнительного элемента 300. Другие конфигурации контроллера 508 углового положения могут быть рассмотрены, включающие в себя, например, ползун, аналогичный ползуну 507а.
Ручка 501 может дополнительно включать в себя кнопку 509 активации исполнительного элемента. Кнопка 509 активации исполнительного элемента может использоваться для активации и/или деактивации колебательного движения массива ультразвуковых преобразователей с исполнительным элементом 300. Ручка 501 может дополнительно включать в себя порт 510 в вариантах осуществления системы 500 формирования ультразвукового изображения, которая включает в себя просвет в корпусе 402 катетера. Порт 510 сообщается с просветом таким образом, что просвет можно использовать для подачи устройства и/или материала.
При использовании пользователь может держать ручку 501 и манипулировать одним или обоими ползунами 507а, 507b для управления корпусом 402 катетера, по мере того, как катетер 400 перемещается в требуемое анатомическое положение. Ручка 501 и ползуны 507а, 507b могут быть выполнены таким образом, что положение ползунов 507а, 507b относительно ручки 501 может поддерживаться, поддерживая, таким образом, или "фиксируя" выбранное положение корпуса 402 катетера. Контроллер 508 углового положения может затем использоваться для изменения углового положения исполнительного элемента 300 на требуемое положение. Ручка 501 и контроллер 508 углового положения могут быть выполнены так, чтобы положение контроллера 508 углового положения относительно ручки 501 можно было поддерживать, поддерживая, таким образом, или "фиксируя" выбранное угловое положение исполнительного элемента 300. В этом отношении, угол исполнительного элемента 300 может быть избирательно повторно установлен, и при этом можно независимо избирательно управлять корпусом 402 катетера. Кроме того, угловое положение исполнительного элемента 300 может быть избирательно фиксировано, и форма корпуса 402 катетера может быть независимо избирательно фиксирована. Такое поддержание положения может быть достигнуто, по меньшей мере, частично, например, благодаря трению, фиксаторам и/или любому другому соответствующему средству. Все элементы управления для управления, изменение углового положения и электродвигатель могут работать независимо и могут управляться пользователем.
Система 500 формирования ультразвукового изображения может использоваться для съемки изображений в трехмерном объеме 514 формирования изображения и/или для съемки 3D изображения в режиме реального времени (4D). Положение исполнительного элемента 300 может быть установлено путем управления корпусом 402 катетера, изменяя угловое положение исполнительного элемента 300, или используя комбинацию управления корпуса катетером 402 и изменяя угловое положение исполнительного элемента 300. Кроме того, в вариантах осуществления с просветом, система 500 формирования ультразвукового изображения может дополнительно использоваться, например, для подачи устройства и/или материалов в выбранную область или выбранные области внутри тела пациента.
Корпус 402 катетера может иметь, по меньшей мере, один электрический провод, который выходит из проксимального конца 511 катетера через порт или другое отверстие в корпусе 402 катетера и электрически соединен с приводом преобразователя и процессором изображений (например, внутри ультразвуковой консоли 506).
Кроме того, в вариантах осуществления с просветом, пользователь может вставлять хирургическое устройство (например, диагностическое устройство и/или терапевтическое устройство) или материал, или может извлекать устройство и/или материал через порт 510. Пользователь затем может подавать хирургическое устройство через корпус 402 катетера, для перемещения хирургического устройства в дистальный конец 512 корпуса 402 катетера. Электрическое соединение между ультразвуковой консолью 506 и исполнительным элементом 300 может направляться через электронный порт 513 устройства и через корпус 402 катетера.
Одна из трудностей, связанная с использованием обычных катетеров ICE, представляет собой необходимость управления катетером во множестве точек внутри сердца для съемки различных планов изображений, необходимых во время процедуры. Катетер 400, который содержит исполнительный элемент 300 с изменяемым угловым положением с колебательным качающимся массивом 320 с ультразвуковых преобразователей в нем, устраняет такие трудности, связанные с использованием обычных катетеров ICE.
На фиг.11 показано размещение катетера 400 для внутрисердечной эхокардиографии в правом предсердии 602 сердца 604. На фиг.12 показано размещение катетера 400 внутри правого предсердия 602 сердца 604 после изменения положения катетера 400 (в результате управления катетером 400), для помещения исполнительного элемента 300, расположенного на дистальном конце катетера 400, в требуемое положение. Клинический врач может устанавливать и затем определять положения катетера 400 внутри сердца 604, фиксируя положения катетера 400 (механизм фиксации на ручке, не показан). В этом отношении, будучи однажды установленным, положение катетера 400 может оставаться, по существу, неизменным, при изменении углового положения исполнительного элемента 300.
Когда исполнительный элемент 300 установлен, как показано на фиг.12, объемное изображение может быть сгенерировано из трехмерного объема 606 первого участка сердца 604. Клинический врач может затем манипулировать ориентацией исполнительного элемента 300, для съемки в определенном требуемом диапазоне объемов формирования изображения. Например, на фиг.13 показан исполнительный элемент 300 с измененным угловым положением на второе положение, для съемки объемного изображения трехмерного объема 608 второго участка сердца 604. На фиг.14 показан исполнительный элемент 300 с измененным положением изображения на третье положение, для съемки объемного изображения трехмерного объема 610 третьего участка сердца 604. Варианты осуществления исполнительного элемента 300, описанные здесь, во время работы, позволяют достичь таких положений и больше в пределах правого предсердия 602 сердца 604, которое может иметь внутрисердечный объем с поперечным размером приблизительно 3 см. Объемные изображения таких трехмерных объемов 606, 608 и 610 могут быть получены, благодаря изменению углового положения исполнительного элемента 300 и выполнения операции исполнительного элемента 300 для генерирования колебательного поворота массива ультразвуковых преобразователей, в то время как дистальный конец катетера 400 остается в положении, показанном на фиг.12.
Медицинские процедуры, которые могут быть выполнены в вариантах осуществления, раскрытых здесь, включают в себя без ограничений прокол перегородки, развертывание септального оклудера, абляцию, интервенцию в митральный клапан и оклузию левого придатка предсердия. Способ формирования изображения правого предсердия с использованием вариантов осуществления может включать в себя перемещение корпуса 400 катетера в правое предсердие, управление дистальным концом 512 корпуса 400 катетера для установки его в требуемое положение, включение исполнительного элемента 300 для генерирования движения массива ультразвуковых преобразователей, расположенного в нем, и при поддержании фиксированного положения корпуса 400 катетера, изменения углового положения исполнительного элемента 300, содержащего массив ультразвуковых преобразователей, вокруг шарнира 370 для съемки, по меньшей мере, одного изображения, по меньшей мере, в одном плане просмотра.
На фиг.15A показан график 700, представляющий сигнал 702 управления, используемый для управления элементами с памятью формы, такими как элементы 312, 314 с памятью формы исполнительного элемента 300, для генерирования колебательного движения нагрузки, такой как нагрузка 320. По горизонтальной оси показано время, и, для сигнала 702 управления, на вертикальной оси показано приложенное напряжение. Например, первый участок 706 сигнала управления может управлять элементом 312 с памятью формы, и второй участок 708 сигнала управления может управлять элементом 314 с памятью формы. Соответствующее положение 704 нагрузки 320 показано в верхней половине графика 700. Для положения 704, на вертикальной оси показано угловое положение нагрузки 320. В схеме привода, показанной на фиг.15А, каждый элемент 312, 314 с памятью формы последовательно управляется без наложения, то есть, осуществляет привод, по существу, только одного из элементов 312, 314 с памятью формы в определенный момент времени, и по существу, всегда обеспечивается управление одним из элементов 312, 314 с памятью формы. Это обеспечивает структуру движений, показанную на графике в положении 704 нагрузки 320, где, по существу, всегда осуществляется привод нагрузки 320 в одну или другую из концевых точек ее колебательного движения.
В исполнительном элементе 300, когда один из элементов 312, 314 с памятью формы (горячий элемент) активирован таким образом, что он, по существу, имеет минимальную функциональную длину, другой элемент 312, 314 с памятью формы (холодный элемент) остается относительно холодным и может выдерживать определенную величину упругого растяжения (например, пружинная нагрузка), благодаря упругому растяжению. Это устраняет ненужные механические напряжения в горячем элементе, поскольку, он обладает относительно малым упругим растяжением. Когда электрический ток, используемый для нагрева горячего элемента, отключают, холодный элемент может перемещать нагрузку 320 в обратном направлении, благодаря сохраненной упругой энергии в холодном элементе. Таким образом, нет необходимости всегда выполнять привод одного из элементов 312, 314 с памятью формы. Такая схема 722 привода показана на графике 720 на фиг.15В. На фиг.15В, как и на фиг.15А, на горизонтальной оси показано время, и, для сигнала 722 управления, на вертикальной оси показано приложенное напряжение, и для положения 724, на вертикальной оси показано угловое положение нагрузки 320. Как показано, может быть вставлен временной интервал 730 между импульсами 726, 728. В течение этого временного интервала движение нагрузки 320 может генерироваться накопленной упругой энергией для получения профиля 724 движения, который очень похож на профиль 704 по фиг.15A. Такое использование "упругого обратного движения" (например, расходование сохраненной упругой энергии) может уменьшить общее потребление энергии исполнительного элемента 300 по сравнению с сигналом 702 управления по фиг.15A. Упруго деформируемые элементы также могут способствовать упругому обратному движению.
В варианте осуществления холодный элемент может быть нагрет таким образом, что он достигает своей температуры начала аустенитного преобразования, в то же время, горячий элемент охлаждается до его температуры начала мартенситного преобразования. Эта процедура помогает предотвратить или ограничить противодействие элементов друг другу во время их работы, что могло бы привести к излишнему упругому натяжению и повышению риска неисправности или уменьшению срока службы, в частности, элементов с памятью формы. В этом отношении, уровень изоляции может быть выбран так, чтобы получить требуемую скорость охлаждения, которая обеспечивает такую балансировку. В случае, когда балансировкой точно управляют, упруго деформируемые элементы могут не потребоваться.
Элементы 312, 314 с памятью формы могут быть выполнены таким образом, что перед подачей энергии в один из элементов 312, 314 с памятью формы, когда они оба находятся в холодном состоянии (например, при комнатной температуре), каждый из элементов 312, 314 с памятью формы может находиться в состоянии упругого растяжения. Это может обеспечить возможность для элементов 312, 314 с памятью формы оставаться в контакте с поперечной осью 332 перед подачей энергии в один из элементов 312, 314 с памятью формы. Кроме того, во время работы, элементами 312, 314 с памятью формы можно управлять таким образом, что каждый из элементов 312, 314 с памятью формы будет, по существу, всегда иметь определенную степень упругого растяжения.
Сигналы управления, используемые для управления элементами 312, 314c с памятью формы, могут обеспечивать возможность работы при относительно низких напряжениях, таких как, например, напряжения ниже 35 В постоянного тока. Такие низкие рабочие напряжения могут быть предпочтительными, поскольку они находятся в приемлемых пределах для устройств, вставляемых в тело пациентов. Исполнительный элемент 300 может работать с приводом на частоте 1 цикл в секунду или выше, и при этом он будет удовлетворять требованиям нормативных документов и/или другим требованиям по уровням напряжения и температуры (например, оставаясь ниже максимальной температуры, находясь внутри тела пациента).
Примеры
Был построен исполнительный элемент с первым и вторым элементами с памятью формы, выполненный с возможностью шарнирного поворота нагрузки. Общие размеры исполнительного элемента составили приблизительно 14 мм в длину и диаметр 3 мм. Внешний кожух был изготовлен из трубки из нержавеющей стали, и концевые элементы каждый был изготовлен из корундовой керамики. Нагрузка представляла собой ультразвуковой преобразователь с 64 пьезокерамическими элементами с композитной акустической подложкой. В центрах концевых участков высверлили отверстия, и они определяли ось поворота для нагрузки. Исполнительные элементы работали, в общем, в угловом диапазоне для нагрузки 44° (±22° из начального положения) и имели максимальный общий угловой диапазон 60°. Первый и второй элементы с памятью формы имели форму нитинолового провода диаметром 0,0015". Сигнал управления представлял собой прямоугольное колебание с частотой 10 Гц приблизительно 4,8 В постоянного напряжения. Исполнительный элемент генерировал колебательное движение нагрузки частотой 10 Гц, что обеспечивало двунаправленную частоту сканирования для массива ультразвуковых преобразователей 20 Гц. Колебательные движения нагрузки с частотой 10 Гц были ограничены аппаратными средствами, которые обеспечивали прямоугольное колебание частотой 10 Гц. В другом примере два исполнительных элемента с памятью формы, первый и второй элементы с памятью формы, были выполнены в форме нитинолового провода диаметром 0,0015" с париленовым покрытием; погруженным в воду. Сигнал управления содержал колебание частотой 6 Гц приблизительно 4,5 В постоянного напряжения. Исполнительный элемент формировал колебательное движение нагрузки с частотой 6 Гц в угловом диапазоне 50° (±25° от исходного положения) в течение 50000 непрерывных, полных качаний. В другом примере двойного исполнительного элемента с памятью формы линейное движение нагрузки 10% достигалось, используя колебания треугольной формы и изоляцию первого и второго элементов с памятью формы. Изоляция представляла собой полимер HSTF ePTFE толщиной 7 микрон, и исполнительный элемент работал с частотой 2,5 Гц в фактическом объеме 1000X.
Представленное выше описание настоящего изобретения предназначено для иллюстрации и описания. Кроме того, описание не предназначено для ограничения изобретения представленной здесь формой. Следовательно, вариации и модификации, соразмерные с описанным выше, и навыки, и знания соответствующего уровня техники находятся в пределах объема настоящего изобретения. Описанные выше варианты осуществления, кроме того, предназначены для пояснения известных режимов осуществления изобретения и для обеспечения для других специалистов в данной области техники возможности использовать изобретение в таких или других вариантах осуществления и с различными требуемыми модификациями, в конкретном варианте (вариантах) применения или использования настоящего изобретения. Предполагается рассматривать приложенную формулу изобретения как включающую в себя альтернативные варианты осуществления в той степени, которая разрешена предшествующим уровнем техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННЫЙ КАТЕТЕР | 2011 |
|
RU2527668C2 |
| УЛУЧШЕННЫЙ КАТЕТЕР | 2011 |
|
RU2526262C2 |
| ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ БЛОКИРОВКУ ШАРНИРА | 2014 |
|
RU2662855C2 |
| ПРИВОДНЫЕ МЕХАНИЗМЫ АВТОРЕГУЛИРОВКИ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2670669C9 |
| Рукоятка управления медицинским устройством | 2012 |
|
RU2617271C2 |
| МЕХАНИЗМЫ БЛОКИРОВКИ ПРИВОДНОЙ СИСТЕМЫ ДЛЯ МОДУЛЬНЫХ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2675960C2 |
| СМЕННЫЕ УЗЛЫ СТЕРЖНЯ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ | 2014 |
|
RU2661139C2 |
| РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКИМ УСТРОЙСТВОМ С НЕЗАВИСИМЫМИ САМОФИКСИРУЮЩИМИСЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ ДЛЯ РЕГУЛИРОВКИ С ПОМОЩЬЮ ВЫТЯЖНОЙ ПРОВОЛОКИ | 2012 |
|
RU2623131C2 |
| ШАРНИРНО ПОВОРАЧИВАЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПУСКОВОЙ ПРИВОД | 2014 |
|
RU2664172C2 |
| САМОФИКСИРУЮЩАЯСЯ РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКОГО УСТРОЙСТВА С МЕХАНИЗМОМ СЦЕПЛЕНИЯ С КУЛАЧКОВЫМ ПРИВОДОМ | 2012 |
|
RU2608440C2 |


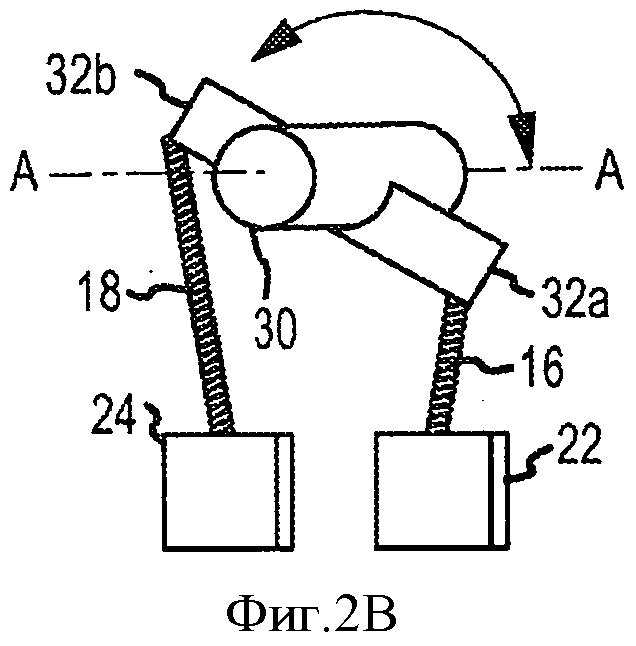


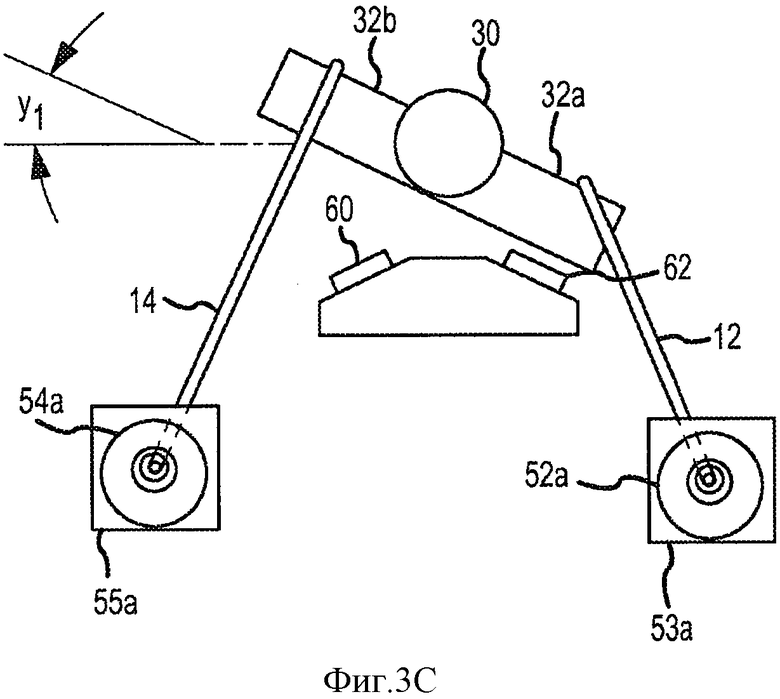




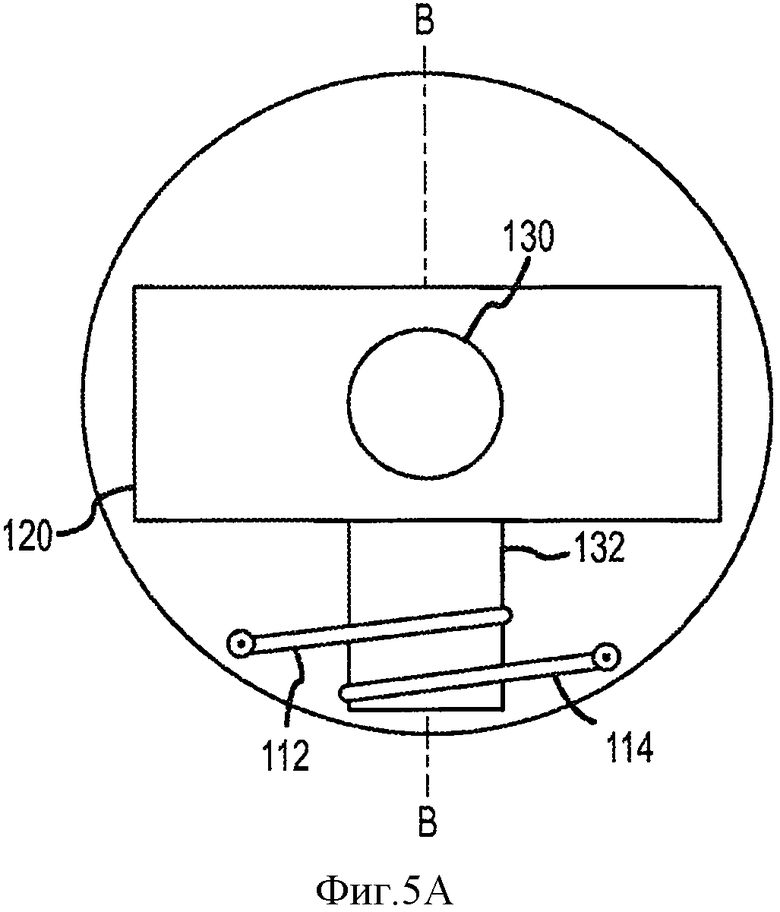

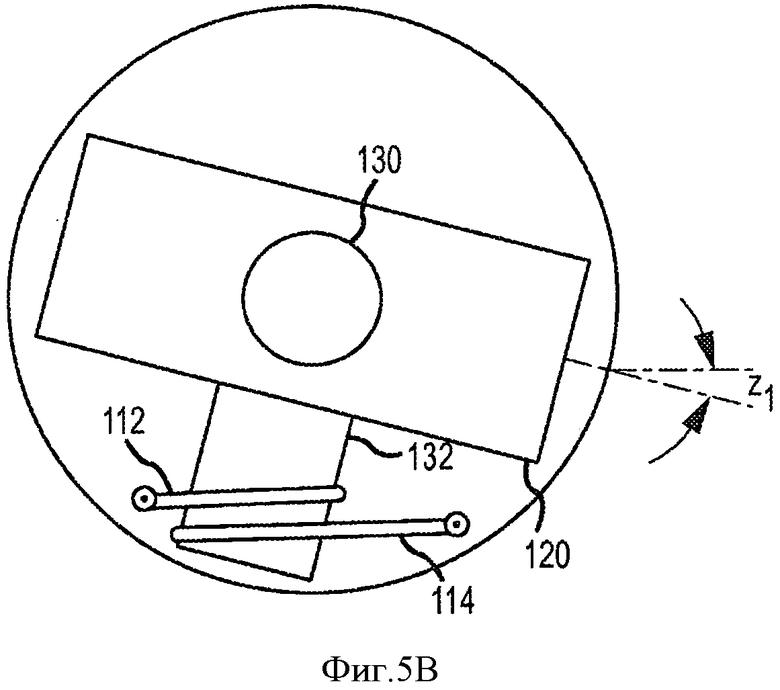

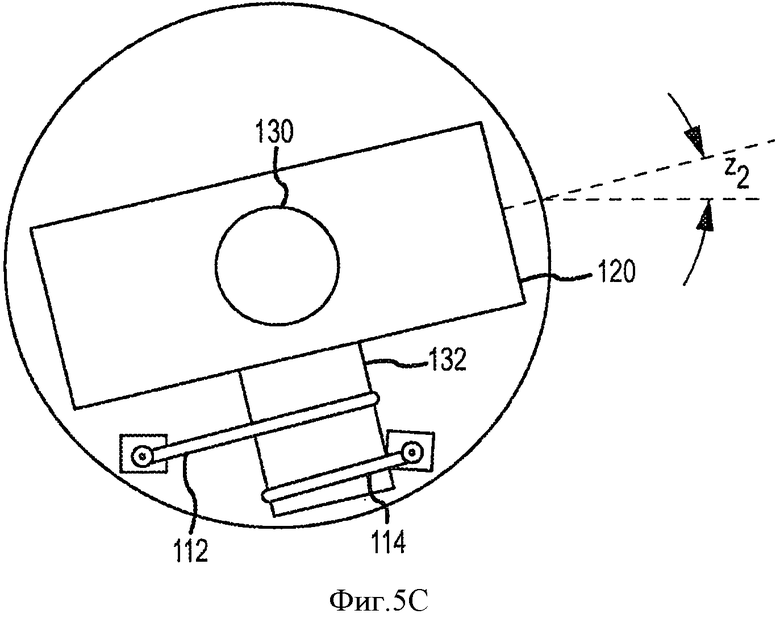
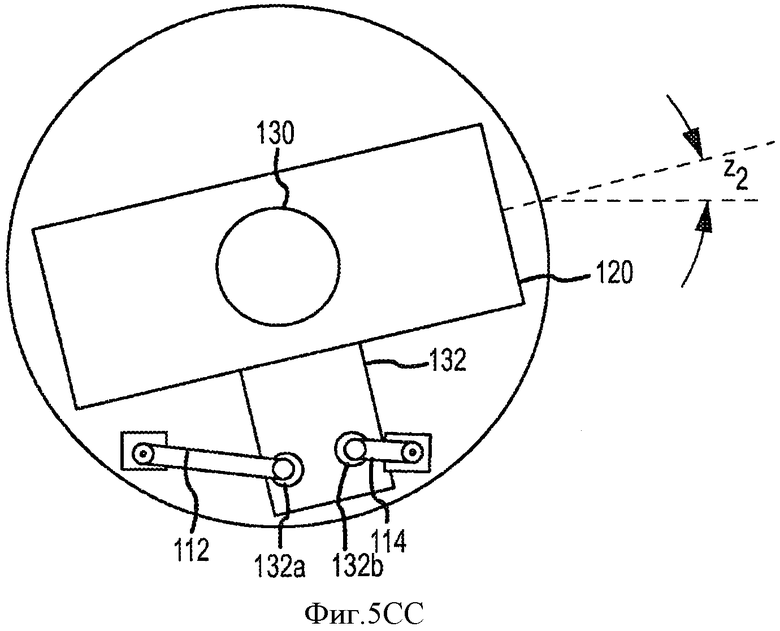



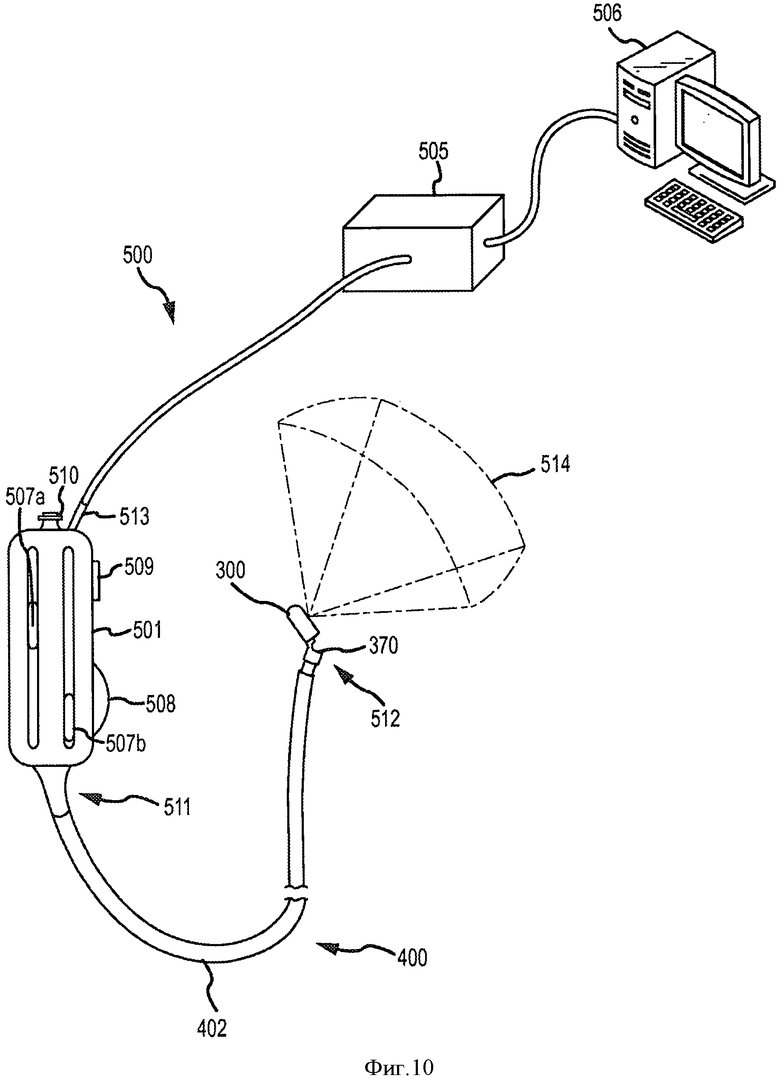
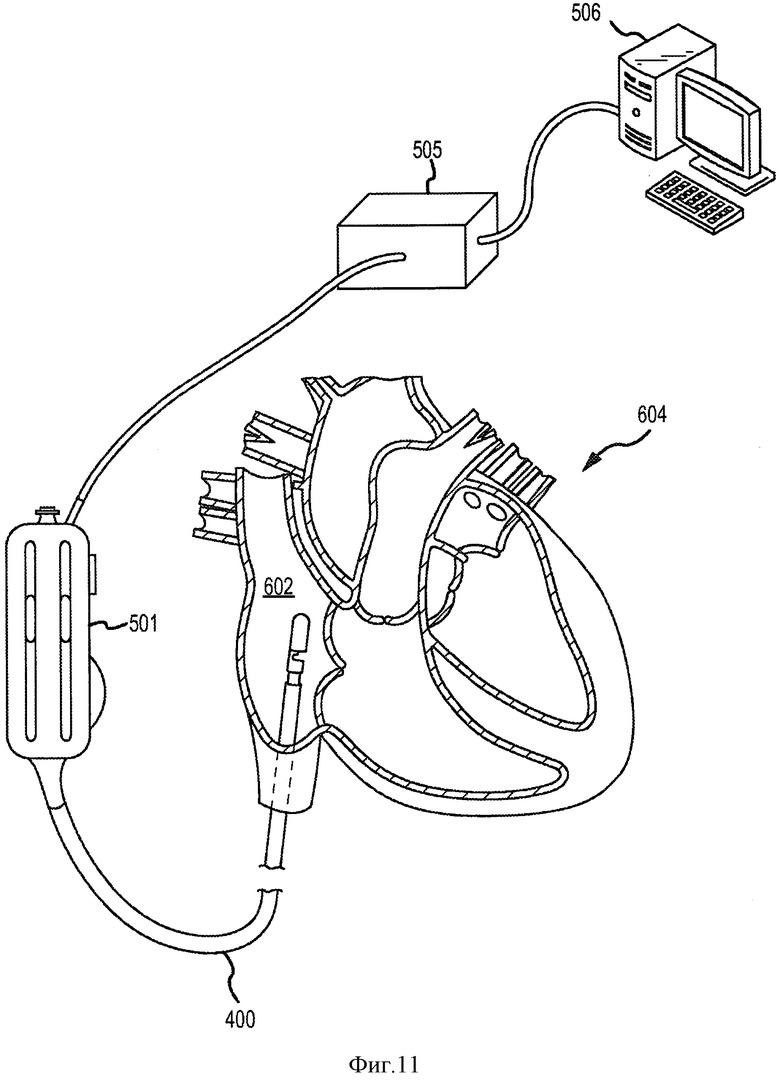
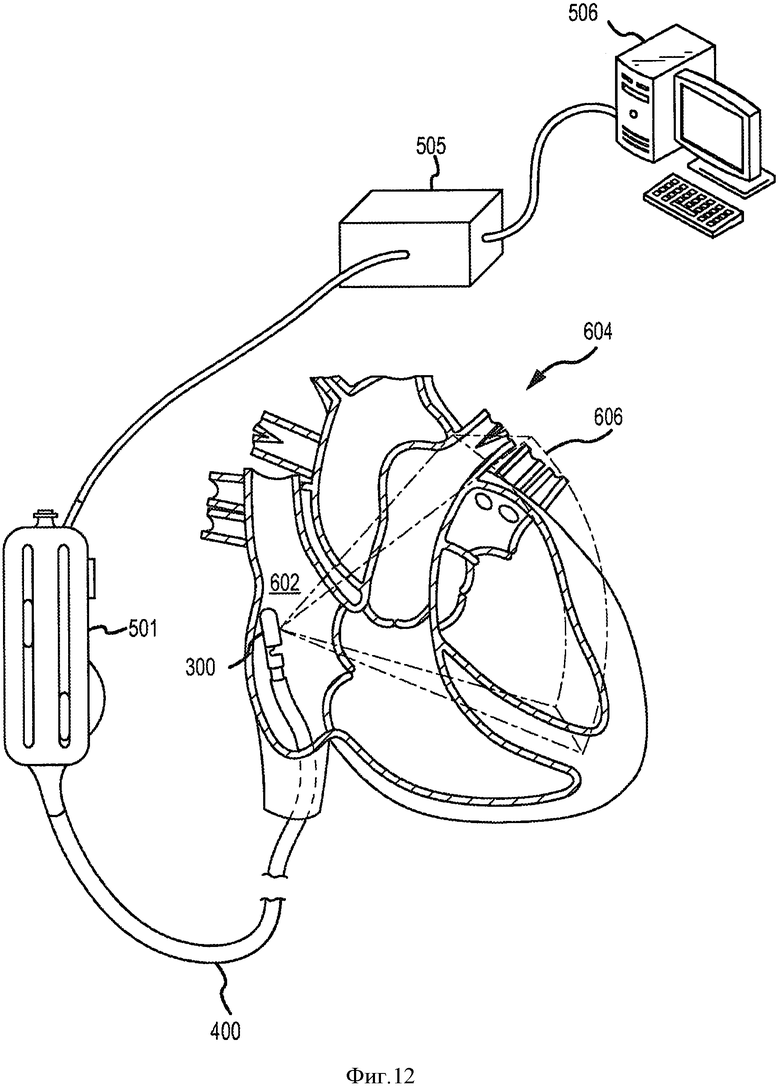

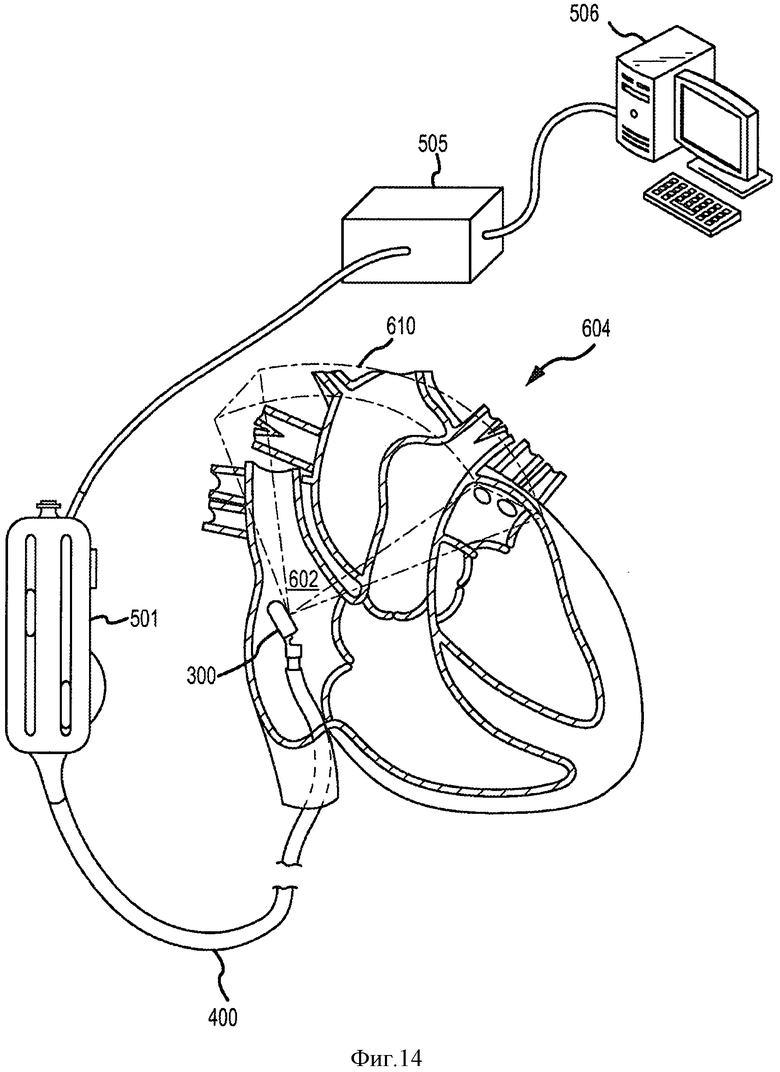

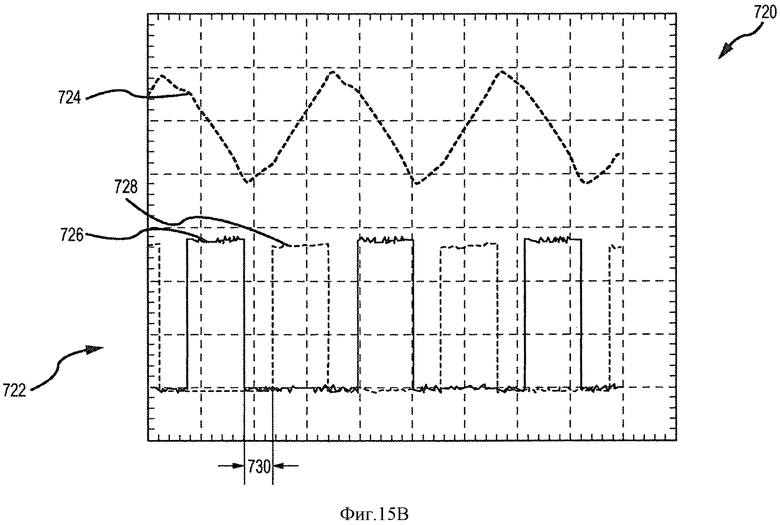
Изобретение относится к медицинской технике, а именно к катетерам для формирования изображений с использованием ультразвука. Катетер содержит удлиненный корпус, дистальный концевой элемент, образующий замкнутый объем, содержащий текучую среду, ультразвуковой преобразователь, погруженный в текучую среду и расположенный с возможностью колебаний, выполняя поворотное движение в угловом диапазоне вокруг оси поворота, проходящей вдоль длины дистального концевого элемента, внутри замкнутого объема, при этом ось поворота зафиксирована относительно дистального концевого элемента, и первый и второй элементы с памятью формы, функционально взаимосвязанные с ультразвуковым преобразователем, при этом первый и второй элементы с памятью формы активируются со смещением по времени на часть колебательного поворотного движения ультразвукового преобразователя. Способ применения катетера состоит в первой активации первого элемента с памятью формы для поворота ультразвукового преобразователя в первом направлении вокруг оси поворота, проходящей вдоль длины дистального концевого элемента катетера, второй активации второго элемента с памятью формы для поворота ультразвукового преобразователя во втором направлении вокруг оси поворота, противоположном первому направлению, повторе первого и второго этапов активации в соответствии с заданным циклом для обеспечения колебательного поворотного движения ультразвукового преобразователя в пределах углового диапазона относительно оси поворота и управлении ультразвуковым преобразователем для осуществления, по меньшей мере, одного действия из передачи и приема акустических сигналов через текучую среду во время каждого возникновения. Исполнительный элемент содержит корпус, образующий замкнутый объем, содержащий текучую среду, первый и второй элементы с памятью формы, первый и второй теплоизолирующие слои, расположенные вокруг участка первого элемента с памятью формы и участка второго элемента с памятью формы, соответственно. Использование изобретения позволяет повысить управляемость и надежность колебательного движения нагрузки при компактных размерах и низком потреблении энергии в исполнительных элементах катетеров для формирования изображений. 3 н. и 84 з.п. ф-лы, 15 ил.

1. Катетер, содержащий: удлиненный корпус катетера;
дистальный концевой элемент, установленный с поддержкой на дистальном конце корпуса катетера и образующий замкнутый объем, содержащий текучую среду;
ультразвуковой преобразователь, погруженный в упомянутую текучую среду и расположенный с возможностью колебаний, выполняя поворотное движение в угловом диапазоне вокруг оси поворота, проходящей вдоль длины дистального концевого элемента, внутри замкнутого объема, при этом ось поворота зафиксирована относительно дистального концевого элемента; и
первый и второй элементы с памятью формы, функционально взаимосвязанные с ультразвуковым преобразователем, при этом первый элемент с памятью формы является активируемым путем изменения состояния первого элемента с памятью формы, и второй элемент с памятью формы является активируемым путем изменения состояния второго элемента с памятью формы, при этом первый и второй элементы с памятью формы являются активируемыми, по меньшей мере, со смещением по времени, относительно влияния, по меньшей мере, на часть колебательного поворотного движения ультразвукового преобразователя.
2. Катетер по п.1, в котором первый и второй элементы с памятью формы функционально взаимосвязаны с ультразвуковым преобразователем внутри замкнутого объема, при этом катетер дополнительно содержит первый и второй теплоизолирующие слои, расположенные вокруг, по меньшей мере, участка первого и второго элементов с памятью формы, соответственно, и погруженные в текучую среду.
3. Катетер по п.2, в котором текучая среда представляет собой жидкость.
4. Катетер по п.3, в котором каждый из первого и второго теплоизолирующих слоев содержит фторполимер.
5. Катетер по п.4, в котором каждый из первого и второго теплоизолирующих слоев содержит, по меньшей мере, один материал, выбранный из группы, состоящей из политетрафторэтилена и расширенного политетрафторэтилена.
6. Катетер по п.3, в котором каждый из первого и второго теплоизолирующих слоев содержит, по меньшей мере, один материал, который является гидрофобным.
7. Катетер по п.3, в котором каждый из первого и второго теплоизолирующих слоев содержит, по меньшей мере, один материал, который является микропористым.
8. Катетер по п.3, в котором каждый из первого и второго теплоизолирующих слоев имеет теплопроводность приблизительно от 0,05 Вт/(м·К) до 0,08 Вт/(м·К), которая измеряется при температуре приблизительно 25°С.
9. Катетер по п.8, в котором первый и второй теплоизолирующие слои содержат расширенный политетрафторэтилен.
10. Катетер по п.3, дополнительно содержащий первый и второй внешние слои, приклеенные вокруг первого и второго теплоизолирующих слоев, соответственно, и погруженные в текучую среду.
11. Катетер по п.10, в котором каждый из первого и второго внешних слоев имеет напряжение, выдерживаемое диэлектриком, по меньшей мере, приблизительно 500 кВ/м.
12. Катетер по п.10, в котором каждый из первого и второго внешних слоев содержит гидрофобный материал.
13. Катетер по п.12, в котором первый и второй внешние слои имеют поверхностную энергию меньше чем приблизительно 50 дин/см2.
14. Катетер по п.1, в котором первый элемент с памятью формы является активируемым для поворота ультразвукового преобразователя в первом направлении вокруг оси поворота, при этом второй элемент с памятью формы является активируемым для поворота ультразвукового преобразователя во втором направлении вокруг оси поворота, причем первое направление противоположно второму направлению.
15. Катетер по п.14, в котором первый и второй элементы с памятью формы определены соответствующими первым и вторым отрезками проводов с памятью формы, соответственно, при этом первый конец первого отрезка провода с памятью формы жестко соединен с одним элементом из дистального концевого элемента и ультразвукового преобразователя с одной стороны оси поворота, причем первый конец второго отрезка провода с памятью формы жестко соединен с одним элементом из дистального концевого элемента и ультразвукового преобразователя с другой стороны оси поворота, противоположной первой стороне.
16. Катетер по п.15, в котором первый отрезок провода с памятью формы соединен с соответствующим одним элементом из ультразвукового преобразователя и дистального концевого элемента в первом месте соединения, при этом второй отрезок провода с памятью формы соединен с соответствующим другим концом ультразвукового преобразователя и дистальным концевым элементом во втором месте соединения, причем первое и второе места соединения находятся на противоположных сторонах от оси поворота.
17. Катетер по п.16, в котором каждый из первого и второго отрезков провода с памятью формы, имеющих соответствующие вторые концы, жестко соединен с соответствующим одним элементом из дистального концевого элемента и ультразвукового преобразователя, при этом первый и второй отрезки провода с памятью формы соединены между их соответствующими первым и вторым концами с соответствующим другим элементом из дистального концевого элемента и ультразвукового преобразователя в соответствующих первом и втором местах соединения, соответственно, причем первое и второе места соединения смещены в противоположные стороны от оси поворота.
18. Катетер по п.17, в котором каждый из первого и второго отрезков провода с памятью формы включает в себя соответствующие первый и второй участки, которые образуют между ними соответствующие первый и второй углы раствора, соответственно.
19. Катетер по п.18, в котором первый и второй отрезки провода с памятью формы выполнены так, что первый и второй углы раствора увеличиваются и уменьшаются в ответ на соответствующую активацию и деактивацию первого и второго отрезков провода с памятью формы, соответственно.
20. Катетер по п.16, в котором первый и второй места соединения, по существу, эквидистантны от оси поворота ультразвукового преобразователя.
21. Катетер по п.20, в котором первый и второй отрезки провода с памятью формы расположены симметрично относительно ультразвукового преобразователя.
22. Катетер по п.16, в котором первое место соединения расположено на другой стороне оси поворота, при этом второе место соединения расположено на одной стороне оси поворота.
23. Катетер по п.15, в котором первый отрезок провода с памятью формы имеет соответствующий второй конец, жестко соединенный с соответствующим одним элементом из дистального концевого элемента и ультразвукового преобразователя, при этом катетер дополнительно содержит соединительный элемент, жестко соединенный с другим одним элементом из дистального концевого элемента и ультразвукового преобразователя, с которым соединены первый и второй концы первого отрезка провода с памятью формы, при этом отрезок провода с памятью формы выполнен с возможностью взаимодействия с соединительным элементом для поворота ультразвукового преобразователя в первом направлении в течение активации первого отрезка провода с памятью формы.
24. Катетер по п.23, в котором второй отрезок провода с памятью формы имеет соответствующий второй конец, жестко соединенный с соответствующим одним элементом из дистального концевого элемента и ультразвукового преобразователя, при этом второй отрезок провода с памятью формы выполнен с возможностью взаимодействия с соединительным элементом для поворота ультразвукового преобразователя во втором направлении во время активации второго отрезка с памятью формы.
25. Катетер по п.15, в котором первый и второй отрезки провода с памятью формы содержат физически разделенные первый и второй отрезки провода, соответственно.
26. Катетер по п.15, в котором первый и второй отрезки провода с памятью формы определены соответствующими разными участками непрерывного провода с памятью формы.
27. Катетер по п.1, дополнительно содержащий источник энергии привода для многократной подачи первого и второго сигналов энергии во время соответствующих первого и второго периодов времени в первый и второй элементы с памятью формы для изменения состояния первого и второго элементов с памятью формы, соответственно, с первым интервалом времени между концом каждого первого периода времени и началом каждого второго периода времени, при этом, по меньшей мере, второй элемент с памятью формы выполнен с возможностью упругого растяжения во время, по меньшей мере, части каждого из первого интервала времени таким образом, что второй элемент с памятью формы во время работы имеет возможность воздействия, по меньшей мере, на часть колебательного поворотного движения ультразвукового преобразователя во время каждого первого интервала времени.
28. Катетер по п.27, в котором источник энергии привода выполнен с возможностью многократной подачи первого и второго сигналов энергии со вторым интервалом времени между окончанием каждого второго периода времени и началом каждого первого периода времени, при этом первый элемент с памятью формы выполнен с возможностью упругого растяжения во время, по меньшей мере, части каждого второго интервала времени таким образом, что первый элемент с памятью формы, во время работы, имеет возможность воздействия, по меньшей мере, на часть колебательного поворотного движения ультразвукового преобразователя во время каждого второго интервала времени.
29. Катетер по п.28, в котором первый и второй элементы с памятью формы выполнены с возможностью воздействия на разные части колебательного поворотного движения ультразвукового преобразователя в соответствии с противоположными концевыми участками углового диапазона.
30. Катетер по п.1, который дополнительно содержит первый магнитный элемент, соединенный с удержанием с одним элементом из дистального концевого участка и ультразвукового преобразователя и установленный с возможностью воздействия, по меньшей мере, на первую часть колебательного поворотного движения ультразвукового преобразователя.
31. Катетер по п.30, в котором первый магнитный элемент содержит постоянный магнит.
32. Катетер по п.30, в котором первый магнитный элемент содержит электромагнитный элемент.
33. Катетер по п.30, который дополнительно содержит второй магнитный элемент, соединенный с удержанием с одним элементом из дистального концевого участка и ультразвукового преобразователя и установленный с возможностью воздействия, по меньшей мере, на вторую часть колебательного поворотного движения ультразвукового преобразователя
34. Катетер по п.33, в котором первая и вторая части колебательного поворотного движения ультразвукового преобразователя соответствуют противоположным концевым участкам заданного углового диапазона.
35. Катетер по п.33, в котором каждый из первого и второго магнитных элементов, во время работы, выполнен с возможностью приложения одной силы из силы притяжения и силы отталкивания, по меньшей мере, к одному из намагничиваемых элементов, соединенных с соответствующим другим одним элементом из дистального концевого элемента и ультразвукового преобразователя.
36. Катетер по п.1, в котором дистальный концевой элемент имеет возможность избирательной установки в диапазоне углов относительно корпуса катетера.
37. Катетер по п.1, в котором дистальный концевой элемент имеет возможность избирательного вращения относительно корпуса катетера.
38. Способ применения катетера, имеющего ультразвуковой преобразователь, погруженный в текучую среду и выполненный с возможностью поворотного движения вокруг оси поворота, проходящей вдоль длины дистального концевого элемента катетера, в пределах замкнутого объема, определенного дистальным концевым элементом, установленным с удержанием на дистальном конце удлиненного корпуса катетера, включающий:
первую активацию первого элемента с памятью формы, функционально взаимосвязанного с ультразвуковым преобразователем, для поворота ультразвукового преобразователя в первом направлении вокруг оси поворота, проходящей вдоль длины дистального концевого элемента катетера;
вторую активацию второго элемента с памятью формы, функционально взаимосвязанного с ультразвуковым преобразователем, для поворота ультразвукового преобразователя во втором направлении вокруг оси поворота, проходящей вдоль длины дистального концевого элемента катетера, противоположном первому направлению;
повтор первого и второго этапов активации в соответствии с заданным циклом для обеспечения колебательного поворотного движения ультразвукового преобразователя в пределах углового диапазона относительно оси поворота; и
управление ультразвуковым преобразователем для осуществления, по меньшей мере, одного действия из передачи и приема акустических сигналов через текучую среду во время, по меньшей мере, части каждого возникновения, по меньшей мере, одного из первого и второго этапов активации.
39. Способ по п.38, в котором первый этап активации содержит:
первое приложение первого электрического сигнала к первому элементу с памятью формы для изменения первого элемента с памятью формы из первой конфигурации во вторую конфигурацию и, таким образом, приложения первой силы к ультразвуковому преобразователю;
при этом второй этап активации содержит:
второе приложение второго электрического сигнала ко второму элементу с памятью формы для изменения второго элемента с памятью формы из первой конфигурации во вторую конфигурацию и, таким образом, приложения второй силы к ультразвуковому преобразователю.
40. Способ по п.39, в котором первый и второй элементы с памятью формы определены соответствующими первым и вторым отрезками провода с памятью формы, соответственно, при этом первый отрезок провода с памятью формы имеет возможность сокращения во время первого этапа приложения, а второй отрезок с памятью формы имеет возможность сокращения во время второго этапа приложения.
41. Способ по п.40, в котором каждый из первого и второго отрезков провода с памятью формы имеет соответствующие первый и второй концы, жестко соединенные с дистальным концевым участком, при этом первый и второй отрезки провода с памятью формы соединены между их соответствующими первым и вторым концами с ультразвуковым преобразователем в соответствующих первом и втором местах соединения со смещением от оси поворота, причем первое и второе места соединения расположены на противоположных сторонах оси поворота.
42. Способ по п.41, в котором каждый из первого и второго отрезков провода с памятью формы включает в себя соответствующие первый и второй участки, которые продолжаются от их соответствующего первого места соединения и второго места соединения для определения соответствующих первого и второго углов раствора, соответственно, при этом способ дополнительно содержит:
увеличение первого угла раствора и уменьшение второго угла раствора во время первого этапа приложения; и
увеличение второго угла раствора и уменьшение первого угла раствора во время второго этапа приложения.
43. Способ по п.39, дополнительно содержащий:
применение первой силы для возврата второго элемента с памятью формы из его второй конфигурации в его первую конфигурацию; и
применение второй силы для возврата первого элемента с памятью формы из его второй конфигурации в его первую конфигурацию.
44. Способ по п.43, в котором колебательное поворотное движение ультразвукового преобразователя возникает с частотой от 1 до 50 Гц.
45. Способ по п.43, в котором колебательное поворотное движение ультразвукового преобразователя возникает с частотой от 8 до 30 Гц.
46. Способ по п.43, в котором колебательное поворотное движение ультразвукового преобразователя возникает с частотой по меньшей мере 10 Гц.
47. Способ по п.43, в котором колебательное поворотное движение ультразвукового преобразователя возникает с частотой по меньшей мере 50 Гц.
48. Способ по п.39, в котором заданный цикл включает в себя первый временной интервал между концом первого этапа приложения и началом второго этапа приложения, при этом способ дополнительно содержит:
использование упругого отклика второго элемента с памятью формы в течение каждого первого интервала для инициирования поворотного движения ультразвукового преобразователя во втором направлении.
49. Способ по п.48, в котором заданный цикл включает в себя второй временной интервал между концом второго этапа приложения и началом первого этапа приложения, при этом способ дополнительно содержит:
использование упругого отклика первого элемента с памятью формы в течение каждого второго интервала для инициирования поворотного движения ультразвукового преобразователя в первом направлении.
50. Способ по п.39, в котором, по меньшей мере, один магнит соединен с одним элементом из дистального концевого элемента и ультразвукового преобразователя, при этом способ дополнительно содержит:
использование, по меньшей мере, одного магнита для приложения магнитной силы к ультразвуковому преобразователю для воздействия, по меньшей мере, на часть колебательного поворотного движения.
51. Способ по п.39, в котором первый магнит соединен с ультразвуковым преобразователем, а второй магнит соединен с дистальным концевым элементом, при этом способ дополнительно содержит:
использование первого магнита и второго магнита для приложения магнитных сил, чтобы воздействовать на разные части колебательного поворотного движения.
52. Способ по п.38, дополнительно содержащий:
управление ультразвуковым преобразователем для приема акустических сигналов через текучую среду во время, по меньшей мере, части каждого возникновения, по меньшей мере, одного этапа из первого и второго этапов активации и для обеспечения соответствующего выходного сигнала; и
использование выходного сигнала в системе формирования ультразвукового изображения.
53. Способ по п.38, дополнительно содержащий:
управление ультразвуковым преобразователем для приема акустических сигналов через текучую среду во время, по меньшей мере, части каждого возникновения, по меньшей мере, одного этапа из первого и второго этапов активации и для обеспечения соответствующего выходного сигнала; и
обработку выходного сигнала с помощью компьютерного процессора для генерирования, по меньшей мере, трехмерных изображений.
54. Способ по п.53, дополнительно содержащий отображение трехмерных изображений в интерфейсе пользователя.
55. Исполнительный элемент для колебательного движения нагрузки вокруг оси поворота, проходящей вдоль длины исполнительного элемента, содержащий:
корпус, образующий замкнутый объем, содержащий текучую среду;
первый и второй элементы с памятью формы, каждый из которых функционально взаимосвязан с нагрузкой, при этом первый и второй элементы с памятью формы являются активируемыми для воздействия на, по меньшей мере, часть колебательного движения нагрузки, причем, по меньшей мере, участок первого элемента с памятью формы и участок второго элемента с памятью формы погружены в текучую среду; а
первый и второй теплоизолирующие слои расположены вокруг участка первого элемента с памятью формы и участка второго элемента с памятью формы, соответственно,
при этом первый элемент с памятью формы является активируемым для поворота нагрузки в первом направлении вокруг оси поворота, проходящей вдоль длины исполнительного элемента, при этом второй элемент с памятью формы является активируемым для поворота нагрузки во втором направлении вокруг оси поворота, проходящей вдоль длины исполнительного элемента, причем первое направление противоположно второму направлению.
56. Исполнительный элемент по п.55, в котором каждый из первого и второго теплоизолирующих слоев содержит фторполимер.
57. Исполнительный элемент по п.56, в котором каждый из первого и второго теплоизолирующих слоев содержит, по меньшей мере, один материал, выбранный из группы, состоящей из политетрафторэтилена и расширенного политетрафторэтилена.
58. Исполнительный элемент по п.55, в котором текучая среда представляет собой жидкость.
59. Исполнительный элемент по п.58, в котором каждый из первого и второго теплоизолирующих слоев имеет теплопроводность приблизительно от 0,05 Вт/(м·К) до 0,08 Вт/(м·К),которая измеряется при температуре приблизительно 25°С.
60. Исполнительный элемент по п.59, в котором первый и второй теплоизолирующие слои содержат расширенный политетрафторэтилен.
61. Исполнительный элемент по п.59, который дополнительно содержит первый и второй внешние слои, установленные на клею вокруг первого и второго теплоизолирующих слоев, соответственно, и погруженные в текучую среду.
62. Исполнительный элемент по п.61, в котором каждый из первого и второго внешних слоев имеет напряжение, выдерживаемое диэлектриком, по меньшей мере, приблизительно 500 кВ/м.
63. Исполнительный элемент по п.61, в котором каждый из первого и второго внешних слоев содержит гидрофобный материал.
64. Исполнительный элемент по п.61, в котором каждый из первого и второго внешних слоев имеет поверхностную энергию меньше чем приблизительно 50 дин/см2.
65. Исполнительный элемент по п.55, в котором первый и второй элементы с памятью формы образованы соответствующими первым и вторым отрезками провода с памятью формы, соответственно, при этом первый конец первого отрезка провода с памятью формы жестко соединен с одним элементом из корпуса и нагрузки с одной стороны оси поворота, при этом первый конец второго отрезка провода с памятью формы жестко соединен с одним элементом из корпуса и нагрузки с другой стороны от оси поворота, противоположной одной стороне.
66. Исполнительный элемент по п.65, в котором первый отрезок провода с памятью формы соединен с другим одним элементом из нагрузки и корпуса в первом месте соединения, при этом второй отрезок с памятью формы соединен с соответствующим другим одним элементом из нагрузки и корпуса во втором месте соединения, причем первое и второе места соединения расположены с противоположных сторон оси поворота.
67. Исполнительный элемент по п.66, в котором каждый из первого и второго отрезков провода с памятью формы имеет соответствующие вторые концы, жестко соединенные с соответствующим одним элементом из корпуса и нагрузки, при этом первый и второй отрезки провода с памятью формы соединены между их соответствующими первым и вторым концами с соответствующим другим одним элементом из корпуса и нагрузки в соответствующих первом и втором местах соединения, соответственно, причем первое и второе места соединения смещены на противоположные стороны от оси поворота.
68. Исполнительный элемент по п.67, в котором каждый из первого и второго отрезков провода с памятью формы включает в себя соответствующие первый и второй участки, образующие соответствующие первый и второй углы раствора между ними, соответственно.
69. Исполнительный элемент по п.68, в котором первый и второй отрезки провода с памятью формы выполнены таким образом, что первый и второй углы раствора увеличиваются и уменьшаются в ответ на соответствующую активацию и деактивацию первого и второго отрезков провода с памятью формы, соответственно.
70. Исполнительный элемент по п.66, в котором первое и второе места соединения, по существу, эквидистантны от оси поворота нагрузки.
71. Исполнительный элемент по п.70, в котором первый и второй отрезки провода с памятью формы расположены симметрично относительно нагрузки.
72. Исполнительный элемент по п.55, в котором первый и второй элементы с памятью формы определены соответствующими первым и вторым отрезками провода с памятью формы, соответственно, причем каждый из первого и второго отрезков с памятью формы имеет соответствующие первый и второй концы, жестко соединенные с оболочкой, при этом первый и второй отрезки провода с памятью формы соединены между их соответствующим первым и вторым концами с нагрузкой в соответствующих первом и втором местах соединения, смещенных от оси поворота нагрузки, причем первое и второе смещенные места расположены с противоположных сторон оси поворота.
73. Исполнительный элемент по п.72, в котором каждый из первого и второго отрезков провода с памятью формы включает в себя соответствующие первый и второй участки, которые продолжаются в сторону от их соответствующего первого места соединения и второго места соединения, соответственно, для определения соответствующих первого и второго углов раствора, соответственно.
74. Исполнительный элемент по п.73, в котором первый и второй отрезки провода с памятью формы расположены так, что их первый и второй углы раствора увеличиваются и уменьшаются в ответ на соответствующую активацию и деактивацию первого и второго элементов с памятью формы, соответственно.
75. Исполнительный элемент по п.74, в котором первое и второе места соединения, по существу, эквидистанты от оси поворота.
76. Исполнительный элемент по п.75, в котором первый и второй отрезки провода с памятью формы расположены симметрично относительно нагрузки.
77. Исполнительный элемент по п.55, дополнительно содержащий источник сигнала управления для многократной подачи первого и второго сигналов активации во время соответствующих первого и второго периодов времени в первый и второй элементы с памятью формы, соответственно, причем первый интервал времени расположен между концом каждого первого периода времени и началом каждого второго периода времени, причем, по меньшей мере, второй элемент с памятью формы имеет возможность находиться в состоянии упругого растяжения в течение, по меньшей мере, части каждого первого интервала времени таким образом, что второй элемент с памятью формы во время работы имеет возможность воздействия, по меньшей мере, на часть колебательного движения нагрузки во время каждого первого интервала времени.
78. Исполнительный элемент по п.77, в котором источник сигнала управления выполнен с возможностью многократной передачи первого и второго сигналов активации со вторым интервалом времени между концом каждого второго периода времени и началом каждого первого периода времени, при этом первый элемент с памятью формы имеет возможность находиться в состоянии упругого растяжения в течение, по меньшей мере, части каждого второго интервала времени таким образом, что первый элемент с памятью формы во время работы имеет возможность воздействия, по меньшей мере, на часть колебательного движения нагрузки в течение каждого второго интервала времени.
79. Исполнительный элемент по п.78, в котором первый и второй элементы с памятью формы выполнены с возможностью воздействия на разные части колебательного движения нагрузки, соответствующие противоположным концевым частям заданного диапазона движения.
80. Исполнительный элемент по п.55, дополнительно содержащий первый магнитный элемент, выполненный с возможностью воздействия на, по меньшей мере, первую часть колебательного движения нагрузки.
81. Исполнительный элемент по п.80, в котором первый магнитный элемент содержит постоянный магнит.
82. Исполнительный элемент по п.80, в котором первый магнитный элемент содержит электромагнитный элемент.
83. Исполнительный элемент по п.80, который дополнительно содержит второй магнитный элемент, установленный с удержанием для воздействия, по меньшей мере, на вторую часть колебательного движения нагрузки.
84. Исполнительный элемент по п.83, в котором первая и вторая части колебательного движения нагрузки соответствуют противоположным концевым частям заданного диапазона движения.
85. Исполнительный элемент по п.83, в котором, по меньшей мере, один элемент из первого и второго магнитных элементов во время работы имеет возможность приложения силы притяжения, по меньшей мере, к одному намагничиваемому элементу, соединенному с нагрузкой.
86. Исполнительный элемент по п.83, в котором, по меньшей мере, один элемент из первого и второго магнитных элементов, во время работы, имеет возможность приложения силы притяжения к другому магниту, соединенному с нагрузкой.
87. Исполнительный элемент по п.83, в котором, по меньшей мере, один элемент из первого и второго магнитных элементов, во время работы, имеет возможность приложения силы отталкивания к другому магниту, соединенному с нагрузкой.
| US 5377685 A, 03.01.1995 | |||
| US 6198956 B1, 06.03.2001 | |||
| US 5396769 A, 14.03.1995 | |||
| US 4544988 A, 01.10.1985 | |||
| US 6039743 А, 21.03.2000 | |||
| US 2006173344 A1, 03.08.2006 | |||
| US 5379772 A, 10.01.1995 | |||
| US 2009093726 A1, 09.04.2009 | |||
| RU 2008138272 A, 27.03.2010 |

