Уровень техники
Катетеры представляют собой трубчатые медицинские устройства, которые могут быть вставлены в сосуд, полость или канал тела, и ими можно манипулировать, используя участок, который выступает за пределы тела. Как правило, катетеры являются относительно тонкими и гибкими, что облегчает проталкивание вперед/удаление по нелинейным путям. Катетеры могут использоваться самых разных назначений, включая в себя установку внутри тела диагностических и/или терапевтических устройств. Например, катетеры можно использовать для установки устройства формирования внутренних изображений, размещения имплантируемых устройств (например, стентов, стентов-трансплантатов, венозных фильтров) и/или для подачи энергии (например, абляционные катетеры).
В этом отношении, использование технологий формирования ультразвуковых изображений для получения видимых изображений структур все чаще применяется, в частности, в медицине. В широком смысле, ультразвуковой преобразователь, обычно содержащий множество индивидуально активируемых пьезоэлектрических элементов, возбуждают с помощью соответствующих сигналов возбуждения таким образом, что импульс ультразвуковой энергии распространяется в теле пациента. Ультразвуковая энергия отражается на границах перехода между структурами с различным акустическим импедансом. Тот же самый или другой преобразователь детектируют прием обратной энергии и обеспечивают соответствующий выходной сигнал. Этот сигнал может быть обработан известным образом для получения изображения, которое может быть представлено на экране дисплея, границ перехода между структурами и, следовательно, самих структур.
В различных патентах предшествующего уровня техники описано использование формирования ультразвукового изображения в комбинации со специализированным хирургическим оборудованием, для выполнения очень точных хирургических процедур. Например, в ряде патентов представлено использование ультразвуковых технологий для направления "биопсийного пистолета, то есть, инструмента для отбора образца ткани из определенной области для патологического исследования, например, для определения, представляет ли определенная структура злокачественную опухоль и т.п. Аналогично, в других патентах предшествующего уровня техники описывается использование технологий формирования ультразвуковых изображений для помощи в других деликатных операциях, например, при изъятии жизнеспособных яйцеклеток для экстракорпорального оплодотворения и для аналогичных целей.
В последние несколько десятилетий произошли существенные прорывы в разработке и применении хирургических медицинских устройств, включающих в себя внутренние венозные фильтры, стенты для сосудов, стенты-трансплантаты для аневризмы аорты, блокаторы сосудов, сердечные блокаторы, протезы сердечных клапанов, а также доставку катетера и иглы для радиочастотной абляции. Однако способы формирования изображения до сих пор не применяются, поскольку эти процедуры обычно выполняют, используя флюороскопическое наведение и используя рентгеноконтрастные агенты. Флюороскопия имеет недостатки, включающие в себя ее неспособность формировать изображения мягких тканей и неотъемлемое облучение, как пациента, так и клинического врача. Кроме того, обычное формирование флюороскопических изображений обеспечивает только плоское двумерное (2-D) изображение.
Катетеры для внутрисердечной эхокардиографии (ICE) стали предпочтительным способом формирования изображений для использования при структурированной сердечной хирургии, поскольку они обеспечивают 2-D ультразвуковые изображения с высоким разрешением структуры мягкой ткани сердца. Кроме того, при формировании изображений ICE не требуется использовать ионизирующее излучение для процедуры. Катетеры ICE может использовать хирург - кардиолог и медицинские сотрудники в контексте их нормальной работы при выполнении процедур и без добавления другого клинического персонала. Катетеры ICE в соответствии с современными технологиями, однако, имеют ограничения. Обычные катетеры ICE ограничены генерированием только 2-D изображений. Кроме того, клинический врач должен управлять катетером и изменять его положение для съемки множества планов изображений в пределах анатомии. Манипуляция катетером для получения конкретных планов 2-D изображения требует существенных затрат времени пользователя, пока он не научится легко управлять механизмами управления катетером.
Визуализация трехмерной (3-D) среды архитектуры сердца, например, на основе режима реального времени, во время хирургической операции, была бы в значительной степени востребованной с точки зрения клинической перспективы, поскольку она позволила бы выполнять более сложные процедуры, такие как окклюзия левого придатка предсердия, исправление митрального клапана сердца и абляция для фибрилляции предсердий. Формирование 3-D изображений также позволило бы клиническому врачу полностью определять относительное положение структур. Такая способность является особенно важной в случае структурных отклонений в сердце, когда типичная анатомия не присутствует. Двумерные массивы преобразователей обеспечивают средство для генерирования 3-D изображений, но доступные в настоящее время 2-D массивы требуют наличия множества элементов для получения достаточного размера отверстия и соответствующего разрешения изображения. Такое большое количество элементом приводит к получению 2-D преобразователя, который невозможно использовать в клинически доступных профилях катетера.
Эхокардиографическая система Philips iE33, в которой используется новый 3-D чреспищеводный (TEE) зонд (поставляется компанией Philips, Healthcare, Andover, MA, USA) представляет первое, коммерчески доступное, работающее в режиме реального времени 3-D (четырехмерное (4D)) TEE устройство формирования ультразвукового изображения. Такая система обеспечивает для клинического врача возможности формирования 4D изображений, необходимые для более сложных операций, но при этом присутствуют несколько существенных недостатков, связанных с этой системой. Из-за большого размера зонда TEE (окружность 50 миллиметров и ширина 16,6 миллиметров), пациенты должны быть анестезированы или находиться под воздействием сильных седативных средств перед введением зонда (G. Hamilton Baker, MD et al., Usefulness of Live Three-Dimensional Transesophageal Echocardiography in a Congenital Heart Disease Center, Am J Cardiol 2009; 103: 1025-1028). Это требует присутствия анестезиолога для введения анестезии и слежения за пациентом во время анестезии. Кроме того, определенная гемодинамическая информация, относящаяся к процедуре, должна быть собрана перед проведением общей анестезии, из-за влияния анестезирующего средства на гемодинамическое состояние пациента. Кроме того, возникают незначительные и существенные сложности из-за использования зонда TEE, включая в себя осложнения в диапазоне от боли в горле до разрыва пищевода. Сложность системы Phillips TEE и ее зонда требует участия дополнительного персонала, такого как анестезиолог, эхокардиограф и специалист по ультразвуковой диагностике. Это увеличивает время процедуры и стоимость.
Врачам-хирургам требуется система формирования изображений, которая основана на катетере и которая имела бы достаточно малые размеры для подкожного доступа с возможностью формирования трехмерных изображений в режиме реального времени (4D). Вместо управления катетером внутри анатомии для съемки различных видов, как и в случае, с обычными катетерами ICE, желательно, чтобы такая система катетера была выполнена с возможностью получения множества планов изображений или объемов из одного стабильного положения катетера в пределах анатомии. Катетер, который позволил бы клиническому врачу направлять или управлять катетером до положения в пределах сердца, сосудистой сети или других полостей тела, фиксировать катетер в стабильном положении, и также при этом обеспечить возможность выбора определенного диапазона планов или объемов изображения в пределах анатомии помог бы выполнять более сложные процедуры. Из-за ограничения в размерах некоторых анатомических местоположений, например, внутри сердца, желательно, чтобы могли быть получены углы необходимого обзора в пределах малого анатомического объема, который, например, меньше чем приблизительно 3 см.
Для внутренних диагностических и терапевтических процедур сохраняется требование улучшенного формирования изображения во время процедуры, используя компактные и маневренные катетеры. Более конкретно, авторы настоящего изобретения определили необходимость предоставления таких свойств катетера, которые облегчают избирательное расположение и управление компонентами, расположенными на дистальном конце катетера, при поддержании относительно малого профиля, способствуя, таким образом, улучшенной функциональности в различных клинических приложениях.
Раскрытие изобретения
Настоящее изобретение относится к конструкциям улучшенных катетеров. С этой целью, катетер определен, как устройство, которое выполнено с возможностью его вставки в сосуд тела, полость или канал, в котором, по меньшей мере, часть катетера продолжается за пределы тела, и катетером можно манипулировать, и/или его можно удалять из тела, манипулируя/вытягивая участок катетера, выступающий за пределы тела. Варианты осуществления катетеров, раскрытые здесь, могут включать в себя корпус катетера. Корпус катетера, например, может включать в себя внешний трубчатый корпус, внутренний трубчатый корпус, стержень катетера или любую их комбинацию. Варианты корпуса катетера, раскрытые здесь, могут включать в себя или могут не включать в себя канал. Такие каналы могут представлять собой каналы транспортирования для транспортирования устройства и/или материала. Например, такие каналы могут использоваться для подачи хирургического устройства, подачи диагностического устройства, имплантации и/или извлечения объекта, подачи лекарств или любой их комбинации.
Варианты осуществления раскрытых здесь конструкций катетеров могут включать в себя отклоняющийся элемент. Отклоняющийся элемент может быть расположен на дистальном конце корпуса катетера и им можно оперировать для отклонения относительно корпуса катетера. "Отклоняющийся" определен как возможность перемещать элемент, соединенный с корпусом катетера, или участком корпуса катетера, от продольной оси корпуса катетера, предпочтительно, таким образом, что элемент или участок корпуса катетера полностью или частично обращен вперед. Отклоняющийся также может включать в себя возможность перемещать элемент или участок корпуса катетера от продольной оси корпуса катетера, предпочтительно, таким образом, что элемент или участок корпуса катетера полностью или частично обращен назад. Отклоняющийся может также включать в себя возможность перемещать элемент от продольной оси корпуса катетера на дистальном конце корпуса катетера. Например, отклоняющийся элемент может во время работы отклоняться на плюс или минус 180° от положения, где отклоняющийся элемент выровнен с дистальным концом корпуса катетера (например, где отклоняющийся элемент дистально смещен относительно дистального конца корпуса катетера). В другом примере отклоняющийся элемент может быть отклоняющимся таким образом, что может быть открыт дистальный отверстие канала транспортирования корпуса катетера. Отклоняющийся элемент может во время работы перемещаться относительно корпуса катетера вдоль заданного пути, который определен структурой соединения между отклоняющимся элементом и корпусом катетера. Например, отклоняющийся элемент и корпус катетера каждый могут быть непосредственно соединены с шарниром (например, отклоняющийся элемент и корпус катетера каждый может находиться в контакте с и/или закреплен на шарнире), расположенном между отклоняющимся элементом и корпусом катетера, и шарнир может определять заданный путь движения, по которому отклоняющийся элемент может перемещаться относительно корпуса катетера. Отклоняющийся элемент может избирательно отклоняться относительно корпуса катетера, для того, чтобы способствовать работе компонентов, содержащих отклоняющийся элемент.
Отклоняющийся элемент может включать в себя двигатель для избирательного движения с приводом компонента или компонентов внутри отклоняющегося элемента. Двигатель может представлять собой любое устройство или механизм, который создает движение, которое можно использовать для упомянутого выше избирательного движения с приводом.
Избирательно приводимый в движение компонент или компоненты могут, например, включать в себя диагностическое устройство (например, устройство формирования изображения), терапевтическое устройство или любую их комбинацию. Например, компонент с избирательным приводом может представлять собой массив преобразователей, такой как массив ультразвуковых преобразователей, который можно использовать для формирования изображения. Кроме того, массив ультразвуковых преобразователей может, например, представлять собой одномерный массив, полуторамерный массив или двумерный массив. В дополнительных примерах компонент с избирательным приводом может также представлять собой устройство для абляции, такое как аппликатор для радиочастотной (RF) абляции или аппликатор для высокочастотной ультразвуковой (HIFU) абляции.
Используемый здесь термин "формирование изображений" может включать в себя формирование ультразвукового изображения, которое представляет собой формирование либо одномерного, двумерного, трехмерного или трехмерного в режиме реального времени (4D) изображения. Двумерные изображения могут быть сгенерированы с помощью одномерных массивов преобразователей (например, линейных массивов или массивов, имеющих один ряд элементов). Трехмерные изображения могут быть получены с помощью двумерных массивов (например, массивов, которые составлены из элементов, расположенных в плоской конфигурацией размером n x n) или с помощью одномерного массива преобразователей, механически выполняющего возвратно-качательные движения. Термин "формирование изображения" также включает в себя оптическое формирование изображений, томографию, включая в себя оптическую когерентную томографию (ОСТ), формирование рентгенографических изображений, формирование фотоакустических изображений и термографию.
Катетер может включать в себя корпус катетера, имеющий проксимальный конец и дистальный конец. Катетер может дополнительно включать в себя отклоняющийся элемент, взаимно соединенный с дистальным концом. Отклоняющийся элемент может включать в себя двигатель.
В определенных вариантах осуществления изобретения отклоняющийся элемент может быть шарнирно соединен с дистальным концом корпуса катетера и во время работы может устанавливаться в определенном диапазоне углов относительно корпуса катетера. Например, отклоняющийся элемент может быть соединен с дистальным концом корпуса катетера и во время работы может устанавливаться в диапазоне углов относительно продольной оси корпуса катетера на дистальном конце. Отклоняющийся элемент может дополнительно включать в себя компонент, в котором двигатель может приводить в движение этот компонент.
В определенных вариантах осуществления изобретения движение может, например, представлять собой вращательное движение, поворотное движение вокруг шарнирной оси, возвратно-качательное движение или любую их комбинацию (например, возвратно-качательное движение с поворотом вокруг шарнирной оси). Компонент может представлять собой массив ультразвуковых преобразователей. Массив ультразвуковых преобразователей может быть выполнен с возможностью формирования, по меньшей мере, одного двумерного изображения, трехмерного изображений и трехмерного изображения в режиме реального времени. Катетер может иметь минимальную ширину представления, которая меньше чем приблизительно 3 см. Длина области корпуса катетера, в котором возникает отклонение, когда отклоняющийся элемент отклоняется на 90° относительно корпуса катетера, может быть меньше, чем максимальный поперечный размер корпуса катетера.
Корпус катетера может содержать, по меньшей мере, один управляемый участок. Например, управляемый участок может находиться рядом с дистальным концом.
Корпус катетера может содержать канал. Такой канал может быть предназначен для транспортирования устройства (например, интервенционного устройства) и/или материала. В одном варианте осуществления изобретения канал может продолжаться от проксимального конца до дистального конца.
Катетер может включать в себя шарнир, взаимно соединенный с отклоняемым элементом и корпусом катетера. В одном варианте осуществления изобретения отклоняющийся элемент может быть соединен с возможностью опоры на шарнире. В определенных вариантах осуществления изобретения шарнир может, например, представлять собой пленочный шарнир, изготовленный из того же материала, что и две жестких части, которые он соединяет, или идеальный шарнир и шарнир может включать в себя нетрубчатый гибкий участок.
В другом аспекте катетер может включать в себя внешний трубчатый корпус, отклоняющийся элемент и шарнир, взаимно соединяющий отклоняющийся элемент и внешний трубчатый корпус. Отклоняющийся элемент может включать в себя двигатель. В одном подходе отклоняющийся элемент может дополнительно включать в себя массив ультразвуковых преобразователей. Внешний трубчатый корпус может содержать, по меньшей мере, один управляемый участок. Катетер может включать в себя устройство активации, которое во время работы активно отклоняется на отклоняющемся элементе. Устройство активации может, например, включать в себя баллоны, привязные линии, провода (например, вытяжные провода), стержни, планки, трубки, гипотрубки, тонкий зонды (включая в себя предварительно сформированные тонкий зонды), электротермически активируемые материалы с памятью формы, электроактивные материалы, жидкости, постоянные магниты, электромагниты или любую их комбинацию. Катетер может включать в себя ручку, расположенную на проксимальном конце. Ручка может включать в себя подвижный элемент для управления отклонением отклоняющегося элемента. Ручка может включать в себя механизм, такой как компоновка червячной передачи, или активный тормоз, позволяющий поддерживать выбранную степень отклонения отклоняющегося элемента.
В одной компоновке катетер может включать в себя корпус катетера, имеющий, по меньшей мере, один управляемый участок и отклоняющийся элемент. Отклоняющийся элемент может включать в себя компонент и двигатель для выполнения движения компонента. В одном варианте осуществления катетер может включать в себя шарнир, взаимно соединяющий отклоняющийся элемент и корпус катетера.
В другом аспекте катетер может включать в себя корпус катетера, по меньшей мере, с одним управляемым участком, отклоняющийся элемент, компонент, расположенный с возможностью удержания на отклоняющемся элементе, и двигатель, установленный с возможностью опоры на отклоняющемся элементе, и работающий для избирательного перемещения компонента. Отклоняющийся элемент может быть расположен с возможностью опоры на дистальном конце корпуса катетера и, во время работы, может избирательно выбирать места расположения в диапазоне углов относительно продольной оси корпуса катетера на дистальном конце. В одном подходе компонент может представлять собой массив ультразвуковых преобразователей. Катетер может быть выполнен таким образом, что плоскость, которая может быть перпендикулярной продольной оси отклоняющегося элемента, пересекает как компонент, так и двигатель.
В еще одном аспекте катетер может включать в себя корпус катетера и отклоняющийся элемент, расположенный с возможностью опоры на дистальном конце корпуса катетера и, во время работы, избирательно отклоняющийся, устанавливаясь в пределах диапазона углов относительно продольной оси корпуса катетера. Катетер может дополнительно включать в себя компонент, расположенный на отклоняющемся элементе. Этот компонент во время работы может перемещаться независимо от отклоняющегося элемента, и отклоняющийся элемент может во время работы перемещаться независимо от корпуса катетера.
В определенных компоновках катетер может включать в себя корпус катетера, канал, отклоняющийся элемент и элемент электропроводника. Канал может быть предназначен для транспортировки устройства и/или материала и может продолжаться через, по меньшей мере, участок корпуса катетера до отверстия, расположенного дистально к проксимальному концу корпуса катетера. Отклоняющийся элемент может быть расположен на дистальном конце корпуса катетера и может включать в себя двигатель и компонент. Элемент электрического проводника может включать в себя множество электрических проводников в компоновке, продолжающейся от компонента до корпуса катетера. Эта компоновка может изгибаться в ответ на отклонение отклоняющегося элемента. В одном варианте осуществления компоновка может содержать компоновку гибкой платы. Такая компоновка гибкой платы может изгибаться в ответ на колебательное движение массива ультразвукового преобразователя. Компоновка гибкой платы может содержать множество электропроводных дорожек, расположенных с возможностью опоры на гибкой, неэлектропроводной подложке. В одном подходе компоновка гибкой платы может электрически объединять множество проводников, которые продолжаются от проксимального конца до дистального конца корпуса катетера.
В другой компоновке катетер может включать в себя внешний трубчатый корпус, внутренний трубчатый корпус и отклоняющийся элемент. Внутренний трубчатый корпус может определять канал через него для транспортирования устройства и/или материала. Внешний трубчатый корпус и внутренний трубчатый корпус могут быть выполнены с возможностью избирательного относительного движения между ними. По меньшей мере, участок отклоняющегося элемента может быть постоянно зафиксирован снаружи внешнего трубчатого корпуса на дистальном конце внешнего трубчатого корпуса. Отклоняющийся элемент может быть взаимно соединен с возможностью удержания на внутреннем трубчатом корпусе или на внешнем трубчатом корпусе. После избирательного относительного движения, отклоняющийся элемент может избирательно отклоняться определенным образом. Отклоняющийся элемент может включать в себя компонент (например, массив ультразвуковых преобразователей) и может работать от двигателя для движения компонента. В одном варианте осуществления изобретения отклоняющийся элемент может быть взаимно соединен с возможностью опоры на шарнире. Шарнир может быть взаимно соединен с возможностью опоры на внутреннем трубчатом корпусе и выполнен с возможностью ограниченного соединения с внешним трубчатым корпусом. Катетер может дополнительно включать в себя ограничивающий элемент, взаимно соединенный с отклоняющимся элементом и внешним трубчатым корпусом. После перемещения внутреннего трубчатого корпуса относительно внешнего трубчатого корпуса сила отклонения может быть передана на отклоняющийся элемент с помощью ограничительного элемента. Ограничительный элемент может также представлять собой гибкий элемент электрического соединения.
В другом аспекте катетер может включать в себя корпус катетера и отклоняющийся элемент. Корпус катетера может иметь, по меньшей мере, один управляемый участок. Отклоняющийся элемент может быть расположен на, и может быть взаимно соединен с дистальным концом корпуса катетера, и может избирательно отклоняться из первого положения во второе положение. Отклоняющийся элемент может содержать двигатель. В примере отклоняющийся элемент может дополнительно содержать массив ультразвуковых преобразователей. Отклоняющийся элемент может быть взаимно соединен с корпусом катетера с помощью тяги, в котором тяга взаимно соединяет с ограничением отклоняющийся элемент с корпусом катетера. Тяга может быть расположена между отклоняющимся элементом и корпусом катетера, и тяга может включать в себя гибкий элемент электрического соединения.
В еще одном аспекте катетер может включать в себя корпус катетера, отклоняющийся элемент и массив ультразвуковых преобразователей, расположенный на отклоняющемся элементе (например, в пределах отклоняющегося элемента) для шарнирного движения вокруг оси поворота. Катетер может дополнительно включать в себя первый элемент электрического соединения, имеющий первый участок, выполненный, как катушка, и электрически соединенный с массивом ультразвуковых преобразователей, двигатель, при работе которого происходит шарнирное движение, и шарнир, расположенный между корпусом катетера и отклоняющимся элементом. В одном подходе катетер может включать в себя замкнутый объем. Первый участок первого элемента электрического соединения может быть расположен в виде часовой пружины. Отклоняющийся элемент может содержать дистальный конец и проксимальный конец, и массив ультразвуковых преобразователей может быть расположен ближе к дистальному концу, чем первый участок первого элемента электрического соединения, и двигатель может во время работы шарнирно поворачивать массив ультразвуковых преобразователей, по меньшей мере, приблизительно на 360°. Внутри закрытого объема может быть помещена жидкость. Срединная линия первого участка первого элемента электрического соединения может быть расположена в пределах одной плоскости, которая может быть расположена перпендикулярно оси шарнира.
В одном аспекте катетер может включать в себя корпус катетера, отклоняющийся элемент, массив ультразвуковых преобразователей и первый элемент электрического соединения. Корпус катетера может включать в себя проксимальный конец и дистальный конец. Отклоняющийся элемент может быть размещен с возможностью опоры на дистальном конце корпуса катетера и может иметь участок, имеющий первый объем. Отклоняющийся элемент может отклоняться относительно продольной оси корпуса катетера на дистальном конце. Массив ультразвуковых преобразователей может быть установлен с возможностью шарнирного поворота оси шарнира в пределах первого объема. Первый элемент электрического соединения может иметь первый участок, намотанный в виде витков в пределах первого объема и электрически соединенный с массивом ультразвуковых преобразователей. В варианте осуществления, после шарнирного поворота, первый участок в виде витков первого элемента электрического соединения может быть сжат или может быть ослаблен (например, диаметр первого участка в виде витков может уменьшаться или увеличиваться во время шарнирного движения). Первый участок в виде витков может быть выполнен таким образом, чтобы шарнирный поворот в любом направлении (например, сжатие или в ослабление) относительно заданного положения требовал бы приложения усилия для преодоления сопротивления такому шарнирному повороту со стороны первого участка в виде витков. Первый элемент электрического соединения может иметь форму полоски и содержать множество проводников, расположенных с размещением электроизолирующего материала между ними.
В аспекте катетер может включать в себя отклоняющийся элемент, имеющий участок, имеющий замкнутый объем, с жидкостью, помещенной внутри этого замкнутого объема, массив ультразвуковых преобразователей, первый элемент электрического соединения и шарнир. Массив ультразвуковых преобразователей может быть расположен с возможностью возвратно-качательного движения в пределах замкнутого объема. Первый элемент электрического соединения может иметь, по меньшей мере, участок, спирально расположенный внутри замкнутого объема и фиксированно взаимно соединенный с массивом ультразвуковых преобразователей. После возвратно-качательного движения, спирально установленный участок может быть сжат и может быть ослаблен вдоль его длины. Шарнир может быть расположен между отклоняющимся элементом и корпусом катетера.
В компоновке катетер может включать в себя корпус катетера, отклоняющийся элемент, имеющий участок, имеющий замкнутый объем, жидкость, помещенную внутри замкнутого объема, шарнир и элемент захвата пузырьков. Шарнир может быть расположен между отклоняющимся элементом и корпусом катетера. Элемент захвата пузырьков может быть фиксированно установлен внутри замкнутого объема и может иметь вогнутую поверхность, обращенную к дистальному концу. Дистальный участок замкнутого объема может быть определен дистально к элементу захвата пузырьков, и проксимальный участок замкнутого объема может быть определен проксимально к элементу для захвата пузырьков. Отверстие может быть предусмотрено через элемент захвата пузырьков для соединения по текучей среде от дистального участка замкнутого объема к проксимальному участку замкнутого объема.
В другой компоновке катетер может включать в себя отклоняющийся элемент, имеющий участок, имеющий замкнутый объем, жидкость расположена внутри замкнутого объема, массив ультразвуковых преобразователей может быть расположен с возможностью движения в пределах замкнутого объема, шарнир и элемент сильфона. Элемент сильфона может иметь гибкий участок закрытого конца, расположенный в жидкости, которая помещена внутри замкнутого объема, и открытый участок, изолированный от жидкости. Элемент сильфона может сжиматься и расширяться в соответствии с изменениями объема жидкости.
В еще одной компоновке способ работы катетера может включать в себя: перемещают корпус катетера внутри естественного или по-другому сформированного канала в теле пациента, управляя дистальным концом корпуса катетера, до требуемого положения, избирательно отклоняют отклоняющийся элемент, шарнирно соединенный с дистальным концом корпуса катетера, на один или несколько углов относительно корпуса катетера, так, что дистальный конец корпуса катетера удерживается в требуемом положении, и включают двигатель отклоняющегося элемента, для обеспечения движения массива ультразвуковых преобразователей, для получения, по меньшей мере, двух уникальных 2-D изображений (то есть, изображений, получаемых с помощью массива ультразвуковых преобразователей в двух разных ориентациях). Избирательное отклонение может быть достигнуто с помощью устройства активации, которое выполнено с возможностью избирательного отклонения отклоняющегося элемента. В одном подходе этап избирательного отклонения может быть выполнен внутри объема, имеющего поперечный размер приблизительно 3 см или меньше.
В одном аспекте способ работы катетера, который включает в себя корпус катетера, может включать этапы, на которых: перемещают катетер через канал внутри тела пациенте до требуемого положения таким образом, что, дистальный конец корпуса катетера помещается в первое положение. Корпус катетера может иметь, по меньшей мере, один независимо управляемый участок и отклоняющийся элемент, расположенный с возможностью опоры на дистальном конце корпуса катетера. Способ может дополнительно включать в себя: отклоняют отклоняющийся элемент в требуемое угловое положение в пределах диапазона углов обзора относительно дистального конца корпуса катетера так, что дистальный конец поддерживают в первом положении. Способ может дополнительно включать в себя работу двигателя, установленного с опорой на отклоняющемся элемент так, что отклоняющийся элемент находится в требуемом угловом положении, для перемещения с приводом массива ультразвуковых преобразователей, установленных с опорой на отклоняющемся элементе. В варианте осуществления способ может дополнительно включать в себя управление корпусом катетера с помощью прогиба вдоль его длины. Этап отклонения может включать деформирование шарнира (который взаимно соединяет дистальный конец корпуса катетера и отклоняющийся элемент) из первой конфигурации во вторую конфигурацию. В варианте осуществления способ может дополнительно включать в себя перемещение вперед или вывод обратно устройства или материала через отверстие на дистальном конце корпуса катетера и в объем формирования изображения массива ультразвуковых преобразователей во время этапа выполнения операции.
Отклоняющийся элемент может иметь закругленный профиль поперечного сечения. Отклоняющийся элемент может включать в себя замкнутый объем и герметизируемый отверстие. В одном аспекте отклоняющийся элемент может включать в себя, по меньшей мере, одно герметизируемое отверстие заполнения жидкостью, которое позволяет заполнять замкнутый объем жидкостью, например, такой, которая способствует акустической связи. Герметизируемое отверстие может использоваться для заполнения замкнутого объема отклоняющегося элемента жидкостью, и затем оно может быть герметизировано. Заполнение замкнутого объема через герметизируемое отверстие может быть обеспечено путем временной вставки иглы шприца. По меньшей мере, одно дополнительное герметизируемое отверстие может быть включено в состав для выпуска замкнутого воздуха во время этапа заполнения жидкостью.
В одном варианте осуществления изобретения отклоняющийся элемент может включать в себя двигатель, расположенный внутри замкнутого объема и функционально взаимно соединенный с устройством формирования изображения, например, массивом ультразвуковых преобразователей. Двигатель осуществляет привода массива так, что он выполняет возвратно-качательное шарнирное движение.
В одном варианте осуществления изобретения отклоняющийся элемент может включать в себя участок, имеющий замкнутый объем и массив ультразвуковых преобразователей, расположенный внутри замкнутого объема. В некоторых вариантах осуществления отклоняющийся элемент может дополнительно включать в себя жидкость (например, жидкость), расположенную внутри замкнутого объема. В таких вариантах осуществления массив ультразвуковых преобразователей может быть окружен жидкостью, которая способствует акустической связи. В некоторых вариантах осуществления массив ультразвуковых преобразователей может быть установлен с возможностью возвратно-качательного шарнирного движения внутри замкнутого объема, формируя, таким образом, трехмерные изображения внутренней анатомии тела.
В одном аспекте отклоняющийся элемент может включать в себя элемент сильфона, имеющий гибкий участок с закрытым концом, расположенный внутри жидкости в замкнутом объеме, и открытый конец, изолированный от жидкости, в котором элемент сильфона может сжиматься и может расширяться в соответствии с изменениями объема жидкости. Следует понимать, что наличие элемента сильфона позволяет поддерживать функциональную целостность отклоняющегося элемента, когда на него воздействуют условия, которые могут привести к изменениям объема содержащейся жидкости.
По меньшей мере, участок закрытого конца элемента сильфона может упруго деформироваться. При этом участок закрытого конца элемента сильфона может упруго расширяться в соответствии с изменениями объема жидкости. Элемент сильфона может во время работы поддерживать функциональную целостность изменяющегося элемента, несмотря на изменения объема жидкости, которые могут возникать, из-за воздействия на отклоняющийся элемент относительно теплой или холодной температуры во время, например, транспортирования и/или хранения. Такой упруго расширяемый элемент сильфона может быть особенно предпочтительным с учетом низких температур, при которых жидкость обычно сжимается в большей степени, чем отклоняющийся элемент.
В другом аспекте отклоняющийся элемент может включать в себя элемент улавливателя пузырьков, фиксировано установленный относительно замкнутого объема, и жидкость, расположенную внутри замкнутого объем. Элемент улавливателя пузырьков может иметь вогнутую поверхность, обращенную к дистальному концу, в котором дистальный участок замкнутого объема определен дистальным для элемента улавливателя пузырьков, и проксимальный участок замкнутого объема определен проксимальным для элемента улавливателя пузырьков. Массив ультразвуковых преобразователей может быть расположен на дистальном участке, и отверстие может быть выполнено через элемент улавливателя пузырьков для соединения по жидкости дистального участка замкнутого объема с проксимальным участком замкнутого объема.
Как можно видеть, пузырьки, присутствующие в содержащейся жидкости, могут негативно влиять на изображения, получаемые массивом ультразвуковых преобразователей, и являются нежелательными. В описанной компоновке отклоняющийся элемент может быть ориентирован проксимальным концом вверх, в котором пузырьки могут направляться вогнутой поверхностью через отверстие улавливателя пузырьков, и эффективно изолироваться от массива ультразвуковых преобразователей, благодаря тому, что пузырьки захватываются на проксимальном участке замкнутого объема с помощью улавливателя пузырьков. В другом способе управления местоположением пузырьков пользователь может захватывать рукой катетер в точке, проксимальной замкнутому объему, и качать этот участок с замкнутым объемом для придания центробежной силы жидкости внутри замкнутого объема, заставляя, таким образом, жидкость перемещаться в направлении дистального конца и перемещать любые пузырьки, находящиеся в пределах жидкости, в направлении проксимального участка замкнутого объема.
В одной компоновке в отверстии может быть установлен фильтр. Фильтр может быть выполнен таким образом, что воздух может проходить через отверстие, в то время как жидкость не может проходить через отверстие. Фильтр может включать в себя расширенный политетрафторэтилен (ePTFE).
В одном варианте осуществления изобретения массив ультразвуковых преобразователей может быть установлен с возможностью выполнения возвратно-качательных шарнирных движений внутри замкнутого объема, и зазор между массивом ультразвуковых преобразователей и внутренней стенкой замкнутого объема может иметь такие размеры, что жидкость будет втягиваться в зазор, благодаря капиллярным силам. Для получения такого зазора, массив ультразвуковых преобразователей может включать в себя цилиндрический корпус, расположенный вокруг массива, и зазор может присутствовать между внешним диаметром цилиндрического корпуса и внутренней стенкой замкнутого объема.
В одном аспекте отклоняющийся элемент может включать в себя катетер, имеющий участок, имеющий замкнутый объем, устройство формирования изображения, такое как массив ультразвуковых преобразователей, расположенный с возможностью выполнения возвратно-качательного шарнирного движения вокруг оси шарнира внутри замкнутого объема, и элемент электрического соединения, имеющий первый участок, (например, намотанный в виде витков в одной плоскости в виде компоновки часовой пружины, намотанной вокруг оси в виде спирали) в пределах замкнутого объема и электрически соединенный с устройством формирования изображения. В одной компоновке первый участок элемента электрического соединения может быть расположен, как спираль, внутри замкнутого объема вокруг оси спирали. Поскольку устройство формирования изображения поворачивается, намотанный, как спираль, первый участок может быть сжат и может быть ослаблен вокруг оси спирали. Ось шарнирного поворота может совпадать с осью спирали. Замкнутый объем может быть расположен на дистальном конце отклоняющего элемента. Жидкость может быть размещена внутри замкнутого объема.
В другом дополнительном аспекте, устройство формирования изображения, например массив ультразвуковых преобразователей может быть расположен с возможностью возвратно-качательного движения вокруг оси шарнира внутри замкнутого объема. Отклоняющийся элемент может дополнительно включать в себя, по меньшей мере, первый элемент электрического соединения (например, для передачи сигналов формирования изображения в/из устройства формирования изображения). Первый элемент электрического соединения может включать в себя первый участок, намотанный в виде витков вокруг оси шарнира и взаимно соединенный с массивом ультразвуковых преобразователей.
В одном варианте осуществления изобретения первый элемент электрического соединения может включать в себя второй участок, примыкающий к первому участку, в котором второй участок фиксированно расположен относительно корпуса катетера, и в котором после возвратно-качательного движения устройства формирования изображения, намотанный в виде витков, первый участок первого элемента электрического соединения стягивается и ослабляется вокруг оси шарнирного поворота. Второй участок первого элемента электрического соединения может быть намотан, как спираль, и фиксированно установлен вокруг элемента внутреннего сердечника, расположенного внутри корпуса катетера.
В одном подходе первый элемент электрического соединения может быть выполнен в форме полоски и может содержать множество проводников, расположенных рядом друг с другом так, что электроизолирующий материал располагается между ними по ширине элемента. В качестве примера первый элемент электрического соединения может содержать GORE™ Micro-Miniature Ribbon Cable, поставляемый компанией WL Gore & Associates, Newark, DE, U.S.A. в котором первый участок первого элемента электрического соединения может быть расположен таким образом, что верхняя или нижняя его сторона обращена и обернута вокруг оси шарнирного поворота массива ультразвуковых преобразователей.
В другом варианте осуществления изобретения первый участок элемента электрического соединения может быть намотан в виде витков множество раз вокруг оси шарнирного поворота. Более конкретно, первый участок первого элемента электрического соединения может быть расположен в виде спирали вокруг оси шарнирного поворота с множеством витков. В одном варианте первый элемент электрического соединения может быть расположен, как спираль, вокруг оси поворота, без наложения, то есть, когда ни один из участков первого элемента электрического соединения не наложен на другой его участок.
В другом варианте первый элемент электрического соединения может быть выполнен в виде полоски и может быть расположен в виде спирали вокруг оси шарнирного поворота с множеством витков. При возвратно-качательном шарнирном движении массива ультразвуковых преобразователей, намотанный в виде спирали участок в форме полоски может стягиваться и ослабляться вокруг оси спирали. Отклоняющийся элемент может дополнительно включать в себя двигатель, который во время работы обеспечивает возвратно-качательное шарнирное движение. Гибкая плата может быть электрически соединена с устройством формирования изображения, и гибкая плата может быть электрически соединена с первым элементом электрического соединения в местоположении между двигателем и внешней стенкой катетера. Взаимное соединение между гибкой платой и первым элементом электрического соединения может поддерживаться цилиндрическим держателем соединения.
Отклоняющийся элемент может быть выполнен таким образом, что устройство формирования изображения будет расположено дистально вдоль отклоняющегося элемента относительно первого участка первого элемента электрического соединения. В альтернативной компоновке отклоняющийся элемент может быть выполнен таким образом, что первый участок первого электрического элемента соединения будет расположен дистально относительно устройства формирования изображения. В такой альтернативной компоновке участок первого элемента электрического соединения может быть установлен относительно корпуса кончика отклоняющегося элемента, где первый элемент электрического соединения продолжается до устройства формирования изображения. В любой компоновке первый участок может быть намотан в виде витков внутри замкнутого объема.
В одной компоновке отклоняющийся элемент может включать в себя приводной вал, функционально соединенный с устройством формирования изображения. Приводной вал может функционально приводить в движение устройство формирования изображения для выполнения им возвратно-качательного движения. Приводной вал может продолжаться от проксимального конца отклоняющегося элемента до устройства формирования изображения. Приводной вал может приводиться в движение от двигателя.
В одном варианте осуществления изобретения первый участок первого элемента электрического соединения может быть расположен в компоновке пружины для часов. Центральная линия первого участка первого элемента электрического соединения может быть расположена в пределах одной плоскости, которая, в свою очередь, расположена перпендикулярно оси поворота. Отклоняющийся элемент включает в себя дистальный конец и проксимальный конец, и в одной компоновке, первый участок (пружина для часов) может быть расположен ближе к дистальному концу отклоняющегося элемента, чем устройство формирования изображения. Первый участок может содержать гибкую плату.
В одном аспекте катетер может включать в себя отклоняющийся элемент, устройство формирования изображения и, по меньшей мере, первый элемент электрического соединения. Отклоняющийся элемент может иметь участок, имеющий первый объем, который может быть открыт в окружающую среду, который окружает, по меньшей мере, участок отклоняющегося элемента. Устройство формирования изображения может быть расположено с возможностью выполнения им возвратно-качательного шарнирного движения вокруг оси шарнира в пределах первого объема. В этом отношении, устройство формирования изображения может быть подвергнуто воздействию жидкости (например, крови), присутствующей в окружающей среде, окружающей отклоняющийся элемент. Первый элемент электрического соединения может иметь первый участок, намотанный, как катушка, в пределах первого объема и электрически соединенный с устройством формирования изображения. В одном варианте осуществления изобретения первый участок первого элемента электрического соединения может быть спирально расположен в первом объеме, будучи намотанным вокруг оси спирали. Первый элемент электрического соединения может дополнительно включать в себя второй участок, примыкающий к первому участку. Второй участок может быть фиксировано установлен относительно корпуса, частично окружающего первый объем. При выполнении возвратно-качательного шарнирного движения, намотанный, как катушка, первый участок первого элемента электрического соединения может стягиваться и ослабевать. Первый элемент электрического соединения может иметь форму полоски и может включать в себя множество проводников, расположенных рядом друг с другом с электроизолирующим материалом между ними. Первый участок первого элемента электрического соединения может быть расположен в компоновке пружины для часов. Компоновка пружины для часов может быть размещена в пределах первого объема, который может быть подвергнут воздействию окружающей среды, окружающей, по меньшей мере, участок отклоняющегося элемента. Структура может окружать устройство формирования изображения. Например, структура, пропускающая акустические сигналы, выполненная с возможностью фокусирования, дефокусирования или передачи без изменения, акустической энергии, может полностью или частично окружать массив ультразвуковых преобразователей. Эта структура может иметь круглый профиль в поперечном сечении. Такой профиль, в частности, если он закруглен, может уменьшать турбулентность окружающей крови, снижать повреждение окружающих кровяных клеток, и помогать исключать формирование тромба, в то время как устройство формирования изображения выполняет возвратно-качательное шарнирное движение.
В другом аспекте предусмотрен способ работы катетера, имеющего отклоняющееся устройство формирования изображения, расположенное на его дистальном конце.
Отклоняющееся устройство формирования изображения может быть выполнено в виде отклоняющегося элемента, который включает в себя компоненты для генерирования изображений. Способ может включать в себя перемещение дистального конца катетера от исходного положения в требуемое положения и получения данных изображения из отклоняющегося устройства формирования изображения, по меньшей мере, на протяженности части этапа передвижения. Отклоняющееся устройство формирования изображения может быть расположено в первом положении во время этапа передвижения. Передвижение в требуемое положение может включать в себя использование элемента управления в катетере для направления ориентации катетера внутри анатомии. Способ может дополнительно включать в себя: использование данных изображения для определения, когда катетер расположен в требуемом положении, отклонение отклоняющегося устройства формирования изображения относительно дистального конца катетера из первого положения во второе положение после этапа передвижения; и, в случае необходимости, подачу интервенционного устройства через дополнительное отверстие на дистальном конце катетера и в поле формирования изображения отклоняющегося устройства для формирования изображения во втором положении.
В одной компоновке этап отклонения может дополнительно включать в себя перемещение проксимального конца, по меньшей мере, одного из внешнего трубчатого корпуса катетера и устройства активации катетера относительно проксимального конца другого одного из внешнего трубчатого корпуса и устройства активации.
Сила отклонения может быть приложена к шарниру в соответствии с этапом перемещения. Отклоняющееся устройство формирования изображения может быть взаимно соединено с возможностью опоры с первым шарниром на одном из корпуса катетера и устройства активации. Сила отклонения может быть инициирована в соответствии с этапом перемещения. Сила отклонения может быть передана сбалансированно и распределенно вокруг центральной оси внешнего трубчатого корпуса. Передача силы отклонения, таким образом, может уменьшить нежелательный изгиб и/или прогиб катетера.
В компоновке положение отклоняющегося устройства формирования изображения может поддерживаться относительно дистального конца катетера во время этапов перемещения и получения. В одном варианте осуществления изобретения отклоняющееся устройство формирования изображения может выполнять боковой обзор в первом положении и выполнять обзор вперед или обзор назад во втором положении. В одном варианте осуществления изобретения поле формирования изображения может поддерживаться, по существу, в фиксированном совмещении относительно дистального конца катетера во время этапа подачи.
В следующих аспектах описываются катетеры, включающие в себя отклоняющийся элемент. Хотя это не указано, такие отклоняющиеся элементы могут включать в себя двигатели для избирательного привода в движение компонента или компонентов внутри отклоняющегося элемента. Например, когда это необходимо, отклоняющиеся элементы, описанные ниже, каждый могут включать в себя двигатель для избирательного привода в движение массивов ультразвуковых преобразователей.
В дополнительном аспекте, по меньшей мере, участок отклоняющегося элемента может быть постоянно установлен за пределами внешнего трубчатого корпуса. В этом отношении, отклоняющийся элемент может избирательно отклоняться от центральной оси внешнего трубчатого корпуса. В определенных вариантах осуществления изобретения такое отклонение может быть, по меньшей мере, частично или полностью дистальным относительно дистального конца внешнего трубчатого корпуса.
В одном аспекте катетер также может включать в себя канал для транспортирования устройства и/или материала, например, для подачи хирургического устройства, продолжающегося через внешний трубчатый корпус от проксимального конца внешнего трубчатого корпуса до точки, дистальной к нему. С этой целью, "хирургическое устройство" включает в себя, без ограничений, диагностические устройства (например, преобразователи давления, устройства измерения проводимости, устройства измерения температуры, устройства измерения расхода жидкости, устройства отображения электро- и нейрофизиологии, устройства детектирования материала, устройства формирования изображения, устройства отслеживания центрального венозного давления (CVP), катетеры внутрисердечной эхокардиографии (ICE), катетеры для установления размеров баллонов, иглы, инструменты для биопсии), терапевтические устройства (например, катетеры для абляции (например, радиочастотные, ультразвуковые, оптические), устройства, закрывающие открытые овальные окна (PFO), катетеры для криотерапии, фильтры полой вены, стенты, стенты-трансплантаты, инструменты для септостомии) и устройства подачи агента (например, иглы, канюли, катетеры, удлиненные элементы). С этой целью, "агент" включает в себя без ограничений терапевтические агенты, фармацевтические средства, химические соединения, биологические соединения, генетические материалы, красители, соль и контрастные агенты. Агент может быть жидким, гелеобразным, твердым или иметь любую другую соответствующую форму. Кроме того, канал может использоваться для подачи через него агентов без использования интервенционного устройства. Объединенное включение отклоняющегося элемента и канала для транспортирования устройства и/или материала через него способствует обеспечению многофункциональности катетера. Это является предпочтительным, поскольку снижает количество катетеров и мест доступа, требуемых во время процедуры, обеспечивает потенциал для ограничения времени интервенционной процедуры, и улучшает простоту использования.
В этом отношении, в некоторых вариантах осуществления изобретения канал может быть определен внутренней поверхностью стенки внешнего трубчатого корпуса. В других вариантах осуществления изобретения канал может быть определен внутренней поверхностью внутреннего трубчатого корпуса, расположенного внутри внешнего трубчатого корпуса и продолжающегося от проксимального конца до дистального его конца.
В другом аспекте отклоняющийся элемент может быть избирательно отклоняющимся по дуге, по меньшей мере, приблизительно 45°, и в различных вариантах осуществления изобретения, по меньшей мере, приблизительно 90°, и в других вариантах осуществления изобретения по дуге, по меньшей мере, приблизительно 180°, приблизительно 200°, приблизительно 260° или приблизительно 270°. Например, отклоняющийся элемент может шарнирно отклоняться вокруг оси поворота или оси шарнира по дуге, по меньшей мере, приблизительно 90° или, по меньшей мере, приблизительно 200°. Кроме того, отклоняющийся элемент может избирательно отклоняться и может удерживаться во множестве положений в диапазоне разных угловых положений. Такие варианты осуществления изобретения особенно пригодны для воплощения отклоняющегося элемента, содержащего устройство формирования изображения.
В определенных вариантах осуществления изобретения отклоняющийся элемент в форме отклоняющего устройства формирования изображения может избирательно отклоняться из открытого (например, в случае, когда, по меньшей мере, для участка отверстия отклоняющегося устройства формирования изображения не возникают помехи от внешнего трубчатого корпуса) первого положения бокового обзора до открытого второго положения с обзором вперед. Используемый здесь термин "боковой обзор" определен, как положение отклоняющегося устройства формирования изображения, в котором поле обзора отклоняющегося устройства формирования изображения ориентировано, по существу, перпендикулярно дистальному концу центральной оси внешнего трубчатого корпуса, то есть, центральной оси. Термин "обзор вперед" включает в себя, в случае, когда поле обзора отклоняющегося устройства формирования изображения, по меньшей мере, частично отклонено так, что обеспечивается возможность формирования изображения объема, который включает в себя области, дистальные для дистального конца катетера. Например, отклоняющееся устройство формирования изображения (например, массив ультразвуковых преобразователей) может быть выровнено с (например, расположено параллельно к или коаксиально с) центральной осью внешнего трубчатого корпуса в первом положении. Такой подход способствует вводу в сосуд или полость тела и формированию изображений анатомических ориентиров во время установки катетера (например, во время вставки и продвижения вперед катетера в сосудистый канал или полость тела), при котором могут использоваться изображения анатомического ориентира для точного установления положения отверстия канала, содержащегося в катетере. В свою очередь, массив ультразвуковых преобразователей может быть отклонен от первого положения с боковым обзором во второе положение с обзором вперед (например, под углом, по меньшей мере, приблизительно 45°, или в некоторых вариантах применения, по меньшей мере, приблизительно 90°) относительно центральной оси катетера. Интервенционное устройство может затем быть избирательно продвинуто через канал катетера, и в рабочую область, расположенную рядом с отверстием канала и внутри поля обзора формирования изображения массива ультразвуковых преобразователей, в котором внутренние процедуры, изображения которых формируются, могут быть закончены с использованием интервенционного устройства с формированием изображений, с использованием только массива ультразвуковых преобразователей или в комбинации с другими способами формирования изображений (например, флюороскопии). Отклоняющееся устройство формирования изображения может отклоняться таким образом, что ни одна часть отклоняющегося устройства формирования изображения не будет занимать объем с таким же поперечным сечением, как и отверстие, и может продолжаться дистально от отверстия. При этом поле обзора формирования изображения от применяющегося устройства формирования изображения может поддерживаться в фиксированном сопоставлении с внешнем трубчатым корпусом, в то время как интервенционное устройство продвигают через внешний трубчатый корпус, через отверстие и в поле обзора формирования изображения отклоняющегося устройства формирования изображения.
В определенных вариантах осуществления изобретения отклоняющееся устройство формирования изображения может избирательно отклоняться из первого положения бокового обзора во второе положение обзора назад. Термин "обзор назад" включает в себя случай, когда поле обзора формирования изображения отклоняющегося устройства формирования изображения, по меньшей мере, частично отклоняется так, что обеспечивается возможность формирования изображения объема, который включает в себя области, распложенные проксимально дистальному концу катетера.
В других вариантах осуществления изобретения отклоняющееся устройство формирования изображения может избирательно отклоняться от первого положения бокового обзора в различные выбранные положения обзора вперед, бокового обзора и обзора назад, обеспечивая, таким образом, возможность получения множества планов или объемов формирования изображений в пределах анатомии пациента, предпочтительно, поддерживая относительно фиксированное или стабильное положение катетера. Массив ультразвуковых преобразователей может быть выполнен с возможностью получения информации объемного формирования изображений и цветов потоков, в которой центральный луч объема может быть перенаправлен при таком отклонении преобразователя. Это особенно предпочтительно для вариантов осуществления изобретения, обеспечивающих возможность получения в режиме реального времени последовательных трехмерных изображений, используя отклоняющееся устройство формирования изображения в виде колебательного одномерного массива или неподвижного двумерного массива. В таких вариантах осуществления изобретения угол ориентации массива ультразвуковых преобразователей и отклоняющегося элемента, относительно продольной оси корпуса катетера может представлять собой любой угол в пределах от приблизительно +180° до приблизительно -180° или угол дуги, составляющий, по меньшей мере, приблизительно 180°, приблизительно 200°, приблизительно 260° или приблизительно 270°. Рассматриваемые углы включают в себя приблизительно +180°, +170°, +160°, +150°, +140°, +130°, +120°, +110°, +100°, +90°, +80°, +70°, +60°, +50°, +40°, +30°, +20°, +10°, 0°, -10°, -20°, -30°, -40°, -50°, -60°, -70°, -80°, -90°, -100°, -110°, -120°, -130°, -140°, -150°, -160°, -170° и -180° или могут выходить за пределы любых двух из этих величин.
В родственном аспекте отклоняющийся элемент может содержать массив ультразвуковых преобразователей, имеющих длину отверстия, по меньшей мере, такую же, как максимальный поперечный размер внешнего трубчатого корпуса. В соответствии с этим, отклоняющийся массив ультразвуковых преобразователей может быть предусмотрен с возможностью избирательного отклонения из первого положения, в котором обеспечивается возможность продвижения катетера через канал сосуда, во второе положение, которое расположено под углом относительно первого положения. И снова, в определенных вариантах осуществления изобретения второе положение может быть избирательно установлено пользователем.
В родственном аспекте отклоняющийся элемент может отклоняться от первого положения, выровненного с центральной осью катетера (например, параллельно ей) во второе положение, расположенное под углом относительно центральной оси, в котором, во втором положении отклоняющийся элемент располагается за пределами рабочей области, размещенной рядом с отверстием канала. При этом, интервенционное устройство может быть продвинуто через отверстие, без каких-либо помех со стороны отклоняющегося элемента.
В определенных вариантах осуществления изобретения отклоняющийся элемент может быть предусмотрен таким образом, что его конфигурация в поперечном сечении, в общем, совпадает с конфигурацией поперечного сечения внешнего трубчатого корпуса на его дистальном конце. Например, когда используется внешний трубчатый корпус цилиндрической формы, отклоняющийся элемент может быть расположен за пределами дистального конца внешнего трубчатого корпуса и выполнен таким образом, чтобы он совпадал с (например, незначительно превышал, занимал или попадал в) воображаемым цилиндрическим объемом, определенным таким дистальным концом и расположенным рядом с этим дистальным концом, в котором отклоняющийся элемент может избирательно отклоняться за пределы такого объема. Такой подход способствует исходному продвижению и установлению положения катетера через каналы сосуда.
В определенных вариантах осуществления изобретения отклоняющийся элемент может быть предусмотрен с возможностью отклонения вдоль дуговой траектории, которая продолжается за пределы центральной оси внешнего трубчатого корпуса. В качестве примера, в различных вариантах осуществления изобретения отклоняющийся элемент может быть выполнен с возможностью отклоняться от первого положения, которое расположено дистально отверстию канала, во второе положение, которое расположено поперечно внешнему трубчатому корпусу (например, одной стороне внешнего трубчатого корпуса).
В другом аспекте отклоняющийся элемент может быть выполнен с возможностью отклоняться от продольной оси, например, центральной оси катетера. После отклонения на 90° от продольной оси, определяют дугу смещения. Дуга смешения представляет собой минимальную дугу с постоянным радиусом, которая расположена по касательной к стороне отклоняющегося элемента и расположена по касательной к прямой линии, которая является коллинеарной с центральной осью катетера в самой дистальной точке катетера. Дуга смешения, ассоциированная с определенным вариантом осуществления отклоняющегося элемента, может использоваться для сравнения рабочих характеристик отклонения в этом конкретном варианте осуществления изобретения с другими вариантами осуществления отклоняющего элемента и с минимальным радиусом изгиба управляемого катетера (в случаях, когда положение жесткого кончика устанавливают только с использованием обычного управления). В одном аспекте радиус дуги смешения может быть меньше чем приблизительно 1 см. В другом аспекте может быть предусмотрен отклоняющийся элемент, в котором отношение максимального перекрестного размера дистального конца внешнего трубчатого корпуса к радиусу дуги смещения составляет, по меньшей мере, приблизительно 1. В качестве примера, для цилиндрического внешнего трубчатого корпуса, отношение может быть определено внешним диаметром дистального конца внешнего трубчатого корпуса к радиусу дуги смещения, в котором такое отношение предпочтительно может быть установлено равным, по меньшей мере, приблизительно 1.
В одном аспекте может быть предусмотрен катетер с отклоняющимся элементом, где отклоняющийся элемент может отклоняться от продольной оси, и где после отклонения на 90° от продольной оси, определяется область, в которой происходит отклонение. Область, в которой происходит отклонение, представляет собой область вдоль длины катетера, в которой кривизна или другое изменение вводятся для получения отклонений на 90°. В случае идеального шарнира, область, в которой происходит отклонение, может представлять собой точку. В случае пленочного шарнира, область, в которой происходит отклонение, приближается к точке. В определенных вариантах осуществления изобретения область, в которой происходит отклонение, может быть меньше, чем максимальный размер поперечного сечения корпуса катетера.
В другом аспекте отклоняющийся элемент может быть взаимно соединен со стенкой корпуса катетера на дистальном конце внешнего трубчатого корпуса. Как будет описано дополнительно ниже, такое взаимное соединение может обеспечивать функцию опоры и/или функцию избирательного отклонения. В последнем отношении отклоняющийся элемент может отклоняться вокруг оси отклонения, которая смещена от центральной оси внешнего трубчатого корпуса. Например, ось отклонения может лежать в плоскости, которая продолжается поперечно центральной оси внешнего трубчатого корпуса и/или в плоскости, которая продолжается параллельно центральной оси. В первом случае, в одном варианте осуществления изобретения, ось отклонения может находиться в плоскости, которая продолжается ортогонально центральной оси. В некоторых вариантах осуществления изобретения ось отклонения может находиться в плоскости, которая продолжается по касательной к отверстию канала, который продолжается через внешний трубчатый корпус катетера.
В еще одном, другом аспекте, катетер может содержать канал (например, для подачи интервенционного устройства), продолжающийся от проксимального конца к отверстию, расположенному на дистальном конце внешнего трубчатого корпуса, в котором отверстие имеет центральную ось, выровненную коаксиально с центральной осью внешнего трубчатого корпуса. Такое размещение способствует реализации относительно малых поперечных размеров катетера, улучшая, таким образом, возможность установки положения катетера (например, внутри малых и/или извилистых каналов сосудов). Отклоняющийся элемент может также быть установлен с возможностью отклонения от коаксиальных центральных осей, что, таким образом, способствует поперечной установке под углом от исходного положения введения катетера (например, 0°) отклоняющегося элемента. В некоторых вариантах осуществления изобретения отклоняющийся элемент может отклоняться по дуге, по меньшей мере, приблизительно 90° или, по меньшей мере, приблизительно 200°.
В дополнительном аспекте катетер может включать в себя устройство активации, продолжающееся от проксимального конца до дистального конца внешнего трубчатого корпуса, в котором устройство активации может быть взаимно соединено с отклоняющимся элементом. Устройство активации может, например, включать в себя баллоны, линии привязки, провода (например, вытяжные провода), стержни, планки, трубки, гипотрубки, тонкие зонды (включая в себя тонкие зонды с предварительно установленной формой), активируемые электричеством или теплом материалы с памятью формы, электроактивные материалы, текучие среды, постоянные магниты, электромагниты или любую их комбинацию. Устройство активации и внешний трубчатый корпус могут быть выполнены с возможностью относительного движения таким образом, что отклоняющийся элемент может отклоняться по дуге, по меньшей мере, приблизительно 45° в ответ на относительное движение 0,5 см или меньше между устройством активации и внешним трубчатым корпусом. В качестве примера, в определенных вариантах осуществления изобретения отклоняющийся элемент может отклоняться по дуге, по меньшей мере, приблизительно 90° в ответ на относительное движение 1,0 см или меньше устройства активации и внешнего трубчатого корпуса.
В дополнительном аспекте отклоняющийся элемент может быть взаимно соединен с внешним трубчатым корпусом. В одном подходе отклоняющийся элемент может быть взаимно соединен с возможностью удержания на внешнем трубчатом корпусе на его дистальном конце. В свою очередь, устройство активации, содержащее один или несколько удлиненных элементов (например, конструкции в виде провода), может быть расположено вдоль внешнего трубчатого корпуса и взаимно соединено на дистальном конце с отклоняющимся элементом, в котором после приложения силы растяжения или силы сжатия (например, силы вытягивания или силы проталкивания) к проксимальному концу удлиненного элемента (элементов), дистальный конец удлиненного элемента (элементов) может привести к отклонению отклоняющегося элемента. В таком варианте во внешнем трубчатом корпусе может быть сформирован канал (например, для подачи интервенционного устройство) продолжающийся от проксимального конца внешнего трубчатого корпуса до отверстия, расположенного дистально к проксимальному концу.
В другом варианте отклоняющийся элемент может быть взаимно соединен с возможностью опоры на одном из внешнего трубчатого корпуса и устройства активации, и ограниченно взаимно соединен ограничивающим элементом (например, лигатурой) с другим одним из внешнего трубчатого корпуса и устройства активации, в котором при относительном движении внешнего трубчатого корпуса и устройства активации ограничивающий элемент ограничивает движение отклоняющегося элемента, вызывая его отклонение.
Например, отклоняющийся элемент может быть взаимно соединен с возможностью опоры с устройством активации и взаимно соединен с ограничением с внешним трубчатым корпусом на его дистальном конце. При таком подходе устройство активации может содержать внутренний трубчатый корпус, в котором сформирован канал (например, для подачи интервенционного устройства), продолжающийся от проксимального конца корпуса катетера до отверстия, расположенного дистально от проксимального конца.
Более конкретно, и в дополнительном аспекте, катетер может содержать внутренний трубчатый корпус, расположенный в пределах внешнего трубчатого корпуса для относительного движения между ними (например, относительного скользящего движения). Отклоняющийся элемент, расположенный на дистальном конце, может быть взаимно соединен с возможностью опоры на внутреннем трубчатом корпусе. В определенных вариантах осуществления изобретения отклоняющийся элемент может быть расположен таким образом, что при избирательном относительном движении внешнего трубчатого корпуса и внутреннего трубчатого корпуса отклоняющийся элемент избирательно отклоняется и может поддерживаться в требуемой угловой ориентации.
Например, в одном варианте осуществления изобретения внутренний трубчатый корпус может со скольжением продвигаться вперед и втягиваться относительно внешнего трубчатого корпуса, в котором соединение между поверхностями этих двух компонентов обеспечивает стык для механизма, достаточный для поддержания выбранного взаимного положения этих двух компонентов и соответствующего отклоненного положения отклоняющегося элемента. Проксимальная ручка также может быть предусмотрена, которая может способствовать поддержанию выбранного относительного положения этих двух компонентов.
В дополнительном аспекте катетер может включать в себя устройство активации, продолжающееся от проксимального конца до дистального конца внешнего трубчатого корпуса и перемещаемое относительно внешнего трубчатого корпуса для приложения силы отклонения к отклоняющемуся элементу. В этом отношении, устройство активации может быть предусмотрено таким образом, что сила отклонения передается устройством активации от проксимального конца до дистального конца сбалансировано и с распределением вокруг центральной оси внешнего трубчатого корпуса. Как можно понимать, такое сбалансированное и распределенное усилие способствует реализации катетера без смещения, что способствует улучшению атрибутов управления и установке положения.
В одном варианте осуществления изобретения отклоняющийся элемент может работать от устройства активации для избирательной установки положения. В другом варианте осуществления изобретения операция устройства активации может быть независимой от управления корпусом катетера. В дополнительном варианте осуществления изобретения устройство активации может работать независимо от управления катетером и независимо от операции двигателя для привода в колебательное движение массива ультразвуковых преобразователей, как описано ниже.
В соответствии с одним или несколькими упомянутыми выше аспектами, катетер может включать в себя шарнир, который взаимно соединен с возможностью опоры на внешнем трубчатом корпусе или, в определенных вариантах осуществления изобретения, к включенному устройству активации (например, внутреннему трубчатому корпусу). Шарнир может быть структурно отдельным от и может быть фиксированно взаимно соединен с корпусом катетера (например, с внешним трубчатым корпусом или с внутренним трубчатым корпусом). Шарнир может быть дополнительно фиксированно взаимно соединен с отклоняющимся элементом, в котором отклоняющийся элемент может отклоняться в виде шарнирного поворота. В некоторых вариантах осуществления изобретения шарнир может быть построен из корпуса катетера (например, корпус катетера может иметь удаленный участок, и остающийся участок может использоваться, как шарнир). Элемент шарнира может быть, по меньшей мере, частично упруго деформируемым для деформации из его первой конфигурации в его вторую конфигурацию при приложении заданной силы активации, и, по меньшей мере, частично возвращаться из второй конфигурации в первую конфигурацию после прекращения действия заданной силы активации. Такая функция способствует предоставлению отклоняющегося элемента, который может быть избирательно активирован через устройство активации для перемещения из исходного первого положения в требуемое второе положение, после приложения заданной силы активации (например, силы растяжения или силы проталкивания, или сжимающей силы проталкивания, прикладываемой к нему), в котором после избирательного прекращения действия силы активации, отклоняющийся элемент может автоматически, по меньшей мере, частично отклоняться в его исходное первое положение. В свою очередь, последовательная установка положения при отклонении/отводе отклоняющегося элемента может быть реализована во время заданной процедуры, что придает улучшенную функциональность в различных клинических вариантах применения.
В некоторых вариантах осуществления изобретения шарнирный элемент может быть предусмотрен так, чтобы он имел прочность колонны, достаточную для уменьшения непреднамеренного отклонения отклоняющегося элемента во время размещения катетера (например, из-за механического сопротивления, связанного с продвижением катетера). В качестве примера, шарнирный элемент может проявлять прочность колонки, по меньшей мере, эквивалентную внешнему трубчатому корпусу.
В определенных вариантах осуществлении изобретения шарнир может представлять собой участок монолитного, интегрально определенного элемента. Например, шарнир может содержать материал с памятью формы (например, Нитинол). В одном подходе шарнирный элемент может включать в себя изогнутый первый участок и второй участок, взаимно соединенный с ним, в котором второй участок отклоняется вокруг оси отклонения, определенной изогнутым первым участком. В качестве примера, изогнутый первый участок может содержать поверхность цилиндрической формы. В одном варианте осуществления изобретения изогнутый первый участок может включать в себя две поверхности цилиндрической формы, имеющие соответствующие центральные оси, которые продолжаются в общей плоскости и пересекаются под углом, в котором мелкая конфигурация в виде седла определена двумя поверхностями цилиндрической формы. В одном варианте шарнирный элемент может включать в себя вертикальную ось. В другом варианте шарнирный элемент может включать в себя мембрану, которая может изгибаться таким образом, что отклоняющийся элемент будет работать с перемещением по заданной траектории, по меньшей мере, частично управляемой мембраны.
В еще одном дополнительном аспекте внешний трубчатый корпус может быть построен так, чтобы он способствовал включению в него электрических компонентов на его дистальном конце. Более конкретно, внешний трубчатый корпус может содержать множество взаимно соединенных электрических проводников, продолжающихся от проксимального конца к дистальному концу. Например, в определенных некоторых вариантах осуществления изобретения электрические проводники могут быть взаимно соединены в виде элемента в форме ленты, который спирально расположен вокруг и вдоль всей или, по меньшей мере, части центральной оси катетера, способствуя, таким образом, формированию улучшенных структурных качеств для стенки внешнего трубчатого корпуса и исключая чрезмерное растяжение электрических проводников во время отклонения внешнего трубчатого корпуса. Например, в определенных вариантах осуществления изобретения электрические проводники могут быть намотаны вдоль, по меньшей мере, участка центральной оси катетера, способствуя, таким образом, улучшенным структурным качествам стенки внешнего трубчатого корпуса. Внешний трубчатый корпус может дополнительно включать в себя первый слой, расположенный в первом множестве электрических проводников и продолжающийся от проксимального конца до дистального конца, и второй слой, расположенный снаружи от первого множества электрических проводников, продолжающихся от его проксимального конца к его дистальному концу. Первый трубчатый слой и второй трубчатый слой каждый может быть предусмотрен так, чтобы он имел диэлектрическую постоянную приблизительно 2,1 или меньше, в котором емкостная связь может быть предпочтительно уменьшена между множеством электрических проводников и жидкостями тела, присутствующими снаружи катетера и внутри канала, продолжающегося через внешний трубчатый корпус.
В еще одном аспекте катетер может включать в себя трубчатый корпус. Трубчатый корпус может включать в себя стенку с проксимальным концом и дистальным концом. Стенка может включать в себя первый и второй слои, продолжающиеся от проксимального конца до дистального конца. Второй слой может быть расположен за пределами первого слоя. Первый и второй слои каждый может выдерживать напряжение, по меньшей мере, приблизительно 2500 В переменного напряжения. Стенка может дополнительно включать в себя, по меньшей мере, один электрический проводник, продолжающийся от проксимального конца до дистального конца и расположенный между первым и вторым слоями. Канал может продолжаться через трубчатый корпус. В комбинации первый и второй слои могут обеспечивать сопротивление удлинению такому, как нагрузка на растяжение приблизительно 13 Н, которая приводит не более чем к 1-процентному удлинению трубчатого корпуса.
В одной компоновке трубчатый корпус может обеспечивать такое сопротивление удлинению, что нагрузка растяжения приблизительно 13 Н, приложенная к трубчатому корпусу, приводит не более чем к 1% удлинения трубчатого корпуса, и в такой компоновке, по меньшей мере, приблизительно 80% сопротивления удлинения могут обеспечиваться первым и вторым слоями.
В одном варианте осуществления изобретения первый и второй слои могут иметь комбинированную толщину не больше приблизительно 0,05 мм. Кроме того, первый и второй слои могут иметь комбинированный модуль упругости, по меньшей мере, 2379 МПа. Первый и второй слои могут проявлять, по существу, однородный профиль растяжения вокруг внешней окружности и вдоль длины трубчатого корпуса, когда нагрузка растяжения приложена к трубчатому корпусу. Первый и второй слои каждый может включать в себя спирально намотанный материал (например, пленку). Например, первый слой может включать в себя множество спирально намотанных пленок. Первый участок множества пленок может быть намотан в первом направлении, и второй участок пленок может быть намотан во втором направлении, которое противоположно первому направлению. Одна или несколько из множества пленок может включать в себя высокопрочную ориентированную пленку. Одна или несколько из множества пленок может включать в себя непористый фторполимер. Непористый фторполимер может содержать непористый ePTFE. Второй слой может быть построен аналогично первому слою. По меньшей мере, один электрический проводник может быть выполнен в форме множества проводящих полосок и/или проводящей тонкой пленки и может быть спирально намотан вдоль, по меньшей мере, участка трубчатого корпуса.
Следует понимать, что конструкция трубчатого корпуса в текущем аспекте может использоваться в других аспектах, описанных здесь, таких как, например, аспекты, где трубчатый корпус расположен в пределах другого трубчатого корпуса, и относительное движение между трубчатыми корпусами используется для отклонения отклоняющегося элемента.
В варианте осуществления текущего аспекта первый и второй слои могут иметь комбинированную толщину не больше приблизительно 0,25 мм. Кроме того, первый и второй слои могут иметь комбинированный модуль упругости, по меньшей мере, приблизительно 475,7 МПа. В настоящем варианте осуществления изобретения первый слой может содержать первый подслой первого слоя и второй подслой первого слоя. Первый подслой первого слоя расположен внутри второго подслоя первого слоя. Второй слой может содержать первый подслой второго слоя и второй подслой второго слоя. Первый подслой второго слоя расположен за пределами второго подслоя первого слоя. Первый подслой первого слоя и первый подслой второго слоя могут включать в себя первый тип спирально намотанной пленки. Второй подслой первого слоя и второй подслой второго слоя могут включать в себя второй тип спирально намотанной пленки. Первый тип спирально намотанной пленки может включать в себя непористый фторполимер, и второй тип спирально намотанной пленки может включать в себя пористый фторполимер.
В другом варианте осуществления изобретения первый слой может иметь толщину не больше приблизительно 0,025 мм, и второй слой может иметь толщину не больше приблизительно 0,13 мм. Кроме того, первый слой может иметь модуль упругости, по меньшей мере, приблизительно 1189 МПа, и второй слой может иметь модуль упругости, по меньшей мере, приблизительно 237,9 МПа.
В другом аспекте внешний трубчатый корпус может содержать множество электрических проводников, продолжающихся от проксимального конца до дистального конца, и набор трубчатых слоев внутри и/или снаружи первого множества электрических проводников. Набор трубчатых слоев может содержать слой с низкой диэлектрической постоянной (например, расположенный ближе всего к электрическим проводникам), и слой, выдерживающий высокое напряжение. В этом отношении, слой с низкой диэлектрической постоянной может иметь диэлектрическую постоянную 2,1 или меньше, и слой, который выдерживает высокое напряжение, может быть предусмотрен с тем, чтобы придать способность противостоять напряжению, по меньшей мере, приблизительно 2500 В переменного тока. В некоторых вариантах осуществления изобретения, набор из слоев с низким диэлектрическим значением и высоким напряжением пробоя, может быть предусмотрен, как внутри, так и снаружи множества электрических проводников вдоль длины внешнего трубчатого корпуса.
В определенных вариантах осуществления изобретения связующие слои могут быть расположены между электрическими проводниками и одним или несколькими внутренними и/или внешними слоями. В качестве примера такие связующие слои могут содержать пленочный материал, который может иметь температуру плавления ниже, чем у других компонентов внешнего трубчатого корпуса, в котором могут быть собраны отмеченные слои компонентов, и связующие слои могут быть избирательно расплавлены для получения взаимно соединенной структуры. Такие избирательно расплавленные связующие слои могут предотвращать миграцию других слоев внешнего трубчатого корпуса относительно друг друга во время манипуляции с внешним трубчатым корпусом (например, во время вставки в тело пациента).
Для некоторых компоновок внешний трубчатый корпус может дополнительно включать в себя экранирующий слой, расположенный снаружи электрических проводников. В качестве примера экранирующий слой может быть предусмотрен для уменьшения излучения электромагнитных помех (EMI) из катетера, а также в качестве экрана катетера от внешних EMI.
В некоторых вариантах осуществления изобретения также могут быть включены в состав внутренние и внешние слои и/или покрытия с хорошей смазываемостью. Таким образом, внутренний слой может быть расположен внутри первого трубчатого слоя, и внешний слой может быть расположен снаружи второго трубчатого слоя.
В еще одном дополнительном аспекте катетер может быть предусмотрен так, что он содержит первый участок электрического проводника, продолжающийся от проксимального конца до дистального конца катетера, и второй участок электрического проводника, электрически соединенный с первым участком электрического проводника на дистальном конце. Первый участок электрического проводника может содержать множество взаимно соединенных электрических проводников, расположенных рядом друг с другом, с электроизолирующим материалом между ними. В некоторых вариантах осуществления изобретения первый участок электрического проводника может быть спирально размещен вокруг центральной оси катетера от его проксимального конца до его дистального конца. В связи с такими вариантами осуществления изобретения, второй участок электрического проводника может содержать множество электрических проводников, взаимно соединенных с множеством взаимно соединенных электрических проводников первого участка электрического проводника, и продолжающийся параллельно от центральной оси внешнего трубчатого корпуса на дистальном конце. В некоторых вариантах осуществления изобретения первый участок электрического проводника может быть определен элементом в форме полоски, включенным в стенку внешнего трубчатого корпуса, что способствует его структурной целостности.
В связи с отмеченным аспектом первый участок электрического проводника может определять первую ширину взаимно соединенного множества электрических проводников, и второй участок электрического проводника может определять вторую ширину для соответствующего множества электрических проводников. В этом отношении, второй участок электрических проводников может быть определен электропроводными дорожками, расположенными на подложке. В качестве примера подложка может продолжаться между концом первого участка электрического проводника, и электрические компоненты могут быть предусмотрены на дистальном конце катетера, включая в себя, например, массив ультразвуковых преобразователей.
В различных вариантах осуществления изобретения второй участок электрических проводников может быть взаимно соединен с отклоняющимся элементом и может иметь гибкую конструкцию, в которой, по меньшей мере, участок второго участка электрического проводника может изгибаться с отклоняющимся элементом и в ответ на изгиб отклоняющегося элемента. Более конкретно, второй участок электрического проводника может быть определен электропроводными дорожками на подложке, которая может изгибаться вместе с отклоняющимся элементом по дуге, по меньшей мере, приблизительно 90°, 180°, 200°, 260° или 270°.
В дополнительном аспекте катетер может содержать отклоняющийся элемент, который включает в себя массив ультразвуковых преобразователей, в котором, по меньшей мере, участок отклоняющегося массива ультразвуковых преобразователей может быть расположен в пределах стенки внешнего трубчатого корпуса на дистальном конце. Кроме того, катетер может включать в себя средство управления, с помощью которого корпус катетера может направляться внутри анатомии в заданное местоположение внутри сердечной полости или для доступа к каналу сосуда. Также, кроме того, катетер может включать в себя канал (например, для подачи интервенционного устройство), продолжающегося от проксимального конца до его дистальной точки.
В еще одном аспекте катетер может содержать двигатель, который может обеспечивать колебательное или вращательное движение устройства формирования изображения, например, массива ультразвуковых преобразователей. Массив ультразвуковых преобразователей может быть расположен с возможностью возвратно-качательного шарнирного движения (то есть, с поворотом вперед и назад, а не непрерывного вращения по кругу вокруг, например, центральной оси корпуса катетера, или оси, параллельной ему, при этом двигатель работает для привода в движение. Используемый здесь термин "поворот" относится к колебательному или угловому движению или движению между выбранными +/- градусами углового диапазона. Колебательное или угловое движение включает в себя, но не ограничивается этим, частичное движение в направлении по часовой стрелке или в направлении против часовой стрелки, или движение между положительным и отрицательным диапазоном угловых градусов. Двигатель включает в себя микродвигатели, активаторы, микроактиваторы, такие как электромагнитные двигатели, включая в себя шаговый двигатель, индуктивный двигатель или синхронный двигатель (например, Faulhaber Series 0206 В available from MicroMo Electronics, Inc., Clearwater, FL, U.S.A.); механизмы активатора на основе материала с памятью формы, такие, как раскрыты в US 2007/0016063 авторами Park и др.;
активные и пассивные или активные магнитные активаторы; ультразвуковые двигатели (например, двигатели squiggle® motors, поставляемые компанией New Scale Technologies, Victor, NY, U.S.A.); гидравлические или пневматические приводы, такие как или любые их комбинации. Двигатель может находиться в элементе, который может перемещаться относительно корпуса катетера, или может быть внешним от корпуса катетера, или находиться внутри корпуса катетера. Двигатель может быть расположен в жидкой среде или не жидкой среде. Двигатель может быть герметизирован в том смысле, что он может быть выполнен с возможностью его работы в жидкой среде без модификации, или двигатель может быть негерметизированным, таким образом, что он не способен работать в жидкой среде без модификации. Например, может быть желательно, чтобы определенный электромагнитный двигатель не работал внутри жидкой среды. В такой компоновке барьер, не проницаемый для жидкости или текучей среды, может использоваться между электромагнитным двигателем и массивом ультразвуковых преобразователей. Размеры двигателя выбирают таким образом, чтобы он был совместимым с требуемым применением, например, для установки внутри компонентов, размеры которых определены для клинического применения в определенной внутренней полости или внутри сосуда. Например, для применения в ICE, компоненты, содержащиеся в нем, такие как двигатель, могут быть установлены в объеме от приблизительно 1 мм до приблизительно 4 мм диаметром.
В еще одном дополнительном аспекте катетер может содержать управляемый или предварительно изогнутый участок катетера, расположенный рядом с дистальным концом внешнего трубчатого корпуса, и отклоняющийся элемент может содержать массив ультразвуковых преобразователей. Кроме того, катетер может включать в себя канал (например, для транспортирования интервенционного устройства), продолжающийся от проксимального конца до точки, дистальной для него.
В другом аспекте катетер может содержать внешний трубчатый корпус, имеющий стенку, проксимальный конец и дистальный конец. Катетер может дополнительно включать в себя канал (например, для транспортирования интервенционного устройства), продолжающийся через внешний трубчатый корпус от проксимального конца до отверстия, расположенного дистально к проксимальному концу. Катетер может дополнительно включать в себя первый участок электрического проводника, содержащий множество взаимно соединенных электрических проводников, расположенных рядом друг с другом с электрически непроводящим материалом между ними. Первый участок электрического проводника может продолжаться от проксимального конца до дистального конца. Катетер может дополнительно включать в себя второй участок электрического проводника, электрически соединенный с первым участком электрического проводника на дистальном конце. Второй участок электрического проводника может содержать множество электрических проводников. Катетер может дополнительно включать в себя отклоняющийся элемент, расположенный на дистальном конце. Второй участок электрического проводника может быть электрически соединен с отклоняющимся элементом и может изгибаться в ответ на отклонение отклоняющегося элемента.
В другом аспекте катетер может содержать внешний трубчатый корпус, имеющий стенку, проксимальный конец и дистальный конец. Катетер может дополнительно включать в себя канал (например, для транспортирования интервенционного устройства или устройства подачи агента), продолжающийся через внешний трубчатый корпус от проксимального конца до отверстия, расположенного дистально к проксимальному концу. Катетер может дополнительно включать в себя отклоняющийся элемент, по меньшей мере, участок которого постоянно расположен за пределами внешнего трубчатого корпуса на дистальном конце, избирательно отклоняющегося относительно внешнего трубчатого корпуса и расположенного дистально отверстию. В одном варианте осуществления изобретения катетер может дополнительно включать в себя шарнир, расположенный на дистальном конце, где отклоняющийся элемент может быть взаимно соединен с возможностью опоры на шарнире. В таком варианте осуществления изобретения отклоняющийся элемент может быть выполнен с возможностью избирательно отклоняться относительно внешнего трубчатого корпуса вокруг оси шарнира, определенной шарниром.
Различные аспекты, описанные выше, содержат избирательно отклоняющееся устройство формирования изображения, расположенное на дистальном конце внешнего трубчатого корпуса катетера. Дополнительные аспекты настоящего изобретения могут включать в себя отклоняющиеся элементы вместо таких отклоняющихся устройств формирования изображения. Такие отклоняющиеся элементы могут включать в себя устройства формирования изображения, диагностические устройства, терапевтические устройства или любую их комбинацию.
Различные свойства, описанные выше в отношении каждого упомянутого выше аспекта, могут использоваться в любом из упомянутых выше аспектов. Дополнительные аспекты и соответствующие преимущества будут понятны для специалиста в данной области техники после рассмотрения следующего описания.
Применяемые здесь термины, такие как первый, второй, третий и т.д., используется здесь для различия между элементами в конкретном варианте осуществления, и их не следует интерпретировать в свете определенного варианта осуществления.
Краткое описание чертежей
На фиг.1А показан вариант осуществления катетера, имеющий корпус катетера и отклоняющийся элемент.
На фиг.1В и 1C показан концепция минимальной ширины представления для катетера.
На фиг.2А показан вариант осуществления катетера, имеющего отклоняющийся массив ультразвуковых преобразователей, расположенный на конце катетера.
На фиг.2В показан вид в поперечном сечении варианта осуществления катетера по фиг.2А.
На фиг.2С показан вариант осуществления катетера, имеющего отклоняющийся массив ультразвуковых преобразователей, расположенный на дистальном конце катетера.
На фиг.2-D, и 2Е показан вариант осуществления катетера по фиг.2 В и 2С, в котором катетер дополнительно включает в себя необязательный управляемый участок.
На фиг.3А-3-D показаны дополнительные варианты осуществления катетера, имеющие отклоняющийся массив ультразвуковых преобразователей, расположенный на дистальном конце катетера.
На фиг.4 показан вариант осуществления катетера имеющего электропроводные провода, соединенные с массивом ультразвуковых преобразователей, расположенным около дистального конца катетера, в котором электропроводные провода спирально продолжаются до проксимального конца катетера и внедрены в стенку катетера.
На фиг.4А показан примерный узел электропроводного провода.
На фиг.5А показан вариант осуществления катетера, который включает в себя отклоняющийся элемент.
На фиг.5В-5Е показан вариант осуществления катетера, который включает в себя отклоняющийся элемент в котором, отклоняющийся элемент отклоняется, благодаря движению внутреннего трубчатого корпуса относительно внешнего трубчатого корпуса.
На фиг.5F показан вариант осуществления электрического соединения между спирально расположенным элементом электрического соединения и гибким электрическим элементом.
На фиг.6А-6D показан вариант осуществления катетера, который включает в себя отклоняющийся элемент в котором, отклоняющийся элемент отклоняется, благодаря движению удлиненного элемента относительно корпуса катетера.
На фиг.7А и 7В показан дополнительный аспект в котором, массив ультразвуковых преобразователей расположен около дистального конца катетера. Массивом можно манипулировать между направлением бокового обзора и направлением вперед, используя устройство активации, соединенное с массивом и продолжающееся до проксимального конца катетера.
На фиг.8А-8D показаны различные примерные вариации катетера по фиг.7А и 7 В.
На фиг.9, 9А и 9В показаны дополнительные варианты осуществления изобретения, в которых отклоняется ультразвуковой массив.
На фиг.10А и 10В показаны дальнейшие альтернативные варианты осуществления изобретения.
На фиг.11, 11А и 11В показаны дополнительные варианты осуществления изобретения.
На фиг.12 показан еще один дополнительный вариант осуществления изобретения.
На фиг.13 показана блок-схема последовательности операций для варианта осуществления способа работы катетера.
На фиг.14А, 14В, 14С, 14D и 15 показаны альтернативные конструкции держателей.
На фиг.16 показан дополнительный вариант осуществления катетера.
На фиг.17 показан дополнительный вариант осуществления катетера.
На фиг.18А и 18В показан дополнительный вариант осуществления изобретения, в котором отклоняется ультразвуковой массив.
На фиг.19А, 19В и 19С показан дополнительный вариант осуществления изобретения, в котором отклоняется ультразвуковой массив.
На фиг.20А и 20В показан дополнительный вариант осуществления изобретения, в котором отклоняется ультразвуковой массив.
На фиг.21 показана альтернативная конструкция держателя.
На фиг.22А и 22В показан дополнительный вариант осуществления изобретения, в котором отклоняется ультразвуковой массив.
На фиг.23А и 23В показан дополнительный вариант осуществления изобретения, в котором отклоняется ультразвуковой массив.
На фиг.24А, 24В и 24С показан дополнительный вариант осуществления катетера, в котором, ультразвуковой массив разворачивают из катетера.
На фиг.25А и 25В показан дополнительный вариант осуществления катетера, в котором ультразвуковой массив разворачивают из катетера.
На фиг.25С показан дополнительный вариант осуществления катетера, в котором ультразвуковой массив разворачивают из катетера в положение обзора назад.
На фиг.26А и 26В показан дополнительный вариант осуществления катетера, в котором кончик временно соединен с трубчатым корпусом.
На фиг.27А, 27В и 27С показан дополнительный вариант осуществления катетера, в котором ультразвуковой массив движется с помощью пары кабелей.
На фиг.28А и 28В показан дополнительный вариант осуществления катетера, который шарнирно соединен с внутренним трубчатым корпусом.
На фиг.29А и 29В показан другой вариант осуществления катетера, который шарнирно соединен с внутренним трубчатым корпусом.
На фиг.30А и 30В показан еще один вариант осуществления катетера, который шарнирно соединен с внутренним трубчатым корпусом.
На фиг.31А и 31В показан вариант осуществления изобретения по фиг.30А и 30В с добавлением упругой трубки.
На фиг.32А и 32В показан дополнительный вариант осуществления катетера, который включает в себя инициатор прогиба.
На фиг.33А и 33В показан дополнительный вариант осуществления катетера, который включает в себя две тяги.
На фиг.34А и 34В показан дополнительный вариант осуществления катетера, который включает в себя две тяги, частично обернутые вокруг внутреннего трубчатого корпуса.
На фиг.35А и 35В показан дополнительный вариант осуществления катетера, который закреплен в конфигурации ввода с помощью тяги, намотанной вокруг внутреннего трубчатого корпуса.
На фиг.36А-36С показан дополнительный вариант осуществления катетера, соединенного с шарнирным рычагом и разворачиваемого с помощью проталкивающего провода.
На фиг.37А и 37В показан дополнительный вариант осуществления катетера, разворачиваемого с помощью проталкивающего провода.
На фиг.38А и 39В показаны два дополнительных варианта осуществления катетеров с массивами формирования ультразвукового изображения, развернутыми на множестве рычагов.
На фиг.40А и 40В показан дополнительный вариант осуществления катетера с массивами формирования ультразвукового изображения, развернутыми на множестве рычагов.
На фиг.41А-41C показан дополнительный вариант осуществления катетера с массивом формирования ультразвукового изображения, развернутым на отклоняющемся участке внутреннего трубчатого корпуса.
На фиг.42А-42С показан элемент пружины, который может быть расположен внутри катетера.
На фиг.43А-43С показан катетер с сжимающимся каналом, который может использоваться для шарнирного поворота массива формирования ультразвукового изображения.
На фиг.44А и 44В показан катетер с сжимающимся каналом.
На фиг.45А и 45В показан катетер с расширяемым каналом.
На фиг.46А и 46В показан катетер, который включает в себя внутренний трубчатый корпус, который включает в себя шарнирный участок и участок держателя кончика.
На фиг.47А и 47В показан катетер, который включает в себя трубчатый участок, который включает в себя шарнир.
На фиг.48А-48D показан катетер, который включает в себя петлю.
На фиг.49А и 49В показан катетер, который включает в себя элемент электрического соединения, который соединен с дистальным концом массива формирования ультразвукового изображения.
На фиг.50 показан способ электрического соединения спирально намотанного участка проводника с массивом формирования ультразвукового изображения.
На фиг.51А и 51В показан катетеры с вытягивающими проводами, которые продолжаются от первой стороны катетера до второй стороны катетера.
На фиг.52А и 52В показан элемент электрического соединения, обернутый вокруг подложки.
На фиг.53 показан частичный вид в поперечном сечении узла ультразвукового зонда катетера.
На фиг.54 показан другой частичный вид в поперечном сечении узла ультразвукового зонда катетера по фиг.53.
На фиг.55 показан частичный вид в поперечном сечении узла ультразвукового зонда катетера.
На фиг.56А показан частичный вид в поперечном сечении узла ультразвукового зонда катетера.
На фиг.56В показан частичный вид в поперечном сечении с торца узла ультразвукового зонда катетера по фиг.56А.
На фиг.57 показана система формирования ультразвуковых изображений с ручкой, катетером и отклоняющимся элементом.
На фиг.58 показано поперечное сечение катетера, который может использоваться в системе формирования ультразвуковых изображений по фиг.57.
На фиг.59 показано поперечное сечение другого варианта осуществления катетера.
На фиг.60 и 61 показан дистальный конец корпуса катетера, соединенного шарниром с отклоняющимся элементом.
На фиг.62 показан дистальный конец корпуса катетера, соединенного шарниром с отклоняющимся элементом.
На фиг.63А-63D показан вариант осуществления пленочного шарнира.
На фиг.64А-64С показан отклоняющийся элемент, соединенный с корпусом катетера пленочным шарниром.
На фиг.64D показан другой отклоняющийся элемент, соединенный с корпусом катетера пленочным шарниром.
На фиг.65А-65Е показан отклоняющийся элемент, соединенный с корпусом катетера шарниром.
На фиг.65F показан отклоняющийся элемент, соединенный с корпусом катетера двумя пленочными шарнирами.
На фиг.66А-66Е показан отклоняющийся элемент, соединенный с корпусом катетера шарниром, имеющим ось вращения.
На фиг.67 показан другой вариант осуществления шарнира.
На фиг.68 показан отклоняющийся элемент, соединенный с корпусом катетера шарниром и электрическими взаимными соединениями между отклоняющимся элементом и корпусом катетера.
На фиг.69А-69С показан другой отклоняющийся элемент, имеющий двигатель и элемент электрического соединения в виде часовой пружины вокруг двигателя.
На фиг.70А и 70В показан отклоняющийся элемент, имеющий двигатель и массив преобразователей.
На фиг.71А и 71В показан отклоняющийся элемент, имеющий массив преобразователей, двигатель и элемент электрического соединения соединенный с корпусом катетера пленочным шарниром.
На фиг.72 показан другой отклоняющийся элемент, имеющий двигатель и массив преобразователей.
На фиг.73А показан другой отклоняющийся элемент, имеющий массив преобразователей, двигатель и элемент электрического соединения, соединенный с корпусом катетера пленочным шарниром.
На фиг.73В показан другой отклоняющийся элемент, имеющий массив преобразователей, двигатель и элемент электрического соединения, соединенный с корпусом катетера пленочным шарниром.
На фиг.74 показан другой отклоняющийся элемент, соединенный пленочным шарниром с корпусом катетера, где отклоняющийся элемент включает в себя массив преобразователей, и корпус катетера включает в себя двигатель.
На фиг.75 и 76 показано размещение варианта осуществления управляемого катетера для внутрисердечной эхокардиографии в пределах правого предсердия.
На фиг.77 показано размещение варианта осуществления изобретения по фиг.75 в правом предсердии с отклоняющимся элементом, отклонившимся во второе положение.
На фиг.78 показано размещение варианта осуществления изобретения по фиг.75 в правом предсердии с отклоняющимся элементом, отклонившимся в третье положение.
Осуществление изобретения
На фиг.1А схематично показан вариант осуществления катетера 1000. Катетер 1000 может быть вставлен в тело пациента, при этом участками катетера 1000, расположенными внутри тела, можно манипулировать с помощью другого участка катетера 1000, расположенного за пределами тела. Таким образом, когда катетер 1000 вставлен в тело, проксимальный конец катетера 1000 остается снаружи тела и является доступным для врача, чтобы управлять дистальными участками катетера 1000, которые установлены внутри тела. Катетер 1000 может использоваться для широкого разнообразия назначений, включая: установку и/или подачу электронных устройств, таких как диагностические устройства (например, устройства формирования изображения) и устройств, которые обеспечивают терапевтическое лечение, таких как терапевтические составы или энергия (например, катетеры для абляции); размещение и/или удаление имплантируемых устройств (например, стентов, стентов-трансплантатов, фильтров полой вены); или любые их комбинации.
Катетер 1000 включает в себя корпус 1001. Корпус 1001 катетера представляет собой удлиненный элемент с проксимальным концом и дистальным концом. Корпус 1001 катетера может содержать, например, стержень (например, твердый стержень, стержень, имеющий, по меньшей мере, один канал), внешний трубчатый корпус, внутренний трубчатый корпус или любую их комбинацию. Корпус 1001 катетера может включать в себя управляемый участок или множество управляемых участков, расположенных вдоль корпуса. По меньшей мере, участки корпуса 1001 катетера могут быть гибкими и выполнены с возможностью изгиба, так, чтобы они следовали контурам каналов внутри тела пациента, в которые его вставляют.
Корпус 1001 катетера может, в случае необходимости, включать в себя канал. Такой канал может продолжаться по всей его длине или на участке длины корпуса 1001 катетера и может иметь отверстие на дистальном конце корпуса 1001 катетера или рядом с этим концом. Такой канал может использоваться для перемещения через него устройства и/или материала (например, для подачи устройства и/или материала к дистальному концу корпуса 1001 катетера и в область рядом с этим концом). В другом примере канал может использоваться для подачи терапевтического устройства, устройства формирования изображения, имплантируемого устройства, дозы терапевтического состава или любой их комбинации к месту рядом с дистальным концом корпуса 1001 катетера. В другом примере канал может использоваться для извлечения устройства, такого как фильтр полой вены.
Катетер 1000 включает в себя отклоняющийся элемент 1002. Как показано, отклоняющийся элемент 1002 может быть расположен на дистальном конце корпуса 1001 катетера. Отклоняющийся элемент может быть выполнен с возможностью отклоняться относительно дистального конца корпуса 1001 катетера. Например, отклоняющийся элемент 1001 может быть выполнен с возможностью установки в диапазоне углов относительно продольной оси корпуса 1001 катетера на дистальном конце корпуса 1001 катетера. Отклоняющийся элемент 1002 может иметь плавный, закругленный внешний профиль, что может способствовать снижению формирования тромба и/или повреждения тканей, при перемещении отклоняющегося элемента 1002 (например, продвижение вперед, извлечение, поворот, изменение положения, отклонение) в пределах тела.
Отклоняющийся элемент 1002 соединен с корпусом 1001 катетера через соединение 1003, которое позволяет отклоняться отклоняющемуся элементу 1002 относительно дистального конца корпуса 1001 катетера. Соединение 1003 может содержать компонент или материал, который соединяет два объекта, обычно обеспечивая возможность относительного поворота между ними, например, одно или несколько соединений или шарниров соответствующего типа, таких как пленочный шарнир или идеальный шарнир (который может здесь называться реальным шарниром). Такие шарниры могут быть изготовлены из гибкого материала или из компонентов, которые перемещаются относительно друг друга. Такие шарниры могут включать в себя ось. В случае одиночного идеального шарнира отклоняющийся элемент 1002 может поворачиваться относительно корпуса 1001 катетера вокруг фиксированной оси вращения. В случае одиночного пленочного шарнира отклоняющийся элемент 1002 может поворачиваться относительно корпуса 1001 катетера вокруг, по существу, фиксированной оси вращения. Соединение 1003 может содержать связующие элементы, такие как планки, шарнирно соединенные с корпусом 1001 катетера и/или отклоняющийся элемент 1002, для управления движением отклоняющегося элемента 1002 относительно корпуса 1001 катетера. Соединение 1003 может содержать элемент смещения (например, пружину), для смещения отклоняющегося элемента 1002 в требуемое положение относительно корпуса 1001 катетера (например, выровненное с дистальным концом корпуса 1001 катетера). Соединение 1003 может содержать материал с памятью формы.
Отклонением отклоняющегося элемента 1002 можно управлять с помощью элемента 1004 управления отклонением. Элемент 1004 управления отклонением может быть установлен вдоль корпуса 1001 катетера в точке за пределами корпуса (например, на проксимальном конце корпуса 1001 катетера). Элемент 1004 управления отклонением может, например, включать в себя кнопку, ползунок или любое другое соответствующее устройство, соединенное с одним или несколькими проводами управления, которые, в свою очередь, соединены с отклоняющимся элементом 1002, таким образом, что поворот ручки или движение ползунка приводит к соответствующему отклонению отклоняющегося элемента 1002. В таком варианте осуществления изобретения провод или провода управления могут продолжаться вдоль корпуса 1001 катетера от элемента 1004 управления до отклоняющегося элемента 1002. В другом варианте осуществления изобретения элемент 1004 управления отклонением может представлять собой электронный контроллер, который во время работы управляет электрическим отклоняющимся элементом 1002. В таком варианте осуществления изобретения электрические проводники для управления отклонением могут проходить вдоль корпуса 1001 катетера от элемента 1004 управления отклонением до компонентов, предназначенных для отклонения отклоняющегося элемента 1002.
Отклоняющийся элемент 1002 может, в случае необходимости, включать в себя двигатель 1005 для привода ведомого элемента 1006. Двигатель 1005 может быть функционально соединен с ведомым элементом 1006 для перемещения ведомого элемента 1006. Например, двигатель 1005 во время работы может приводить в движение ведомый элемент 1006 таким образом, что ведомый элемент 1006 будет шарнирно перемещаться вокруг оси шарнира. Двигатель 1005 может представлять собой любое соответствующее устройство, включая устройства, описанные здесь, для формирования движения, которое может использоваться для привода ведомого элемента 1006. Хотя на фиг.1А схематично показан ведомый элемент 1006, расположенный дальше двигателя 1005, могут быть предусмотрены другие конфигурации. Например, двигатель 1005 может быть расположен дальше ведомого элемента 1006. В другом примере двигатель 1005 и ведомый элемент 1006 могут быть расположены в компоновке рядом друг с другом (например, уложены друг на друга), могут быть установлены друг на друга таким образом, что участки двигателя 1005 и ведомого элемента 1006 расположены в одной и той же точке вдоль продольной оси отклоняющегося элемента 1002 (например, как двигатель 1005, так и ведомый элемент 1006 пересекают одну и ту же плоскость, перпендикулярную продольной оси отклоняющегося элемента).
Ведомый элемент 1006 может представлять собой электрическое устройство, такое как устройство формирования изображений, диагностическое и/или терапевтическое устройство. Ведомый элемент 1006 может включать в себя массив преобразователей. Ведомый элемент 1006 может включать в себя ультразвуковой преобразователь. Ведомый элемент 1006 может включать в себя массив ультразвуковых преобразователей, такой как одномерный массив или двумерный массив. В примере ведомый элемент 1006 может включать в себя одномерный массив ультразвуковых преобразователей, который может шарнирно перемещаться с помощью двигателя 1005 таким образом, что план формирования изображения одномерного массива ультразвуковых преобразователей будет перемещается в объеме, обеспечивая, таким образом, генерирование последовательностей 3D изображений и 4D изображений.
Корпус 1001 катетера может включать в себя один или несколько элементов, которые продолжаются вдоль длины корпуса 1001 катетера. Например, корпус 1001 катетера может включать в себя электрические проводники, продолжающиеся вдоль длины корпуса 1001 катетера, которые электрически соединяют двигатель 1005 и приводной элемент 1006 с компонентами, расположенными где-либо на катетере или за его пределами, такие как контроллеры двигателя, контроллеры ультразвукового преобразователя и оборудование для формирования ультразвукового изображения. Корпус 1001 катетера может включать в себя проводники управления или другие устройства управления, предназначенные для управления управляемым участком корпуса 1001 катетера и/или для управления отклонением отклоняющегося элемента 1002.
Катетер 1000 может, например, использоваться для формирования изображения сердца. В примерном варианте использования катетер 1000 может быть введен в тело и может быть установлен внутри сердца. Находясь внутри сердца, двигатель 1005 может приводить в возвратно-поступательное движение ведомый элемент 1006 в виде массива ультразвуковых преобразователей для генерирования последовательностей 3D изображений и/или 4D изображений сердца. Также, находясь внутри сердца, отклоняющийся элемент 1002 может отклоняться для изменения положения поля обзора массива ультразвуковых преобразователей.
В определенных вариантах осуществления изобретения отклоняющийся элемент 1002 может отклоняться таким образом, что минимальная ширина представления для катетера 1000 будет меньше, чем приблизительно 3 см. Минимальная ширина представления для катетера равна минимальному диаметру прямой трубки, в которой может поместиться весь катетер (без изгибов), в то время как кончик катетера ориентирован перпендикулярно оси трубки. Концепция минимальной ширины представления показан на фиг.1В и 1C. На фиг.1В показан катетер 1010, управляемый с использованием обычных технологий управления катетером, таких как провода управления, расположенные внутри стенки катетера 1010. Чтобы катетер 1010 мог устанавливаться внутри трубки 1012 так, чтобы кончик 1011 катетера 1010 был ориентирован перпендикулярно трубке 1012, трубка 1012 должна иметь такие размеры, чтобы разместить длину кончика 1011 катетера 1010 и радиус участка катетера 1010, который должен изгибаться для ориентирования кончика 1011 под углом 90°. Как правило, обычно управляемый катетер может иметь минимальную ширину представления приблизительно 6 см или больше. В отличие от этого, варианты осуществления катетеров, описанные здесь, такие как катетер 1020, который включает в себя отклоняющийся элемент 1021, могут во время работы устанавливаться внутри трубки 1023, диаметр которой близок к сумме длины отклоняющегося элемента 1021 и диаметра корпуса 1022 катетера 1020.
Подробное описание изобретения, которое следует со ссылкой на фиг.2А-52В, направлено на различные варианты осуществления катетеров, которые включают в себя отклоняющийся элемент, содержащий массив ультразвуковых преобразователей, и канал (например, для подачи интервенционного устройства). Такие варианты осуществления изобретения представлены в качестве примеров и не предназначены для ограничения объема настоящего изобретения. В этом отношении отклоняющийся элемент может содержать другие компоненты, чем массив ультразвуковых преобразователей или дополнительные компоненты. Такие компоненты могут включать в себя: механические устройства, такие как иглы и зонды для биопсии, включая резцы, захваты и скребки;
электрические устройства, такие как электрические проводники, электроды, датчики, контроллеры и компоненты формирования изображения; и доставляемые компоненты, такие как стенты, трансплантаты, лайнеры, фильтры, петли и терапевтические средства.
Хотя это не упомянуто, варианты осуществления изобретения, показанные на фиг.2А-52В, могут также включать в себя двигатель для перемещения массива ультразвуковых преобразователей или других компонентов. Такие дополнительные варианты осуществления изобретения не обязательно содержат канал.
Массив ультразвуковых преобразователей, встроенный в катетер, представляет собой уникальные конструктивные задачи. Две критические точки включают в себя, например, разрешающую способность в плане изображения и возможность выравнивания этого плана изображения с интервенционным устройством.
Разрешающая способность в плане формирования изображения ультразвукового массива может быть аппроксимирована с помощью следующего уравнения:
Поперечное разрешение = постоянная * длина волны * глубина изображения / длина отверстия
Для катетеров, описываемых здесь, длина волны обычно составляет 0,2 мм (на частоте 7,5 МГц). Постоянная составляет 2,0. Отношение (глубина изображения/длина отверстия) представляет собой критический параметр. Для формирования ультразвукового изображения в диапазоне 5-10 МГц для катетеров, представленных здесь, приемлемое разрешение в плане формирования изображения может быть достигнуто, когда это отношение составляет 10 или меньше.
Для формирования изображения с помощью катетера в основных сосудах и в сердце, желательно получать изображение с глубиной 70-100 мм. Катетеры, используемые внутри сердца и в основных сосудах, обычно имеют диаметр 3-4 мм или меньше. Таким образом, хотя концептуально массив преобразователей может быть изготовлен с произвольным размером и размещен в любом положении внутри корпуса катетера, эта модель представляет, что массивы преобразователей, которые могут быть непосредственно помещены внутри структуры катетера, не имеют достаточной ширины для получения приемлемых изображений.
План ультразвукового изображения, производимого с помощью массива, помещенного на катетере, обычно имеет узкую ширину, обычно называемую находящейся за пределами плоскости ширины изображения. Для того чтобы можно было видеть объекты в ультразвуковом изображении, важно, чтобы они находились в этой плоскости изображения. Когда гибкий/изгибающийся катетер помещают в основном сосуде или внутри сердца, плоскость изображения может быть выровнена в определенной степени. При этом желательно направлять второе устройство, помещенное внутри корпуса с помощью ультразвукового изображения, но с этой целью требуется размещение второго устройства в плоскости ультразвукового изображения. Если массив формирования изображения и интервенционное устройство представляют собой гибкие/изгибающиеся катетеры, которые вставлены в корпус, чрезвычайно трудно ориентировать одно интервенционное устройство в плоскости ультразвукового изображения катетера формирования изображения.
В определенных вариантах осуществления настоящего изобретения ультразвуковое изображение используется для направления интервенционного устройства. С этой целью требуется использовать достаточно большое отверстие для получения изображения с приемлемым разрешением, будучи при этом способным размещать устройство в известном положении, которое является стабильным относительно массива формирования изображения и/или иметь возможность выравнивать и/или совмещать интервенционное устройство с плоскостью ультразвукового изображения.
В определенных вариантах осуществления изобретения длина отверстия ультразвукового массива может быть больше, чем максимальный поперечный размер катетера. В некоторых вариантах осуществления изобретения длина отверстия ультразвукового массива может быть намного больше (в 2-3 раза больше), чем диаметр катетера. Такой крупный преобразователь, однако, может поместиться в максимальный диаметр катетера, который вставляют в тело, составляющий 3-4 мм. Находясь внутри тела, массив формирования изображения размещают за пределами корпуса катетера, оставляя пространство для пропуска интервенционного устройства через тот же самый катетер, который будет затем размещен в известном положении относительно массива формирования изображения. В определенных компоновках массив формирования изображения может быть развернут таким образом, что интервенционное устройство можно легко удерживать в пределах плоскости формирования ультразвукового изображения.
Катетер может быть выполнен с возможностью прохода через прокол в коже в удаленном месте доступа к сосуду (например, через сосуд в ноге). Через это место доступа к сосуду катетер может быть введен в области сердечно-сосудистой системы, такие как нижняя полая вена, сердечные камеры, брюшная аорта и грудная аорта.
Размещение катетера в этих анатомических местах расположения обеспечивает канал для перемещения устройств или для терапии к специфичным, целевым тканям или структурам и/или из них. Один пример этого включает в себя ввод в нижнюю полую вену фильтров для лежачих пациентов, для которых транспортировка в лабораторию катетеризации представляет собой большой риск или по другой причине является нежелательной. Катетер с массивом ультразвуковых преобразователей позволяет врачу не только идентифицировать правильное анатомическое местоположение для размещения фильтра внутри нижней полой вены, но также обеспечивает канал, через который фильтр полой вены может быть подан в условиях прямой ультразвуковой визуализации. Как идентификация местоположения, так и подача устройства могут происходить без изъятия или замены катетера и/или устройства формирования изображения. Кроме того, визуализация после подачи устройства позволяет врачу проверять его местоположение размещения и функцию (функции) прежде, чем катетер будет убран.
Другое применение такого катетера представляет собой канал, через который могут быть поданы катетеры для абляции в предсердия сердца. Хотя катетеры для формирования ультразвуковых изображений используют в настоящее время во многих таких процедурах сердечной абляции, очень трудно обеспечить правильную ориентацию катетеров для абляции и ультразвукового катетера, чтобы обеспечить соответствующую визуализацию местонахождения абляции. Описанный катетер здесь обеспечивает канал, через который катетер абляции может быть направлен, и положение кончика катетера абляции отслеживают в условиях прямой ультразвуковой визуализации. Как описано выше, коаксиальное совмещение этого катетера и других интервенционных устройств и систем для доставки терапевтических средств обеспечивает средство, с помощью которого могут быть достигнуты прямая визуализация и управление.
Возвращаясь теперь снова в чертежам, на фиг.2А показан вариант осуществления катетера, имеющего массив 7 ультразвуковых преобразователей, расположенный на отклоняющемся дистальном конце катетера 1. В частности, катетер 1 содержит проксимальный конец 3 и дистальный конец 2. На дистальном конце расположен массив 7 ультразвуковых преобразователей. К массиву 7 ультразвуковых преобразователей прикреплен, по меньшей мере, один электропроводный провод 4 (такой как GORE™ Micro-Miniature Ribbon Cable), который продолжается от массива 7 к проксимальному концу 3 катетера 1. По меньшей мере, один электропроводный провод 4 выходит из проксимального конца 3 катетера через отверстие в стенке катетера и электрически соединяется с возбудителем преобразователя; при этом процессор 5 изображения обеспечивает визуальное изображение через устройство 6. Такое электрическое соединение может включать в себя непрерывный проводящий путь через проводник или последовательность проводников. Такое электрическое соединение может включать в себя индуктивный элемент, такой как изолирующий трансформатор. В соответствующих случаях, другие электрические соединения, описанные здесь, могут включать в себя такие индуктивные элементы.
На фиг.2В показан вид в поперечном сечении фиг.2А вдоль линии А-А. Как можно видеть на фиг.2В, катетер 1 включает в себя стенку 12, которая продолжается в длину, по меньшей мере, до проксимального конца 3 и, кроме того, определяет канал 10, который продолжается в длину, по меньшей мере, до проксимального конца 3. Стенка 12 катетера может быть изготовлена из любого соответствующего материала или материалов, таких как экструдированные полимеры, и может содержать один или несколько слоев этих материалов. Кроме того, показан, по меньшей мере, один электропроводный провод 4, расположенный в нижней части стенки 12 катетера.
Работа катетера 1 будет понятна со ссылкой на фиг.2А и 2С. В частности, дистальный конец 2 катетера может быть введен в требуемый канал тела и продвинут до желательного местонахождения для лечения, так, что при этом массив 7 ультразвукового преобразователя находится в конфигурации бокового обзора (как показано на фиг.2А). После достижения целевой области, интервенционное устройство 11 может быть продвинуто через канал 10 катетера 1 и за пределы дистального отверстия 13 и может быть продвинуто в дистальном направлении. Как можно видеть, катетер 1 может быть выполнен таким образом, что перемещение вперед интервенционного устройства 11 в дистальном направлении и из дистального отверстия 13 может отклонять дистальный конец 2 и, таким образом, привести к преобразованию массива 7 ультразвуковых преобразователей из конфигурации бокового обзора в конфигурацию переднего обзора. Таким образом, врач может перемещать интервенционное устройство 11 в поле обзора массива 7 ультразвуковых преобразователей.
Термин "отклоняющийся" может включать в себя 1) "активно отклоняющийся", что означает, что в вариантах осуществления изобретения с массивом массив или участок катетера, содержащий массив, может перемещаться с помощью дистанционного приложения силы (например, электрической (например, по проводам или по беспроводному каналу), механической, гидравлической, пневматической, магнитной и т.д.), с передачей этой силы с помощью различных средств, включая вытяжные провода, гидравлические линии, воздушные линии, магнитную связь или электрические проводники; и 2) "пассивно отклоняющийся" означает, что, в вариантах осуществления изобретения с массивом, массив или участок катетера, содержащий массив, в состоянии покоя, в неограниченном состоянии, проявляет тенденцию выравнивания с продольной осью катетера и может перемещаться под действием локальных сил, прикладываемых в результате введения интервенционного устройства 11.
В определенных вариантах осуществления изобретения массив ультразвуковых преобразователей может отклоняться вплоть до 90° от продольной оси катетера, как показано на фиг.2С. Кроме того, отклоняющийся массив 7 ультразвуковых преобразователей может быть закреплен на катетере с помощью шарнира 9, как показано на фиг.2D. В одном варианте осуществления изобретения шарнир 9 может представлять собой подпружиненный шарнир. Такой подпружиненный шарнир может приводиться в действие из проксимального конца катетера с помощью любого соответствующего средства. В одном варианте осуществления изобретения подпружиненный шарнир представляет собой материал с памятью формы, приводимый в действие путем отвода внешней оболочки.
Как показано на фиг.2D и 2Е, катетер 1 может дополнительно содержать управляемый участок 8. На фиг.2Е показан управляемый участок 8, отклонившийся под определенным углом относительно катетера, проксимального к управляемому участку 8.
Термин "управляемый" определен, как возможность направлять ориентацию участка катетера, дистального к управляемому участку под углом относительно участка катетера, проксимального к управляемому участку. "Управление" может включать в себя любой известный способ управления, который может использоваться для направления ориентации участка катетера, дистального к управляемому участку под углом относительно участка катетера, проксимального к управляемому участку, включая способы, в которых используется больше, чем один управляемый участок. Такие способы могут включать в себя, без ограничения, использование дистанционного приложения силы (например, электрической (например, по проводам или по беспроводному каналу), механической, гидравлической, пневматической, магнитной и т.д.) с передачей этой силы с помощью различных средств, включающих в себя вытяжные и/или проталкиваемые провода, гидравлические линии, воздушные линии, магнитное соединение или электрические проводники, включающие в себя, без ограничений, передачу с помощью манипуляции вытяжных и/или проталкиваемых проводов, нитей, трубок и/или кабелей. Кроме того, корпус катетера может быть выполнен с участками, гибкость или свойства сжатия которых отличаются от других участков корпуса катетера. В одном варианте осуществления изобретения, имеющем внутренний трубчатый корпус и/или внешний трубчатый корпус, внешний трубчатый корпус может иметь один или несколько управляемых участков с проводами вытягивания/проталкивания, закрепленными на дистальном конце управляемых участков и продолжающимися через один или несколько каналов внешней трубчатой стенки до крепления с элементом управления на ручке. Управление внешним трубчатым корпусом позволяет также управлять внутренним трубчатым корпусом. Как вариант, можно управлять внутренним трубчатым корпусом, а управление внутренним трубчатым корпусом может управлять также внешним трубчатым корпусом.
Управление со ссылкой на фиг.2Е позволяет клиническому врачу направлять или перемешать катетер в соответствующее анатомическое положение. Впоследствии клинический врач может использовать устройство активации, как показано со ссылкой на фиг.22В, для отклонения отклоняющегося элемента с целью направления устройства формирования изображения на требуемые устройства или анатомические особенности. Микроуправление, как показано со ссылкой на фиг.11А и 11В, может использоваться для направления устройства формирования изображения на анатомические особенности. Направление может также использоваться для того, чтобы следовать траектории интервенционного устройства, по мере его продвижения. В одном варианте осуществления изобретения управление катетером и последующим направлением устройства формирования изображения путем отклонения выполняются независимо.
В дополнительном варианте осуществления изобретения, показанном на фиг.3А и 3В, катетер 1 включает в себя массив 7 ультразвуковых преобразователей на отклоняющемся дистальном конце 17 катетера 1. Катетер 1 содержит проксимальный конец (не показан) и отклоняющийся дистальный конец 17. Массив 7 ультразвукового преобразователя размещен на отклоняющемся дистальном конце 17. Электрические провода 4 закреплены на массиве 7 ультразвукового преобразователя и продолжаются в проксимальном направлении до проксимального конца катетера 1. Катетер 1 также включает в себя, в общем, расположенный по центру канал 10, который продолжается от проксимального конца до дистального кончика катетера. На дистальном конце 17 канал 10, расположенный, в общем, в центре, по существу, блокирован или закрыт массивом 7 ультразвуковых преобразователей. В конечном итоге, катетер 1 также включает в себя, по меньшей мере, одну продольную прорезь 18, которая продолжается через область, проксимальную относительно массива 7 ультразвукового преобразователя.
Как можно видеть на фиг.3В, после продвижения интервенционного устройства 11 дистально через канал 10, интервенционное устройство 11 отклоняет отклоняющийся дистальный конец 17 и массив 7 ультразвуковых преобразователей перемещается вниз, открывая, таким образом, канал 10 так, что интервенционное устройство 11 можно продвигать дистально за пределы массива 7 ультразвукового преобразователя.
На фиг.3С показан катетер 1', который представляет собой альтернативную конфигурацию катетера 1, показанного на фиг.3А и 3В. Катетер 1' выполнен так же, как катетер 1, за исключением того, что массив 7 формирования ультразвукового изображения ориентирован так, что во время работы он формирует изображение объема на боковой стороне катетера 1', противоположной продольной прорези 18 (например, в направлении, противоположном от массива 7 формирования ультразвукового изображения по фиг.3А и 3В). Это может быть предпочтительным, например, для поддержания совмещения с фиксированным анатомическим ориентиром, при разворачивании интервенционного устройства 11.
На фиг.3D показан катетер 1'', который представляет собой вариацию катетера 1 по фиг.3А и 3В. Катетер 1'' выполнен таким образом, что массив 7 формирования ультразвукового изображения шарнирно поворачивается в частичное положение обзора вперед, когда интервенционное устройство 11 продвигают вперед через продольную прорезь 18. Массив 7 формирования ультразвукового изображения катетера 1'' может быть ориентирован, как показано на иллюстрации, или он может быть ориентирован для формирования изображения в противоположном направлении (аналогично массиву 7 формирования ультразвукового изображения катетера 1'). В дополнительных вариантах осуществления изобретения (не показаны), катетер, аналогичный катетеру 1, может включать в себя множество массивов формирования изображения (например, занимающих положения, показанные на обеих фиг.3А и 3С).
В различных вариантах осуществления изобретения, описанных здесь, могут быть предусмотрены катетеры, имеющие массив ультразвуковых преобразователей, расположенный рядом с его дистальным концом. Корпус катетера может содержать трубку, имеющую проксимальный конец и дистальный конец. Кроме того, катетер может иметь, по меньшей мере, один канал, продолжающийся от проксимального конца до, по меньшей мере, места рядом с массивом ультразвуковых преобразователей. Катетер может содержать электрические провода (например, a GORE™ Micro-Miniature Ribbon Cable), закрепленные на массиве ультразвуковых преобразователей и встроенные в стенку катетера и продолжающиеся по спирали от массива ультразвуковых преобразователей до проксимального конца катетера.
Такой катетер показан, например, на фиг.4 и 4А. В частности, на фиг.4 и 4А демонстрируется катетер 20, имеющий проксимальный конец (не показан) и дистальный конец 22 с массивом 27 ультразвуковых преобразователей, расположенным на дистальном конце 22 катетера 20. Как можно видеть, канал 28 определен внутренней поверхностью полимерной трубки 26, которая может быть сформирована из соответствующего полимера с хорошей смазываемостью (такого как, например, РЕВАХ ® 72D, РЕВАХ ® 63D, РЕВАХ ® 55D, полиэтилен высокой плотности, политетрафторэтилен, и расширенный политетрафторэтилен, и их комбинации), и продолжается от проксимального конца до дистального конца 22 рядом с массивом 27 ультразвуковых преобразователей. Электрические провода (например, GORE™ Micro-Miniature Ribbon Cable) 24 спирально намотаны вокруг полимерной трубки 26 и продолжаются от места рядом с массивом 27 ультразвуковых преобразователей проксимально до проксимального конца. Пример соответствующего микроминиатюрного плоского кабеля показан на фиг.4А, где микроминиатюрный плоский кабель 24 включает в себя электрические провода 21 и соответствующее заземление, такое как медь 23. Элемент 43 проводящей цепи (такой как гибкая плата) прикреплен к массиву 27 ультразвуковых преобразователей и к электрическим проводам 24. Соответствующий слой 40 полимерной пленки (например, из полимера с хорошей смазываемостью и/или термоусадочного полимера) может быть размещен поверх электрических проводов 24, чтобы действовать как уплотнительный слой между электрическими проводами 24 и экранирующим слоем 41. Экранирующий слой 41 может содержать любой соответствующий проводник, который может быть спирально намотан поверх полимерной пленки 40, например, в противоположном направлении от электрических проводов 21. В конечном итоге, внешняя оболочка 42 может быть предусмотрена поверх экранирующего слоя 41 и может представлять собой любой соответствующий материал, такой как полимер с хорошей смазываемостью. Соответствующие полимеры включают в себя, например, РЕВАХ ® 70D, РЕВАХ ® 55D, РЕВАХ ® 40D и пленку РЕВАХ ® 23D. Катетер, показанный на фиг.4 и 4А, может включать в себя отклоняющийся дистальный конец, и управляемые участки, описанные выше.
Представленный выше катетер обеспечивает средство электрического интерфейса с ультразвуковым зондом на дистальном конце катетера, обеспечивая при этом рабочий канал, который упрощает транспортирование устройства и/или материала (например, для подачи интервенционных устройств в область формируемого изображения). В конструкции катетера используются проводники, как для подачи питания к массиву, так и для обеспечения механических свойств, которые улучшают сопротивление образованию петель и скручиванию. Новая представленная конструкция обеспечивает средство для упаковки проводников и необходимого экранирования внутри тонкой стенки, обеспечивая, таким образом, профиль оболочки, которая пригодна для интервенционных процедур, с нацеливанием на OD при 14 Fr (френч, единица по шкале Шарьера измерения наружного диаметра трубчатых и цилиндрических медицинских устройств: катетеров, зондов, игл и т.п.) или меньше и с нацеливанием на ID при превышении 8 Fr, что, таким образом, способствует доставке типичных катетеров абляции, систем установки фильтра, игл и других общих интервенционных устройств, разработанных для внутрисосудистых и других процедур.
На фиг.5А показан вариант осуществления катетера 50, который включает в себя отклоняющийся элемент 52 и корпус 54 катетера. Корпус 54 катетера может быть гибким и выполнен с возможностью изгиба, с тем, чтобы следовать контурам сосуда тела, в которое его вставили. Отклоняющийся элемент 52 может быть расположен на дистальном конце 53 катетера 50. Катетер 50 включает в себя ручку 56, которая может быть расположена на проксимальном конце 55 катетера 50. Во время процедуры, в которой отклоняющийся элемент 52 вставляют в тело пациента, ручка 56 и участок корпуса 54 катетера остаются снаружи тела. Пользователь (например, врач-терапевт, техник, врач, производящий интервенционные манипуляции) катетера 50 может управлять положением и различными функциями катетера 50. Например, пользователь может удерживать ручку 56 и манипулировать ползунком 58 для управления степенью отклонения отклоняющегося элемента 52. В этом отношении, отклоняющийся элемент 52 может быть отклоняться избирательно. Ручка 56 и ползунок 58 могут быть выполнены таким образом, что положение ползунка 58 относительно ручки 56 может поддерживаться, поддерживая таким образом выбранную степень отклонения отклоняющегося элемента 52. Такое поддержание положения может быть, по меньшей мере, частично достигнуто, например, с помощью трения (например, трения между ползунком 58 и неподвижным участком ручки 56), упоров и/или любого другого соответствующего средства. Катетер 50 может быть удален из тела путем вытягивания (например, путем вытягивания ручки 56).
Кроме того, пользователь может вставлять интервенционное устройство (например, диагностическое устройство и/или терапевтическое устройство) через входное отверстие 62 для интервенционного устройства. Пользователь затем может подавать интервенционное устройство через катетер 50 для перемещения интервенционного устройства в дистальный конец 53 катетера 50. Электрические соединения между процессором формирования изображения и отклоняющимся элементом могут быть направлены через отверстие 60 электронного устройства и через корпус 54 катетера, как описано ниже.
На фиг.5В-5Е показан вариант осуществления катетера, содержащего отклоняющийся элемент 52, который может отклоняться при движении внутреннего трубчатого корпуса 80 относительно внешнего трубчатого корпуса 79 корпуса 54 катетера. Как показано на фиг.5В, иллюстрируемый отклоняющийся элемент 52 включает в себя кончик 64. Внутри кончика 64 могут быть расположены различные компоненты и элементы.
Кончик 64 может иметь поперечное сечение, которое соответствует поперечному сечению внешнего трубчатого корпуса 79. Например, и как показано на фиг.5В, кончик 64 может иметь закругленный дистальный конец 66, который соответствует внешней поверхности внешнего трубчатого корпуса 79. Кончик 64, в котором расположен массив 68 ультразвуковых преобразователей, может иметь форму, которая, по меньшей мере, частично соответствует (например, вдоль нижней внешней поверхности кончика 64, если рассматривать фиг.5В) внешней поверхности внешнего трубчатого корпуса 79. По меньшей мере, кончик 64 может иметь такую форму, чтобы способствовать транспортированию через внутренние структуры пациента, такие как сосудистая сеть. В этом отношении, закругленный дистальный конец 66 может способствовать перемещению отклоняющегося элемента 52 через сосудистую сеть. Другие соответствующие формы конца можно использовать в качестве формы дистального конца 66 кончика 64.
В одном варианте осуществления изобретения, таком как показан на фиг.5В-5D, кончик 64 может удерживать массив 68 ультразвуковых преобразователей. Как следует понимать, как показано на фиг.5В, массив 68 ультразвуковых преобразователей может представлять собой массив бокового обзора с отклоняющимся элементом 52, выровненным с внешним трубчатым корпусом 79. Поле обзора массива 68 ультразвуковых преобразователей может быть расположено перпендикулярно плоской верхней поверхности (как ориентировано на фиг.5В) массива 68 ультразвуковых преобразователей. Как представлено на фиг.5В, поле обзора массива 68 ультразвуковых преобразователей может быть не закрыто внешним трубчатым корпусом 79, когда массив 68 ультразвуковых преобразователей находится в положении бокового обзора. В этом отношении, массив 68 ультразвуковых преобразователей может во время операции формировать изображения во время установки положения корпуса 54 катетера, в результате чего обеспечивается возможность формирования изображений анатомических ориентиров для того, чтобы способствовать установке положения дистального конца канала 82. Массив 68 ультразвуковых преобразователей может иметь длину отверстия. Длина отверстия может быть больше, чем максимальный размер поперечного сечения внешнего трубчатого корпуса 79. По меньшей мере, участок отклоняющегося элемента 52 может быть расположен постоянно дистально дистальному концу внешнего трубчатого корпуса 79. В одном варианте осуществления изобретения полностью отклоняющийся элемент 52 может быть постоянно расположен дистально дистальному концу внешнего трубчатого корпуса 79. В таком варианте осуществления изобретения отклоняющегося элемента может быть невозможно устанавливать отклоняющийся элемент во внешнем трубчатом корпусе 79.
Кончик 64 может дополнительно включать в себя элемент, который обеспечивает для катетера возможность отслеживать направляющий провод. Например, как показано на фиг.5В, кончик 64 может включать в себя функцию отверстия 70 дистального направляющего провода, соединенного с отверстием 72 проксимального направляющего провода. При этом катетер может во время работы перемещаться вдоль длины направляющего провода, протянутого через дистальное 70 и проксимальное 72 отверстия направляющего провода.
Как следует отметить, отклоняющийся элемент 52 может отклоняться относительно внешнего трубчатого корпуса 79. При этом отклоняющийся элемент 52 может быть соединен с одним или несколькими элементами для управления движением отклоняющегося элемента 52, при его отклонении. Тяга 78 может взаимно соединять отклоняющийся элемент 52 с корпусом 54 катетера. Тяга 78 может быть закреплена на отклоняющемся элементе 52 на одном конце и на корпусе 54 катетера на другом конце. Тяга 78 может быть выполнена, как растяжимый элемент, который во время работы предотвращает перемещение точек привязки на определенное расстояние друг от друга, большее, чем длина тяги 78. При этом с помощью тяги 78 отклоняющийся элемент 52 может быть взаимно соединен с ограничением с внешним трубчатым корпусом 79.
Внутренний трубчатый корпус 80 может быть расположен в пределах внешнего трубчатого корпуса 79. Внутренний трубчатый корпус 80 может включать в себя канал 82, продолжающийся вдоль длины внутреннего трубчатого корпуса 80. Внутренний трубчатый корпус 80 может перемещаться относительно внешнего трубчатого корпуса 79.
Это движение может быть активировано движением ползунка 58, показанного на фиг.5А. Держатель 74 может взаимно соединять отклоняющийся элемент 52 с внутренним трубчатым корпусом 80. Держатель 74 может быть конструктивно выполнен отдельно от внутреннего трубчатого корпуса 80 и внешнего трубчатого корпуса 79. Гибкая плата 76 может содержать электрические соединения, которые во время работы электрически соединяют массив 68 ультразвуковых преобразователей с элементом 104 электрического соединения (показанным на фиг.5Е), который расположен внутри внешнего трубчатого корпуса 79. Открытый участок гибкой платы 76 между кончиком 64 и внешним трубчатым корпусом 79 может быть инкапсулирован для предотвращения его возможного контакта с текучими средами (например, кровью), когда отклоняющийся элемент 52 расположен внутри тела пациента. При этом гибкая плата 76 может быть инкапсулирована с помощью клея, может быть обернута пленкой или любым другим соответствующим компонентом, который во время работы изолирует электрические проводники на гибкой планке 76 от окружающей среды. В одном варианте осуществления изобретения тяга 78 может быть намотана вокруг участка гибкой платы 76 между кончиком 64 и внешним трубчатым корпусом 79.
Отклонение отклоняющегося элемента 52 будет описано ниже со ссылкой на фиг.5С и 5D. На фиг.5С и 5D показан отклоняющийся элемент 52 с участком кончика 64, окружающим массив 68 ультразвукового изображения и удаленным держателем 74. Как показано на фиг.5С, держатель 74 может включать в себя участок 84 контакта с трубчатым корпусом, который во время работы прикрепляет держатель 74 к внутреннему трубчатому корпусу 80. Участок 84 контакта с трубчатым корпусом может быть закреплен на внутреннем трубчатом корпусе 80 любым соответствующим образом. Например, участок 84 контакта с трубчатым корпусом может быть закреплен на внутреннем трубчатом корпусе 80 с помощью внешней термоусадочной обертки. В такой конфигурации участок 84 контакта с трубчатым корпусом может быть размещен поверх внутреннего трубчатого корпуса 80, и затем элемент термоусадочной обертки может быть помещен поверх участка 84 контакта с трубчатым корпусом. Затем может быть приложено тепло, которое приводит к усадке материала термоусадочной обертки и фиксации участка 84 контакта с трубчатым корпусом на внутреннем трубчатом корпусе 80. Дополнительная обертка может быть затем нанесена поверх термоусадочной обертки для дополнительной фиксации участка 84 контакта с трубчатым корпусом на внутреннем трубчатом корпусе 80. В другом примере участок 84 контакта с трубчатым корпусом может быть закреплен на внутреннем трубчатом корпусе 80 с помощью клея, сварки, креплений или любой их комбинации. В другом примере участок 84 контакта с трубчатым корпусом может быть закреплен на внутреннем трубчатом корпусе 80, как часть процесса сборки, используемого для построения внутреннего трубчатого корпуса 80. Например, внутренний трубчатый корпус 80 может быть частично собран, участок 84 контакта с трубчатым корпусом может быть расположен вокруг частично собранного внутреннего трубчатого корпуса 80, и затем сборка внутреннего трубчатого корпуса 80 может быть закончена, захватывая, таким образом, участок 84 контакта с трубчатым корпусом внутри участка внутреннего трубчатого корпуса 80.
Держатель 74 может содержать, например, материал с памятью формы (например, сплав с памятью формы, такой как Нитинол). Держатель 74 может дополнительно включать в себя шарнирный участок 86. Шарнирный участок 86 может содержать один или несколько элементов, взаимно соединяющих участок 84 контакта с трубчатым корпусом с опорным участком 88. Шарнирный участок 86, как показано на фиг.5В-5С, может содержать два элемента. Опорный участок 88 может поддерживать массив 68 ультразвуковых преобразователей. Держатель 74, включающий в себя шарнирный участок 86, может обладать достаточной прочностью колонки для удержания отклоняющегося элемента 52, по существу, выровненным с внешним трубчатым корпусом 79 в отсутствие какого-либо перемещения внутреннего трубчатого корпуса 80 относительно внешнего трубчатого корпуса 79. При этом отклоняющийся элемент 52 может во время работы оставаться, по существу, выровненным с внешним трубчатым корпусом 79, когда внешний трубчатый корпус 79 вставляют в тело пациента и направляют его через тело пациента.
Шарнирный участок 86 может иметь такую форму, что при приложении силы активации, шарнирный участок 86 упруго деформируется вдоль заданного пути вокруг оси 92 отклонения. Заданный путь может быть таким, что кончик 64 и шарнирный участок 86 перемещаются в положение, где они не мешают интервенционному устройству, которое выдвигается из дистального конца канала 82. При формировании изображения поле обзора массива 68 ультразвуковых преобразователей может, по существу, поддерживаться в определенном положении относительно внешнего трубчатого корпуса 79, когда интервенционное устройство продвигают через отверстие 81 на дистальном конце канала 82 и в поле обзора. Как показано на фиг.5В-5D, шарнирный участок может содержать два, в общем, параллельных участка 86а и 86b, где концы каждого из, в общем, параллельных участков 86а и 86b (например, где шарнирный участок 86 встречается с опорным участком 88 и, где шарнирный участок 86 встречается с участком 84 контакта с трубчатым корпусом) могут, в общем, иметь форму, совпадающую с цилиндром, ориентированным вдоль центральной оси 91 внутреннего трубчатого корпуса 80.
Центральный участок каждого из, в общем, параллельных участков 86а и 86b может быть искривлен в направлении центральной оси 91 внешнего трубчатого корпуса 79 таким образом, что центральные участки, в общем, выровнены с осью 92 отклонения. Шарнирный участок 86 расположен таким образом, что он расположен приблизительно менее чем по всей внешней окружности внутреннего трубчатого корпуса 80.
Для отклонения отклоняющегося элемента 52 относительно внешнего трубчатого корпуса 79 внутренний трубчатый корпус 80 может перемешаться относительно внешнего трубчатого корпуса 79. Такое относительное перемещение показано на фиг.5D. Как показано на фиг.5D, движение внутреннего трубчатого корпуса 80 в направлении 90 активации (например, в направлении массива 68 ультразвуковых преобразователей, когда отклоняющийся элемент 52 выровнен с внешним трубчатым корпусом 79) может приводить к формированию силы, действующей на держатель 74, в направлении 90 активации. Однако, поскольку опорный участок 88 соединен с внешним трубчатым корпусом 79 таким образом, что он ограничен тягой 78, опорный участок 88 перемещается не существенно в направлении 90 активации. При этом движение внутреннего трубчатого корпуса 80 в направлении 90 активации может привести к тому, что опорный участок 88 будет шарнирно поворачиваться вокруг его границы перехода с тягой 78 и также на шарнирном участке 86, изогнутым, как показано на фиг.5D. Таким образом, движение внутреннего трубчатого корпуса 80 в направлении 90 активации может привести к тому, что опорный участок 88 (и массив 68 ультразвуковых преобразователей, прикрепленный к опорному участку 80) будет поворачиваться на 90°, как показано на фиг.5D. В соответствии с этим, движение внутреннего трубчатого корпуса 80 может привести к управляемому отклонению отклоняющегося элемента 52. Как показано, отклоняющийся элемент 52 может избирательно отклоняться от центральной оси 91 внешнего трубчатого корпуса 79.
В примерном варианте осуществления изобретения движение внутреннего трубчатого корпуса 80 приблизительно на 0,1 см может привести к отклонению отклоняющегося элемента 52 по дуге приблизительно на 9°. При этом движение внутреннего трубчатого корпуса 80 приблизительно на 1 см может привести к отклонению отклоняющегося элемента 52 приблизительно на 90°. Таким образом, отклоняющийся элемент 52 может избирательно отклоняться от положения бокового обзора вперед в промежуточное положение. Промежуточные положения отклоняющегося элемента 52 могут быть получены при перемещении внутреннего трубчатого корпуса 80 на заданное расстояние. Например, в текущем примерном варианте осуществления изобретения, отклоняющийся элемент 52 может быть отклонен на 45° от положения бокового обзора, в результате перемещения внутреннего трубчатого корпуса 80 приблизительно на 0,5 см относительно внешнего трубчатого корпуса 79 в направлении 90 активации. Другие соответствующие конфигурации элемента могут быть встроены для получения других взаимосвязей между внутренним трубчатым корпусом 80 и отклонением отклоняющегося элемента 52. Кроме того, могут быть получены отклонения больше, чем на 90°, (например, такие, что отклоняющийся элемент 52 будет, по меньшей мере, частично выполнять боковой обзор в сторону корпуса 54 катетера, противоположную от показанной на фиг.5С). Кроме того, в одном варианте осуществления изобретения катетер 50 может быть выполнен таким образом, что может быть достигнуто заданное максимальное отклонение отклоняющегося элемента 52. Например, ручка 56 может быть выполнена с возможностью ограничения движения ползунка 58 таким образом, чтобы полный диапазон движений ползунка 58 соответствовал отклонению на 45° (или любому другому соответствующему отклонению) отклоняющегося элемента 52.
Ползунок 58 и ручка 56 могут быть выполнены таким образом, чтобы, по существу, любое относительное движение ползунка 58 относительно ручки 56 приводило к отклонению отклоняющегося элемента 52. При этом может, по существу, отсутствовать мертвая зона ползунка 58, когда движение ползунка 58 не приводит к отклонению отклоняющегося элемента 52. Кроме того, взаимосвязь между движением ползунка 58 (например, относительно ручки 56) и величиной соответствующего отклонения отклоняющегося элемента 52 может быть, по существу, линейной.
Когда отклоняющийся элемент 52 отклоняется от положения, показанного на фиг.5С таким образом, что часть кончика 64 занимает цилиндр такого же диаметра, как и продолжающийся дистально от отверстия 81, интервенционное устройство может быть продвинуто через отверстие 81 без контакта с кончиком 64. При этом поле обзора массива 68 ультразвуковых преобразователей может поддерживаться в фиксированном совмещении с корпусом 54 катетера, в то время как интервенционное устройство продвигают внутрь корпуса 54 катетера через отверстие 81, и в поле обзора формирования изображения массива 68 ультразвуковых преобразователей.
При переднем обзоре поле обзора массива 68 ультразвуковых преобразователей может охватывать область, в которой интервенционное устройство может быть вставлено через канал 82. При этом массив 68 ультразвуковых преобразователей может работать так, чтобы помогать устанавливать положение и выполнять операции с помощью интервенционного устройства.
Отклоняющийся элемент 52 может отклоняться вокруг оси 92 отклонения (ось 92 отклонения совпадает с точкой обзора на фиг.5D и поэтому представлена, как точка). Ось 92 отклонения может быть определена, как точка, фиксированная относительно участка 84 контакта с трубчатым корпусом, вокруг которого поворачивается опорный участок 88. Как показано на фиг.5D, ось 92 отклонения может быть смещена от центральной оси 91 внешнего трубчатого корпуса 79. Для любого заданного отклонения отклоняющегося элемента 52 дуга 93 смещения может быть определена, как дуга минимального постоянного радиуса, которая расположена по касательной к стороне отклоняющегося элемента 52 и по касательной к прямой линии, которая совпадает с центральной осью 91 катетера в наиболее дистальной точке катетера. В варианте осуществления катетера 50, отношение максимального размера в поперечном сечении дистального конца внешнего трубчатого корпуса 79 к радиусу дуги 93 смещения при отклонении на 90° от центральной оси 91 может составлять, по меньшей мере, приблизительно 1.
Отклоняющийся элемент 52 может отклоняться вокруг оси 92 отклонения таким образом, что массив 68 ультразвукового преобразователя будет расположен проксимально отверстию 81. Такая установка, совместно с малой дугой 93 смещения, уменьшает расстояние, на которое требуется перемещать интервенционное устройство между появлением из отверстия 81 и вводом в поле обзора массива 68 ультразвуковых преобразователей. Например, после отклонения на 90°, как показано на фиг.5D, массив 68 ультразвукового преобразователя может быть установлен таким образом, что акустическая сторона массива 68 ультразвуковых преобразователей будет находиться на расстоянии от отверстия 81 (измеряемом вдоль центральной оси 91), которое меньше, чем максимальный размер поперечного сечения дистального конца внешнего трубчатого корпуса 79.
Как показано на фиг.5С и 5D, гибкая плата 76 может оставаться взаимно соединенной с корпусом 54 катетера и отклоняющимся элементом 52, независимо от отклонения отклоняющего элемента 52.
На фиг.5Е показан вариант осуществления корпуса 54 катетера. Корпус 54 катетера, как показано на чертеже, содержит внутренний трубчатый корпус 80 и внешний трубчатый корпус 79. В представленном варианте осуществления изобретения внешний трубчатый корпус 79 содержит все компоненты, показанные на фиг.5Е, за исключением внутреннего трубчатого корпуса 80. Для иллюстрации на фиг.5Е участки различных слоев были удалены для того, чтобы открыть конструкцию корпуса 54 катетера. Внешний трубчатый корпус 79 может включать в себя внешнее покрытие 94. Внешнее покрытие 94 может представлять собой, например, материал с высоким напряжением пробоя. В примерной конфигурации внешнее покрытие 94 может содержать, по существу, непористую композитную пленку, включающую в себя расширенный политетрафторэтилен (ePTFE) со слоем термоклея из этиленфторэтиленперфторида на одной стороне. Примерная конфигурация может иметь ширину приблизительно 25 мм, толщину приблизительно 0,0025 мм, давление насыщения изопропилового спирта, большее, чем приблизительно 0,6 МПа, и предел прочности на растяжение приблизительно 309 МПа в направлении длины (например, в самом прочном направлении). Внешнее покрытие 94 может обладать хорошей смазываемостью с тем, чтобы помочь при проходе внешнего трубчатого корпуса 79 через тело пациента. Внешнее покрытие 94 может обеспечить высокое напряжение пробоя (например, внешнее покрытие 94 может выдерживать напряжение, по меньшей мере, приблизительно 2500 В переменного напряжения).
В примерной компоновке внешнее покрытие 94 может включать в себя множество спирально намотанных пленок. Первый участок множества пленок может быть намотан в первом направлении, а второй участок пленок может быть намотан во втором направлении, которое противоположно первому направлению. Когда каждая пленка из множества пленок имеет продольный модуль упругости, по меньшей мере, приблизительно 6895 МПа и поперечный модуль упругости, по меньшей мере, приблизительно 137.9 МПа, каждая пленка из множества пленок может быть намотана вокруг центральной оси трубчатого корпуса под углом меньше, чем приблизительно 20° относительно центральной оси трубчатого корпуса 79.
Внутри внешнего покрытия 94 может быть расположен внешний слой 96 с низкой диэлектрической постоянной. Внешний слой 96 с низкой диэлектрической постоянной может уменьшать емкость между элементом 104 электрического соединения и материалами (например, кровью) за пределами внешнего покрытия 94. Внешний слой 96 с низкой диэлектрической постоянной может иметь диэлектрическую постоянную меньше, чем приблизительно 2,2. В одном варианте осуществления изобретения внешний слой 96 с низкой диэлектрической постоянной может иметь толщину приблизительно 0,07-0,15 мм. В одном варианте осуществления изобретения внешний слой 96 с низкой диэлектрической постоянной может содержать пористый материал, такой как ePTFE. Полости в пористом материале могут быть заполнены материалом с низкой диэлектрической постоянной, таким как воздух.
В примерном варианте осуществления изобретения объединенные свойства внешнего покрытия 94 и внешнего слоя 96 с низкой диэлектрической постоянной могут иметь максимальную толщину 0,13 мм и модуль упругости 237,9 МПа. При этом, внешнее покрытие 94 и внешний слой 96 с низкой диэлектрической постоянной можно рассматривать, как один слой композитного материала, включающий в себя два подслоя (внешнее покрытие 94 и внешний слой 96 с низкой диэлектрической постоянной).
При перемещении в направлении к центру внешнего трубчатого корпуса 79 следующий слой может представлять собой первый связующий слой 97. Первый связующий слой 97 может содержать пленочный материал, который может иметь температуру плавления ниже, чем у других компонентов внешнего трубчатого корпуса 79. Во время изготовления внешнего трубчатого корпуса 79 первый связующий слой 97 может быть избирательно расплавлен для получения взаимно соединенной структуры. Например, избирательное плавление первого связующего слоя 97 может использоваться для закрепления внешнего слоя 96 с низкой диэлектрической постоянной, первого связующего слоя 97 и слоя 98 экрана (описан ниже) друг с другом.
При перемещении в направлении центра внешнего трубчатого корпуса 79, следующий слой может представлять собой слой 98 экрана. Слой 98 экрана может использоваться для уменьшения электрического излучения от внешнего трубчатого корпуса 79. Слой 98 экрана может использоваться для экранирования внутренних компонентов для слоя 98 экрана (например, элемента 104 электрического соединения) от внешних электрических шумов. Слой 98 экрана может быть выполнен в форме проводного экрана или оплетки двойного использования. В примерном варианте осуществления слой 98 экрана может иметь толщину приблизительно 0,05-0,08 мм. При перемещении в направлении к центру внешнего трубчатого корпуса 79, следующий слой может представлять собой второй связующий слой 100. Второй связующий слой 100 может содержать пленочный материал, который может иметь температуру плавления ниже, чем у других компонентов внешнего трубчатого корпуса 79. Во время изготовления внешнего трубчатого корпуса 79 второй связующий слой 100 может быть избирательно расплавлен для получения взаимно соединенной структуры.
Под вторым связующим слоем 100 может находиться элемент 104 электрического соединения. Элемент 104 электрического соединения может содержать множество проводников, расположенных рядом друг с другом с изолирующим (например, непроводящим) материалом между проводниками. Элемент 104 электрического соединения может содержать один или несколько микроминиатюрных плоских кабелей. Элемент 104 электрического соединения может содержать любое соответствующее количество проводников, расположенных рядом друг с другом. В качестве примера элемент 104 электрического соединения может содержать 32 или 64 проводника, расположенных рядом друг с другом. Элемент 104 электрического соединения может быть расположен по спирали внутри внешнего трубчатого корпуса 79. При этом элемент 104 электрического соединения может быть расположен в виде спирали внутри стенки внешнего трубчатого корпуса 79. Элемент 104 электрического соединения может быть расположен в виде спирали таким образом, что ни одна часть элемента 104 электрического соединения не накладывается сама на себя. Элемент 104 электрического соединения может продолжаться от проксимального конца 55 катетера 50 до дистального конца 53 внешнего трубчатого корпуса 79. В одном варианте осуществления изобретения элемент 104 электрического соединения может быть расположен параллельно центральной оси внешнего трубчатого корпуса 79 и вдоль нее.
Как показано на фиг.5Е, может присутствовать зазор шириной Y между витками, спирально намотанного элемента 104 электрического соединения. Кроме того, элемент 104 электрического соединения может иметь ширину X, как показано на фиг.5Е. Элемент 104 электрического соединения может быть спирально расположен таким образом, что отношение ширины Х к ширине Y больше, чем 1. При такой компоновке спирально расположенный элемент 104 электрического соединения может обеспечивать существенную механическую прочность и свойства гибкости для внешнего трубчатого корпуса 79. Это может, в определенных вариантах осуществления изобретения исключить или уменьшить необходимость в отдельном слое усиления во внешнем трубчатом корпусе 79. Кроме того, зазор Y может изменяться вдоль длины внешнего трубчатого корпуса 79 (например, непрерывно или в одном или нескольких отдельных витках). Например, может быть предпочтительным иметь большую жесткость внешнего трубчатого корпуса 79 в направлении проксимального конца внешнего трубчатого корпуса 79. В соответствии с этим, зазор Y может быть изготовлен меньшим в направлении проксимального конца внешнего трубчатого корпуса 79.
Внутренний связующий слой 102 может быть расположен внутри элемента 104 электрического соединения. Внутренний связующий слой 102 может быть выполнен аналогично и может выполнять аналогичную функцию, как и второй связующий слой 100. Внутренний связующий слой 102 может иметь точку плавления, например, 160°. При перемещении в направлении центра внешнего трубчатого корпуса 79, следующий слой может представлять собой внутренний слой 106 с низкой диэлектрической постоянной. Внутренний слой 106 с низкой диэлектрической постоянной может быть выполнен аналогично и может использоваться для аналогичной функции, как и внешний слой 96 с низкой диэлектрической постоянной. Внутренний слой 106 с низкой диэлектрической постоянной во время работы может уменьшать емкость между элементом 104 электрического соединения и материалами (например, кровью, интервенционным устройством) внутри внешнего трубчатого корпуса 79. При перемещении в направлении центра внешнего трубчатого корпуса 79, следующий слой может представлять собой внутреннее покрытие 108.
Внутреннее покрытие 108 может быть выполнено аналогично и может использовать для аналогичной функции, как внешнее покрытие 94. Внутреннее покрытие 108 и внешнее покрытие 94 могут иметь общую толщину самое большее приблизительно 0,05 мм. Кроме того, внутреннее покрытие 108 и внешнее покрытие 94 могут иметь комбинированный модуль упругости, по меньшей мере, приблизительно 2379 МПа. В комбинации внутреннее покрытие 108 и внешнее покрытие 94 могут обеспечивать сопротивление удлинения такое, что растягивающая нагрузка, приложенная к внутреннему покрытию 108 и к внешнему покрытию 94, равная приблизительно 13 Н, приводит не больше, чем к 1% удлинения трубчатого корпуса 79. В такой компоновке трубчатый корпус 79 может обеспечивать такое сопротивление удлинения, что нагрузка растяжения, приложенная к трубчатому корпусу 79, равная приблизительно 13 Н, приводит не более чем к 1% удлинения трубчатого корпуса 79, и в такой компоновке, по меньшей мере, приблизительно 80% сопротивления удлинения может обеспечиваться внутренним покрытием 108 и внешним покрытием 94.
Внутреннее покрытие 108 и внешнее покрытие 94 могут проявлять, по существу, однородный профиль растяжения вокруг их внешних контуров и вдоль длины трубчатого корпуса 79, когда нагрузку растяжения прикладывают к трубчатому корпусу 79. Такой однородный отклик на приложенную нагрузку растяжения может, помимо прочего, помочь уменьшить нежелательное направленное смещение корпуса 54 катетера во время его установки (например, вставки в тело пациента) и использования (например, при отклонении отклоняющегося элемента 52).
Как и в отношении внешнего покрытия 94 и внешнего слоя 96 с низкой диэлектрической постоянной, внутренний слой 106 с низкой диэлектрической постоянной и внутреннее покрытие 108 можно рассматривать, как подслои для одного слоя композитного материала.
Связующие слои (первый связующий слой 97, второй связующий слой 100 и внутренний связующий слой 102) могут иметь, по существу, одинаковую точку плавления. При этом, во время сборки, корпус 54 катетера может быть подвергнут воздействию повышенной температуры, которая может плавить каждый из связующих слоев одновременно и фиксировать различные слои корпуса 54 катетера относительно друг друга. В качестве альтернативы, связующие слои могут иметь разные точки плавления, позволяющие выполнять избирательное плавление одного или двух из связующих слоев, оставляя другой связующий слой или связующие слои нерасплавленными. В соответствии с этим, варианты осуществления корпусов 54 катетера могут содержать ноль, один, два, три или более связующих расплавленных слоев для закрепления различных слоев корпуса 54 катетера на других слоях корпуса 54 катетера.
Каждый из упомянутых выше слоев (от внешнего покрытия 94 до внутреннего покрытия 108) может быть зафиксирован относительно другого. Вместе эти слои могут формировать внешний трубчатый корпус 79. Внутри этих слоев и при движении относительно этих слоев может быть распложен внутренний трубчатый корпус 80. Внутренний трубчатый корпус 80 может быть размещен так, что остается определенный зазор между внешней поверхностью внутреннего трубчатого корпуса 80 и внутренней поверхностью внутреннего покрытия 108. Внутренний трубчатый корпус 80 может представлять собой трубку оплетки из армированного полиэфирблокамида (например, полиэфирблокамида из материала РЕВАХ®, поставляемого компанией Arkema Inc., Philadelphia, PA). Внутренний трубчатый корпус 80 может быть армирован плетеным или намотанным армирующим элементом. Внутренний трубчатый корпус 80 может обладать адекватной прочностью колонки, так, чтобы он мог выполнять передачу поперечного движения ползунка 58 вдоль длины внутреннего трубчатого корпуса 80 таким образом, чтобы отклоняющийся элемент 52 мог быть активирован относительно движения внутреннего трубчатого корпуса 80, где находится граница перехода с держателем 74 на участке 84 границы перехода трубчатого корпуса. Внутренний трубчатый корпус 80 может также выполнять функцию поддержки формы канала 82, продолжающегося через длину внутреннего трубчатого корпуса 80 во время отклонения отклоняющегося элемента 52. В соответствии с этим, пользователь 50 катетера может иметь возможность выбора и управления величиной отклонения отклоняющегося элемента 52 путем манипуляции с ручкой 56. Канал 82 может иметь центральную ось, выровненную с центральной осью 91 внешнего трубчатого корпуса 79.
Для того чтобы помочь уменьшить силы активации (например, силы перемещения внутреннего трубчатого корпуса 80 относительно внешнего трубчатого корпуса 79), внутренняя поверхность внутреннего покрытия 108, внешняя поверхность внутреннего трубчатого корпуса 80 или обе могут включать в себя слой уменьшения трения. Слой уменьшения трения может быть выполнен в виде одного или нескольких покрытий с хорошей смазываемостью и/или дополнительные слои.
В вариации варианта осуществления изобретения, показанной на фиг.5Е, внутренний трубчатый корпус 80 может быть заменен внешним трубчатым корпусом, который расположен снаружи от внешнего покрытия 94. В таком варианте осуществления изобретения компоненты внешнего трубчатого корпуса 79 (от внешнего покрытия 94 до внутреннего покрытия 108) могут оставаться, по существу, без изменения того, что показано на фиг.5Е (диаметры компонентов могут быть несколько уменьшены для поддержания аналогичных общих внутреннего и внешнего диаметров корпуса 54 катетера). Внешний трубчатый корпус может быть размещен за пределами внешнего покрытия 94 и может быть выполнен подвижным относительно внешнего покрытия 94. Такое относительное движение может способствовать отклонению отклоняющегося элемента 52, аналогично тому, что описано со ссылкой на фиг.5А-5D. В таком варианте осуществления изобретения элемент 104 электрического соединения может представлять собой часть внешнего трубчатого корпуса 79, которая могла бы быть расположена внутри внешнего трубчатого корпуса. Внешний трубчатый корпус может быть построен аналогично внутреннему трубчатому корпусу 80, описанному выше.
В примерном варианте осуществления изобретения корпус 54 катетера может иметь емкость меньше, чем 2000 пФ. В варианте осуществления корпус 54 катетера может иметь емкость приблизительно 1600 пФ. В описанном выше варианте осуществления изобретения, показанном на фиг.5Е, внешнее покрытие 94 и внешний слой 96 с низкой диэлектрической постоянной, в комбинации, может обладать способностью выдерживать напряжение, по меньшей мере, приблизительно 2500 В переменного напряжения. Аналогично, внутреннее покрытие 108 и внутренний слой 106 с низкой диэлектрической постоянной, в комбинации, могут противостоять напряжению, по меньшей мере, приблизительно 2500 В переменного напряжения. В других вариантах осуществления изобретения могут достигаться другие выдерживаемые напряжения, в результате, например, изменения толщины покрытия и/или слоев с низкой диэлектрической постоянной. В примерном варианте осуществления изобретения внешний диаметр внешнего трубчатого корпуса 79, например, может составлять приблизительно 12,25 Fr. Внутренний диаметр внутреннего трубчатого корпуса может, например, составлять приблизительно 8,4 Fr.
Корпус 54 катетера может иметь диаметр перегиба (диаметр изгиба корпуса 54 катетера, меньше которого происходит перегиб корпуса 54 катетера) меньше, чем десятикратное значение диаметра корпуса 54 катетера. Такая конфигурация соответствует анатомическому размещению корпуса 54 катетера.
Используемый здесь термин "внешний трубчатый корпус" относится к самому внешнему слою корпуса катетера и всем слоям корпуса катетера, расположенным для перемещения с самым внешним слоем. Например, в корпусе 54 катетера, как показано на фиг.5Е, внешний трубчатый корпус 79 включает в себя все представленные слои корпуса 54 катетера, за исключением внутреннего трубчатого корпуса 80. В общем, в вариантах осуществления, где отсутствует внутренний трубчатый корпус, внешний трубчатый корпус может совпадать с корпусом катетера.
Различные слои внешнего трубчатого корпуса 79, описанные со ссылкой на фиг.5Е, могут, в соответствующих случаях, быть изготовлены путем спиральной намотки полос материала вдоль корпуса 54 катетера. В одном варианте осуществления изобретения выбранные слои могут быть намотаны в направлении, противоположном другим слоям. В результате избирательной намотки слоев в соответствующих направлениях, некоторые физические свойства корпуса 54 катетера (например, жесткость) могут быть избирательно изменены.
На фиг.5F показан вариант осуществления электрического соединения между спирально расположенным элементом 104 электрического соединения и гибкой платой 76 (гибкий/изгибаемый элемент электрического соединения). С пояснительной целью все части корпуса 54 катетера, за исключением элемента 104 электрического соединения и гибкой платы 76, не показаны на фиг.5F. Гибкая плата 76 может иметь изогнутый участок 109. Изогнутый участок 109 может быть изогнут так, чтобы он соответствовал кривизне внешнего трубчатого корпуса 79. Изогнутый участок 109 гибкой платы 76 может быть расположен внутри внешнего трубчатого корпуса 79 на конце внешнего трубчатого корпуса 79, проксимальном к отклоняющемуся элементу 52 в том же положении относительно слоев внешнего трубчатого корпуса 79, что и элемент 104 электрического соединения. В соответствии с этим, изогнутый участок 109 гибкой платы 76 может входить в контакт с элементом 104 электрического соединения. При этом дистальный конец элемента 104 электрического соединения может быть взаимно соединен с гибкой платой 76 в области 110 соединения.
В области 110 соединения электропроводные участки (например, провода) элемента 104 электрического соединения могут быть взаимно соединены с электропроводными участками (например, дорожками, электропроводными путями) гибкой платы 76. Такое электрическое взаимное соединение может быть достигнуто путем отслоения или удаления некоторой части изолирующего материала элемента 104 электрического соединения и контакта открытых электропроводных участков с соответствующими открытыми электропроводными участками на гибкой планке 76. Конец элемента 104 электрического соединения и открытые электропроводные участки элемента 104 электрического соединения могут быть расположены под углом относительно ширины элемента 104 электрического соединения. При этом шаг (например, расстояние между центрами электропроводных участков) между открытыми электропроводными участками гибкой платы 76 может быть больше, чем шаг (измеренный по ширине) элемента 104 электрического соединения, при поддержании электрического соединения между каждым проводником, как элемента 104 электрического соединения, так и гибкой платы 76.
Как показано на фиг.5F, гибкая плата 76 может содержать гибкую или изгибающуюся область 112, которая имеет меньшую ширину, чем ширина элемента 104 электрического соединения. Как можно видеть, ширина каждого отдельного электропроводного пути через гибкую область 112 может быть меньшей, чем ширина каждого электропроводного элемента в пределах элемента 104 электрического соединения. Кроме того, шаг между каждым электропроводным элементом внутри гибкой области 112 может быть меньшим, чем шаг элемента 104 электрического соединения.
Гибкая область 112 может быть взаимно соединена с областью 114 стыка массива с гибкой планкой 76, через которую электропроводные дорожки элемента 104 электрического соединения и гибкой платы 76 могут быть электрически соединены с отдельными преобразователями массива 68 ультразвуковых преобразователей.
Как показано на фиг.5С и 5D, гибкая область 112 гибкой платы 76 может во время работы изгибаться при отклонении отклоняющегося элемента 52. В этом отношении, гибкая область 112 может изгибаться в ответ на отклонение отклоняющегося элемента 52. Отдельные проводники элемента 104 электрического соединения могут оставаться в электрической связи с отдельными преобразователям массива 68 ультразвуковых преобразователей во время отклонения отклоняющегося элемента 52.
В одном варианте осуществления изобретения элемент 104 электрического соединения может состоять из двух или более отдельных наборов проводников (например, двух или более микроминиатюрных плоских кабелей). В таком варианте осуществления изобретения каждый из отдельных наборов проводников может быть взаимно соединен с гибкой платой 76, аналогично показанному на фиг.5F. Кроме того, элемент 104 электрического соединения (либо одиночный элемент 104 электрического соединения, как показано на фиг.5F, или элемент 104 электрического соединения, соответствующий множеству, в общем, параллельных отдельных кабелей), может содержать элементы, которые продолжаются от дистального конца 53 к проксимальному концу 55 корпуса 54 катетера, или элемент 104 электрического соединения могут содержать множество отдельных, взаимно соединенных последовательно элементов, которые вместе продолжаются от дистального конца 53 до проксимального конца 55 корпуса 54 катетера. В одном варианте осуществления изобретения гибкая плата 76 может включать в себя элемент 104 электрического соединения. В таком варианте осуществления изобретения гибкая плата 76 может иметь спирально намотанный участок, продолжающийся от дистального конца 53 к проксимальному концу 55 корпуса 54 катетера. В таком варианте осуществления изобретения не требуется никакого соединения электрических проводников (например, между гибкой печатной платой 76 и микроминиатюрным плоским кабелем) между областью 114 границы перехода массива и проксимальным концом корпуса 54 катетера.
На фиг.6А-6D показан вариант осуществления катетера, который включает в себя отклоняющийся элемент 116, отклоняющийся путем перемещения удлиненного элемента относительно внешнего трубчатого корпуса 118. Следует понимать, что вариант осуществления изобретения, показанный на фиг.6А-6D, не включает в себя внутренний трубчатый корпус, и внешний трубчатый корпус 118 также может характеризоваться как корпус катетера.
Отклоняющийся элемент 116 может быть избирательно отклоняющимся. Как показано на фиг.6А, представленный отклоняющийся элемент 116 включает в себя кончик 120. Кончик 120 может включать в себя массив 68 ультразвуковых преобразователей и может включать в себя закругленный дистальный конец 66 и отверстие 70 для направляющего провода, аналогично кончику 64, описанному со ссылкой на фиг.5В. Как и с кончиком 64 на фиг.5В, массив 68 ультразвуковых преобразователей может находиться в положении бокового обзора, когда отклоняющийся элемент 116 выровнен с внешним трубчатым корпусом 118. При этом массив 68 ультразвуковых преобразователей может во время работы формировать изображение анатомических ориентиров во время вставки катетера, с тем, чтобы помочь при направлении и/или установке положения внешнего трубчатого корпуса 118.
Внешний трубчатый корпус 118 может включать в себя канал 128, который во время работы позволяет пропускать через него интервенционное устройство. По меньшей мере, участок отклоняющегося элемента 116 может быть постоянно расположен дистально дистальному концу с внешним трубчатым корпусом 118. В варианте осуществления полностью отклоняющийся элемент 116 может быть постоянно расположен дистально дистальному концу внешнего трубчатого корпуса 118.
Отклоняющийся элемент 116 может отклоняться относительно внешнего трубчатого корпуса 118. При этом отклоняющийся элемент 116 может быть взаимно соединен с одним или несколькими удлиненными элементами для управления движением отклоняющегося элемента 116, как если бы он отклонялся. Удлиненный элемент может также принимать форму вытяжного провода 130. Вытяжной провод 130 может представлять собой круглый провод. В качестве альтернативы, например, вытяжной провод 130 может быть прямоугольным в поперечном сечении. Например, вытяжной провод может быть прямоугольным в поперечном сечении с отношением ширины к толщине приблизительно 5 к 1.
Как и в варианте осуществления катетера, показанном на фиг.5В-5Е, катетер по фиг.6А-6D может включать в себя держатель 126, который поддерживает массив 68 ультразвуковых преобразователей. Держатель 126 может взаимно соединять отклоняющийся элемент 116 с внешним трубчатым корпусом 118. Гибкая плата 122 может содержать электрические соединения, во время работы электрически соединяющие массив 68 ультразвуковых преобразователей с элементом 104 электрического соединения (показан на фиг.6D), расположенным внутри внешнего трубчатого корпуса 118. Открытый участок гибкой платы 122 может быть инкапсулирован аналогично гибкой плате 76, описанной выше.
Внешний трубчатый корпус 118 может включать в себя дистальный участок 124. Дистальный участок 124 может содержать множество обернутых слоев, расположенных вокруг участка 133 крепления (показан на фиг.6В и 6С) держателя 126. Слои обмотки могут использоваться для закрепления участка 133 крепления на внутреннем участке внешнего трубчатого корпуса 118, как описано ниже со ссылкой на фиг.6D.
Отклонение отклоняющегося элемента 116 будет теперь описано со ссылкой на фиг.6В и 6С. На фиг.6В и 6С показан отклоняющийся элемент 116 с участком кончика 120, окружающим массив 68 ультразвукового изображения и удаленный держатель 126. Кроме того, удален дистальный участок 124 внешнего трубчатого корпуса 118, обернутый вокруг участка 133 крепления. Держатель 126 может быть выполнен аналогично держателю 74, описанному выше. Держатель 126 может дополнительно включать в себя шарнирный участок 131, аналогичный шарнирному участку 86.
Для отклонения отклоняющегося элемента 116 относительно внешнего трубчатого корпуса 118, вытяжной провод 130 может перемещаться относительно внешнего трубчатого корпуса 118. Как показано на фиг.6С, вытягивание вытяжного провода 130 (например, в направлении ручки 56) может прикладывать усилие к держателю 126 в точке 132 крепления вытяжного провода вдоль вытяжного провода 130 в направлении выходного отверстия 134 вытяжного провода. Выходное отверстие 134 вытяжного провода представляет собой точку, где вытяжной провод 130 появляется из корпуса 136 вытяжного провода. Корпус 136 вытяжного провода может быть зафиксирован на внешнем трубчатом корпусе 118. Такое усилие может привести к изгибу отклоняющегося элемента 116 в направлении выходного отверстия 134 вытяжного провода. Как и в одном варианте осуществления изобретения, показанном на фиг.5С и 5D, отклонение отклоняющегося элемента будет ограничено шарнирным участком 131 держателя 126. Как показано на фиг.6С, полученное в результате отклонение отклоняющегося элемента 116 может привести к шарнирному повороту массива 68 ультразвуковых преобразователей в направлении переднего обзора. Следует понимать, что изменяющиеся величины отклонения отклоняющегося элемента 116 могут быть достигнуты в результате управляемого движения вытяжного провода 130. При этом любой угол отклонения от 0 до 90° может быть достигнут путем перемещения вытяжного провода 130 на меньшую величину, чем как показано на фиг.6С. Кроме того, отклонения, большие чем на 90°, могут быть получены при перемещении вытяжного провода 130 на большую величину, чем представлено на фиг.6С. Как показано на фиг.6В и 6С, гибкая плата 122 может оставаться взаимно соединенной с внешним трубчатым корпусом 118 и отклоняющимся элементом 116, независимо от отклонения отклоняющегося элемента 116.
На фиг.6D показан вариант осуществления внешнего трубчатого корпуса 118. С целью иллюстрации, на фиг.6D участки различных слоев были удалены для того, чтобы раскрыть конструкцию внешнего трубчатого корпуса 118. Слои, аналогичные показанным в одном варианте осуществления изобретения, изображенном на фиг.5Е, помечены теми же номерами ссылочных позиций, что и на фиг.5Е, и не будут подробно описаны здесь. Корпус 136 вытяжного провода, в котором расположен вытяжной провод 130, может прилегать к внешнему покрытию 94. Внешняя обертка 138 может быть затем расположена поверх внешнего покрытия 94 и корпуса 136 вытяжного провода, для закрепления корпуса 136 вытяжного провода на внешнем покрытии 94. В качестве альтернативы, корпус 136 вытяжного провода и вытяжной провод 130 могут, например, быть расположены между внешним покрытием 94 и внешним слоем 96 с низкой диэлектрической постоянной. В таком варианте осуществления изобретения внешняя обертка 138 может не потребоваться. Могут использоваться другие соответствующие места расположения корпуса 136 вытяжного провода и вытяжного провода 130.
Внутри внешнего слоя 96 с низкой диэлектрической постоянной может быть расположен слой 98 экрана. Первый связующий слой (не показанный на фиг.6D), аналогичный первому связующему слою 97, может быть расположен между внешним слоем 96 с низкой диэлектрической постоянной и слоем 98 экрана. Внутри от слоя экрана может быть расположен второй связующий слой 100. Внутри второго связующего слоя 100 может быть расположен элемент 104 электрического соединения. Внутри элемента 104 электрического соединения может быть внутренний слой 142 с низкой диэлектрической постоянной. При этом элемент 104 электрического соединения может быть расположен по спирали внутри стенки внешнего трубчатого корпуса 118.
При перемещении в направлении центра внешнего трубчатого корпуса 118, следующий слой может представлять собой свернутый в спираль усилительный слой 144.
Свернутый в спираль усилительный слой 144 может, например, содержать обмотку из нержавеющей стали. В примерном варианте осуществления изобретения смотанный в спираль усилительный слой 144 может иметь толщину приблизительно от 0,05 до 0,08 мм. При дальнейшем перемещении в направлении центра внешнего трубчатого корпуса 118, следующий слой может представлять собой внутреннее покрытие 146. Внутреннее покрытие 146 может быть выполнено аналогично и может выполнять аналогичную функцию, что и у внешнего покрытия 94. Канал 128 может иметь центральную ось, выровненную с центральной осью внешнего трубчатого корпуса 118.
Как отмечено выше, слои обмотки дистального участка 124 внешнего трубчатого корпуса 118 могут использоваться для закрепления участка 133 крепления держателя 126 на внутреннем участке внешнего трубчатого корпуса 118. Например, каждый слой, за пределами элемента 104 электрического соединения, может быть удален на дистальном участке 124. Кроме того, элемент 104 электрического соединения может быть электрически соединен с гибкой планкой 122 вблизи дистального участка 124, аналогично тому, как описано со ссылкой на фиг.5F. В соответствии с этим, участок 133 крепления держателя 126 может быть установлен поверх остальных внутренних слоев (например, внутреннего слоя 142 с низкой диэлектрической постоянной, намотанного в виде спирали усилительного слоя 144 и внутреннего покрытия 146) и множество слоев материала могут быть обмотаны вокруг дистального участка 124 для закрепления участка 133 крепления на внешнем трубчатом корпусе 118.
Внешний диаметр внешнего трубчатого корпуса 118, например, может составлять приблизительно 12,25 Fr. Внутренний диаметр внешнего трубчатого корпуса 118 может составлять, например, приблизительно 8,4 Fr.
На фиг.7А и 7В демонстрируются дополнительные варианты осуществления изобретения. Как показано, катетер 30 содержит отклоняющийся дистальный конец 32. На дистальном отклоняющемся конце 32 расположен массив 37 ультразвуковых преобразователей. Катетер также включает в себя провод 33, прикрепленный к массиву 37 ультразвуковых преобразователей, продолжающийся до проксимального конца катетера 30, где он выходит через отверстие на проксимальном конце катетера 30. Как показано на фиг.7А, массив 37 ультразвуковых преобразователей имеет конфигурацию бокового обзора. Катетер может быть подан на место обработки с массивом 37 ультразвуковых преобразователей в конфигурации с боковым обзором, как показано на фиг.7А. После достижения места обработки, провод 33 может быть вытянут в проксимальном направлении для отклонения отклоняющегося дистального конца 32, в результате чего массив 37 ультразвуковых преобразователей перемещается в конфигурацию с передним обзором, как показано на фиг.7В. Как показано на фиг.7В, после установки массива 37 ультразвуковых преобразователей в положение переднего обзора и отклонения отклоняющегося дистального конца 32, как показано, в общем расположенный в центре канал 38 затем будет доступен для подачи соответствующего интервенционного устройства в точку, удаленную от дистального конца 32 катетера. В качестве альтернативы, трубка, содержащая канал 38 и перемещающаяся относительно внешней поверхности катетера 30, может использоваться для отклонения отклоняющегося дистального конца 32 в конфигурации обзора вперед.
На фиг.8А показан вид спереди однолепестковой конфигурации устройства, показанного на фиг.7А и 7В. На фиг.8В показана двухлепестковая конфигурация катетера, представленного на фиг.7А и 7 В. На фиг.8С показана трехлепестковая конфигурация, и на фиг.8D показана четырехлепестковая конфигурация. Следует понимать, что любое соответствующее количество лепестков может быть построено в соответствии с пожеланиями. Кроме того, в многолепестковых конфигурациях массивы 37 ультразвуковых преобразователей могут быть расположены на одном или нескольких лепестках.
Дополнительные варианты осуществления изобретения показаны на фиг.9, 9А и 9В. На фиг.9 показан катетер 1, имеющий массив 7 ультразвуковых преобразователей, рядом с его дистальным концом. Массив 7 ультразвуковых преобразователей закреплен на катетере 1 с помощью шарнира 9. Электрические провода 4 соединены с массивом 7 ультразвукового преобразователя и продолжаются к проксимальному концу катетера 1. Катетер 1 включает в себя дистальное отверстие 13. Шарнир 9 может быть расположен на дистальном конце массива 7 ультразвукового преобразователя, как показано на фиг.9А, или на проксимальном конце массива 7 ультразвуковых преобразователей, как показано на фиг.9 В. В любом случае, массив 7 ультразвуковых преобразователей может отклоняться либо пассивно, или активно, как описано выше. Массив 7 ультразвуковых преобразователей может отклоняться вверх в конфигурацию с передним обзором (как показано на фиг.9А и 9В), и интервенционное устройство может быть продвинуто, по меньшей мере, частично из дистального отверстия 13, таким образом, что, по меньшей мере, участок интервенционного устройства будет находиться в поле обзора массива 7 ультразвуковых преобразователей.
На фиг.10А и 10В демонстрируется дополнительный вариант осуществления изобретения, в котором катетер включает в себя массив 7 ультразвуковых преобразователей рядом с дистальным концом 2 катетера. Катетер дополнительно включает в себя управляемый участок 8 и канал 10. Канал 10 может иметь такие размеры, чтобы принимать соответствующее интервенционное устройство, которое может быть вставлено в проксимальный конец катетера и продвинуто через канал 10 и отверстие 13. Катетер может дополнительно включать в себя канал 16 приема направляющего провода. Канал 16 приема направляющего провода может включать в себя проксимальное отверстие 15 и дистальное отверстие 14, позволяя, таким образом, выполнять хорошо известный "быстрый обмен" соответствующими направляющими проводами.
Как дополнительно показано на фиг.11, 11А и 11В, управляемый участок 8 катетера может изгибаться в любом соответствующем направлении. Например, как показано на фиг.11А, управляемый участок изогнут от отверстия 13 и, как показано на фиг.11В, управляемый участок изогнут в направлении отверстия 13.
На фиг.12 демонстрируется еще один вариант осуществления изобретения. В частности, катетер 1 может включать в себя массив 7 ультразвуковых преобразователей, расположенный на дистальном конце 2 катетера 1. Электрические провода 4 закреплены на массиве 7 ультразвуковых преобразователей и продолжаются до проксимального конца катетера 1. Канал 19 расположен проксимально массиву 7 ультразвуковых преобразователей и включает в себя проксимальное отверстие 46 и дистальное отверстие 45. Канал 19 может иметь такие размеры, чтобы в нем можно было размещать соответствующий направляющий провод и/или интервенционное устройство. Канал 19 может быть построен из соответствующего полимерного трубчатого материала, такого как ePTFE. Электрические провода 4 могут быть размещены в центре катетера 1 или рядом с ним.
На фиг.13 показана блок-схема последовательности операций для варианта осуществления способа работы катетера, имеющего отклоняющееся устройство формирования изображения, расположенное на его дистальном конце. Первый этап 150 в способе может представлять собой движение дистального конца катетера от исходного положения в требуемое положение, в котором отклоняемое устройство формирования изображения размещено в первом положении во время этапа передвижения. Отклоняющееся устройство формирования изображения может быть установлено в режим работы с боковым обзором в первом положении. Этап движения может включать в себя введение катетера в тело через место введения, которое меньше, чем отверстие отклоняющегося устройства формирования изображения. Этап передвижения может включать в себя поворот катетера относительно его окружения.
Следующий этап 152 может представлять собой этап получения данных изображения из отклоняющегося устройства формирования изображения во время, по меньшей мере, части этапа движения. Этап получения может быть выполнен с отклоняющимся устройством формирования изображения, размешенным в первом положении. Во время этапов движения и получения может поддерживаться положение отклоняющегося устройства формирования изображения относительно дистального конца катетера. Таким образом, отклоняющееся устройство формирования изображения может перемещаться, и изображения могут быть получены без движения отклоняющегося устройства формирования изображения относительно дистального конца катетера. Во время этапа движения катетер, и поэтому, отклоняющиеся устройства формирования изображения, могут поворачиваться относительно их окружения. Такое вращение может обеспечить возможность для отклоняющегося устройства формирования изображения получать изображения во множестве разных направлений, поперечных пути, по которому перемешали катетер во время этапа движения.
Следующий этап 154 может применяться для использования данных изображения, для определения, когда катетер расположен в требуемом положении. Например, данные изображения могут обозначать положение отклоняющегося устройства формирования изображения, и, поэтому, дистального конца катетера относительно точки - ориентира (например, анатомической точки - ориентира).
На следующем этапе 156 отклоняющееся устройство формирования изображения может отклоняться из первого положения во второе положение. Этап отклонения может следовать после этапа перемещения. Отклоняющееся устройство формирования изображения может быть установлено в положение обзора вперед во втором положении. Отклоняющееся устройство формирования изображения может быть установлено под углом, по меньшей мере, приблизительно 45° относительно центральной оси катетера, находясь во втором положении. В случае необходимости, после этапа отклонения, отклоняющееся устройство формирования изображения может быть возвращено в первое положение и положение катетера может быть повторно изменено (например, повторение этапа 150 перемещения, этапа 152 получения и этапа 154 использования). После изменения положения этап 156 отклонения может быть повторен, и способ может продолжаться.
В одном варианте осуществления изобретения катетер может содержать внешний трубчатый корпус и устройство активации, каждое из которых продолжается от проксимального конца до дистального конца катетера. В таком варианте осуществления изобретения этап отклонения может включать в себя: перемещение проксимального конца, по меньшей мере, одного из внешнего трубчатого корпуса и устройства активации относительно проксимального конца другого внешнего трубчатого корпуса и устройства активации. Отклоняющееся устройство формирования изображения может быть взаимно соединено с возможностью опоры с помощью шарнира с одним из внешнего трубчатого корпуса и устройства активации, и этап отклонения может дополнительно включать применение силы отклонения к шарниру в ответ на этап перемещения. Кроме того, этап отклонения может дополнительно включать инициирование приложения силы отклонения к шарниру в ответ на этап перемещения. Сила отклонения может быть приложена и затем может поддерживаться в результате манипуляций с ручкой, взаимно соединенной с проксимальным концом катетера. Кроме того, этап приложения может содержать передачу силы отклонения с помощью устройства активации от проксимального конца на дистальный конец катетера сбалансированным и распределенным образом вокруг центральной оси внешнего трубчатого корпуса.
Следующий этап 158 может представлять собой подачу интервенционного устройства через отверстие на дистальном конце катетера и в поле обзора формирования изображения отклоняющегося устройства формирования изображения во втором положении. Поле обзора формирования изображения может поддерживаться, по существу, фиксировано с совмещением с дистальным концом катетера во время этапа подачи.
После подачи и использования интервенционного устройства (например, для выполнения процедуры, для установки или извлечения устройства, для выполнения измерения), интервенционное устройство может быть извлечено через отверстие. Отклоняющееся устройство формирования изображения может быть затем возвращено в первое положение. Возврату в первое положение может способствовать качество упругой деформации шарнира. Например, шарнир может быть смещен в направлении установки отклоняющегося устройства формирования изображения в первом положении. При этом когда отклоняющееся устройство формирования изображения находится во втором положении, и сила отклонения устранена, отклоняющееся устройство формирования изображения может вернуться в первое положение. После извлечения интервенционного устройства через отверстие (и, в случае необходимости, из всего катетера) и возврата отклоняющегося устройства формирования изображения в первое положение, катетер может затем быть повторно установлен и/или извлечен.
Также, что касается держателей 74, 126 представленных выше, держатели, описанные ниже, могут быть изготовлены из любого соответствующего материала, такого как, например, материал с памятью формы (например, Нитинол). Любой соответствующий трубчатый корпус, описанный здесь, может быть выполнен так, что он включает в себя любой соответствующий электрический элемент конфигурации. Например, когда это соответствует в вариантах осуществления изобретения, описанных ниже, внешние трубчатые корпуса могут содержать элементы электрического соединения, аналогичные элементу 104 электрического соединения на фиг.5Е.
Держатель 74 на фиг.5В-5D, держатель 126 на фиг.6А-6С и любой, аналогично выполненный держатель, раскрытый здесь, могут содержать вариации шарнирного участка 86, описанного со ссылкой на фиг.5В-5D, и шарнирного участка 131, описанного со ссылкой на фиг.6А-6С. Например, на фиг.14А-14С показаны три альтернативных конструкции шарнирного участка. На фиг.14А показан держатель 160, который включает в себя шарнирные участки 162а, 162b, которые выполнены конусообразными - шарнирные участки 162 a/b, становятся более тонкими по мере того, как расстояние от опорного участка 164 увеличивается в направлении участка 166 контакта с трубчатым корпусом.
На фиг.14В показан держатель 168, включающий в себя шарнирные участки 170а, 170b, которые выполнены зубчатыми и расположены в пределах изогнутой плоскости участка 172 контакта с трубчатым корпусом. На фиг.14С показан держатель 174, который включает в себя единый шарнирный участок 176. Единый шарнирный участок 176 выполнен зубчатым так, что узкий участок располагается рядом с его средней точкой. Кроме того, единый шарнирный участок 176 изогнут так, что участок единого шарнирного участка 176 располагается внутри трубки, определенной участком 178 контакта с трубчатым корпусом и продолжающейся от него. На фиг.14D показан держатель 179, который включает в себя шарнирные участки 181 а, 181b, участок 185 контакта с трубчатым корпусом и опорный участок 183. Опорный участок 183 включает в себя плоский участок 187 и два боковых участка 189а, 189b, ориентированных, в общем, перпендикулярно плоскому участку 187. Такие варианты конструкции, как показано на фиг.14А-14D, могут обеспечивать удовлетворительные циклы в отношении отказа (например, циклы изгиба), боковой жесткости и жесткости к угловому изгибу, при поддержании деформации и пластической деформации в пределах допустимых уровней.
На фиг.15 показан держатель 180, который включает в себя пару зигзагообразных шарнирных участков 182а, 182b. Такая конструкция позволяет поддерживать адекватную ширину шарнирного участка 182а, 182b и толщину, обеспечивая при этом большую эффективную длину консольного изгиба, уменьшая, таким образом, уровень силы, требуемой для отклонения опорного участка 184 относительно участка 186 контакта с трубчатым корпусом. Также могут использоваться другие соответствующие конфигурации, где эффективная длина изгиба кронштейна может быть увеличена (по сравнению с прямым шарнирным участком).
На фиг.16 показан катетер 188, который включает в себя внутренний трубчатый корпус 190 и внешний трубчатый корпус 192. На внутреннем трубчатом корпусе 190 закреплен держатель 194, который поддерживает отклоняющийся элемент 196. Держатель 194 включает в себя участок 198 контакта с трубчатым корпусом, который закреплен на внутреннем трубчатом корпусе 190, используя любой соответствующий способ крепления, такой как, например, обжим и/или приклеивание. Держатель 194 дополнительно включает в себя два шарнирных участка: первый шарнирный участок 200а и второй шарнирный участок (не виден на фиг.16, из-за его положения параллельно первому шарнирному участку 200а и непосредственно позади него). Отклоняющийся элемент 196 включает в себя кончик 202, который может, например, быть сформован на концевом участке 204 первого шарнирного участка 200а и второго шарнирного участка. Кончик 202 также может содержать массив ультразвукового формирования изображения, соответствующие электрические соединения и любой другой соответствующий компонент. Любая соответствующая схема электрического соединения и любая соответствующая схема активации отклонения, такая, как описанные здесь, могут использоваться с держателем 194 по фиг.16.
На фиг.17 показан катетер 206, который включает в себя внутренний трубчатый корпус 208 и внешний трубчатый корпус 210. К внутреннему трубчатому корпусу 208 прикреплен держатель 212, который поддерживает отклоняющийся элемент 214. Держатель 212 включает в себя первый и второй шарнирные участки 216а, 216b, которые обеспечивают возможность отклонения отклоняющегося элемента 214 относительно внутреннего и внешнего трубчатых корпусов 208, 210. Внешний трубчатый корпус 210 показан с вырезом на фиг.17 для упрощения описания. Держатель 212 дополнительно включает в себя первую область 218а контакта с внутренним трубчатым корпусом. Первая область 218а контакта с внутренним трубчатым корпусом может быть расположена между слоями внутреннего трубчатого корпуса 208 для закрепления держателя 212 на внутреннем трубчатом корпусе 208. Для иллюстрации такого крепления на фиг.17, участок внутреннего трубчатого корпуса 208, расположенный поверх первой области 218а контакта с внутренним трубчатым корпусом показан с вырезом. Вторая область контакта с внутренним трубчатым корпусом закреплена на втором шарнирном участке 216b и расположена между слоями внутреннего трубчатого корпуса 208 и, поэтому, не видна на фиг.17. Области контакта с внутренним трубчатым корпусом могут быть закреплены на внутреннем трубчатом корпусе 208, используя любой соответствующий способ крепления (например, приклеивание, пришивание). Держатель 212 может дополнительно включать в себя концевой участок 220. Отклоняющийся элемент может включать в себя кончик 222, который может быть сформован поверх концевого участка 220 для закрепления отклоняющегося элемента 214 на держателе 212 (аналогично описанию со ссылкой на фиг.16). Кончик 222 может также содержать массив формирования ультразвукового изображения, соответствующие электрические соединения и любой другой соответствующий компонент. Любая соответствующая схема электрического соединения и любая соответствующая схема активации отклонения, такая, как описана здесь, могут использоваться с держателем 212 на фиг.17. В альтернативной конфигурации держатель 212 может включать в себя одиночный шарнирный участок.
На фиг.18А и 18В показан катетер 224, который включает в себя внутренний трубчатый корпус 226 и внешний трубчатый корпус 228. На внутреннем трубчатом корпусе 226 закреплен держатель 230. Держатель 230 выполнен из полоски проволоки, изогнутой с приданием ей определенной формы для выполнения функций, описанных ниже. Держатель 230 может быть выполнен в виде непрерывной петли провода (например, во время формования, при этом концы такой проволочной нити используют для обеспечения крепления каждого из них к держателю 230). Держатель 230 включает в себя участок 232 контакта с трубчатым корпусом, который во время работы закреплен на внутреннем трубчатом корпусе 226 любым соответствующим способом (например, зажат и/или привязан). Держатель 230 дополнительно включает в себя два шарнирных участка:
первый шарнирный участок 234а и второй шарнирный участок (не виден на фиг.18А и 18В, из-за его расположения параллельно и непосредственно позади первого шарнирного участка 234а). Держатель 230 дополнительно включает в себя опорный участок 236 для массива, который во время работы удерживает массив 238 формирования ультразвукового изображения. Шарнирные участки позволяют отклонять массив 238 формирователя ультразвукового изображения относительно внутреннего и внешнего трубчатых корпусов 226, 228. Катетер 224 может дополнительно включать в себя тягу и/или элемент 240 электрического соединения. Катетер 224 также может дополнительно включать в себя вторую тягу и/или элемент электрического соединения (не показан). Как показано на фиг.18А и 18В, расширение (движение влево, на фиг.18А и 18В) внутреннего трубчатого корпуса 226 относительно внешнего трубчатого корпуса 228, может приводить к отклонению массива 238 формирования ультразвукового изображения относительно внешнего трубчатого корпуса 228. Катетер 224 также может включать в себя кончик (не показан), который может быть сформован поверх массива 238 формирования ультразвукового изображения, опорный участок 236 для массива и любые другие соответствующие компоненты. Любую соответствующую схему электрического соединения и любую соответствующую схему активации отклонения, такую, как описана здесь, можно использовать с держателем 230 на фиг.18А и 18В.
Возвращаясь кратко к фиг.5С и 5D, тяга 78 и гибкая плата 76 показаны взаимно соединенными между внешним трубчатым корпусом 79 и опорный участком 88. В альтернативной компоновке на фиг.5С и 5D функции тяги 78 и гибкой печатной платы 76 могут быть скомбинированы. В такой компоновке гибкая плата 76 также может действовать, как тяга. Гибкая плата 76, которая также используется, как тяга, может типично представлять собой гибкую плату, или она может быть специально выполнена с возможностью (например, усилена) ее использования в качестве тяги. В соответствующих случаях гибкая плата или другой элемент электрического соединения между отклоняющимся элементом и корпусом катетера могут также использоваться, как тяга (например, такая компоновка может использоваться в катетере 224 на фиг.18А и 18 В).
На фиг.19А-19С показан катетер 242, который включает в себя внутренний трубчатый корпус 244 и внешний трубчатый корпус 246. Удлинение 248 внутреннего трубчатого корпуса продолжается от дистального конца внутреннего трубчатого корпуса 244. Удлинение 248 внутреннего трубчатого корпуса шарнирно соединено с опорой 250 для массива через внутренний корпус, с шарниром 252 опоры для массива. Удлинение 248 внутреннего трубчатого корпуса, в общем, выполнено достаточно жестким, с возможностью шарнирного поворота опоры 250 для массива, как описано ниже. Опора 250 для массива может поддерживать массив для формирования ультразвукового изображения (не показано на фиг.19А-19С). Опора 250 для массива во время работы может поворачиваться относительно удлинения 248 внутреннего трубчатого корпуса вокруг внутреннего корпуса к шарниру 252 опоры для массива. Катетер 242 также может включать в себя тягу 254. Тяга может быть достаточно жесткой так, чтобы она, по существу, не выгибалась при шарнирном повороте опоры 250 для массива. Тяга 254 может включать в себя два отдельных элемента (только один из элементов виден на фиг.19А и 19В, из-за того, что один из элементов расположен параллельно другому элементу и непосредственно позади него). На первом конце тяга 254 может быть шарнирно соединена с внешним трубчатым корпусом 246 через внешний корпус шарниром 256 тяги. На другом конце тяга 254 может быть шарнирно соединена с опорой 250 для массива через шарнир 258 тяги. Как показано на фиг.19С (вид в поперечном сечении на фиг.19А вдоль линий 19С сечения), два элемента тяги 254 могут быть закреплены каждым концом тяги на шарнире 258. Опора 250 для массива может быть изогнута, и шарнир 258 тяги может быть пропущен через соответствующие отверстия в опоре 250 для массива. Другие шарниры 252, 256 могут быть выполнены аналогично. Удлинение 248 внутреннего трубчатого корпуса может быть выполнено аналогично тяге 254 в том, что оно также может быть составлено из двух элементов, которые отклоняют опору 250 для массива и взаимно соединяют два конца внутреннего корпуса с шарниром 252 опоры для массива.
Для поворота опоры 250 для массива относительно внутреннего и внешнего трубчатых корпусов 244, 246, внутренний трубчатый корпус 244 перемещается вдоль общей центральной оси относительно внешнего трубчатого корпуса 246. Как показано на фиг.19А и 19В, такое относительное движение, в комбинации с возможностью опоры тяг 254 на фиксированном расстоянии между шарниром 258 и опорой 250 для массива и шарниром 256 на внешнем трубчатом корпусе 246, приводит к тому, что опора 250 для массива поворачивается вокруг внутреннего корпуса к шарниру 252 опоры для массива, до тех пор, пока, как показано на фиг.19В, опора для массива не установится, по существу, перпендикулярно общей центральной оси внутреннего и внешнего трубчатых корпусов 244, 246. Движение внутреннего трубчатого корпуса 244 в противоположном направлении приводит к повороту опоры 250 для массива обратно в положение, показанное на фиг.19А. Следует понимать, что внутренний трубчатый корпус 244 может продолжаться за пределы положения, показанного на фиг.19В таким образом, что опора 250 для массива поворачивается на угол больше чем 90°. В одном варианте осуществления изобретения опора 250 для массива может шарнирно поворачиваться на угол, приближающийся к 180° таким образом, что открытый участок опоры 250 для массива, в общем, будет направлен вверх (например, в направлении, противоположном показанному на фиг.19А).
Катетер 242 также может включать в себя кончик (не показан), который может быть сформован поверх опоры 250 для массива, массив формирования ультразвукового изображения, и любые другие соответствующие компоненты. Любое соответствующее электрическое взаимное соединение, такое как описано здесь, может использоваться с катетером 242 на фиг.19А-19С.
В вариации варианта осуществления изобретения, изображенного на фиг.19А, удлинение 248 внутреннего трубчатого корпуса может быть заменено удлинением внешнего трубчатого корпуса аналогичной конфигурации, но с использованием части внешнего трубчатого корпуса 246 вместо внутреннего трубчатого корпуса 244. В таком варианте удлинение внешнего трубчатого корпуса может быть жестко закреплено на внешнем трубчатом корпусе 246 и постоянно установлено аналогично тяге 254. В таком варианте удлинение внешнего трубчатого корпуса может быть шарнирно соединено с опорой 250 для массива любым соответствующим способом. Такое шарнирное соединение может быть расположено в направлении проксимального конца опоры 250 для массива (например, конца, ближайшего к внутреннему трубчатому корпусу 244). Соединение может быть расположено между проксимальным концом опоры 250 для массива и внутренним трубчатым корпусом 244 таким образом, что, когда внутренний трубчатый корпус 244 продвигают относительно внешнего трубчатого корпуса 246, опора 250 для массива поворачивается вокруг шарнирного стыка между удлинением внешнего трубчатого корпуса и опорой 250 для массива.
На фиг.20А и 20В показан катетер 260, который включает в себя внутренний трубчатый корпус 262 и внешний трубчатый корпус 264. Внешний трубчатый корпус 264 включает в себя опорный участок 266 и шарнирный участок 268, расположенный между опорным участком 266 и трубчатым участком 270 внешнего трубчатого корпуса 264. Шарнирный участок 268 может, в общем, устанавливать опорный участок 266 таким образом, что опорный участок 266 будет выровнен с трубчатым участком 270, как показано на фиг.20А. Шарнирный участок 268 может быть упругим, и он может прикладывать возвратную силу при его отклонении из выровненного положения. Например, шарнирный участок 268 может подталкивать опорный участок 266 обратно в положение, показанное на фиг.20А, когда он расположен в положении, показанном на фиг.20 В. Шарнирный участок 268 может представлять собой участок 264 трубчатого корпуса с соответствующими внешними размерами, и/или он может включать в себя дополнительный материал, такой как опорный элемент (например, для повышения жесткости). Массив 270 формирования ультразвукового изображения может быть взаимно соединен с опорным участком 266. Соединение 274 может быть расположено между внутренним трубчатым корпусом 262 и опорным участком 266. Соединение 274 может быть адекватно жестким, с тем, чтобы противодействовать продольному прогибу. Соединение 274 может быть закреплено на внутреннем трубчатом корпусе 262 через внутренний трубчатый корпус, для соединения с шарниром 276. Соединение 274 может быть закреплено на опорном участке 266 через опорным участок для соединения с шарниром 278.
Для шарнирного поворота опорного участка 266 и закрепленного на нем массива 272 формирования ультразвукового изображения относительно внутреннего и внешнего трубчатых корпусов 262, 264, внутренний трубчатый корпус 262 перемещают вдоль общей центральной оси относительно внешнего трубчатого корпуса 264. Как показано на фиг.20А и 20В, такое относительное движение, в комбинации с возможностью опоры, соединения 274 на фиксированном расстоянии между шарнирами 276, 278, обеспечивает поворот опорного участка 266, до тех пор, пока, как показано на фиг.20В, держатель массива, по существу, не установится перпендикулярно общей центральной оси внутреннего и внешнего трубчатых корпусов 262, 264. Движение внутреннего трубчатого корпуса 262 в противоположном направлении приводит к тому, что опорный участок 266 поворачивается обратно в положение, показанное на фиг.20А.
Катетер 260 также может включать в себя кончик (не показан), который может быть сформован поверх опорного участка 266 и массива 272 формирования ультразвукового изображения, и любых других соответствующих компонентов. Любое соответствующее электрическое взаимное соединение, такое как описано здесь, может использовать с катетером 260 по фиг.20А и 20В.
В первой вариации варианта осуществления изобретения, показанного на фиг.20А, соединение 274 может быть заменено изгибающимся элементом, жестко закрепленным на опорном участке 266, на одном конце, и внутренним трубчатым корпусом 262 на другом конце. Такой изгибающийся элемент может изгибаться, когда внутренний трубчатый корпус 244 продвигают относительно внешнего трубчатого корпуса 246, и обеспечивают возможность поворота опорного участка, как показано на фиг.20В. Во второй вариации варианта осуществления изобретения, показанного на фиг.20А, опорный участок 266 и шарнирный участок 268 могут быть заменены отдельным элементом, который может быть выполнен аналогично, например, держателям 160, 168, 174 и/или 180, с модификацией, состоящей в том, что соответствующий участок контакта с трубчатым корпусом может иметь размер, и может быть выполнен с возможностью закрепления на внешнем трубчатом корпусе 264. Первый и второй варианты могут быть встроены по отдельности, или они оба могут быть встроены в вариант осуществления.
На фиг.21 показан держатель 280, который может использоваться в катетере, где катетер включает в себя внутренний трубчатый корпус, внешний трубчатый корпус и массив формирования ультразвукового изображения. Держатель 280 включает в себя проксимальный участок 282 контакта с трубчатым корпусом, который выполнен с возможностью его закрепления на внутреннем трубчатом корпусе, используя любой соответствующий способ крепления, такой как, например, зажим и/или склеивание. Держатель 280 дополнительно включает в себя дистальный участок 284 контакта с трубчатым корпусом, который выполнен с возможностью его закрепления на внешнем трубчатом корпусе, используя любой соответствующий способ крепления. Держатель 280 дополнительно включает в себя опорный участок 286 для поддержки массива формирования ультразвукового изображения. Держатель 280 дополнительно включает в себя два соединения: первое соединение 288 и второе соединение. Второе соединение включает в себя две части, соединение 290а и соединение 290b. Держатель 280 может быть выполнен таким образом, что когда проксимальный участок 282 контакта с трубчатым корпусом перемещают относительно дистального участка 284 контакта с трубчатым корпусом, опорный участок 286 для массива может поворачиваться относительно общей оси проксимального участка 282 контакта с трубчатым корпусом и дистального участка 284 контакта с трубчатым корпусом. Такое действие может быть достигнуто путем выбора соответствующей относительной ширины и/или формы соединений 288, 290а, 290b. В альтернативной компоновке держателя 280 проксимальный участок 282 контакта с трубчатым корпусом может быть закреплен на внешнем трубчатом корпусе, а дистальный участок 284 контакта с трубчатым корпусом может быть соединен с внутренним трубчатым корпусом. В таком варианте осуществления изобретения проксимальный участок 282 контакта с трубчатым корпусом и дистальный участок 284 контакта с трубчатым корпусом могут быть выполнены с требуемыми размерами, чтобы их можно было закреплять на внешнем и внутреннем трубчатых корпусах, соответственно.
На фиг.22А и 22В показан катетер 294, который включает в себя внутренний трубчатый корпус 296 и внешний трубчатый корпус 298. На внутреннем трубчатом корпусе 296 закреплен держатель 300. Держатель 300 может быть выполнен аналогично держателю 74, показанному на фиг.5B-5D с добавлением выреза 302. Катетер 294 может дополнительно включать в себя тягу 304, которая взаимно соединяет внешний трубчатый корпус 298 с опорным участком 306 держателя 300. Функционально, тяга 304 может выполнять функцию аналогичную тяге 78 по фиг.5B-5D. Тяга 304 может, например, быть сформирована из плоской полоски (например, сплющенной трубки), включающей в себя высокопрочный с приданной жесткостью фторполимер (HSTF) и расширенный фторированный этиленпропилен (EFEP). Тяга 304 может быть выполнена таким образом, что она включает в себя плоский участок 308 и уплотненный участок 310. Уплотненный участок 310 тяги 304 может быть сформирован путем скручивания тяги 304 в области, которую требуется уплотнить с последующим нагревом тяги 304. Уплотненный участок 310 может быть, в общем, круглым в поперечном сечении. В качестве альтернативы, уплотненный участок 310 может иметь, в общем, прямоугольное поперечное сечение, или поперечное сечение, имеющее любую другую соответствующую форму. При этом плоский участок 308 может быть расположен между соответствующими слоями внешнего трубчатого корпуса 298, без неприемлемого влияния на диаметр и/или форму внешнего трубчатого корпуса 298, в то время как уплотненный участок 310 может быть, в общем, круглым, что может, например, помогать вставке и установлению положения внутри выреза 302 и помогать исключить взаимные помехи с другими компонентами (например, элементом электрического соединения и/или держателем 300).
Вырез 302 может быть выполнен с возможностью приема в нем уплотненного участка 310 тяги 304 таким образом, что уплотненный участок 310 будет зацеплен в вырезе 302. В соответствии с этим, вырез 302 может быть выполнен таким образом, что его отверстие, в общем, находится еще дальше от внешнего трубчатого корпуса 298, чем самый глубокий участок выреза 302, который обычно занимает тяга 304. Поскольку на тягу 304 обычно действует сила растяжения во время отклонения участка 306 гнезда, тяга 304 может проявлять тенденцию оставаться внутри выреза 302. Кончик 312 может быть сформирован поверх опорного участка 306, и таким образом, может помогать удержанию уплотненного участка 310 внутри выреза 302. Как отмечено выше, держатель 300 может быть выполнен аналогично держателю 74 по фиг.5B-5D и, как таковой, может быть активирован аналогично (например, путем движения внутреннего трубчатого корпуса 296 относительно внешнего трубчатого корпуса 298 и соответствующего изгиба держателя 300, как показано на фиг.22 В). Катетер 294 может также включать в себя любые другие соответствующие компоненты. Любая соответствующая схема электрического соединения, такая, как описана здесь, может использоваться с катетером 294 по фиг.22А и 22В.
На фиг.23А и 23В показан катетер 316, который включает в себя внутренний трубчатый корпус 318 и внешний трубчатый корпус 320. На внутреннем трубчатом корпусе 318 закреплен держатель 322. Держатель 322 может быть выполнен аналогично держателю 74 на фиг.5B-5D. Катетер 316 может дополнительно включать в себя носок 324 тяги, который выполняет функцию обеспечения отклонения опорного участка 326 держателя 322 (как показано на фиг.23 В) относительно внутреннего трубчатого корпуса 318, когда внутренний трубчатый корпус 318 перемещается относительно внешнего трубчатого корпуса 320. В этом отношении, носок 324 тяги выполняет функцию, аналогичную тяге 78 на фиг.5B-5D. Носок 324 тяги обычно может быть выполнен трубчатым с закрытым концом 328. После установки в катетер 316, носок 324 тяги может включать в себя трубчатый участок 330 и сжатый участок 332. Трубчатый участок 330 может огибать опорный участок 326 и массив 334 формирования ультразвукового изображения. В качестве альтернативы, трубчатый участок 330 может огибать опорный участок 326, не закрывая массив 334 формирования ультразвукового изображения. Сжатый участок 332 обычно может иметь форму сжатой трубки и может быть закреплен на внешнем трубчатом корпусе 320 любым соответствующим образом. Между трубчатым участком 330 и сжатым участком 332, носок 324 тяги может включать в себя отверстие 336. Отверстие 334 может быть сформировано, например, путем выреза прорези в трубчатом носке 324 тяги перед установкой в катетер 316. Такая установка может включать в себя пропуск опорного участка 326 через отверстия 336, с размещением опорного участка 326 внутри закрытого конца 328 носка 324 тяги. Оставшийся носок 324 тяги (участок носка 326 тяги, который не расположен вокруг опорного участка 326) может быть сжат, формируя сжатый участок 332, и закреплен на внешнем трубчатом корпусе 320 любым соответствующим образом. Тяга 324, например, может быть сформирована из такого материала, который включает в себя слой HSTF, помещенный между двумя слоями EFEP. Катетер 316 также может включать в себя любые другие соответствующие компоненты. Любая соответствующая схема электрического соединения, такая, как описана здесь, может использоваться с катетером 316 по фиг.23А и 23B.
На фиг.24А-24С показан катетер 340, который включает в себя внешний трубчатый корпус 342 и сжимаемый внутренний канал 344. На фиг.24А-24СВ сжимаемый внутренний канал 344 и внешний трубчатый корпус 342 показаны в разрезе. Все другие иллюстрируемые компоненты катетера 340 не представлены в разрезе.
Будучи вставленным в тело пациента, катетер 340 может быть сконфигурирован, как показано на фиг.24А, с размещением массива 348 формирования ультразвукового изображения внутри внешнего трубчатого корпуса 342. Массив 348 формирования ультразвукового изображения может быть расположен на кончике 350. Массив 348 формирования ультразвукового изображения может быть электрически и механически взаимно соединен с внешним трубчатым корпусом 342 через петлю 352. Сжимаемый внутренний канал 344 может сжиматься в состоянии, в котором кончик 350 расположен внутри внешнего трубчатого корпуса 342, как показано на фиг.24А. Сжимаемый внутренний канал 344 может быть взаимно соединен с кончиком 350 с помощью соединителя 354. Находясь в положении, показанном на фиг.24А, массив 348 формирования ультразвукового изображения может работать, и, таким образом, могут быть сгенерированы изображения для помощи в установке положения катетера 340 перед вставкой интервенционного устройства 356 и/или во время его вставки.
На фиг.24В показан катетер 340, в ходе того, как интервенционное устройство 356 перемещает кончик 350. При этом, по мере того, как интервенционное устройство 356 продвигается через сжимаемый внутренний канал 344, интервенционное устройство 356 может выдвигать кончик 350 наружу, за пределы трубчатого корпуса 342.
На фиг.24С показан катетер 340 после того, как интервенционное устройство 356 была выдвинуто через отверстие 358 в конце сжимаемого внутреннего канала 344. Кончик 350 может оставаться взаимно соединенным со сжимаемым внутренним каналом 344 с помощью соединителя 354 между этими двумя компонентами. Как только интервенционное устройство 356 будет выдвинуто через отверстие 358, массив 348 формирования ультразвукового изображения может быть, в общем, направленным вперед (например, может быть направлен в дистальном направлении относительно катетера 340). Установке такого положения может способствовать соответствующим образом выполненная петля 352. Массив 348 формирования ультразвукового изображения может оставаться электрически соединенным через соответствующий кабель в петле 352. Катетер 340 также может включать в себя любые другие соответствующие компоненты.
На фиг.25А и 25В показан катетер 362, который включает в себя внешний трубчатый корпус 364 и внутренний элемент 366. На фиг.25А и 25В внешний трубчатый корпус 364 показан в разрезе. Все другие иллюстрируемые компоненты катетера 362 не показаны в разрезе. Внутренний элемент 366 может включать в себя кончик 368 и промежуточный участок 370, расположенный между кончиком 368 и трубчатым участком 372 внутреннего элемента 366. Промежуточный участок 370 может быть выполнен таким образом, что он устанавливает кончик 368 приблизительно под прямым углом относительно трубчатого участка 372 (как показано на фиг.25В) при фактическом отсутствии приложенных внешних сил. При этом, когда кончик 368 расположен внутри внешнего трубчатого корпуса 364, внешний трубчатый корпус 364 может содержать кончик 368 таким образом, что кончик 368 остается выровненным с трубчатым участком 372, как показано на фиг.25А. В некоторых вариантах осуществления изобретения конец внешнего трубчатого корпуса 364 может быть конструктивно усилен, с тем, чтобы способствовать удержанию кончика 368 выровненным на трубчатом участке 372, в то время как кончик 368 расположен в нем. Кончик 368 может включать в себя массив 374 формирования ультразвукового изображения. Внутри кончика 368 также может содержаться элемент электрического соединения (не показан), электрически соединенный с массивом 374 формирования ультразвукового изображения. Элемент электрического соединения может продолжаться через промежуточный участок 370 и затем вдоль внутреннего элемента 366. Внутренний элемент 366 также может включать в себя канал 376, сформированный внутри него. Хотя он показан, как одиночный элемент, кончик 368, промежуточный участок 370 и трубчатый участок 372 могут представлять собой отдельные участки, которые взаимно соединены во время процесса сборки. При этом, промежуточный участок 370 может быть выполнен из материала с памятью формы (например, Нитинола) с сохраненной в памяти конфигурацией, включающей в себя изгиб на 90°, в положении кончика 368, как показано на фиг.25В.
При использовании катетер 362 может быть вставлен в тело пациента так, что кончик 368 расположен внутри внешнего трубчатого корпуса 364. После того, как катетер 362 будет установлен в требуемом положении, внутренний элемент 366 может быть продвинут вперед относительно внешнего трубчатого корпуса 364, и/или внешний трубчатый корпус 364 может быть отведен назад так, что кончик 368 больше не будет расположен внутри внешнего трубчатого корпуса 364. В соответствии с этим, кончик 368 может перемещаться в развернутое положение (показано на фиг.25В), и массив 374 формирования ультразвукового изображения может использоваться для генерирования изображений объема, дистального для катетера 362. Интервенционное устройство (не показано) может быть выдвинуто вперед через канал 376.
На фиг.25С показан катетер 362', аналогичный катетеру 362 по фиг.25А и 25В с установленным в другом положении массивом 374' формирования ультразвукового изображения. Массив 374' формирования ультразвукового изображения расположен на кончике 368' таким образом, что после отклонения кончика 368' массив 374' формирования ультразвукового изображения может быть отклонен в, по меньшей мере, частично обращенное назад положение. Обращенный назад массив 374' формирования ультразвукового изображения может быть установлен вместо массива 374 формирования ультразвукового изображения по фиг.25А и 25В, или он может быть установлен в дополнение к массиву 374 формирования ультразвукового изображения по фиг.25А и 25В.
В соответствующих случаях, другие варианты осуществления изобретения, описанные здесь, могут включать в себя массивы формирования ультразвукового изображения, которые могут смещаться в положения, в которых они обращены назад. Они могут быть установлены вместо или в дополнение к раскрытым массивам формирования ультразвукового изображения. Например, вариант осуществления изобретения, показанный на фиг.2А, может включать в себя массив формирования ультразвукового изображения, который может быть смещен в положение, в котором он, по меньшей мере, частично обращен назад.
На фиг.26А и 26В показан катетер 380, который включает в себя трубчатый корпус 382 и кончик 384. На фиг.26А и 26В, трубчатый корпус 382 и кончик показаны в разрезе. Все другие иллюстрируемые компоненты катетера 380 не показаны в разрезе. Кончик 384 может включать в себя массив 386 формирования ультразвукового изображения. Кончик 384, например, может быть изготовлен путем формования кончика 384 поверх массива 386 формирования ультразвукового изображения. Кончик 384 может быть временно взаимно соединен с трубчатым корпусом 382 с помощью временной связи 388, которая удерживает кончик 384 закрепленным, в то время как катетер 380 вставляют в тело пациента. Временная связь 388 может, например, быть достигнута с помощью клея или разделяемого механического соединения. Любой другой соответствующий способ достижения разделяемой связи может использоваться для временной связи. Для того чтобы способствовать вставке, кончик 384 может иметь закругленный дистальный конец. Трубчатый корпус 382 включает в себя канал 390 для введения интервенционного устройства или другого соответствующего устройства (не показано). Катетер 380 также включает в себя кабель 392, который электрически соединяет массив 386 формирования ультразвукового изображения в кончике 384 с элементом электрического соединения (не показан) внутри стенки трубчатого корпуса 382. В то время как кончик временно закреплен на трубчатом корпусе 382, кабель 392 может быть расположен внутри участка канала 390, как показано на фиг.26А. Трубчатый корпус 382 может включать в себя канал 394 трубчатого корпуса, продолжающийся вдоль длины трубчатого корпуса 382. Соответствующий канал 396 кончика может быть расположен внутри кончика 384. Вместе, канал 394 трубчатого корпуса и канал 396 кончика могут быть выполнены так, что в них размещается элемент активации, такой как плоский провод 398. Плоский провод 398 может быть выполнен таким образом, что он устанавливает кончик 384 приблизительно под прямым углом относительно трубчатого корпуса 382 (как показано на фиг.26В) при, по существу, отсутствии внешним образом приложенных сил. При этом плоский провод 398 может быть выполнен из материала с памятью формы (например, Нитинола) с сохраненной конфигурацией, включающей в себя изгиб на 90°, как показано на фиг.25В. Кроме того, плоский провод 398 может быть выполнен таким образом, что он, во время работы, может быть продвинут вперед через канал 394 трубчатого корпуса и канал 396 кончика.
При использовании катетер 380 может быть вставлен в тело пациента с кончиком 384, временно соединенным с трубчатым корпусом 382. Находясь в положении, иллюстрируемом на фиг.26А, массив 386 формирования ультразвукового изображения может работать, и, таким образом, изображения могут быть сгенерированы, что помогает устанавливать положение катетера 380 во время вставки катетера 380. После того, как катетер 380 будет установлен в требуемое положение, плоский провод 398 может быть продвинут вперед относительно трубчатого корпуса 382 и внутрь кончика через канал 394 трубчатого корпуса и канал 396 кончика. После того, как плоский провод 398 войдет в контакт с концом канала 396 кончика (и/или после того, как трение между плоским проводом 398 и кончиком 384 достигнет заданного порогового значения), дополнительная сила вставки, прикладываемая к плоскому проводу 398, может привести к разрыву временной связи 388 и высвобождению кончика 384 из трубчатого корпуса 382. После высвобождения, дальнейшее продвижение плоского провода 398 относительно трубчатого корпуса 382 может привести к проталкиванию кончика 384 из трубчатого корпуса 382. После высвобождения из трубчатого корпуса 382, участок плоского провода 398 между кончиком 384 и трубчатым корпусом 382 может возвратиться к сохраненной форме, что может привести к тому, что кончик 384 будет смещен, как показано на фиг.26В. В таком положении массив 386 формирования ультразвукового изображения может использоваться для генерирования изображения объема, дистального для катетера 380. Интервенционное устройство (не показано) может быть продвинуто через канал 376. Кроме того, силу, требуемую для разрыва временной связи 388, можно выбрать так, чтобы плоский провод 398 заканчивался с прессовой посадкой внутри канала 396 кончика в той степени, которая позволяет в последующем втянуть плоский провод 398 для отвода кончика 384 проксимально концу трубчатого корпуса 382 для дальнейшей установки и/или удаления катетера 380 из тела пациента.
На фиг.27А-27С показан катетер 402, который включает в себя трубчатый корпус 404. На фиг.27А-27С трубчатый корпус 404 показан в виде в разрезе. Все другие представленные компоненты катетера 402 не показаны в разрезе. Внутри участка трубчатого корпуса 404 расположены первый кабель 406 управления и второй кабель 408 управления. Первый и второй кабели 406, 408 управления функционально взаимно соединены с противоположными концами массива 410 формирователя ультразвукового изображения. Кабели 406, 408 управления каждый имеет соответствующий уровень жесткости таким образом, что можно манипулировать путем перемещения первого кабеля 406 управления относительно второго кабеля 408 управления положением массива 410 формирования ультразвукового изображения относительно трубчатого корпуса 404. Как показано на фиг.27А, кабели 406, 408 управления могут быть расположены так, что массив 410 формирования ультразвукового изображения будет направлен в первом направлении (вверх, как показано на фиг.27А). Путем перемещения первого кабеля 406 управления в дистальном направлении относительно второго кабеля 408 управления, массив 410 формирования ультразвукового изображения может быть отрегулирован так, чтобы он был направлен в дистальном направлении (как показано на фиг.27В). В результате перемещения первого кабеля 406 управления далее в дистальном направлении относительно второго кабеля 408 управления, массив 410 формирования ультразвукового изображения можно регулировать так, что он будет направлен в направления, противоположном первому направлению (вниз, как показано на фиг.27С). Следует понимать, что любое положение между показанными положениями также может быть достигнуто. Также следует понимать, что описанные выше положения массива 410 формирования ультразвукового изображения могут быть достигнуты в результате относительного движения кабелей 406, 408 управления и при этом может быть достигнуто закрепление любого из кабелей 406,408 управления относительно трубчатого корпуса 404 и перемещение других из кабелей управления или перемещение обоих кабелей 406, 408 управления одновременно. По меньшей мере, один из кабелей 406, 408 управления может содержать электрические проводники для электрического соединения с массивом 410 формирования ультразвукового изображения.
Первый кабель 406 управления может быть закреплен на первой половине стержня 412. Второй кабель 408 управления может быть закреплен на второй половине стержня 414. Каждая половина стержней 412, 414 может представлять собой половину цилиндра, выполненную таким образом, что когда они находятся рядом друг с другом, они формируют цилиндр с диаметром приблизительно равным внутреннему диаметру трубчатого корпуса 404. Половина стержней 412, 414 может быть выполнена из гибкого материала и/или из материала с хорошей смазываемостью (например, PTFE), и стержни могут работать при продольном изгибе с трубчатым корпусом 404 (например, в то время как катетер 402 располагают внутри тела пациента). Половина стержней 412, 414 могут быть расположены вблизи дистального конца катетера 402, а вторая половина стержня 414 может быть зафиксирована относительно трубчатого корпуса 404, в то время как первая половина стержня 412 остается подвижной относительно трубчатого корпуса 404. Кроме того, активатор (не показан), такой как плоский провод и т.п., может быть закреплен на первой половине стержня 412 и может продолжаться вдоль длины трубчатого корпуса 404 для обеспечения пользователю возможности движения первой половины стержня 412 относительно второй половины стержня 414 и, таким образом, возможности манипулировать положением массива 410 формирования ультразвукового изображения.
Изменение положения массива 410 формирования ультразвукового изображения было описано как результат перемещения первой половины стержня 412, в то время как вторая половина стержня 414 остается неподвижной относительно трубчатого корпуса 404. В альтернативных вариантах осуществления изобретения положение массива 410 формирования ультразвукового изображения может быть изменено путем перемещения второй половины стержня 414, в то время как первая половина стержень 412 остается неподвижной, или путем перемещения обеих первой половины стержня 412 и второй половины стержня 414 одновременно, последовательно или в комбинации одновременного и последовательного движения.
На фиг.28А и 28В показан катетер 418, который включает в себя внешний трубчатый корпус 420 и внутренний трубчатый корпус 422. Внутренний трубчатый корпус 422 может включать в себя канал, сформированный в нем. Катетер 418 также включает в себя кончик 424, который включает в себя массив 426 формирования ультразвукового изображения. Кончик 424 взаимно соединен с внешним трубчатым корпусом 420 с помощью держателя 428 кончика. Держатель 428 кончика может включать в себя элемент электрического соединения (например, гибкую плату, кабель) для электрического соединения с массивом 426 формирования ультразвукового изображения. Хотя они показаны, как единая часть, внешний трубчатый корпус 420, держатель 428 кончика и кончик 424 каждый может представлять собой отдельные компоненты, которые соединены вместе в процессе сборки. Один конец кончика 424 может быть соединен с держателем 428 кончика, а другой конец может быть соединен с дистальным концом внутреннего трубчатого корпуса 422 с помощью шарнира 430. Шарнир 430 может обеспечивать возможность вращения кончика 424 вокруг шарнира 430 относительно внутреннего трубчатого корпуса 422. Держатель 428 кончика может быть выполнен с однородной или неоднородной заданной жесткостью, для того, чтобы способствовать установке, как показано на фиг.28А (например, осевое выравнивание кончика 424 с внутренним трубчатым корпусом 422). Держатель 428 кончика может включать в себя материал с памятью формы.
В одном варианте осуществления изобретения по фиг.28А и 28В и во всех других соответствующих вариантах осуществления изобретения, описанных здесь, шарнир 430 или другой соответствующий шарнир может представлять собой пленочный шарнир (также известный в уровне техники, как "гибкий" шарнир) или шарнир любого другого соответствующего типа, и его можно выполнить из любого соответствующего материала (например, шарнир может быть полимерным шарниром). Шарнир 430 или другой соответствующий шарнир может представлять собой идеальный шарнир и может включать в себя множество компонентов, таких как штифты и соответствующие отверстия и/или петли.
Во время вставки в тело пациента катетер 418 может быть расположен, как показано на фиг.28А, так, что кончик 424 находится в осевом выравнивании с внутренним трубчатым корпусом 422, и поле обзора массива 426 формирования ультразвукового изображения направлено перпендикулярно к продольной оси катетера 418 (вниз, как показано на фиг.28А). В этом отношении, катетер 418 может, по существу, находиться внутри диаметра, равного внешнему диаметру внешнего трубчатого корпуса 420. Если требуется, кончик 424 может быть шарнирно повернут относительно внутреннего трубчатого корпуса 422 для изменения направления поля обзора массива 426 формирования ультразвукового изображения. Например, при перемещении внутреннего трубчатого корпуса 422 в дистальном направлении относительно внешнего трубчатого корпуса 420, кончик 424 может шарнирно поворачиваться в положение, показанное на фиг.28В таким образом, что поле обзора массива 426 формирования ультразвукового изображения будет направлено вверх. Следует понимать, что положения между показанными на фиг.28А и 28В могут быть достигнуты во время этого поворота, включая в себя положение, в котором кончик 424 расположен вертикально (относительно положения, показанного на фиг.28А и 28В), и поле обзора массива 426 формирования ультразвукового изображения направлено в дистальном направлении. Следует также понимать, что как только кончик 424 будет расположен вертикально, дистальный конец канала внутреннего трубчатого корпуса 422 будет свободен и не будет закрыт кончиком 424, и интервенционное устройство может быть затем вставлено через канал.
В вариации варианта осуществления изобретения по фиг.28А и 28В, внутренний трубчатый корпус может представлять собой сжимаемый канал. В таком варианте осуществления изобретения введение интервенционного устройства может использоваться для разворачивания кончика 424 в положение, в котором он направлен дистально, и последующий отвод сжимаемого канала может использоваться для возврата кончика 424 в положение, показанное на фиг.28А.
В другой вариации варианта осуществления изобретения по фиг.28А и 28В держатель 428 кончика может включать в себя элемент 432 с повышающейся жесткостью. Элемент 432 с повышающейся жесткостью может быть выполнен таким образом, что он остается прямым во время разворачивания катетера 418. При этом, во время поворота кончика 424, держатель 428 кончика может, по существу, изгибаться только в областях между элементом 432 с повышающейся жесткостью и кончик 424, и между элементом 432 с повышающейся жесткостью и внешним трубчатым корпусом 420.
На фиг.29А и 29В показан катетер 436, который включает в себя внешний трубчатый корпус 438 и внутренний трубчатый корпус 440. Внутренний трубчатый корпус 440 может включать в себя канал, сформированный в нем. Катетер 436 также включает в себя массив 442 формирования ультразвукового изображения, взаимно соединенный с держателем 444 кончика. Держатель 444 кончика взаимно соединен с дистальным концом внутреннего трубчатого корпуса 440 с помощью шарнира 446. Шарнир 446 может обеспечить возможность вращения держателя 444 кончика вокруг шарнира 446 относительно внутреннего трубчатого корпуса 440. Элемент 448 электрического соединения может быть электрически соединен с массивом 442 формирования ультразвукового изображения. Элемент 448 электрического соединения соединен с дистальным концом массива 442 формирования ультразвукового изображения. Элемент 448 электрического соединения может быть соединен или по-другому закреплен на участке 450 держателя 444 кончика с противоположной стороны держателя кончика от массива 442 формирования ультразвукового изображения. Элемент 448 электрического соединения может включать в себя петлю 452 между соединением массива 442 формирования ультразвукового изображения и соединенным участком 450. Соединенный участок 450, ввиду его фиксированного положения относительно держателя 444 кончика, может использоваться для устранения натяжения, предотвращающего натяжение, связанное с шарнирным поворотом массива 442 формирования ультразвукового изображения, которое переводится на петлю 452 и массив 442 через элемент 448 электрического соединения. Участок 454 тяги элемента 448 электрического соединения может быть расположен между соединенным участком 450 и точкой, где элемент 448 электрического соединения входит во внешний трубчатый корпус 436. Участок 454 тяги может быть немодифицированным участком элемента 448 электрического соединения, или он может быть модифицирован (например, конструктивно усилен) для того, чтобы выдерживать дополнительные воздействующие силы, поскольку он используется, как тяга. Держатель 444 кончика и массив 442 формирования ультразвукового изображения могут быть окружены или по-другому расположены внутри кончика (не показан).
Во время вставки в тело пациента катетер 436 может быть расположен, как показано на фиг.29А, так, что массив 442 формирования ультразвукового изображения находится в осевом выравнивании с внутренним трубчатым корпусом 440, и поле обзора массива 442 формирования ультразвукового изображения направлено перпендикулярно продольной оси катетера 436 (вниз, как показано на фиг.29А). При этом катетер 436 может, по существу, содержаться внутри диаметра, равного внешнему диаметру внешнего трубчатого корпуса 438. В соответствии с необходимостью, массив 442 формирования ультразвукового изображения может поворачиваться относительно внутреннего трубчатого корпуса 440 путем перемещения внутреннего трубчатого корпуса 440 дистально относительно внешнего трубчатого корпуса 438. Такое относительное движение приведет к тому, что массив 442 формирования ультразвукового изображения будет шарнирно поворачиваться вокруг шарнира 446 из-за ограничения движения массива 442 формирования ультразвукового изображения участком 454 тяги. Массив 442 формирования ультразвукового изображения может быть возвращен в положение, представленное на фиг.29А, путем перемещения внутреннего трубчатого корпуса 440 проксимально относительно внешнего трубчатого корпуса 438.
На фиг.30А и 30В показан катетер 458, который включает в себя внешний трубчатый корпус 460, и внутренний трубчатый корпус 462. Внутренний трубчатый корпус 462 может включать в себя канал, сформированный в нем. Катетер 458 также включает в себя массив 466 формирования ультразвукового изображения, расположенный внутри кончика 424. Кончик 424 взаимно соединен с дистальным концом внутреннего трубчатого корпуса 462 с помощью шарнира 468. Шарнир 468 может обеспечить возможность поворота кончика 424 вокруг шарнира 468 относительно внутреннего трубчатого корпуса 462. Катетер 458 может дополнительно включать в себя тягу 470. Тяга 470 может быть закреплена в дистальной области кончика 424 в точке 472 крепления кончика. Тяга 470 может быть закреплена на дистальном конце внешнего трубчатого корпуса 460 в точке 474 крепления внешнего трубчатого корпуса. Любая схема соответствующего электрического соединения, такая как описана здесь, может использоваться с катетером 458 на фиг.30А и 30В.
Во время вставки в тело пациента катетер 458 может быть расположен, как показано на фиг.30А, так что кончик 424 находится в осевом выравнивании с внутренним трубчатым корпусом 462, и поле обзора массива 466 формирования ультразвукового изображения направлено под прямым углом к продольной оси катетера 458 (вниз, как показано на фиг.30А). Такой установке кончика 424 может способствовать пружина или другой соответствующий механизм или компонент, смещающий кончик 424 в направлении положения, представленного на фиг.30А. При этом катетер 458 может, по существу, содержаться внутри диаметра, равного внешнему диаметру внешнего трубчатого корпуса 460. Если требуется, кончик 424 может быть шарнирно повернут относительно внутреннего трубчатого корпуса 462, путем перемещения внешнего трубчатого корпуса 460 проксимально относительно внутреннего трубчатого корпуса 462. Такое относительное движение может привести к шарнирному повороту кончика 424 вокруг шарнира 468 из-за ограничения движения кончика 424 шарниром 468. Кончик 424 может быть возвращен в положение, показанное на фиг.30А, путем движения внешнего трубчатого корпуса 460 дистально относительно внутреннего трубчатого корпуса 462, что обеспечивает возможность механизма или компонента смещения возвращать кончик 424 в положение, показанное на фиг.30А. В альтернативном варианте осуществления изобретения тяга 470 может обладать достаточной жесткостью таким образом, что, по существу, не требуется смещение кончика 424 в положение, показанное на фиг.30А.
Следует понимать, что шарниры 446, 468 на фиг.29А и 30А, соответственно (вместе с, когда это целесообразно, любым другим шарниром, описанным здесь), могут быть выполнены в форме пленочных шарниров, таких как пленочный шарнир, который представляет собой часть держателя 174, показанного на фиг.14С. Также следует понимать, что шарниры 446, 468, показанные на фиг.29А и 30А, соответственно, могут быть выполнены в форме пленочных шарниров и держателей массива, которые составляют части внутренних трубчатых корпусов 440, 462, соответственно. Такие внутренние трубчатые корпуса, которые также используются как держатели для массивов, могут быть выполнены аналогично по конфигурации внешнему трубчатому корпусу 264 с опорным участком 266, который показан на фиг.20В.
На фиг.31А и 31В показан катетер 458 и его компоненты, показанные на фиг.30А и 30В, с добавлением упругой трубки 478. Упругая трубка 478 может действовать, как механизм смещения для смещения кончика 424 в направлении положения, показанного на фиг.31А. Упругая трубка 478 также может сделать катетер 458 менее травматичным для сосуда, в который его вставляют. Упругая трубка 478 может включать в себя, например, упругий материал, выполненный с возможностью его деформации, как показано на фиг.31В, когда кончик 424 отклоняется и возвращается в состояние, показанное на фиг.31А, как только сила отклонения будет устранена или уменьшена (например, когда внешний трубчатый корпус 460 будет возвращен в положение относительно внутреннего трубчатого корпуса 462, показанное на фиг.31А). Для сохранения способности ввода интервенционного устройства через канал внутреннего трубчатого корпуса 462 упругая трубка 478 может включать в себя отверстие 480. Находясь в положении, показанном на фиг.31В, отверстие 480 может совмещаться с каналом и, поэтому, оно не мешает размещению интервенционного устройства через канал. Упругая трубка 478 может быть взаимно соединена с внутренним трубчатым корпусом 462 и участком 464 кончика любым соответствующим способом, таким, как например, подгонка с усадкой, связывание, сварка или с помощью клея. Хотя упругий элемент 478 представлен здесь, как занимающий поле обзора массива 466 формирования ультразвукового изображения, в качестве альтернативы, упругий элемент 478 может быть расположен таким образом, что он не будет находиться в пределах поля обзора массива 466 формирования ультразвукового изображения. Это может быть выполнено путем изменения конфигурации упругого элемента 478 относительно представленного и/или путем изменения положения массива 466 формирования ультразвукового изображения относительно представленного. Упругий элемент 478 или аналогичный, соответствующим образом модифицированный упругий элемент, может использоваться в любом соответствующем варианте осуществления, раскрытом здесь.
На фиг.32А и 32В показан катетер 484, который включает в себя внешний трубчатый корпус 486 и внутренний трубчатый корпус 488. Внутренний трубчатый корпус 488 может включать в себя канал, сформированный в нем. Катетер 484 также включает в себя массив 490 формирования ультразвукового изображения, взаимно соединенный с элементом 492 электрического соединения. Элемент 492 электрического соединения, например, может быть в виде гибкой платы, взаимно соединенной с намотанным спиралью элементом электрического соединения внутри внешнего трубчатого корпуса 486, на одном конце, и соединенной с массивом 490 формирования ультразвукового изображения на другом конце. Катетер 484 также включает в себя тягу 494, закрепленную одном концом на дистальном конце элемента 492 электрического соединения и/или на массиве 490 формирования ультразвукового изображения на тяге, для крепления 496 массива. На другом конце тяга 494 может быть закреплена на внутреннем трубчатом корпусе 488 на креплении 498 тяги к внутреннему трубчатому корпусу. Как показано на фиг.32А, тяга 494 может быть расположена таким образом, что она изгибается вокруг инициатора 500 продольного изгиба, когда массив 490 формирования ультразвукового изображения выравнивается с внутренним трубчатом корпусом 488. Элемент 492 электрического соединения может использоваться, как для обеспечения электрического соединения с массивом 490 формирования ультразвукового изображения, так и действовать в качестве пружинного элемента для смещения массива 490 формирования ультразвукового изображения в направлении положении, показанного на фиг.32А (например, выровненного с внутренним трубчатым корпусом 488). Для достижения этого, элемент 492 электрического соединения может включать в себя элемент, придающий жесткость, и/или пружинный элемент, взаимно соединенный с элементом 492 электрического соединения в области между массивом 490 формирования ультразвукового изображения и внешним трубчатым корпусом 486. Кончик (не показан) может быть сформован поверх массива 490 формирования ультразвукового изображения.
Во время вставки в тело пациента катетер 484, с кончиком соответствующей конфигурации (не показан), может быть расположен, как на фиг.32А, с осевым выравниванием массива 490 формирования ультразвукового изображения с внутренним трубчатым корпусом 488, и поле обзора массива 490 формирования ультразвукового изображения при этом направлено, в общем, перпендикулярно от продольной оси катетера 484 (показан направленным вниз на фиг.32А). При этом катетер 484 может, по существу, содержаться внутри диаметра, равного внешнему диаметру внешнего трубчатого корпуса 486. Как описано, массив 490 формирования ультразвукового изображения может шарнирно поворачиваться относительно внутреннего трубчатого корпуса 488 при перемещении внутреннего трубчатого корпуса 440 проксимально относительно внешнего трубчатого корпуса 486. Такое относительное движение натягивает тягу 494, в результате чего, возникает сила, направленная вниз от тяги 494, воздействующая на элемент 500 продольного изгиба. Сила, направленная вниз, может привести к тому, что элемент 492 электрического соединения будет прогибаться управляемым образом, таким образом, что элемент 492 электрического соединения шарнирно поворачивается в направлении по часовой стрелке (относительно вида, показанного на фиг.32А). После инициации прогиба, продолжение относительного движения внутреннего трубчатого корпуса 488 может привести к тому, что массив 490 формирования ультразвукового изображения будет поворачиваться в положение, в котором он направлен вперед, показанное на фиг.32В. Массив 490 формирования ультразвукового изображения может быть возвращен в положение, показанное на фиг.32А при перемещении внутреннего трубчатого корпуса 488 дистально относительно внешнего трубчатого корпуса 438. В таком случае упомянутое выше смещение элемента 492 электрического соединения в массиве 490 формирования ультразвукового изображения, возвращается в положение, представленное на фиг.32А.
Следует понимать, что, когда целесообразно, элементы электрического соединения, описанные здесь, которые располагают между трубчатыми корпусами и массивами формирования ультразвукового изображения, которые движутся относительно этих трубчатых корпусов, могут быть выполнены с возможностью дополнительного использования их в качестве элементов смещения (так, как описано выше со ссылкой на фиг.32А и 32В).
На фиг.33А и 33В показан катетер 504, который включает в себя внешний трубчатый корпус 506 и внутренний трубчатый корпус 508. Внутренний трубчатый корпус 508 может включать в себя канал, сформированный в нем. На фиг.33А и 33В, внешний трубчатый корпус 506 показан в разрезе. Все другие представленные компоненты катетера 504 не показаны в разрезе. Внешний трубчатый корпус 506 включает в себя опорный участок 510 и шарнирный участок 512, расположенный между опорным участком 510 и трубчатым участком 514 внешнего трубчатого корпуса 506. Шарнирный участок 512, в общем, может ограничивать движение опорного участка 510 для отклонения относительно трубчатого участка 514 (например, отклонения между положением, показанным на фиг.33А, и положением, показанным на фиг.33 В).
Шарнирный участок 512 может, как показано на фиг.33А и 33В, представлять собой участок соответствующих размеров внешнего трубчатого корпуса 506, и/или он может включать в себя дополнительный материал, такой как элемент держателя (например, для повышения жесткости). В вариации варианта осуществления по фиг.33А и 33В, опорный участок 510 и шарнирный участок 512 могут быть заменены отдельным элементом, который может быть выполнен аналогично, например, держателям 160, 168, 174 и/или 180, с такой модификацией, что участок контакта с соответствующим трубчатым корпусом будет иметь такие размеры и будет выполнен таким образом, чтобы его можно было закреплять на внешнем трубчатом корпусе 506.
Массив 516 формирования ультразвукового изображения может быть взаимно соединен с опорным участком 510. Первый конец первой тяги 518 может быть взаимно соединен с дистальным концом внутреннего трубчатого корпуса 508, а второй конец первой тяги 518 может быть взаимно соединен с проксимальным концом опорного участка 510. Первый конец второй тяги 520 может быть взаимно соединен с внутренним трубчатым корпусом 508, а второй конец второй тяги 520 может быть взаимно соединен с дистальным концом опорного участка 510. На второй тяге может быть нарезана резьба через сквозное отверстие 522 во внешнем трубчатом корпусе 506.
Для шарнирного поворота опорного участка 510 и прикрепленного к нему массива 516 формирования ультразвукового изображения из положения, показанного на фиг.33а (например, выровненного с внутренним трубчатым корпусом 508) в положение, представленное на фиг.33В (например, перпендикулярно продольной оси катетера 504 и обращенного вперед), внутренний трубчатый корпус 508 перемещается дистально относительно внешнего трубчатого корпуса 506. Такое движение приводит к тому, что вторая тяга 520 будет втянута внутрь внешнего трубчатого корпуса 506 через сквозное отверстие 522. По мере того, как вторую тягу втягивают через сквозное отверстие 522, эффективная длина тяги между сквозным отверстием 522 и дистальным концом опорного участка 510 сокращается, вызывая шарнирный поворот опорного участка 510. Для возврата опорного участка 510 в положение, показанное на фиг.33А, из положения, представленного на фиг.33В, внутренний трубчатый корпус 508 перемещают проксимально относительно внешнего трубчатого корпуса 506. Такое движение приводит к вытягиванию внутреннего трубчатого корпуса 508 (из-за их соединения через первую тягу 518) опорного участка 510 обратно в направлении к положению, где опорный участок 510 выровнен с внутренним трубчатым корпусом 508. Следует понимать, что, когда натягивают одну из тяг 518, 520 в результате движения внутреннего трубчатого корпуса 508 относительно внешнего трубчатого корпуса 506, натяжение будет снято с другой одной из тяг 518, 520. В альтернативной конфигурации катетера 504, первая и вторая тяги 518, 520 могут быть скомбинированы в одну тягу, закрепленную вдоль внутреннего трубчатого корпуса 508, как показано, и пропущенную вдоль опорного участка 510. Такая тяга может быть закреплена на участке 510 держателя в одной точке.
Катетер 504 может также включать в себя кончик (не показан), который может быть сформован поверх опорного участка 510 массива 516 формирования ультразвукового изображения, и/или любых других соответствующих компонентов. Любое соответствующее электрическое взаимное соединение, такое как описано здесь, может использоваться с катетером 504 по фиг.33А и 33В.
На фиг.34А и 34В представлен катетер 526, который представляет собой вариацию катетера 504, показанного на фиг.33А и 33В. При этом аналогичные компоненты имеют одинаковые номера ссылочных позиций и не будут описаны со ссылкой на фиг.34А и 34В. Первый конец первой тяги 528 может быть взаимно соединен с боковой стенкой внутреннего трубчатого корпуса 508, и второй конец первой тяги 528 может быть взаимно соединен с дистальной точкой шарнирного участка 512. Первый конец второй тяги 530 может быть взаимно соединен с боковой стенкой внутреннего трубчатого корпуса 508 в точке вдоль длины внутреннего трубчатого корпуса 508, которая соответствует положению сквозного отверстия 522, и второй конец второй тяги 520 может быть взаимно соединен с дистальным концом опорного участка 510. Вторая тяга может быть пропущена через сквозное отверстие 522 во внешнем трубчатом корпусе 506. Внутренний трубчатый корпус 508 может быть расположен таким образом, что дистальный участок его продолжается дистально от дистального конца внешнего трубчатого корпуса 506. Внутренний трубчатый корпус 508 может поворачиваться относительно внешнего трубчатого корпуса 506.
Когда опорный участок 510 выровнен с трубчатым участком 514, как показано на фиг.34А, тяги 528, 530 могут быть расположены следующим образом. Первая тяга 528 может быть, по меньшей мере, частично обернута вокруг и закреплена на внешнем контуре внутреннего трубчатого корпуса 508. Вторая тяга 530 может быть, по меньшей мере, частично обернута в направлении, противоположном от первой тяги 528, и закреплена на внешнем контуре внутреннего трубчатого корпуса 508. Как показано на фиг.34А, когда смотреть из точки, дистальной к дистальному концу внутреннего трубчатого корпуса 508 и в направлении дистального конца внутреннего трубчатого корпуса 508 (ниже называется видом с торца), первая тяга 528 частично обернута вокруг внутреннего трубчатого корпуса 508 в направлении по часовой стрелке, и вторая тяга 530 частично обернута вокруг внутреннего трубчатого корпуса 508 в направлении против часовой стрелки. Тяги 528, 530 могут быть в форме элементов шнура, которые способны передавать силы растяжения вдоль их длины и которые оборачиваются с повторением формы вокруг внутреннего трубчатого корпуса 508. Компоновки тяги 528, 530 могут быть выполнены в виде пружины, намотанной вокруг внутреннего трубчатого корпуса 508.
Для шарнирного отклонения опорного участка 510 и закрепленного на нем массива 516 формирования ультразвукового изображения из положения, показанного на фиг.34а (например, выровненного с внутренним трубчатым корпусом 508) в положение, показанное на фиг.34В (например, перпендикулярно продольной оси катетера 526 и направленного вперед), внутренний трубчатый корпус 508 поворачивают против часовой стрелки (как можно видеть в виде с торца) относительно внешнего трубчатого корпуса 506. Такой поворот приводит к тому, что вторая тяга 530 втягивается внутрь внешнего трубчатого корпуса 506 через сквозное отверстие 522, благодаря тому, что она оборачивается вокруг внутреннего трубчатого корпуса 508. По мере того, как вторая тяга втягивается через сквозное отверстие 522, эффективная длина тяги между сквозным отверстием 522 и дистальным концом опорного участка 510 сокращается, что приводит к шарнирному повороту опорного участка 510. Одновременно первая тяга 528 разматывается с внутреннего трубчатого корпуса 508. Для возврата опорного участка 510 в положение, показанное на фиг.34А, из положения, представленного на фиг.34В, внутренний трубчатый корпус 508 поворачивают в направлении по часовой стрелке (как видно в виде с торца) относительно внешнего трубчатого корпуса 506. Такой поворот приводит к тому, что первая тяга 528 оборачивается вокруг внутреннего трубчатого корпуса 508, вытягивая, таким образом, опорный участок 510 обратно в направлении положения, показанного на фиг.34А. Одновременно вторая тяга 530 разворачивается с внутреннего трубчатого корпуса 508. В случае, когда катетер 526 выполнен таким образом, что опорный участок 510 смещается в направление положения, показанного на фиг.34А, первая тяга 528 может быть ненужной (например, смещение может быть адекватно возврату опорного участка 510 в положение, показанное на фиг.34А, в результате разворачивания второй тяги 530). Аналогично этому, в случае, когда катетер 526 выполнен так, что опорный участок 510 смещен в направлении положения, показанного на фиг.34В, вторая тяга 530 может быть ненужной (например, смещение может быть адекватным для перемещения опорного участка 510 в положение, показанное на фиг.34В, в результате разворачивания первой тяги 528). Аналогично, первая тяга 518 катетера 504 на фиг.33А и 33В может быть ненужной, когда опорный участок 510 смещается в направлении положения, показанного на фиг.33А, и вторая тяга 520 катетера 504 по фиг.33А и 33В, может быть ненужной, в случае, когда опорный участок 510 смещается в направлении положения, показанного на фиг.33В.
Катетер 526 также может включать в себя кончик (не показан), который может быть сформован поверх опорного участка 510 массива 516 формирования ультразвукового изображения и/или любых других соответствующих компонентов. Любое соответствующее электрическое взаимное соединение, такое как описано здесь, можно использовать с катетером 526 по фиг.34А и 34В.
На фиг.35А и 35В показан катетер 534, который включает в себя внешний трубчатый корпус 536 и внутренний трубчатый корпус 538. Внутренний трубчатый корпус 538 может включать в себя канал, сформированный в нем. Внешний трубчатый корпус 536 включает в себя опорный участок 540 и шарнирный участок 544. Шарнирный участок 544 может быть смещен таким образом, что он, в общем, устанавливает опорный участок 540 так, что опорный участок 540 располагается приблизительно под прямым углом относительно внутреннего трубчатого корпуса 538 (как показано на фиг.35В), по существу, в отсутствие внешних приложенных сил. Массив 542 формирования ультразвукового изображения может быть взаимно соединен с опорным участком 540. Шарнирный участок 544 может представлять собой участок с соответствующими размерами внешнего трубчатого корпуса 536, и/или он может включать в себя дополнительный материал (например, для повышения жесткости).
Катетер 534 включает в себя тягу 546, расположенную между дистальным участком шарнирного участка 544 и внутренним трубчатым корпусом 538. Тяга 546 может, по меньшей мере, частично быть обернута вокруг и закреплена на внешнем контуре внутреннего трубчатого корпуса 538. Тяга 546 может быть выполнена в виде шнура, который позволяет передавать силы растяжения вдоль его длины и который оборачивается с повторением формы вокруг внутреннего трубчатого корпуса 538.
Для шарнирного поворота опорного участка 540 и закрепленного на нем массива 542 формирования ультразвукового изображения из положения, показанного на фиг.35А (например, выровненного с внутренним трубчатым корпусом 538), в положение, представленное на фиг.35В (например, перпендикулярно продольной оси катетера 534 и направленного вперед), внутренний трубчатый корпус 538 может быть повернут по часовой стрелке (как можно видеть в виде с торца) относительно внешнего трубчатого корпуса 536. Такой поворот приводит к тому, что тяга 546 разматывается с внутреннего трубчатого корпуса 538, и опорный участок 540 перемещается в направлении положения, представленного на фиг.35В, под действием упомянутого выше смещения шарнирного участка 544.
Для возврата опорного участка 540 в положение, показанное на фиг.35А, из положения, представленного на фиг.35В, внутренний трубчатый корпус 538 можно повернуть в направлении против часовой стрелки (как можно видеть в виде с торца) относительно внешнего трубчатого корпуса 536. Такой поворот приводит к тому, что тяга 546 будет наматываться на внутренний трубчатый корпус 538, вытягивая, таким образом, опорный участок 540 обратно в положение, показанное на фиг.35А.
Катетер 534 также может включать в себя любое соответствующее электрическое взаимное соединение с массивом 542 формирования ультразвукового изображения, включая в себя соответствующие схемы соединения, описанные здесь. В вариации варианта осуществления изобретения по фиг.35А, опорный участок 540 и шарнирный участок 544 могут быть заменены отдельным элементом, который может быть выполнен аналогично, например, держателям 160, 168, 174 и/или 180, с модификацией, состоящей в том, что соответствующий участок контакта с трубчатым корпусом будет иметь размеры и будет выполнен с возможностью его закрепления на внешнем трубчатом корпусе 536.
При использовании катетер 534 может быть вставлен в тело пациента с опорным участком 540, выровненным с внешним трубчатым корпусом 536. После того, как катетер 534 будет установлен в требуемом положении, внутренний трубчатый корпус 538 может быть повернут относительно внешнего трубчатого корпуса, что обеспечивает перемещение шарнирным участком 544 опорного участка 540 под требуемым углом относительно продольной оси катетера 534. Интервенционное устройство (не показано) может быть продвинуто через канал во внутреннем трубчатом корпусе 538.
На фиг.36А-36С показан катетер 552, который включает в себя трубчатый корпус 554. Трубчатый корпус 554 включает в себя канал 556, сформированный в нем. Трубчатый корпус 554 дополнительно включает в себя канал 558, продолжающийся через боковую стенку трубчатого корпуса 554. Проксимальный конец рычага 560 закреплен на трубчатом корпусе 554 таким образом, что рычаг 560 может шарнирно поворачиваться относительно трубчатого корпуса 554. Рычаг 560 может иметь достаточную жесткость, которая обеспечивает шарнирный поворот массива 562 формирования ультразвукового изображения, как описано ниже. Дистальный конец массива 562 формирования ультразвукового изображения может быть взаимно соединен с дистальным концом рычага 560 таким образом, что, когда массив 562 формирования ультразвукового изображения выровнен с трубчатым корпусом 554, задняя сторона (направленная вверх в ориентации, показанной на фиг.36А) массива 562 формирования ультразвукового изображения, может быть, в общем, параллельна рычагу 560. Катетер 552 дополнительно включает в себя проталкиваемый провод 564, продолжающийся вдоль канала 558. Дистальный конец проталкиваемого провода 564 может быть взаимно соединен с проксимальным концом массива 562 формирования ультразвукового изображения. Взаимное соединение между дистальным концом проталкиваемого провода 564 и проксимальным концом массива 562 формирования ультразвукового изображения может представлять собой жесткое соединение, как показано на фиг.36А-36С, или оно может представлять собой шарнирное соединение или любой другой соответствующий тип соединения. Точка соединения между проталкиваемым проводом 564 и массивом 562 формирования ультразвукового изображения может быть расположена ближе к передней стороне (обращенной вниз в ориентации, показанной на фиг.36А) массива 562 формирования ультразвукового изображения, чем к задней стороне массива 562 формирования ультразвукового изображения. Такое расположение может помочь первичному смещению массива 562 формирования ультразвукового изображения из положения, представленного на фиг.36А, благодаря приложению большего крутящего момента к массиву 562 формирования ультразвукового изображения, чем было бы достигнуто, если бы проталкиваемый провод 564 находился ближе и был бы коллинеарным с рычагом 560.
Для шарнирного поворота массива 562 формирования ультразвукового изображения из положения, представленного на фиг.36А (например, выровненного с трубчатым корпусом 554) в положение, представленное на фиг.36В (например, перпендикулярное продольной оси катетера 552 и направленное вперед) проталкивающий провод 564 можно продвигать относительно трубчатого корпуса 554. Как показано на фиг.36А и 36В, такое относительное движение, в комбинации с возможностью опоры рычага 560 на фиксированном расстоянии между его точкой крепления к трубчатому корпусу 554 и дистальным концом массива 562 формирования ультразвукового изображения может привести к тому, что массив 562 формирования ультразвукового изображения будет шарнирно поворачиваться в положение, в котором он обращен вперед фиг.36В. Следует понимать, что проталкивающий провод 564 должен иметь соответствующую прочность на сжатие для передачи необходимой силы для перемещения массива 562 формирования ультразвукового изображения, как представлено. Для возврата массива 562 формирования ультразвукового изображения в положение, представленное на фиг.36А, из положения, показанного на фиг.36В, проталкивающий провод 564 может быть вытянут.
Катетер 552 также может включать в себя любое соответствующее электрическое соединение с массивом 562 формирования ультразвукового изображения, включая в себя соответствующие схемы соединения, описанные здесь. Например, элемент электрического соединения может быть расположен вдоль рычага 560 и может электрически соединять массив 562 формирования ультразвукового изображения с элементом электрического соединения, расположенным в стенке трубчатого корпуса 554. Кончик (не показан) может быть сформован поверх массива 562 формирования ультразвукового изображения.
Катетер 552 может, кроме того, во время работы разворачивать массив 562 формирования ультразвукового изображения в положение, представленное на фиг.36С, где массив 562 формирования ультразвукового изображения обращен в направлении, по существу, противоположном положению вставки, показанному на фиг.36А. Это может достигаться в результате продолжения проталкивания проталкиваемого провода 564 относительно трубчатого корпуса 554 за пределы положения, показанного на фиг.36В. Следует понимать, что дополнительное продвижение проталкиваемого провода 564 может привести к дополнительному шарнирному повороту массива 562 формирования ультразвукового изображения за пределы, которые представлены на фиг.36С. Также следует понимать, что массив 562 формирования ультразвукового изображения может быть расположен в любом промежуточном положении между описанными положениями.
На фиг.37А и 37В представлен катетер 568, который представляет собой вариацию катетера 552, показанного на фиг.36А и 36В. Также аналогичные компоненты имеют аналогичные номера ссылочных позиций и не будут описаны со ссылкой на фиг.37А и 37В. Рычаг 570 закреплен на дистальном конце трубчатого корпуса 554. Рычаг 570 может, например, быть выполнен в виде гибкой платы, которая включает в себя электрические проводники для соединения с массивом 562 формирования ультразвукового изображения. В вариантах осуществления изобретения, в случае, когда рычаг 570 включает в себя гибкую плату, такая гибкая плата может включать в себя усилительные или другие элементы, который способствуют использованию гибкой платы, как описано ниже (например, использованию в качестве шарнира). Рычаг 570 может иметь достаточную гибкость, обеспечивая возможность шарнирного поворота массива 562 формирования ультразвукового изображения, как описано ниже. Рычаг 570 может быть соединен с массивом 562 формирования ультразвукового изображения вдоль задней стороны массива 562 формирования ультразвукового изображения. Катетер 568 дополнительно включает в себя проталкиваемый провод 572, продолжающийся вдоль канала 558. Дистальный конец проталкиваемого провода 572 взаимно соединен с проксимальным концом массива 562 формирования ультразвукового изображения, как и в катетере 552 по фиг.36А и 36В.
Для шарнирного поворота массива 562 формирования ультразвукового изображения из положения, представленного на фиг.37А, в положение, показанное на фиг.37В, проталкиваемый провод 572 может быть продвинут относительно трубчатого корпуса 554. Как показано на фиг.37А и 37В, такое относительное движение, в комбинации с гибкостью рычага 570, может привести к шарнирному повороту массива 562 формирования ультразвукового изображения в положение, в котором он обращен вперед фиг.37 В. Для возврата массива 562 формирования ультразвукового изображения в положение, представленное на фиг.37А, из положения, показанного на фиг.37В, проталкиваемый провод 572 может быть вытянут обратно. Кончик (не показан) может быть сформован поверх массива 562 формирования ультразвукового изображения.
На фиг.38А и 38В представлен катетер 576, который выполнен аналогично катетерам по фиг.7А-8D в том, что относительное движение компонентов может привести к тому, что отклоняющийся участок внешнего трубчатого корпуса 578 будет отклонять массив формирования ультразвукового изображения в положение, в котором он обращен вперед. В случае катетера 576, массив формирования ультразвукового изображения может включать в себя первый массив 586а формирования изображения и второй массив 586b формирования изображения. Как представлено на фиг.38А, вводимая конфигурация (например, конфигурация катетера 576, в том виде, как его вводят в тело пациента) катетера 576 включает в себя первый и второй массивы 586а, 586b формирования изображения во взаимной компоновке один за другим, по меньшей мере, с частично сжатым внутренним трубчатым корпусом 580 между массивами 586а, 586b формирования изображения. Внутренний трубчатый корпус 580 может включать в себя канал 582, сформированный в нем. Внешний трубчатый корпус 578 и внутренний трубчатый корпус 580 могут быть фиксированными относительно друг друга в одной точке на дистальном конце 584 катетера 576.
Для перемещения массива 586а, 586b формирования изображения из положений, представленных на фиг.38А (например, установленных в боковом направлении) в положения, представленные на фиг.38В (например, в положение, направленное вперед), проксимальный конец внешнего трубчатого корпуса 578 можно проталкивать дистально при удержании положения внутреннего трубчатого корпуса 580 (и/или проксимальный конец внутреннего трубчатого корпуса 580 можно вытягивать проксимально, при поддержании положения внешнего трубчатого корпуса 578). Такое относительное движение может привести к тому, что участки внешнего трубчатого корпуса 578, содержащие массивы 586а, 586b формирования изображения, будут смещены наружу, приводя, таким образом, к шарнирному повороту массива 586а, 586b формирования изображения в положения, в которых он обращены вперед, как показано на фиг.38 В. Для того, чтобы способствовать управлению движением массивов 586а, 586b формирования изображения, внешний трубчатый корпус 578 может включать в себя первые жесткие участки 588 (например, достаточной жесткости, для выполнения функции, как описано здесь), которые остаются, по существу, прямыми, по мере того, как массивы 586а, 586b формирования изображения шарнирно поворачивают. Первые жесткие участки 588 могут быть сформированы путем использования соответствующих элементов, жесткость которых повышается, для внешнего трубчатого корпуса 578. Кроме того, внешний трубчатый корпус 578 может включать в себя вторые жесткие участки 590, расположенные проксимально массивам 586а, 586b формирования изображения. Вторые жесткие участки 590 могут использоваться для уменьшения или устранения передачи силы сгиба к массивам 586а, 586b формирования изображения во время шарнирного поворота и для того, чтобы помочь в выравнивании массивов 586а, 586b формирования изображения. Как показано на фиг.38В, после того, как массивы 586а, 586b формирования изображения будут установлены в положение, в котором они обращены вперед, канал 582 будет доступен для подачи соответствующего интервенционного устройства в точку, дистальную для дистального конца 584 катетера.
Катетер 576 также может включать в себя любое соответствующее электрическое соединение с массивами 586а, 586b, формирования изображения, включая в себя соответствующие схемы соединения, описанные здесь. Например, элемент электрического соединения может быть расположен вдоль внешнего трубчатого корпуса 578, и первого и второго жестких участков 588, 590.
На фиг.39А и 39В представлен катетер 594, который представляет собой вариант катетера 576 по фиг.38А и 38В. Также, аналогичные компоненты пронумерованы аналогично и не будут описаны со ссылкой на фиг.39А и 39В. Как представлено на фиг.39А, конфигурация во время ввода катетера 594 включает в себя первый массив 598а формирования изображения и второй массив 598b формирования изображения, расположенный со смещением (например, они занимают разные положения вдоль длины катетера 594) в последовательной компоновке с, по меньшей мере, частично сжатым внутренним трубчатым корпусом 580 проксимально массивам 598а, 598b формирования изображения. Внутренний трубчатый корпус 580 может включать в себя канал 582, сформированный в нем. Внешний трубчатый корпус 596 и внутренний трубчатый корпус 580 могут быть фиксированными относительно друг друга на дистальном конце 584 катетера 594.
Массивы 598а и 598b формирования изображения могут шарнирно поворачиваться аналогично тому, как описано выше со ссылкой на фиг.38А и 38 В. Внешний трубчатый корпус 596 может включать в себя вторые жесткие участки 600, 602, расположенные проксимально массивам 598а, 598b формирования изображения. Вторые жесткие участки 600, 602 могут использоваться для уменьшения или устранения передачи сил изгиба на массивы 598а, 598b формирования изображения во время их шарнирного поворота и с тем, чтобы способствовать выравниванию массивов 598а, 598b формирования изображения. Как показано на фиг.38В, вторые жесткие участки 600, 602 каждый может устанавливать массивы 598а, 598b формирования изображения на уникальном расстоянии от центральной оси катетера 594.
Массивы 586а, 586b, 598а, 598b формирования изображения на фиг.38А-39В показаны, как проксимальные для дистальных концов 584 катетеров 576, 594. В альтернативных конфигурациях массивы 586а, 586b, 598а, 598b формирования изображения могут быть расположены на заданном расстоянии от дистальных концов 584. В этом отношении, массивы 586а, 586b, 598а, 598b формирования изображения могут быть расположены в любой соответствующей точке вдоль катетеров 576, 594.
На фиг.40А и 40В представлен катетер 604, который включает в себя трубчатый корпус 606 с каналом 608, сформированным в нем. Трубчатый корпус 606 включает в себя множество спирально расположенных прорезей (прорези 610а, 610b, 610c и 610d видны на фиг.40А), формирующих множество рычагов, таких как рычаги 612а, 612b и 612с. Любое соответствующее количество прорезей, для определения любого соответствующего количества рычагов может быть включено в трубчатый корпус 606. По меньшей мере, один из рычагов может включать в себя массив формирования ультразвукового изображения. Например, в одном варианте осуществления изобретения, показанном на фиг.40А и 40В, рычаги 612а и 612b включают в себя массивы 614а и 614b формирования ультразвукового изображения, соответственно. Относительное вращение (например, в направлении стрелки-указателя 620) дистального участка 616 (дистального для рычагов 612а-612 с) трубчатого корпуса 606 к проксимальному участку 618 (проксимальному для рычагов 612а-612с) трубчатого корпуса 606 может привести к тому, что рычаги будут отклоняться наружу, как представлено на фиг.40В, перемещая массивы 614а и 614b формирования ультразвукового изображения, в общем, в положения, направленные вперед. Интервенционное устройство может быть продвинуто через канал 608.
Относительный поворот между дистальным участком 616 и проксимальным участком 618 может быть достигнут любым соответствующим образом. Например, катетер 604 может включать в себя внутренний трубчатый корпус (не показан), аналогичный внутреннему трубчатому корпусу катетера 576 по фиг.38А и 38В. Такой внутренний трубчатый корпус может быть закреплен на трубчатом корпусе 606 на дистальном участке 616. В таком варианте осуществления поворот внутреннего трубчатого корпуса относительно трубчатого корпуса 616 может привести к тому, что дистальный участок 616 (благодаря закреплению на внутреннем трубчатом корпусе) будет поворачиваться относительно проксимального участка 618, вызывая, таким образом, изгиб рычагов наружу, как представлено на фиг.40В. Кроме того, внутренний трубчатый корпус может включать в себя канал, сформированный в нем (например, для размещения интервенционного устройства).
На фиг.41А и 41В представлен катетер 624, который включает в себя внешний трубчатый корпус 626 и внутренний трубчатый корпус 628. Внутренний трубчатый корпус 628 включает в себя канал, сформированный в нем. Массив 630 формирования ультразвукового изображения взаимно соединен с внутренним трубчатым корпусом 628. В непосредственной близости к массиву 630 формирования ультразвукового изображения, внутренний трубчатый корпус 628 может быть разрезан вдоль продольной оси внутреннего трубчатого корпуса 628, разделяя, таким образом, внутренний трубчатый корпус 628 на первый продольный участок 632 и второй продольный участок 634. Массив 630 формирования ультразвукового изображения расположен на дистальной половине первого продольного участка 632. Дистальные концы первого и второго продольных участков 632, 634 могут оставаться взаимно соединенными друг с другом и с дистальным участком внутреннего трубчатого корпуса 628. Проксимальный конец первого продольного участка 632 может быть отделен от остального внутреннего трубчатого корпуса 628 вдоль продольного разреза 636. Второй продольный участок 634 остается соединенным с внутренним трубчатым корпусом 628. Проксимальный конец первого продольного участка 632 может быть изогнут или по-другому закреплен на внешнем трубчатом корпусе 626 в соединении 638. Первый продольный участок 632 может включать в себя шарнир 640. Шарнир 640 может представлять собой участок первого продольного участка 632, сформованный таким образом, что первый продольный участок 632 избирательно выгибается и/или изгибается в шарнире 640, когда внешний трубчатый корпус 626 продвигают дистально относительно внутреннего трубчатого корпуса 628 (и/или внутренний трубчатый корпус 628 отводят проксимально относительно внешнего трубчатого корпуса 626).
Для перемещения массива 630 формирования ультразвукового изображения из положения, представленного на фиг.41А (например, где он обращен в сторону) в положение, показанное на фиг.41В (например, где он, по меньшей мере, частично обращен вперед), внешний трубчатый корпус 626 продвигают дистально относительно внутреннего трубчатого корпуса 628. Поскольку Проксимальный конец первого продольного участка 632 соединен с внешним трубчатым корпусом 626, и дистальный конец внутреннего трубчатого корпуса 628 закреплен, продвижение внешнего трубчатого корпуса 626 приводит к изгибу первого продольного участка 632 в месте шарнира 640, в результате чего происходит поворот массива 630 формирования ультразвукового изображения так, что поле обзора массива 630 формирования ультразвукового изображения, по меньшей мере, частично будет обращено вперед, как показано на фиг.41 В. Первый продольный участок 632 может возвращаться в положение, представленное на фиг.41 А, в результате проксимального отвода внешнего трубчатого корпуса 626 относительно внутреннего трубчатого корпуса 628.
На фиг.41C представлен катетер 642, который является вариацией катетера 624 по фиг.41А и 41В. Также аналогичные компоненты пронумерованы аналогично и не будут описаны со ссылкой на фиг.41C. Как показано на фиг.41C, внутренний трубчатый корпус 646 может включать в себя первый и второй продольные участки 632, 634. Однако, в отличие от варианта осуществления изобретения, показанного на фиг.41А и 41В, где первый и второй продольные участки 632, 634 расположены проксимально дистальному концу катетера 642, первый и второй продольные участки 632, 634 катетера 642 могут быть расположены в любой соответствующей точке вдоль катетера 642. Внешний трубчатый корпус 644 может включать в себя окно 648, для размещения первого продольного участка 632. Массив 630 формирования ультразвукового изображения по фиг.41C может шарнирно отклоняться аналогично тому, как описано выше со ссылкой на фиг.41А и 41В.
Катетер 642 также включает в себя второй массив 650 формирования ультразвукового изображения, который ориентирован так, что он формирует изображение, по меньшей мере, частично обращенное назад. Массив 650 формирования ультразвукового изображения может быть предусмотрен в дополнение к массиву 630 формирования ультразвукового изображения, или он может представлять собой единственный массив формирования изображения катетера 642.
На фиг.41C показан катетер с разрезом (например, первый продольный участок 632), который имеет длину и который выполнен таким образом, что при разворачивании концы отрезка остаются расположенными вдоль корпуса катетера, в то время как центральный участок изгибается наружу от корпуса катетера. В этом отношении массив формирования ультразвукового изображения, расположенный на центральном участке, может быть развернут. Несколько других вариантов осуществления с аналогичной конфигурацией раскрыты здесь. Они включают в себя, например, варианты осуществления изобретения, показанные на фиг.7А-8D, 38А-39В и 40А-41В. В каждом из этих вариантов осуществления изобретения, и в других соответствующих вариантах осуществления изобретения, раскрытых здесь, один или несколько массивов формирования ультразвукового изображения могут быть расположены в любом соответствующем местоположении на центральном участке. Таким образом, в этих вариантах осуществления изобретения, массивы формирования ультразвукового изображения могут быть расположены таким образом, что они движутся в положение, где они обращены вперед, в положение, где они обращены назад, или они оба могут быть развернуты одновременно.
Катетеры 624, 642 могут также включать в себя любое соответствующее электрическое соединение с массивом 630 формирования ультразвукового изображения, включающим в себя соответствующие схемы соединения, описанные здесь. Например, элементы электрического соединения могут быть расположены вдоль внутренних трубчатых корпусов 628, 646.
В дополнение к развертыванию массива формирования ультразвукового изображения для получения изображений области, представляющей интерес, развертывание массивов формирования ультразвукового изображения также может способствовать установлению положения канала (например, для введения интервенционного устройства или другого соответствующего устройства). Например, развертывание массива 37 ультразвуковых преобразователей по фиг.8С (трехлепестковая конфигурация) может привести к тому, что каждый из трех лепестков катетера будет перемещаться, например, относительно стенок кровеносного сосуда, в котором был развернут катетер. В результате, конец канала 38 может быть, в общем, расположен в центре кровеносного сосуда. В других вариантах осуществления изобретения, описанных здесь, таких как, например, варианты, описанные со ссылкой на фиг.38А-40В, также может быть предусмотрен канал, в общем, в центре канала (например, кровеносного сосуда) во время развертывания массива формирования ультразвукового изображения (например, если канал имеет размер, который, в общем, соответствует размеру катетера, когда разворачивают массив формирования ультразвукового изображения).
На фиг.42А-42С показан примерный пружинный элемент 652, который может использоваться для генерирования возвратной силы, которая помогает возвращать развернутый массив формирования ультразвукового изображения в направлении положения, которое он занимал перед развертыванием. Пружинный элемент 652 может включать в себя любое соответствующее количество пружин. Например, и как представлено на фиг.42А-42С, пружинный элемент 652 может включать в себя три пружины 654а, 654b, 654 с, расположенные между двумя концевыми участками 65ба, 656b. Пружинный элемент 652, например, может быть изготовлен из такой заготовки, как представлено на фиг.42В. Заготовка может быть свернута для формирования цилиндрической конфигурации по фиг.42А. Концы концевых участков 65ба, 656b могут быть соединены для поддержания цилиндрической конфигурации фиг.42А. Пружины 654а, 654b, 654 с могут включать в себя узкие области, такие как узкие области 658, расположенные вдоль пружины 654b, расположенной приблизительно в средней точке пружин 654а, 654b, 654с, и на каждом конце каждой пружины 654а, 654b, 654с. Узкие области могут действовать, как шарниры, обеспечивая преимущественные точки изгиба для пружин 654а, 654b, 654с. Соответственно, если сила сжатия будет приложена к пружинному элементу 652 (например, к концевым участкам 65ба, 656b), каждая из пружин 654а, 654b, 654с может отклоняться наружу, как представлено на фиг.42С. Один или несколько массивов формирования ультразвукового изображения, связанных с одной или несколькими пружинами 654а, 654b, 654с, будет, следовательно, шарнирно повернут.
Конфигурация пружинного элемента 652 может, например, быть расположена внутри боковой стенки корпуса катетера в соответствии с вариантом осуществления изобретения, показанным на фиг.8С. Каждая из пружин 654а, 654b, 654с может быть расположена на одном из лепестков трехлепестковой конструкций по фиг.8С. Будучи интегрированным в катетер фиг.8С, пружинный элемент 652 может обеспечивать возвратную силу, которая смещает катетер в направлении прямого, неразвернутого положения (например, для вставки катетера, установки его и удаления). В другом примере пружинный элемент, аналогичный пружинному элементу 652 (например, с соответствующим количеством соответствующим образом сформированных пружин), может быть развернут в трубчатом корпусе 606 катетера 604 по фиг.40А и 40В для обеспечения силы смещения в направлении прямой конфигурации, как представлено на фиг.40А.
В еще одном, другом примере, пружинные элементы, аналогичные пружинному элементу 652 (например, но с двумя пружинами), могут быть развернуты внутри внешних трубчатых корпусов 578, 596 катетеров 576, 594 по фиг.38А-39В, для обеспечения силы смещения в направлении прямых конфигураций, как показано на фиг.38А и 39А. В еще одном, другом примере, соответствующим образом модифицированный пружинный элемент, аналогичный пружинному элементу 652 (например, но с одной пружиной), может быть развернут в пределах внутреннего трубчатого корпуса 628 катетера 624 фиг.41А для обеспечения силы смещения, направленной к прямой конфигурации, как представлено на фиг.41А.
На фиг.43А-43С показан катетер 662, который включает в себя внешний трубчатый корпус 664. Массив 666 формирования ультразвукового изображения взаимно соединен с внешним трубчатым корпусом 664. Катетер 662 включает в себя сжимаемый канал 668. Сжимаемый канал 668, в общем, продолжается вдоль длины катетера 662 в центральной полости внешнего трубчатого корпуса 664. Однако рядом с дистальным концом катетера 662 сжимаемый канал 668 направлен через боковое отверстие 670 из внешнего трубчатого корпуса 664. На заданном расстоянии, сжимаемый канал 668 продолжается вдоль внешней поверхности внешнего трубчатого корпуса 664. Рядом с дистальным концом катетера 662 (в точке, дистальной для бокового отверстия 670), сжимаемый канал 668 взаимно соединен с концевым отверстием 672. Концевое отверстие 672 представляет собой поперечное сквозное отверстие, расположенное вблизи кончика 674 катетера 662. Концевое отверстие 672 может быть выполнено таким образом, что отверстие концевого отверстия 672 будет расположено с той же стороны внешнего трубчатого корпуса 664, что и передняя сторона массива 666 формирования ультразвукового изображения.
Во время вставки катетера 662 в тело пациента, катетер 662 может быть выполнен, как показано на фиг.43А с кончиком 674, в общем, направленным вдоль продольной оси катетера 662. Кроме того, участок сжимаемого канала 668, внешний для внешнего трубчатого корпуса 664 (например, участок сжимаемого канала между отверстием стороны 670 и концевым отверстием 672) может быть сжимаемым и, в общем, может быть расположенным на внешней стенки внешнего трубчатого корпуса 664.
Когда требуется получить изображения области, дистальной для кончика 674, сжимаемый канал 668 можно проталкивать проксимально относительно внешнего трубчатого корпуса 664. В результате этого, дистальный конец катетера 662 может изгибаться (вверх в ориентации, показанной на фиг.43В) так, что массив 666 формирования ультразвукового изображения шарнирно поворачивается в положение, где он обращен вперед. Для достижения такого движения изгиба, дистальный конец катетера 662 может быть разработан таким образом, что область между массивом 666 формирования ультразвукового изображения и боковым отверстием 670 будет относительно гибкой, в то время как область, включающая в себя массив 666 формирования ультразвукового изображения, и дистальная для массива формирования ультразвукового изображения, будет относительно жесткой. В соответствии с этим, вытягивание сжимаемого канала 668 проксимально может привести к изгибу относительно гибкой области, что приводит к тому, что массив 666 формирования ультразвукового изображения будет обращен вперед и отверстие концевого отверстия 672 будет шарнирно поворачиваться в направлении, обращенном вперед, как показано на фиг.43В.
Когда требуется вставить интервенционное устройство 676 в тело пациента, интервенционное устройство 676 может быть продвинуто дистально через сжимаемый канал 668. По мере продвижения интервенционного устройства 676 через боковое отверстие 670 боковое отверстие 670 может смещаться таким образом, что оно будет расположено на линии с центральной полостью внешнего трубчатого корпуса 664. По мере того, как интервенционное устройство 676 перемещается через участок сжимаемого канала 668, внешний для внешнего трубчатого корпуса 664, этот участок сжимаемого канала 668 также может перемещаться таким образом, что он будет выровнен с центральной полостью внешнего трубчатого корпуса 664. По мере того, как интервенционное устройство 676 перемещается через концевое отверстие 672, концевое отверстие 672 также может перемещаться таким образом, что оно также будет выровнено с центральной полостью внешнего трубчатого корпуса 664, и участок сжимаемого канала 668, внешний для внешнего трубчатого корпуса 664. По мере того, как интервенционное устройство 676 продвигается вперед, массив 666 формирования ультразвукового изображения может быть смещен перпендикулярно (например, вниз в ориентации, представленной на фиг.43С) относительно продольной оси катетера 662. Следует понимать, что массив формирования ультразвукового изображения 666 может оставаться работоспособным для генерирования изображений, дистальных для кончика 674, в то время как интервенционное устройство 676 разворачивают дистально относительно кончика 674.
После отвода интервенционного устройства 676, катетер 662 может быть возвращен в положение выравнивания (например, в конфигурацию по фиг.43А) для последующей повторной установки или удаления. В одном варианте осуществления изобретения дистальный конец катетера 662 может включать в себя пружинный элемент, который может возвращать катетер 662 в выровненное положение, после того, как внешняя сила смещения (например, сила отвода, действующая на сжимаемый канал 668, и/или сила смещения, вызванная присутствием интервенционного устройства 676), будет устранена. В другом варианте осуществления изобретения тонкий зонд (например, относительно жесткий провод, не показан), может быть продвинут через канал 678 тонкого зонда. Тонкий зонд может иметь достаточную жесткость для возврата конца катетера 662 в направлении выровненного положения (например, в положение по фиг.43А).
Катетер 662 также может включать в себя любое соответствующее электрическое соединение с массивом 666 формирования ультразвукового изображения, включая соответствующие схемы соединения, описанные здесь. Например, элементы электрического соединения могут быть расположены вдоль внешнего трубчатого корпуса 664.
На фиг.44А и 44В показан катетер 682, который включает в себя трубчатый корпус 684. Трубчатый корпус может иметь такие размеры и конфигурацию, что он может подавать управляемый катетер 686 формирования изображений в выбранное место внутри тела пациента. Управляемый катетер 686 формирования изображений может включать в себя массив 688 формирования ультразвукового изображения, расположенный на его дистальном конце. С внешней поверхностью трубчатого корпуса 684 может быть соединен расширяемый канал 690. Как показано на фиг.44А, расширяемый канал 690 может быть вставлен в сжатом состоянии, уменьшая, таким образом, поперечное сечение катетера 682 во время вставки. Как только катетер 682 будет удовлетворительно установлен, интервенционное устройство (не показано) может быть подано через расширяемый канал 690. Расширяемый канал 690 может расширяться, по мере того, как интервенционное устройство продвигается через расширяемый канал 690. Расширяемый канал 690 может быть изготовлен из любого соответствующего материала катетера, включая в себя, в качестве примера, ePTFE, силикон, уретан, РЕВАХ®, латекс и/или любую их комбинацию. Расширяемый канал 690 может быть упругим и может растягиваться до диаметра интервенционного устройства, по мере того, как вводят интервенционное устройство. В другой компоновке расширяемый канал 690 может быть неэластичным и может разворачиваться, по мере того, как вводят интервенционное устройство. Например, расширяемый канал 690 может включать в себя трубку из пленки. В другой компоновке расширяемый канал 690 может включать в себя упругие и неупругие материалы.
На фиг.45А и 45В показан корпус 694 катетера. Конфигурация при вводе представлена на фиг.45А. Конфигурация при вводе может включать в себя вложенный участок 696. После того, как корпус 694 катетера будет удовлетворительно установлен, интервенционное устройство (не показано) может быть подано через него. Корпус 694 катетера может расширяться, по мере того, как интервенционное устройство продвигается. Расширение корпуса 694 катетера может содержать проталкивание вложенного участка 696 наружу, до тех пор, пока он не сформирует часть, в общем, трубчатого корпуса катетера, как представлено на фиг.45В. В этом отношении, корпус 694 катетера может быть введен в тело пациента, находясь в конфигурации с первой площадью поперечного сечения. Затем, в выбранный момент времени, интервенционное устройство может быть вставлено через корпус 694 катетера, и корпус 694 катетера может расширяться до второй площади поперечного сечения, в то время как вторая площадь поперечного сечения больше, чем первая площадь поперечного сечения. Деформация корпуса 694 катетера из вложенной конфигурации (фиг.45А) в расширенную конфигурацию (фиг.45В) может представлять собой упругую деформацию, в то время как после перемещения интервенционного устройства корпус 694 катетера выполнен с возможностью возврата в направлении его исходного профиля, или может возникать, по меньшей мере, частично пластическая деформация.
На фиг.46А и 46В показан катетер 700, который включает в себя внешний трубчатый корпус 702 и внутренний трубчатый корпус 704. Внутренний трубчатый корпус 704 может включать в себя канал, сформированный в нем. Катетер 700 также включает в себя массив 706 формирования ультразвукового изображения, взаимно соединенный с держателем 708 кончика внутреннего трубчатого корпуса 704. Держатель 708 кончика внутреннего трубчатого корпуса 704 взаимно соединен с дистальным концом внутреннего трубчатого корпуса 704 с помощью шарнирного участка 710 внутреннего трубчатого корпуса 704. Держатель 708 кончика и шарнирный участок 710 внутреннего трубчатого корпуса 704 могут быть сформированы, например, путем выреза участка дистального конца внутреннего трубчатого корпуса 704, оставляя участок (держатель 708 кончика), с которым может быть взаимно соединен массив 706 формирования ультразвукового изображения и участок (шарнирный участок 710), который может действовать, как шарнир между держателем 708 кончика и трубчатым концом 711 внутреннего трубчатого корпуса 704. Внутренний трубчатый корпус 704 может иметь любую соответствующую конструкцию. Например, внутренний трубчатый корпус 704 может быть выполнен аналогично внутреннему трубчатому корпусу 80 по фиг.5Е, в дополнение к плетеной сетке, для усиления внутреннего трубчатого корпуса 704. Плетеная сетка может использоваться для предоставления возвратной силы, для возврата массива 706 формирования ультразвукового изображения в положение при вводе (как показано на фиг.46А) из развернутого положения (как показано на фиг.46В).
Шарнирный участок 710 может обеспечивать возможность шарнирного поворота держателя 708 кончика вокруг шарнирного участка 710 относительно внутреннего трубчатого корпуса 704. Элемент 712 электрического соединения может быть электрически соединен с массивом 706 формирования ультразвукового изображения. Элемент 712 электрического соединения соединен с дистальным концом массива 706 формирования ультразвукового изображения. Элемент 712 электрического соединения может быть соединен или по-другому закреплен с участком 714 держателя 708 кончика на противоположной стороне держателя кончика от массива 706 формирования ультразвукового изображения. Элемент 712 электрического соединения может включать в себя петлю 716 между соединением с массивом 706 формирования ультразвукового изображения и участком 714. Участок 714, благодаря своему фиксированному положению относительно держателя 708 кончика может использоваться, как разгрузчик натяжения, предотвращающий передачу натяжения, связанного с шарнирным поворотом массива 706 формирования ультразвукового изображения, на петлю 716 и массив 706 через элемент 712 электрического соединения. Участок 718 тяги элемента 712 электрического соединения может быть расположен между соединенным участком 714 и точкой, где элемент 712 электрического соединения входит во внешний трубчатый корпус 702. Участок 718 тяги может представлять собой немодифицированный участок элемента 712 электрического соединения, или он может быть модифицирован (например, конструктивно усилен) для обеспечения возможности воздействия дополнительных сил при выполнении его функции тяги. Держатель 708 кончика и массив 706 формирования ультразвукового изображения могут быть окружены или по-другому расположены внутри кончика (не показан).
Во время вставки в тело пациента катетер 700 может быть расположен, как показано на фиг.46А, с массивом 706 формирования ультразвукового изображения, выровненным с внутренним трубчатым корпусом 704, и с полем обзора массива 706 формирования ультразвукового изображения, направленным перпендикулярно продольной оси катетера 700 (вниз, как показано на фиг.46А). В этом отношении, катетер 700 может, по существу, содержаться внутри диаметра, равного внешнему диаметру внешнего трубчатого корпуса 702. Если требуется, массив 706 формирования ультразвукового изображения может быть шарнирно повернут относительно внутреннего трубчатого корпуса 704 путем перемещения внутреннего трубчатого корпуса 704 дистально относительно внешнего трубчатого корпуса 702. Такое относительное движение может привести к шарнирному повороту массива 706 формирования ультразвукового изображения вокруг шарнирного участка 710, из-за ограничения движения массива 706 формирования ультразвукового изображения участком 718 тяги. Массив 706 формирования ультразвукового изображения может возвращаться в положение, показанное на фиг.46А, путем передвижения внутреннего трубчатого корпуса 704 проксимально относительно внешнего трубчатого корпуса 702.
На фиг.47А и 47В показан катетер 720, который включает в себя трубчатый шарнир 722, взаимно соединенный с дистальным концом трубчатого корпуса 724. Трубчатый шарнир 722 и трубчатый корпус 724 могут включать в себя канал, сформированный в них, для введения интервенционного устройства. Катетер 720 также включает в себя массив 726 формирования ультразвукового изображения, взаимно соединенный с держателем 728 трубчатого шарнира 722. Шарнирный участок 730 трубчатого шарнира 722 расположен между держателем 728 трубчатого шарнира 722 и трубчатым участком 732 трубчатого шарнира 722. Катетер 720 дополнительно включает в себя провод 734, соединенный с держателем 728, и продолжающийся вдоль трубчатого шарнира 722 и трубчатого корпуса 724. Нажатие на проксимальный конец провода 732 может привести к тому, что держатель 728 будет шарнирно поворачиваться относительно трубчатого участка 732 вокруг шарнирного участка 730, как показано на фиг.47 В. Высвобождение силы нажима на провод 734 и/или нажатие на проксимальный конец провода 734 может привести к тому, что держатель 728 вернется в положение, показанное на фиг.47А. Трубчатый шарнир 722 может включать в себя материал с памятью формы (например, Нитинол) и/или пружинящий материал, таким образом, что трубчатый шарнир 722 может возвращаться в направлении положения, представленного на фиг.47А, как только сила натяжения будет устранена. Элемент 736 электрического соединения может быть электрически соединен с массивом 726 формирования ультразвукового изображения. Элемент 736 электрического соединения может быть в виде гибкой платы или другого гибкого проводящего элемента. Элемент 736 электрического соединения может быть направлен через трубчатый шарнир 722, как показано на фиг.47А и 47В и затем может быть взаимно соединен со спирально намотанным элементом электрического соединения, расположенным внутри трубчатого корпуса 724 (например, аналогично элементу 104 электрического соединения фиг.5Е). Держатель 728 и массив 726 формирования ультразвукового изображения могут быть окружены или по-другому расположены внутри кончика (не показан).
Во время вставки в тело пациента катетер 720 может быть расположен, как показано на фиг.47А, с массивом 726 формирования ультразвукового изображения выровненным вдоль оси трубчатого корпуса 724 и с полем обзора массива 726 формирования ультразвукового изображения, направленным перпендикулярно к продольной оси катетера 720 (вниз, как показано на фиг.47А). При этом катетер 720 может, по существу, содержаться внутри диаметра, равного внешнему диаметру трубчатого корпуса 724. Если требуется, массив 726 формирования ультразвукового изображения может шарнирно поворачиваться относительно трубчатого корпуса 724 путем перемещения провода 734 дистально относительно трубчатого корпуса 724. Такое относительное движение может привести к шарнирному повороту массива 726 формирования ультразвукового изображения вокруг шарнирного участка 730 из-за ограничения движения массива 726 формирования ультразвукового изображения трубчатым шарниром 722.
На фиг.48А - 48D показан катетер 740, который включает в себя трубчатый корпус 742, включающий в себя канал 744, сформированный в нем. Катетер 740 также включает в себя кончик 746, который в свою очередь включает в себя массив 748 формирования ультразвукового изображения. Кончик 746 может быть взаимно соединен с трубчатым корпусом 742 промежуточным участком 750. Провод 752 закреплен на дистальном участке кончика 746 на креплении 754 провода. Провод 752 может быть изготовлен из любого соответствующего материала или группы материалов, включающих в себя, но без ограничений, металлы и полимеры. Провод 752 направлен снаружи (относительно кончика 746) от крепления 754 провода до отверстия 756 подачи тонкого провода на дистальном участке кончика 746. Провод 752 пропущен через отверстие 756 подачи провода и поступает внутрь кончика 746. После этого провод 752 продолжается внутри вдоль кончика 746, промежуточного участка 750 и, по меньшей мере, участка трубчатого корпуса 742. Проксимальный конец провода 752 (не показан) может быть доступен для оператора катетера 740. Катетер 740 может быть выполнен таким образом, что в отсутствие приложенных снаружи сил, кончик 746 и промежуточный участок 750 выровнены вдоль оси с трубчатым корпусом 742, как показано на фиг.48А. При этом материал с памятью формы (например, Нитинол) или пружинящий материал может быть внедрен в катетер 740 таким образом, что кончик 746 и промежуточный участок 750 могут возвратиться в положение, показанное на фиг.48А, как только любые внешние силы будут устранены.
Во время вставки в тело пациента катетер 740 может быть расположен, как показано на фиг.48А, на которой кончик 746 и промежуточный участок 750 выровнены вдоль оси с трубчатым корпусом 742, и поле обзора массива 748 формирования ультразвукового изображения направлено перпендикулярно продольной оси катетера 740 (в общем, вверх, как показано на фиг.48А). При этом кончик 746 может, по существу, содержаться внутри диаметра, равного внешнему диаметру трубчатого корпуса 742.
Если требуется, кончик 746, который включает в себя массив 748 формирования ультразвукового изображения, может шарнирно поворачиваться относительно трубчатого корпуса 742 в положении, в котором он обращен вперед, где массив 748 формирования ультразвукового изображения может использоваться для генерирования изображений объема, дистального для катетера 740. Для шарнирного поворота кончика 746, первый этап может состоять в том, чтобы подать участок провода 752 через отверстие 756 подачи провода для формирования петли 758 (кольца из провода 752, внешнего для кончика 746), показанной на фиг.48 В. Отверстие 756 подачи провода и соответствующие каналы в участке 746 кончика могут быть выполнены таким образом, что, после такой подачи, провод 752, в общем, формирует петлю 758 в плоскости, перпендикулярной продольной оси катетера 740, и окружает цилиндрическое дистальное продолжение канала 744. В соответствии с этим, когда интервенционное устройство 760 подают дистально из канала 744, оно проходит через петлю 758, как показано на фиг.48С. После подачи интервенционного устройства 760 через петлю 758, провод 752 может быть протянут в кончик 746 через отверстие 756 подачи провода таким образом, что петля 758 захватывает интервенционное устройство 760 так, что дистальный конец кончика 746 и интервенционное устройство 760 перемещаются в тандеме. После захвата интервенционное устройство 760 может перемещаться проксимально относительно трубчатого корпуса 742, обеспечивая шарнирный поворот участка кончика 746 таким образом, что массив 748 формирования ультразвукового изображения находится, по меньшей мере, частично в положении, в котором он обращен вперед, как показано на фиг.48D. Промежуточный участок 750 может быть выполнен таким образом, что он изгибается в первой области 762 изгиба и второй области 764 изгиба, с тем, чтобы способствовать шарнирному повороту кончика 746, как показано на фиг.48D. Для возврата кончика 746 в направлении установки его положения на фиг.48А, интервенционное устройство 760 может, во время захвата с помощью петли 758 быть перемещено дистально, и/или петля 758 может быть ослаблена с освобождением дистального конца кончика 746 и интервенционного устройства 760 (обеспечивая, таким образом, перемещение кончика 746 с помощью материала с памятью формы и/или пружинного материала).
Катетер 740 может также включать в себя любое соответствующее электрическое соединение с массивом 748 формирования ультразвукового изображения, включающим в себя соответствующие схемы соединения, описанные здесь. Например, элементы электрического соединения могут быть расположены вдоль трубчатого корпуса 742 и промежуточного участка 750.
На фиг.49А и 49В показан катетер 768, который включает в себя внешний трубчатый корпус 770 и внутренний трубчатый корпус 772. Катетер 768 также включает в себя массив 778 формирования ультразвукового изображения и держатель 774 с шарнирным участком 776. Держатель 774 и массив 778 формирования ультразвукового изображения могут быть расположены внутри кончика 780. Катетер 768 в определенной степени аналогичен катетеру 54 по фиг.5В-5D, и, поэтому, аналогичные особенности не будут повторно описаны. Пример различий между катетером 768 и катетером 54 состоит в том, что гибкая плата 782 катетера 768 расположена вдоль внешней нижней поверхности (если смотреть на фиг.49А) держателя 774 и включает в себя конечную петлю 784, где гибкая плата 782 соединена с дистальным концом массива 778 формирования ультразвукового изображения. Такая конструкция может уменьшать силы (например, действовать, как разгрузчик натяжения), передаваемые на место соединения между гибкой платой 782 и массивом 778 формирования ультразвукового изображения, из-за шарнирного поворота массива 778 формирования ультразвукового изображения. Такая конструкция также устраняет необходимость пропускать гибкую плату 782 через или вокруг держателя 774 для обеспечения соединения с массивом 778 формирования ультразвукового изображения на проксимальном конце массива 778 формирования ультразвукового изображения. В свою очередь, это обеспечивает возможность использования единого шарнирного участка 776 (в отличие от двойных шарнирных участков 86а, 86b катетера 54 по фиг.5В), такого, как показаны на фиг.49А и 49В. Кроме того, разгрузчик натяжения массива 778 формирования ультразвукового изображения для соединения гибкой платы 782, предусмотренной с помощью конфигурации, показанной на фиг.49А и 49В, может быть предпочтительным при обеспечении возможности использования гибкой платы 782 также для выполнения функции тяги (аналогичной тяге 78 по фиг.5В). В альтернативном варианте осуществления катетер 768 по фиг.49А и 49В может включать в себя тягу, аналогичную тяге 78 фиг.5В.
На фиг.49А показана область, в пределах которой происходит 786 изгиб. Область, в которой происходит 786 изгиб, представляет собой область вдоль катетера 768, где шарнирный участок 776 изгибается с образованием изгиба, показанного на фиг.49В. Область, в которой происходит 786 изгиб, короче, чем диаметр внешнего трубчатого корпуса 770.
На фиг.50 представлен вариант осуществления элемента 788 электрического соединения. Элемент 788 электрического соединения может, например, использоваться вместо сборки, показанной на фиг.5F в катетере 50, показанном на фиг.5А-5Е. Кроме того, элемент 788 электрического соединения или его особенности можно использовать в любом соответствующем варианте осуществления изобретения, раскрытом здесь. Элемент 788 электрического соединения включает в себя спирально расположенный участок 790, который может быть расположен внутри трубчатого корпуса катетера (например, аналогично элементу 104 электрического соединения по фиг.5F). Спирально расположенный участок 790 элемента 788 электрического соединения может включать в себя множество отдельных проводников, соединенных в месте расположения в компоновке рядом друг с другом. Элемент 788 электрического соединения может включать в себя несоединенный участок 792, где отдельные проводники элемента 788 электрического соединения не связаны вместе. Отдельные проводники несвязанного участка 792 каждый может быть индивидуально изолирован, что способствует предотвращению короткого замыкания между проводниками. Несоединенный участок 792 может обеспечивать участок элемента 788 электрического соединения, который является относительно более гибким, чем спирально расположенный участок 790. В этом отношении, несоединенный участок 792 может иметь достаточную гибкость для обеспечения электрического соединения между элементами, которые соединены шарнирно относительно друг друга. Поэтому, в соответствующих вариантах осуществления изобретения, описанных здесь, несоединенный участок 792 элемента 788 электрического соединения может заменять гибкую плату или другие гибкие электрические соединения.
Элемент 788 электрического соединения может дополнительно включать в себя участок 794 соединения массива, выполненный с возможностью электрического соединения массива формирования ультразвукового изображения (не показан на фиг.50). Участок 794 соединения массива может, например, включать в себя множество отдельных проводников, соединенных вместе в такой же компоновке рядом друг с другом, что и участок, расположенный по спирали. При этом, элемент 788 электрического соединения может быть выполнен с возможностью удаления структуры соединения между проводниками в несоединенном участке 792, оставляя соединение нетронутым в спирально расположенном участке 790 и участке 794 соединения массива. Проводники участка 794 соединения массива могут быть избирательно открыты таким образом, что они могут быть электрически соединены с соответствующими элементами массива формирования ультразвукового изображения. В другом варианте осуществления изобретения участок 794 соединения массива может быть соединен с промежуточным элементом, который может быть выполнен с возможностью обеспечения электрических соединений от отдельных проводников участка 794 соединения массива с соответствующими элементам массива формирования ультразвукового изображения.
Альтернативный вариант осуществления элемента 788 электрического соединения может быть выполнен без участка 794 соединения массива. В такой конфигурации могут использоваться "неподсоединенные выводы", где каждый проводник несоединенного участка 792 остается электрически соединенным со спирально расположенным участком 790 на одном конце и несоединенным на другом конце. Такие несоединенные, назакрепленные соединения могут затем, например, быть индивидуально соединены с соответствующим проводниками на массиве формирования ультразвукового изображения.
В вариантах осуществления изобретения, описанных здесь, в которых подвижный удлиненный элемент (например, вытяжной провод) используется для обеспечения отклонения массива формирования ультразвукового изображения, удлиненный элемент, в общем, направляют вдоль одной стороны корпуса катетера. В вариации таких вариантов осуществления изобретения удлиненный элемент может быть выполнен таким образом, что его первый участок расположен вдоль первой стороны корпуса катетера, и второй участок удлиненного элемента расположен вдоль второй стороны корпуса катетера. Например, на фиг.51А и 51В показан вариант осуществления изобретения по фиг.6В с первым участком 798 корпуса 136 вытяжного провода и вытяжным проводом 130, расположенными вдоль первой стороны корпуса 118 катетера, и вторым участком 800 корпуса вытяжного провода и вытяжным проводом, расположенными вдоль второй стороны корпуса 118 катетера. Другие компоненты по фиг.6В были описаны выше и не будут описаны дополнительно. Такие конфигурации могут способствовать снижению уровня несимметричных сил, прикладываемых к корпусу 118 катетера (например, во время размещения катетера в теле и/или во время операции), благодаря использованию корпуса 136 вытяжного провода, и вытяжного провода 130. Это может привести к повышенной способности поддерживать стабильность катетера во время разворачивания кончика.
На фиг.51А показан вариант осуществления изобретения, в котором первый участок 798 корпуса 136 вытяжного провода и вытяжной провод 130 соединены со вторым участком 800 корпуса 136 вытяжного провода, и вытяжной провод 130 может представлять собой переходной участок 802. Переходной участок 802 представляет собой участок корпуса 136 вытяжного провода и вытяжного провода 130, который намотан спирально вокруг корпуса 118 катетера. На фиг.52А показан вариант осуществления, в котором первый участок 798 корпуса 136 вытяжного провода и вытяжной провод 130 соединены со вторым участком 800 корпуса 136 вытяжного провода и вторым вытяжным проводом 806 через соединение 804. Соединение 804 может быть расположено цилиндрически вокруг участка длины корпуса катетера 118 и во время работы может скользить вдоль этого участка длины корпуса катетера 118, в соответствии с силами, приложенными к вытяжным проводам 130, 806. Второй вытяжной провод 806 может быть расположен на второй стороне корпуса 118 катетера и закреплен на соединении 804. Вытяжной провод также закреплен на соединении 804. Когда оператор тянет за второй вытяжной провод 806 проксимально, соединение 804 смещается проксимально, и вытяжной провод 130, ввиду его соединения с соединением 804, также вытягивается проксимально. Обе представленные конфигурации вытяжного провода на фиг.51А и 51В также могут работать, как проталкивающие провода.
На фиг.52А и 52В показан участок корпуса катетера, который включает в себя подложку 850 и спирально намотанный элемент 852 электрического соединения. Подложка 850 и элемент 852 электрического соединения могут быть встроены в любой соответствующий вариант осуществления изобретения, раскрытый здесь, включая варианты осуществления изобретения, где внутренний трубчатый корпус содержит элемент 852 электрического соединения, и варианты осуществления изобретения, в которых внешний трубчатый корпус содержит элемент 852 электрического соединения. Подложка 850 представляет собой слой, вокруг которого намотан элемент 852 электрического соединения. Например, подложка 850 может представлять собой внутренний связующий слой 102 в одном варианте осуществления изобретения по фиг.5Е.
Возвращаясь к фиг.52А, элемент 852 электрического соединения может иметь ширину (х), и подложка может иметь диаметр (D). Элемент 852 электрического соединения может быть обмотан вокруг подложки 850 таким образом, что присутствует зазор (g) между последовательными витками элемента 852 электрического соединения. Элемент 852 электрического соединения может быть намотан под углом (θ), в результате чего, получается длина (L) каждого витка элемента 852 электрического соединения вдоль продольной оси катетера. В соответствии с этим, длина (L) соотносится с углом (θ) следующим образом:
L=x/sin(θ) Уравнение 1
Кроме того, угол (θ) соотносится с (D), (L) и (g) следующим образом:
tan(θ)=(π(D))/(z(L+g)) Уравнение 2
Где (z) представляет собой количество отдельных элементов 852 электрического соединения, намотанных вокруг подложки 850 (в катетере по фиг.52А и 52В, (z)=1). Для конкретного элемента 852 электрического соединения значение (х) известно. Кроме того, для конкретной подложки 850, будет известно (D). И для конкретного катетера могут быть известны (z) и (g). В соответствии с этим, Уравнения 1 и 2 могут иметь две неизвестных переменных (θ) и (L). Поэтому, для заданных значений (D), (z), (g) и (х), (θ) и (L) могут быть определены. В примерном катетере, где диаметр (Z)) подложки составлял 3,3 мм, количество (z) элементов 852 электрического соединения равно 1, требуемый зазор (g) составлял 0,76 мм, и ширина (х) элемента 852 электрического соединения составляла 4,8 мм, (в) определили, как равное 58°, и (JL) определили равным 5,64 мм.
Возвращаясь к фиг.52В, для данного катетера, может быть определен минимальный требуемый радиус (К) изгиба. Для обеспечения того, чтобы последующие витки элемента 852 электрического соединения не перекрывали друг друга, когда катетер изгибают до минимального требуемого радиуса (К) изгиба, зазор (g) должен быть равен или должен превышать минимальный зазор (gm). Минимальный зазор (gm) представляет собой размер зазора, где последующие витки элемента 852 электрического соединения входят в контакт друг с другом, когда катетер изгибают до минимального требуемого радиуса (К) изгиба, как представлено на фиг.52В. Минимальный требуемый радиус (К) изгиба соотносится с длиной (Z) и минимальным зазором (gm) следующим образом:
(L+gm)/L=R/(R-(D/2)) Уравнение 3
Подставляя значения для (L) (5,64 мм) и (D) (3,3 мм) в Уравнение 3 и, используя минимальный требуемый радиус (R) изгиба 25,4 мм, получим минимальный зазор (gm) 0,38 мм. В соответствии с этим, зазор (g) 0,76 мм использовавшийся выше в Уравнениях 1 и 2, превышает минимальный зазор (gm) 0,38 мм для радиуса (R) изгиба 25,4 мм из Уравнения 3. Поэтому, зазор (g) 0,76 мм не должен привести к контакту друг с другом последовательных витков элемента 852 электрического соединения, когда катетер изгибают до радиуса (R) изгиба 25,4 мм.
На фиг.53-56В показаны варианты осуществления узлов зонда катетера, которые включают в себя кончики катетера, массивы преобразователей и соответствующие компоненты для возвратно-качательного поворота массивов преобразователей с кончиками катетера. Хотя это не показано, кончики катетера могут отклоняться и в представленных вариантах осуществления изобретения могут дополнительно включать в себя шарниры и соответствующие компоненты для избирательного отклонения кончиков катетера (например, относительно продольной оси катетера на дистальных концах осей катетера). Кроме того, варианты осуществления изобретения, показанные на фиг.53-56В, могут дополнительно включать в себя каналы.
На фиг.53 показан вид с частичным разрезом узла 5300 ультразвукового зонда катетера. Узел 5300 зонда катетера включает в себя кончик 5301 катетера, закрепленный на оси 5302 катетера. Узел 5300 зонда катетера может, в общем, иметь размеры и форму, которые соответствуют вводу в тело пациента с последующим формированием изображений внутреннего участка тела пациента. Узел 5300 зонда катетера, в общем, может включать в себя дистальный конец 5303 и проксимальный конец (не показан). Проксимальный конец узла 5300 зонда катетера может включать в себя устройство управления, которое во время работы пользователь (например, клинический врач) удерживает в руке. Пользователь может манипулировать движениями узла 5300 зонда катетера, манипулируя устройством управления. Во время съемки изображений дистальный конец 5303 узла 5300 зонда катетера может быть расположен внутри тела пациента, в то время как устройство управления и проксимальный конец узла зонда катетера остаются снаружи от тела пациента.
Кончик 5301 катетера может быть расположен между дистальным концом 5303 и проксимальным концом 5304 кончика 5301 катетера. Кончик 5301 катетера может включать в себя корпус 5305 кончика катетера. Корпус 5305 кончика катетера может быть относительно жестким (по сравнению со стержнем 5302 катетера) элементом, в котором расположен двигатель 5306 и массив 5307 преобразователей, оба из которых описаны ниже. В качестве альтернативы, как отмечено ниже, участок корпуса 5305 кончика катетера может быть управляемым и/или гибким. Кончик 5301 катетера может включать в себя центральную ось 5308.
Стержень 5302 катетера во время работы может направляться в тело пациента. Для стержня 5302 катетера может использоваться любой соответствующий способ направления, такой как, но без ограничений, набор проводов управления и соответствующие средства управления. При этом стержень 5302 катетера может быть управляемым. Стержень 5302 катетера может быть гибким и, поэтому, во время работы, может направляться через структуру тела пациента и может следовать контурам структуры тела пациента, такой, как контуры системы сосудистой системы. Стержень 5302 катетера может включать в себя внешний слой 5309 и внутренний слой 5310. Внешний слой 5309 может быть выполнен из одиночного слоя материала, или он может быть выполнен из множества отдельных слоев материалов. Аналогично, внутренний слой 5310 может быть выполнен из одиночного слоя материала, или он может быть выполнен из множества отдельных слоев материалов. Внутренний слой 5310 включает в себя дистальный участок 5338, который расположен на дистальном конце внутреннего слоя 5315. Дистальный участок 5338 может представлять собой интегральную часть внутреннего слоя 5310. В качестве альтернативы, дистальный участок 5338 может быть отдельным от остального внутреннего слоя 5310 перед сборкой узла 5300 зонда катетера и во время сборки, дистальный участок 5338 может быть взаимно соединен с оставшейся частью внутреннего слоя 5310. Внутренний слой 5310, внешний слой 5309 или оба могут быть выполнены и/или могут быть усилены, с возможностью уменьшения нежелательного вращения катетера, из-за возвратно-качательного движения, описанного здесь, и/или так, чтобы, в общем, увеличить прочность узла зонда катетера. Такое усиление может принимать форму оплетенного элемента, расположенного на или рядом с внутренним слоем 5310 и/или внешним слоем 5309.
Элемент 5311 электрического соединения может быть расположен внутри узла 5300 зонда катетера. Элемент 5311 электрического соединения может состоять из первого участка 5312 и второго участка 5313. Второй участок 5313 элемента 5311 электрического соединения представлен в поперечном сечении на фиг.53. Первый участок 5312 элемента 5311 электрического соединения не показан в поперечном сечении на фиг.53. Второй участок 5313 элемента 5311 электрического соединения может быть расположен между внешним слоем 5309 и внутренним слоем 5310 вдоль стержня 5302 катетера. Как показано, второй участок 5313 элемента 5311 электрического соединения может быть спирально расположен вокруг внутреннего слоя 5310. Второй участок 5313 может быть расположен в области 5314 между внутренним слоем 5310 и внешним слоем 5309. В другом варианте осуществления изобретения второй участок 5313 может быть обернут вокруг и примотан к внутреннему сердечнику (не показан), который может быть расположен внутри внутреннего участка 5319 стержня 5302 катетера. Второй участок 5313, примотанный к внутреннему сердечнику, может быть зафиксирован относительно внутреннего слоя 5310, или он может не быть закрепленным на внутреннем слое 5310.
Второй участок 5313, примотанный к внутреннему сердечнику, может улучшать устойчивость к образованию петли и отклик на скручивание узла 5300 зонда катетера. В таком варианте осуществления изобретения второй участок 5313 может быть примотан к внутреннему сердечнику, и первый участок 5312 может оставаться свободным и не закрепленным на внутреннем сердечнике и на корпусе 5305 кончика катетера.
Дистальный конец 5315 внутреннего слоя 5310 может быть герметизирован вдоль его внешнего контура, используя уплотнительный материал 5316. Уплотнительный материал 5316 может быть расположен, как представлено, между внешним контуром дистального конца 5315 внутреннего слоя 5310 и внутренней поверхностью корпуса 5305 кончика катетера. В другом варианте осуществления изобретения внешний слой 5309 стержня 5302 катетера может продолжаться до дистального конца 5315 внутреннего слоя 5310 или за его пределы, и в таком варианте осуществления изобретения уплотнительный материал 5316 может быть расположен между внешним периметром дистального конца 5315 внутреннего слоя 5310 и внутренней поверхностью внешнего слоя 5309. В качестве альтернативы, область 5314 между внутренним слоем 5310 и внешним слоем 5309 может, в дополнение к содержанию расположенного спирально второго участка 5313 элемента 5311 электрического соединения, быть частично или полностью заполненной уплотнительным материалом 5316. Уплотнительный материал 5316 может включать в себя любой соответствующий материал, такой как, например, термоусадочный или термопластичный материал, или расширенный политетрафторэтилен (ePTFE). Второй участок 5313 элемента 5311 электрического соединения может продолжаться вдоль всей длины стержня 5302 катетера от проксимального конца 5304 кончика 5301 катетера до системы формирования изображений (не показана). В этом отношении, элемент 5311 электрического соединения может функционально соединять кончик 5301 катетера с системой формирования изображений.
Замкнутый объем 5317 может быть определен корпусом 5305 кончика катетера, концевым участком внутреннего слоя 5310 стержня катетера 5302 и конечной стенкой 5318 замкнутого объема. Конечная стенка 5318 замкнутого объема может быть расположена с возможностью ее герметизации в пределах внутреннего слоя 5310, рядом с дистальным концом 5315 внутреннего слоя 5310. Замкнутый объем 5317 также может быть герметизирован уплотнительным материалом 5316, как описано выше.
Замкнутый объем 5317 может быть заполнен жидкостью и герметизирован. Жидкость может представлять собой биосовместимое масло, выбранное, помимо прочего, с учетом его акустических свойств. Например, жидкость может быть выбрана так, чтобы она соответствовала или приближалась к акустическому импедансу и/или акустической скорости жидкости в пределах области тела, в котором формируют изображение. Замкнутый объем 5317 может быть герметизирован таким образом, чтобы, по существу, не возникало протечек жидкости внутри замкнутого объема 5317 за пределы замкнутого объема 5317. Кроме того, замкнутый объем 5317 может быть герметизирован так, чтобы, по существу, предотвращать попадание газа (например, воздуха) в замкнутый объем 5317.
Узел 5300 зонда катетера может быть заполнен с использованием любого соответствующего способа. Во время заполнения узел 5300 зонда катетера и жидкость могут иметь известные температуры, с тем, чтобы предпочтительно управлять объемом введенной жидкости и размером замкнутого объема 5317. В одном примерном способе заполнения корпус 5305 кончика катетера может включать в себя герметизируемый отверстие 5336. Газы в пределах замкнутого объема могут быть откачаны с использованием вакуума из замкнутого объема 5317 через герметизируемое отверстие 5336. Затем жидкость может быть введена через герметизируемое отверстие 5336, до тех пор, пока требуемое количество жидкости не будет находиться внутри замкнутого объема 5317. Герметизируемое отверстие 5336 может быть затем герметично закрыто. В другом примере узел 5300 зонда катетера может включать в себя герметизируемое отверстие 5336 на дистальном конце 5303 и герметизируемое отверстие 5337 на проксимальном конце 5304. Герметизируемое отверстие 5337 может быть расположено вдоль проксимальной конечной стенки 5318 замкнутого объема. Одно из отверстий 5337, 5338 может использоваться, как впускное отверстие для жидкости, в то время как другое отверстие 5337, 5338 может использоваться, как выпускное отверстие для вытесняемых газов. При этом, по мере того, как жидкость поступает через впускное отверстие, газы могут выходить (или их можно откачивать, используя вакуум) из замкнутого объема 5317 через выпускное отверстие. Когда желаемый объем жидкости будет находиться внутри замкнутого объема 5317, отверстия 5337, 5338 могут быть герметизированы. В описанных выше способах заполнения измеренное количество жидкости может быть удалено из замкнутого объема 5317 после того, как он будет полностью заполнен. Количество удаленной жидкости может соответствовать требуемой степени расширения элемента 5320 сильфона (описанного ниже).
Кончик 5301 катетера может включать в себя обратный клапан (не показан), который может во время работы обеспечивать протекание жидкости из замкнутого объема 5317, если разность давлений между замкнутым объемом 5317 и окружающей средой превысит заданный уровень. Обратный клапан может быть выполнен в форме клапана - прорези, расположенного вдоль корпуса 5305 кончика катетера. При этом обратный клапан может во время работы сбрасывать избыточное давление, которое может формироваться во время процесса заполнения, уменьшая, таким образом, вероятность разрыва узла 5300 зонда катетера во время процедуры заполнения. Как только замкнутый объем будет заполнен, обратный клапан может быть постоянно герметизирован. Например, зажим может быть размещен поверх обратного клапана для герметизации обратного клапана.
Внутренний участок 5319 стержня 5302 катетера может быть отделен с возможностью герметизации от замкнутого объема 5317. Внутренний участок 5319 стержня 5302 катетера может быть расположен в пределах внутреннего объема внутреннего слоя 5310. Внутренний участок 5319 стержня 5302 катетера может содержать воздух и может вентилироваться таким образом, чтобы давление внутри внутреннего участка 5319 стержня 5302 катетера было равно или было бы близким к локальному атмосферному давлению, в котором находится узел 5300 зонда катетера. Такая вентиляция может быть выполнена через специальный механизм вентиляции (такой, как отверстие в стержне 5302 катетера, в точке, находящейся за пределами тела пациента) между внутренним участком 5319 стержня 5302 катетера и локальной атмосферой.
Следует понимать, что если бы замкнутый объем 5317 был полностью окружен, по существу, жесткими элементами и заполнен жидкостью, то вариации температуры узла 5300 зонда катетера могли бы привести к нежелательным изменениям давления внутри замкнутого объема 5317. Например, в такой конфигурации, если бы узел 5300 зонда катетера был подвергнут повышенным температурам, давление жидкости внутри замкнутого объема 5317 могло бы увеличиться; и возможно привести к утечке некоторого количества жидкости из замкнутого объема 5317. Аналогично, например, если узел 5300 зонда катетера подвергнуть пониженным температурам, давление жидкости внутри замкнутого объема 5317 могло бы уменьшиться, возможно вызывая протечку некоторого количества воздуха или другой жидкости в замкнутый объем 5317. В соответствии с этим, было бы предпочтительно предотвратить или уменьшить вариации давления внутри замкнутого объема 5317 относительно окружающих условий, в которых размещен узел 5300 зонда катетера.
Для того чтобы способствовать выравниванию давления между жидкостью внутри замкнутого объема 5317 и окружающими условиями, в узел 5300 зонда катетера может быть встроен элемент 5320 сильфона. Элемент 5320 сильфона может, в общем, представлять собой гибкий элемент, который может сжиматься и расширяться в соответствии с изменениями объема жидкости внутри замкнутого объема 5317, таким, как изменения объема в результате изменений температуры. Элемент 5320 сильфона может быть выполнен с возможностью определения внутреннего объема и имеет одно отверстие.
Одно отверстие может представлять собой открытый конец 5321 элемента 5320 сильфона таким образом, что открытый конец 5321 может быть расположен вдоль внешней стенки 5318 и ориентирован таким образом, что внутренний объем элемента 5320 сильфона находится в связи по жидкости с внутренним участком 5319 стержня 5302 катетера. Оставшийся участок элемента 5320 сильфона может быть расположен внутри замкнутого объема 5317 и может включать в себя участок закрытого конца.
Исходная конфигурация элемента 5320 сильфона может быть выбрана таким образом, чтобы элемент 5320 сильфона во время работы мог компенсировать (например, выравнивать давление между замкнутым объемом 5317 и внутренним участком 5319 стержня 5302 катетера) вариации температуры в пределах рабочего диапазона температур узла 5300 зонда катетера. Кроме того, элемент 5320 сильфона может быть выполнен с возможностью компенсации вариаций температуры больше, чем рабочий диапазон температур для узла 5300 зонда катетера, таких как вариации температуры, которые можно видеть во время хранения и/или транспортировки узла 5300 зонда катетера. Элемент 5320 сильфона может быть изогнут или сформован по-другому, чтобы огибать другие внутренние компоненты внутри замкнутого объема 5317.
При максимальной температуре жидкости, на компенсацию которой рассчитан элемент 5320 сильфона, элемент 5320 сильфона может быть полностью сжат или может быть близок к полному сжатию. При этом расширение жидкости внутри замкнутого объема 5317 может не приводить к повышению давления внутри замкнутого объема 5317, поскольку элемент 5320 сильфона может компенсировать расширение жидкости. При минимальной температуре жидкости, на компенсацию которой рассчитан элемент 5320 сильфона, элемент 5320 сильфона может быть расширен до значения, близкого к его предельному расширению. При этом объемное сжатие жидкости в замкнутом объеме 5317 может не приводить к понижению давления в замкнутом объеме 5317, поскольку расширение элемента 5320 сильфона может компенсировать сжатие жидкости. Кроме того, благодаря установке элемента 5320 в замкнутом объеме 5317, он будет защищен от движения стержня 5302 катетера.
Хотя элемент 5320 сильфона показан как имеющий поперечный размер, существенно меньший, чем поперечный размер внутреннего слоя стержня 5310 катетера, элемент 5320 сильфона может быть существенно больше. При этом элемент 5320 сильфона может иметь поперечный размер, приближающийся к внутреннему слою стержня 5310 катетера. Следует понимать, что такой элемент сильфона может быть относительно менее гибким, чем элемент 5320 сильфона, показанный на фиг.53, но может быть аналогично способным принимать изменения объема жидкости, благодаря своему относительно большому размеру. Такой относительно больший элемент сильфона может быть построен аналогично внутреннему 5310 и/или внешнему 5309 слоям стержня катетера.
Совместно с, или вместо, элемента 5320 сильфона, участок боковой стенки корпуса 5305 кончика катетера (например, участок конечной стенки 5339 корпуса 5305 кончика катетера и/или участок боковой стенки корпуса 5305 кончика катетера, проксимальный первому участку элемента 5312 электрического соединения) может быть выполнен таким образом, чтобы этот участок выполнял функцию, аналогичную функции элемента 5320 сильфона, описанную выше. Например, участок может быть гибким и может отклоняться внутрь, если жидкость и узел 5300 зонда катетера становится более холодным, и наружу, если жидкость и узел 5300 зонда катетера становятся более теплыми, принимая, таким образом, изменения объема жидкости, связанные с температурой.
В одном варианте осуществления изобретения элемент 5320 сильфона или, по меньшей мере, его дистальный участок, может быть упруго деформируемым. В частности, элемент 5320 сильфона во время работы может растягиваться или упруго расширяться за пределы нейтрального состояния (например, состояние, где отсутствует разность давлений между внутренней частью элемента 5320 сильфона и внешней частью элемента 5320 сильфона), как реакция на разность давлений между замкнутым объемом 5317 и внутренним объемом катетера 5319, где давление внутри катетера 5319 больше, чем давление в замкнутом объеме 5317. Такое растяжение или упругое расширение может воспринимать большие перепады давлений, которые могут возникать в элементе 5320 сильфона с аналогичными размерами, который, по существу, неспособен растягиваться или упруго расширяться. Кроме того, такой растягиваемый или упруго расширяемый элемент 5320 сильфона может привести к тому, что узел 5300 зонда катетера будет не способен поддерживать вариации температуры, большие, чем рабочий диапазон температур узла 5300 зонда катетера, такие как изменения температуры, которые могут возникать во время хранения узла 5300 зонда катетера и/или при его транспортировке. Такой растяжимый или упруго расширяемый элемент 5320 сильфона может быть выполнен с возможностью противостоять большему диапазону изменений объемов жидкости (например, узел 5300 зонда катетера с растяжимым или упруго расширяемым элементом 5320 сильфона может быть более устойчивым к более широкому диапазону окружающей температуры, с расширением, в частности, диапазона низких температур, при котором жидкость обычно сжимается в большей степени, чем корпус 5305 кончика катетера). Такой растяжимый или упруго расширяемый элемент 5320 сильфона может быть выполнен на основе силикона и может быть изготовлен с использованием, например, процесса формования с передачей жидкости.
В одном варианте осуществления изобретения эластичный, упруго деформируемый элемент 5320 сильфона может быть предусмотрен таким образом, что в нейтральном состоянии элемент 5320 сильфона автоматически принимает свою исходную конфигурацию. Такая исходная конфигурация может соответствовать предварительно сформованной конфигурации (например, выпуклой конфигурации в форме пипетки), за исключением мест, где он пространственно ограничен другими жесткими компонентами (например, улавливатель 5322 пузырьков и/или проксимальная конечная стенка 5318 замкнутого объема). В свою очередь, элемент 5320 сильфона может сжиматься и автоматически расширяться и вытягиваться относительно такой исходной конфигурации в соответствии с изменениями давления.
Узел зонда катетера может включать в себя улавливатель 5322 пузырьков, показанный в поперечном сечении на фиг.53. Улавливатель 5322 пузырьков может быть соединен с дистальным концом 5315 внутреннего слоя 5310 стержня 5302 катетера. Улавливатель 5322 пузырьков может быть взаимно соединен с внутренним слоем 5310 с помощью любого соответствующего средства. Например, улавливатель 5322 пузырьков может быть соединен с внутренним слоем 5310, используя клей. Например, улавливатель 5322 пузырьков 322 может быть установлен с прессовой посадкой на внутренний слой 5310.
Улавливатель 5322 пузырьков может включать в себя выемку, сформированную вогнутой поверхностью 5323, обращенной дистально. Кроме того, дистальный участок замкнутого объема 5317 определен, как участок замкнутого объема 5317, дистальный для улавливателя 5322 пузырьков. Соответственно, проксимальный участок замкнутого объема 5317 определен, как участок замкнутого объема 5317, проксимальный для улавливателя 5322 пузырьков. Улавливатель 5322 пузырьков может включать в себя отверстие 5324, которое взаимно соединяет по жидкости дистальный участок с проксимальным участком. Отверстие 5324 может быть расположено на или рядом с наиболее проксимальным участком обращенной дистально вогнутой поверхностью 5323.
Во время рабочего цикла узла 5300 зонда катетера пузырьки могут формироваться внутри и могут поступать в замкнутый объем 5317. Улавливатель 5322 пузырьков во время работы может улавливать эти пузырьки на проксимальном участке замкнутого объема 5317. Например, во время нормальной работы узла 5300 зонда катетера, узел зонда катетера может быть расположен в различных положениях, включая в себя положения, где дистальный конец 5303 узла 5300 зонда катетера обращен вниз. Когда узел 5300 зонда катетера находится в положении, когда он обращен вниз, пузырьки на дистальном участке могут проявлять тенденцию естественного всплытия вверх. Входя в контакт с вогнутой поверхностью 5323, пузырьки могут продолжить свой подъем до тех пор, пока они не достигнут отверстия 5324. Пузырьки затем могут продвигаться через отверстие 5324, двигаясь от дистального участка к проксимальному участку. Как только пузырьки попадут в проксимальный участок, и узел 5300 зонда катетера будет размещен в положении, в котором дистальный участок обращен вверх, улавливатель 5322 пузырьков проявляет тенденцию направлять любые поднимающиеся пузырьки в проксимальный участок, отводя их от отверстия 5324. Следуя наклону проксимальной поверхности улавливателя 5322 пузырьков, пузырьки проявляют тенденцию мигрировать в область 5325 улавливания и могут быть захвачены в ней.
Улавливатель 5322 пузырьков является предпочтительным, поскольку пузырьки, присутствующие в нем, между массивом 5307 преобразователей и акустическим окном 5326 корпуса 5305 могут формировать нежелательные искусственные искажения изображения, когда узел 5300 зонда катетера используют для генерирования изображения объема 5327 изображения. Это связано с разными акустическими свойствами пузырьков воздуха по сравнению с акустическими свойствами жидкости, находящейся в замкнутом объеме 5317. Удерживая пузырьки, которые могут сформироваться во время срока службы узла 5300 зонда катетера на расстоянии от массива 5307 преобразователей, срок службы узла 5300 зонда катетера может быть увеличен. При этом пузырьки, которые могут сформироваться внутри замкнутого объема 5317 или могут попасть в замкнутый объем 5317, не будут приводить к ухудшению изображений, формируемых с использованием узла 5300 зонда катетера.
Перед вставкой узла 5300 зонда катетера в тело пациента, пользователь (например, врач или техник) может манипулировать узлом 5300 зонда катетера таким образом, чтобы способствовать перемещению любых пузырьков, которые могут присутствовать в замкнутом объеме 5317, в объем, проксимальный улавливателю 5322 пузырьков. Например, пользователь может разместить узел 5300 зонда катетера в таком положении, в котором дистальный конец 5303 обращен вниз, чтобы обеспечить возможность для пузырьков, находящихся в замкнутом объеме 5317, перемещаться вверх в объем, проксимальный улавливателю пузырьков 5322, захватывая, таким образом, пузырьки. В другом примере пользователь может захватывать узел 5300 зонда катетера в точке, проксимальной кончику 5301 катетера и качать кончиком 5301 катетера для придания центробежной силы для жидкости, находящейся в замкнутом объеме 5317, обеспечивая, таким образом, перемещение жидкости в направлении дистального конца 5303 и перемещения каких-либо пузырьков, находящихся в жидкости, в направлении к проксимальному концу 5304. Кроме того, узел 5300 зонда катетера может быть упакован таким образом, что дистальный конец 5303 будет направлен вниз так, что какие-либо пузырьки, находящиеся в замкнутом объеме 5317, могут мигрировать к проксимальному концу 5304 кончика 5301 катетера, в то время как узел 5300 зонда катетера находится в положении хранения или его транспортируют перед использованием.
В другом примере узел 5300 зонда катетера может быть упакован, доставлен и может храниться в незаполненном состоянии, и перед использованием пользователь может заполнять узел 5300 зонда катетера жидкостью. Например, пользователь может вставить иглу шприца в герметизируемое отверстие 5336 и ввести жидкость (например, солевой раствор или солевой раствор, не содержащий пузырьков) в узел 5300 зонда катетера для заполнения узла 5300 зонда катетера. Пользователь может затем манипулировать узлом 5300 зонда катетера любым из способов, описанных выше, с тем, чтобы способствовать перемещению каких-либо пузырьков, которые могут присутствовать внутри замкнутого объема 5317, в объем, проксимальный улавливателю пузырьков 5322. Такие системы упаковки, поставки, хранения и заполнения (как предварительно заполненные, так и заполняемые пользователем) могут использоваться с использованием соответствующих компоновок, заполненных жидкостью, описанных здесь.
Фильтр может быть расположен в отверстии 5324. Фильтр может быть выполнен таким образом, чтобы газы (например, воздух) могли проходить через фильтр, в то время как жидкость (например, масло, солевой раствор), не могли бы проходить через фильтр. Такая конфигурация может позволить пропускать пузырьки воздуха из дистального конца замкнутого объема 5317 (участок замкнутого объема, находящийся справа от улавливателя пузырьков 5322 на фиг.53), через фильтр, расположенный в отверстии 5324, и в проксимальный конец замкнутого объема 5317 (участок замкнутого объема слева от улавливателя пузырьков 5322 на фиг.53), препятствуя при этом протеканию жидкости через фильтр, расположенный в отверстии 5324. Фильтр может включать в себя ePTFE.
Узел 5300 зонда катетера включает в себя массив 5307 преобразователей и подкладку 5328 массива. Массив 5307 преобразователей может содержать массив, состоящий из множества отдельных элементов преобразователей, каждый из которых может быть электрически соединен с устройством формирования ультразвукового изображения через соединение сигнала и соединение заземления. Массив 5307 преобразователей может представлять собой одномерный массив, который включает в себя один ряд отдельных элементов датчика преобразователей. Массив 5307 преобразователей может быть двумерным массивом, который включает в себя отдельные элементы преобразователей, расположенные, например, во множестве столбцов и множестве рядов. Соединение с землей всего массива 5307 преобразователей может быть объединено и может быть электрически соединено с устройством формирования ультразвукового изображения через одно соединение с землей. Массив 5307 преобразователей может представлять собой механически активный слой, который во время работы преобразует электроэнергию в механическую (например, акустическую) энергию и/или преобразует механическую энергию в электроэнергию. Например, массив 5307 преобразователей может содержать пьезоэлектрические элементы. Например, массив 5307 преобразователей во время работы может преобразовывать электрические сигналы из устройства формирования ультразвукового изображения в ультразвуковую акустическую энергию. Кроме того, массив 5307 преобразователей может во время работы преобразовывать принимаемую ультразвуковую акустическую энергию в электрические сигналы.
Массив преобразователей может включать в себя цилиндрическое ограждение, расположенное вокруг массива 5307, и подкладку 5328 массива. Цилиндрическое ограждение может возвратно-качательно поворачиваться вдоль массива 5307 и подкладки 5328 массива. Цилиндрическое ограждение может быть выполнено из такого материала, который имеет акустическую скорость, аналогичную крови или другой жидкости организма, в которую должен быть вставлен узел 5300 зонда катетера. Цилиндрическое ограждение может иметь такие размеры, что существует зазор между внешним диаметром цилиндрического ограждения и внутренним диаметром корпуса 5305 и акустическим окном 5326. Зазор может иметь такие размеры, что капиллярные силы втягивают жидкость в зазор, и удерживают эту жидкость внутри зазора. Жидкость может представлять собой упомянутое выше масло, солевой раствор, кровь (например, в случае, когда замкнутый объем 5317 открыт для окружающей среды), или любую другую соответствующую жидкость. В одном варианте осуществления изобретения жидкость может быть помещена в замкнутый объем 5317 во время изготовления узла 5300 зонда катетера. В одном варианте жидкость может быть добавлена во время использования узла 5300 зонда катетера. В другом варианте осуществления изобретения не растворимое в воде, обладающее большой вязкостью связующее вещество может использоваться вместо описанной выше жидкости. Связующее вещество может быть расположено между внешним диаметром цилиндрического ограждения и внутренним диаметром корпуса 5305. Связующее вещество может быть выбрано таким образом, чтобы утечка связующего вещества в тело пациента не была бы неприемлемо вредной. Связующее вещество может представлять собой смазку, такую как силиконовая смазка, Krytox™ (поставляемая Е.I. Du Pont De Nemours and Company, Wilmington, DE, U.S.A.), или любое другое соответствующее, обладающее большой вязкостью, не растворимое в воде связующее вещество.
Для генерирования ультразвукового изображения, устройство формирования ультразвукового изображения может передавать электрические сигналы в массив 5307 преобразователей, который, в свою очередь, может преобразовывать электроэнергию в ультразвуковую акустическую энергию, которая может излучаться в направлении объема 5327 изображения. Структура в объеме 5327 изображения может отражать часть акустической энергии назад в направлении массива 5307 преобразователей. Отраженная акустическая энергия может быть преобразована в электрические сигналы с помощью массива 5307 преобразователей. Электрические сигналы могут быть переданы в устройство формирования ультразвукового изображения, где они могут быть обработаны, и может быть сгенерировано изображение объема 5327 изображения.
Обычно массив 5307 преобразователей во время работы передает ультразвуковую энергию через акустическое окно 5326 корпуса 5305 кончика катетера. В узле 5300 зонда катетера, акустическое окно 5326 формирует часть корпуса 5305 кончика катетера вдоль участка внешней окружности корпуса, вдоль участка длины корпуса. На фиг.54 показан вид в поперечном сечении узла 5300 зонда катетера по линиям 2-2, обозначенным на фиг.53. Как показано на фиг.54, акустическое окно 5326 формирует участок внешней окружности корпуса 5305 кончика катетера вдоль линий 2-2 поперечного сечения. Акустическое окно 5326 может, например, занимать 90° или больше внешней окружности корпуса 5305 кончика катетера. Акустическое окно может содержать, например, полиуретан, поливинилацетат или полиэфир. Ультразвуковая энергия, в форме акустических волн, может быть направлена через акустическое окно 5326 и во внутреннюю структуру тела пациента.
Как показано на фиг.54, корпус 5305 кончика катетера может иметь, в общем, круглое поперечное сечение. Кроме того, внешняя поверхность корпуса 5305 кончика катетера и акустического окна 5326 может быть гладкой. Такой гладкий, круглый внешний профиль может способствовать снижению формирования тромбов и/или повреждению ткани при перемещении узла 5300 зонда катетера (например, при его вращении, перемещении) внутри тела пациента.
Обычно изображения, генерируемые узлом 5300 зонда катетера, могут представлять собой изображения субъекта (например, внутренней структуры тела пациента) внутри объема 5327 изображения. Объем 5327 изображения продолжается наружу от узла 5300 зонда катетера перпендикулярно массиву 5307 преобразователей. Весь объем 5327 изображения может быть сканирован массивом 5307 преобразователей. Множество ультразвуковых преобразователей может быть расположено вдоль центральной оси 5308 и во время работы может сканировать плоскость изображения с шириной вдоль центральной оси 5308 и глубиной, перпендикулярной массиву 5307 преобразователей. Массив 5307 преобразователей может быть расположен на механизме, который во время работы возвратно-качательно поворачивает массив 5307 преобразователей вокруг центральной оси 5308 таким образом, что происходит сканирование плоскости изображения вдоль центральной оси 5308, для формирования объема изображения, как показано на фиг.53 и 54. Сканирование плоскости изображения вокруг центральной оси 5308 обеспечивает возможность для массива 5307 преобразователей сканировать весь объем 5327 изображений, и, таким образом, может быть сгенерировано трехмерное изображение объема 5327 изображения. Узел 5300 зонда катетера может во время работы возвратно-качательно поворачивать массив 5307 преобразователей со скоростью, достаточной для генерирования трехмерных изображений в режиме реального времени или близком к режиму реального времени объема 5327 изображения. При этом устройство формирования ультразвукового изображения во время работы может отображать живое или близкое к живому видеоизображение объема изображения. Параметрами формирования изображений внутри объема 5327 изображения, например, фокусным расстоянием и глубиной резкости можно управлять с помощью электронного средства, известного для специалиста в данной области техники.
Как отмечено выше, замкнутый объем 5317 может быть заполнен жидкостью. Жидкость может действовать как акустическое связующее для массива 5307 преобразователей с акустическим окном 5326 корпуса 5305 кончика катетера. При этом материал акустического окна 5326 может быть выбран так, чтобы он соответствовал акустическому импедансу и/или акустической скорости в жидкости тела пациента в области, где должен быть расположен кончик 5301 катетера во время формирования изображений.
Массив 5307 преобразователей может быть взаимно соединен с выходным валом 5329 двигателя 5306 на проксимальном конце массива 5307 преобразователей. Кроме того, массив 5307 преобразователей может поддерживаться на дистальном конце массива 5307 преобразователей с помощью шарнира 5330. Как показано на фиг.53, шарнир 5330 может представлять собой участок корпуса 5305 кончика катетера, который продолжается в направлении массива 5307 преобразователей вдоль оси поворота (например, центральной оси 5308) массива 5307 преобразователей. Массив 5307 преобразователей может иметь соответствующую выемку или карман вдоль его дистального конца для приема участка шарнира 5330. При этом стык между шарниром 5330 и массивом 5307 преобразователей может обеспечить возможность для массива 5307 преобразователей возвратно-качательно поворачиваться вокруг его оси вращения, по существу, предотвращая какое-либо боковое движение массива 5307 преобразователей относительно корпуса 5305 кончика катетера. В соответствии с этим, массив 5307 преобразователей во время работы может возвратно-качательно поворачиваться вокруг его оси вращения.
Двигатель 5306 может быть расположен внутри замкнутого объема 5317. Двигатель 5306 может представлять собой двигатель с электрически питанием, который во время работы поворачивает выходной вал 5329, в направлении, как по часовой стрелке, так и против часовой стрелки. При этом двигатель 5306 во время работы может возвратно-качательно поворачивать выходной вал 5329 двигателя 5306, и таким образом, возвратно-качательно поворачивать массив 5307 преобразователей, взаимно соединенных с выходным валом 5329.
Двигатель 5306 может иметь внешний участок, который имеет внешний диаметр, меньший, чем внутренний диаметр корпуса 5305 кончика катетера в области корпуса 5305 кончика катетера, где расположен двигатель 5306. Внешний участок двигателя 5306 может быть жестко закреплен на внутренней поверхности корпуса 5305 кончика катетера с помощью одного или нескольких креплений 5331 двигателя. Крепления 5331 двигателя могут, например, состоять из шариков клея. Крепления 5331 двигателя могут быть расположены между двигателем 5306 и внутренней поверхностью корпуса 5305 кончика катетера в местах, выбранных так, чтобы исключить взаимные помехи с движущимися элементами (описаны ниже), взаимно связанными с возвратно-поступательным движением массива 5307 преобразователей. Крепления 5331 двигателя могут быть расположены вдоль дистального конца внешнего участка двигателя 5306. Крепления 5331 двигателя также могут быть расположены вдоль проксимального конца внешнего участка двигателя 5306 таким образом, как, например, вдоль проксимального конца внешнего участка двигателя 5306 на стороне двигателя 5306, противоположной стороне, видимой на фиг.53.
Когда положение выходного вала 5329 известно, соответствующее положение массива 5307 преобразователей будет известно. Положения выходного вала 5329 можно отслеживать любым соответствующим образом, например, используя кодер и/или магнитный датчик положений. Положения выходного вала 5329 также можно отслеживать, используя жесткие фиксаторы, ограничивающие движение массива 5307 преобразователей. Такие жесткие фиксаторы (не показаны) могут ограничивать диапазон, в котором массив 5307 преобразователей может выполнять возвратно-качательные поворотные движения. В результате привода от двигателя 5306 в направлении по часовой стрелке или против часовой стрелки в течение определенного периода времени, можно предположить, что двигатель 5306 выполняет привод массива 5307 преобразователей до одного из жестких фиксаторов, и поэтому положение массива 5307 преобразователей может быть известно.
Электрические соединения двигателя 5306 с устройством формирования ультразвукового изображения могут быть выполнены с использованием специализированного набора электрических соединений (например, проводов), отдельных от элемента 5311 электрического соединения. В качестве альтернативы, электрические соединения с двигателем 5306 могут быть выполнены с использованием части проводников элемента 5311 электрического соединения. В случае, когда специализированный набор электрических соединений используется для связи с и/или привода двигателя 5306, такие соединения могут быть продолжены от двигателя 5306 до устройства формирования ультразвукового изображения любым соответствующим способом, включая в себя, например, внутреннюю часть 5319 стержня 5302 катетера и/или через зазор 5314. Кроме того, электрические соединения от устройства формирования ультразвукового изображения к другим компонентам, таким, как термопары, другие датчики или другие элементы, которые могут быть расположены внутри кончика 5301 катетера, могут быть достигнуты с использованием специализированного набора электрических соединений, или они могут быть выполнены с использованием части проводников элемента 5311 электрического соединения.
Элемент 5311 электрического соединения может электрически соединять массив 5307 преобразователей с устройством формирования ультразвукового изображения. Элемент 5311 электрического соединения может представлять собой микропроводниковый кабель, содержащий множество проводников, расположенных рядом друг с другом, с электроизолирующим материалом между проводниками. Элемент 5311 электрического соединения может быть выполнен в форме полоски. Например, элемент 5311 электрического соединения может содержать один или несколько кабелей GORE™ Micro-Miniature Ribbon Cables. Например, элемент 5311 электрического соединения может включать в себя 64 отдельных проводника.
Элемент 5311 электрического соединения может быть закреплен таким образом, что участок его будет зафиксирован относительно корпуса 5305 кончика катетера. Как отмечено выше, второй участок 5313 элемента 5311 электрического соединения может быть закреплен между внутренним слоем 5310 и внешним слоем 5309 стержня 5302 катетера. В замкнутом объеме 5317 первый конец 5332 первого участка 5312 элемента 5311 электрического соединения может быть закреплен на внутренней поверхности корпуса 5305 кончика катетера. При этом закрепление первого конца 5332 может быть выполнено таким образом, что переход от закрепленного участка элемента 5311 электрического соединения до незакрепленного участка может быть размещен перпендикулярно ориентации проводников (например, через ширину элемента 5311 электрического соединения) на первом конце 5332. В другом варианте осуществления изобретения элемент электрического соединения может быть закреплен на внутренней поверхности корпуса, используя его крепления между внутренним слоем 5310 и внешним слоем 5309 стержня 5302 катетера. В таком варианте осуществления изобретения переход от закрепленного до незакрепленного места может не быть ориентирован перпендикулярно проводникам элемента 5311 электрического соединения. Любой соответствующий способ крепления элемента 5311 электрического соединения на корпусе 5305 кончика катетера может использоваться. Например, может использоваться клей.
Поскольку во время сканирования массив 5307 преобразователей может шарнирно поворачиваться вокруг центральной оси 5308 относительно корпуса 5305 кончика катетера, элемент 5311 электрического соединения должен во время работы поддерживать электрическое соединение с массивом 5307 преобразователей, в то время как массив 5307 преобразователей выполняет шарнирный поворот относительно корпуса 5305 кончика катетера, на котором закреплен элемент 5311 электрического соединения на первом конце 5332. Это может быть обеспечено путем намотки в виде витков первого участка 5312 элемента 5311 электрического соединения внутри замкнутого объема 5317. Первый конец 5332 этих витков может быть закреплен, как описано. Второй конец 5333 этих витков может быть закреплен на держателе 5334 соединения, который поворачивается вокруг массива 5307 преобразователей вокруг центральной оси 5308. В случае, когда элемент 5311 электрического соединения имеет форму ленты, первый участок 5312 элемента 5311 электрического соединения может быть расположен таким образом, что верхняя или нижняя часть этой ленты обращена и обернута вокруг центральной оси 5308.
На фиг.53 показана конфигурация, в которой первый участок 5312 элемента 5311 электрического соединения расположен по спирали внутри замкнутого объема 5317. Первый участок 5312 элемента 5311 электрического соединения может быть намотан в виде витков вокруг центральной оси 5308 множество раз. Первый участок 5312 элемента 5311 электрического соединения может быть намотан в виде витков вокруг центральной оси 5308 таким образом, что первый участок 5312 элемента 5311 электрического соединения формирует спираль вокруг центральной оси 5308. Благодаря намотке в виде витков элемента 5311 электрического соединения вокруг центральной оси 5308 множество раз, нежелательный противодействующий крутящий момент при шарнирном повороте массива 5307 преобразователя может быть существенно исключен. Шарнирный поворот массива 5307 преобразователей вокруг центральной оси 5308 в такой конфигурации может привести к незначительному стягиванию или незначительному ослаблению витков намотанного первого участка 5312 элемента 5311 электрического соединения. Такое незначительное стягивание и ослабление может привести к тому, что в каждом витке (например, в каждом отдельном обороте спирали вокруг центральной оси 5308) формирует только незначительное поперечное смещение и соответствующее смещение жидкости. Кроме того, такое смещение может не быть однородным для каждого витка спирали. Кроме того, путем распределения движения первого участка 5312 элемента 5311 электрического соединения по множеству витков, механические напряжения при движении распределяются по всему расположенному по спирали первому участку 5312. В результате распределения механических напряжений, обеспечивается более длительный срок механической работы элемента 5311 электрического соединения. Расположенный по спирали первый участок 5312 элемента 5311 электрического соединения может быть расположен по спирали так, что его витки не накладываются друг на друга (например, ни один участок элемента 5311 электрического соединения не накладываются друг на друга в области спирали). Следует понимать, что в другом варианте осуществления изобретения, ось поворота массива 5307 преобразователей и соответствующая структура могут быть смещены от центральной оси 5308. Кроме того, следует понимать, что в различных вариантах осуществления изобретения, ось спирали, ось поворота массива 5307 преобразователей и центральная ось 5308 все могут быть смещены друг от друга, все могут совпадать, или две из осей могут совпадать и могут быть смещены от третьей оси.
Элемент 5311 электрического соединения может включать в себя слои заземления и основания. Слои заземления и основания могут быть выполнены по-другому, чем другие проводники элемента 5311 электрического соединения. Например, слой заземления может быть выполнен в форме плоскости, продолжающейся вдоль ширины элемента 5311 электрического соединения и продолжающейся вдоль всей длины элемента 5311 электрического соединения. Вдоль первого участка элемента 5312 электрического соединения слой заземления и/или слой основания могут быть отделены от остального первого участка элемента 5312 электрического соединения. В соответствии с этим, слой заземления и/или слой основания могут быть выполнены форме отдельных проводников (не показаны) между первым концом 5332, и держателем 5334 соединения. Такая компоновка позволяет получить более гибкую структуру, чем показана на фиг.53, где первый участок элемента 5312 электрического соединения включает в себя слои заземления и основания.
Первый участок элемента 5312 электрического соединения, расположенный в замкнутом объеме 5317, может включать в себя дополнительные слои изоляции относительно второго участка 5313. Такие дополнительные слои могут обеспечивать защиту от жидкости, занимающей замкнутый объем, и/или такие дополнительные слои могут обеспечивать защиту от износа, ввиду того, что первый участок элемента 5312 электрического соединения находится в контакте с другими компонентами (например, с корпусом 5305). Дополнительные слои могут, например, быть выполнены в виде одного или нескольких покрытий и/или могут быть многослойными.
Участок корпуса 5305, который окружает замкнутый объем 5317 в области первого участка элемента 5312 электрического соединения, может быть конструктивно усилен для противодействия прогибу. Такое усиление может быть представлено в форме дополнительных слоев, соединенных с внутренней и/или внешней поверхностью корпуса 5305, или в форме элементов конструктивных держателей, закрепленных на корпусе 5305.
В одном варианте осуществления изобретения первый участок 5312 элемента 5311 электрического соединения может включать в себя, в общем, приблизительно три витка вокруг центральной оси 5308. Общая длина корпуса 5305 кончика катетера может быть выбрана так, чтобы в ней размещалось количество витков, требуемое для первого участка 5312 элемента 5311 электрического соединения. Общее количество витков спирали для первого участка 5312 элемента 5311 электрического соединения может быть определено на основе, по меньшей мере, частично, требуемого расширения и сжатия витков во время шарнирного движения, требуемого уровня противодействующего крутящего момента, прикладываемого к двигателю 5306 первым участком 5312 во время возвратно-качательного движения, и требуемой общей длины корпуса 5305 кончика катетера. В замкнутом объеме 5317 первый участок 5312 элемента 5311 электрического соединения может быть расположены по спирали таким образом, что присутствует зазор между внешним диаметром спирали первого участка 5312 и внутренней поверхностью корпуса 5305 кончика катетера, как показано на фиг.53.
Расположенный по спирали первый участок 5312 элемента 5311 электрического соединения может быть размещен таким образом, что объем, внутри которого расположен по спирали первый участок 5312, может содержать трубку или другой компонент с каналом, сформированным в нем, или другой соответствующий компонент. Такие каналы могут использоваться для любого соответствующего действия, такого как, например, вставка катетера, подача лекарства, извлечение устройства и/или отслеживание направляемого провода. Например, трубка с каналом, сформированным в ней, может быть расположена внутри расположенного спирально первого участка 5312. Такая трубка может продолжаться от проксимального конца узла 5300 зонда катетера, проходя через конечную стенку 5318 замкнутого объема (в вариантах осуществления, включающую в себя конечную стенку 5318 замкнутого объема) и сквозь улавливатель 5322 пузырьков (в вариантах осуществления, включающих в себя улавливатель 5322 пузырьков). В таком варианте осуществления улавливатель 5322 пузырьков может быть смещен от центральной оси 5308 для размещения трубки. Участок такого канала может продолжаться через, по меньшей мере, участок первого участка элемента 5312 электрического соединения. В одном варианте осуществления изобретения трубка и канал могут заканчиваться в боковом отверстии. Например, канал может заканчиваться на боковой стенке корпуса в области, где установлен расположенный по спирали первый участок 5312.
Держатель 5334 соединения может использоваться для удержания соединения между элементом 5311 электрического соединения и гибкой платой 5335. Как отмечено, второй конец 5333 первого участка 5312 элемента 5311 электрического соединения может быть гибко закреплен на держателе 5334 соединения. Кроме того, гибкая плата 5335 может быть гибко закреплена на держателе 5334 соединения. Отдельные проводники элемента 5311 электрического соединения могут быть электрически соединены с отдельными проводниками гибкой платы 5335. Гибкая плата 5335 может использоваться для электрического соединения элемента 5311 электрического соединения с массивом 5307 преобразователей. Уплотнительный материал может быть расположен на электрически взаимных соединениях между элементом 5311 электрического соединения и гибкой платой 5335. Уплотнительный материал может быть нанесен, как слой поверх электрических соединений. В другом варианте осуществления изобретения жесткий соединительный элемент может использоваться вместо описанной выше гибкой платы 5335. Такой жесткий соединительный элемент может использоваться для электрического соединения элемента 5311 электрического соединения с массивом 5307 преобразователей.
Держатель 5334 соединения может быть выполнен, как полый цилиндр, который во время работы располагается вокруг внешней поверхности двигателя 5306. В качестве альтернативы, держатель 5334 соединения может быть выполнен, как изогнутая плоскость, которая не полностью обернута вокруг внешней поверхности двигателя 5306. В любом случае (например, полый цилиндр или изогнутая плоскость), держатель 5334 соединения во время работы может поворачиваться вокруг участка внешней поверхности двигателя 5306. При этом, когда двигатель 5306 возвратно-качательно поворачивает массив 5307 преобразователей, подкладка 5328 массива 5307 преобразователей, благодаря ее фиксированному соединению с массивом 5307 преобразователей, также будет возвратно-качательно поворачиваться. В свою очередь, благодаря ее фиксированному соединению с подкладкой 5328 массива преобразователей, гибкая плата 5335 также будет возвратно-качательно поворачиваться. В свою очередь, благодаря их фиксированному соединению с гибкой платой 5335, держатель 5334 соединения и второй конец 5333 первого участка 5312 элемента 5311 электрического соединения также будет возвратно-качательно поворачиваться вместе с массивом 5307 преобразователей.
В другом варианте осуществления изобретения держатель 5334 соединения и гибкая плата 5335 могут быть выполнены из одной гибкой платы. В таком варианте осуществления изобретения участок держателя 5334 соединения единой печатной платы может быть сформирован, по меньшей мере, как часть цилиндра таким образом, что он может быть расположен, по меньшей мере, частично вокруг внешней поверхности двигателя 5306.
Хотя массив 5307 преобразователей и соответствующие элементы, в общем, описаны здесь, как расположенные внутри кончика 5301 катетера на дистальном конце 5303 узла 5300 зонда катетера, можно рассмотреть другие конфигурации. Например, в другом варианте осуществления изобретения элементы, расположенные внутри кончика 5301 катетера, могут быть расположены в точке вдоль стержня 5302 катетера, которая смещена от дистального конца 5303 узла 5300 зонда катетера. При этом участки стержня 5302 катетера и/или другие компоненты могут быть расположены дистально к кончику 5301 катетера.
В альтернативном варианте осуществления изобретения корпус 5305 кончика катетера может быть выполнен в виде защитного корпуса, расположенного вокруг элемента 5311 электрического соединения, двигателя 5306, массива 5307 и других соответствующих компонентов узла 5300 зонда катетера. Такой корпус может обеспечить возможность проникновения крови (или другой жидкости тела пациента) в объем, соответствующий замкнутому объему 5317, в соответствии с вариантом осуществления изобретения по фиг.53. В таком варианте осуществления изобретения не потребовалось бы использовать элемент 5320 сильфона или улавливатель 5322 пузырьков. Корпус может быть открытым в достаточной степени, чтобы обеспечить возможность крови протекать через объем, соответствующий замкнутому объему 5317, и при этом иметь достаточную структуру, которая упрощает защиту кровеносных сосудов и/или других структур пациента от повреждения в результате контакта с узлом 5300 зонда катетера. Кроме того, в таком варианте осуществления изобретения акустическая структура может быть взаимно соединена с массивом 5307. Акустическая структура может быть выполнена в виде материала или материалов, выбранных для поддержания возможности формирования изображения массива 5307. Акустическая структура может быть закруглена в поперечном сечении для снижения турбулентности в окружающей крови, уменьшения повреждения окружающих кровяных клеток и может способствовать исключению формирования тромбов, в то время как массив выполняет возвратно-качательное шарнирное движение. Другие компоненты также могут быть сформированы так, чтобы помогать уменьшать турбулентность, исключать формирование тромбов и предотвращать повреждения кровяных клеток.
На фиг.55 показан вид с частичным разрезом варианта осуществления узла 5344 ультразвукового зонда катетера. Элементы, аналогичные представленным в одном варианте осуществления изобретения со ссылкой на фиг.53, обозначены символом штрих ('), который следует после номера ссылочной позиции. Узел 5344 зонда катетера включает в себя кончик 5301' катетера, закрепленный на стержне 5302' катетера. В общем, узел 5344 зонда катетера включает в себя приводной вал 5343, взаимно соединенный с массивом 5307 преобразователей. Приводной вал 5343 во время работы выполняет возвратно-качательные движения и, поэтому, обеспечивает возвратно-качательные движения массива 5307 преобразователей, взаимно соединенного с ним. Элемент 5311' электрического соединения включает в себя первый участок 5342, расположенный на дистальном конце 5303 узла 5344 зонда катетера и во время работы воспринимает возвратно-качательное движение массива 5307 преобразователей. Элемент 5311' электрического соединения дополнительно включает в себя второй участок 5313, расположенный вдоль стержня 5302' катетера. Элемент 5311' электрического соединения дополнительно включает в себя третий участок 5340, расположенный вдоль корпуса 5305' кончика катетера и во время работы электрически соединяет первый участок 5342 со вторым участком 5313.
Узел 5344 зонда катетера, в общем, может иметь такие размеры и такую форму, которые позволяют вставлять его в тело пациента и впоследствии формировать изображения внутреннего участка тела пациента. Узел 5344 зонда катетера, в общем, может включать в себя дистальный конец 5303 и проксимальный конец (не показан). Во время формирования изображений дистальный конец 5303 узла 5344 зонда катетера может быть расположен внутри тела пациента. Кончик 5301' катетера может быть расположен между дистальным концом 5303 и проксимальным концом 5304 кончика 5301' катетера. Кончик 5301' катетера может включать в себя корпус 5305' кончика катетера. Кончик 5301' катетера может включать в себя центральную ось 5308. Замкнутый объем 5317' может быть определен корпусом 5305' кончика катетера и приводным валом 5343. Замкнутый объем 5317' может быть заполнен жидкостью и герметизирован.
Для стержня 5302' катетера может использоваться любой соответствующий способ направления, такой как, но без ограничений, набор проводов управления и ассоциированных элементов управления для активного управления стержнем 5302' катетера. Стержень 5302' катетера может быть гибким и, поэтому во время работы может направляться через и следовать контурам структуры тела пациента, такой как контуры сосудистой системы.
Узел 5344 зонда катетера включает в себя массив 5307 преобразователей и подкладку 5328 массива. В общем, массив 5307 преобразователей во время работы передает ультразвуковую энергию через акустическое окно 5326 корпуса 5305' кончика катетера. В общем, изображения, генерируемые узлом 5344 зонда катетера, могут представлять собой изображение субъекта (например, внутренней структуры пациента) внутри объема 5327' формирования изображения.
Массив 5307 преобразователей может быть взаимно соединен с приводным валом 5343, и приводной вал 5343 во время работы может возвратно-качательно поворачивать массив 5307 преобразователей вокруг центральной оси 5308 таким образом, что будет происходить сканирование плоскости изображения вокруг центральной оси 5308 для формирования объема 5327' изображения, как показано на фиг.55. Сканирование плоскости формирования изображения вокруг центральной оси 5308 обеспечивает возможность сканирования массивом 5307 преобразователей всего объема 5327' изображения, и, таким образом, может быть сгенерировано трехмерное изображение объема 5327' изображения. Приводной вал 5343 во время работы может возвратно-качательно поворачивать массив 5307 преобразователей с достаточной скоростью для генерирования трехмерных изображений в режиме реального времени или в режиме, близком к режиму реального времени объема 5327' изображения. Массив 5307 преобразователей может быть взаимно соединен с приводным валом на проксимальном конце массива 5307 преобразователей.
Приводной вал 5343, и, поэтому, массив 5307 преобразователей, взаимно соединенный с приводным валом 5343, могут выполнять возвратно-качательные движения, используя любое соответствующее средство. Например, проксимальный конец узла 5344 зонда катетера может включать в себя двигатель, выполненный с возможностью привода в возвратно-качательные движения приводного вала 5343, как в направлении по часовой стрелке, так и в направлении против часовой стрелки. При этом двигатель во время работы может возвратно-качательно поворачивать приводной вал 5343 и, поэтому, выполнять возвратно-поступательный поворот массива 5307 преобразователей, взаимно соединенного с приводным валом 5343.
Когда положения приводного вала 5343 известны, соответствующее положение массива 5307 преобразователей будет известно. Положения приводного вала 5343 можно отслеживать любым соответствующим способом, например, путем использования кодера и/или магнитного датчика положений.
Элемент 5311' электрического соединения может электрически соединять массив 5307 преобразователей с устройством формирования ультразвукового изображения. Элемент 5311' электрического соединения может представлять собой многопроводный кабель, содержащий множество проводников, расположенных рядом друг с другом, с электроизолирующим материалом между проводниками.
Элемент 5311' электрического соединения может быть закреплен таким образом, что участок его закреплен относительно корпуса 5305' кончика катетера. Как отмечено выше, второй участок 5313 элемента 5311' электрического соединения может быть закреплен на стержне 5302' катетера. Внутри замкнутого объема 5317' третий участок 5340 элемента 5311' электрического соединения может быть закреплен на внутренней поверхности корпуса 5305' кончика катетера. Третий участок 5340 элемента 5311' электрического соединения может быть закреплен на корпусе 5305'' кончика катетера в области, соответствующей положению массива 5307 преобразователей. При этом третий участок 5340 из элемента 5311' электрического соединения может быть расположен так, чтобы он не мешал возвратно-качательному движению массива 5307 преобразователей. Любой соответствующий способ крепления элемента 5311' электрического соединения на корпусе 5305' кончика катетера может использоваться. Например, может использоваться клей.
Первый участок 5342 элемента 5311' электрического соединения во время работы выполнен с возможностью поддерживать электрическое соединение с массивом 5307 преобразователей, в то время, как массив 5307 преобразователей шарнирно поворачивается относительно корпуса 5305' кончика катетера. Это может быть достигнуто путем намотки в виде витков первого участка 5342 элемента 5311' электрического соединения внутри замкнутого объема 5317'. Один конец первого участка 5342 элемента 5311' электрического соединения может быть закреплен на корпусе 5305' кончика катетера в точке 5341 тяги, которая расположена дистально массиву 5307 преобразователей. Другой конец первого участка 5342 из элемента 5311' электрического соединения может быть электрически соединен с подкладкой 5328 массива или с гибкой платой, или другим электрическим элементом (не показан), который, в свою очередь, электрически соединен с массивом 5307 преобразователей. В случае, когда элемент 5311' электрического соединения имеет форму полоски, первый участок 5342 из элемента 5311' электрического соединения может быть расположен таким образом, что верхняя или нижняя сторона полоски обращены к и намотаны вокруг центральной оси 5308.
На фиг.55 показан конфигурация, где первый участок 5342 элемента 5311' электрического соединения спирально расположен внутри участка замкнутого объема 5317', дистально к массиву 5307 преобразователей. Первый участок 5342 элемента 5311' электрического соединения может быть намотан в виде витков вокруг центральной оси 5308 с формированием множества витков. Первый участок 5342 элемента 5311' электрического соединения может быть намотан в виде витков вокруг центральной оси 5308 таким образом, что первый участок 5342 элемента 5311' электрического соединения формирует спираль вокруг центральной оси 5308. Как и в варианте осуществления фиг.53, благодаря намотке в виде витков элемента 5311' электрического соединения вокруг центральной оси 5308 с формированием множества витков может в существенной степени быть исключено нежелательное противодействие крутящего момента на шарнирный поворот массива 5307 преобразователей.
В одном варианте осуществления изобретения первый участок 5342 элемента 5311' электрического соединения может включать в себя в общей сложности приблизительно три витка вокруг центральной оси 5308. Общая длина корпуса 5305' кончика катетера может быть выбрана так, чтобы разместить количество витков, необходимое для первого участка 5342 элемента 5311' электрического соединения.
Дистальный конец приводного вала 5343 может быть герметизирован вдоль его внешнего периметра, используя уплотнительный материал 5316'. Уплотнительный материал 5316' может быть расположен, как показано, между приводным валом 5343 и внутренней поверхностью корпуса 5305' кончика катетера. В другом варианте осуществления изобретения внешний слой 5309' стержня 5302' катетера может продолжаться до или за пределы дистального конца приводного вала 5343 и в таком варианте осуществления изобретения, уплотнительный материал 5316' может быть расположен между приводным валом 5343 и внутренней поверхностью внешнего слоя 5309'. Уплотнительный материал 5316' может включать в себя любой соответствующий материал и/или структуру, которая обеспечивает возможность относительного поворотного движения между приводным валом 5343 и внешним слоем 5309', предотвращая по существу, поток жидкости из замкнутого объема 5317' через уплотнительный материал 5316'. В другом варианте осуществления изобретения стержень 5302' катетера может включать в себя внутренний слой (аналогичный внутреннему слою 5310 по фиг.53), и приводной вал 5343 может быть расположен в пределах внутреннего слоя. В таком варианте осуществления изобретения, внутренний слой, внешний слой 5309', объем между внутренним слоем и внешним слоем 5309', или любая их комбинация, могут содержать дополнительные компоненты, такие как, например, вытяжные провода, усилительные элементы и/или дополнительные электрические проводники.
На фиг.56А и 56В показан другой вариант осуществления узла 5349 ультразвукового катетерного зонда. Элементы, аналогичные показанным в вариантах осуществления изобретения со ссылкой на фиг.55, обозначены символом два штриха (''), который следует после номера ссылочной позиции. Узел 5349 катетерного зонда включает в себя кончик 5301'' катетера, закрепленный на стержне 5302' катетера. В этом варианте осуществления изобретения узел 5349 катетерного зонда включает в себя приводной вал 5343, взаимно соединенный с массивом 5307 преобразователей. Элемент 5311'' электрического соединения включает в себя первый участок 5346, расположенный на дистальном конце 5303 узла 5349 катетерного зонда и, во время работы воспринимает возвратно-качательное движение массива 5307 преобразователей. Элемент 5311'' электрического соединения дополнительно включает в себя второй участок 5313, расположенный вдоль стержня 5302" катетера. Элемент 5311'' электрического соединения дополнительно включает в себя третий участок 5340, расположенный вдоль корпуса 5305" кончика катетера и во время работы электрически соединяет первый участок 5346 со вторым участком 5313. Замкнутый объем 5317'' может быть определен корпусом 5305'' кончика катетера и приводным валом 5343. Замкнутый объем 5317'' может быть заполнен жидкостью и герметизирован.
Узел 5349 катетерного зонда включает в себя массив 5307 преобразователей и подкладку 5328 массива. Массив 5307 преобразователей может быть соединен с приводным валом 5343, и приводной вал 5343 во время работы может возвратно-качательно поворачивать массив 5307 преобразователей вокруг центральной оси 5308 таким образом, что плоскость изображения будет сканирована вокруг центральной оси 5308, для формирования объема 5327' трехмерного изображения, как показано в продольном разрезе на фиг.56А.
Элемент 5311' электрического соединения может электрически соединять массив 5307 преобразователей с устройством формирования ультразвукового изображения (не показано). Элемент 5311'' электрического соединения может включать в себя участок, включающий в себя многопроводный кабель, содержащий множество проводников, расположенных рядом друг с другом с электроизолирующим материалом между проводниками. Элемент 5311'' электрического соединения может дополнительно включать в себя участок, включающий в себя гибкую плату.
Элемент 5311'' электрического соединения может быть закреплен таким образом, что участок его фиксируется относительно корпуса 5305'' кончика катетера. Как отмечено выше, второй участок 5313 элемента 5311'' электрического соединения может быть закреплен на стержне 5302' катетера. В пределах замкнутого объема 5317'', третий участок 5340 элемента 5311'' электрического соединения может быть закреплен на внутренней поверхности корпуса 5305'' кончика катетера. Третий участок 5340 элемента 5311'' электрического соединения может быть закреплен на корпусе 5305" кончика катетера в области, соответствующей положению массива 5307 преобразователей. При этом третий участок 5340 элемента 5311'' электрического соединения может быть расположен таким образом, чтобы он не мешал возвратно-качательному движению массива 5307 преобразователей. Любой соответствующий способ крепления третьего участка 5340 элемента 5311'' электрического соединения с корпусом 5305'' кончика катетера может использоваться. Например, можно использовать клей.
Первый участок 5346 элемента 5311'' электрического соединения во время работы выполнен с возможностью поддерживать электрическое соединение с массивом 5307 преобразователей, в то время как массив 5307 преобразователей шарнирно поворачивается относительно корпуса 5305'' кончика катетера. Это может быть достигнуто путем намотки первого участка 5346 в виде витков элемента 5311'' электрического соединения внутри замкнутого объема 5317''. Один конец первого участка 5346 элемента 5311'' электрического соединения может быть закреплен на корпусе 5305'' кончика катетера в точке 5348 крепления, которая расположена дистально массиву 5307 преобразователей. Другой конец первого участка 5346 элемента 5311'' электрического соединения может быть электрически соединен с участком 5347 соединения витков с подкладкой элемента 5311'' электрического соединения. Участок 5347 соединения витков с подкладкой элемента 5311'' электрического соединения может быть электрически соединен с первым участком 5346 элемента 5311'' электрического соединения с подкладкой 5328. Первый участок 5346 элемента 5311'' электрического соединения может иметь, в общем, плоское поперечное сечение и может быть расположен таким образом, что верхняя или нижняя сторона первого участка 5346 обращена и намотана вокруг центральной оси 5308. Первый участок 5346 элемента 5311'' электрического соединения может быть намотан в виде компоновки "часовой пружины", где, как представлено на фиг.56А и 56В, по существу, полностью первый участок 5346 элемента 5311" электрического соединения расположен в той же точке вдоль центральной оси 5308. При этом центральная линия первого участка 5346 элемента 5311'' электрического соединения может, в общем, занимать одну плоскость, которая расположена перпендикулярно центральной оси 5308. Один конец часовой пружины первого участка 5346 элемента 5311'' электрического соединения может быть электрически соединен с третьим участком 5340, в то время как другой конец может быть электрически соединен с участком 5347 соединения витков с подкладкой. Хотя на фиг.56А и 56В показан часовая пружина первого участка 5346, как имеющая один виток, часовая пружина первого участка 5346 может состоять из более или менее чем одного витка. Например, в одном варианте осуществления изобретения часовая пружина первого участка 5346 может включать в себя 1,5 или 2 концентрических витка (то есть, часовая пружина первого участка 5346 может быть обернута 1,5 или 2 раза). В компоновке часовая пружина первого участка 5346, третий участок 5340 и участок 5347 соединения витков с подкладкой элемента 5311'' электрического соединения могут быть выполнены из одной гибкой платы или другого проводника, такого как GORE™ Micro-Miniature Ribbon Cable.
Аналогично вариантам осуществления изобретения по фиг.53 и 55, благодаря намотке в виде витков часовой пружины первого участка 5346 элемента 5311'' электрического соединения (например, вокруг оси, параллельной центральной оси 5308), нежелательный противодействующий крутящий момент, действующий на массив 5307 преобразователей, может быть в существенной степени исключен. При этом шарнирный поворот массива 5307 преобразователей вокруг центральной оси 5308 в такой конфигурации может привести к незначительному стягиванию или незначительному ослаблению витков часовой пружины первого участка 5346 элемента 5311'' электрического соединения. Такое незначительное стягивание и ослабление может привести к тому, что в каждой катушке (например, в каждом отдельном витке часовой пружины вокруг центральной оси 5308) формируется только незначительное поперечное смещение и соответствующее смещение жидкости.
В альтернативных конфигурациях узлов 5344 5349 катетерного зонда по фиг.55 и 56А, двигатели (не показаны) могут использоваться вместо приводных валов 5343. Такие двигатели могут быть расположены рядом с проксимальными концами кончиков 5301', 5301'' катетера. Такие двигатели могут быть расположены внутри замкнутых объемов 5317', 5317'', или они могут быть расположены за пределами замкнутых объемов 5317', 5317''.
Аналогично, как описано выше со ссылкой на фиг.53, в альтернативных вариантах осуществления изобретения, корпусы 5305', 5305'' кончика катетера, в соответствии с вариантами осуществления изобретения по фиг.55 и 56А, могут быть выполнены в форме защитных корпусов, расположенных вокруг элементов 5311', 5311'' электрического соединения, массивов 5307 и других соответствующих компонентов узлов 5344, 5349 катетерного зонда. Такие корпусы могут обеспечить протекание крови (или другой телесной жидкости) в объемы, соответствующие замкнутым объемам 5317', 5317'', в соответствии с вариантами осуществления по фиг.55 и 56А. Корпусы могут быть в достаточной степени открытыми, чтобы обеспечить возможность протекания крови через объемы, соответствующие замкнутым объемам 5317', 5317'', и иметь достаточную структуру, чтобы способствовать защите тканей от повреждений в результате контакта с узлами 5344, 5349 катетерного зонда или их компонентами. Кроме того, и аналогично описанному выше, акустические структуры, такие как линзы или покрытия, могут быть взаимно соединены со стороной, излучающей сигнал, массивов 5307. Другие компоненты также могут иметь форму, которая способствует уменьшению турбулентности, исключает формирование тромбов и исключает повреждения тканей или кровяных клеток.
В вариантах осуществления изобретения, которые включают в себя замкнутый объем внутри корпуса кончика катетера, и в вариантах осуществления изобретения, в которых корпус кончика катетера представляет собой корпус, который открыт для окружающей среды, участок корпуса кончика катетера в области спирально намотанного электрического соединения (например, первый участок электрического соединения 5312) может быть управляемым и/или гибким. В такой управляемой и/или гибкой конфигурации механические напряжения, из-за управления и/или изгиба в электрическом соединении, могут быть распределены, по существу, по всему спирально намотанному участку.
На фиг.57 показана система 5700 формирования ультразвукового изображения, выполненная с возможностью формирования трехмерного изображения в режиме реального времени с ручкой 5701 и катетером 5702. Катетер 5702 включает в себя корпус 5703 катетера и отклоняющийся элемент 5704. Отклоняющийся элемент 5704 может быть шарнирно соединен с дистальным концом 5712 корпуса 5703 катетера. Отклоняющийся элемент 5704 может иметь шарнир. Корпус 5703 катетера может быть гибким и может быть выполнен с возможностью изгиба так, чтобы следовать контуру телесного сосуда, в который его вставляют, или направляет по направляющему проводу или через оболочку.
Система 5700 формирования ультразвукового изображения может дополнительно включать в себя контроллер 5705 двигателя и ультразвуковую консоль 5706. Контроллер 5705 двигателя во время работы может управлять двигателем (варианты осуществления которого описаны ниже), который может быть расположен внутри или взаимно соединен с ультразвуковым массивом внутри отклоняющегося элемента 5704. Ультразвуковая консоль 5706 может включать в себя процессор формирования изображения, выполненный с возможностью обработки сигналов из ультразвукового массива, и устройство дисплея, такое, как монитор. Различные функции, описанные со ссылкой на контроллер 5705 двигателя и ультразвуковую консоль 5706, могут быть выполнены с помощью отдельного компонента или с помощью любого соответствующего количества дискретных компонентов.
Шарниры, описанные здесь, могут быть основаны на изгибе (например, пленочные шарниры) и/или повороте (например, когда шарнир включает в себя штифт вдоль оси шарнирного поворота) для определения относительного движения между отклоняющимся элементом и корпусом катетера. Такие шарниры могут включать в себя нетрубчатый участок, который обеспечивает возможность для отклоняющегося элемента и корпуса катетера двигаться относительно друг друга. Таким образом, типичная компоновка управления катетером, которая расположена на одной стороне трубчатого участка катетера, сжимается в большей степени, чем противоположная сторона трубчатого участка для получения изгиба катетера, который обычно не считается шарнирным.
Ручка 5701 может быть расположена на проксимальном конце 5711 катетера 5702. Пользователь (например, клинический врач, техник, врач - интервенционный хирург) катетера 5702 может управлять корпусом 5703 катетера, отклонением отклоняющегося элемента и различными другими функциями катетера 5702. В этом отношении, ручка 5701 включает в себя два ползуна 5707а, 5707b для управления корпусом 5703 катетера. Эти ползуны 5707а, 5707b могут быть взаимно соединены с проводами управления, таким образом, что, когда ползуны 5707а, 5707b перемещают относительно друг друга, участок корпуса 5703 катетера может изгибаться управляемым образом. Может использоваться любой другой соответствующий способ управления проводами управления в корпусе 5703 катетера. Например, ползуны могут быть заменены альтернативными средствами для управления, такими как поворотные ручки или кнопки. Может использоваться любое соответствующее количество проводов управления в корпусе 5703 катетера.
Ручка 5701 дополнительно включает в себя контроллер 5708 отклонения. Контроллер 5708 отклонения может использоваться для управления отклонением отклоняющегося элемента 5704 относительно корпуса 5703 катетера. Представленный контроллер 5708 отклонения выполнен в виде вращающейся ручки, где поворот контроллера 5708 отклонения приводит к соответствующему отклонению отклоняющегося элемента 5704. Другие конфигурации контроллера 5708 отклонения рассматриваются, включая в себя, например, ползун, аналогичный ползуну 5707а.
Ручка 5701 может дополнительно включать в себя кнопку 5709 активации двигателя в вариантах осуществления системы 5700 формирования ультразвукового изображения, которая включает в себя двигатель внутри отклоняющегося элемента 5704. Кнопка 5709 активации двигателя может использоваться для активации и/или отключения двигателя.
Ручка 5701 может дополнительно включать в себя отверстие 5710 в вариантах осуществления системы 5700 формирования ультразвукового изображения, которая включает в себя канал в корпусе 5703 катетера. Отверстие 5710 сообщается с каналом таким образом, что канал может использоваться для перемещения устройства и/или материала.
Во время использования пользователь может удерживать ручку 5701 и манипулировать одним или обоими ползунами 5707а, 5707b для управления корпусом 5703 катетера, по мере того, как катетер 5702 перемещается в требуемое анатомическое положение. Ручка 5701 и ползуны 5707а, 5707b могут быть выполнены таким образом, что, положение ползунов 5707а, 5707b относительно ручки 5701 может поддерживаться, поддерживая, таким образом, или "блокируя" выбранное положение корпуса 5703 катетера. Контроллер 5708 отклонения может затем использоваться для отклонения отклоняющегося элемент 5704 в требуемое положение. Ручка 5701 и контроллер 5708 отклонения могут быть выполнены таким образом, что положение контроллера 5708 отклонения относительно ручки 5701 может поддерживаться, поддерживая, таким образом, или "блокируя" выбранное отклонение отклоняющегося элемента 5704. При этом отклоняющийся элемент 5704 может отклоняться избирательно, и корпусом 5703 катетера можно избирательно независимо управлять. Кроме того, отклонение отклоняющегося элемента 5704 может быть избирательно блокировано, и форма корпуса 5703 катетера может быть независимо избирательно блокирована. Такое удержание положения может, по меньшей мере, частично быть достигнуто, например, с помощью трения, стопоров и/или любого другого соответствующего средства. Все элементы управления для управления, отклонения и двигателя могут работать независимо, и пользователь может управлять ими.
Система 5700 формирования ультразвукового изображения может использоваться для захвата изображений объема 5714 формирования трехмерных изображений и/или захвата 3D изображения в режиме реального времени 5714. Положение отклоняющегося элемента 5704 может быть установлено путем управления корпусом 5703 катетера, с которым соединен отклоняющийся элемент 5704, или с использованием комбинации управления корпусом 5703 катетера и соединения с отклоняющимся элементом 5704. Кроме того, в вариантах осуществления изобретения с каналом, система 5700 формирования ультразвукового изображения может дополнительно использоваться, например, для подачи устройства и/или материалов в выбранную область или выбранные области внутри тела пациента.
Корпус 5703 катетера может иметь, по меньшей мере, один электропроводный провод, который выходит из проксимального конца катетера 5711 через отверстие или другое отверстие в корпусе 5703 катетера, и электрически соединен с приводом преобразователей и процессором изображения (например, в ультразвуковой консоли 5706).
Кроме того, в вариантах осуществления изобретения с каналом, пользователь может вставлять интервенционное устройство (например, диагностическое устройство и/или терапевтическое устройство) или материал, или может извлекать устройство и/или материал через отверстие 5710. Пользователь может затем подавать интервенционное устройство через корпус 5703 катетера для перемещения интервенционного устройства к дистальному концу 5712 корпуса 5703 катетера. Электрические соединения между ультразвуковой консолью 5706 и отклоняющимся элементом 5704 могут быть направлены через отверстие 5713 электронного устройства и через корпус 5703 катетера, как описано выше.
На фиг.58 показан вид в поперечном сечении корпуса 5703 катетера по фиг.57. Корпус 5703 катетера включает в себя четыре провода 5801а-5801d, расположенных через равные интервалы внутри корпуса 5703 катетера, для использования при управлении управляемого участка корпуса 5703 катетера (также называется 4-сторонним управлением), для направления катетера 5702 в соответствующую анатомию. Управление может быть выполнено путем избирательного отклонения вдоль управляемого участка корпуса 5703 катетера. При этом два провода управления 5801а, 5801 с могут быть взаимно соединены с ползуном 5707а, таким образом, что перемещение ползуна 5707а в первом направлении приводит к тому, что дистальный участок провода 5801а управления будет вытянут в направлении ручки 5701. Аналогичная манипуляция проводами 5801b-5801d управления или соответствующей их комбинации может привести к изгибу управляемого участка корпуса 5703 катетера в требуемом направлении. В качестве альтернативы, в некоторых вариантах осуществления могут использоваться меньше или больше чем четыре провода управления. Провода управления также могут содержать кабели или полоски с плоскими сторонами.
В корпусе 5703 катетера воплощена конструкция трубка в трубке, в которой внутренняя трубка 5803 с каналом 5804 расположена внутри внешней трубки 5802, и внутренняя трубка 5803 перемещается относительно внешней трубки 5802 для управления отклонением отклоняющегося элемента 5704 (например, так, как описано со ссылкой на фиг.5С и 5D). Внешняя трубка 5802 может включать в себя множество слоев, и провода 5801а-5801d могут быть размещены в пределах каналов провода управления, расположенных внутри слоев внешней трубки 5802.
В качестве альтернативы, отклонение отклоняющегося элемента 5704 может быть достигнуто путем поворота внутренней трубки 5803 относительно внешней трубки 5802 (например, таким образом, как описано со ссылкой на фиг.35А и 35В).
На фиг.59 показан вариант осуществления корпуса 5900 катетера, который может использоваться в системе 5700 формирования ультразвукового изображения вместо корпуса 5703 катетера. Корпус 5900 катетера включает в себя провода 5801а-5801d управления, для управления корпусом 5900 катетера аналогично тому, как описано со ссылкой на фиг.58. Вместо конструкции трубка в трубке по фиг.58, корпус 5900 катетера может включать в себя одну трубку 5902, и провода 5903а и 5903b управления, расположенные в ней, которые можно использовать для управления отклонением отклоняющегося элемента 5704. Провода 5903а и 5903b управления могут быть аналогичны по конструкции проводам 5801а-5801d управления. В других вариантах осуществления изобретения электропроводные элементы (например, гибкая схема или провода, соединенные с двигателем) могут быть расположены вдоль и/или внутри корпуса 5900 катетера и могут использоваться для управления отклонением отклоняющегося элемента 5704 (например, путем вытягивания и/или проталкивания таких электрических соединительных элементов). Корпус 5900 катетера может включать в себя канал 5904.
Любая другая соответствующая система для управления катетером может использоваться вместо 4-стороннего управления, показанного на фиг.58 и 59. Например, дополнительные провода управления (и соответствующие дополнительные элементы управления) могут использоваться, или меньшее количество проводов управления могут использоваться для управления катетером. Другие соответствующие типы систем управления могут использоваться, такие как электрически активируемые элементы (например, электрополимеры) и активируемые теплом элементы (например, содержащие материал с памятью формы).
Кроме того, любая другая соответствующая система для управления степенью отклонения отклоняющихся элементов может использоваться вместо системы трубка в трубке, или вместо проводов 5903а, 5903b управления, показанных на фиг.58 и 59, соответственно. Например, могут использоваться электрически активируемые элементы (например, электрополимеры) и/или активируемые теплом элементы (например, содержащие материал с памятью формы).
На фиг.60 и 61 показан дистальный конец 5712 катетера 5702. В представленном варианте осуществления изобретения, корпус катетера 5703 соединен с помощью шарнира 6001 с отклоняющимся элементом 5704 (с вырезанным участком для представления компонентов, находящихся внутри отклоняющегося элемента 5704). Как показано на фиг.60, одномерный массив 6002 преобразователей, двигатель 6003, держатель 6004 двигателя и элемент 6005 электрического соединения (который включает в себя участок 6006 часовой пружины) могут быть расположены внутри корпуса 6007 отклоняющегося элемента 5704. Отклоняющийся элемент 5704 и его компоненты подробно описаны со ссылкой на фиг.69А-69С. Следует отметить, что другие варианты осуществления отклоняющихся элементов и/или другие варианты осуществления структур, которые обеспечивают возможность отклонения различных других вариантов осуществления от элементов отклонения, могут быть установлены вместо отклоняющегося элемента 5704, и/или шарнира 6001, представленных на фиг.57, 60 и 61.
На фиг.61 показан отклоняющийся элемент 5704 в положении, где он развернут под углом приблизительно +90°, который обращен вперед относительно конца корпуса 5703 катетера. Только для пояснения, угловое значение (например, угол +90° отклонения, показанный на фиг.61), может использоваться здесь, для описания величины поворота отклоняющегося элемента относительно центральной оси корпуса катетера на расстояние от положения, где отклоняющийся элемент и корпус катетера выровнены. Положительное значение, в общем, используется для описания поворота, где отклоняющийся элемент перемещается таким образом, что он, по меньшей мере, частично обращен вперед (например, так, что массив ультразвуковых преобразователей внутри отклоняющегося элемента обращен вперед), и отрицательное значение, в общем, используется для описания поворота, куда отклоняющийся элемент перемещается таким образом, что он, по меньшей мере, частично обращен назад.
Для отклонения отклоняющегося элемента 5704 от положения, показанного на фиг.60, в положение, показанное на фиг.61, внутренняя трубка 5803 может быть продвинута вперед относительно внешней трубки 5802. В случае, когда отклоняющийся элемент 5704 привязан к внешней трубке 5703 с помощью тяги 6009, такое продвижение может привести к повороту отклоняющегося элемента 5704 в положительном направлении. Тяга 6009 может быть закреплена на отклоняющемся элементе 5704 на одном конце и к внешней трубке 5802 на другом конце. Тяга 6009 во время работы может предотвращать перемещение точек крепления тяги на расстояние друг от друга, большее, чем длина тяги 6009. При этом через тягу 6009 отклоняющийся элемент 5704 может быть взаимно соединен с ограничением с внешней трубкой 5802. Аналогично, в случае, когда тяга 6009 имеет адекватную жесткость, отвод внутренней трубки 5803 относительно внешней трубки 5802 из положения, показанного на фиг.60, может приводить к тому, что отклоняющийся элемент 5704 будет поворачиваться в отрицательном направлении.
Тяга 6009 может представлять собой отдельное устройство, первичная функция которого состоит в управлении отклонением отклоняющегося элемента 5704. В другом варианте осуществления изобретения тяга 6009 может представлять собой гибкую плату или другой компонент с множественным проводником, который, в дополнение к обеспечению функции тяги, электрически соединяет компоненты с отклоняющимся элементом 5704 (например, массивом 6002 преобразователей) с компонентами в корпусе 5703 катетера (например, аналогично элементу 104 электрического соединения по фиг.5Е) или в другом месте внутри системы 5700 формирования ультразвукового изображения. В другом варианте осуществления изобретения тяга 6009 может представлять собой провод или провода, используемые для электрического соединения одного или нескольких компонентов (например, датчиков, двигателя 6003) внутри отклоняющегося элемента 5704 с контроллером 5705 двигателя, ультразвуковой консолью 5706, и/или другим соответствующим компонентом системы 5700 формирования ультразвукового изображения.
На фиг.60 и 61 показана конфигурация, использующая пленочный шарнир 6001. Пленочный или гибкий шарнир представляет собой гибкий шарнир (шарнир на гибких подшипниках), изготовленный из гибкого или податливого материала, такого как полимер. Обычно пленочный шарнир соединяет две части вместе, обеспечивая для них возможность шарнирного поворота относительно друг друга вдоль линии изгиба шарнира. Пленочные шарниры обычно изготовляют путем инжекционного формования. Полиэтилены, полипропилены, полиуретаны или полиэфирблокамиды, такие как РЕВАХ® представляют собой возможные полимеры для пленочных шарниров, благодаря их устойчивости к усталости.
Шарнир 6001 обеспечивает возможность шарнирного движения между первым участком 6010 шарнира 6001 и вторым участком 6011 шарнира 6001. Два участка 6010, 6011 соединены вдоль линии 6012 шарнира и отклоняющийся элемент 5704, и внутренняя трубка 5803 двигаются относительно друг друга вокруг линии 6012 шарнира. В этом отношении, относительное движение между отклоняющимся элементом 5704 и внутренней трубкой 5803 ограничено нетрубчатым элементом. Это отличается от относительного движения между разными участками корпуса 5703 катетера, которые могут возникать в результате манипуляции с проводами 5801а-5801d для управления корпусом 5703 катетера, где относительное движение между разными участками корпуса 5703 катетера ограничено трубчатым элементом (например, путем сжатия и/или удлинения внешней трубки 5802 и/или внутренней трубки 5803).
Шарнир 6001 может представлять собой единую деталь, такую как одна отдельная сформованная часть. Кроме того, шарнир 6001 может находиться в непосредственном контакте с, и может быть прочно соединен с деталями, относительное движение которых требуется ограничить. При этом первый шарнирный участок 6010 может находиться в непосредственном контакте с и может быть прочно соединен с внутренней трубкой 5803, в то время как второй участок 6011 шарнира 6010 может находиться в непосредственном контакте с и может быть прочно соединен с отклоняющимся элементом 5704.
На фиг.62 показана вариация варианта осуществления изобретения, представленного на фиг.60 и 61. На фиг.62 тяга 6009 по фиг.60 и 61 заменена элементом 6013 активации, который включает в себя линию 6014 шарнира, таким образом, в одном варианте осуществления изобретения могут использовать два пленочных шарнира (шарнир 6001 с линией 6012 шарнира, и линия 6014 шарнира элемента 6013 активации), размещенные параллельно друг другу, и при этом натяжение растяжения приложено к одному, в то время как сжатие приложено к другому (например, в результате движения внутренней трубки 5803 относительно внешней трубки 5802), чтобы вызвать изгиб вдоль обеих линий 6012, 6014 шарнира в одном направлении. Путем чередования, какой элемент (шарнир 6001, элемент 6013 активации) находится в растяжении и сжатии, можно изменять на обратное направление изгиба. Шарнир 6001 может быть закреплен на внутренней трубке 5803 и может обеспечивать опору для отклоняющегося элемента 5704. Гибкая плата (не показана) может быть размещена между шарниром 6001 и элементом 6013 активации или снаружи от шарнира 6001 и элемента 6013 активации. Элемент 6013 активации может быть закреплен на отклоняющемся элементе 5704 и на внешней трубке 5802 корпуса 5703 катетера. В качестве альтернативы, элемент 6013 активации может включать в себя усиленную гибкую плату (не показана), которая может действовать как пленочный шарнир, а также как элемент электрического соединения между массивом 6002 преобразователей и электрическим проводником в корпусе 5703 катетера. По сравнению с вариантом осуществления изобретения по фиг.60 и 61, вариант осуществления изобретения по фиг.62 может обеспечивать относительно большой угол отклонения отклоняющегося элемента 5704 при относительно малом смещении между внешней трубкой 5802 и внутренней трубкой 5803.
Варианты осуществления катетеров, описанные здесь, также могут включать в себя один или несколько датчиков для определения пространственного расположения различных компонентов, которые могут быть вставлены в тело пациента. Например, во взаимодействии с обеспечением возможности формирования изображения (например, формирования 4D ультразвуковых изображений) в некоторых вариантах осуществления, соответствующим образом размещенные датчики могут обеспечить возможность точной идентификации пространственных положений (например, внутри сердечных камер) различных компонентов (или их частей) в соответствии с вариантами осуществления. Например, информация об относительном расположении, предоставляемая датчиками, облегчает направление более сложных процедур абляции, где электрическая активность сердца, обозначая цели лечения, может быть отображена на корпус катетера и положения отклоняющегося элемента.
Примерное воплощение таких датчиков представлено на фиг.60 и 61, где датчик 6008а, размещенный на дистальном конце отклоняющегося элемента 5704, может использоваться для точной идентификации пространственного положения и угловой ориентации отклоняющегося элемента 5704 (например, когда он расположен внутри сердечной камеры пациента). Аналогично, как показано на фиг.60 и 61, необязательный второй датчик 6008b, размещенный на дистальном конце корпуса 5703 катетера, может использоваться для точной идентификации пространственного положения корпуса 5703 катетера. Использование двух датчиков обеспечивает возможность полностью определить ориентацию корпуса 5703 катетера относительно отклоняющегося элемента 5704. Датчики 6008а, 6008b могут представлять собой датчики с шестью степенями свободы (DOF), которые обладают возможностью точного указания относительного положения устройства с высокой степенью точности. Последние достижения в конструкции датчиков позволили уменьшить размер таких датчиков до диаметра приблизительно 0,94 мм (2,8 Fr). Этот профиль обеспечивает возможность для этих датчиков установки внутри профиля варианта осуществления катетера, с диаметром, например, от 9 до 10 Fr. Такие 3-D направляющие датчики поставляет Ascension Technology Corporation, Burlington, VT, USA.
На фиг.63А-63D показан пленочный шарнир 6001 по фиг.60-62, изолированный от катетера 5702. Первый участок 6010 пленочного шарнира 6001 выполнен трубчатым для его стыковки с внутренней трубкой 5803. В альтернативных конфигурациях первый участок 6010 может иметь такие размеры, чтобы он стыковался с внешней стенкой дистального конца корпуса катетера или с любым другим соответствующим участком корпуса катетера. Первый участок 6010 может иметь такие размеры, чтобы участок корпуса катетера можно было обернуть вокруг внешней поверхности первого участка 6010 для закрепления первого участка 6010 на корпусе катетера. Первый участок 6010 может включать в себя канал 6202, который может обеспечивать доступ к каналу корпуса катетера (например, каналу 5804 по фиг.58), к которому прикреплен первый участок 6010.
Второй участок 6011 пленочного шарнира 6001 может быть полукруглым по форме и может быть выполнен с возможностью стыка с отклоняющимся элементом, таким как отклоняющийся элемент 5704 по фиг.60-62, или другим соответствующим элементом. Второй участок 6011 может включать в себя конечную стенку 6203, которая может взаимно соединяться с отклоняющимся элементом любым соответствующим образом. Например, конечная стенка 6203 может взаимно соединяться с отклоняющимся элементом, используя клей, сварку, штифты, крепления или любую их комбинацию. Участки отклоняющегося элемента могут быть сформованы поверх или сформированы на или над вторым участком 6011.
Второй участок 6011 может сужаться до заданной толщины на линии 6012 шарнира для достижения требуемой прочности шарнира, при одновременном достижении требуемого уровня сопротивления изгибу.
Пленочный шарнир 6001 может включать в себя сглаженную область 6204, расположенную вдоль внешней поверхности пленочного шарнира 6001. Сглаженная область 6204 может иметь такие размеры, чтобы принимать гибкую плату или другой элемент электрического соединения, который может соединять электрические проводники в корпусе катетера с электрическими компонентами в отклоняющемся элементе. Пленочный шарнир 6001 может включать в себя уклон 6205, который может обеспечить зазор для элемента электрического соединения, для пропуска его в прикрепленный отклоняющийся элемент, не создавая острые углы, с которыми может войти в контакт элемент электрического соединения, когда отклоняющийся элемент отклоняется.
На фиг.64А-64С показан вариант осуществления катетера 6400, который включает в себя расположенный в центре пленочный шарнир 6401, который расположен между дистальным концом 6402 корпуса 6403 катетера и отклоняющимся элементом 6404. Отклоняющийся элемент 6404 может содержать массив преобразователей (например, фиксированный одномерный массив, шарнирно поворачивающийся одномерный массив, двумерный массив), выполненный с возможностью формирования изображений плоскости, или объема 6405 (представлен схематично), которая расположена проксимально к отклоняющемуся элементу 6404.
Как показано на фиг.64В и 64С, отклоняющийся элемент 6404 может иметь общий диапазон движений, по меньшей мере, приблизительно 200°. На фиг.64В показан отклоняющийся элемент 6404, отклонившийся приблизительно на +100° от выровненного положения (фиг.64А), и на фиг.64С показан отклоняющийся элемент 6404, отклонившийся приблизительно на -100° от выровненного положения. Такой диапазон движений достигается путем перемещения внешней трубки 6406 корпуса 6403 катетера относительно внутренней трубки 6407. Тяга 6408 взаимно соединена с внешней трубкой 6406 и отклоняющимся элементом 6404. Тяга 6408 может быть ограничена элементом 6409 ограничения таким образом, что участок тяги 6408 остается проксимальным к дистальному концу 6402.
В соответствии с этим, когда внешняя трубка 6406 движется проксимально относительно внутренней трубки 6407, как показано на фиг.64В, тяга 6408 вытягивает проксимально отклоняющийся элемент 6404, обеспечивая его шарнирный поворот в положительном направлении. Аналогично, когда внешняя трубка 6406 перемещается дистально относительно внутренней трубки 6407, как показано на фиг.64С, тяга 6408 проталкивает дистально отклоняющийся элемент 6404, обеспечивая его шарнирный поворот в отрицательном направлении. Тяга 6408 должна обладать соответствующей жесткостью для обеспечения возможности проталкивания с ее помощью отклоняющегося элемента 6404 в отрицательном направлении. Тяга 6408 может быть изготовлена с любой соответствующей гибкостью и конфигурацией, с тем чтобы она могла принимать требуемую форму, такую как гибкая нажимная планка или материал с памятью формы. В одном варианте осуществления изобретения тяга 6408 может представлять собой гибкую плату или другой элемент электрического соединения, который также используется для электрического соединения отклоняющегося элемента 6404 с корпусом 6403 катетера. В такой конфигурации гибкая плата может быть усилена для достижения адекватной жесткости.
В альтернативном варианте осуществления изобретения корпус 6403 катетера может быть выполнен из одной трубки, и тяга 6408 может представлять собой провод проталкивания/вытягивания, активируемый пользователем катетера 6400. В таком варианте осуществления изобретения пользователь может вытягивать провод проталкивания/вытягивания для вытягивания отклоняющегося элемента 6404 в положительном направлении, как показано на фиг.64В, и может проталкивать провод проталкивания/вытягивания, для проталкивания отклоняющегося элемента 6404 в отрицательном направлении, как показано на фиг.64С.
На фиг.64D показан катетер 6410, который представляет собой вариант катетера 6400. Катетер 6410 включает в себя расположенный центрально пленочный шарнир 6411, установленный между дистальным концом 6412 корпуса 6413 катетера и отклоняющимся элементом 6414. Отклоняющийся элемент 6414 может содержать массив 6415 преобразователей (например, фиксированный одномерный массив, поворотный одномерный массив, двумерный массив), который выполнен с возможностью формирования изображений плоскости или объема 6416 (представлен схематично), который расположен проксимально к отклоняющемуся элементу 6414.
Катетер 6410 может иметь общий диапазон движений, сравнимый с представленным в отношении катетера 6400 (например, по меньшей мере, приблизительно 200°). Катетер 6410 может включать в себя первый элемент 6417 активации и второй элемент 6418 активации, который может использоваться для отклонения отклоняющегося элемента 6414. Первый и второй элементы 6417, 6418 активации могут быть выполнены в виде проводов. Первый и второй элементы 6417, 6418 активации могут продолжаться вдоль длины корпуса 6413 катетера до точки, где пользователь, работающий с катетером 6410, может иметь возможность избирательно вытягивать любой из элементов 6417, 6418 активации, для управления отклонением отклоняющегося элемента 6414.
Первый элемент 6417 активации может быть закреплен на отклоняющемся элементе 6414 в первой точке 6419 крепления, которая расположена на стороне отклоняющегося элемента 6414, противоположной от передней стороны массива 6415 преобразователей. При этом вытягивание первого элемента 6417 активации может привести к тому, что отклоняющийся элемент 6414 начнет поворачиваться в положительном направлении (вверх, как показано на фиг.64D). Второй элемент 6418 активации может быть закреплен на отклоняющемся элементе 6414 во второй точке 6420 крепления, которая расположена с той же стороны отклоняющегося элемента 6414, что и передняя сторона массива 6415 преобразователей. Вытягивание второго элемента 6418 активации может привести к тому, что отклоняющийся элемент начнет поворачиваться в отрицательном направлении (вниз, как показано на фиг.64D).
Элемент 6421 электрического соединения может быть пропущен через расположенный центрально пленочный шарнир 6411. Элемент 6421 электрического соединения может, например, включать в себя гибкую плату.
На фиг.65А-65Е показан вариант осуществления катетера 6500, который включает в себя расположенный центрально шарнир 6501, помещенный между дистальным концом 6502 корпуса 6503 катетера и отклоняющимся элементом 6504. Отклоняющийся элемент 6504 может содержать массив преобразователей (например, фиксированный одномерный массив, шарнирно поворачивающийся одномерный массив, двумерный массив), выполненный с возможностью формирования изображений плоскости, или объема 6505 (представлен схематично), который расположен проксимально отклоняющемуся элементу 6504.
Как показано на фиг.65В-65Е, отклоняющийся элемент 6504 может иметь общий диапазон движений приблизительно 360°. На фиг.65С показан отклоняющийся элемент 6504, отклонившийся приблизительно на +180° от выровненного положения (фиг.65А), и на фиг.65Е показан отклоняющийся элемент 6504, отклонившийся приблизительно на -180° от выровненного положения. Такой диапазон движений достигается путем смещения внешней трубки 6506 корпуса 6503 катетера относительно внутренней трубки 6507. Тяга 6508 взаимно соединена с внешней трубкой 6506 и отклоняющимся элементом 6504.
Для достижения 360° движения отклоняющегося элемента 6504, шарнир 6501 может иметь общую длину, по меньшей мере, равную сумме половины диаметра отклоняющегося элемента 6504 и половины диаметра корпуса 6503 катетера (например, приблизительно расстояние между центральными линиями корпуса 6503 катетера и отклоняющимся элементом 6504). В представленном варианте осуществления изобретения, в случае, когда шарнир 6501 представляет собой одиночный изгибающийся элемент, который, в общем, изгибается равномерно, когда отклоняется отклоняющийся элемент 6504, длина шарнира 6501 может составлять приблизительно половину внешней окружности отклоняющегося элемента 6504 для обеспечения достижения шарниром 6501 положения, показанного на фиг.65С и 65Е.
В альтернативной конфигурации, показанной на фиг.65F, шарнир 6501 может представлять собой относительно жесткий элемент 6510 с двумя пленочными шарнирами 6511, 6512, расположенными вдоль его длины. Расстояние между этими двумя шарнирами 6511, 6512 может быть равно приблизительно расстоянию между центральными линиями корпуса 6503 катетера и отклоняющимся элементом 6504, когда он установлен, как показано на фиг.65F. В другой альтернативе (не показана) шарнир 6501 может включать в себя одиночный пленочный шарнир с оставшимися участками шарнира 6501, достаточно податливыми, чтобы обеспечить движение на положительный или отрицательный угол 180° с помощью отклоняющегося элемента 6504.
В вариантах осуществления изобретения, показанных на фиг.65А-65F, когда внешняя трубка 6506 перемещается проксимально относительно внутренней трубки 6507, как показано на фиг.65В, 65С и 65F, тяга 6508 проталкивает проксимальной отклоняющийся элемент 6504, обеспечивая его отклонение в положительном направлении. Передвижение внешней трубки 6506 проксимально на первое расстояние может отклонять отклоняющийся элемент 6504 в направление, обращенное вперед, как показано на фиг.65 В. Продолжая двигать внешнюю трубку, проксимально отклоняющийся элемент 6504 может переместиться в положение, обращенное в сторону, как показано на фиг.65С и 65F. Аналогично, отклоняющийся элемент 6504 может быть перемещен в положение заднего обзора (фиг.65D) или положение, обращенное в сторону (фиг.65Е) путем перемещения внешней трубки 6506 дистально относительно внутренней, трубки 6507.
Тяга 6508 должна обладать соответствующей жесткостью для обеспечения проталкивания ее отклоняющегося элемента 6504 в отрицательном направлении, показанном на фиг.65D и 65Е. Тяга 6508 может быть изготовлена с любой соответствующей гибкостью и конфигурацией с тем, чтобы она имела требуемую форму, такую как у гибкой нажимной планки, или из материала с памятью формы. В одном варианте осуществления изобретения тяга 6508 может представлять собой гибкую плату или другой элемент электрического соединения, который также используется для электрического соединения отклоняющегося элемента 6504 с корпусом 6503 катетера. В такой конфигурации гибкая плата может быть усилена для достижения требуемой жесткости.
Оболочку или любой другой механический держатель (не показан) можно использовать для закрепления отклоняющегося элемента 6504 в выровненном положении, показанном на фиг.65А, в то время как катетер 6500 перемещается в теле пациента. После установки положения оболочка или другой механический держатель может быть удалена (например, отведена) для обеспечения возможности отклонения отклоняющегося элемента.
На фиг.66А-66Е показан вариант осуществления катетера 6600, который включает в себя расположенный в центре шарнир 6601, расположенный между дистальным концом 6602 корпуса 6603 катетера и отклоняющимся элементом 6604. Отклоняющийся элемент 6604 может содержать массив преобразователей (например, закрепленный одномерный массив, поворотный одномерный массив, двумерный массив), выполненный с возможностью формирования изображений плоскости, или объема 6605 (представлен схематично), расположенного проксимально к отклоняющемуся элементу 6604.
Как показано на фиг.66В-66Е, отклоняющийся элемент 6604 может иметь общий диапазон движений, по меньшей мере, приблизительно 270°. На фиг.66С показан отклоняющийся элемент 6604, отклонившийся приблизительно на +135° от выровненного положения (фиг.66А), и на фиг.66Е показан отклоняющийся элемент 6604, отклонившийся приблизительно на -135° от его выровненного положения. Этот диапазон движений достигается путем манипуляции с первым элементом 6606 активации и/или вторым элементом 6607 активации. Элементы 6606 и 6607 активации могут быть представлены, например, в форме вытяжных проводов. Первый и второй элементы 6606, 6607 активации могут продолжаться вдоль длины корпуса 6603 катетера к точке, где пользователь, выполняющий операции с катетером 6600, может иметь возможность избирательно потянуть любой элемент 6606, 6607 активации для управления отклонением отклоняющегося элемента 6604.
Первый элемент 6606 активации может быть зафиксирован на отклоняющемся элементе 6604, на стороне отклоняющегося элемента 6604, противоположной от передней стороны массива преобразователей. При этом вытягивание первого элемента 6606 активации может привести к повороту отклоняющегося элемента 6604 в положительном направлении (вверх, как показано на фиг.66В). При этом отклоняющийся элемент 6604 может поворачиваться для достижения требуемого угла, такого как обращенный вперед на+90° (фиг.66В) или положительный угол 135° (фиг.66С). Такое смещение через вытягивание первого элемента 6606 активации может сопровождаться ослаблением натяжения или не подачей второго элемента 6607 активации, чтобы более длинный участок второго элемента 6607 активации был расположен дистально к дистальному концу 6602, когда отклоняющийся элемент 6604 смещается в положительном направлении, как показано на фиг.66В и 66С.
Второй элемент 6607 активации может быть закреплен на отклоняющемся элементе 6604 с той же стороны отклоняющегося элемента 6604, что и передняя сторона массива преобразователей. При этом вытягивание второго элемента 6607 активации может привести к тому, что отклоняющийся элемент 6604 будет поворачиваться в отрицательном направлении (вниз, как показано на фиг.66D). При этом отклоняющийся элемент 6604 может поворачиваться для достижения требуемого угла, например обращенный вперед -90° (фиг.66D) или -135° (фиг.66Е). Такие смещения могут сопровождаться соответствующей подачей первого элемента 6606 активации, аналогично описанному выше со ссылкой на положительное смещение.
Катетер 6600 включает в себя элемент электрического соединения (не показан) для электрического соединения элемента 6604 отклонения с проводниками, продолжающимися вдоль корпуса катетера 6603. Такой элемент электрического соединения может быть выполнен в форме гибкой платы.
Шарнир 6601 может включать в себя штифт 6608, и отклоняющийся элемент 6604 может поворачиваться относительно дистального конца 6602 вокруг центральной оси штифта 6608. Штифт 6608 может, например, быть выполнен как единая деталь с, или может быть запрессован в соответствующее отверстие отклоняющегося элемента 6604 таким образом, что штифт 6608 будет закреплен на отклоняющемся элементе 6604. Штифт 6608 может быть установлен внутри отверстия на дистальном конце 6602 таким образом, что он может свободно вращаться в отверстии, когда отклоняющий элемент 6604 поворачивается относительно дистального конца 6602. При этом шарнир 6601 может включать в себя пару поверхностей (например, внешнюю поверхность штифта 6608 и внутреннюю поверхность отверстия на дистальном конце 6602), которые могут скользить относительно друг друга для обеспечения отклонения отклоняющегося элемента 6604. Любой другой соответствующий шарнир, включая в себя шарнир, в котором штифт 6608 зафиксирован на дистальном конце 6602 и может свободно поворачиваться относительно отклоняющегося элемента 6604, может использоваться вместо описанного шарнира 6608.
Варианты осуществления изобретения, показанные на фиг.64А-64С и 65А-65F, представлены с использованием одной тяги 6408, 6408 и активация типа трубка в трубке приводит к отклонению соответствующих отклоняющихся элементов. Каждый вариант осуществления, показанный на фиг.64D и 66А-66Е, иллюстрирует использование двух элементов 6417, 6418, 6606, 6607 активации для обеспечения отклонения соответствующих отклоняющихся элементов. Такие компоновки предназначены только для иллюстрации, и любая соответствующая система управления отклонением может использоваться с любой соответствующей компоновкой шарнира. Например, система активации типа трубка в трубке с одной тягой может использоваться в варианте осуществления шарнира по фиг.66А-66Е, в то время как системы в двумя элементами активации могут использоваться в варианте осуществления по фиг.65А-65F.
На фиг.67 показан катетер 6700, который включает в себя внутренний трубчатый корпус 6701 и внешний трубчатый корпус 6702. На внутреннем трубчатом корпусе 6701 закреплен пленочный шарнир 6705, аналогичный пленочному шарниру 6001. На пленочном шарнире 6705 прикреплен отклоняющийся элемент 6704. Отклоняющийся элемент 6704 может содержать массив преобразователей (например, фиксированный одномерный массив, шарнирно поворачивающийся одномерный массив, приводимый в движение двигателем, двумерный массив), выполненный с возможностью формирования изображений плоскости или объема 6706 (представлен схематично), расположенного проксимально отклоняющемуся элементу 6704.
Катетер 6700 может дополнительно включать в себя трубчатую тягу 6707. Трубчатая тяга 6707 может представлять собой отрезок усадочной трубки (например, усадочной трубки из фторированного этиленпропилена (FEP)), или другой соединительной трубки с участком 6708, удаленным таким образом, чтобы область 6710 трубчатой тяги 6707, расположенная проксимально к линии 6709 шарнира пленочного шарнира 6705 не была трубчатой и могла действовать, как тяга (например, аналогично тяге 6009 на фиг.61). Трубчатая тяга 6707 может быть закреплена на внешнем трубчатом корпусе 6702 в области 6711, на дистальном конце внешнего трубчатого корпуса 6702 путем приложения тепла, для того, чтобы выполнить усадку усадочной трубки, или с применением клея и, таким образом, становится закрепленной на внешнем трубчатом корпусе 6702. Кроме того, трубчатая тяга 6707 может быть закреплена на отклоняющемся элементе 6704 в области 6712 путем применения тепла, для того, чтобы вызвать усадку усадочной трубки, или применения клея и, таким образом, становиться закрепленной на отклоняющемся элементе 6704.
Трубчатая тяга 6707 функционирует для того, чтобы обеспечить шарнирный поворот отклоняющегося элемента 6704 в положительном направлении (например, вверх, как показано на фиг.67) относительно внутреннего трубчатого корпуса 6701, когда внутренний трубчатый корпус 6701 движется дистально (например, вправо на фиг.67) относительно внешнего трубчатого корпуса 6702. При этом область 6710 трубчатой тяги 6707 выполняет аналогичную функцию, что и тяга 6009 фиг.61. Трубчатая тяга 6707 также может обеспечивать шарнирный поворот отклоняющегося элемента 6704 в отрицательном направлении (например, вниз, как показано на фиг.67), когда внутренний трубчатый корпус 6701 движется проксимально (например, влево на фиг.67) относительно внешнего трубчатого корпуса 6702. Любая соответствующая схема электрического соединения, такая как описана здесь, может использоваться с катетером 6700 фиг.67.
На фиг.68 показан вариант осуществления электрического соединения между спирально расположенным элементом 6801 электрического соединения и гибкой платой 6802 (гибкий/изгибающийся элемент электрического соединения). Элемент 6801 электрического соединения спирально намотан вокруг участка корпуса 6803 катетера. Дополнительные слои корпуса 6803 катетера, расположенные поверх спирально размещенного элемента 6801 электрического соединения, не показаны на фиг.68. Корпус 6803 катетера шарнирно взаимно соединен с отклоняющимся элементом 6804 через шарнир 6805. Отклоняющийся элемент 6804 и шарнир 6805 могут быть аналогичны любому соответствующему элементу и шарниру, описанному здесь. Отклоняющийся элемент 6804 может содержать массив преобразователей, выполненный с возможностью формирования изображений плоскости или объема.
Гибкая плата 6802 может иметь участок 6806 соединения, где проводники на гибкой плате 6802 размещены через промежуток так, чтобы совпадать с промежутком проводников на элементе 6801 электрического соединения. На участке 6806 соединения электропроводные участки (например, дорожки, проводящие полоски) гибкой платы 6802 могут быть взаимно соединены с электропроводными участками (например, проводами) элемента 6801 электрического соединения. Такое электрическое взаимное соединение может быть достигнуто путем отслоения или удаления некоторой части изолирующего материала с элемента 6801 электрического соединения и формирования контакта открытых электропроводных участков с соответствующими открытыми электропроводными участками на гибкой плате 6802.
Как показано на фиг.68, гибкая плата 6802 может содержать сгибаемую или изгибающуюся область 6807, которая имеет более узкую ширину, чем ширина участка 6806 соединения. Следует понимать, что ширина каждой отдельной электропроводной дорожки через изгибающуюся область 6807 может быть меньшей, чем ширина каждого электропроводного элемента на участке 6806 соединения. Кроме того, шаг между каждым электропроводным элементом в изгибающейся области 6807 может быть меньшим, чем шаг участка 6806 соединения. Изгибающаяся область 6807 может быть взаимно соединена с массивом преобразователей (не показан) внутри отклоняющегося элемента 6804.
Как показано на фиг.68, изгибающаяся область 6807 гибкой платы 6802 во время работы может изгибаться во время отклонения отклоняющегося элемента 6804. При этом изгибающаяся область 6807 может изгибаться в ответ на отклонение отклоняющегося элемента 6804. Отдельные проводники элемента 6801 электрического соединения могут оставаться в электрическом соединении с отдельными преобразователями массива преобразователей во время отклонения отклоняющегося элемента 6804. Кроме того, изгибающаяся область 6807 гибкой платы 6802 во время работы может действовать, как тяга таким образом, что, когда внутренняя трубка 6808 продвигается относительно внешней трубки 6809, изгибающаяся область 6807, из-за ее фиксированной длины между внешней трубкой 6809 и отклоняющимся элементом 6804, обеспечивает шарнирный поворот отклоняющегося элемента 6804 в положительном направлении, как показано на фиг.68. Дополнительные проводники, такие как проводники, взаимно соединенные с двигателем или датчиками в отклоняющемся элементе 6804, могут продолжаться между корпусом 6803 катетера и отклоняющимся элементом 6804. Такие проводники могут быть расположены таким образом, что они не натягиваются и не используются как тяга, когда отклоняющийся элемент 6804 шарнирно поворачивается.
Элемент 6801 электрического соединения может содержать элементы, которые продолжаются от дистального конца до проксимального конца корпуса 6803 катетера, или элемент 6801 электрического соединения может содержать множество дискретных, последовательно взаимно соединенных элементов, которые вместе продолжаются от дистального конца до проксимального конца корпуса 6803 катетера. В одном варианте осуществления изобретения гибкая плата 6802 может включать в себя элемент 6801 электрического соединения. В таком варианте осуществления изобретения гибкая плата 6802 может иметь спирально намотанный участок, продолжающийся от дистального конца до проксимального конца корпуса 6803 катетера. В таком варианте осуществления изобретения может не требоваться взаимное электропроводное соединение (например, между гибкой платой 6802 и плоским кабелем) между изгибающейся областью 6807 и проксимальным концом корпуса 6803 катетера.
В варианте конфигурации электрических соединений, показанном на фиг.68, могут использоваться отдельные (например, не построенные из последовательности элементов, впоследствии взаимно соединенных друг с другом) элементы электрического соединения, которые продолжаются от проксимального конца корпуса 6803 катетера или далее (например, продолжаются до соединения внутри с ультразвуковой консолью 5706) постоянно до электрического соединения с массивом преобразователей, расположенным внутри отклоняющегося элемента 6804.
В первом варианте осуществления изобретения одиночный элемент электрического соединения может представлять собой гибкую плату или гибкую цепь. Пример маршрута, по которому может следовать такая гибкая цепь, может представлять собой движение от проксимального конца катетера (или далее), поворот под углом, для того, чтобы обеспечить возможность намотки на стенку корпуса катетера, снова поворот на дистальном конце корпуса катетера для того, чтобы обеспечить прямой выход через шарнир, поворот под углом 90° для намотки, как часовая пружина внутри отклоняющегося элемента (например, для того, чтобы обеспечить возможность возвратно-качательного шарнирного движения массива преобразователей), и затем поворот еще на угол 90° для пропуска позади массива преобразователей и соединения с ним. В варианте гибкая цепь может перемещаться далее до внутреннего участка корпуса катетера вместо ее намотки на стенке корпуса катетера.
Гибкая цепь такой длины может быть изготовлена из листа, где проводники уложены в структуре вперед и назад. Лист может быть затем разрезан таким образом, что проводящая полоска будет выполнена в виде структуры гармошки. Проводящая полоска может быть затем согнута на каждом изгибе для формирования, по существу, прямого одиночного элемента электрического соединения (кроме конечных элементов, для размещения отклоняющегося элемента и/или соединения с ультразвуковой консолью 5706) требуемой длины.
Такая конфигурация одиночной гибкой цепи может использоваться с любым соответствующим вариантом осуществления, описанным здесь.
Во втором варианте осуществления изобретения одиночный элемент электрического соединения может представлять собой ленточный кабель, такой как GORE™ Micro-Miniature Ribbon Cable. Такой кабель может быть направлен от проксимального конца катетера (или далее), до внутреннего участка корпуса катетера, и может продолжаться через шарнир и затем может быть закреплен позади массива. В таком варианте осуществления изобретения удаленная объединительная панель может быть удалена, для повышения гибкости ленточного кабеля в определенных областях, такой как на шарнире и/или внутри отклоняющегося элемента. Для дополнительного повышения гибкости отдельные проводники ленточного кабеля могут быть разделены в этих областях. Пример ленточного кабеля, где отдельные проводники отделены в области шарнира, представлен на фиг.50.
В альтернативной компоновке второго варианта осуществления изобретения отдельные проводники могут быть разделены проксимально шарниру и могут оставаться разделенными постоянно до массива преобразователей, который расположен внутри отклоняющегося элемента (аналогично компоновке "несоединенных проводников", как описано со ссылкой на фиг.50).
Такая конфигурация одиночного ленточного кабеля может использоваться с любым соответствующим вариантом осуществления изобретения, описанным здесь.
На фиг.69А-69С показаны виды с частичным поперечным сечением отклоняющегося элемента 6900, который может быть соединен с любым соответствующим шарниром и корпусом катетера, описанным здесь. Например, конечная стенка 6901 отклоняющегося элемента 6900 может быть фиксированно взаимно соединена с конечной стенкой 6203 шарнира 6001. Отклоняющийся элемент 6900 может, в общем, иметь размеры и форму для вставки в тело пациента и с последующим формированием изображений внутреннего участка пациента. Отклоняющийся элемент 6900 может включать в себя дистальный конец 6902.
Отклоняющийся элемент 6900 может включать в себя корпус 6903. Корпус 6903 может представлять собой относительно жесткий элемент, в котором установлен двигатель 6904, и массив 6905 преобразователей, причем оба описаны ниже. Отклоняющийся элемент 6900 может включать в себя центральную ось 6906.
Элемент 6907 электрического соединения может быть частично расположен внутри отклоняющегося элемента 6900. Элемент 6907 электрического соединения может включать в себя первый участок 6908, расположенный за пределами корпуса 6903 (частично показан на фиг.69А и 69 В). Первый участок 6908 элемента 6907 электрического соединения во время работы может электрически соединять элементы внутри отклоняющегося элемента 6900 с электрическими проводниками в катетере, с которыми соединен отклоняющийся элемент 6900 (например, так, как описано со ссылкой на гибкую плату 6802 на фиг.68). Первый участок 6908 также может использоваться, как тяга.
Корпус 6903 может быть герметизирован, и замкнутый объем может быть определен с помощью корпуса 6903 и конечной стенки 6901. Замкнутый объем может быть заполнен жидкостью. Массив 6905 преобразователей и ассоциированная подкладка могут быть аналогичны массиву 5307 преобразователей и ассоциированной подкладке 5328, которые были описаны со ссылкой на фиг.53. Корпус 6903 может включать в себя акустическое окно (не показано), аналогичное акустическому окну 5326, описанному со ссылкой на фиг.53.
Как показано на фиг.69С, корпус 6903 может иметь, в общем, круглое поперечное сечение. Кроме того, внешняя поверхность корпуса 6903 может быть гладкой. Такой гладкий, круглый внешний профиль может способствовать снижению формирования тромбов и/или повреждению ткани, по мере перемещения отклоняющегося элемента 6900 (например, когда его поворачивают, перемещают) внутри тела пациента.
Обычно изображения, генерируемые отклоняющимся элементом 6900, могут представлять собой изображения субъекта (например, внутренней структуры пациента) в пределах объема изображения, аналогичного объему 5327 изображения, который был описан со ссылкой на фиг.53. Массив 6905 преобразователей может быть расположен на механизме, который во время работы возвратно-качательно шарнирно поворачивает массив 6905 преобразователей вокруг центральной оси 6906, или оси, параллельной центральной оси 6906, таким образом, что плоскость изображения сканируют вокруг центральной оси 6906, или оси, параллельной центральной оси 6906, для формирования объема изображения. При этом отклоняющийся элемент 6900 может использоваться в системе (например, в системе 5700 формирования ультразвукового изображения) для отображения в реальном или близком к реальному видеоизображению объема изображения.
Массив 6905 преобразователей может быть взаимно соединен на дистальном конце с выходным валом двигателя 6904. Кроме того, массив 6905 преобразователей может поддерживаться на проксимальном конце массива 6905 преобразователей с помощью шарнира 6910. Стык между шарниром 6910 и массивом 6905 преобразователей может обеспечивать для массива 6905 преобразователей возвратно-поступательный шарнирный поворот вокруг его оси вращения, предотвращая, по существу, любое поперечное движение массива 6905 преобразователей относительно корпуса 6903. В соответствии с этим массив 6905 преобразователей может во время работы возвратно-качательно поворачиваться вокруг его оси вращения.
Двигатель 6904 может быть расположен на дистальном конце 6902 отклоняющегося элемента 6900. Двигатель 6904 может представлять собой двигатель с электрическим питанием, который во время работы избирательно поворачивает массив 6905 преобразователей, как в направлении по часовой стрелке, так и в направлении против часовой стрелки. При этом двигатель 6904 во время работы может возвратно-качательно поворачивать массив 6905 преобразователей.
Двигатель 6904 может быть фиксированно установлен на держателе 6911 двигателя, который, в свою очередь, фиксированно расположен относительно корпуса 6903. Держатель 6911 двигателя может быть взаимно соединен с двигателем 6904 на месте или рядом с местом, где выходной вал двигателя 6904 взаимно соединен с массивом 6905 преобразователей. Электрические соединения с двигателем 6904 могут быть выполнены через специализированный набор электрических соединений (например, проводов), отдельных от элемента 6907 электрического соединения.
Элемент 6907 электрического соединения может быть закреплен таким образом, что участок его будет закреплен относительно корпуса 6903. Элемент 6907 электрического соединения включает в себя второй участок 6909, расположенный на дистальном конце
6902 отклоняющегося элемента 6900 и во время работы может обеспечить возможность возвратно-качательного движения массива 6905 преобразователей. Элемент 6907 электрического соединения дополнительно включает в себя третий участок 6912, расположенный вдоль корпуса 6903, и во время работы электрически соединяющий первый участок 6908 со вторым участком 6909.
Третий участок 6912 элемента 6907 электрического соединения может быть закреплен таким образом, что, по меньшей мере, участок его закреплен относительно корпуса 6903. Третий участок 6912 элемента 6907 электрического соединения может быть закреплен на корпусе 6903 в области, соответствующей положению массива 6905 преобразователей. При этом третий участок 6912 элемента 6907 электрического соединения может быть расположен таким образом, чтобы он не мешал возвратно-качательному движению массива 6905 преобразователей. Любой соответствующий способ крепления третьего участка 6912 элемента 6907 электрического соединения на корпусе 6903 может использоваться. Например, может использоваться клей.
Второй участок 6909 элемента 6907 электрического соединения во время работы поддерживает электрическое соединение с массивом 6905 преобразователей, в то время как массив 6905 преобразователей шарнирно поворачивается. Это может быть достигнуто путем намотки в виде витков второго участка 6909 элемента 6907 электрического соединения вокруг двигателя 6904 в области, дистальной к держателю 6911 двигателя. При этом элемент 6907 электрического соединения может быть намотан вокруг оси, выровненной с осью выходной вращения двигателя 6904. Один конец второго участка 6909 элемента 6907 электрического соединения может быть закреплен на корпусе 6903, и другой конец 6913 второго участка 6909 элемента 6907 электрического соединения может быть электрически соединен с массивом 6905 преобразователей (через подкладку массива).
Второй участок 6909 элемента 6907 электрического соединения может иметь, в общем, плоское поперечное сечение и может быть расположен таким образом, что верхняя или нижняя сторона второго участка 6909 будет обращена и будет обернута вокруг центральной оси 6906. Второй участок 6909 элемента 6907 электрического соединения может быть намотан в виде катушки в компоновке типа "часовой пружины", где, как показано на фиг.69А-69С, по существу, полностью второй участок 6909 элемента 6907 электрического соединения расположен в той же точке вдоль центральной оси 6906.
Один конец часовой пружины второго участка 6909 элемента 6907 электрического соединения может быть электрически соединен на третьем участке 6912, в то время как другой конец 6913 может быть электрически соединен с массивом 6905 преобразователей (через подкладку массива). Часовая пружина второго участка 6909 может состоять из частичной катушки или любого соответствующего количества витков.
Аналогично вариантам осуществления изобретения по фиг.53 и 55, путем намотки типа часовой пружины второго участка 6909 элемента 6907 электрического соединения (например, вокруг оси параллельно центральной оси 6906), нежелательный противодействующий крутящий момент, воздействующий при шарнирном повороте массива 6905 преобразователей, может быть в существенной степени исключен. В этом отношении, шарнирное отклонение массива 6905 преобразователей вокруг центральной оси 6906 в такой конфигурации может привести к незначительному стягиванию или незначительному ослаблению витков часовой пружины второго участка 6909 элемента 6907 электрического соединения. Такое незначительное стягивание и ослабление могут привести к тому, что в каждом витке происходит только небольшое поперечное смещение и соответствующее смещение жидкости.
Часовая пружина второго участка 6909 и другие компоновки часовой пружины, описанные здесь, могут обеспечивать улучшенную долговечность по сравнению с конфигурацией, где электрическое взаимное соединение повернуто вдоль его длины. Часовая пружина второго участка 6909 и другие компоновки часовой пружины, описанные здесь, могут быть выполнены таким образом, что, когда массив 6905 преобразователей расположен в центре его требуемого диапазона движения, часовая пружина второго участка 6909 прикладывает незначительный крутящий момент или не прикладывает крутящий момент к массиву 6905 преобразователей. В такой конфигурации, когда двигатель 6904 перемещает массив 6905 преобразователей из центрального положения, часовая пружина второго участка 6909 может передать крутящий момент массиву 6905 преобразователей, который отклоняет массив 6905 преобразователей назад в направлении положения центра. Такой крутящий момент, переданный массиву 6905 преобразователей, может быть выбран минимальным, или он может быть выбран так, чтобы способствовать двигателю 6904 при возврате массива 6905 преобразователей в центральное положение. В другой компоновке часовая пружина второго участка 6909 может быть выполнена с возможностью перемещать массив 6905 преобразователей в один конец его желательного диапазона движения. Конфигурация часовой пружины второго участка 6909 также экономит место внутри отклоняющегося элемента 6900 тем, что отклонение массива 6905 преобразователей может быть обеспечено участком элемента 6907 электрического соединения (например, второго участка 6909), обернутого вокруг одной точки вдоль центральной оси 6906.
На фиг.70А показан вид в частичном поперечном сечении отклоняющегося элемента 7000. На фиг.70В показан вид с покомпонентным представлением деталей отклоняющегося элемента 7000. Отклоняющийся элемент 7000 может быть соединен с любым соответствующим шарниром и корпусом катетера, описанным здесь. Например, как показано, концевой колпачок 7001 отклоняющегося элемента 7000 может быть фиксированно соединен с шарниром 7014. Шарнир 7014 может быть выполнен аналогично шарниру 6001. Отклоняющийся элемент 7000 может, в общем, иметь такие размеры и форму, чтобы его можно было вставлять в тело пациента и обеспечивалось бы последующее формирование изображений внутреннего участка тела пациента. Отклоняющийся элемент 7000 может включать в себя дистальный конец 7002.
Отклоняющийся элемент 7000 может включать в себя корпус 7003 и концевой колпачок 7015. Концевой колпачок 7015 может иметь такие размеры, чтобы его можно было устанавливать и герметизировать с дистальным концом 7002 корпуса 7003. Корпус 7003 может представлять собой относительно жесткий элемент, в котором расположен двигатель 7004 и массив 7005 преобразователей, оба из которых описаны ниже.
Элемент 7007 электрического соединения может быть частично расположен внутри отклоняющегося элемента 7000. Элемент 7007 электрического соединения может включать в себя первый участок 7019, расположенный за пределами корпуса 7003, который во время работы может электрически соединять элементы внутри отклоняющегося элемента 7000 с электрическими проводниками в катетере, с которыми соединен отклоняющийся элемент 7000 (например, так, как описано со ссылкой на гибкую плату 6802 на фиг.68).
Обычно отклоняющийся элемент 7000 можно использовать в процессе генерирования изображений, аналогично тому, как описано выше со ссылкой на отклоняющийся элемент 6900. При этом массив 7005 преобразователей может быть расположен на механизме, который во время работы возвратно-качательно поворачивает массив 7005 преобразователей.
Массив 7005 преобразователей может быть закреплен на и может поддерживаться парой концевых колпачков 7008 массива, расположенных на противоположных концах массива 7005 преобразователей. В свою очередь, пара валов 7009 может быть фиксированно вставлена в соответствующие отверстия концевых колпачков 7008 массива. Один из валов 7009 может быть расположен внутри подшипника 7010, который может быть установлен на концевом колпачке 7001. Подшипник может обеспечивать для вала 7009, расположенного в нем (и, поэтому, массива 7005 преобразователей, который взаимно соединен с валом 7009) шарнирный поворот относительно концевого колпачка 7001. Другой вал 7009, расположенный на дистальном конце массива 7005 преобразователей, может быть закреплен на соединении 7011, которое, в свою очередь, закреплено на выходном валу 7012 двигателя 7004. Таким образом, массив 7005 преобразователей может быть фиксированным относительно выходного вала 7012 двигателя 7004 таким образом, что двигатель 7004 может возвратно-качательно поворачивать массив 7005 преобразователей вокруг оси вращения массива, определенной выходным валом 7012 и валами 7009.
Двигатель 7004 может быть расположен на дистальном конце 7002 отклоняющегося элемента 7000. Двигатель 7004 может представлять собой двигатель с электрическим питанием, который во время работы избирательно шарнирно поворачивает массив 7005 преобразователей в обоих направлениях, как по часовой стрелке, так и против часовой стрелки.
Двигатель 7004 может быть расположен внутри держателя 7013 двигателя, который, в свою очередь, фиксированно закреплен относительно концевого колпачка 7001 через пару стержней 7016. Пара стержней 7016 фиксирует держатель 7013 двигателя на концевом колпачке 7001 таким образом, что держатель 7013 двигателя расположен на фиксированном расстоянии от концевого колпачка 7001 таким образом, что массив 7005 преобразователей, концевые колпачки 7008 массива и валы 7009 могут быть расположены между держателем 7013 двигателя и концевым колпачком 7001. Электрические соединения с двигателем 7004 могут быть достигнуты через специализированные наборы электрических соединений 7018 (например, проводов), отдельных от элемента 7007 электрического соединения. Следует понимать, что такая конструкция позволяет устанавливать массив 7005 преобразователей, держатель 7013 двигателя и двигатель 7004 на концевом колпачке 7001 в виде подузла. Следовательно, корпус 7003 может быть установлен поверх такого подузла.
Уплотнительное кольцо 7017 может быть расположено вокруг выходного вала 7012 двигателя 7004. Уплотнительное кольцо 7017 может быть зажато между проксимальным концом держателя 7013 двигателя и пластиной 7022. Кроме того, проксимальный конец двигателя 7004 (то есть, конец двигателя 7004 с выходным валом 7012) также может быть расположен в области между проксимальным концом держателя 7013 двигателя и пластиной 7022. Смазка может быть введена в область между проксимальным концом держателя 7013 двигателя и пластиной 7022 на уплотнительном кольце 7017. Смазка может ограничить попадание текучей жидкости из области между проксимальным концом держателя 7013 двигателя и пластиной 7022, и поэтому может помогать препятствовать попаданию жидкости в двигатель 7004 через проксимальный конец двигателя 7004. Держатель 7013 двигателя и пластина 7022 могут иметь такие размеры, чтобы способствовать ограничению попадания жидкости в область между проксимальным концом держателя 7013 двигателя и пластиной 7022. Пластина 7022 может быть закреплена относительно держателя двигателя 7013 с помощью стержней 7016 и шпильки 7025.
Корпус 7003 может быть герметизирован, и замкнутый объем может быть определен корпусом 7003, концевым колпачком 7015 и концевым колпачком 7001. Замкнутый объем может включать в себя проксимальный замкнутый объем 7023 в области между пластиной 7022 и концевым колпачком 7001 и дистальный замкнутый объем, расположенный в области между проксимальным концом держателя 7013 двигателя и концевым колпачком 7015.
Проксимальный замкнутый объем 7023 может быть заполнен жидкостью. Массив 7005 преобразователей и соответствующая подкладка могут быть аналогичны массиву 6905 преобразователей и соответствующей подкладке массива, описанной со ссылкой на фиг.69А-69С. Корпус 7003 может включать в себя акустическое окно (не показано) в области корпуса 7003, соответствующей массиву 7005 преобразователей. Такое акустическое окно может быть аналогично акустическому окну 5326, описанному со ссылкой на фиг.53. Жидкость в проксимальном замкнутом объеме 7023 может быть собрана для обеспечения среды акустической связи между массивом 7005 преобразователей и корпусом 7003 или акустическим окном (если имеется).
Дистальный замкнутый объем 7024 может быть заполнен жидкостью. Жидкость в дистальном замкнутом объеме 7024 может быть выбрана для получения среды рассеяния тепла, для охлаждения двигателя 7004. Уплотнитель, такой как отверждаемая под действием ультрафиолетового излучения (UV) эпоксидная смола, может быть размещен вокруг участка двигателя 7004, где электрические соединения 7018 поступает в двигатель 7004 для ограничения возможности жидкости попадать в двигатель 7004. В этом отношении, путем использования отверждаемой UV излучением эпоксидной смолы и описанной выше смазки, двигатель 7004 может быть такого тип, который не разработан специально для работы со средой, заполненной жидкостью. В качестве альтернативы, может использоваться герметизированный двигатель, разработанный для работы в среде, заполненной жидкостью.
Элемент 7007 электрического соединения может представлять собой гибкую плату или другой соответствующий гибкий элемент с множеством проводников. Первый участок 7019 также может использоваться как тяга. Элемент 7007 электрического соединения может быть пропущен между концевым колпачком 7001 и корпусом 7003, по мере того как его пропускают через область, проксимальную шарниру 7014 внутренней части отклоняющегося элемента 7000. При этом элемент 7007 электрического соединения может надежно удерживаться между концевым колпачком 7001 и корпусом 7003.
Второй участок элемента 7007 электрического соединения может быть расположен внутри отклоняющегося элемента 7000 и может продолжаться от концевого колпачка 7001 до задней стороны массива 7005 преобразователей. В частности, второй участок 7020 может продолжаться вдоль длины массива 7005 преобразователей в пространстве между задней стороной массива 7005 преобразователей и корпусом 7003. На дистальном конце массива 7005 преобразователей, второй участок 7020 может быть обернут вокруг штифта 7021 и затем может продолжаться вдоль и находиться в контакте с задней стороной массива 7005 преобразователей для электрического соединения с массивом 7005 преобразователей (через подкладку массива 7005 преобразователей).
Штифт 7021 может быть закреплен на втором участке 7020, и второй участок может быть закреплен на задней стороне массива 7005 преобразователей. Таким образом, участок второго участка 7020, находящийся в контакте со штифтом 7021, и участок второго участка 7020, находящийся в контакте с задней стороной массива 7005 преобразователей, может быть фиксированно взаимно соединен с массивом 7005 преобразователей. С использованием второго участка 7020, закрепленного на штифте 7021, возвратно-качательное шарнирное движение массива 7005 преобразователей может привести к тому, что второй участок 7020 будет изгибаться в области между тем, где он закреплен на штифте 7021, и где второй участок закреплен между концевым колпачком 7001 и корпусом 7003. В соответствии с этим, второй участок 7020 элемента 7007 электрического соединения во время работы поддерживает электрическое соединение с массивом 7005 преобразователей, в то время как массив 7005 преобразователей шарнирно поворачивается.
На фиг.71А и 71В показан дистальный конец катетера 7100, который включает в себя корпус 7101 катетера, соединенный с пленочным шарниром 7102 (аналогичный пленочному шарниру 6001 по фиг.60, 61, и 62), с отклоняющимся элементом 7103. Дистальный конец катетера 7100 показан в состоянии его управления. Пленочный шарнир 7102 взаимно соединен с возможностью его удержания с отклоняющимся элементом 7103 и внутренним трубчатым корпусом 7106 из корпуса 7101 катетера. Элемент 7110 электрического соединения выполнен гибким и действует как элемент ограничения, взаимно соединенный с внешним трубчатым корпусом 7107 из корпуса 7101 катетера и отклоняющегося элемента 7103. Избирательное относительное движение между внутренним трубчатым корпусом 7106 и внешним трубчатым корпусом 7107 приводит к тому, что отклоняющийся элемент 7103 избирательно отклоняется заданным образом. Отклоняющийся элемент 7103 на фиг.71 отклоняется в положение, где он обращен вперед.
На фиг.71А показан отклоняющийся элемент 7103 с частичным поперечным сечением. На фиг.71В показан вид в поперечном сечении отклоняющегося элемента 7103 фиг.71А вдоль линии 71А-71А. Отклоняющийся элемент 7103 может иметь, в общем, такие размеры и форму, чтобы его можно было вставлять в тело пациента с последующим формированием изображений внутреннего участка тела пациента. Отклоняющийся элемент 7103 может включать в себя дистальный конец 7108. Отклоняющийся элемент
7103 может включать в себя корпус 7109. Корпус 7109 может представлять собой относительно жесткий элемент, в котором размещен двигатель 7104 и массив 7105 преобразователей, оба из которых описаны ниже.
Элемент 7110 электрического соединения может быть частично расположен внутри отклоняющегося элемента 7103. Элемент 7110 электрического соединения может быть фиксированным относительно отклоняющегося элемента 7103, где элемент 7110 электрического соединения поступает в отклоняющийся элемент 7103. При этом механические напряжения, действующие на элемент 7110 электрического соединения (например, из-за его функции тяги), не могут быть передаваться внутрь отклоняющегося элемента 7103.
Корпус 7109 может быть герметизирован, и замкнутый объем может быть определен корпусом 7109, конечной стеной 7111 и концевым колпачком 7112. Замкнутый объем может быть заполнен жидкостью. Замкнутый объем может быть заполнен путем подачи жидкости через отверстие 7113 для жидкости, обеспечивая возможность выпуска воздуха, находящегося внутри замкнутого объема, через вентиляционное отверстие 7114 для воздуха. Как отверстие 7113 для жидкости, так и вентиляционное отверстие 7114 для воздуха, могут быть герметизированы после того, как замкнутый объем будет заполнен жидкостью. Корпус 7109 может включать в себя акустическое окно.
Массив 7105 преобразователей и ассоциированная с ним подкладка могут быть аналогичны массиву 6905 преобразователей и подкладке, описанным со ссылкой на фиг.69. Как показано на фиг.71А, массив 7105 преобразователей ориентирован так, что активная передняя сторона обращена вверх от двигателя 7104. Обычно возможности генерирования изображения отклоняющегося элемента 7103 также аналогичны описанным со ссылкой на отклоняющийся элемент 6900 по фиг.69.
Массив 7105 преобразователей может быть закреплен на и может удерживаться с помощью проксимального концевого колпачка 7115 массива и коаксиального дистального концевого колпачка 7116 массива, расположенных на противоположных концах массива 7105 преобразователей. Проксимальный вал 7117 может быть фиксированно вставлен в проксимальный концевой колпачок 7115 массива. Дистальный вал 7118 может быть фиксированно вставлен в дистальный концевой колпачок 7116 массива. Проксимальный вал 7117 может быть расположен с возможностью шарнирного поворота внутри конечной стенки 7111 (например, внутри подшипника). Дистальный вал 7118 может быть шарнирно размещен внутри концевого колпачка 7112 (например, внутри подшипника). Таким образом, массив 7105 преобразователей может быть выполнен с возможностью, во время работы, поворачиваться вокруг оси, определенной дистальным валом 7118 и проксимальным валом 7117.
Двигатель 7104 расположен между задней стороной массива 7105 преобразователей и салазками 7119, которые расположены рядом с участком корпуса 7109. При этом двигатель 7104 и массив 7105 преобразователей могут быть размещены в одном и том же месте в общей точке вдоль продольной оси отклоняющегося элемента 7103. Салазки 7119 могут удерживать пару держателей 7123 двигателя, которые, в свою очередь, поддерживают двигатель 7104. При этом положение двигателя 7104 может быть фиксированным относительно корпуса 7109 и, поэтому, также относительно массива 7105 преобразователей. Передача 7120 может функционально соединять выходной вал (не показан) двигателя 7104 с массивом 7105 преобразователей таким образом, что двигатель 7004 может возвратно-качательно поворачивать массив 7105 преобразователей вокруг оси, определенной валами 7117, 7118. Передача 7120 может включать в себя любой соответствующий механизм, такой как два или несколько зубчатых колеса, ремень, кулачок или жесткие соединения, которые позволяют соединять выход двигателя 7104 с возвратно-поступательным шарнирным движением массива 7105 преобразователей. В этом отношении, двигатель 7104 во время работы может возвратно-качательно поворачивать массив 7105 преобразователей. Двигатель 7104 во время работы может приводиться в возвратно-качательное движение, и передача 7120 может передавать такое возвратно-качательное движение выхода двигателя 7104 с тем, чтобы возвратно-качательно поворачивать массив 7105 преобразователей. В другой компоновке двигатель 7104 может во время работы постоянно приводиться в движение в выбранном направлении, и передача 7120 может преобразовывать такое постоянное вращение выхода двигателя 7104 в движение для возвратно-качательного поворота массива 7105 преобразователей. Электрические соединения с двигателем 7104 могут быть сформированы через специализированный набор электрических соединений 7112 (например, проводов), отдельных от элемента 7110 электрического соединения.
Как отмечено выше, элемент 7110 электрического соединения может быть фиксированным относительно отклоняющегося элемента 7103, где элемент 7110 электрического соединения входит в отклоняющийся элемент 7103. С помощью отклоняющегося элемента 7103 элемент 7110 электрического соединения может включать в себя участок 7121 часовой пружины, аналогичный компоновке часовой пружины второго участка 6909, в соответствии с вариантом осуществления по фиг.69А - 69С. При этом участок 7121 часовой пружины элемента 7110 электрического соединения может быть расположен таким образом, что противодействующий крутящий момент для шарнирного поворота массива 7105 преобразователей может быть в существенной степени исключен. Участок 7121 часовой пружины элемента 7110 электрического соединения, во время работы, поддерживает электрическое соединение с массивом 7105 преобразователей, в то время как массив 7105 преобразователей выполняет шарнирный поворот. Конфигурация участка 7121 часовой пружины также позволяет экономить место внутри отклоняющегося элемента 7103, что позволяет предпочтительно выполнить отклоняющийся элемент с меньшими размерами.
На фиг.72 показан отклоняющийся элемент 7203 в частичном поперечном сечении. Отклоняющийся элемент 7203 аналогичен отклоняющемуся элементу 7103 на фиг.71А. Отклоняющийся элемент 7203 включает в себя массив 7205 преобразователей и двигатель 7204, расположенные позади задней стороны массива 7105 преобразователей. Однако в отклоняющемся элементе 7203, двигатель 7204 функционально соединен с массивом 7205 преобразователей через кабель 7206, частично намотанный вокруг выходного вала 7208 двигателя 7204. Оба конца кабеля 7206 закреплены на конечном колпачке 7207 массива, закрепленном на массиве 7205 преобразователей. В соответствии с этим, в то время как двигатель 7204 вращает выходной вал 7208, участок кабеля 7206 наматывается вокруг выходного вала 7208, в то время как одновременно другой участок кабеля 7206 разматывается с выходного вала 7208. При закреплении концов кабеля 7206 на массиве 7205 преобразователей на противоположных сторонах оси вращения массива 7205 преобразователей, наматывание и разматывание кабеля 7206 можно использовать для шарнирного поворота массива 7205 преобразователей.
Пружины 7209 могут быть расположены между концами кабеля 7206 и дистальным концевым колпачком 7207 массива. Такие пружины 7209 могут компенсировать нелинейные вариации расстояний между участками крепления кабеля 7206 к дистальному конечному колпачку 7207 массива, по мере того, как массив 7205 преобразователей шарнирно отклоняется относительно двигателя 7204. Пружины могут включать в себя участок упругого полимера, расположенный между верхней пластиной (на которой закреплен кабель 7206), и дистальным концевым колпачком 7207 массива.
На фиг.73А показан дистальный конец катетера 7300, который включает в себя корпус 7301 катетера, соединенный пленочным шарниром 7302 (аналогично пленочному шарниру 6001 по фиг.60, 61 и 62), с отклоняющимся элементом 7303. Пленочный шарнир 7302 взаимно соединен с отклоняющимся элементом 7303 и внутренним трубчатым корпусом 7306 корпуса 7301 катетера. Элемент 7310 электрического соединения выполнен гибким и действует как ограничительный элемент, взаимно соединенный с внешним трубчатым корпусом 7307 корпуса 7301 катетера и отклоняющимся элементом 7303. Избирательное относительное движение между внутренним трубчатым корпусом 7306 и внешним трубчатым корпусом 7307 обеспечивает избирательное отклонение отклоняющегося элемента 7303 заданным образом. Отклоняющийся элемент 7303 на фиг.73 показан в положении без отклонения. Внутренний трубчатый корпус 7306 может включать в себя канал 7311.
Отклоняющийся элемент 7303 может, в общем, включать в себя дистальный конец 7308 и проксимальный конец 7309. Отклоняющийся элемент 7303 может включать в себя корпус 7312. Корпус 7312 может быть выполнен как относительно жесткий (по сравнению с корпусом 7301 катетера) элемент, в котором размещен двигатель 7304 и массив 7305 преобразователей, оба из которых описаны ниже. Отклоняющийся элемент 7303 может включать в себя продольную ось 7313.
Внутри отклоняющегося элемента 7303 элемент 7310 электрического соединения может продолжаться от проксимального конца 7309 вдоль корпуса 7312 между подкладкой 7316 массива и внутренней стенкой корпуса 7312, до участка 7317 часовой пружины элемента 7310 электрического соединения. От участка 7317 часовой пружины элемент 7310 электрического соединения может взаимно соединяться с подкладкой 7316 массива. Такая конфигурация аналогична конфигурации элемента 5311'' электрического соединения по фиг.56А и 56В. В одном варианте компоновки элемент 7310 электрического соединения может быть выполнен из одной гибкой платы.
Проксимальный конец 7309 отклоняющегося элемента 7303 может включать в себя конечный элемент 7318, герметично расположенный внутри него. Конечный элемент 7318 может быть герметизирован вдоль его внешнего периметра, используя уплотнительный материал 7319. Уплотнительный материал 7319 может быть расположен, как представлено между внешним периметром концевого элемента 7318 и внутренней поверхностью корпуса 7312. Уплотнительный материал 7319 может быть аналогичен уплотнительному материалу 5316 фиг.53. Замкнутый объем 7320 может быть определен корпусом 7312 и концевым элементом 7318. Замкнутый объем 7320 может быть заполнен жидкостью и герметизирован.
Отклоняющийся элемент 7303 может быть заполнен с использованием любого соответствующего способа. Отклоняющийся элемент 7303 может включать в себя пару герметизируемых отверстий 7321, 7322, расположенных на противоположных концах отклоняющегося элемента 7303. Герметизируемые отверстия 7321, 7322 могут обеспечивать возможность заполнения отклоняющегося элемента 7303, аналогичного тому, как было описано со ссылкой на кончик 5301 катетера по фиг.53. Отклоняющийся элемент 7303 может включать в себя элемент 7323 сильфона, который может выполнять функцию, аналогичную элементу 5320 сильфона по фиг.53, с тем исключением, что элемент 7323 сильфона может выравнивать или частично выравнивать давление внутри замкнутого объема 7320 с окружающей средой отклоняющегося элемента 7303.
Отклоняющийся элемент 7303 может включать в себя улавливатель 7324 пузырьков, показанный в поперечном сечении на фиг.73. Улавливатель 7324 пузырьков может быть выполнен и может функционировать аналогично улавливателю 5324 пузырьков, описанному со ссылкой на фиг.53.
Отклоняющийся элемент 7303 может во время работы возвратно-качательно шарнирно поворачивать массив 7305 преобразователей со скоростью, достаточной для генерирования 3D или 4D изображений в объеме 7325 изображения. При этом устройство формирования ультразвукового изображения может во время работы отображать реальное видеоизображение объема формирования изображения. Обычно массив 7305 преобразователей во время работы передает ультразвуковую энергию через акустическое окно 7326 корпуса 7312.
Массив 7305 преобразователей может быть взаимно соединен с выходным валом 7327 двигателя 7304 на проксимальном конце массива 7305 преобразователей. Кроме того, массив 7305 преобразователей может удерживаться на дистальном конце массива 7305 преобразователей с помощью вала 7328, который удерживается на дистальном конце корпуса 7312. Двигатель 7304 может работать для возвратно-качательного шарнирного поворота выходного вала 7327 двигателя 7304 и, поэтому, возвратно-качательно шарнирно отклоняет массив 7305 преобразователей, взаимно соединенный с выходным валом 7327. Внешний участок двигателя 7304 может быть фиксированно закреплен на внутренней поверхности корпуса 7312 с помощью одного или несколько держателей 7329 двигателя. Электрические соединения (не показаны) с двигателем 7304 могут быть получены с помощью специализированного набора электрических соединений (например, проводов), отдельных от элемента 7310 электрического соединения. В качестве альтернативы, электрические соединения с двигателем 7304 могут быть изготовлены с использованием участка проводников элемента 7310 электрического соединения.
Положения двигателя 7304, участка 7317 часовой пружины, и массива 7305 преобразователей могут быть взаимно заменены любым соответствующим способом. Например, на фиг.73В показан дистальный конец катетера 7300', который аналогичен катетеру 7300 фиг.73А со взаимно-переставленными положениями участка 7317 часовой пружины и массива 7305 преобразователей.
Катетер 7300' фиг.73В включает в себя отклоняющийся элемент 7330, который отклоняется таким же образом, как и отклоняющийся элемент 7303 фиг.73А. Внутри отклоняющегося элемента 7330 элемент 7310' электрического соединения может продолжаться от проксимального конца 7309 вдоль корпуса 7312 между двигателем 7304' и внутренней стенкой корпуса 7312', до участка 7317' часовой пружины элемента 7310' электрического соединения. От участка 7317' часовой пружины элемент 7310' электрического соединения может продолжаться в дистальном направлении и может соединяться с подкладкой 7316 массива. В компоновке элемент 7310' электрического соединения может быть выполнен на основе одной гибкой платы.
Массив 7305 преобразователей может быть взаимно соединен с выходным валом 7327' двигателя 7304' на проксимальном конце массива 7305 преобразователей. Выходной вал 7327' может продолжаться через участок 7317' часовой пружины. Кроме того, массив 7305 преобразователей может удерживаться на дистальном конце массива 7305 преобразователей с помощью вала 7328', который удерживается на дистальном конце корпуса 7312'. Двигатель 7304'' во время работы обеспечивает возвратно-качательный поворот выходного вала 7327' двигателя 7304 и, поэтому, может возвратно-качательно поворачивать массив 7305 преобразователей, взаимно соединенный с выходным валом 7327'. Акустическое окно 7326' может окружать весь внешний контур корпуса 7312' или его участок в области массива 7305 преобразователей, обеспечивая возможность формирования изображений в направлениях, описанных ниже.
Двигатель 7304' может во время работы возвратно-качательно поворачивать массив 7305 преобразователей из положения, показанного на фиг.73В на выбранную величину, такую как +/- 30°. Таким образом, двигатель 7304' во время работы может возвратно-качательно поворачивать массив 7305 преобразователей на достаточно большой угол и со скоростью, достаточной для генерирования трехмерных изображений в режиме реального времени или в режиме, близком к режиму реального времени объема 7331 изображения, который аналогичен объему 7325 изображения фиг.73А.
Двигатель 7304' также во время работы вначале может поворачивать массив 7305 преобразователей в выбранную ориентацию и затем возвратно-качательно поворачивать массив 7305 преобразователей вокруг выбранной ориентации на выбранное расстояние. Например, двигатель 7304' во время работы может поворачивать массив 7305 преобразователей на 180° из положения, показанного на фиг.73В таким образом, что он обращен вниз на фиг.73В, и затем двигатель 7304' может во время работы возвратно-качательно поворачивать массив 7305 преобразователей вокруг положения, направленного вниз на достаточно большой угол, и со скоростью, достаточной для генерирования трехмерных изображений в режиме реального времени или в режиме, близком к режиму реального времени объема 7332 изображения. При этом двигатель 7304' первоначально может поворачивать массив 7305 преобразователей и затем может обеспечивать возвратно-качательные движения массива 7305 преобразователей вокруг любого выбранного угла для формирования изображения в объеме формирования изображения, в любом выбранном направлении, уменьшая, таким образом, необходимость повторной установки катетера 7300' для получения требуемых объемов формирования изображения.
Двигатель 7304' во время работы может возвратно-качательно поворачивать массив 7305 преобразователей на 360° или больше. При этом отклоняющийся элемент 7330 во время работы может возвратно-качательно поворачивать массив 7305 преобразователей на достаточно большой угол и со скоростью, достаточной для генерирования трехмерных изображений в режиме реального времени или в режиме, близком к режиму реального времени объема формирования изображения, который полностью окружает отклоняющийся элемент 7330.
Участок 7317' часовой пружины механизма может быть выполнен с возможностью выполнения поворота на 360° или больше массива 7305 преобразователей. Такая возможность может обеспечиваться с помощью одного участка 7317' часовой пружины или с помощью множества участков часовой пружины, расположенных последовательно, и при этом каждый участок воспринимает часть общего шарнирного поворота массива 7305 преобразователей. В компоновке участок 7317' часовой пружины, двигатель 7304' и акустическое окно 7326' могут быть выполнены с возможностью воспринимать диапазон углового движения, не превышающий 360° (например, 270°, 180°).
На фиг.74 показан частичный вид в поперечном сечении варианта осуществления катетера 7400, который аналогичен катетеру 7300 по фиг.73. Элементы, аналогичные показанным в варианте осуществления на фиг.73, обозначены символом штрих ('), который следует после номера ссылочной позиции. Разница между катетером 7400 по фиг.74 и катетером 7300 по фиг.73 состоит в том, что в катетере 7400 двигатель 7304', для привода массива 7305 преобразователей размещен на дистальном конце корпуса 7401 катетера с противоположной стороны шарнира 7302', вместо его размещения в отклоняющемся элементе 7403. Благодаря перемещению двигателя из отклоняющегося элемента 7403 в корпус 7401 катетера, длина отклоняющегося элемента 7403 может быть уменьшена. Двигатель 7304' во время работы может приводить в движение массив 7305 преобразователей через гибкий ведомый элемент 7402, который может, на одном конце, быть взаимно соединен с выходным валом двигателя 7304'. На другом конце гибкий ведомый элемент 7402 может быть взаимно соединен с массивом 7305 преобразователей. Гибкий ведомый элемент 7402 может быть герметизирован вдоль его внешнего периметра, где он проходит через проксимальную стенку 7404 отклоняющегося элемента 7403.
Движение привода двигателей (например, шарнирное возвратно-качательное движение) массивов преобразователей, описанное здесь, может быть интегрировано в любой соответствующий вариант осуществления, описанный здесь. Двигатели, описанные здесь (например, двигатель 6904), могут представлять собой бесщеточные двигатели постоянного тока. В случае, когда используемый двигатель представляет собой бесщеточный двигатель постоянного тока, присутствуют три провода, которые выполняют возбуждение трех фаз тока двигателя. Двигатель может быть приведен в движение с использованием широтно-импульсной модуляции. В таком случае драйвер передает импульсы с частотой, например, 40 кГц, для поддержания тока на требуемом уровне. Из-за резких фронтов импульсов драйвер такого рода может вызывать взаимные помехи для ультразвуковой системы. Для исключения этого экран может быть расположен вокруг проводников двигателя для сдерживания попадания сигнала помехи в проводники, электрически соединенные с массивом преобразователей. В другом варианте осуществления сигналы широтно-импульсной модуляции может быть отфильтрованы для уменьшения уровня сигнала в частотном диапазоне, используемом массивом преобразователей (например, в полосе ультразвуковой частоты). В конкретном варианте осуществления изобретения можно одновременно использовать как экранирование, так и фильтрацию. Двигатель, в качестве альтернативы, может быть приведен в движение с помощью аналогового драйвера, который формирует постоянный ток (без импульсов), для привода двигателя.
Акустические, емкостные, электромагнитные и оптические технологии датчиков можно использовать как средство для детектирования углового положения любого соответствующего шарнирно-поворачивающегося массива преобразователей, описанного здесь. На основе данных, получаемых от датчиков, можно адаптивно регулировать операцию, выполняемую шарнирно-поворачивающимся массивом преобразователей, для компенсации вариации угловой скорости шарнирно-поворачивающегося массива преобразователей. Например, адаптивная компенсация может быть выполнена путем регулирования частоты повторения импульсов передаваемой ультразвуковой энергии, путем регулирования алгоритма преобразования сканирования, или путем изменения управления двигателем для изменения управления шарнирно-поворачивающегося массива преобразователей.
Любой известный датчик может использоваться в вариантах осуществления изобретения, описанных здесь, включая в себя кодирование с помощью оптического средства, включающего в себя кодеры вращения, определяющие расстояние с помощью интерферометрии и/или бесконтактные датчики на основе яркости, емкостные кодеры, магнитные кодеры, ультразвуковые кодеры, изгиб мембраны гибкого кодера и использование акселерометров.
В одном варианте осуществления изобретения могут использоваться данные положения, получаемые от датчика при сравнении с требуемым положением, используя программу в системе обратной связи. Если фактическое положение находится за пределами требуемого положения (например, угловое положение шарнирно-поворачивающегося массива преобразователей находится за пределами требуемого углового положения шарнирно-поворачивающегося массива преобразователей), сервосистема может компенсировать ошибку путем ускорения двигателя или усиления операции привода. И, наоборот, если фактическое положение находится впереди, сервосистема может компенсировать ошибку путем замедления двигателя или привода.
Варианты осуществления описанных здесь отклоняющихся элементов, могут иметь замкнутый участок, который может содержать или может не содержать жидкость.
Жидкость обеспечивает среду акустической связи между массивом ультразвуковых преобразователей и акустическим окном кончика. Дополнительное преимущество может обеспечивать охлаждение двигателя. Обычно максимальная требуемая температура катетера, работающего внутри тела, составляет приблизительно 41°С. Нормальная температура крови составляет приблизительно 38°С. В таких обстоятельствах может потребоваться баланс рассеяния тепла в кончике и потока тепла из кончика таким образом, чтобы температура кончика не превышала приблизительно на 3°С величину 38°С. Фактическая температура, отслеживаемая рядом с дистальным концом корпуса катетера и отклоняющимся элементом является желательной, с обратной связью с контроллером, с автоматическим предупреждением или отключением, на основе превышения некоторого верхнего, заранее определенного предела температуры. Термистор может быть установлен внутри кончика для отслеживания внутренней температуры таким образом, что система может отключать операции, прежде чем температура превысит заданный температурный предел. Термопара может представлять собой соответствующую альтернативу использованию термистора.
Способы активного охлаждения, такие как термоэлектрическое охлаждение или пассивная проводимость вдоль металлических компонентов, также могут использоваться в вариантах осуществления, описанных здесь. Другие типы систем теплового администрирования, такие как раскрытые в документе US 2007/0167826, могут использоваться в вариантах осуществления изобретения, описанных здесь.
Жидкость, выбранная для использования в замкнутом участке, может обеспечивать: требуемые акустические свойства, требуемые тепловые свойства, соответствующую низкую вязкость, с тем чтобы не препятствовать колебательному движению массива или других компонентов, устойчивость к коррозии компонентов и совместимость с кровеносной системой и остальным телом человека в случае утечки. Текучие среды могут быть выбраны так, чтобы исключить или свести к минимуму испарение или формирование пузырьков с течением времени. В вариантах осуществления изобретения, описанных здесь, жидкость может впрыскиваться во время изготовления или в точке использования. В любом случае текучие среды могут быть стерильными и смешиваемыми с водой. Стерильный солевой раствор представляет собой пример жидкости, которая может использоваться в описанных здесь вариантах осуществления изобретения.
Варианты осуществления изобретения, описанные здесь, могут включать в себя отклоняющийся элемент, имеющий цилиндрическую форму или другую форму, разработанную для сведения к минимуму повреждения сосудов или тела во время движения (например, вращения, перемещения), или выполнения операции внутри пациента. Кроме того, внешняя поверхность отклоняющихся элементов может быть гладкой. Такой гладкий, нетравматический внешний профиль может способствовать уменьшению формирования тромбов и/или повреждения ткани. Такие нетравматические формы могут быть предпочтительными для уменьшения турбулентности, которая может вызвать повреждения кровяных клеток.
Варианты осуществления изобретения, описанные здесь, в общем, описаны как включающие в себя массивы преобразователей, массивы ультразвуковых преобразователей и т.п. Однако также можно предусмотреть, что описанные здесь катетеры могут включать в себя другие соответствующие устройства вместо или в дополнение к таким устройствам. Например, описанные здесь варианты осуществления изобретения могут включать в себя устройства для абляции или другие терапевтические устройства вместо или в дополнение к массивам преобразователей, массивам ультразвуковых преобразователей и т.п.
Трудность, связанная с использованием обычных катетеров ICE, состоит в необходимости управления катетером в множестве точек, внутри сердца, для того, чтобы захватить различные планы формирования изображений, необходимые во время процедуры. На фиг.75 показано размещение управляемого катетера 7501 для внутрисердечной эхокардиографии в правом предсердии 7502 сердца 7503. На фиг.76 показано размещение управляемого катетера 7501 в правом предсердии 7502 сердца 7503, после того как положение катетера было повторно установлено (используя управление катетером 7501) для размещения отклоняющегося элемента 7504, который расположен на дистальном конце катетера 7501, в требуемом положении. Клинический врач может установить и затем задать положение катетера 7501 внутри сердца 7503, фиксируя положение катетера 7501 (механизм фиксации на ручке, не показан). При этом после установки, положение катетера 7501 может оставаться, по существу неизменным, в то время как отклоняющийся элемент 7504 отклоняется.
С помощью отклоняющегося элемента, установленного, как показано на фиг.76, объемное изображение может быть сгенерировано из трехмерного объема 7506 первого участка сердца 7503. Клинический врач может затем манипулировать с ориентацией отклоняющегося элемента 7504 для захвата определенного диапазона требуемых объемов формирования изображения. Например, на фиг.77 показан отклоняющийся элемент 7504, отклоняющийся по второе положение для захвата объемного изображения трехмерного объема 7507 второго участка сердца 7503. На фиг.78 показан отклоняющийся элемент 7504, отклоненный в третье положение для захвата объемного изображения трехмерного объема 7508 третьего участка сердца 7503. Варианты осуществления отклоняющихся элементов, описанных здесь, могут, во время работы, занимать такие положения и больше в пределах правого предсердия 7502 сердца 7503, которые могут иметь объем внутри сердца с поперечным размером приблизительно 3 см. Объемные изображения таких трехмерных объемов 7506, 7507 и 7508 могут быть получены путем отклонения отклоняющегося элемента и работы двигателя для обеспечения возвратно-качательного шарнирного поворота массива ультразвуковых преобразователей с отклоняющимся элементом, в то время как дистальный конец катетера 7501 остается в положении, показанном на фиг.75.
Медицинские процедуры, которые могут быть выполнены с вариантами осуществления, раскрытыми здесь, включают в себя, без ограничения, прокол перегородки и размещение блокатора перегородки. Способ для формирования изображения правого предсердия с использованием вариантов осуществления может включать в себя перемещение корпуса катетера в правое предсердие, управление дистальным концом корпуса катетера с переводом его в требуемое положение, выполнение операций с двигателем для обеспечения движения ультразвуковых преобразователей, и поддержание фиксированного положения корпуса катетера, отклонение отклоняющегося элемента, содержащего ультразвуковые преобразователи вокруг шарнира для съемки, по меньшей мере, одного изображения, по меньшей мере, в одной плоскости обзора.
Медицинские процедуры, которые могут выполняться из левого предсердия, включают в себя без ограничения размещение блокатора левого придатка предсердия, замену митрального клапана, замену аортального клапана, и абляцию сердца для фибрилляции предсердий. Способ формирования изображений левого предсердия с использованием вариантов осуществления, описанных здесь, может включать в себя перемещение корпуса катетера в правое предсердие, управление дистальным концом корпуса катетера для перевода в требуемое положение при поддержании фиксированного положения корпуса катетера, отклонение отклоняющегося элемента, содержащего ультразвуковые преобразователи вокруг шарнира для достижения требуемого положения, выполнение операций двигателя для обеспечения движения ультразвуковых преобразователей для съемки, по меньшей мере, одного изображения, по меньшей мере, в одной плоскости обзора внутреннего вида перегородки предсердий, идентификации анатомической области для прокола перегородки, продвижения инструмента для прокола перегородки через канал катетера, продвижения направляющего провода, перемещение корпуса катетера в левое предсердие, управление корпусом катетера с переводом в требуемое положение при поддержании фиксированного положения корпуса катетера, отклонение отклоняющегося элемента, содержащего ультразвуковые преобразователи вокруг шарнира, в требуемое положение, и выполнение операций с помощью двигателя, для обеспечения движения ультразвуковых преобразователей для съемки, по меньшей мере, одного изображения, по меньшей мере, в одной плоскости обзора.
Дополнительные модификации и расширения вариантов осуществления изобретения, описанных выше, будут понятны для специалиста в данной области техники. Такие модификации и расширения должны находиться в пределах объема настоящего изобретения, который определен формулой изобретения, которая следует далее.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННЫЙ КАТЕТЕР | 2011 |
|
RU2526262C2 |
| КАТЕТЕР С ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ИЗ СПЛАВА С ПАМЯТЬЮ ФОРМЫ | 2011 |
|
RU2544368C2 |
| УДАЛЕНИЕ ТКАНИ ИЗ ОКОЛОНОСОВОЙ ПАЗУХИ И НОСОВОЙ ПОЛОСТИ | 2010 |
|
RU2572745C2 |
| ГИБКИЕ ФРАГМЕНТИРУЮЩИЕ КАТЕТЕРЫ С ВИЗУАЛИЗАЦИЕЙ И СПОСОБЫ ИХ ИСПОЛЬЗОВАНИЯ И ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2553930C2 |
| СИЛОИЗМЕРИТЕЛЬНЫЙ КАТЕТЕР С ПРИСОЕДИНЕННОЙ ЦЕНТРАЛЬНОЙ РАСПОРКОЙ | 2009 |
|
RU2506965C2 |
| САМОФИКСИРУЮЩАЯСЯ РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКОГО УСТРОЙСТВА С МЕХАНИЗМОМ СЦЕПЛЕНИЯ С КУЛАЧКОВЫМ ПРИВОДОМ | 2012 |
|
RU2608440C2 |
| ДВОЙНАЯ ПЕТЛЯ С ОДИНАРНЫМ УПРАВЛЯЮЩИМ ПРОВОДОМ ДЛЯ ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2013 |
|
RU2636180C2 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ МАТЕРИАЛА И СПОСОБ ПРИМЕНЕНИЯ | 2013 |
|
RU2537765C9 |
| УСТРОЙСТВО И СПОСОБЫ ОБНАРУЖЕНИЯ УСТЬЯ ОКОЛОНОСОВОЙ ПАЗУХИ | 2009 |
|
RU2500337C2 |
| Рукоятка управления медицинским устройством | 2012 |
|
RU2617271C2 |
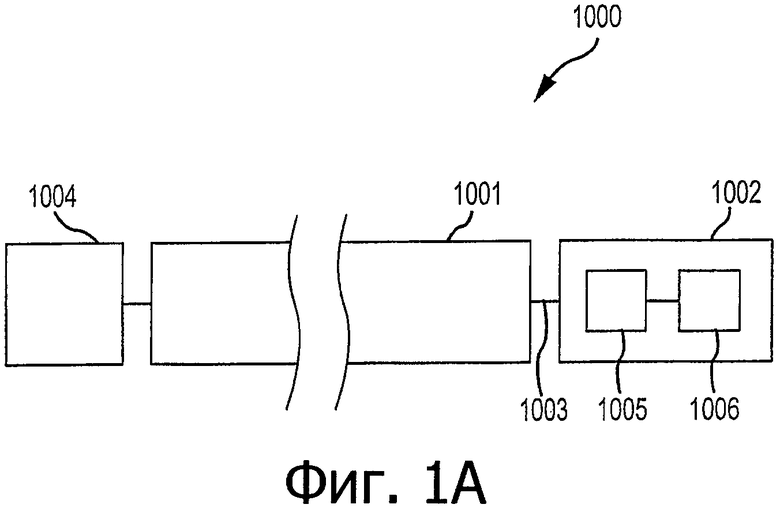
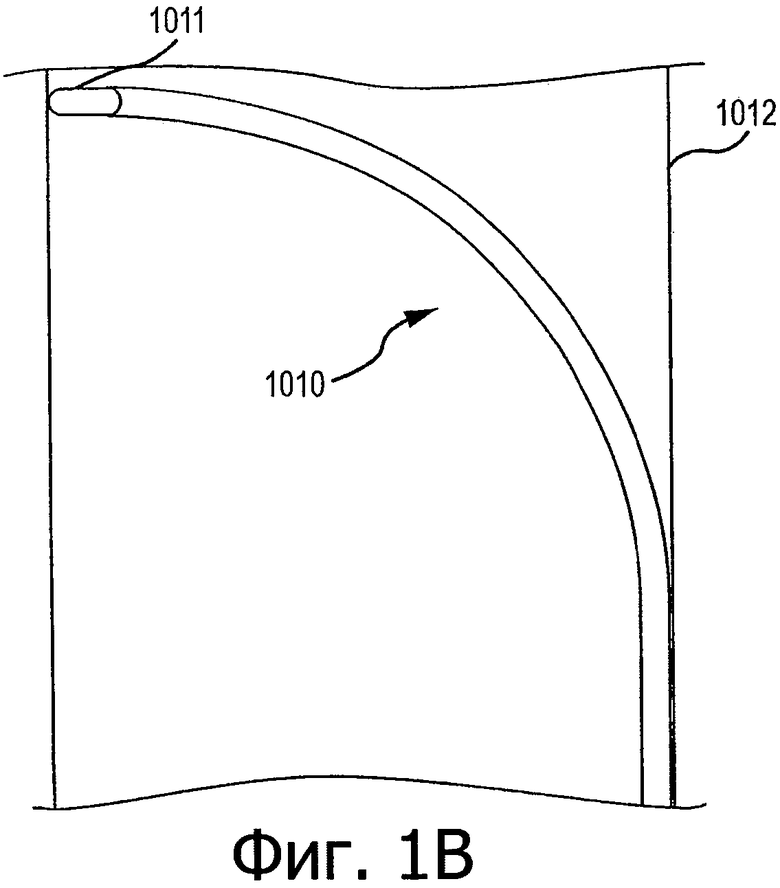
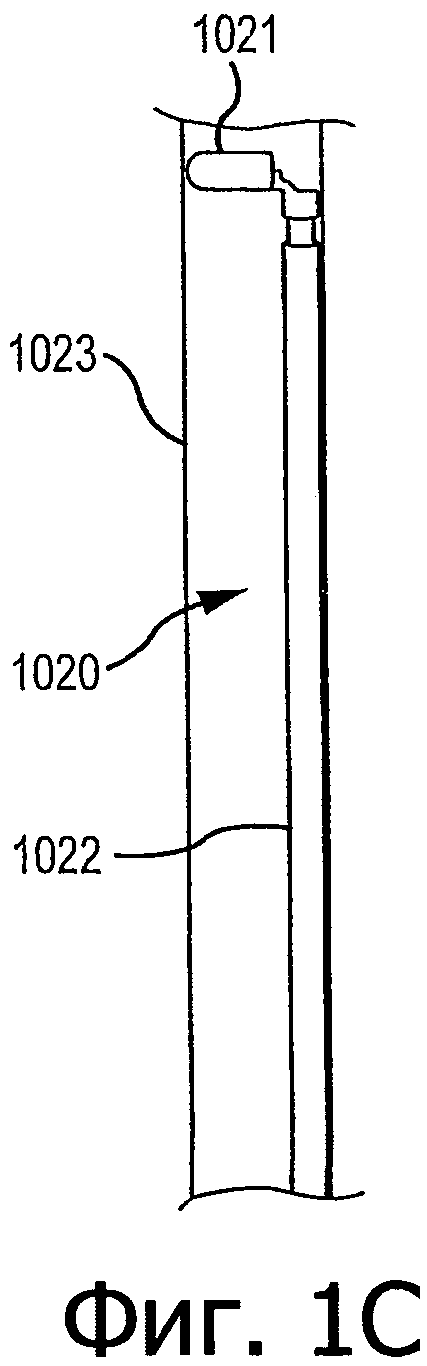
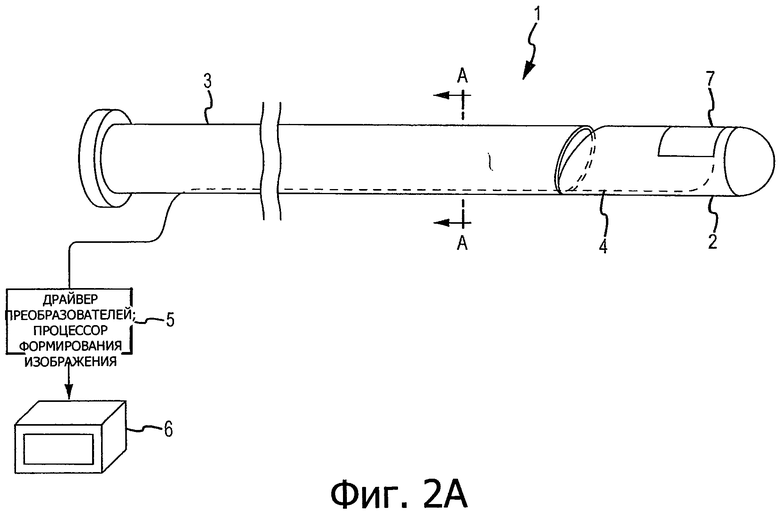
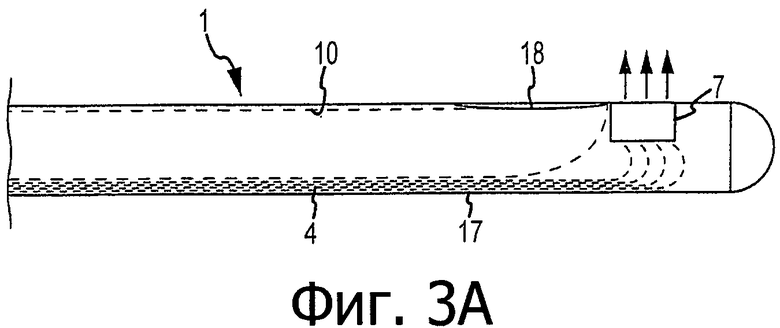
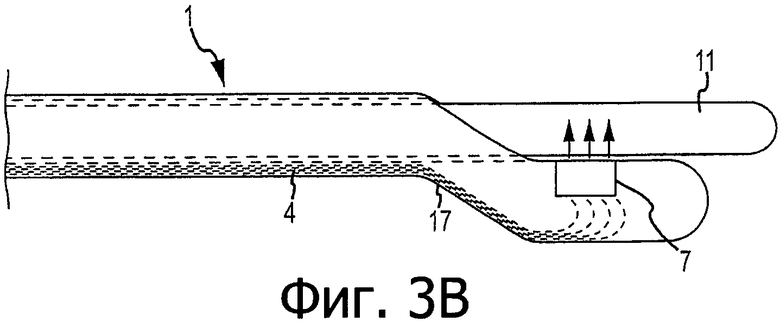
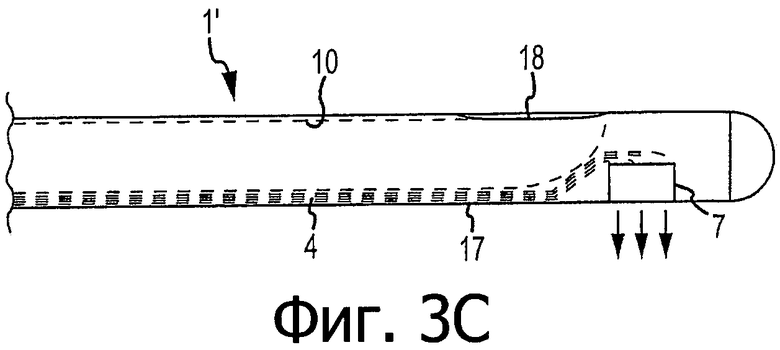
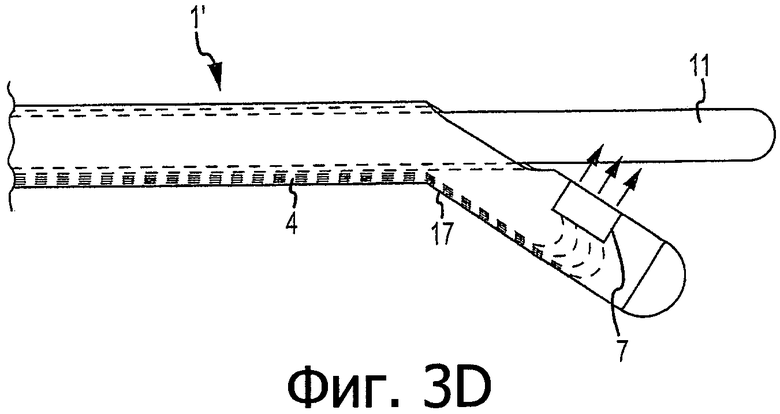
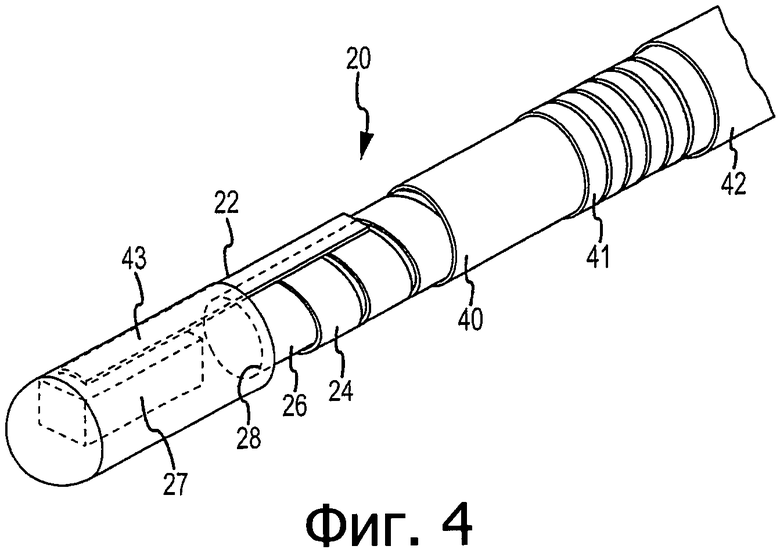
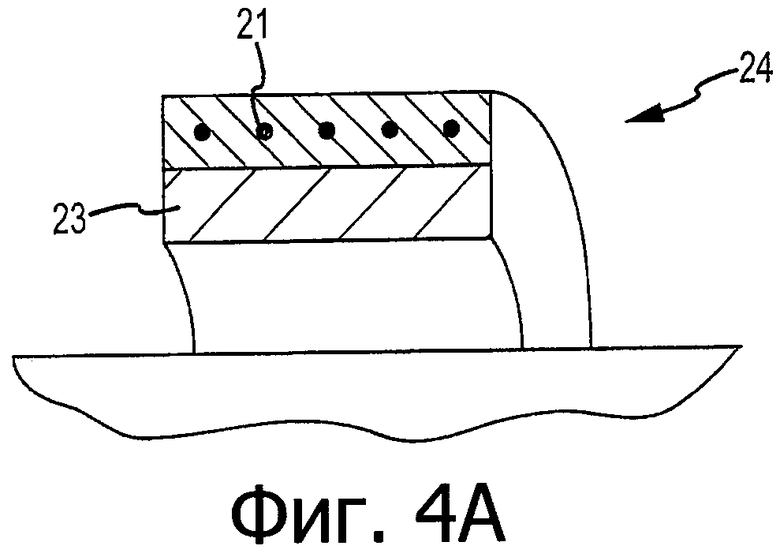
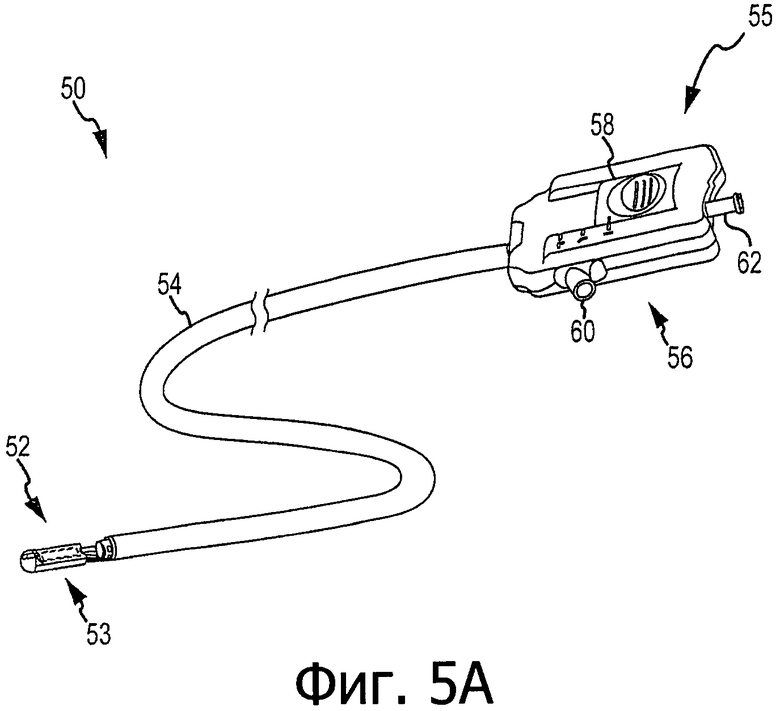
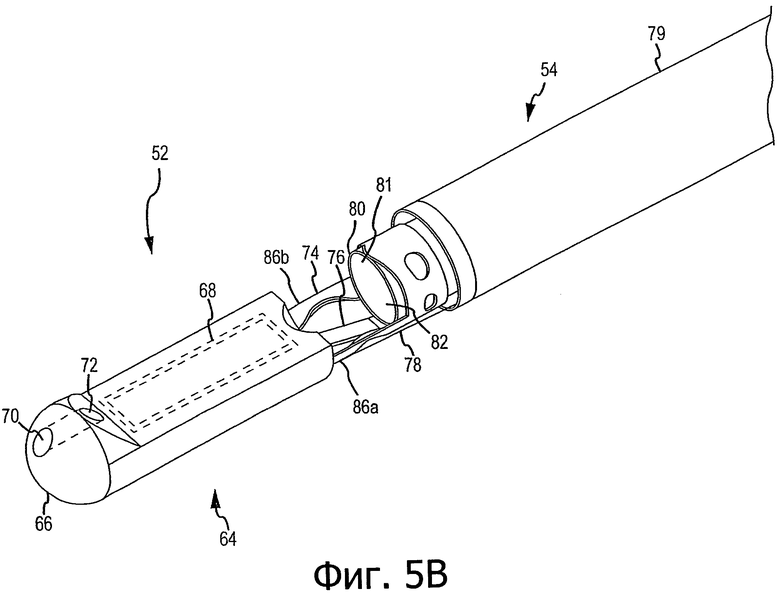
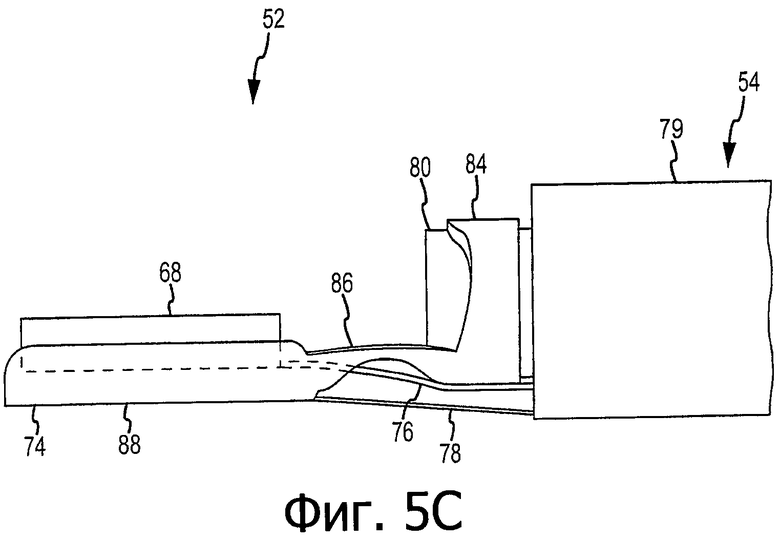
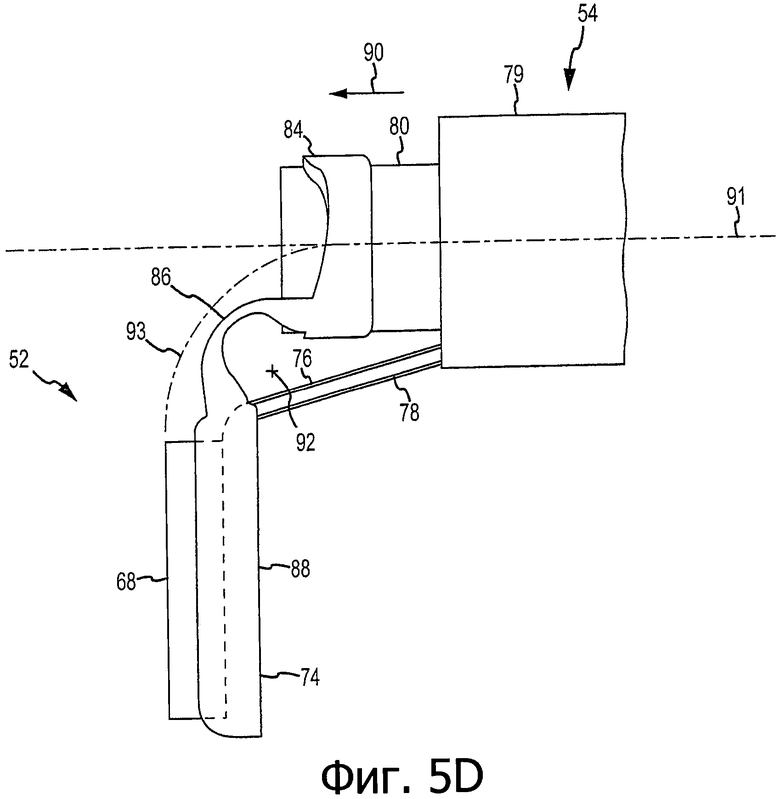
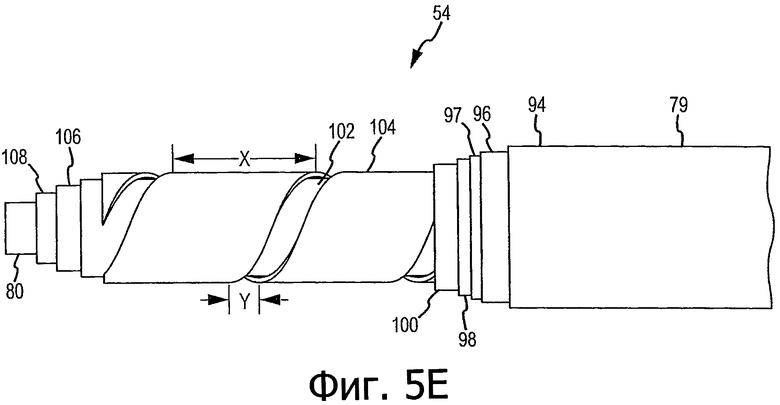
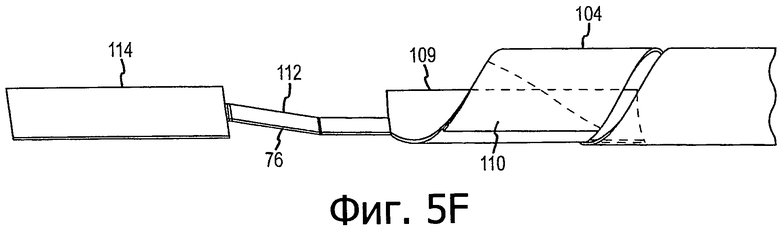
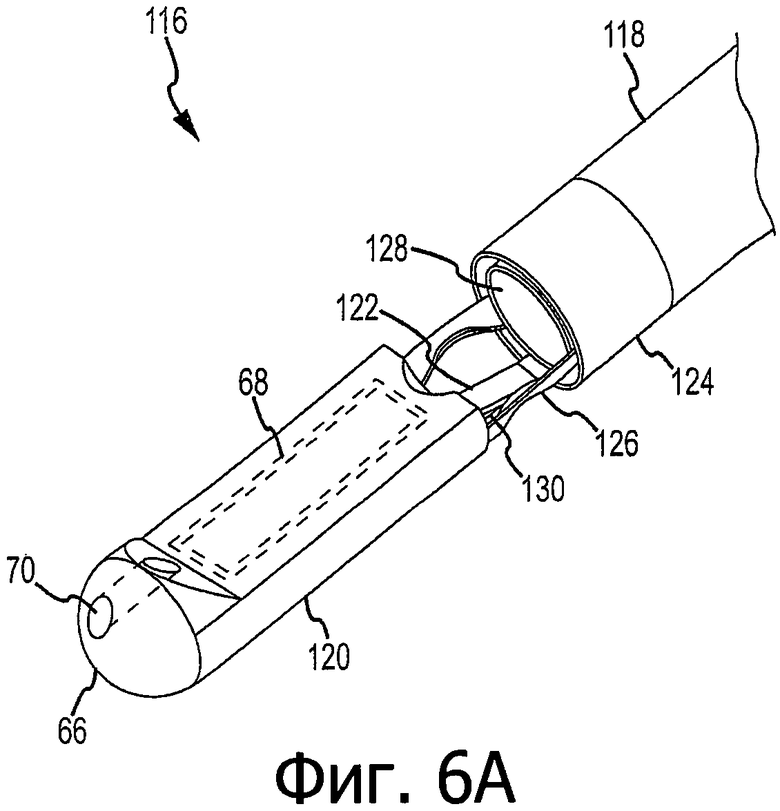
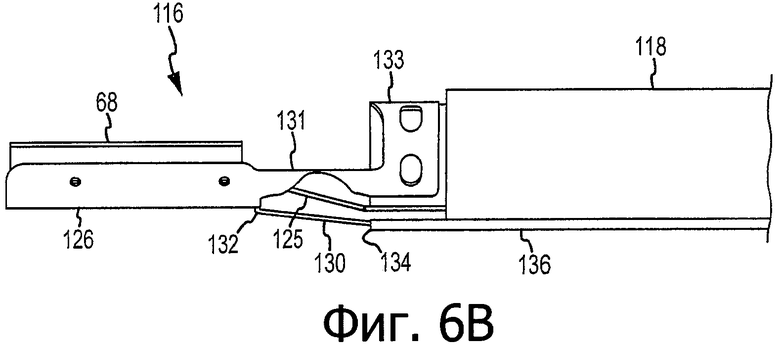
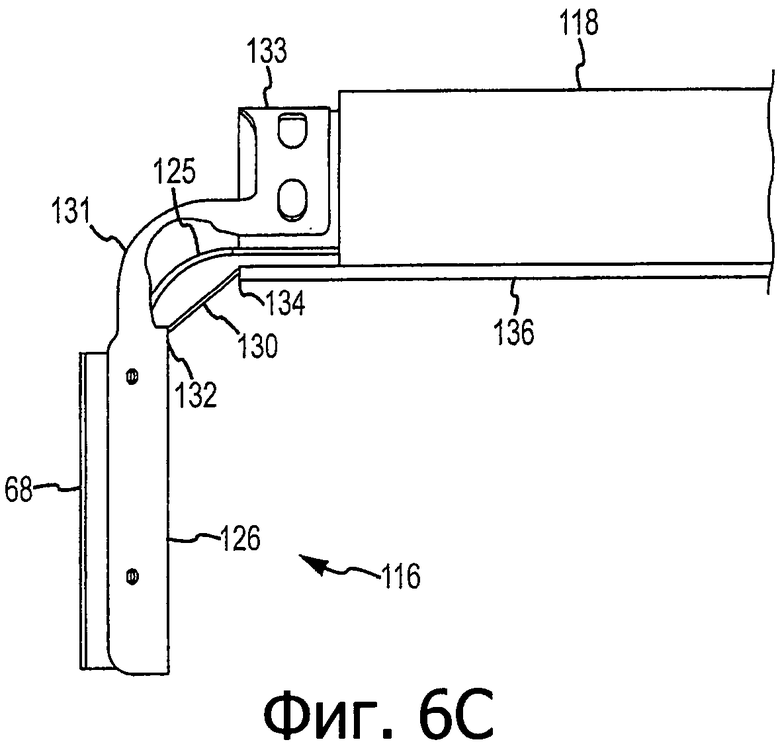
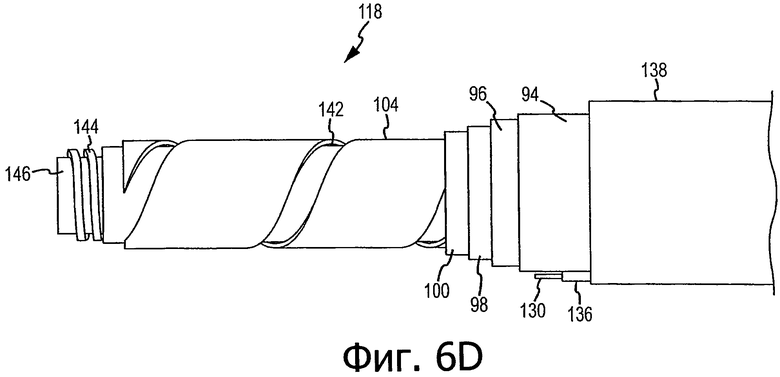
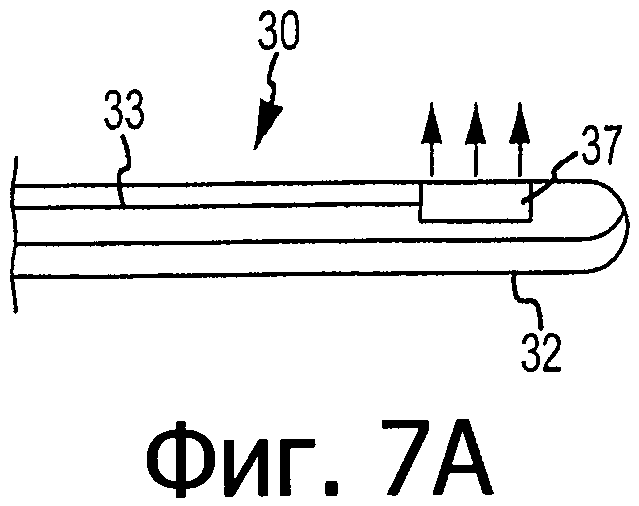
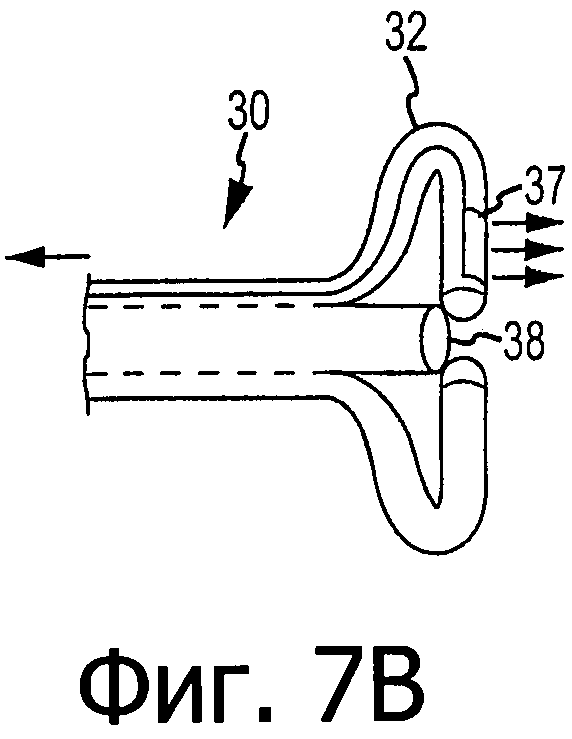
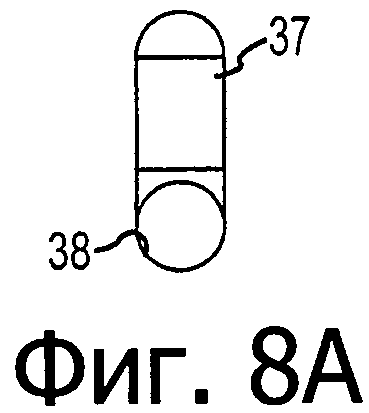
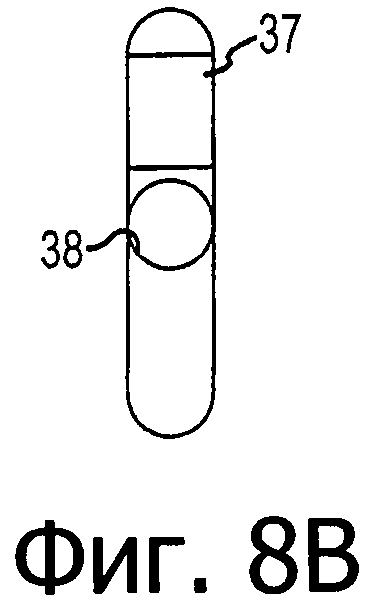
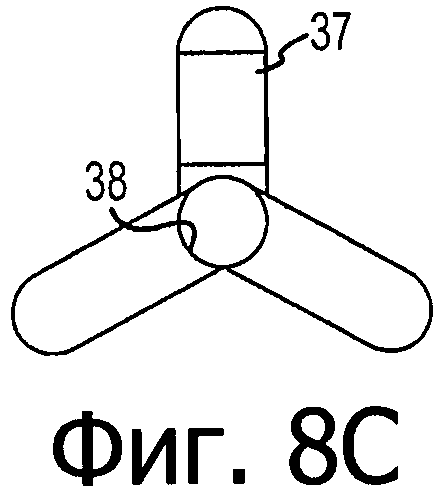
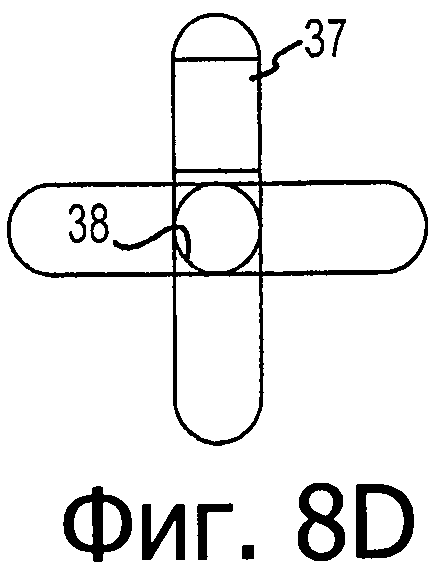
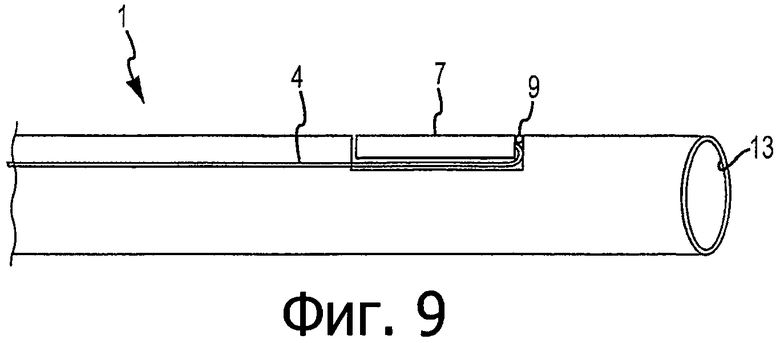
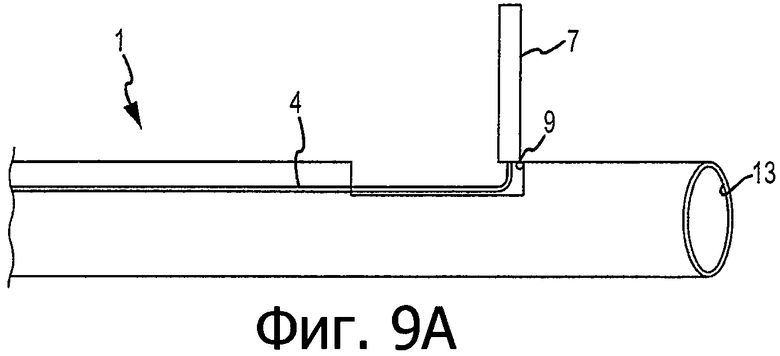

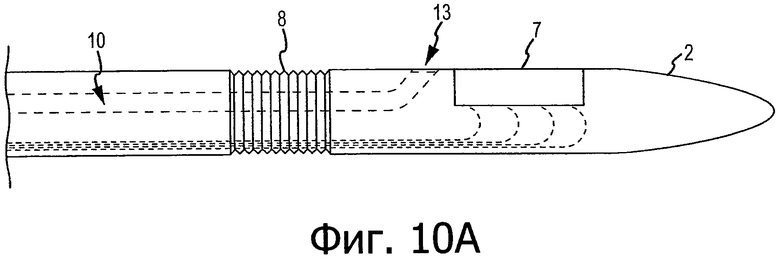
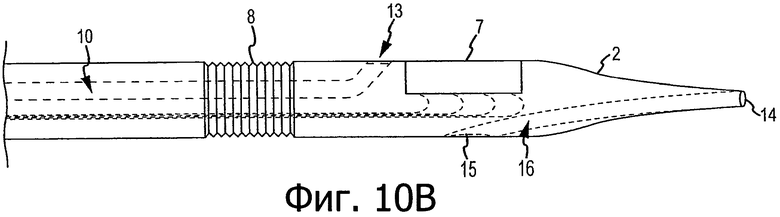
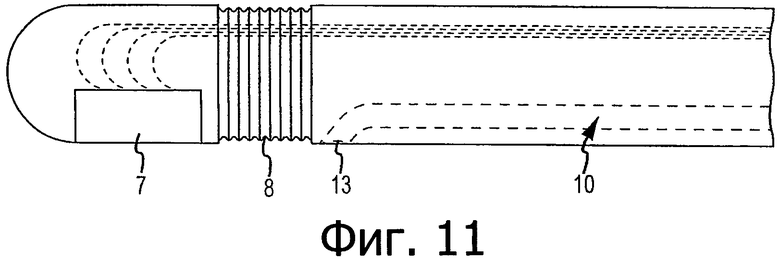
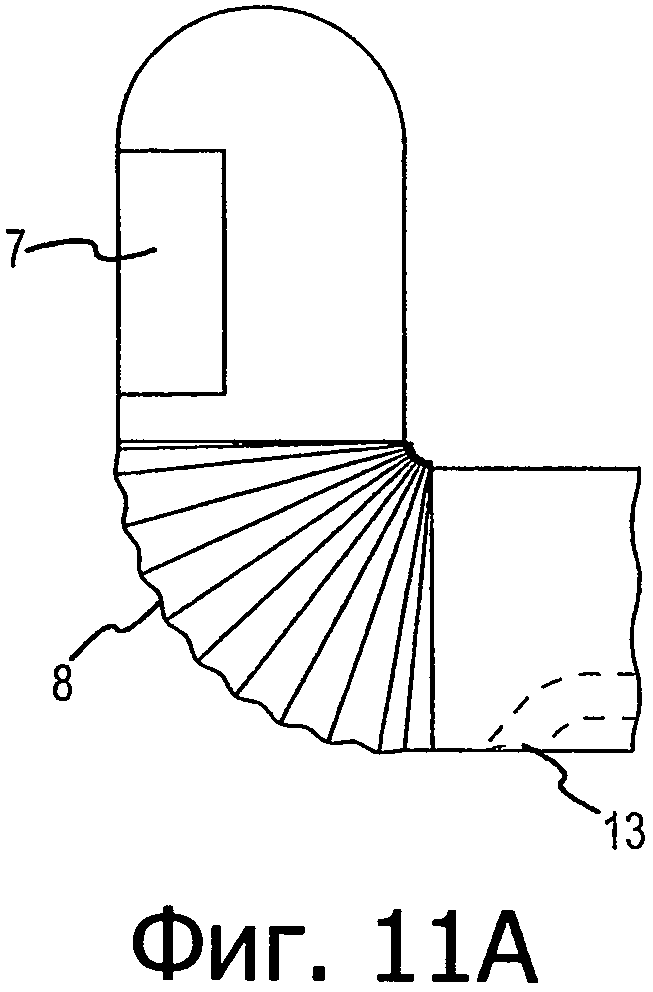
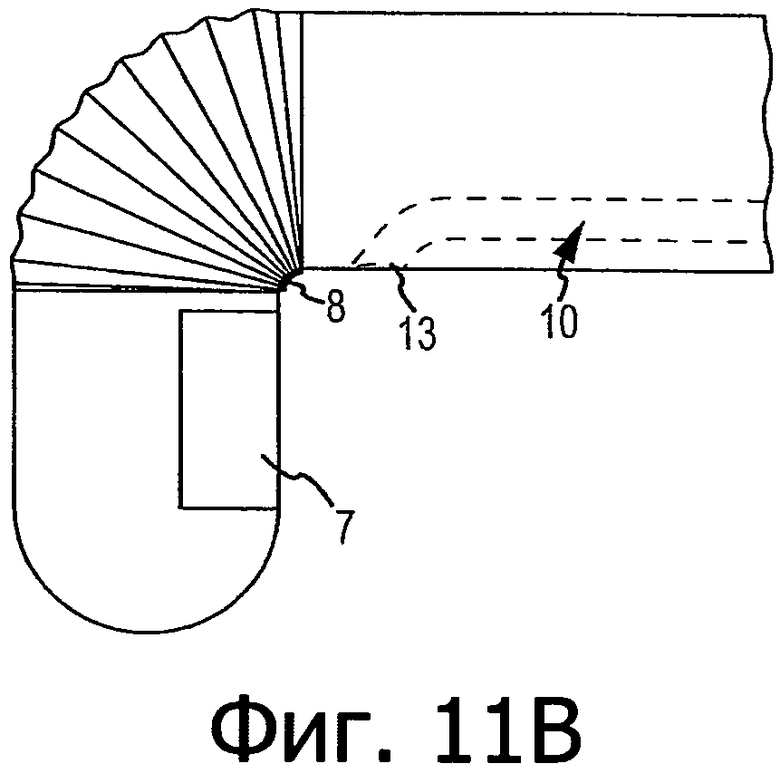
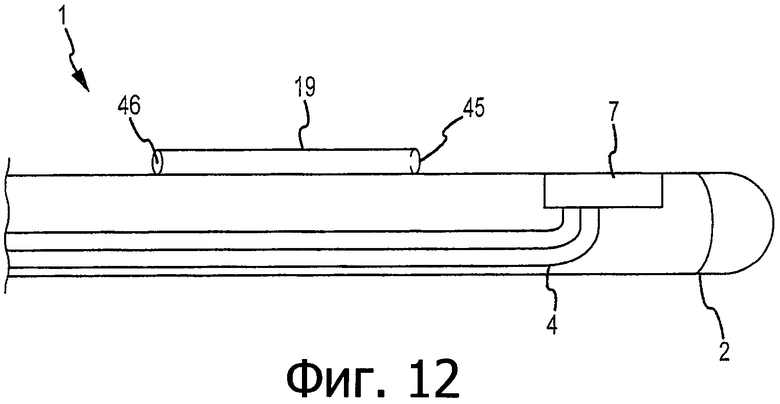
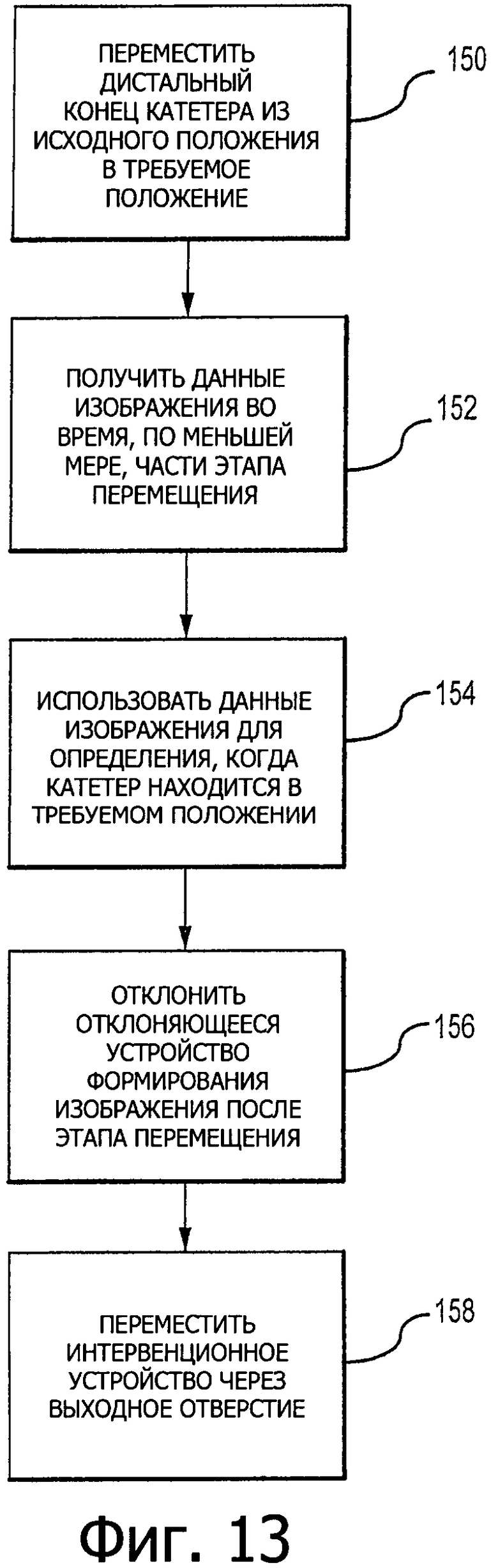
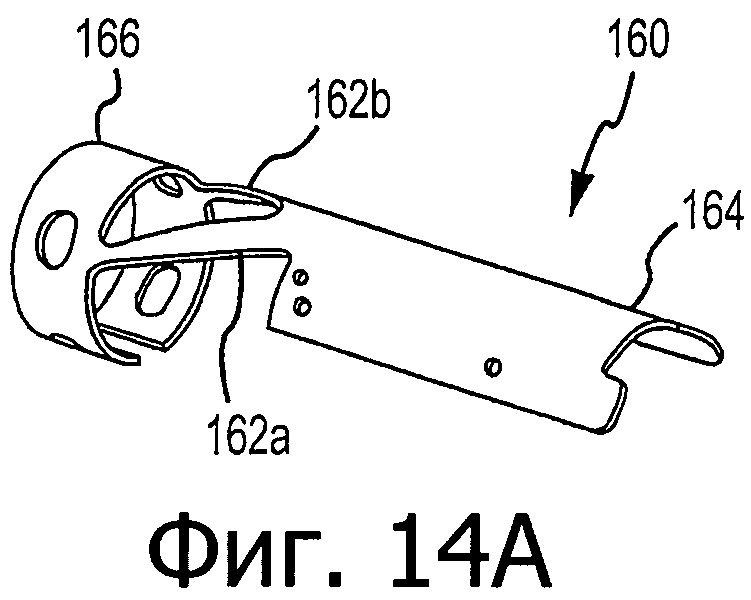
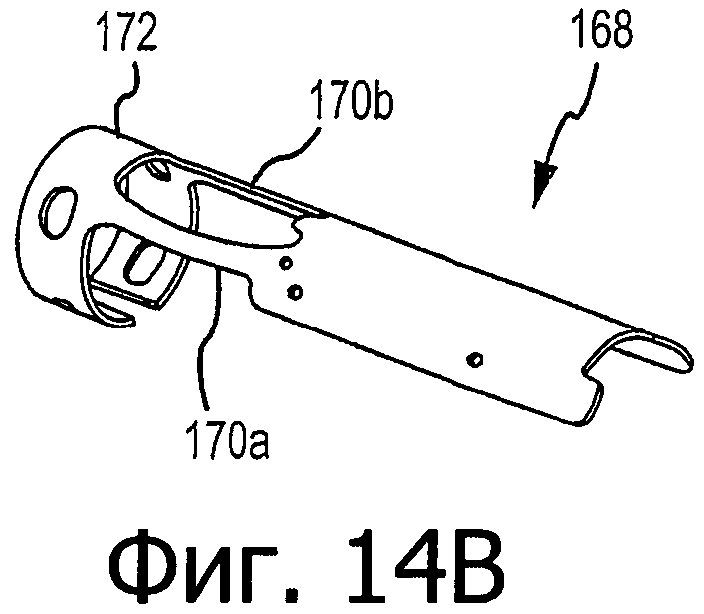
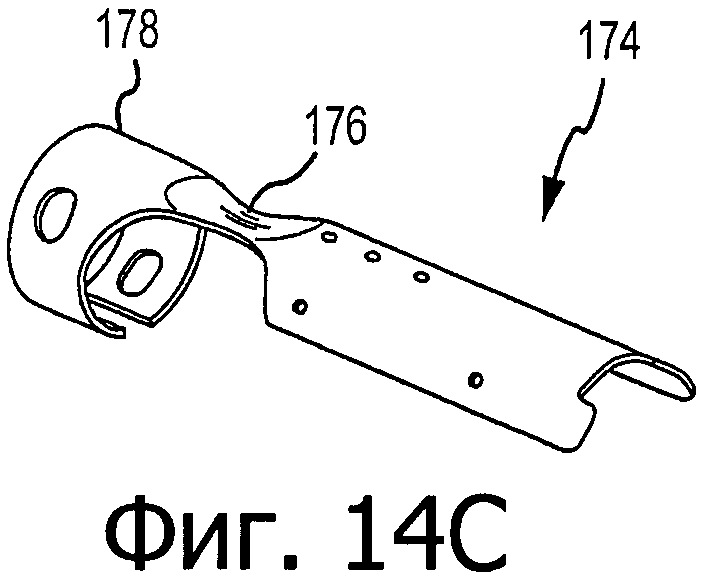
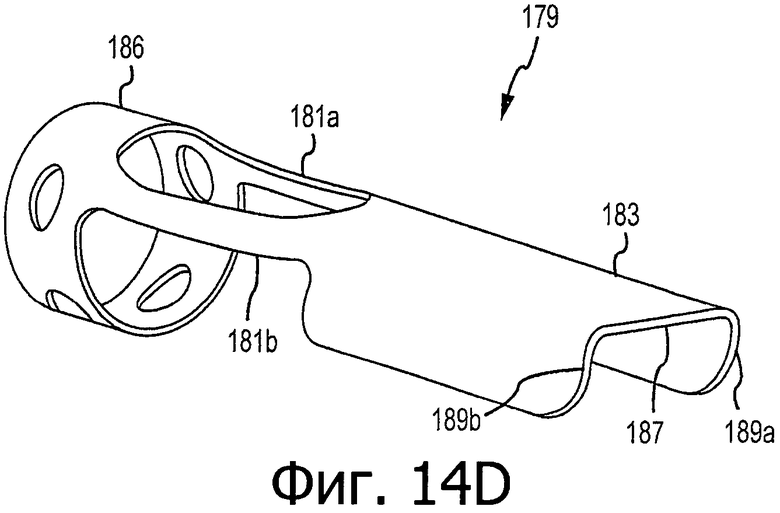
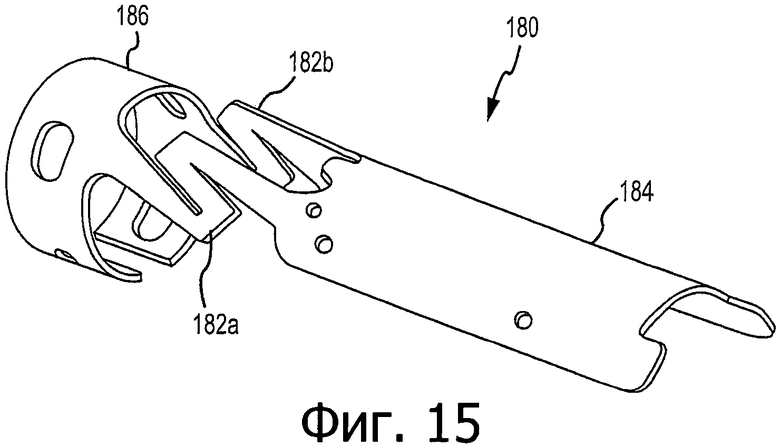
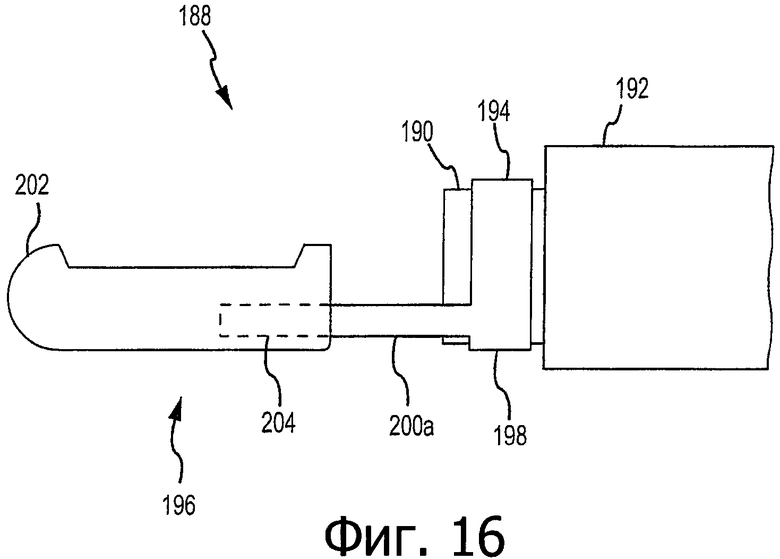

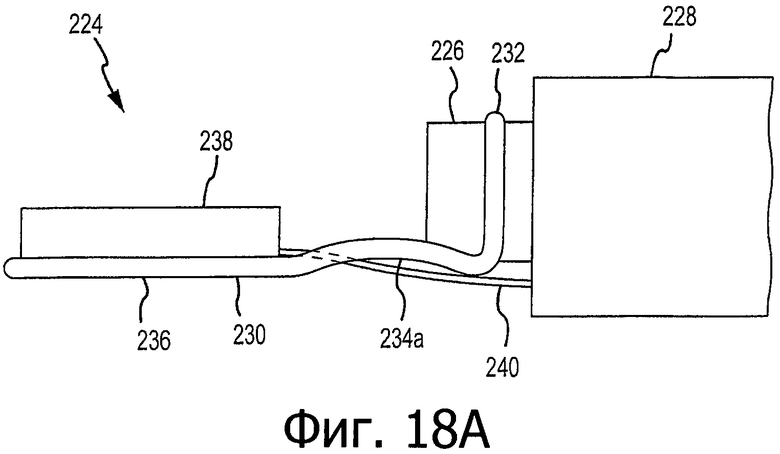
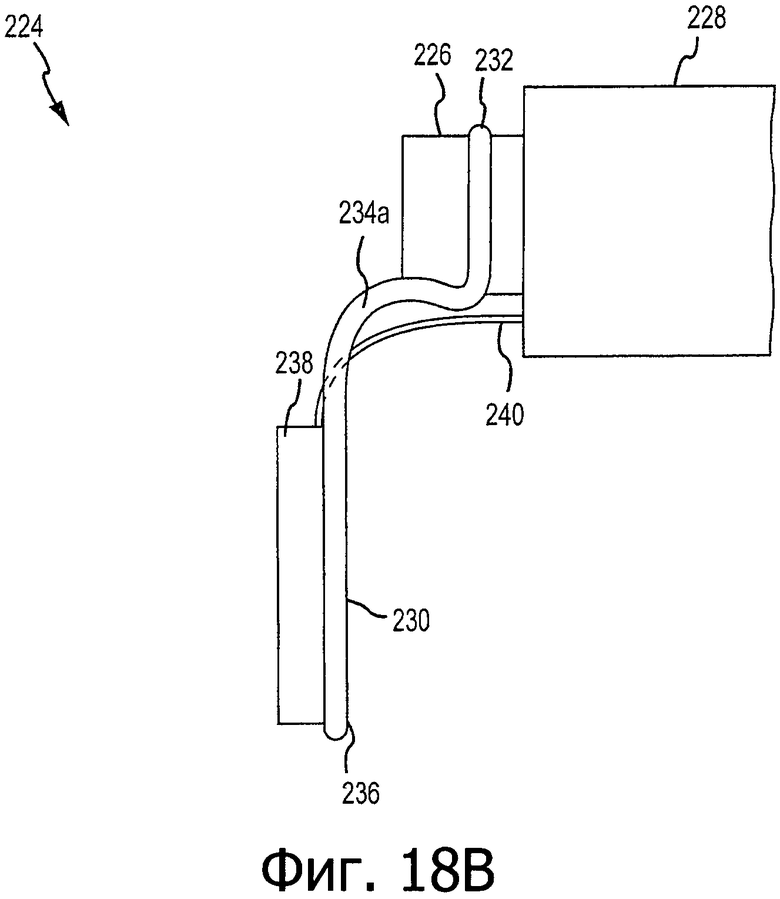
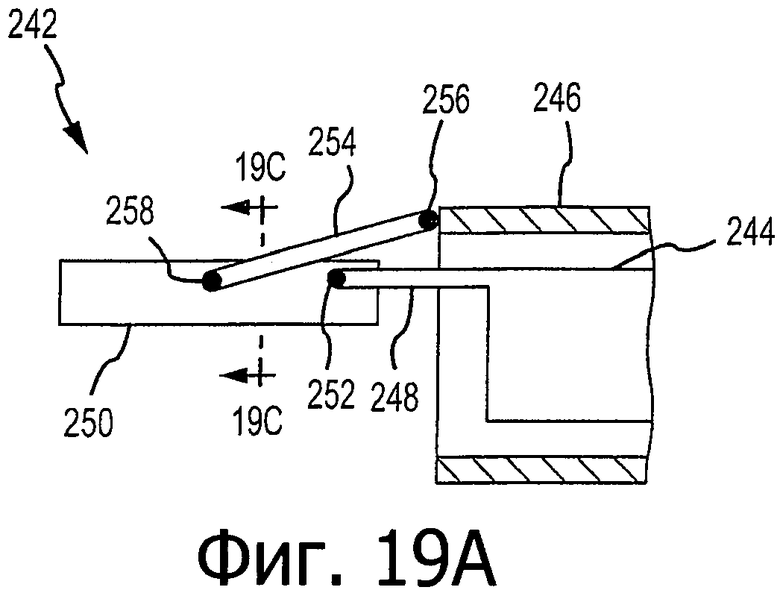
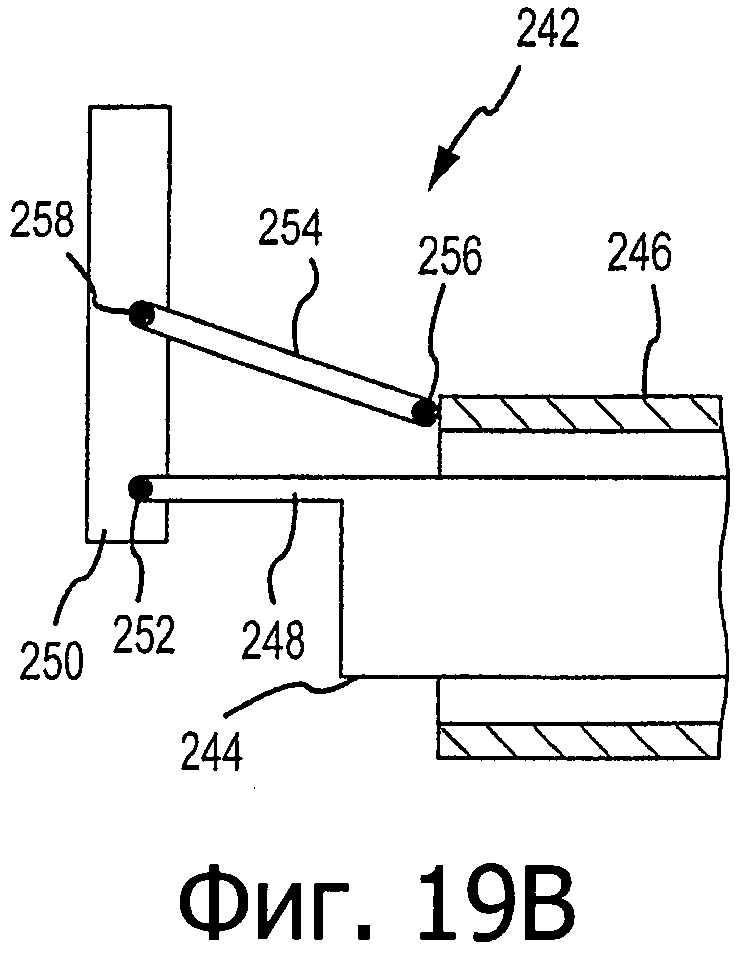
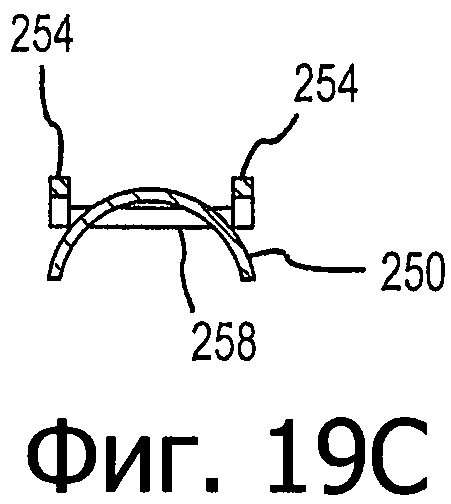
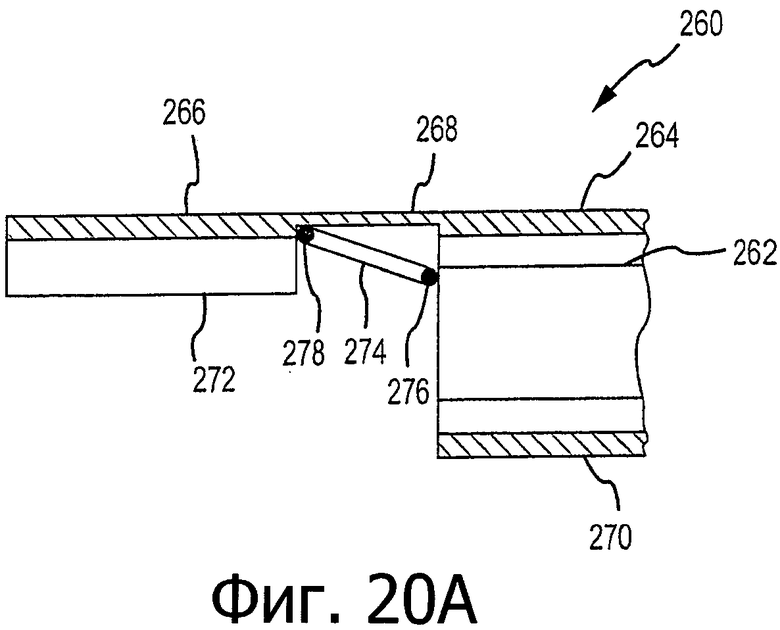
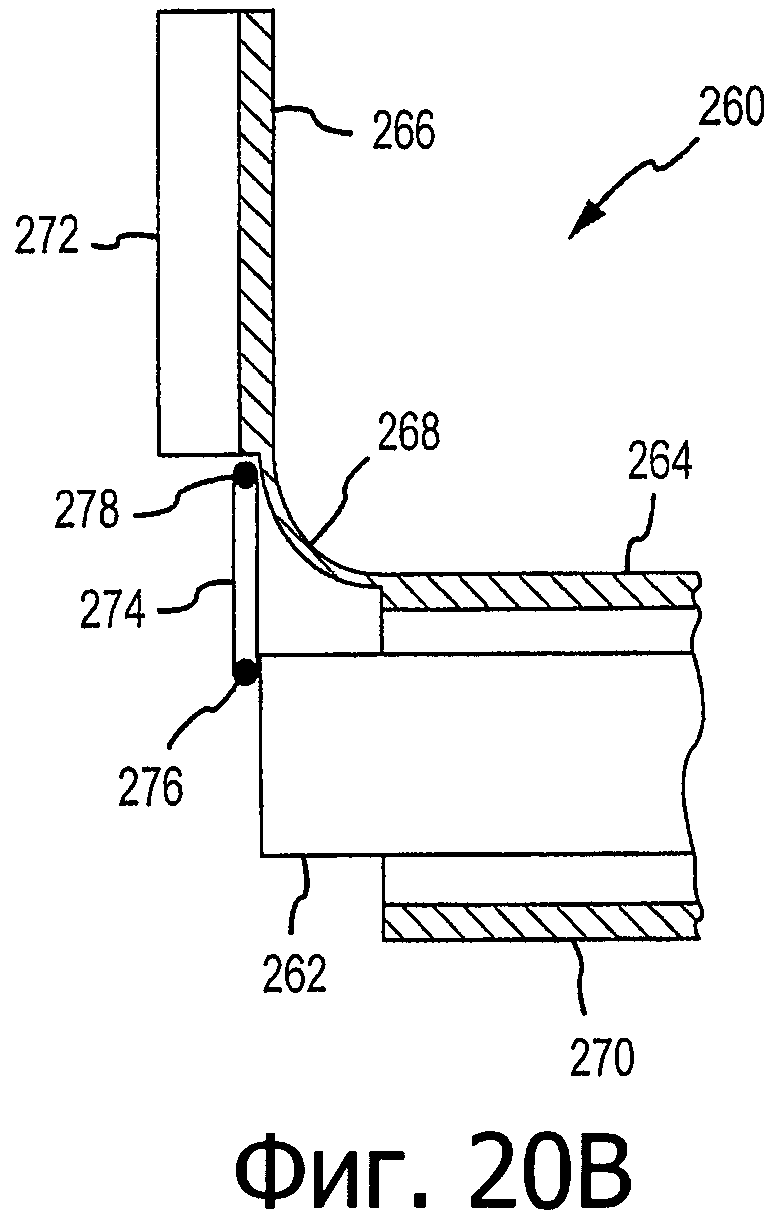
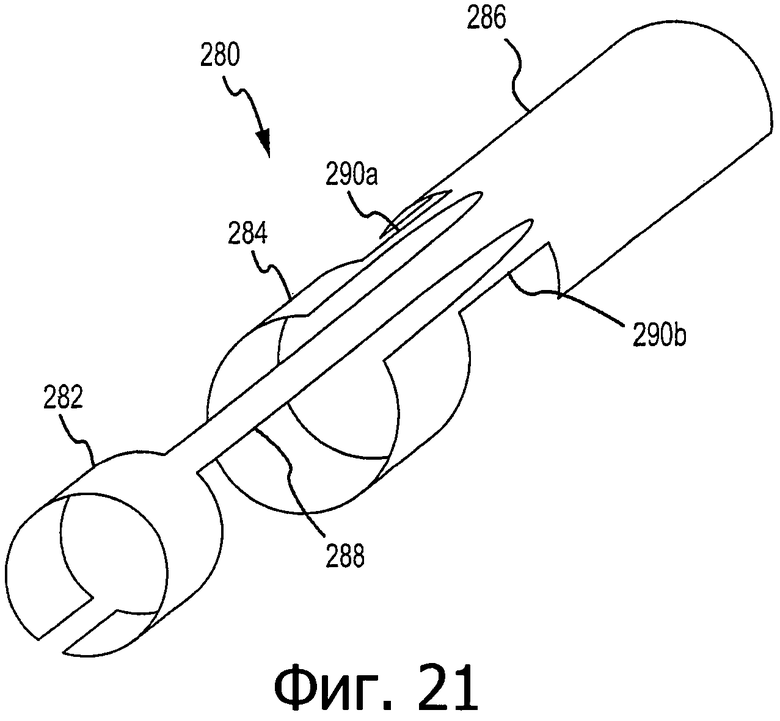
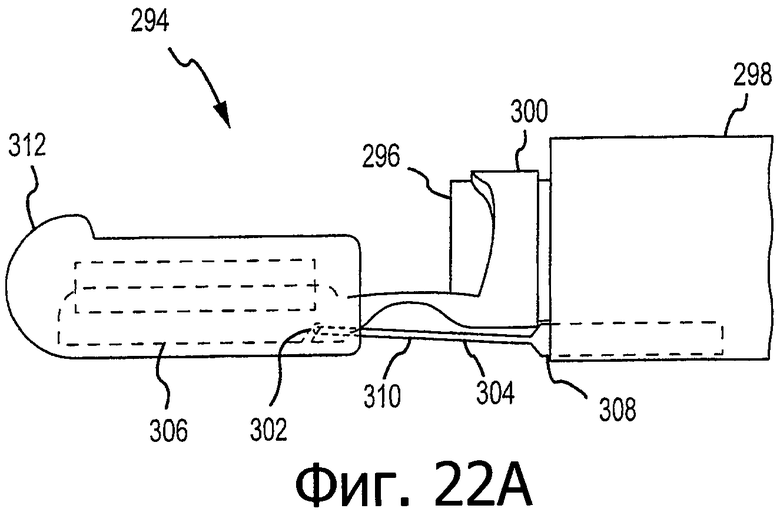
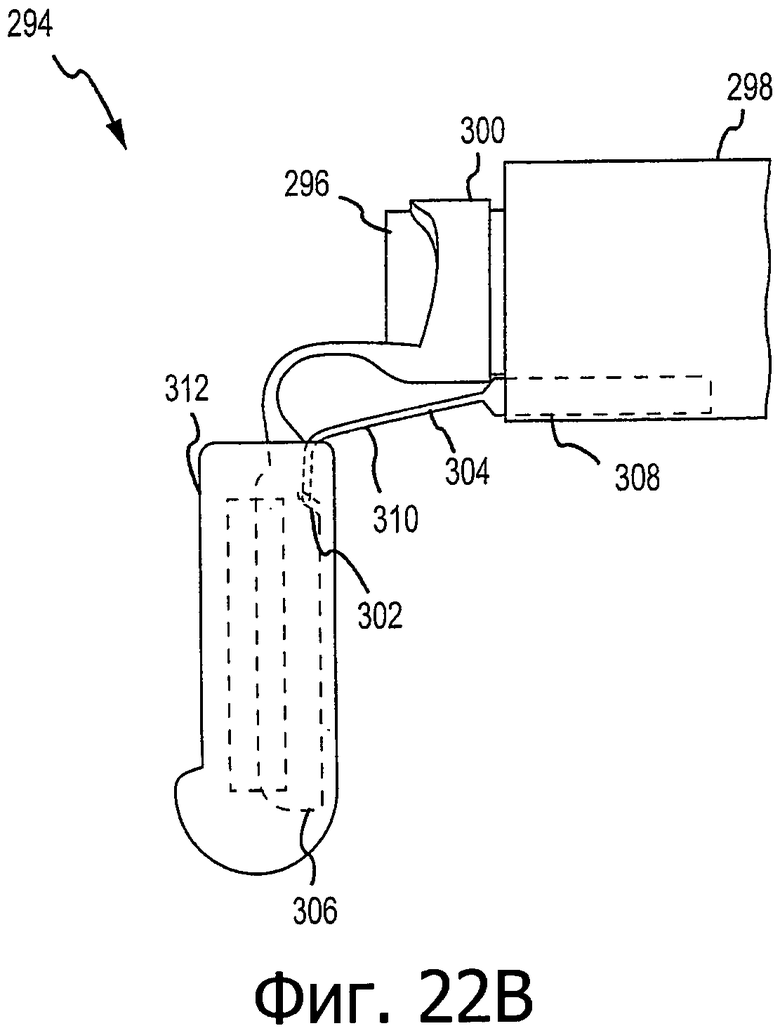
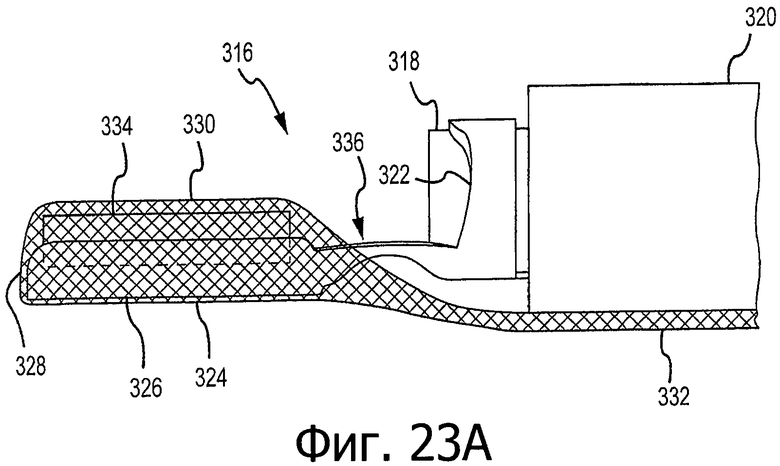
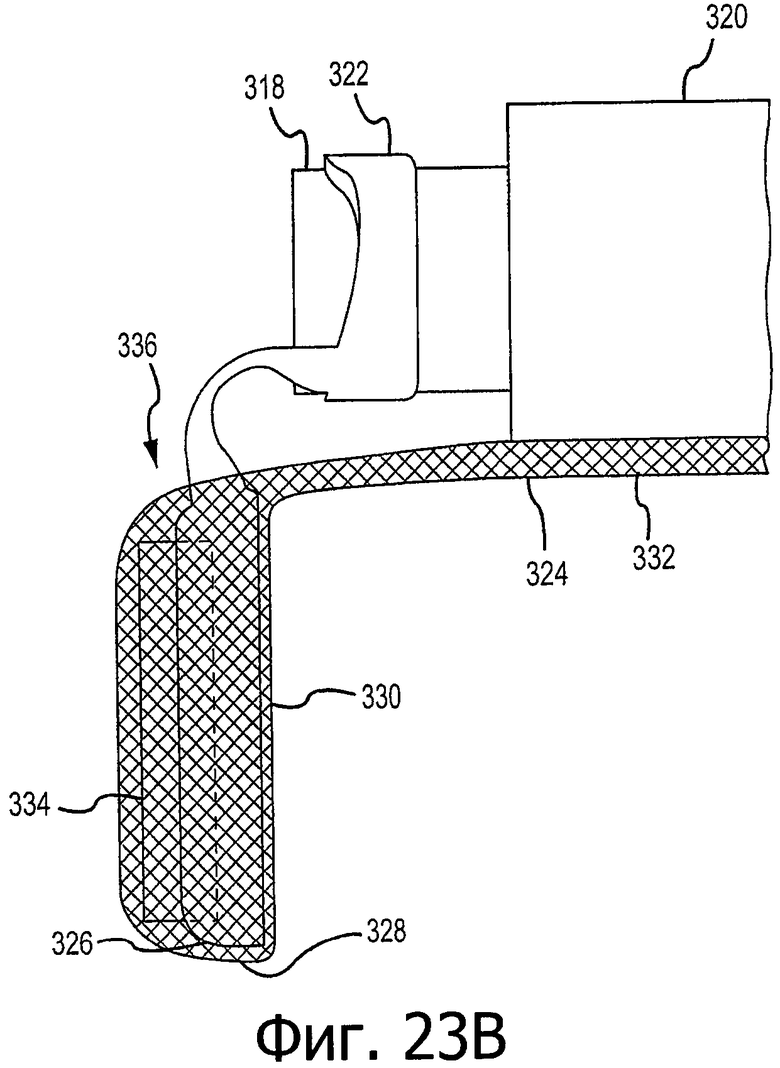

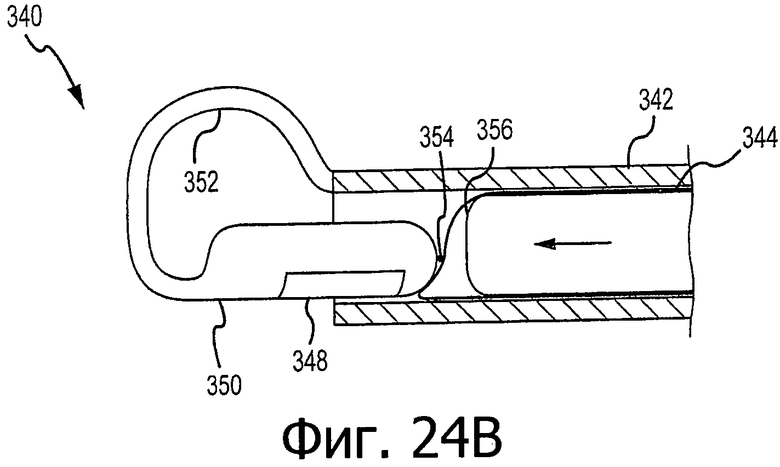

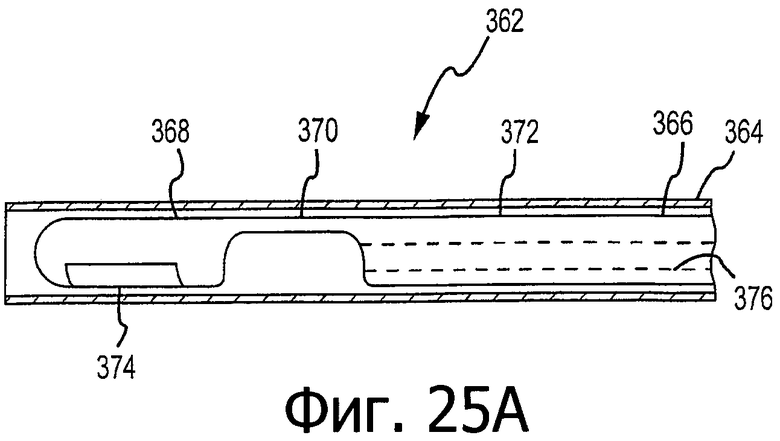
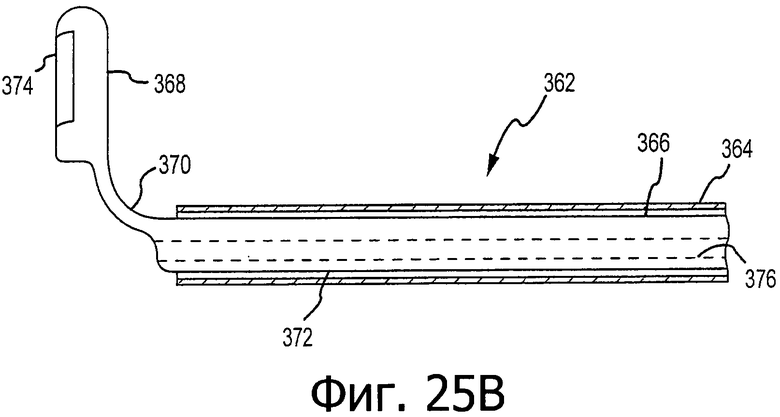
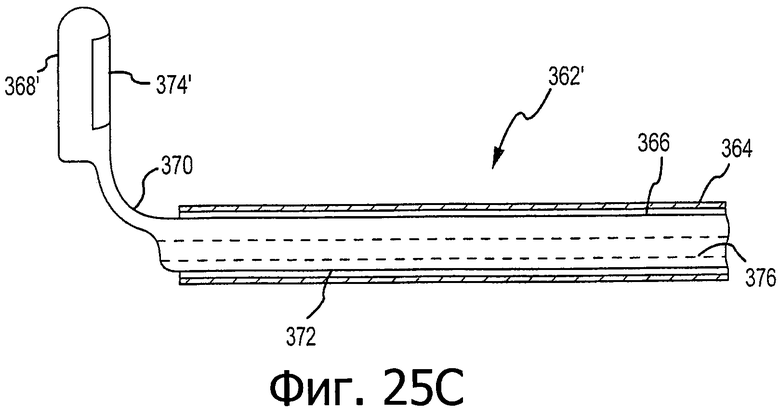
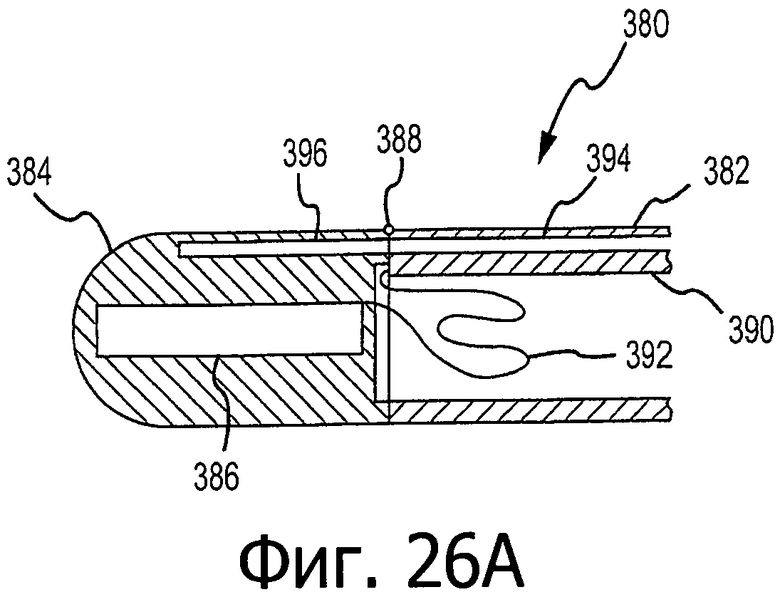
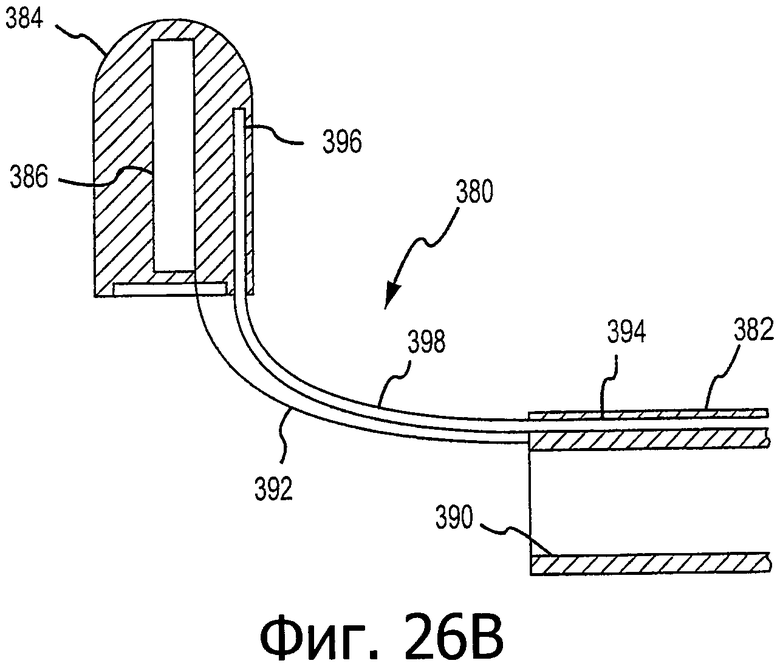
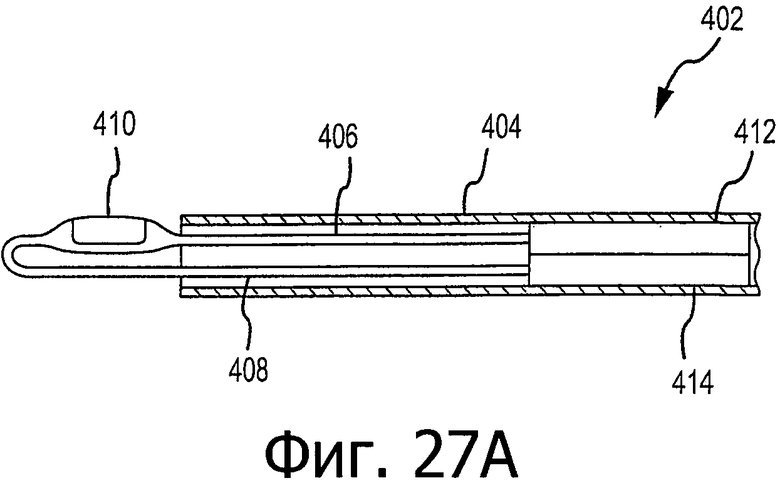
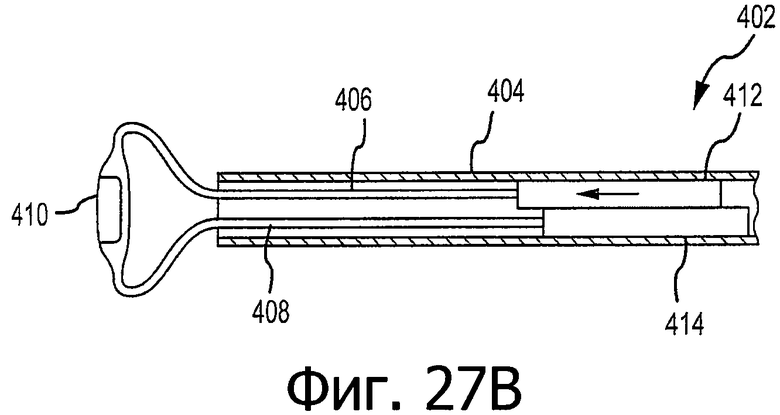
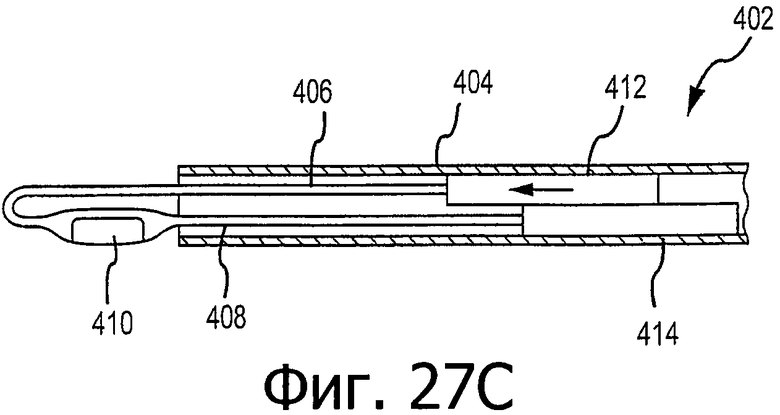
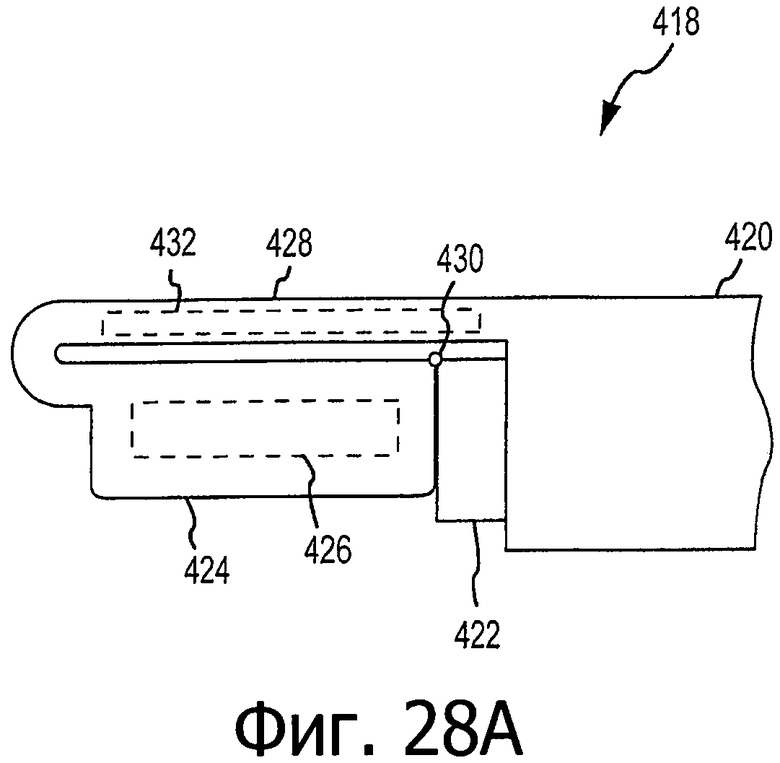
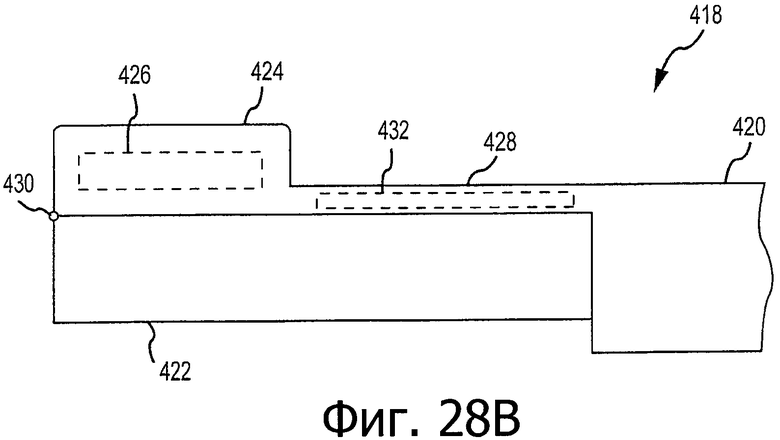
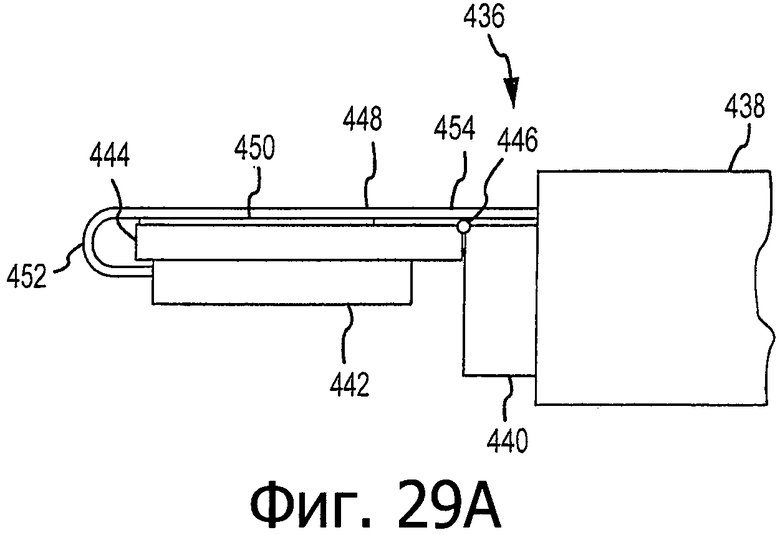
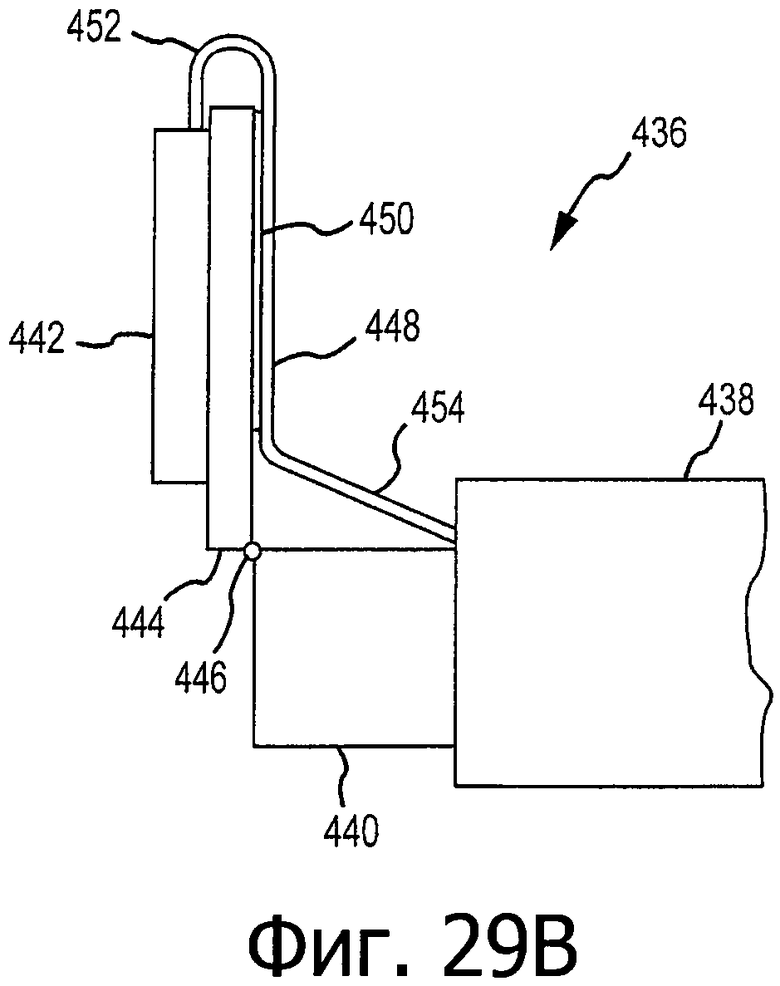
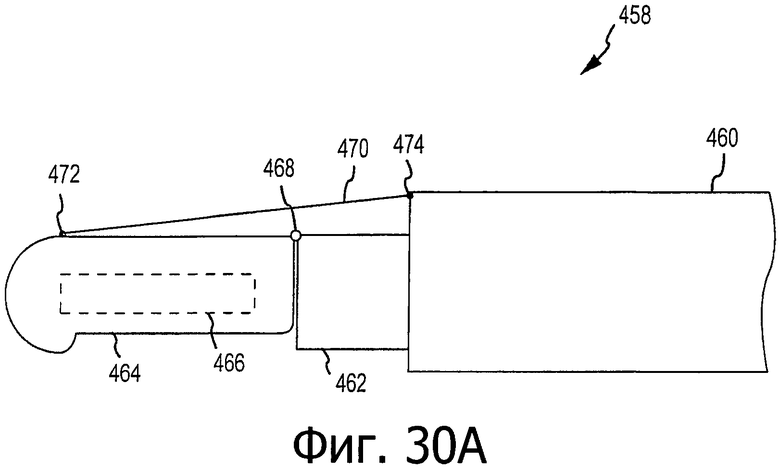
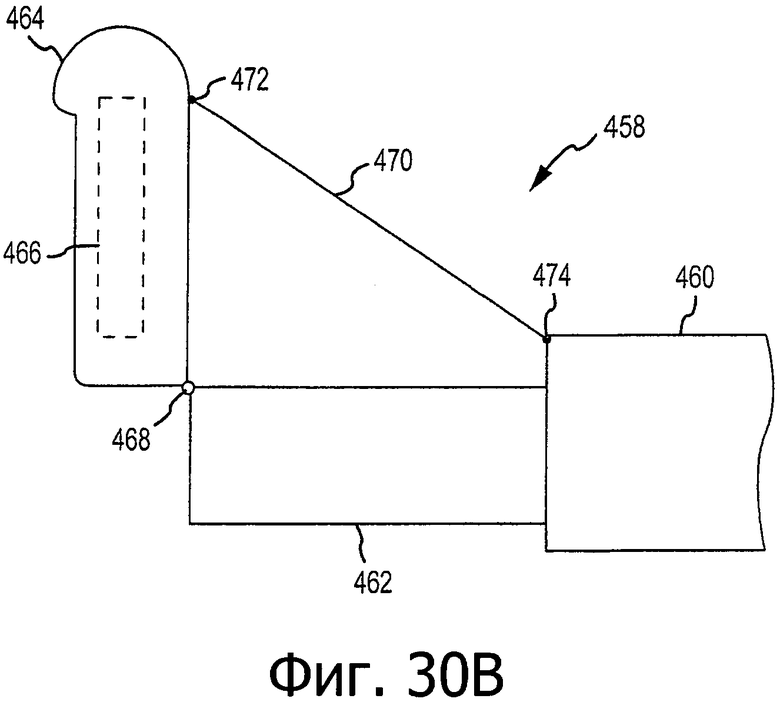
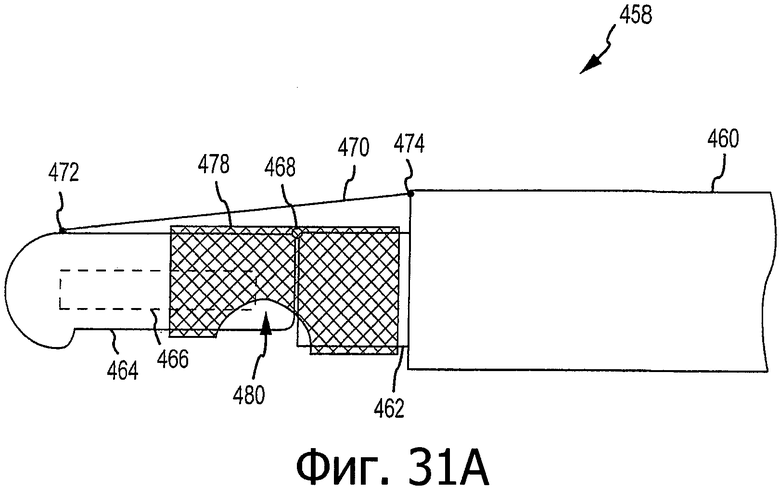
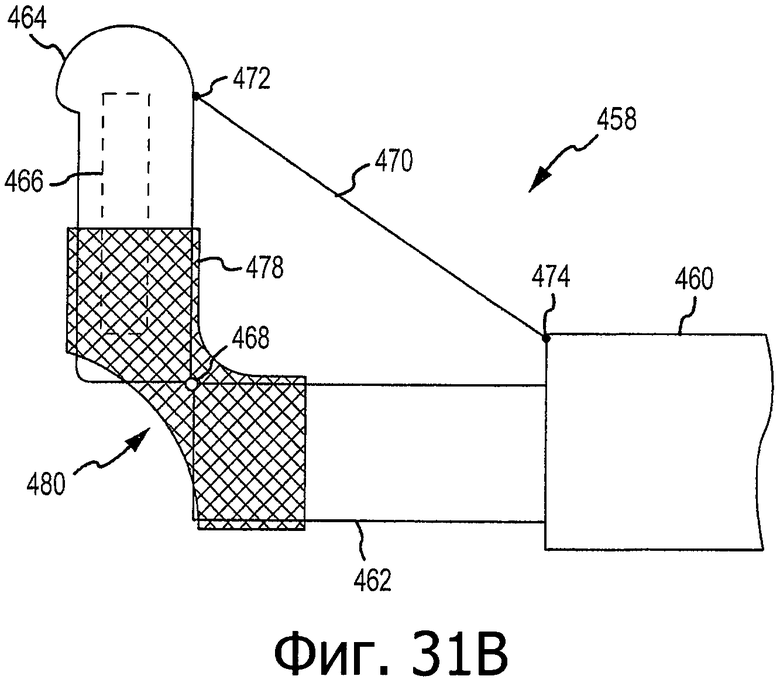
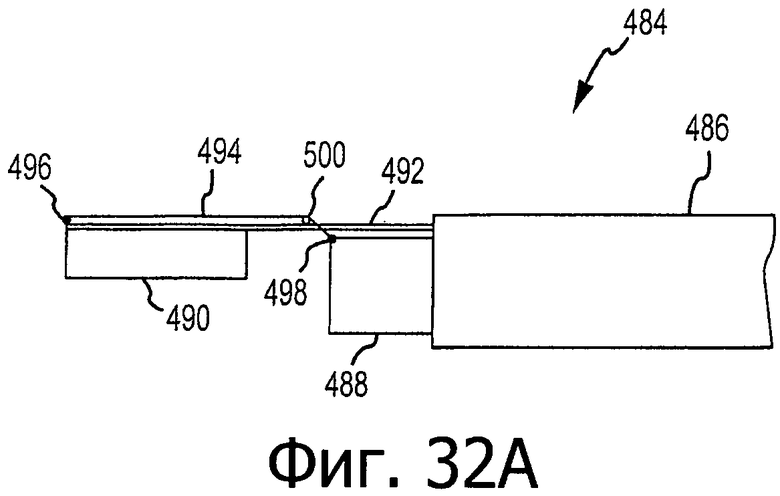
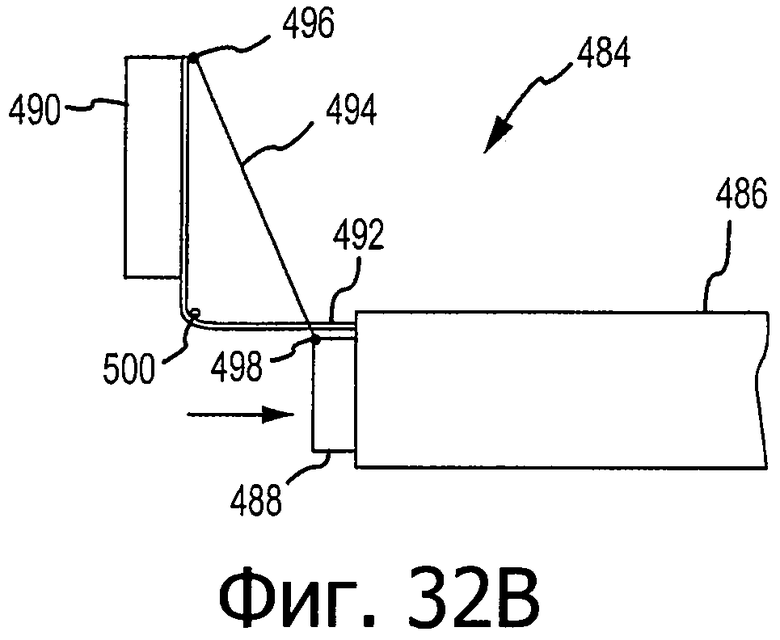
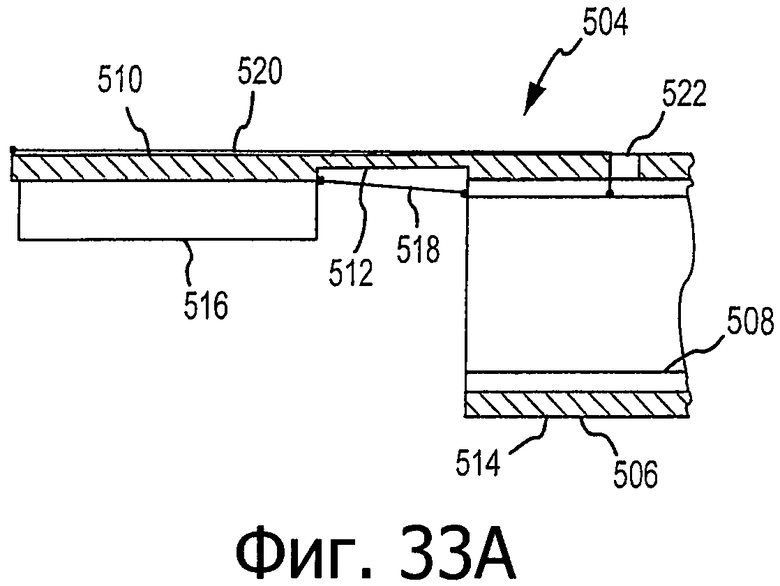
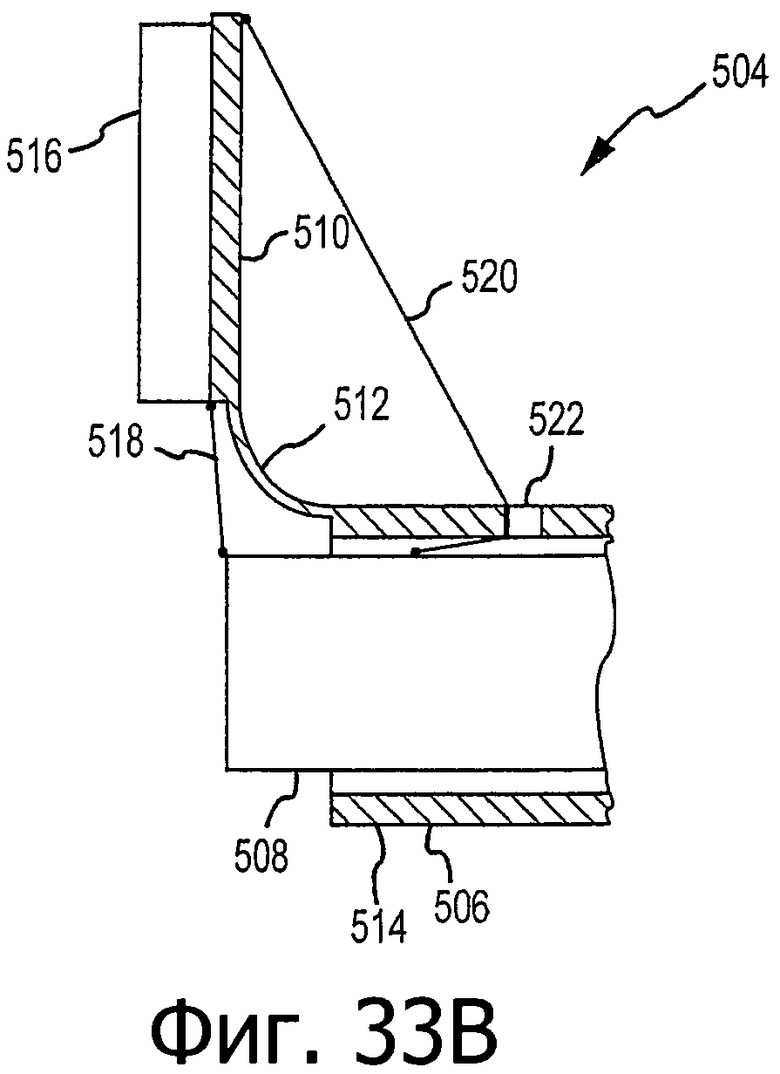
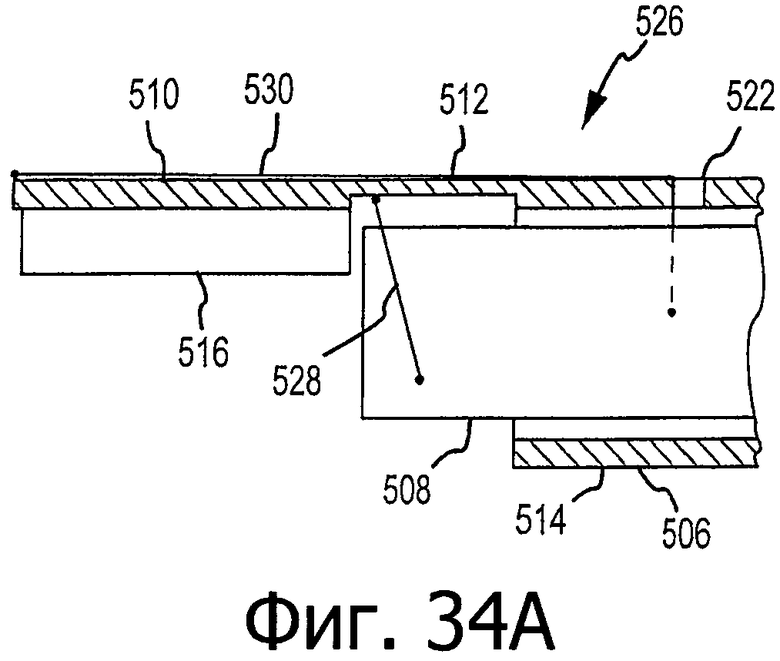
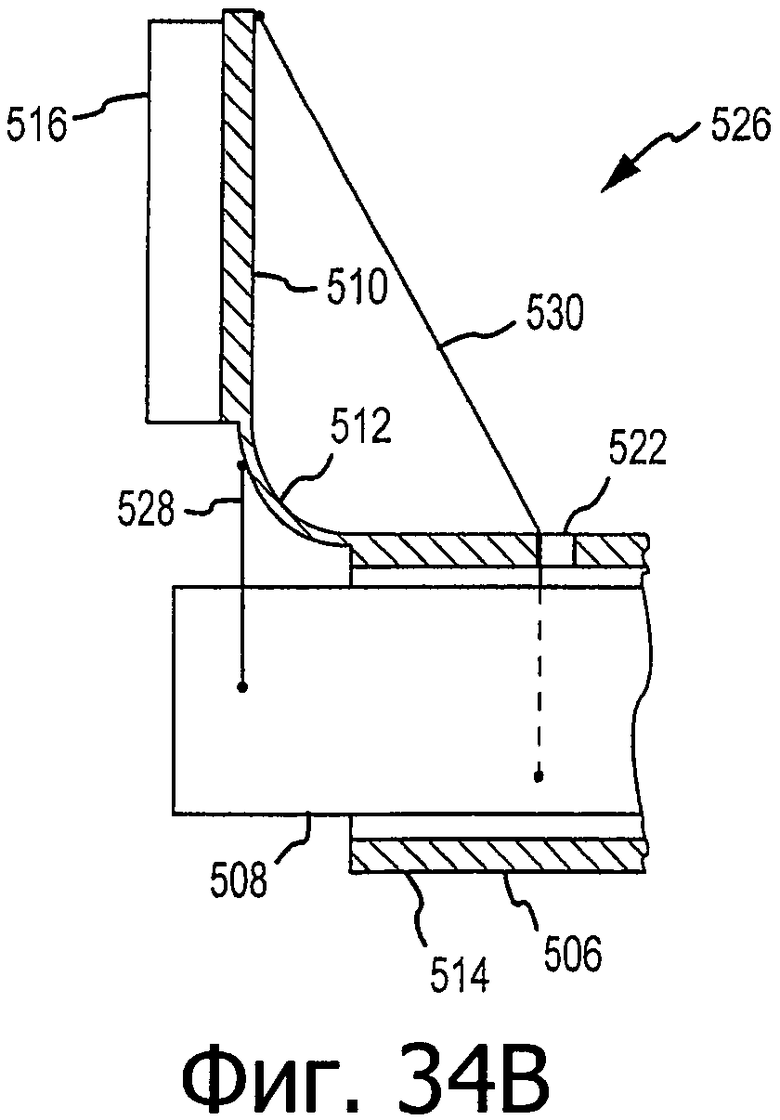
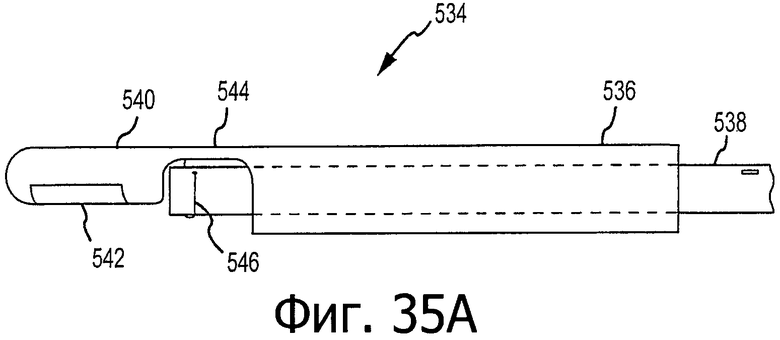
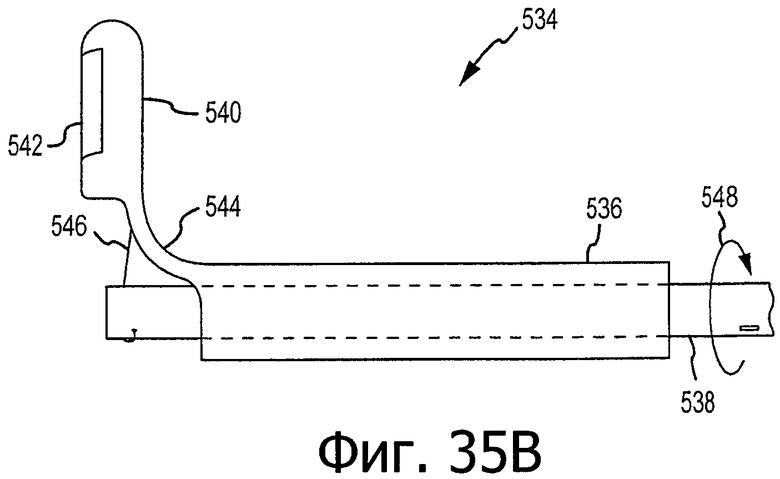
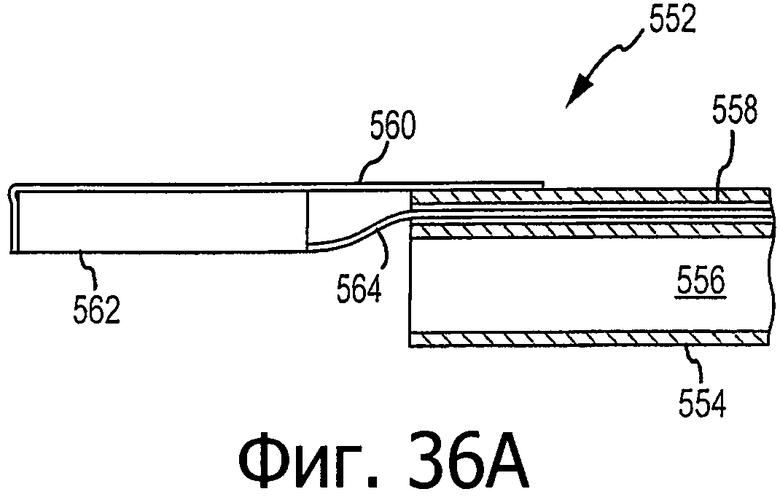
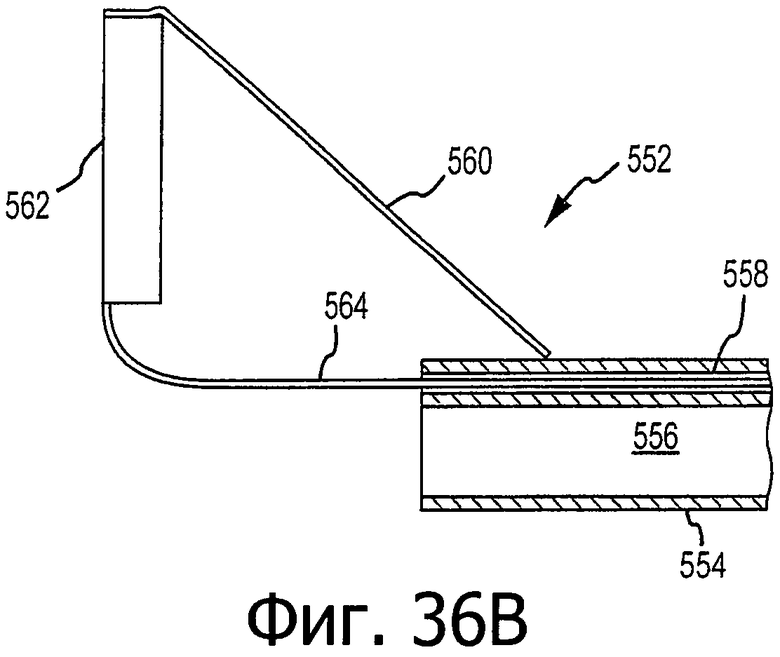
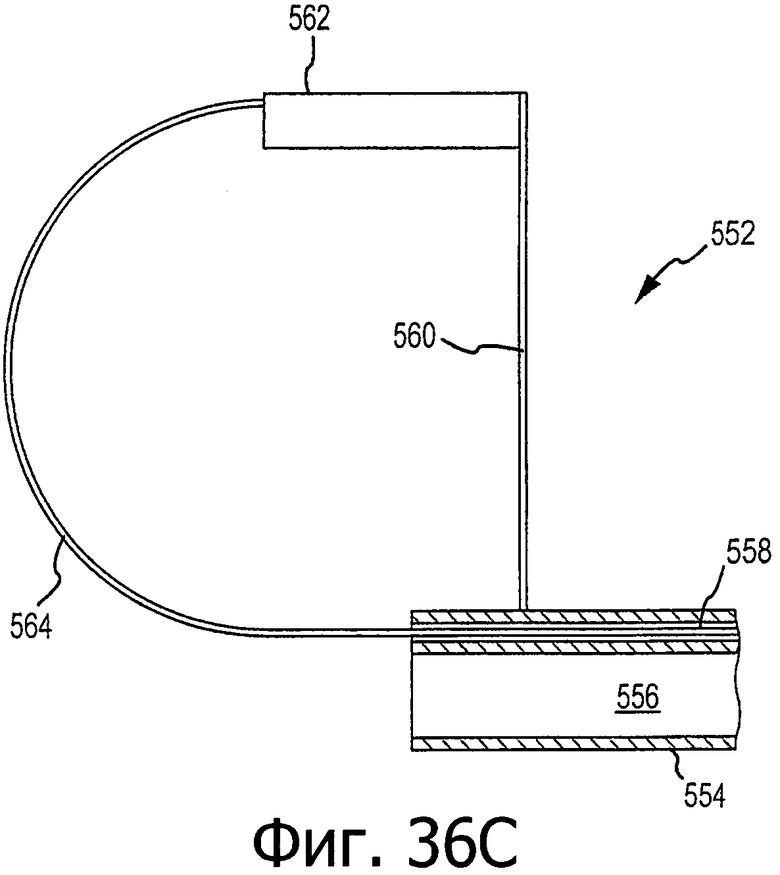
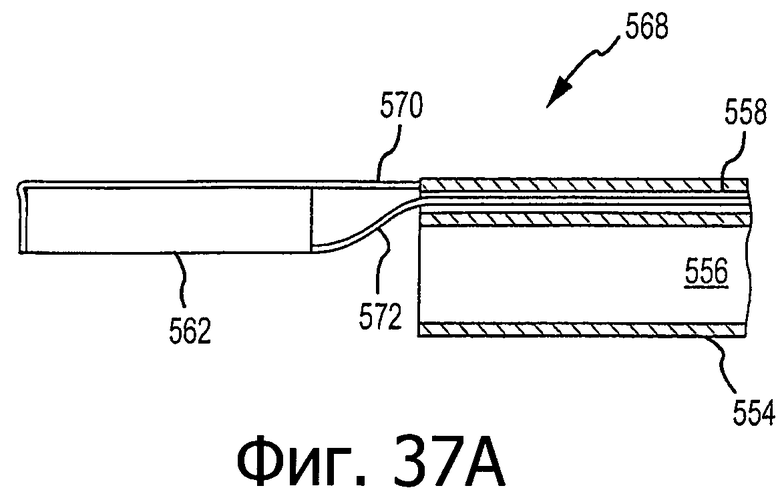
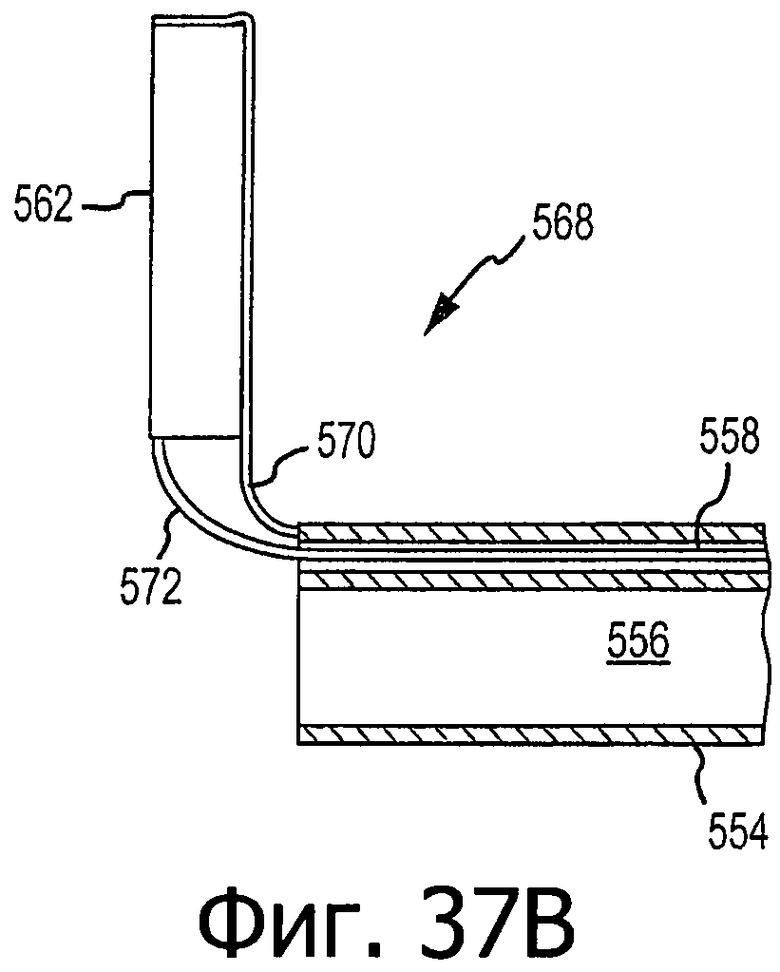
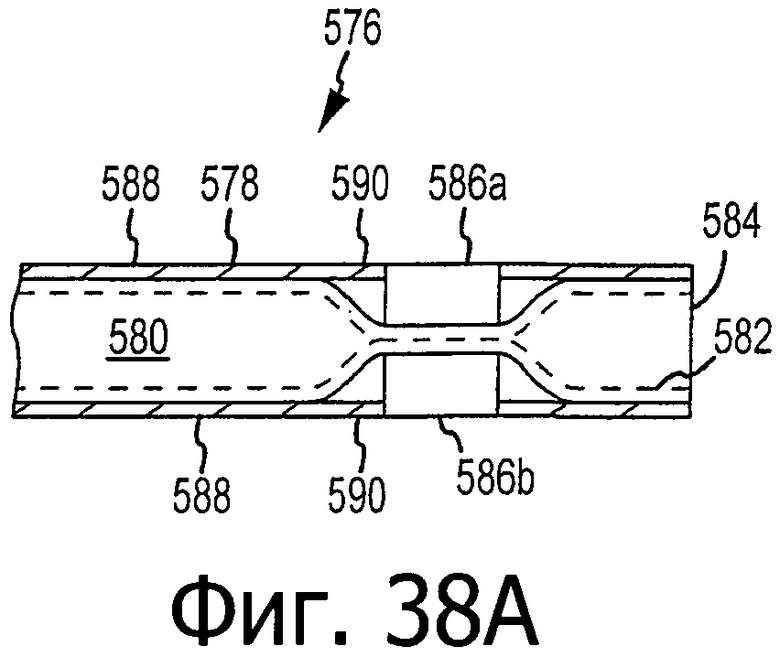
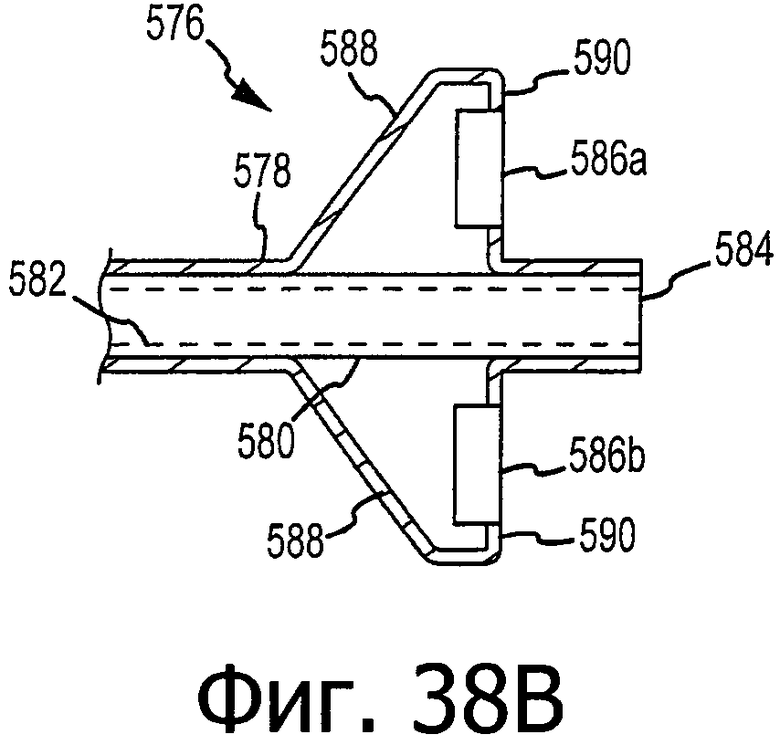
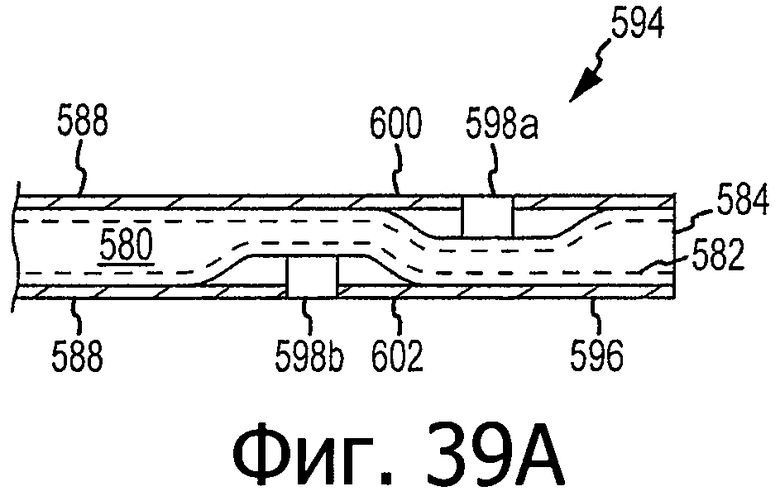
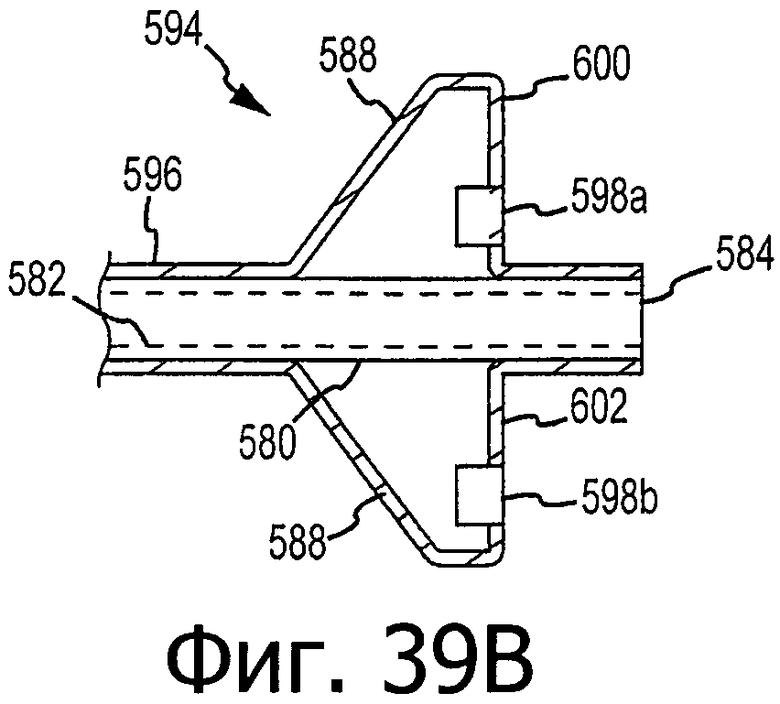
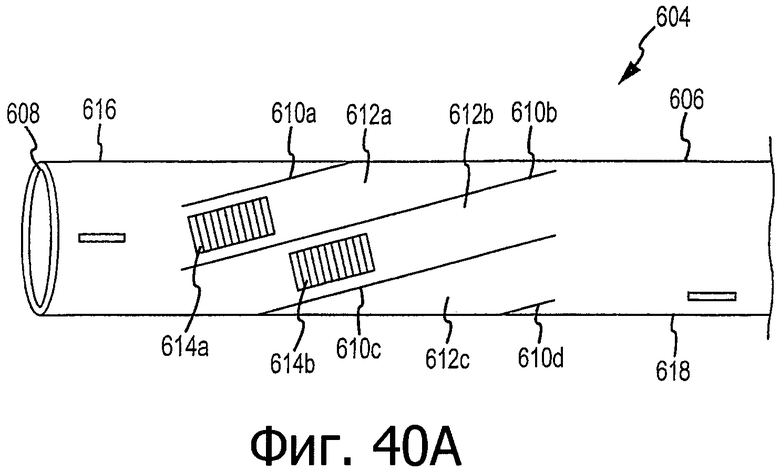
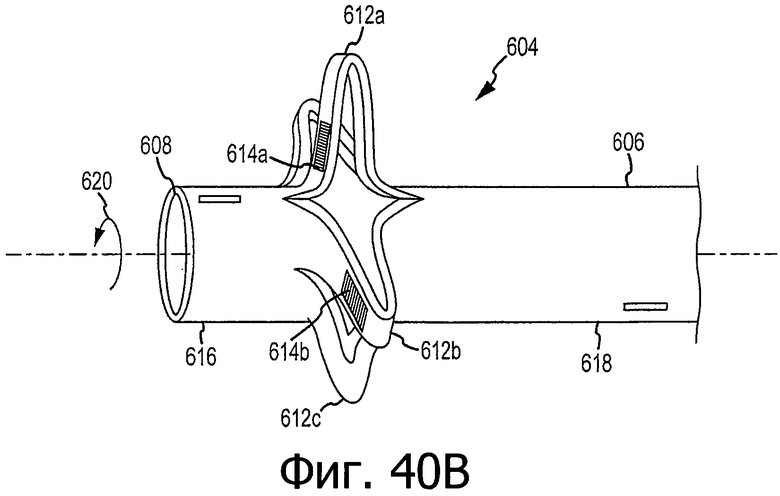
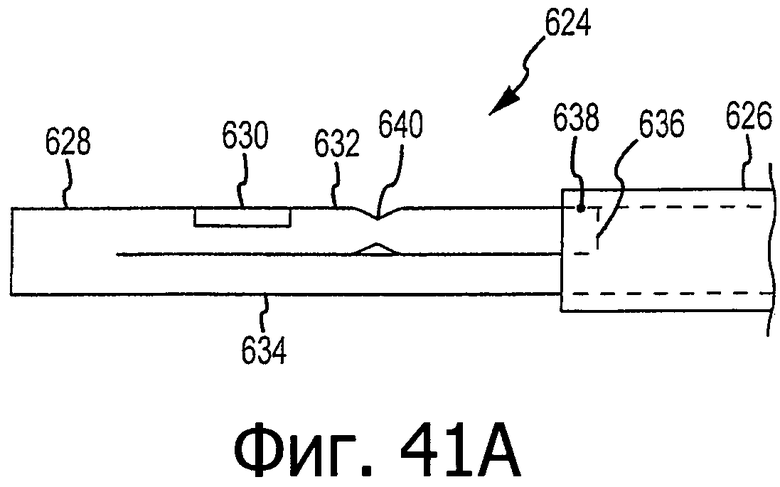
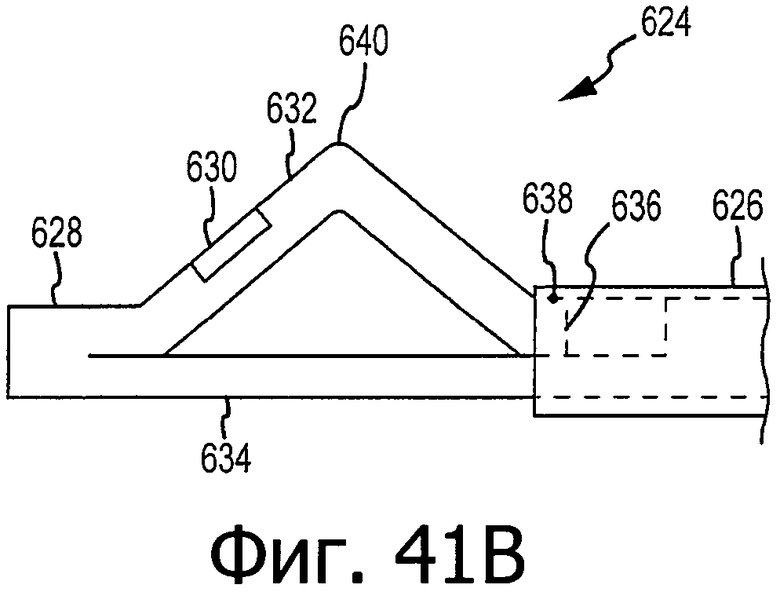
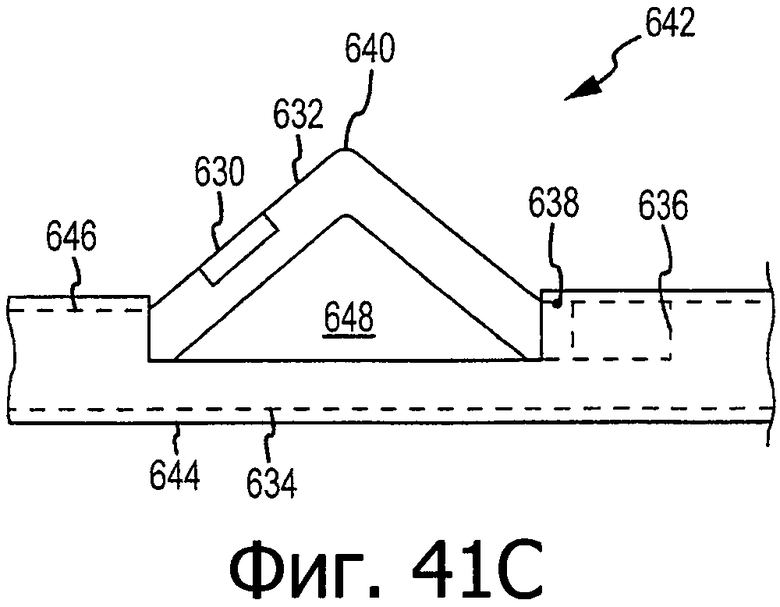

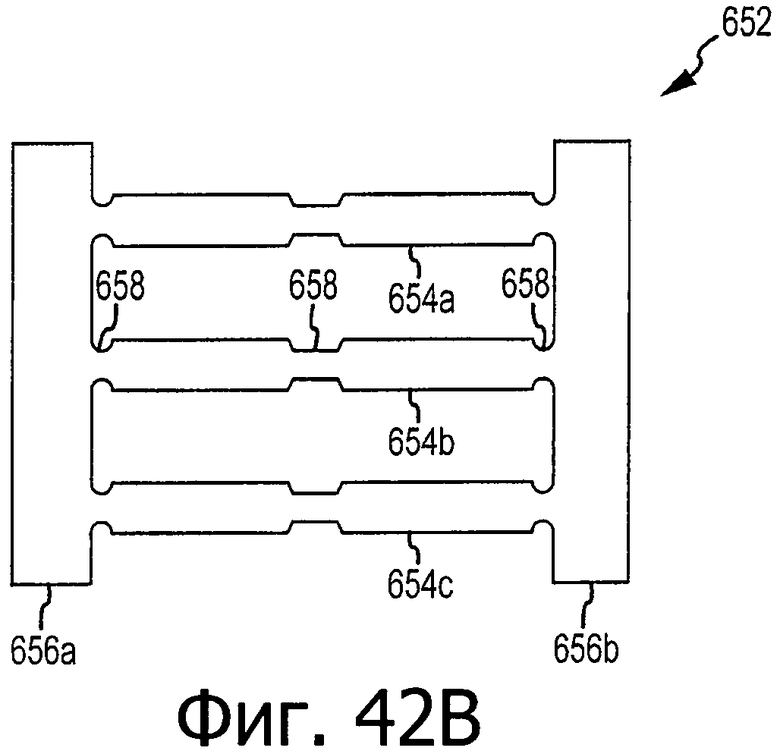
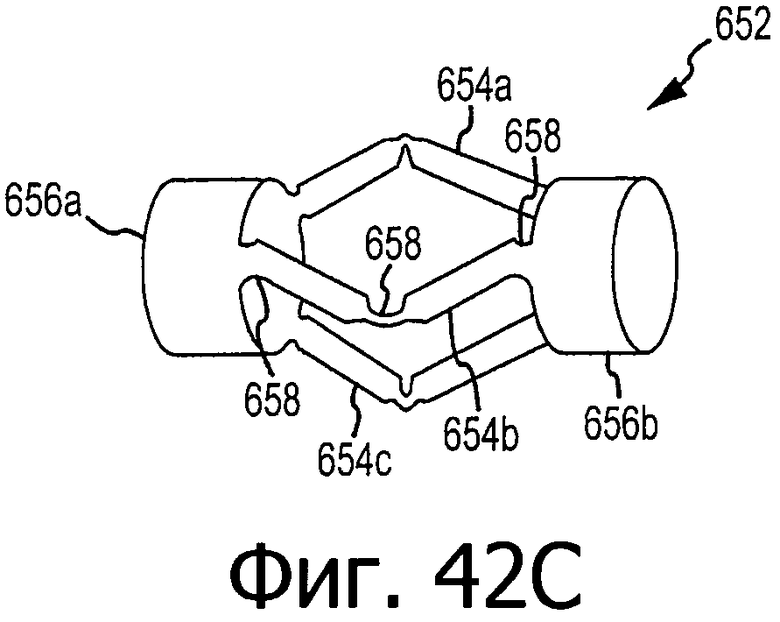
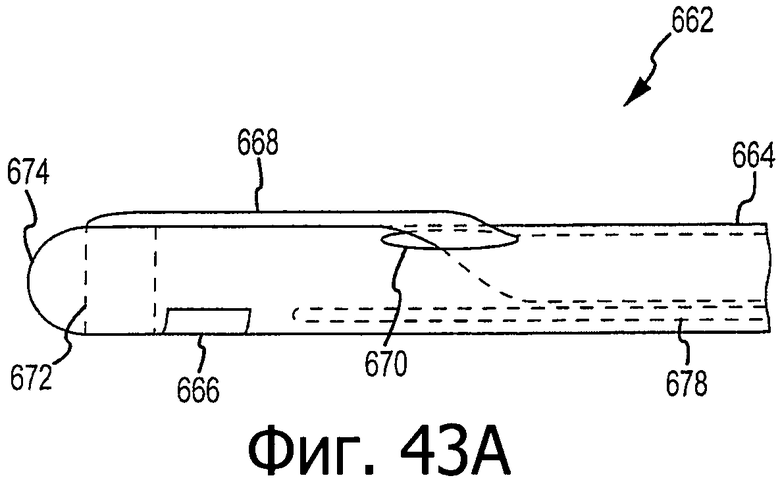
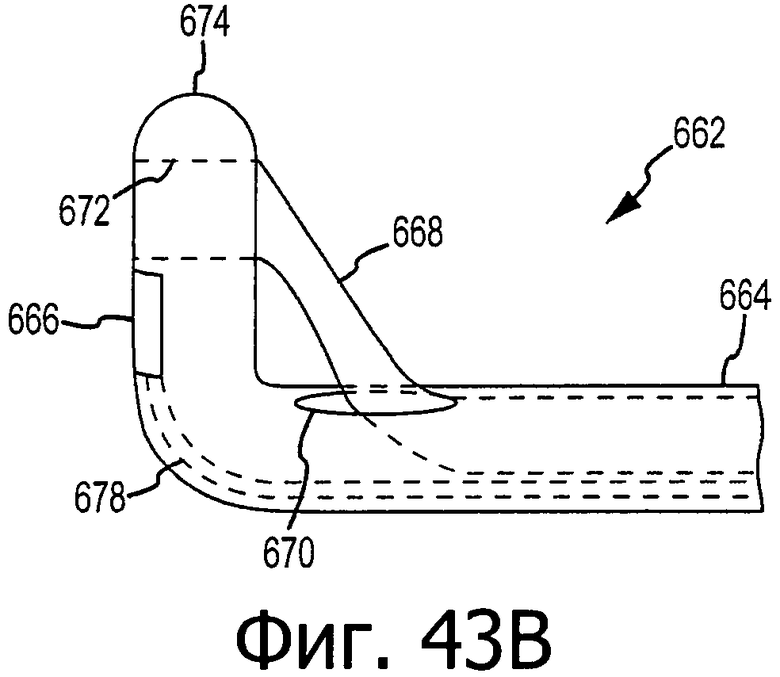
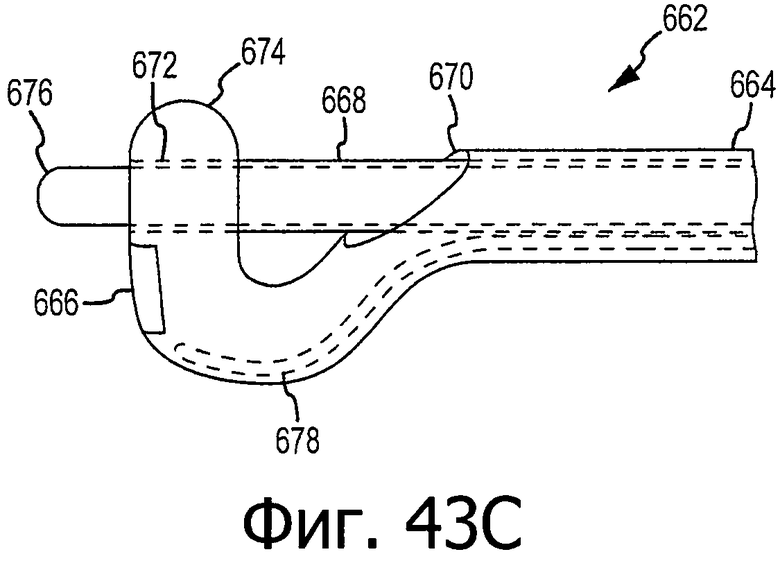
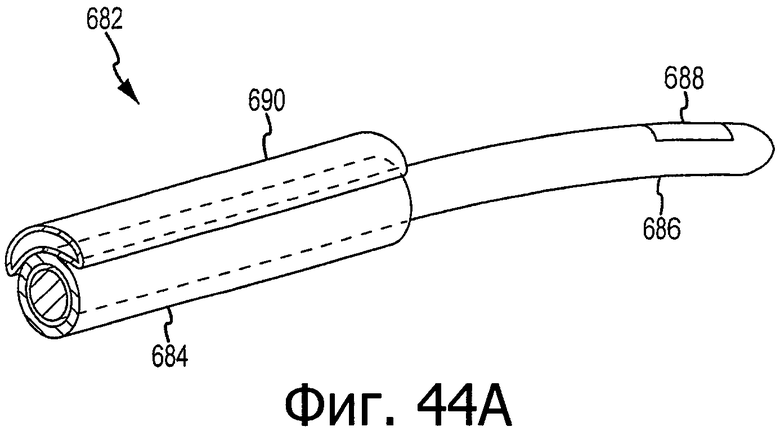
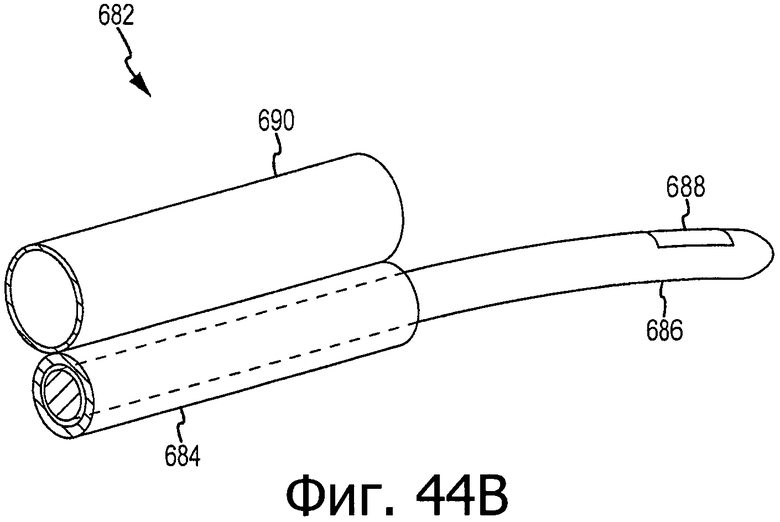
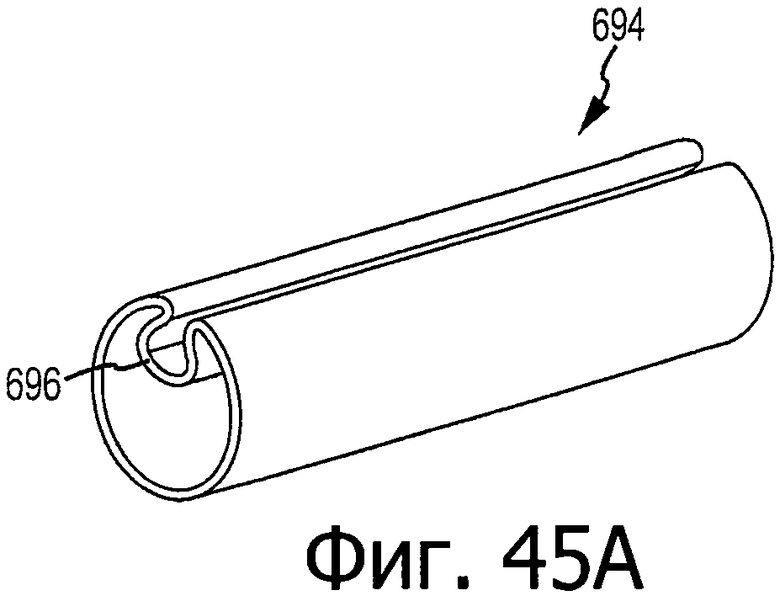
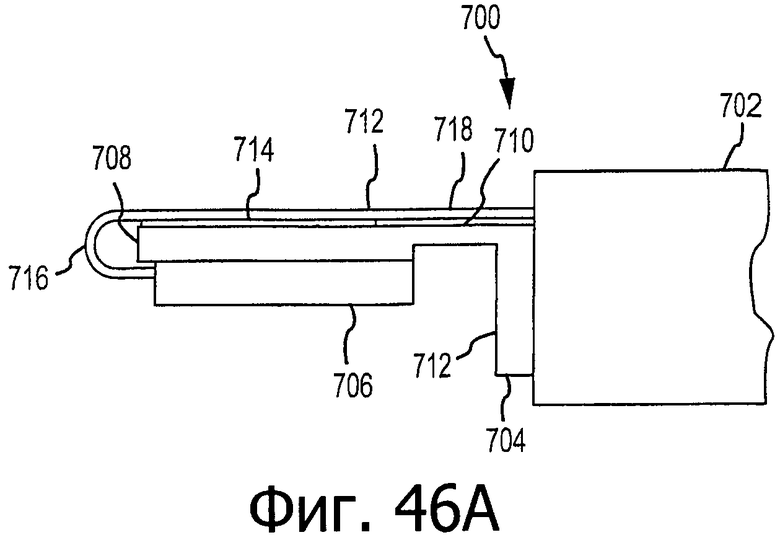
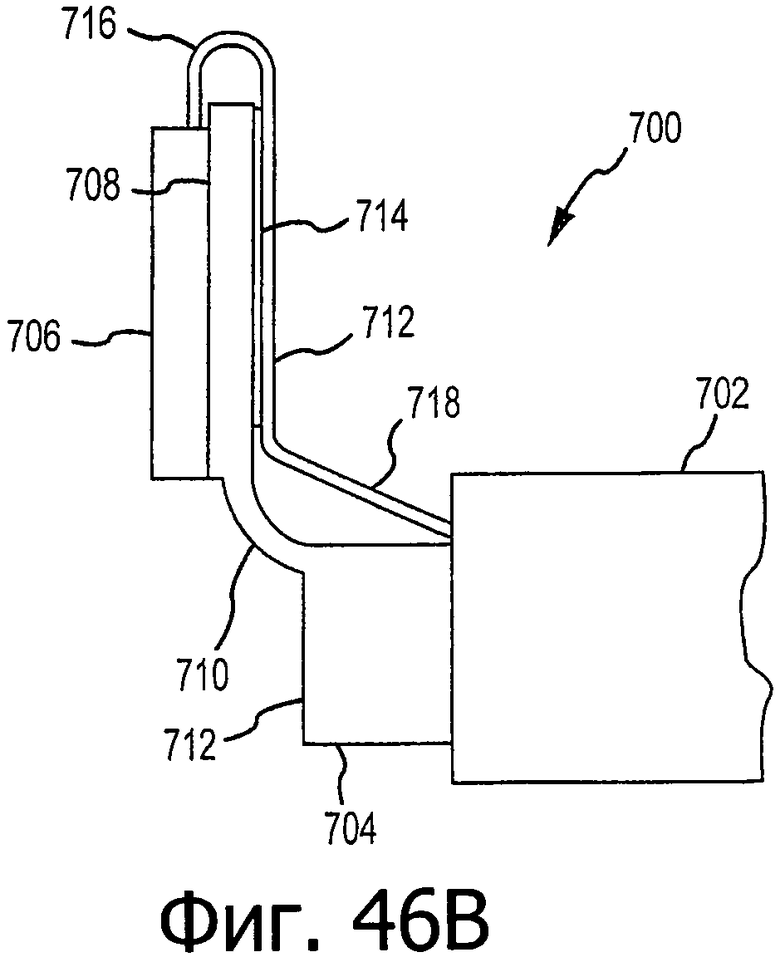
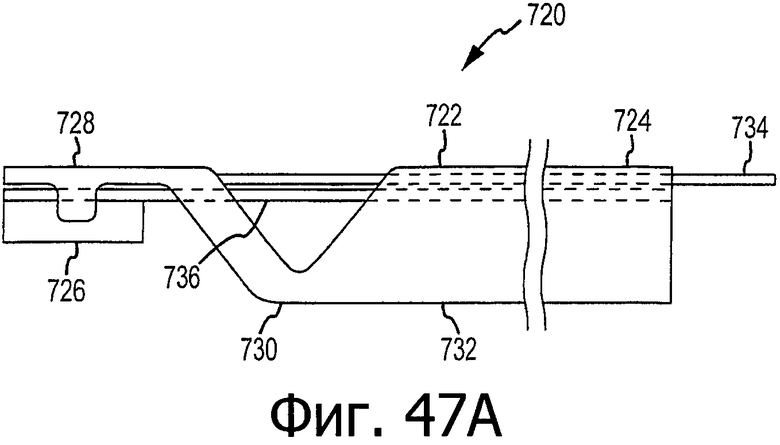
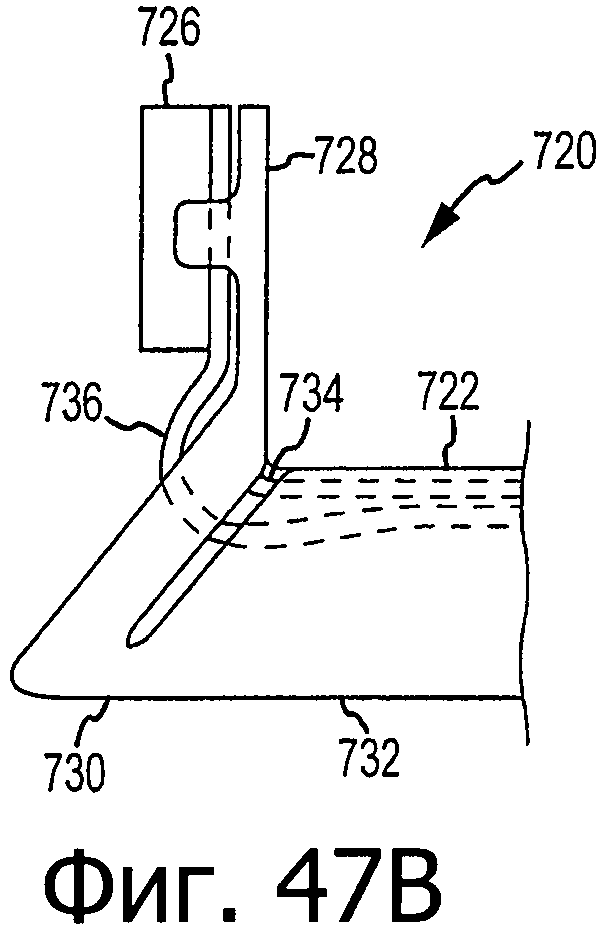

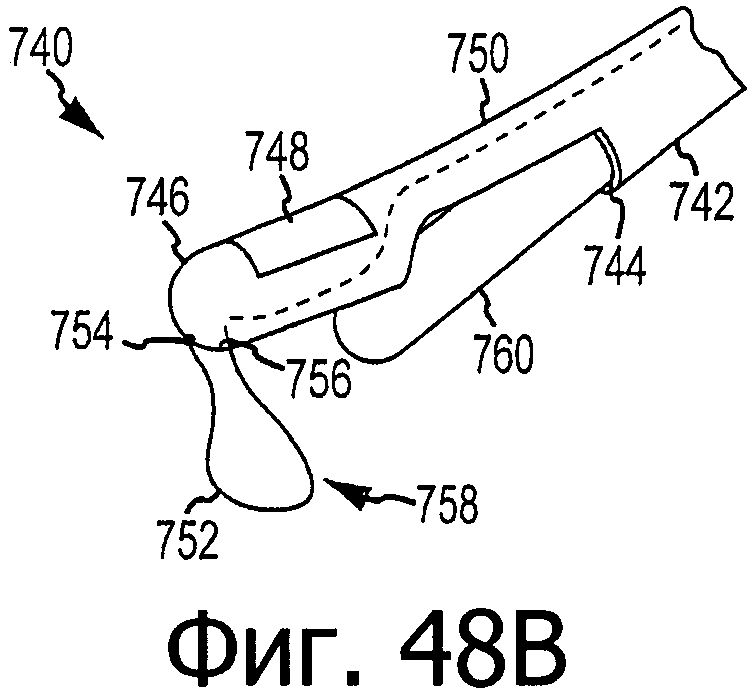
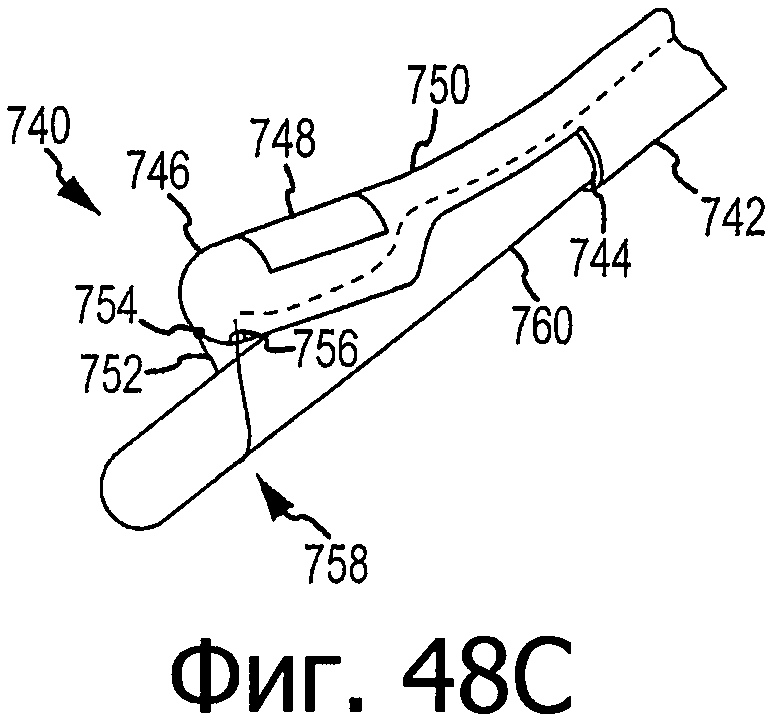
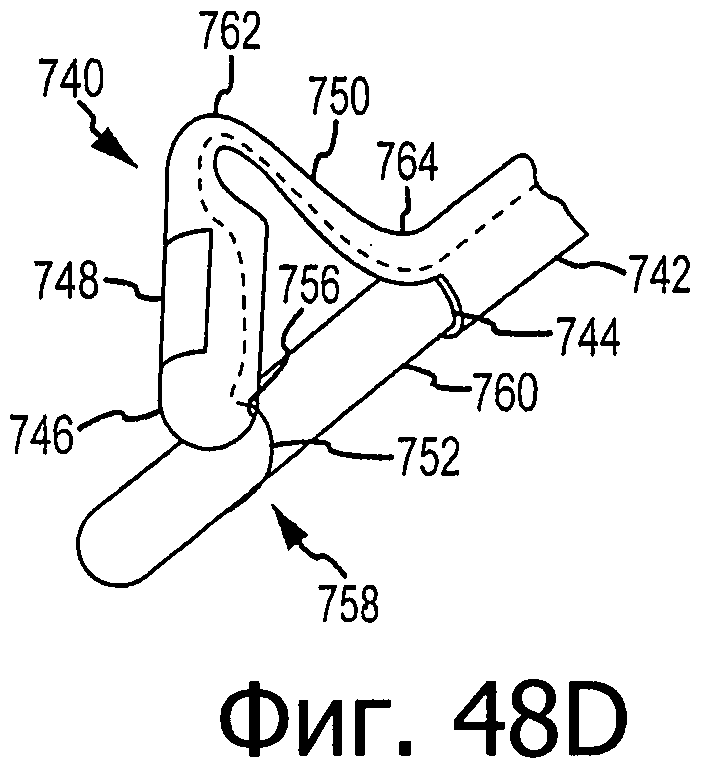
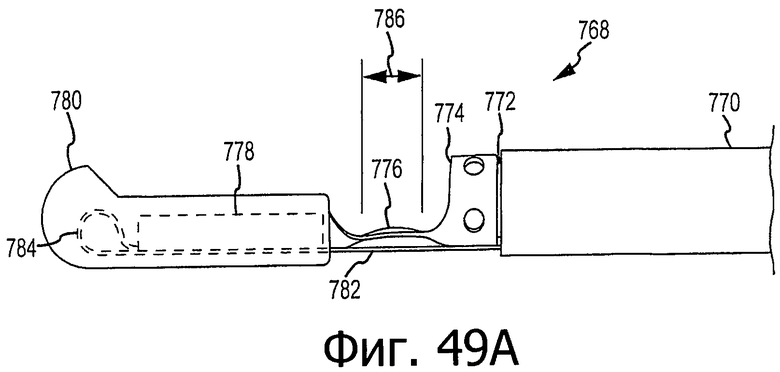
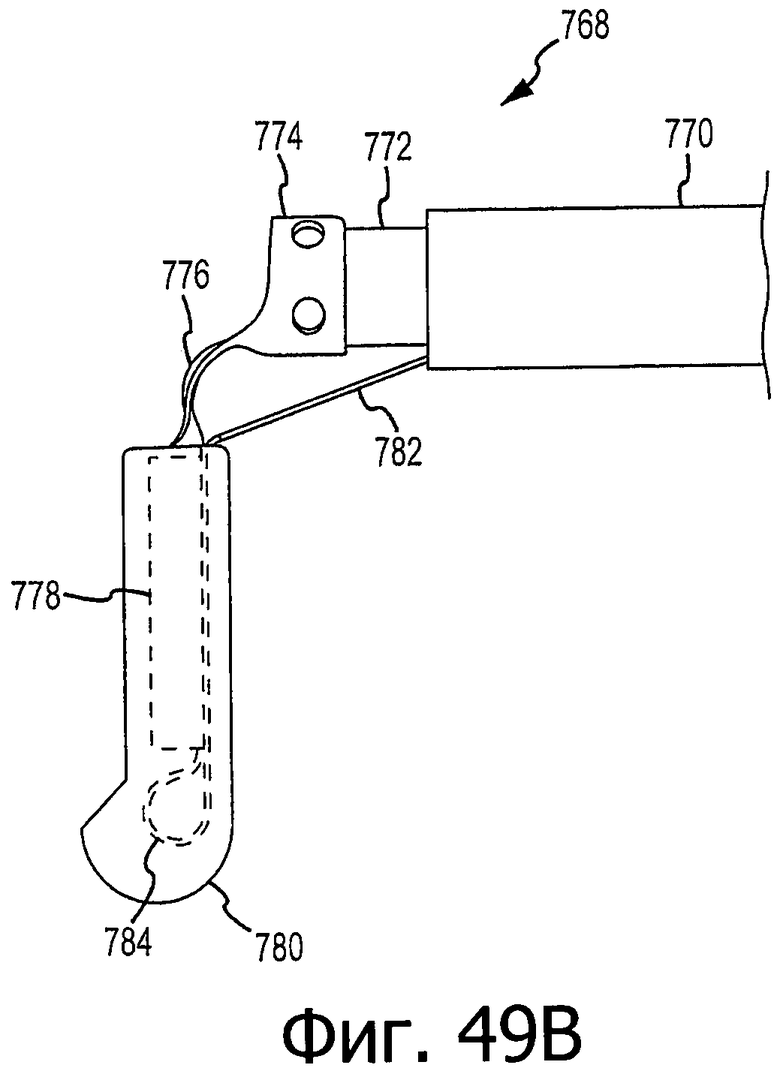
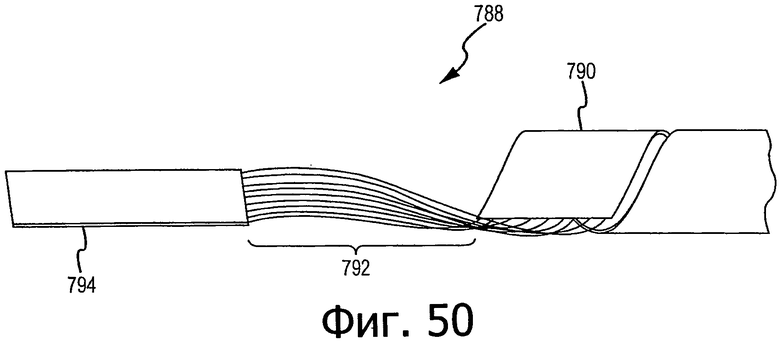
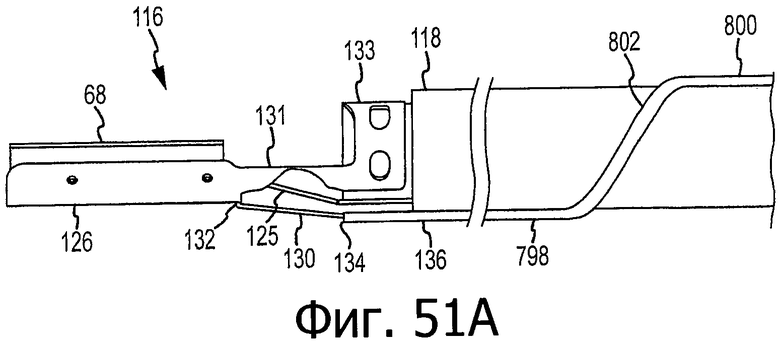
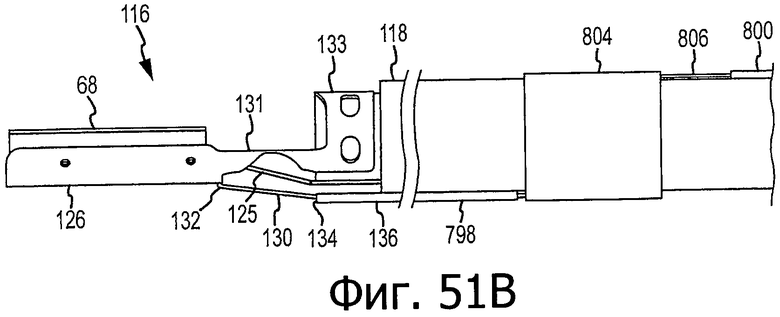
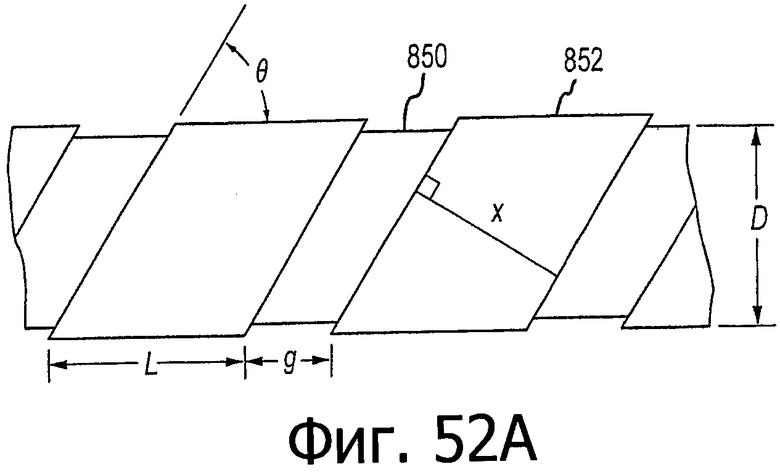
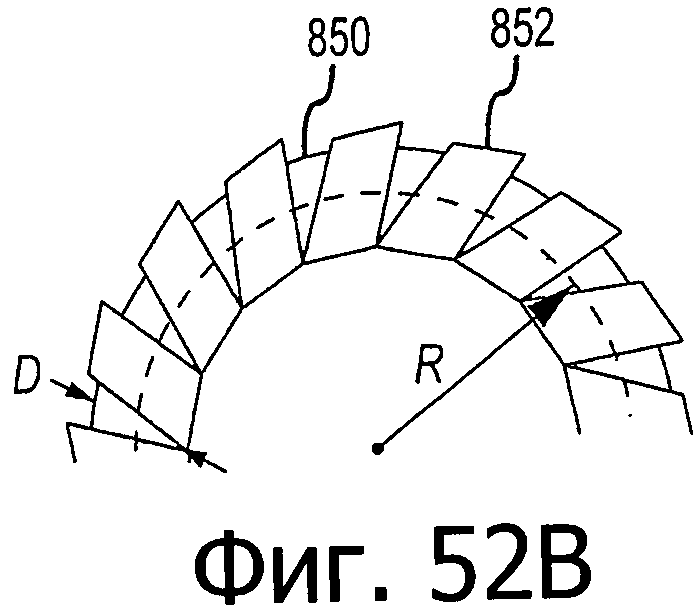

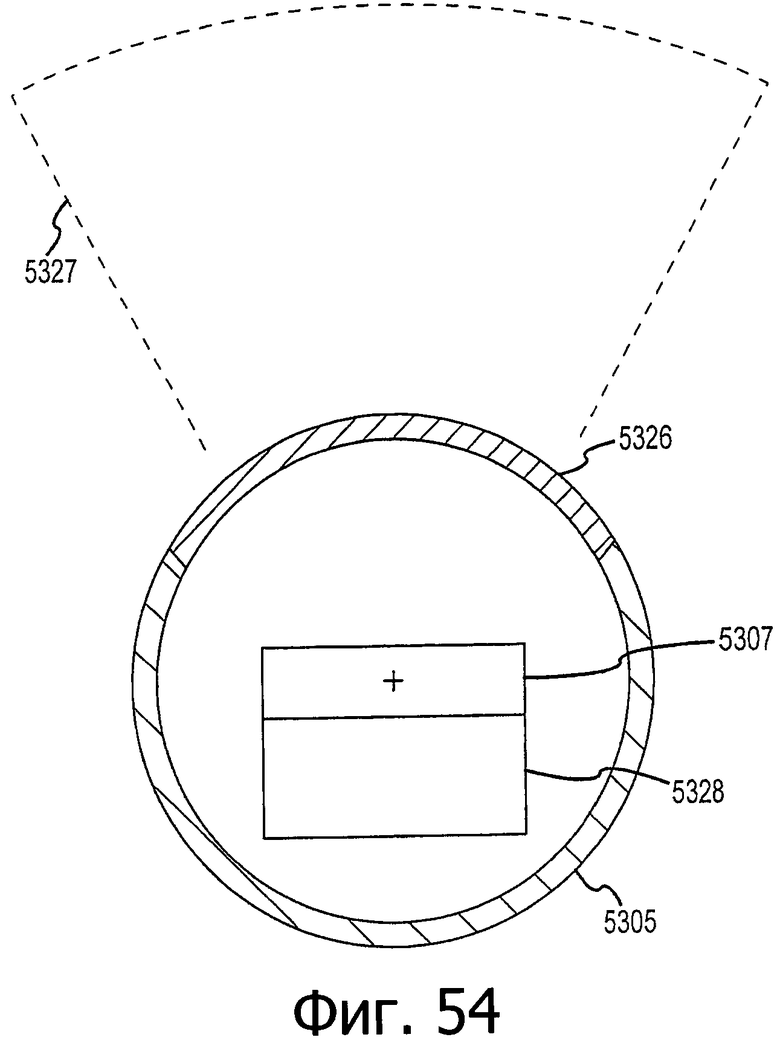
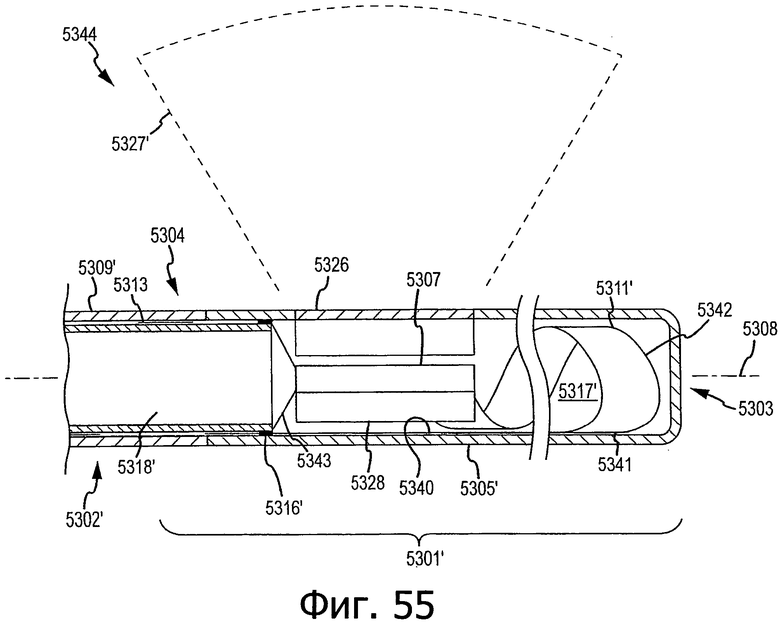
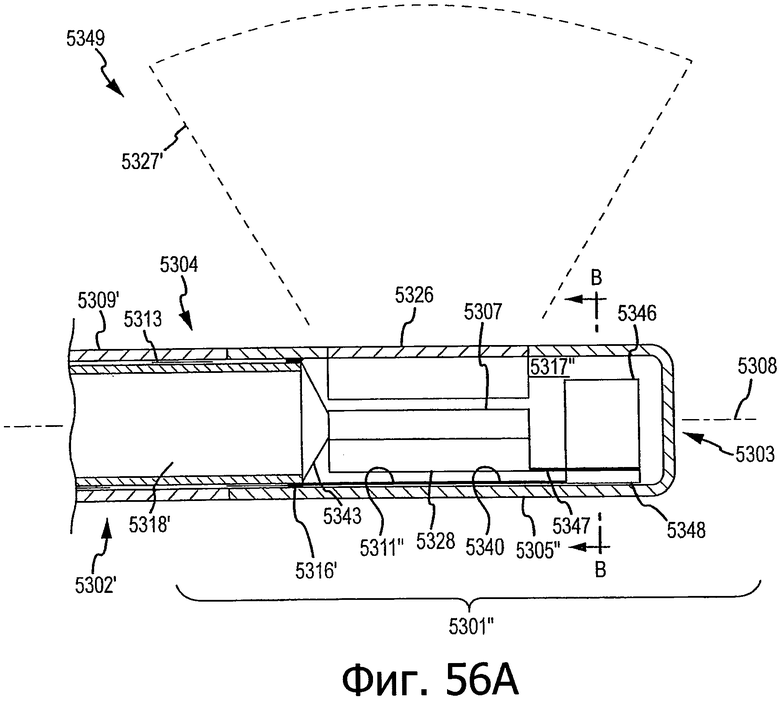
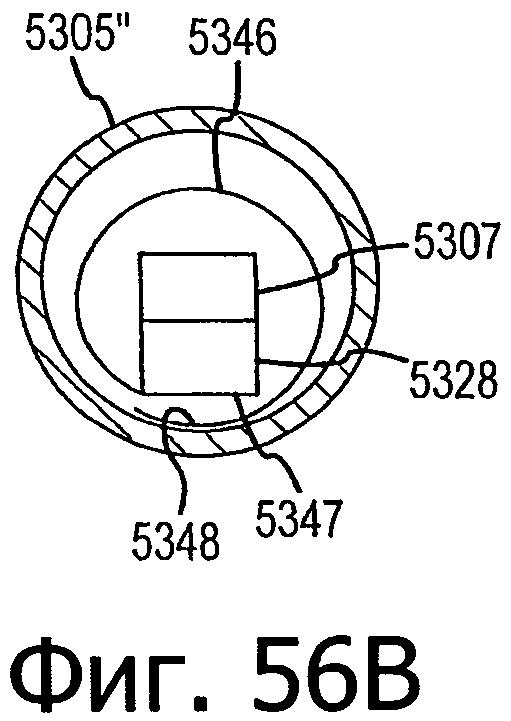
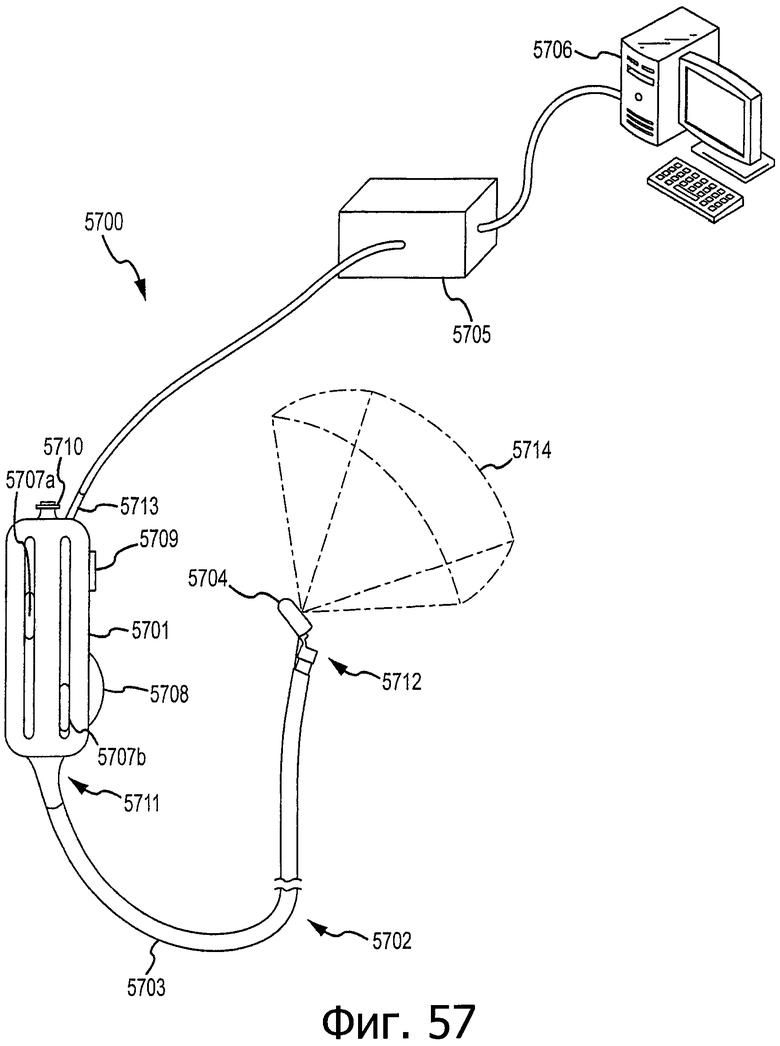
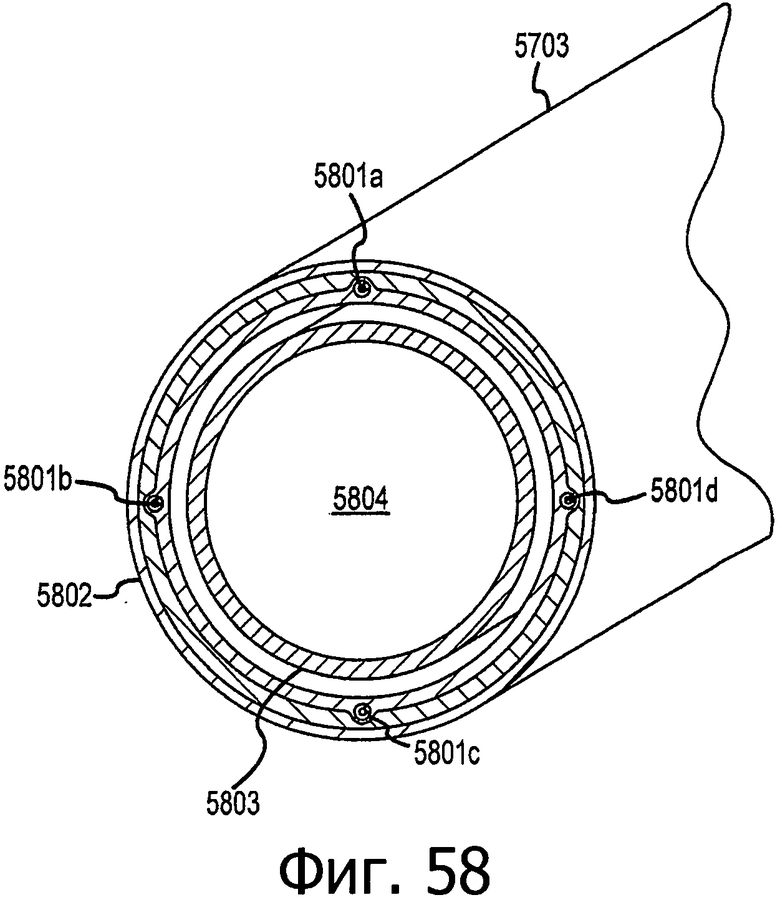
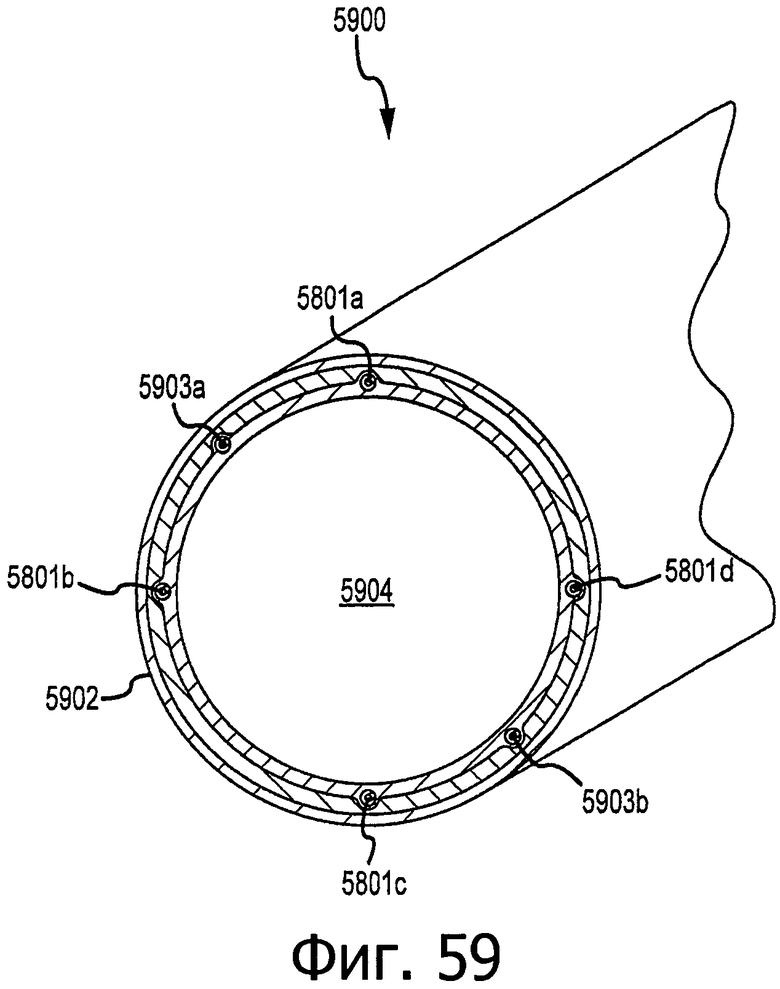
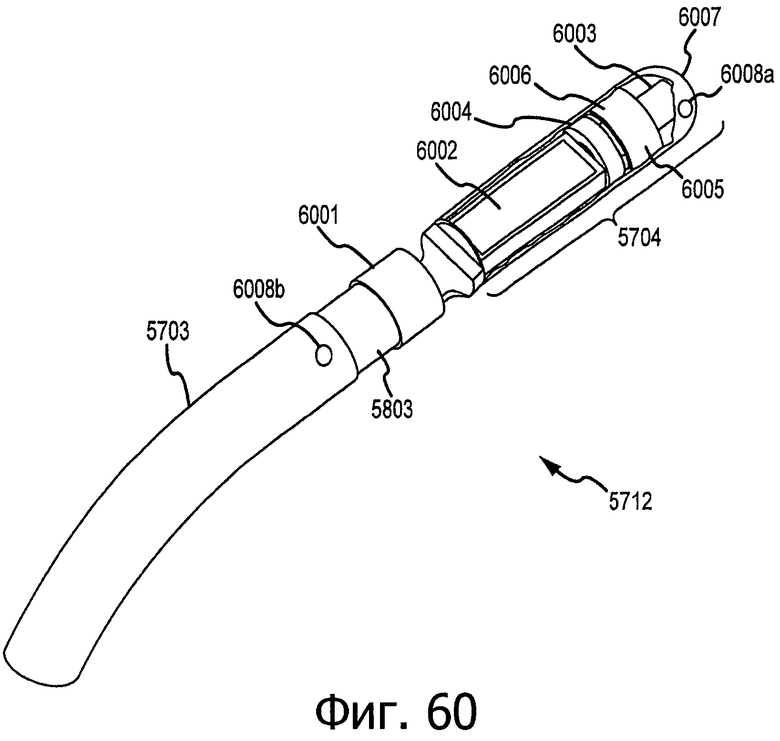
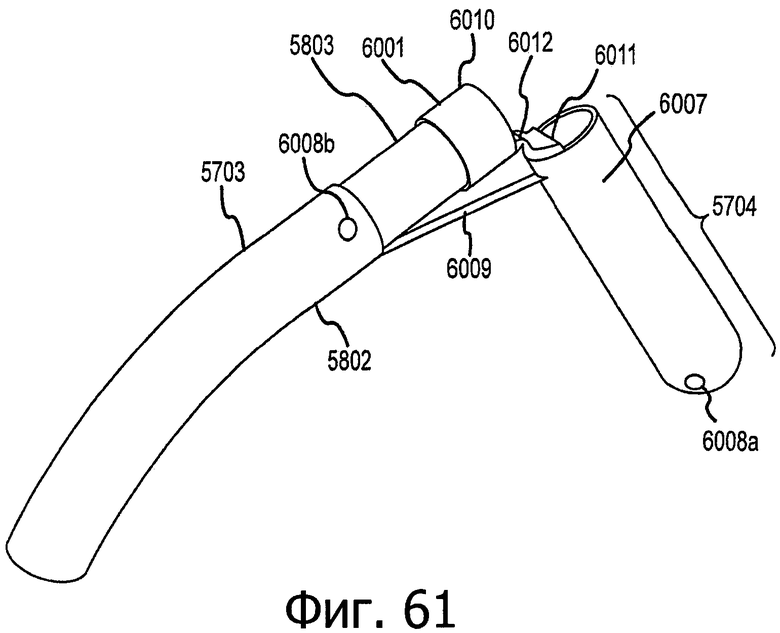
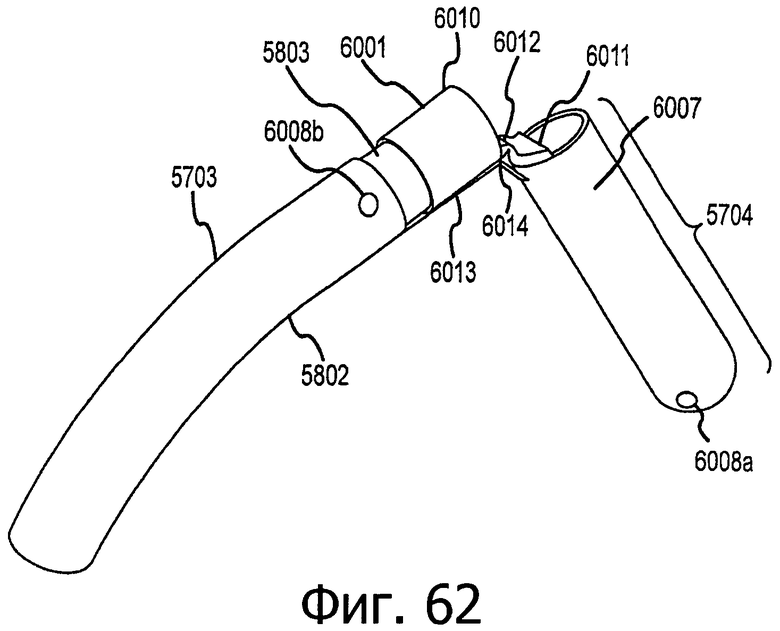
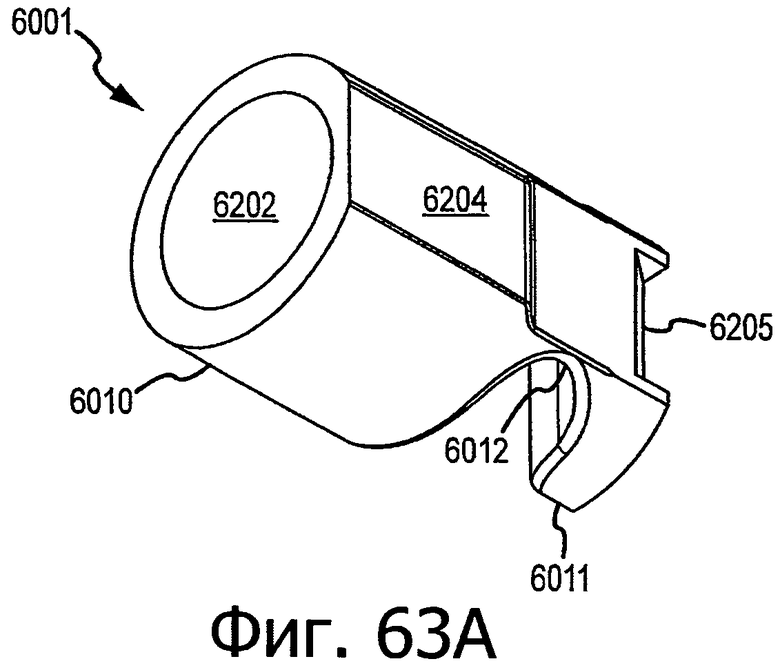
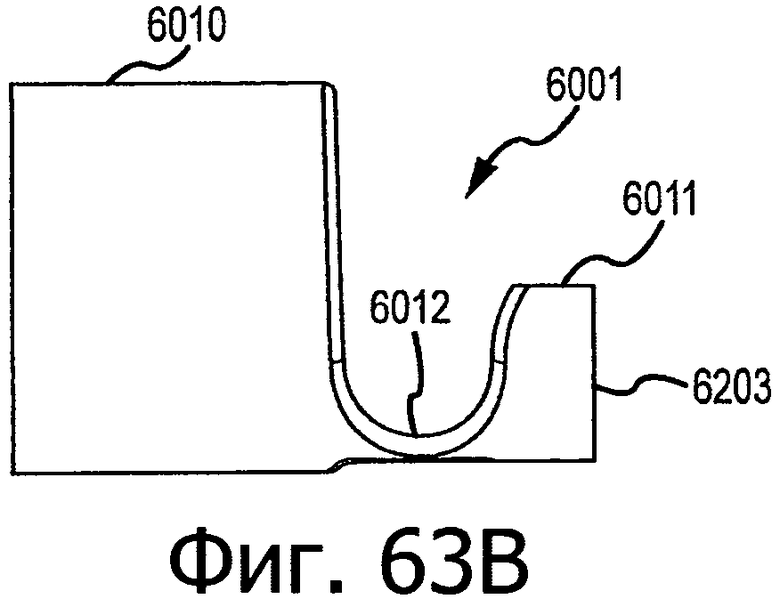
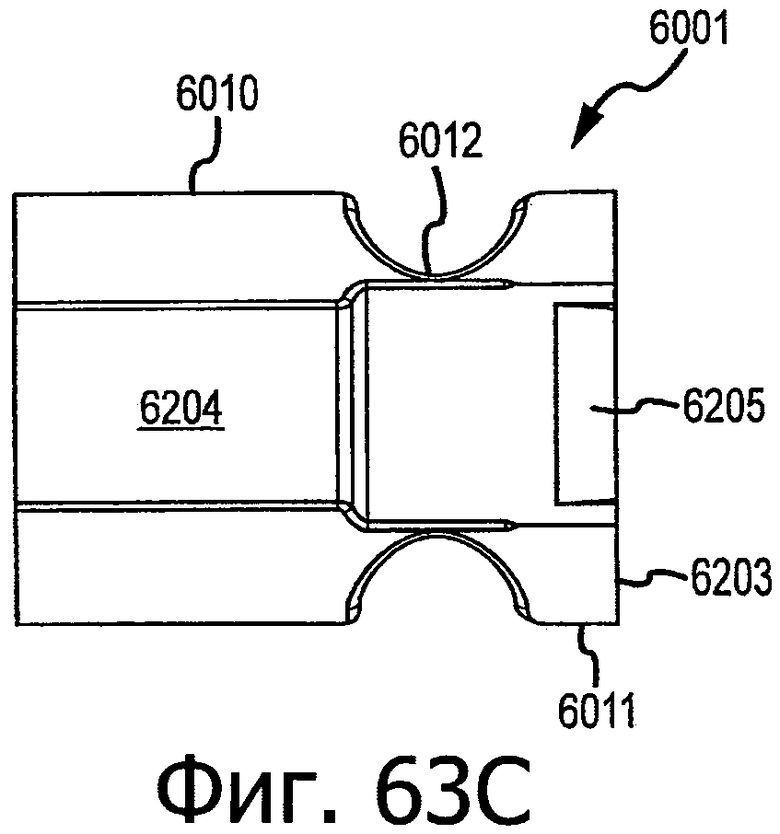
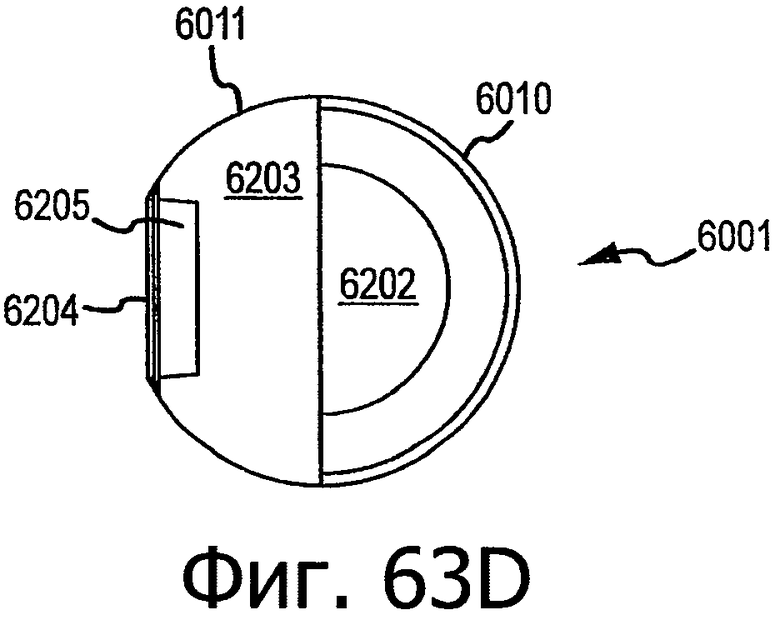
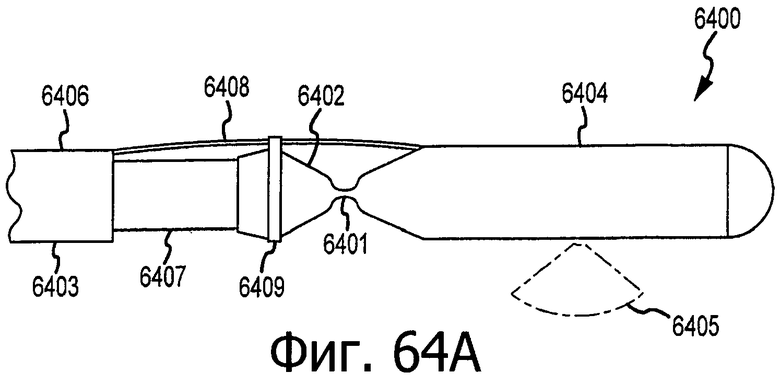
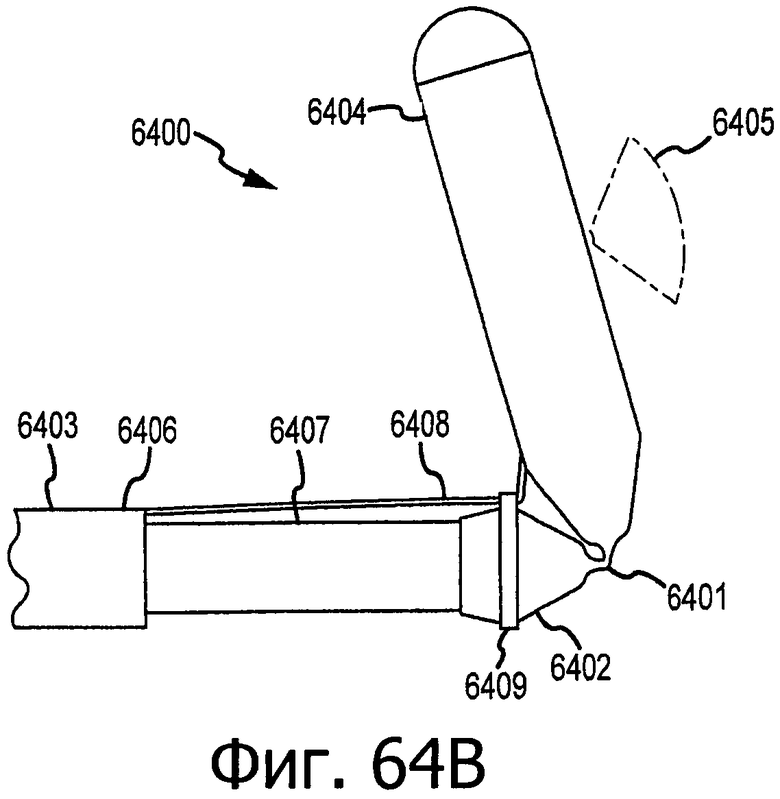
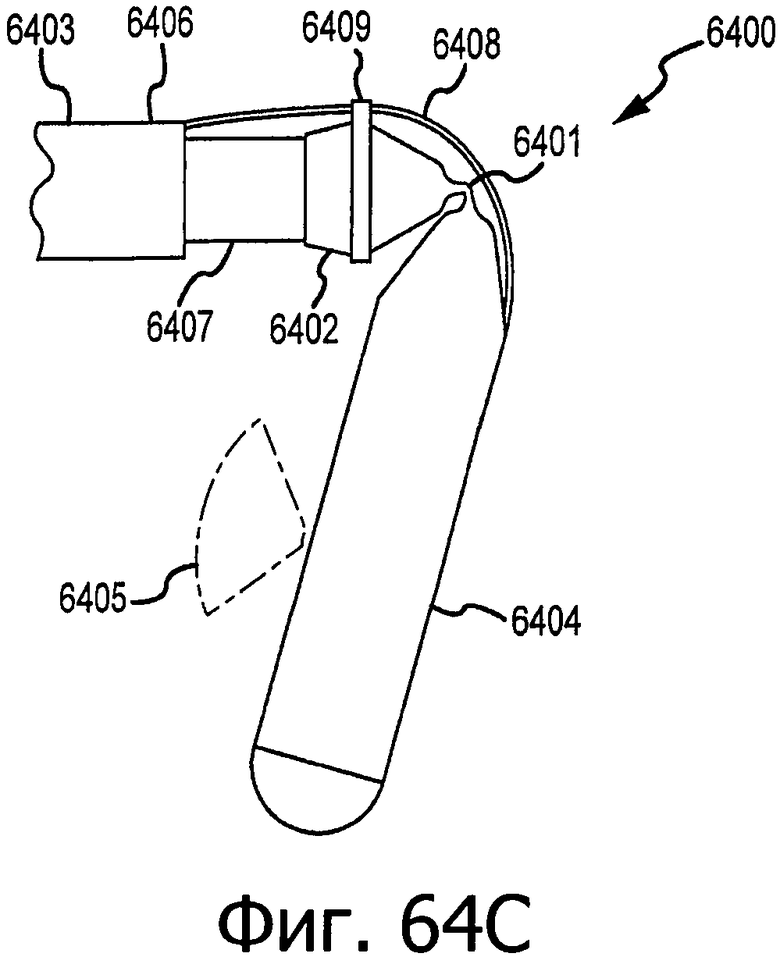
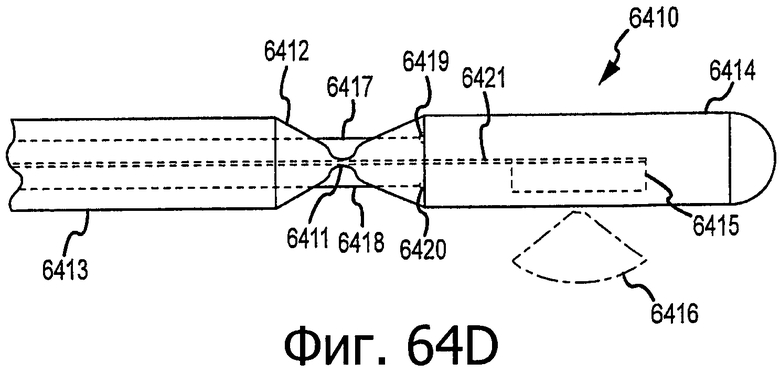
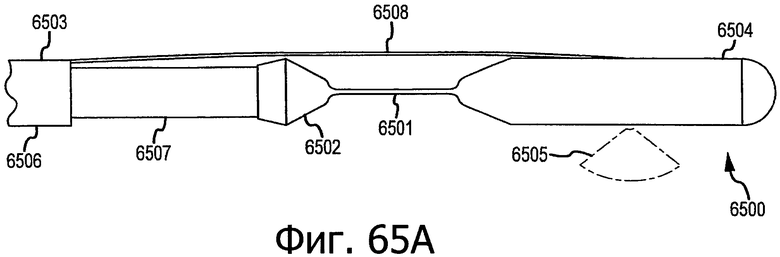
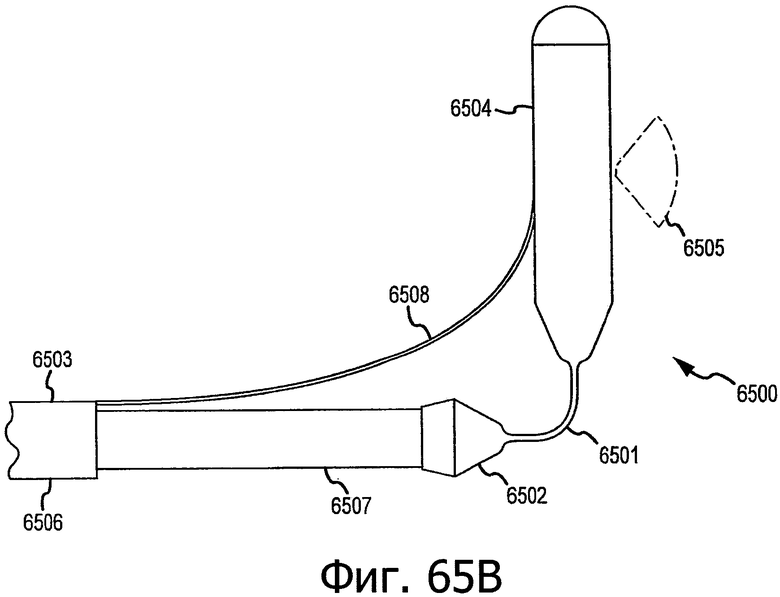
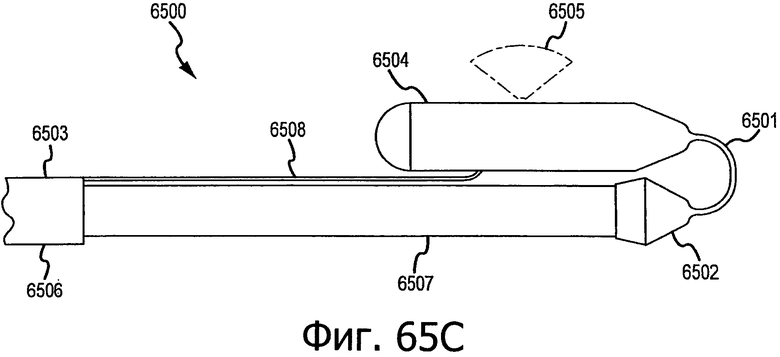
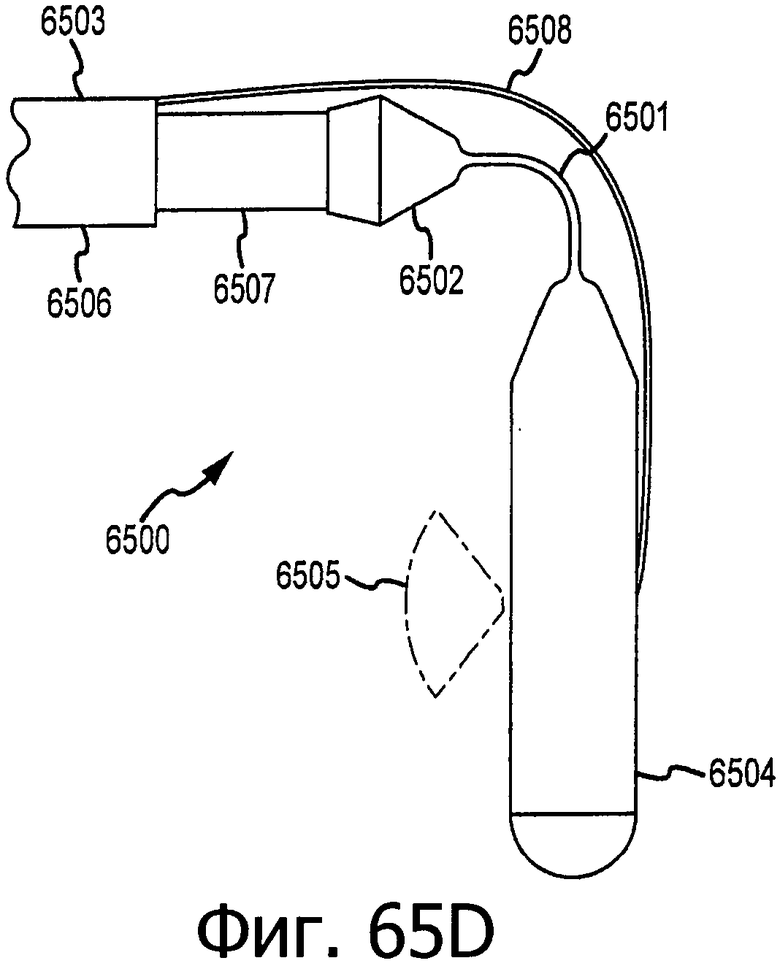
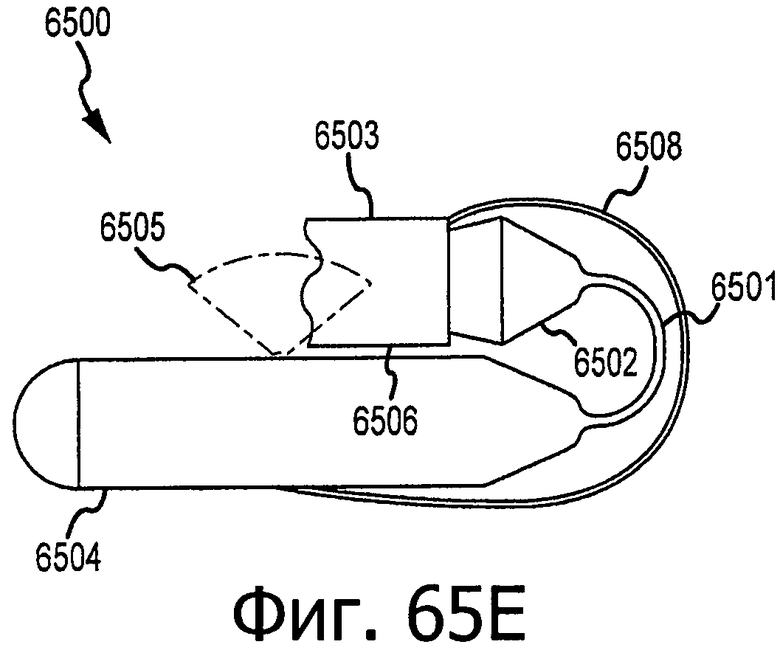
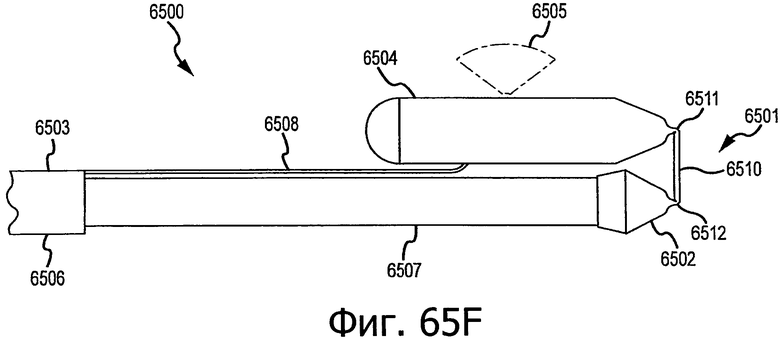
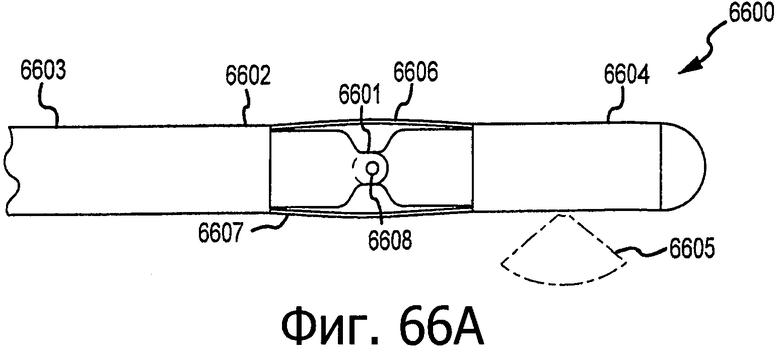
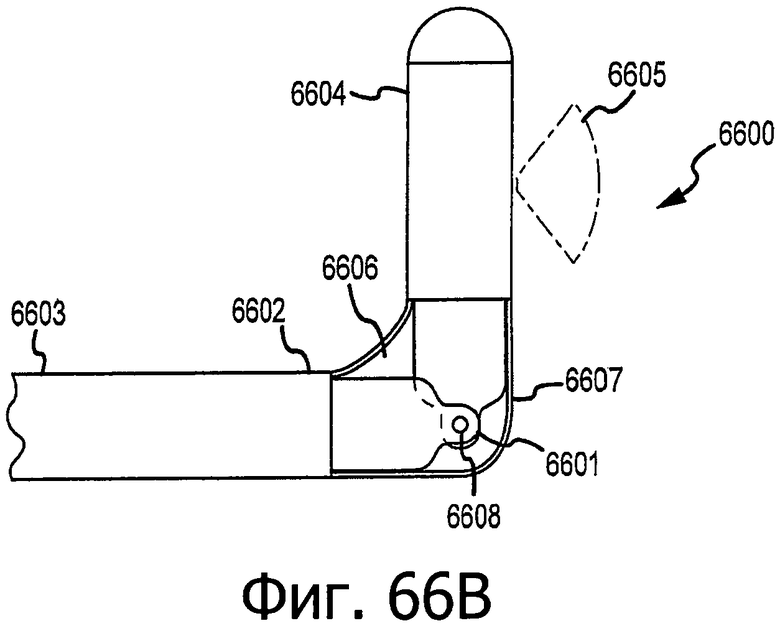
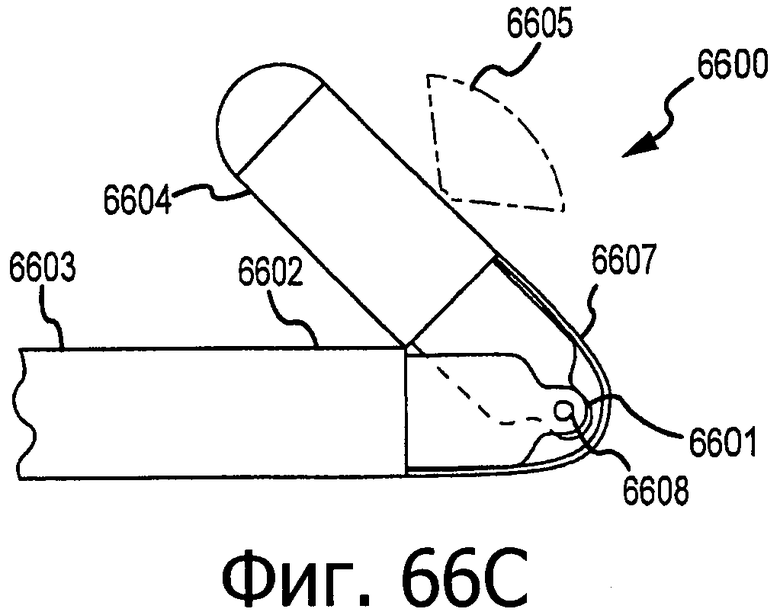
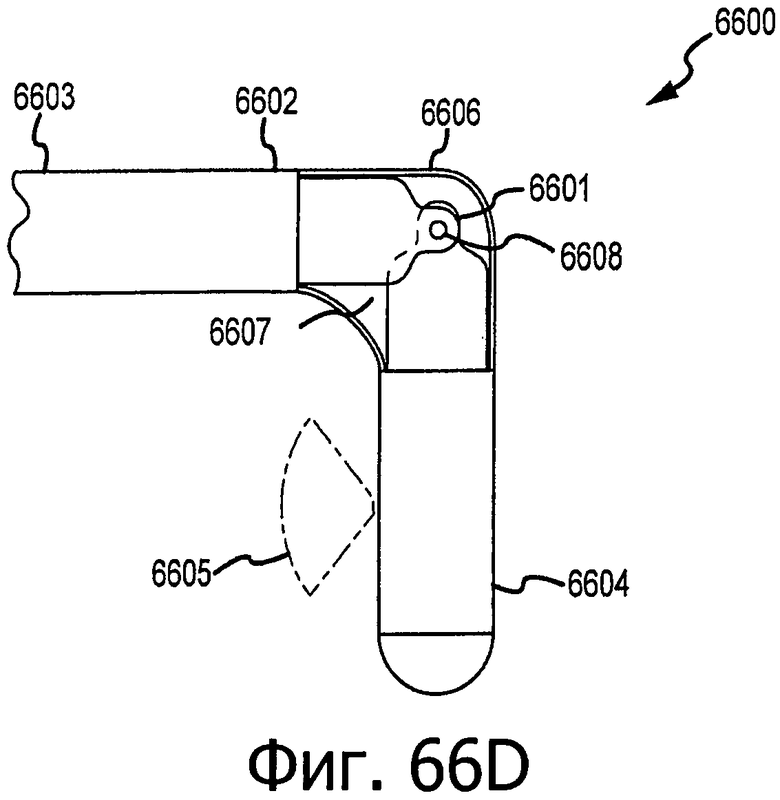
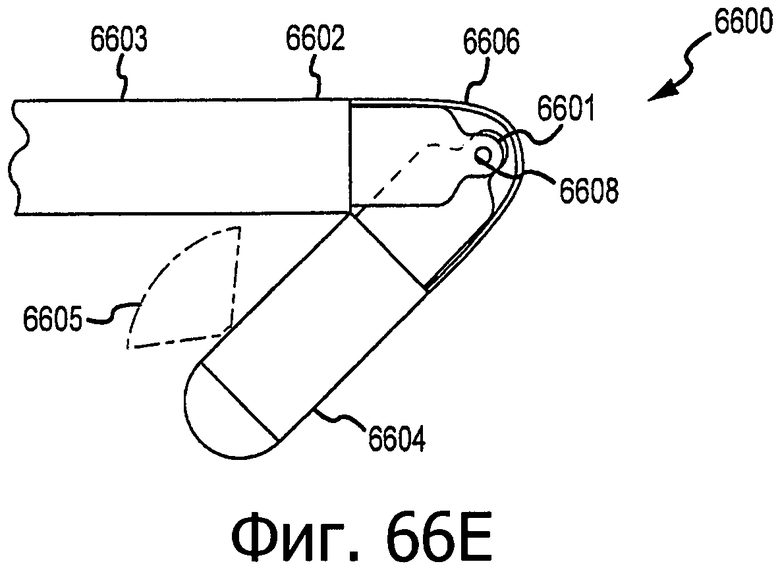
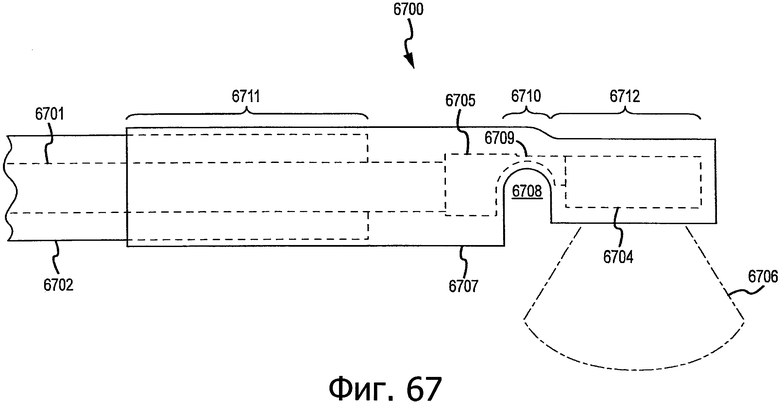
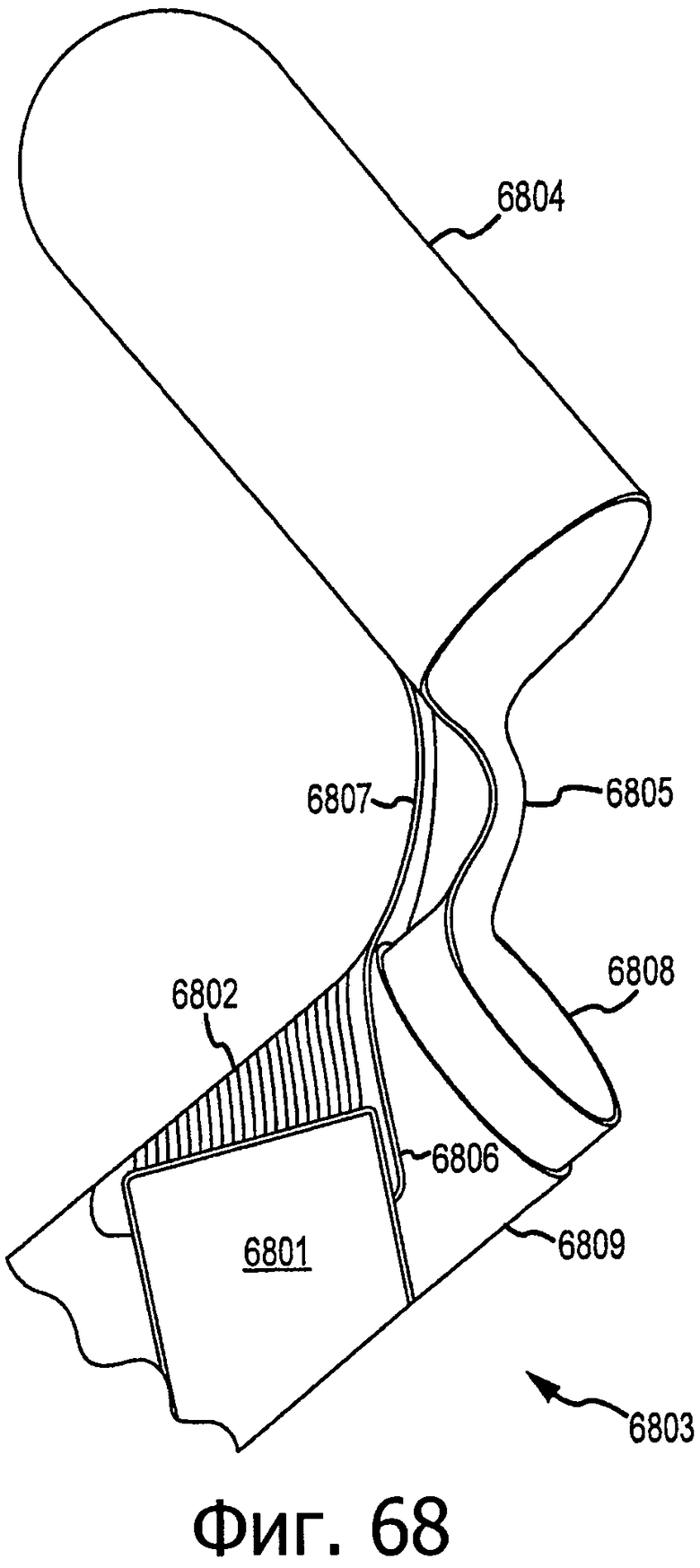
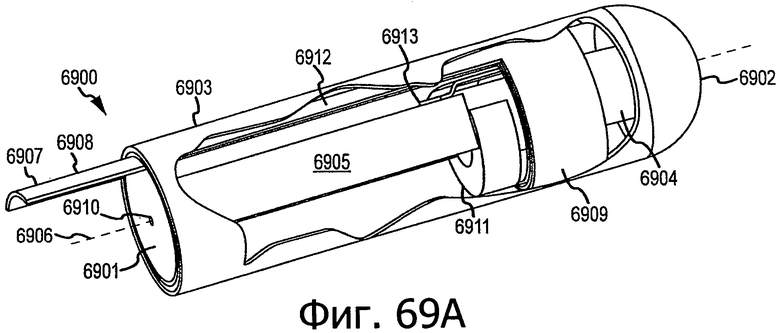
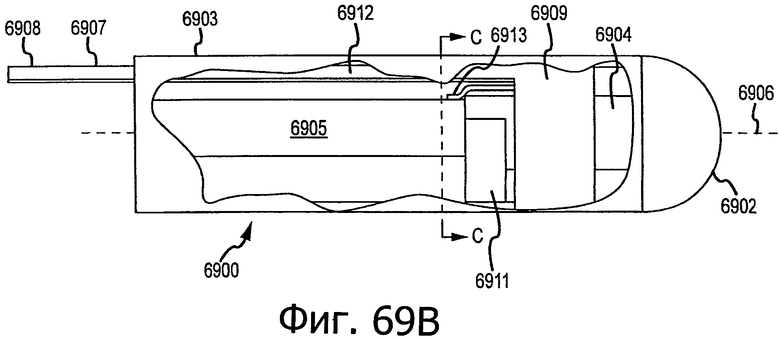
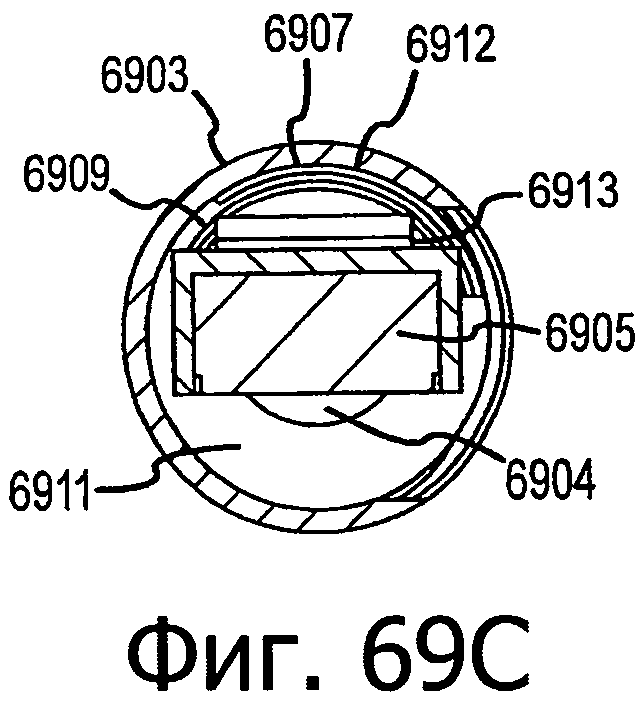

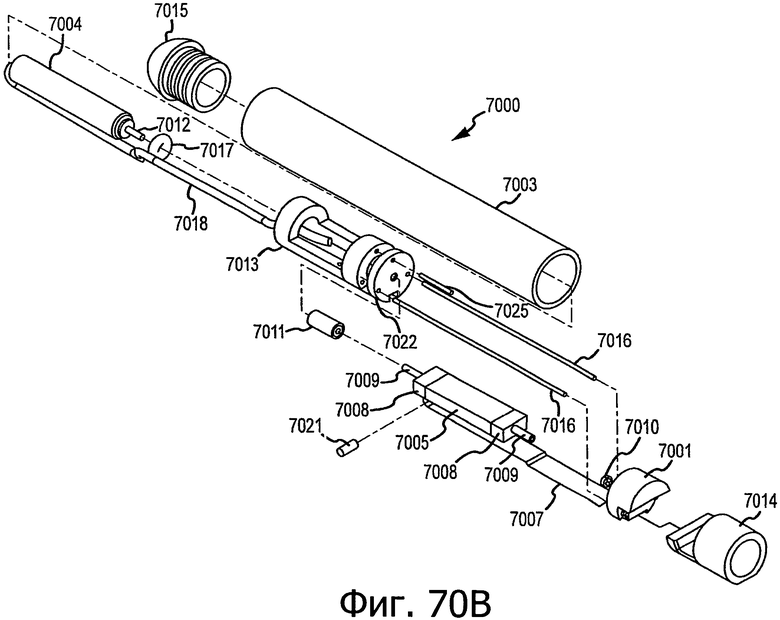
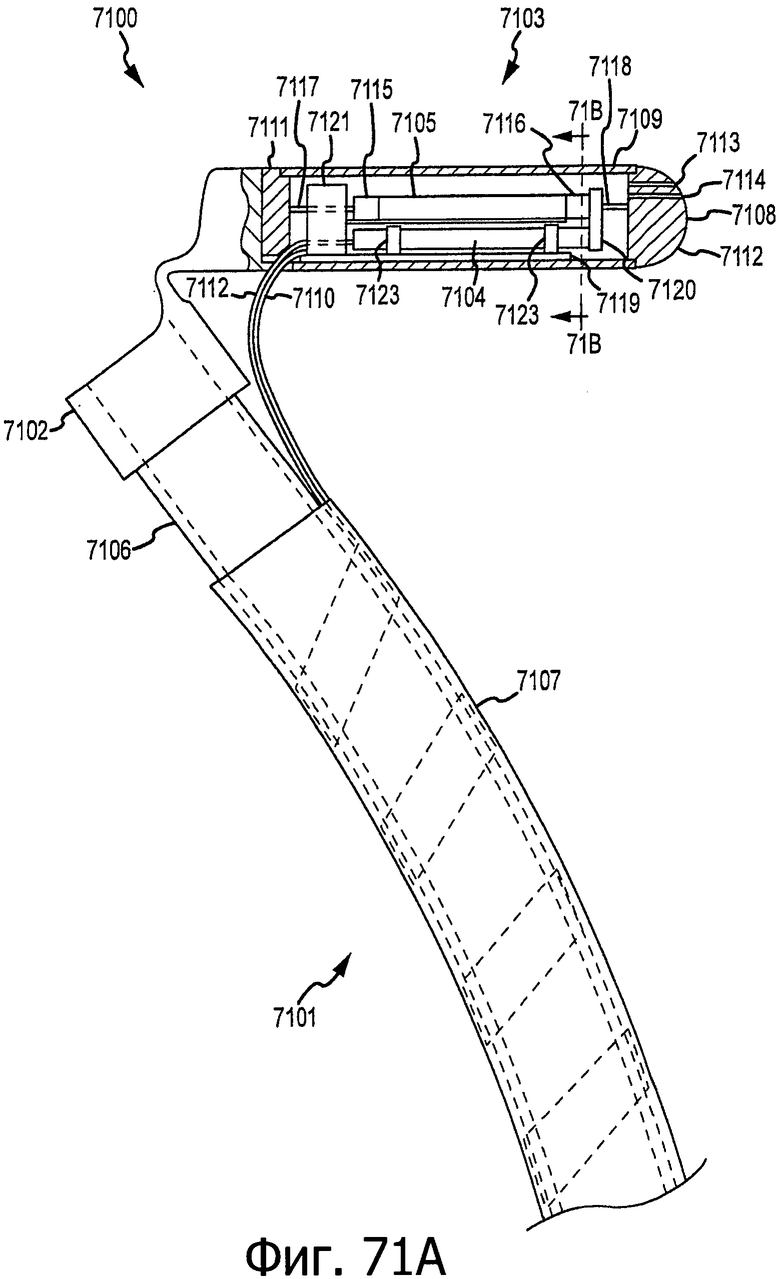
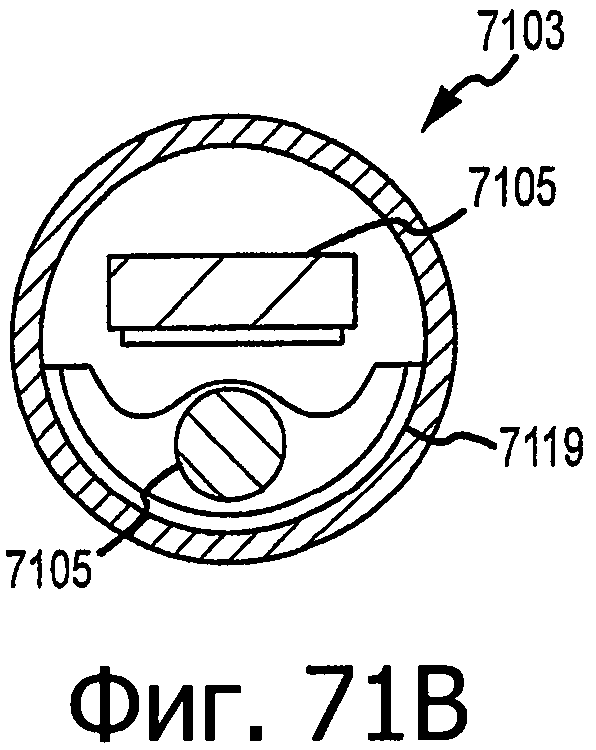
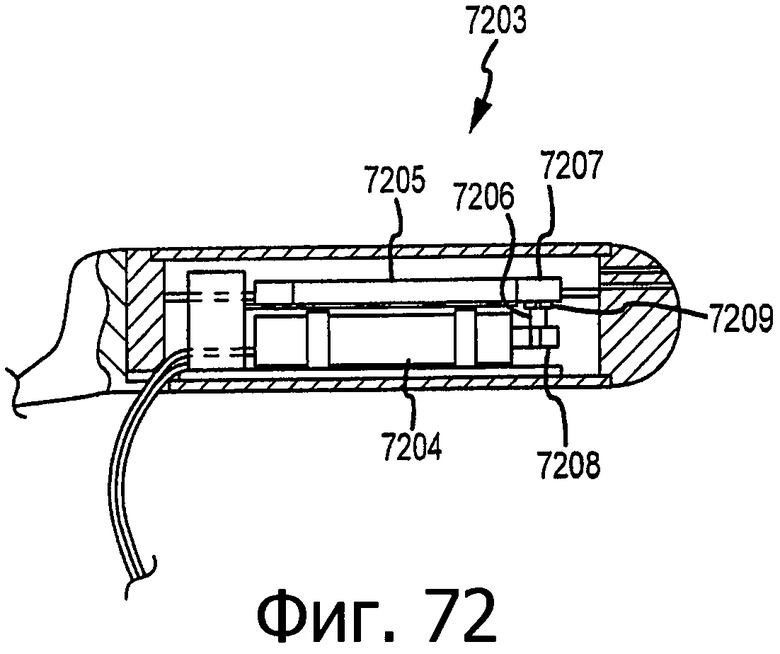

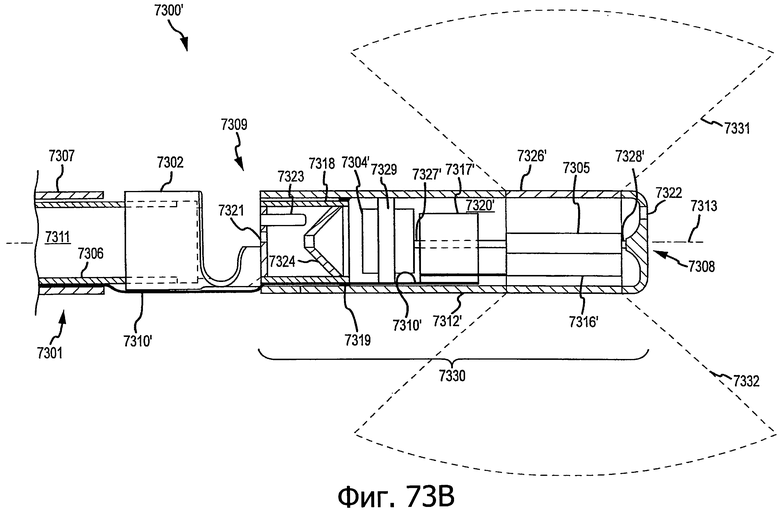
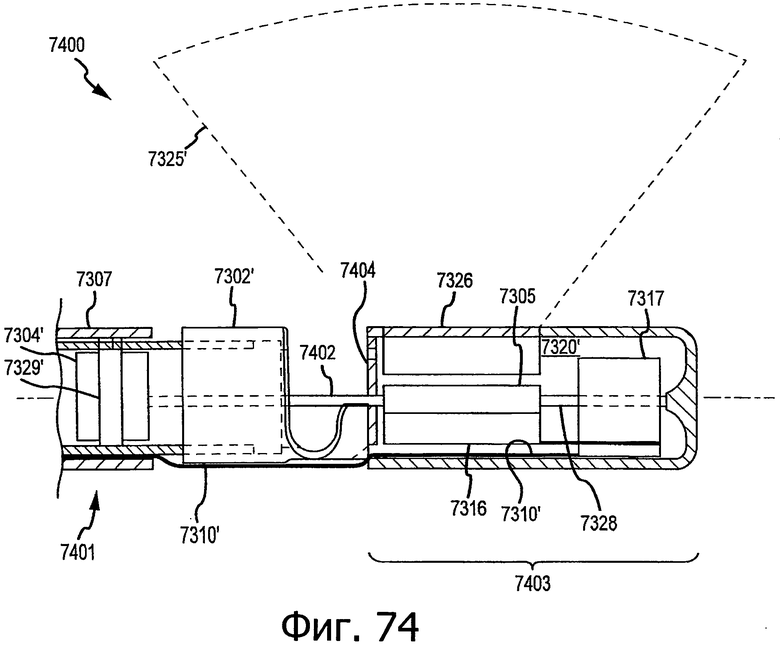
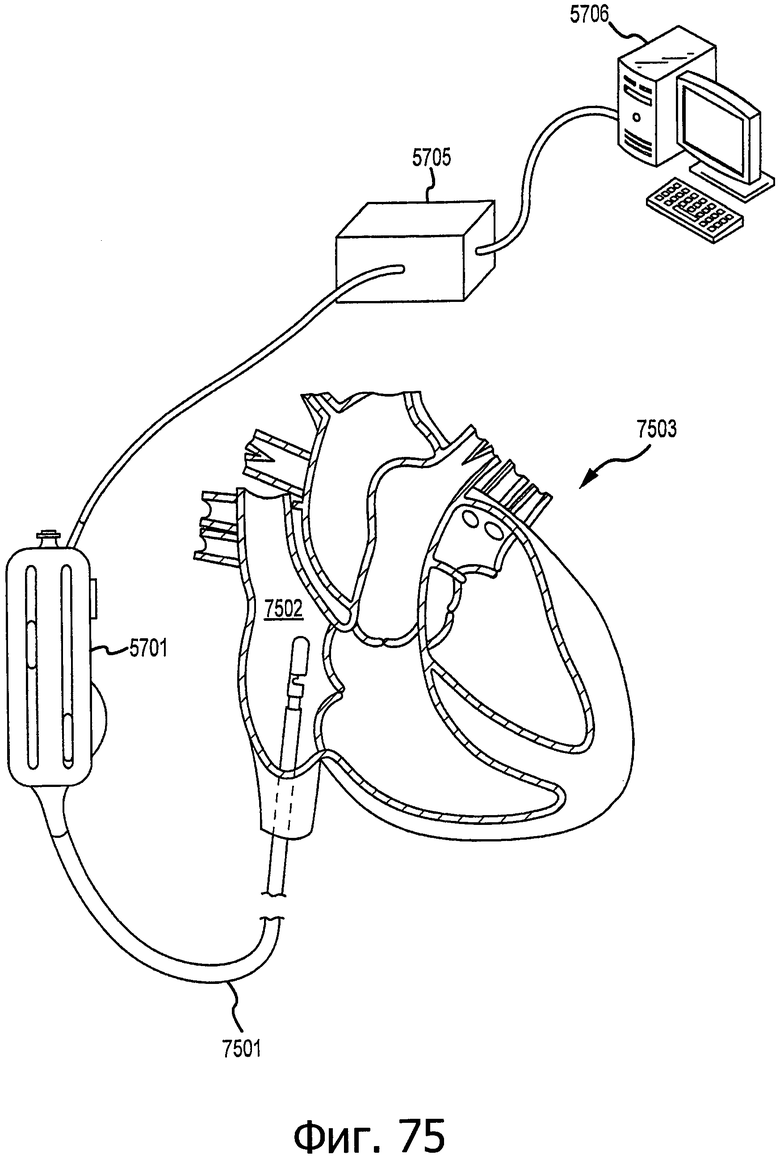

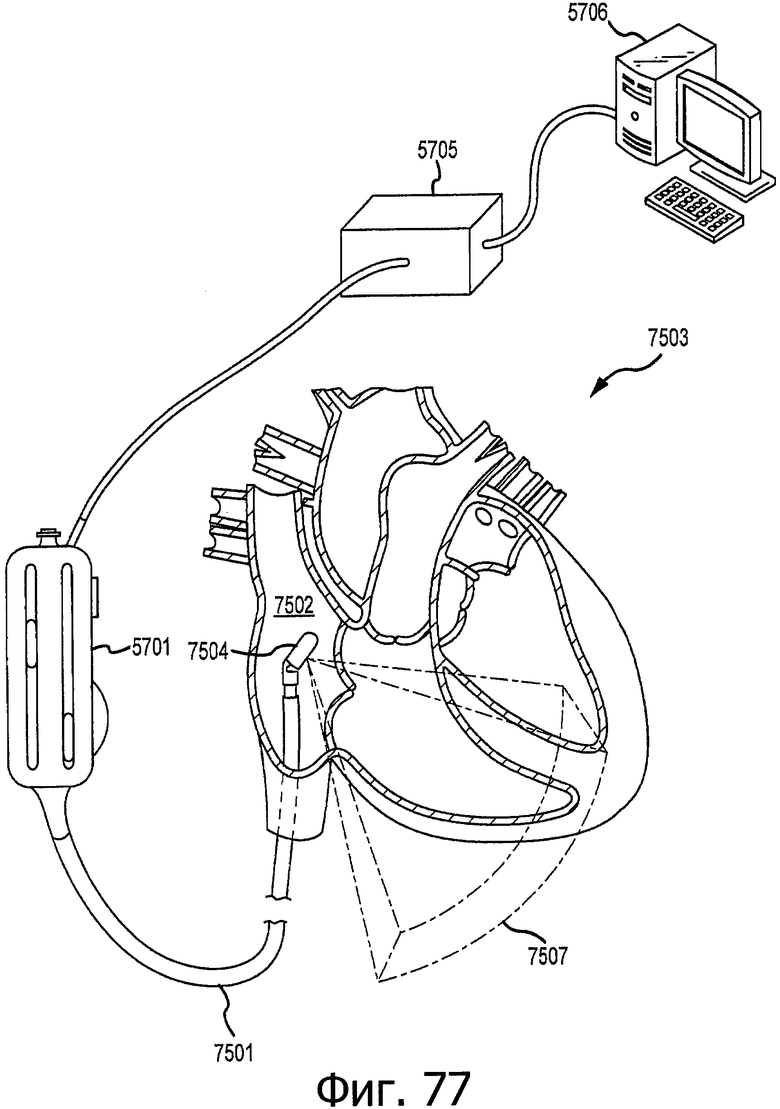
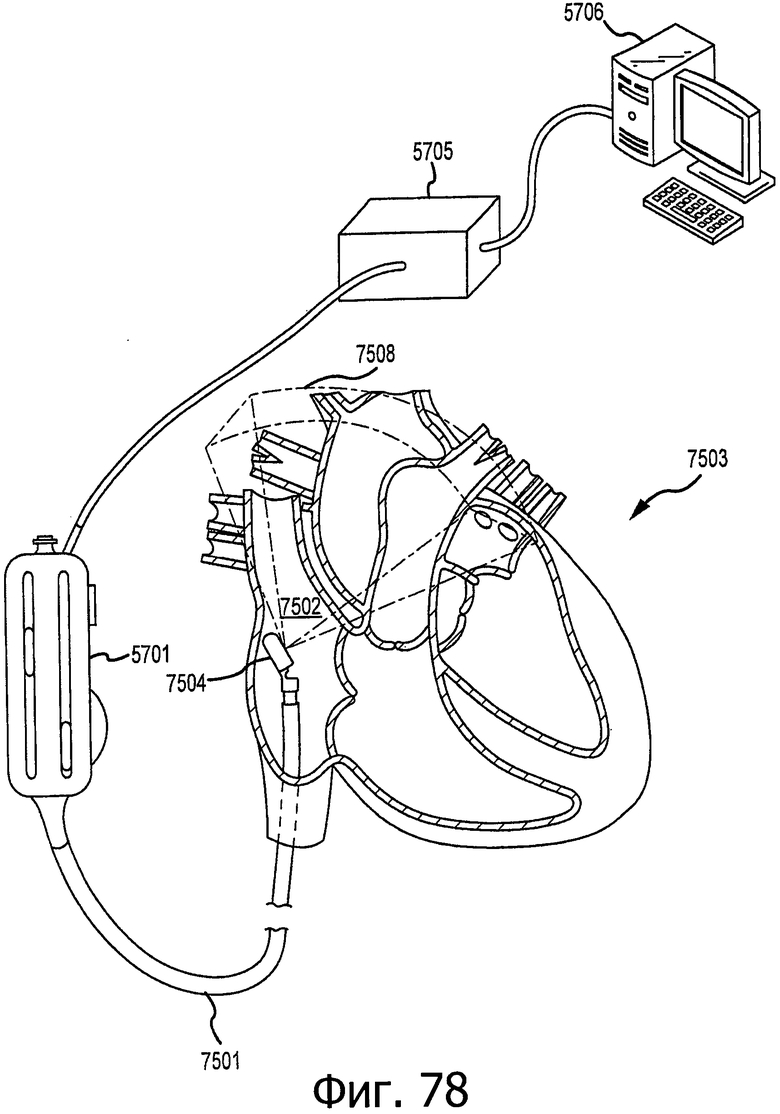
Изобретение относится к медицинской технике, а именно к катетерам. Катетер содержит корпус катетера, отклоняющийся элемент и устройство активации. Корпус катетера имеет внешний трубчатый корпус и один управляемый участок для управления катетером. Отклоняющийся элемент шарнирно соединен с дистальным концом корпуса катетера посредством шарнира и, во время работы, устанавливается в диапазоне углов относительно корпуса катетера. При этом отклоняющийся элемент включает в себя корпус, определяющий герметизированный замкнутый объем и вмещающий массив ультразвуковых преобразователей и двигатель. Двигатель обеспечивает возвратно-поступательное движение массива ультразвуковых преобразователей вокруг центральной оси отклоняющегося элемента или оси, параллельной указанной центральной оси, независимо от положения отклоняющегося элемента, причем двигатель расположен проксимально или дистально от массива ультразвуковых преобразователей внутри корпуса. Устройство активации, выполненное с возможностью активации отклонения отклоняющегося элемента, независимо от работы двигателя. При этом устройство активации и внешний трубчатый корпус выполнены с возможностью относительного движения. Использование изобретения позволяет обеспечить большую гибкость в управлении катетером при его продвижении в заданное положение и упрощение отклонения отклоняющегося элемента на требуемый угол, при поддержании относительного малого профиля катера. 44 з.п. ф-лы, 78 ил.
1. Катетер, содержащий:
корпус катетера, имеющий проксимальный конец и дистальный конец, при этом корпус катетера содержит внешний трубчатый корпус и по меньшей мере один управляемый участок для управления катетером;
отклоняющийся элемент, шарнирно соединенный с дистальным концом корпуса катетера посредством шарнира и во время работы устанавливающийся в диапазоне углов относительно корпуса катетера, при этом отклоняющийся элемент включает в себя корпус, определяющий герметизированный замкнутый объем и вмещающий массив ультразвуковых преобразователей и двигатель, причем двигатель выполнен с возможностью обеспечения возвратно-поступательного движения массива ультразвуковых преобразователей вокруг центральной оси отклоняющегося элемента или оси, параллельной указанной центральной оси, независимо от положения отклоняющегося элемента, причем двигатель расположен проксимально или дистально от массива ультразвуковых преобразователей внутри корпуса; и
устройство активации, продолжающееся от проксимального конца до дистального конца корпуса катетера и выполненное с возможностью активации отклонения отклоняющегося элемента, независимо от работы двигателя, при этом устройство активации и внешний трубчатый корпус выполнены с возможностью относительного движения.
2. Катетер по п.1, в котором минимальная ширина представления катетера составляет меньше чем 3 см.
3. Катетер по п.1, в котором длина области, в которой возникает отклонение, когда отклоняющийся элемент отклоняется на 90° относительно корпуса катетера, меньше, чем максимальный поперечный размер корпуса катетера.
4. Катетер по п.1, в котором один управляемый участок расположен на дистальном конце корпуса катетера.
5. Катетер по п.1, в котором отклоняющийся элемент во время работы отклоняется в диапазоне углов относительно продольной оси корпуса катетера, при этом данный диапазон составляет от -90° до +180°.
6. Катетер по п.1, в котором отклоняющийся элемент во время работы отклоняется по дуге, по меньшей мере, на 270° относительно продольной оси корпуса катетера.
7. Катетер по п.1, в котором корпус катетера содержит канал, продолжающийся от дистального конца корпуса катетера до точки, проксимальной к нему.
8. Катетер по п.7, в котором канал предназначен для перемещения, по меньшей мере, одного из устройства и материала.
9. Катетер по п.1, в который дополнительно содержит пользовательскую ручку, расположенную на проксимальном конце катетера для управления отклонением отклоняющегося элемента.
10. Катетер по п.1, дополнительно содержащий расширяемый канал, соединенный с корпусом катетера для перемещения, по меньшей мере, одного из устройства и материала.
11. Катетер по п.1, в котором корпус катетера содержит расположенный внутри оболочки участок для перемещения, по меньшей мере, одного из устройства и материала.
12. Катетер по п.1, в котором при отклонении шарнира определяется дуга смещения, и отношение максимального поперечного размера дистального конца корпуса катетера к радиусу дуги смещения составляет, по меньшей мере, 1.
13. Катетер по п.1, в котором шарнир представляет собой пленочный шарнир.
14. Катетер по п.1, в котором шарнир определяет фиксированную ось вращения.
15. Катетер по п.1, в котором шарнир содержит первую цилиндрическую поверхность и вторую цилиндрическую поверхность, расположенные вокруг общей центральной оси, при этом при отклонении отклоняющегося элемента первая поверхность имеет возможность перемещения относительно второй поверхности.
16. Катетер по п.1, в котором шарнир содержит нетрубчатый изгибаемый участок.
17. Катетер по п.1, в котором при отклонении шарнира определяется дуга смещения, и отношение максимального поперечного размера дистального конца корпуса катетера к радиусу дуги смещения составляет, по меньшей мере, приблизительно 1.
18. Катетер по п.1, дополнительно содержащий электрическое соединение, соединяющее массив ультразвуковых преобразователей и дистальный конец корпуса катетера.
19. Катетер по п.1, в котором связующее вещество высокой вязкости, не растворимое в воде, расположено в зазоре между структурой, закрепленной на массиве ультразвуковых преобразователей, и внутренней стенкой корпуса.
20. Катетер по п.1, в котором отклоняющийся элемент выполнен с возможностью отклонения в диапазоне углов обзора от положения, направленного вперед, до положения, направленного назад, в ответ на действие силы отклонения, приложенной к шарниру, при выполнении относительного движения между устройством активации и внешним трубчатым корпусом.
21. Катетер по п.1, в котором устройство активации представляет собой внутренний трубчатый корпус, расположенный внутри внешнего трубчатого корпуса.
22. Катетер по п.1, в котором устройство активации представляет собой вытяжной провод, расположенный вдоль внешнего трубчатого корпуса.
23. Катетер по п.1, дополнительно содержащий ручку, расположенную на проксимальном конце, при этом ручка содержит:
корпус ручки; и
подвижный элемент, подвижный относительно корпуса,
при этом устройство активации соединено с подвижным элементом, причем выбранное движение подвижного элемента относительно корпуса ручки приводит к отклонению отклоняющегося элемента.
24. Катетер по п.9, в котором ручка дополнительно содержит элемент управления, предназначенный для управления, по меньшей мере, одним управляемым участком, при этом элемент управления работает независимо от устройства активации.
25. Катетер по п.1, дополнительно содержащий:
по меньшей мере, первый элемент электрического соединения, имеющий первый участок, намотанный в виде витков внутри корпуса отклоняющегося элемента и электрически соединенный с массивом ультразвуковых преобразователей.
26. Катетер по п.25, в котором первый участок первого элемента электрического соединения расположен в виде компоновки часовой пружины.
27. Катетер по п.26, в котором первый участок первого элемента электрического соединения продолжается вокруг двигателя.
28. Катетер по п.1, дополнительно содержащий:
первый участок электрического проводника, содержащий множество электрических проводников с электроизолирующим материалом между ними, причем первый участок электрического проводника продолжается от проксимального конца до дистального конца; и
второй участок электрического проводника, электрически соединенный с первым участком электрического проводника на дистальном конце и содержащий множество электрических проводников;
при этом массив ультразвуковых преобразователей представляет собой массив ультразвуковых преобразователей, причем второй участок электрических проводников электрически соединен с массивом ультразвуковых преобразователей и имеет возможность изгибаться в ответ на отклонение отклоняющегося элемента, при этом массив ультразвуковых преобразователей предназначен для использования для, по меньшей мере, одного из: формирования двумерного изображения, формирования трехмерного изображения, или формирования трехмерного изображения в режиме реального времени.
29. Катетер по п.28, в котором второй участок электрического проводника имеет возможность изгибаться в ответ на колебательное движение массива ультразвуковых преобразователей.
30. Катетер по п.29, дополнительно содержащий первый участок электрического проводника для соединения со вторым участком электрического проводника.
31. Катетер по п.29, в котором второй участок электрического проводника содержит электропроводные дорожки, расположенные на гибкой подложке.
32. Катетер по п.31, в котором второй участок электрического проводника упрощает изгиб отклоняющегося устройства формирования изображения, работая как гибкая тяга между отклоняющимся устройством формирования изображения и корпусом катетера.
33. Катетер по п.1, в котором устройство активации содержит:
внутренний трубчатый корпус, продолжающийся от проксимального конца до дистального конца внутри внешнего трубчатого корпуса, причем внутренний трубчатый корпус образует проходящий через него канал, предназначенный для перемещения, по меньшей мере, одного из устройства и материала и продолжающийся от места, близкого к проксимальному концу, до отверстия, расположенного рядом с дистальным концом, при этом внешний трубчатый корпус и внутренний трубчатый корпус выполнены с возможностью избирательного перемещения друг относительно друга;
при этом, по меньшей мере, участок отклоняющегося элемента постоянно расположен за пределами внешнего трубчатого корпуса на дистальном конце, причем отклоняющийся элемент соединен с возможностью опоры с одним из внутреннего трубчатого корпуса и внешнего трубчатого корпуса, при этом после избирательного относительного перемещения отклоняющийся элемент имеет возможность избирательного отклонения заданным образом.
34. Катетер по п.33, в котором зацепление между поверхностями внутреннего трубчатого корпуса и внешнего трубчатого корпуса обеспечивает контакт, достаточный для поддержания выбранного относительного положения между внутренним трубчатым корпусом и внешним трубчатым корпусом и соответствующим отклоненным положением отклоняющегося элемента.
35. Катетер по п.33, в котором шарнир соединен с возможностью опоры с внутренним трубчатым корпусом и соединен с внешним трубчатым корпусом.
36. Катетер по п.33, дополнительно содержащий ограничительный элемент, взаимно соединенный с отклоняющимся элементом и внешним трубчатым корпусом, при этом после перемещения внутреннего трубчатого корпуса относительно внешнего трубчатого корпуса сила отклонения передается на отклоняющийся элемент с помощью ограничительного элемента.
37. Катетер по п.36, в котором любое перемещение внутреннего трубчатого корпуса относительно внешнего трубчатого корпуса вызывает соответствующее отклонение отклоняющегося элемента.
38. Катетер по п.36, в котором ограничительный элемент также представляет собой гибкий элемент электрического соединения.
39. Катетер по п.1, в котором отклоняющийся элемент имеет возможность отклоняться вокруг оси отклонения, которая смещена от центральной оси корпуса катетера.
40. Катетер по п.39, в котором ось отклонения лежит в плоскости, поперечной центральной оси.
41. Катетер по п.40, в котором ось отклонения лежит в плоскости, ортогональной центральной оси.
42. Катетер по п.39, в котором ось отклонения лежит в плоскости, которая параллельна центральной оси.
43. Катетер по п.1, в котором отклоняющийся элемент соединен с корпусом катетера с помощью тяги, при этом тяга соединяет с ограничением отклоняющийся элемент с корпусом катетера.
44. Катетер по п.43, дополнительно содержащий гибкий элемент электрического соединения, частично расположенный между отклоняющимся элементом и корпусом катетера, при этом участок гибкого элемента электрического соединения, частично расположенный между отклоняющимся элементом, и корпус катетера работает как тяга.
45. Катетер по п.43, дополнительно содержащий тягу, расположенную между отклоняющимся элементом и корпусом катетера, при этом тяга включает в себя гибкий элемент электрического соединения.
| US 2009292199 A1, 26.11.2009 | |||
| WO 2009146458 A1, 03.12.2009 | |||
| US 2009156995 A1, 18.06,2009 | |||
| WO 2008104888 A2, 04.09.2008 | |||
| US 2007038110 A1, 15.02.2007 | |||
| RU2006130412 A, 27.02.2008 |

