ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
Это изобретение относится к рукоятке управления медицинскими устройствами, в частности, рукоятке управления с несколькими механизмами, управляющими несколькими вытяжными проволоками.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электродные катетеры широко применяются в медицинской практике в течение многих лет. Они используются для стимуляции и картирования электрической активности сердца, а также для абляции участков с нарушенной электрической активностью. Фибрилляция предсердий является распространенным длительным нарушением ритма сердца и основной причиной инсульта. Это заболевание характеризуется наличием возвратных импульсов, распространяющихся в предсердной ткани. Существуют различные способы прерывания этих импульсов, в том числе атриотомия, выполняемая хирургическим путем или путем катетеризации. Перед тем как приступить к лечению заболевания, прежде всего, необходимо выявить участок прохождения импульсов. Известны различные способы такого выявления, в том числе с применением катетеров с устройством картирования, позволяющим измерить активность внутри легочной вены, венечного синуса или иной трубчатой структуры по внутренней окружности этой структуры. Одно из таких устройств картирования имеет трубчатую конструкцию, включающую по существу цилиндрическую основную часть, расположенную по существу перпендикулярно и дистально относительно корпуса катетера и имеющую наружную окружность, и дистальную часть, расположенную дистально относительно основной части. Трубчатая конструкция снабжена изолирующим покрытием, покрывающим, по меньшей мере, основную часть устройства картирования. Опорный элемент, выполненный из материала с эффектом памяти, размещен, по меньшей мере, внутри основной части устройства картирования. По существу цилиндрическая основная часть устройства картирования включает несколько пар электродов, каждая из которых состоит из двух кольцевых электродов.
На практике электродный катетер вводится в интродьюсер, установленный в основной вене или артерии, например, в бедренной артерии, и направляется в камеру сердца. Внутри камеры катетер выходит за пределы дистального конца интродьюсера, обнажая устройство картирования. Катетер позволяет преодолеть колебания при перемещении, в том числе отклонения дистальной части катетера; таким образом, устройство картирования устанавливается в трубчатом участке камеры сердца. Возможность контролировать положение и направление катетера, а также сама конструкция устройства картирования играют важную роль, во многом определяя общую пользу применения катетера.
Управляемые катетеры в целом хорошо известны. Например, в патенте США № RE 34,502 описан катетер с рукояткой управления, включающей корпус с поршневой камерой у дистального конца. Поршень расположен в поршневой камере и способен двигаться в продольном направлении. Проксимальный конец продолговатого корпуса катетера прикреплен к поршню. Вытяжная проволока прикреплена к корпусу и проходит через поршень и корпус катетера, а затем входит в концевую секцию у дистального конца корпуса катетера. Дистальный конец вытяжной проволоки закреплен в концевой секции катетера. При таком расположении элементов продольное движение поршня по отношению к корпусу приводит к изгибанию концевой секции катетера.
Такая конструкция описана в пат. США № RE 34,502 и в целом ограничена катетерами, имеющими единственную вытяжную проволоку. Если желательно изгибание в двух направлениях, возникает необходимость в использовании двух вытяжных проволок. Кроме того, если желательно более точное управление, например, сокращением системы картирования, необходима дополнительная вытяжная проволока. Кроме того, желательно, чтобы механизм приведения в действие дополнительной вытяжной проволоки был самофиксирующимся, то есть был способен удерживать систему картирования в сокращенном положении без необходимости контроля этой функции пользователем. Соответственно, имеется потребность в рукоятке управления, позволяющей перемещать третью вытяжную проволоку, которую можно использовать без участия рук человека.
Краткое описание изобретения
Настоящее изобретение относится к рукоятке управления медицинским устройством. Так как медицинские устройства, в частности, катетеры для электрофизиологических процедур, постоянно усложняются и число компонентов, необходимых для приведения их в действие, увеличивается, рукоятка управления должна обеспечивать независимое управление несколькими вытяжными проволоками. В рукоятке управления настоящего изобретения применяется первый исполнительный механизм для, по меньшей мере, одной вытяжной проволоки при одной манипуляции с медицинским устройством, в том числе изгибания в одном направлении, либо пары вытяжных проволок для изгибания катетера в двух направлениях, и второй исполнительный механизм для дополнительной вытяжной проволоки при другой манипуляции с медицинским устройством, при этом первый и второй исполнительные механизмы имеют общую ось вращения, однако их вращение не связано.
В одном варианте осуществления изобретения рукоятка управления медицинским устройством с одной вытяжной проволокой для управления одной функцией и другой вытяжной проволокой для управления другой функцией имеет первый узел исполнительного механизма и второй узел исполнительного механизма. Первый узел исполнительного механизма имеет первый исполнительный механизм, рычаг, вращающийся вдоль оси, и первый ствол. Первый изгибающий исполнительный механизм и рычаг связаны посредством вращающегося ствола, а рычаг имеет, по меньшей мере, один шкив, входящий в зацепление с вытяжной проволокой. Узел исполнительного механизма второй проволоки имеет второй исполнительный механизм и второй ствол с катушкой. При вращении пользователем первого исполнительного механизма рычаг начинает вращаться, заставляя шкив вращаться и подтягивать первую вытяжную проволоку, служащую для управления первой функцией медицинского устройства, в то время как при вращении второго исполнительного механизма вторая вытяжная проволока наматывается на катушку, служащую для управления второй функцией медицинского устройства. Несмотря на то, что первый и второй узлы исполнительного механизма расположены на одной оси и имеют общую ось вращения, что упрощает конструкцию рукоятки управления и экономит пространство в рукоятке управления, стволы каждого узла исполнительного механизма вращаются независимо друг от друга, таким образом, каждый исполнительный механизм действует независимо от другого, и приведение в действие вытяжной проволоки одного узла не влияет на вытяжную проволоку другого узла.
В более подробном описании варианта осуществления изобретения каждый узел исполнительного механизма имеет трущийся элемент, создающий силу трения между компонентами каждого узла, поэтому исполнительные механизмы самофиксирующиеся. Эта особенность позволяет обойтись без ручного контроля, то есть, пользователю не нужно удерживать исполнительный механизм для сохранения нужного положения соответствующей части медицинского устройства.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Эти и другие особенности и преимущества настоящего изобретения станут более понятными на примере следующего подробного описания в сочетании с сопроводительными фигурами. Необходимо понимать, что выбранные конструкции и элементы не показаны на некоторых фигурах для лучшего обзора остальных конструкций и элементов.
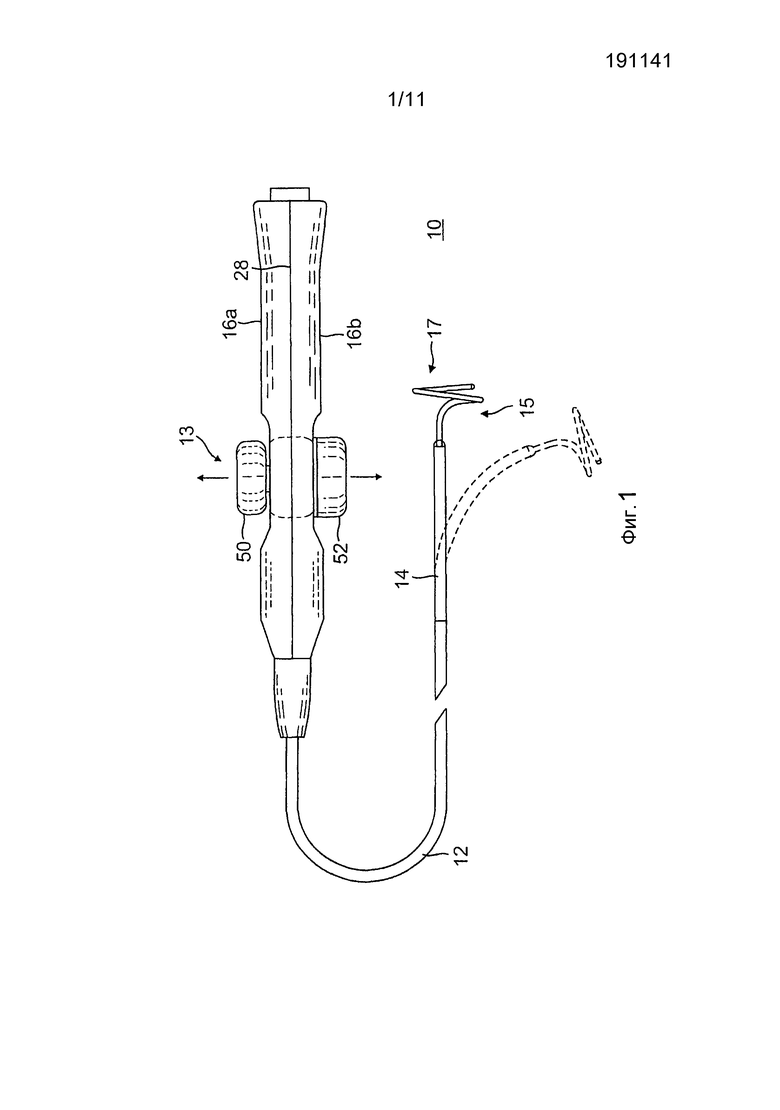
На фиг. 1 представлен вид сверху одного из вариантов осуществления катетера, составляющего предмет настоящего изобретения.
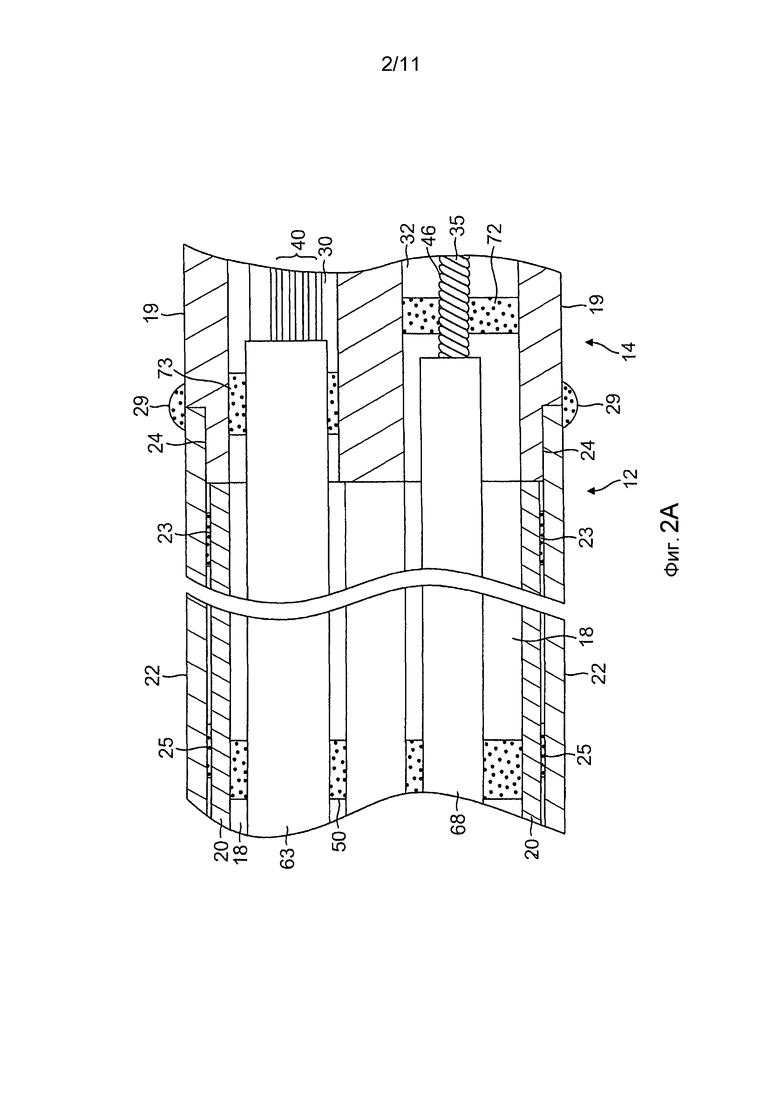
На фиг. 2A представлен вид сбоку варианта осуществления соединения между корпусом катетера и промежуточной секцией в поперечном разрезе вдоль первого диаметра.
На фиг. 2В представлен вид соединения, показанного на фиг. 2А, в сечении вдоль второго диаметра, обычно перпендикулярного первому диаметру.
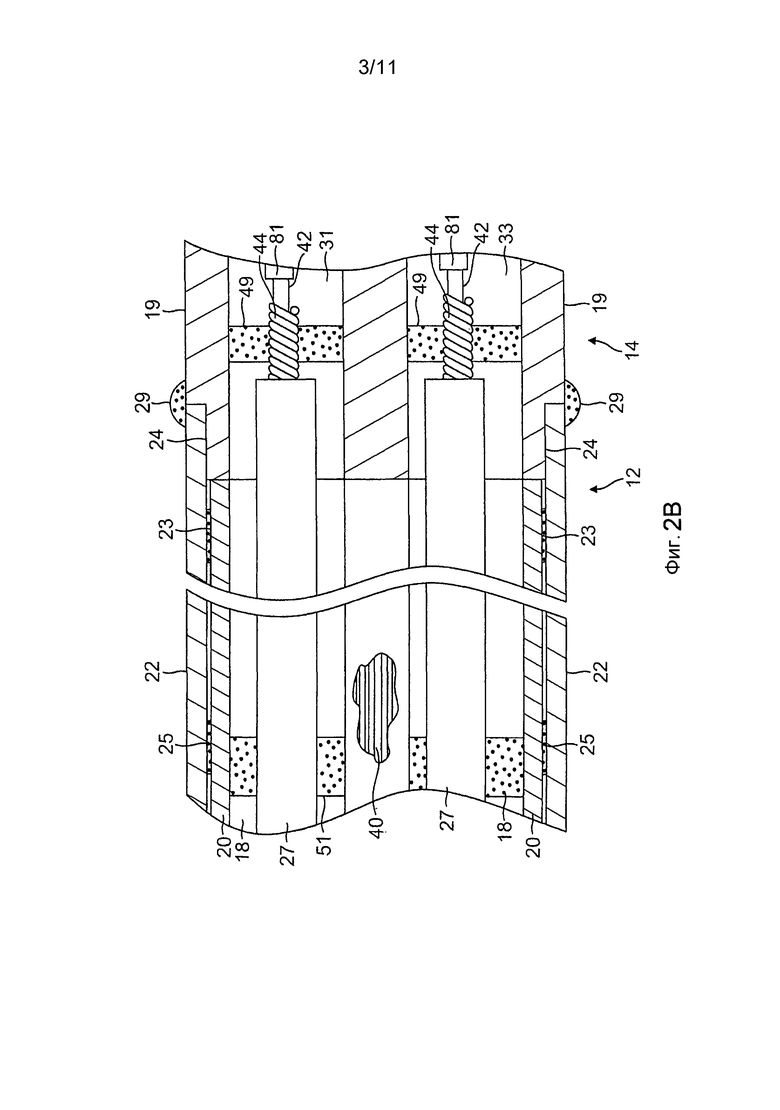
На фиг. 3 показано поперечное сечение конца промежуточной секции, показанной на фиг. 2A и 2B.
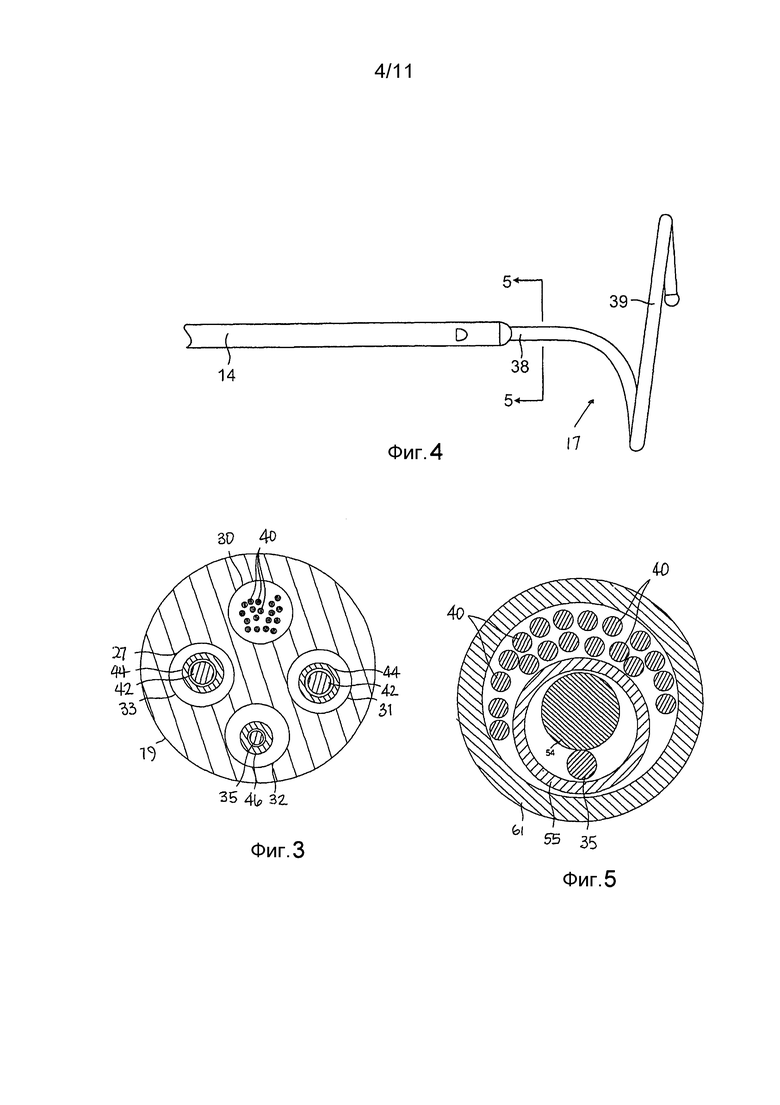
На фиг. 4 представлен вид сбоку варианта осуществления дистального узла.
На фиг. 5 показано поперечное сечение в целом прямой проксимальной части дистального узла, показанного на фиг. 4, по линии 5--5.
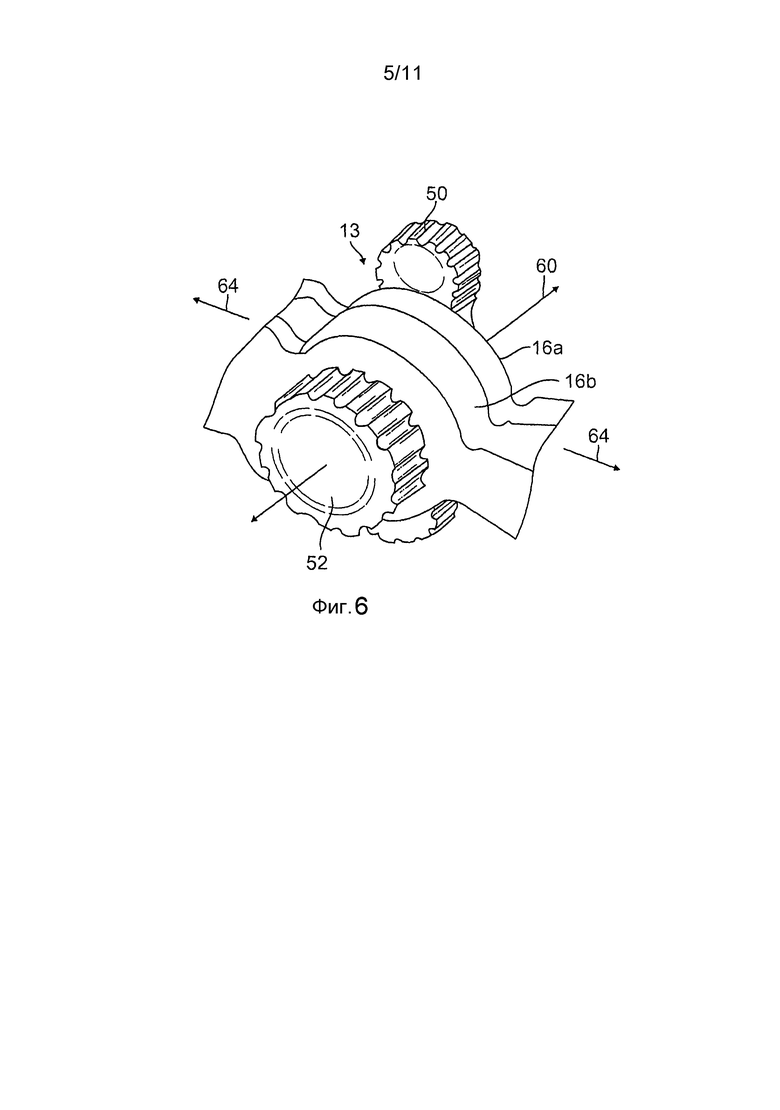
На фиг. 6 показана часть рукоятки управления, представленной на фиг. 1, с круглой ручкой и дисковым регулятором.
На фиг. 7 представлен вид сверху варианта осуществления первой половины корпуса рукоятки управления.
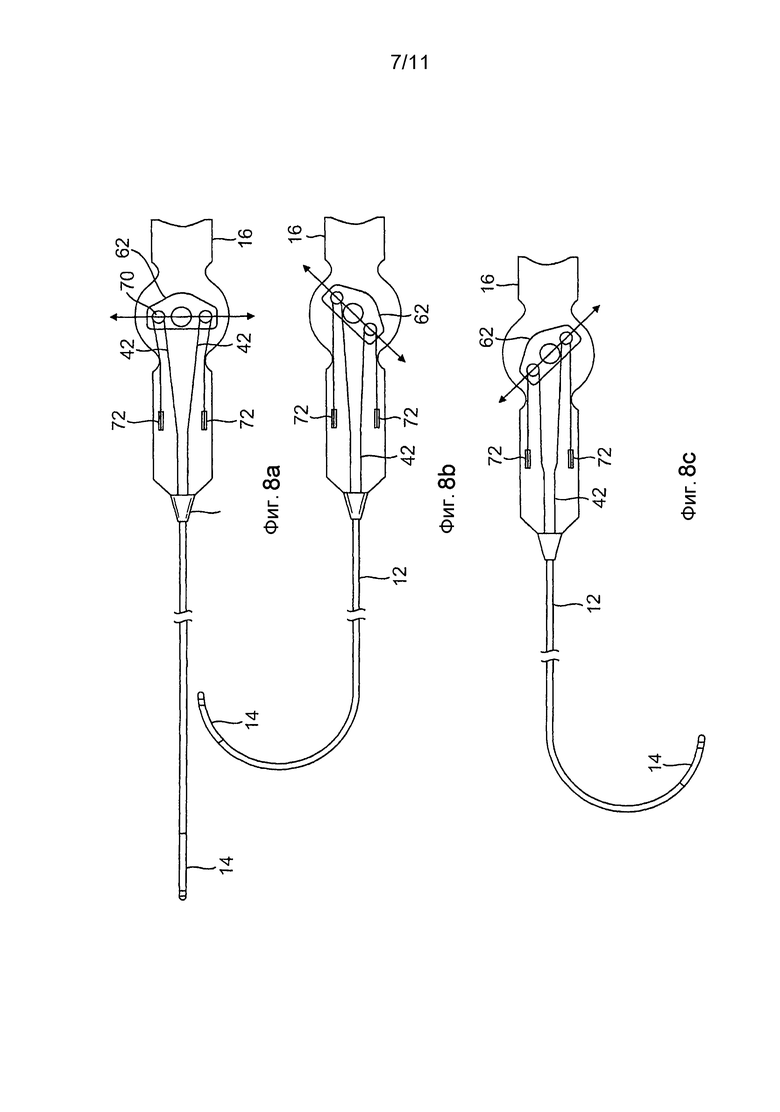
На фиг. 8А-8С представлены схемы половины корпуса рукоятки управления, показанной на фиг. 7, в нейтральной конфигурации, при изгибании вправо и при изгибании влево.
На фиг. 9 представлен вид сбоку варианта осуществления рычага шкива.
На фиг. 10 представлен вид рукоятки управления, показанной на фиг. 1, в поперечном сечении.
На фиг. 11 показано перспективное изображение вариантов осуществления блока управления и независимого узла исполнительного механизма вытяжной проволоки.
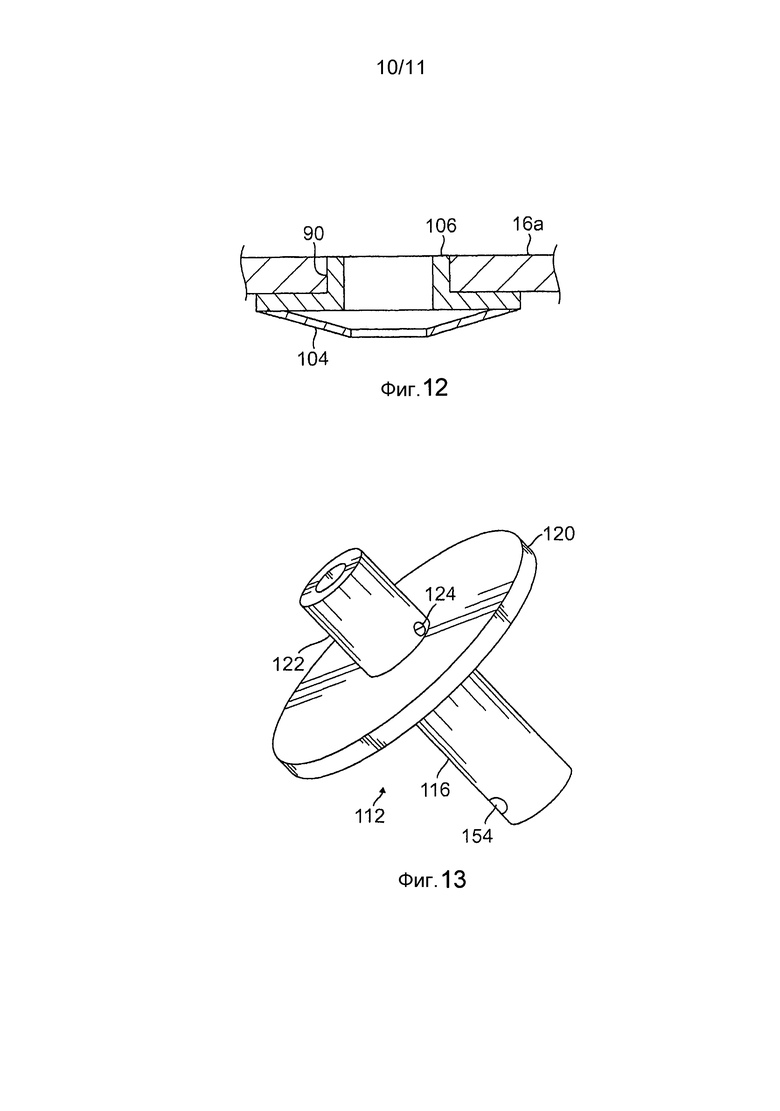
На фиг. 12 показан вид альтернативного варианта осуществления корпуса рукоятки управления в поперечном сечении сбоку.
На фиг. 13 показана схема частей варианта осуществления ствола узла исполнительного механизма.
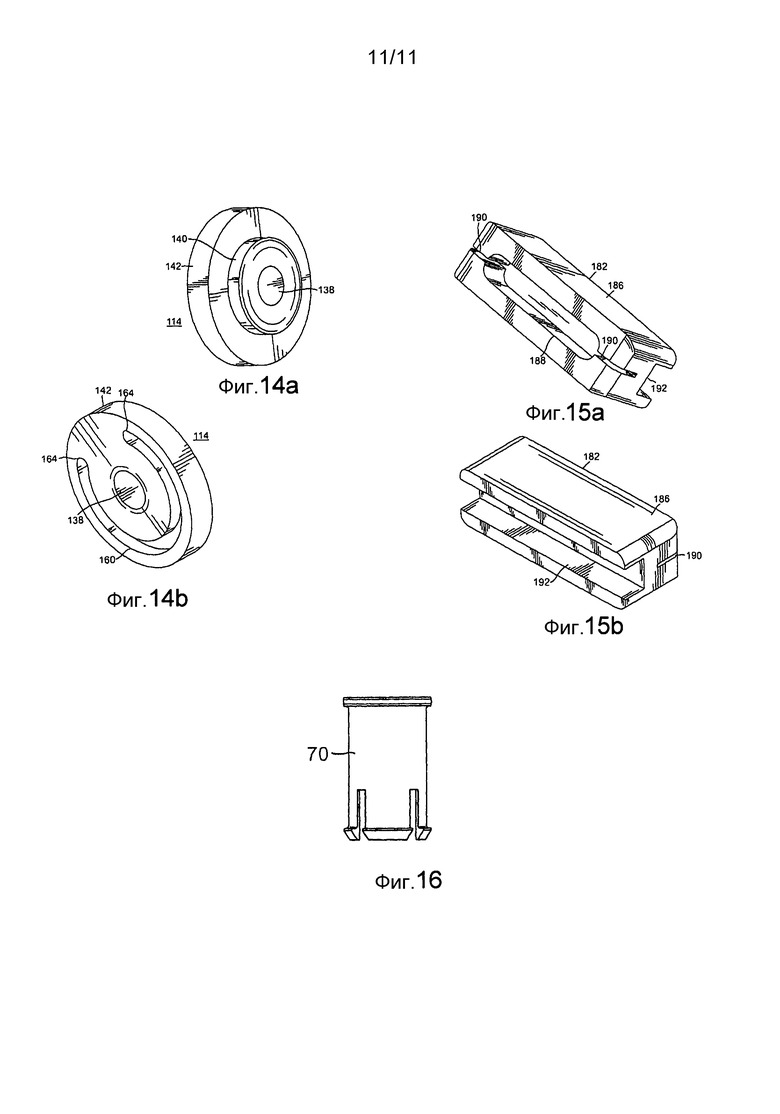
На фиг. 14А представлено перспективное изображение одной стороны варианта осуществления подшипника узла исполнительного механизма.
На фиг. 14В представлено перспективное изображение противоположной стороны подшипника, показанного на фиг. 14A.
На фиг. 15А представлено перспективное изображение одной стороне варианта осуществления каретки.
На фиг. 15В представлено перспективное изображение противоположной стороны каретки, показанной на фиг. 15А.
На фиг. 16 показан вид варианта осуществления шкива сбоку.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления 10, предназначенной для использования с медицинским устройством с, по меньшей мере, двумя натягивающимися элементами, в частности, вытяжными проволоками и т.п., для выполнения, по меньшей мере, двух независимых движений или манипуляций компонентами медицинского устройства. Рукоятка управления может использоваться с любыми медицинскими устройствами, например, катетером для электрофизиологических процедур 10, имеющим подходящую конфигурацию для картирования и/или абляции ткани, в том числе сердца, что соответствует варианту осуществления изобретения, показанному на фиг. 1. Достоинством является то, что первый исполнительный механизм используется для управления функцией медицинского устройства, а второй исполнительный механизм используется для управления другой функцией медицинского устройства.
Катетер 10 на фиг. 1 состоит из продолговатого корпуса катетера 12, изгибающейся промежуточной секции 14 и дистального конца корпуса катетера 12, при этом у дистального конца промежуточной секции 14 находится концевая секция 15, включающая дистальный узел 17 имеющий, например, спиралевидную форму. В показанном на фиг. 1 и 6 варианте осуществления изобретения рукоятка управления 16 для использования вместе с катетером имеет первый исполнительный механизм 50, например, круглую ручку для изгибания в обоих направлениях, конструкция которой подразумевает приведение в действие, по меньшей мере, одной вытяжной проволоки, либо пары проволок, идущих от рукоятки управления 16 через корпус катетера 12 и промежуточную секцию 14, для изгибания промежуточной секции в одном или двух направлениях. В соответствии с характером настоящего изобретения, ручка управления имеет второй исполнительный механизм, например, дисковый регулятор 52, находящийся напротив первого исполнительного механизма 50, для приведения в действие другой (или третьей) вытяжной проволоки для независимой манипуляции или регулировки дистального узла 17, отходящего от промежуточной секции 14, например, для сокращения спиралевидной части дистального узла. Каждый исполнительный механизм может действовать отдельно и независимо от другого исполнительного механизма и его вытяжной проволоки.
Как показано на фиг. 2A и 2B, корпус катетера 12 имеет один центральный или продольный просвет 18. Корпус катетера 12 является гибким, а именно поддающимся изгибу, но по существу несжимаемым по всей длине. Корпус катетера 12 может иметь любую подходящую конструкцию и может быть изготовлен из любого подходящего материала. В одном варианте осуществления корпус катетера 12 включает наружную стенку 22, изготовленную из полиуретана или материала PEBAX. Наружная стенка 22 включает встроенную плетеную сетку из нержавеющей стали или т.п. для повышения жесткости на скручивание корпуса катетера 12, так чтобы при вращении рукоятки управления 16 наконечник катетера 10 поворачивался соответствующим образом.
Внешний диаметр корпуса катетера 12 не имеет особого значения, но предпочтительно не должен превышать приблизительно 2,67 см (8 фр. п. ). Аналогичным образом, толщина наружной стенки 22 не имеет особого значения. Внутренняя поверхность наружной стенки 22 может быть укреплена придающей жесткость трубкой 20, которая может быть изготовлена из любого подходящего для этих целей материала, предпочтительно, полиимида. Трубка 20, придающая дополнительную жесткость, фиксируется относительно наружной стенки 22 на проксимальном конце корпуса катетера 12. Первое клеевое соединение 23 выполняется между дистальными концами упрочняющей трубки 20 и наружной стенки 22 при помощи быстросохнущего клея, например, суперклея RTM. После этого выполняется второе клеевое соединение 26 между проксимальными концами упрочняющей трубки 20 и наружной стенки 22 с использованием долгосохнущего, но более прочного клея, например полиуретанового клея.
Упрочняющая трубка 20, наряду с оплетенной наружной стенкой 22, обеспечивает повышенную устойчивость к скручивающим колебаниям, значительно сокращая толщину стенки катетера, что позволяет максимально увеличить диаметр просвета. Внешний диаметр упрочняющей трубки 20 имеет практически такую же величину или немногим меньше внутреннего диаметра наружной стенки 22. Предпочтительно использование полиимидной трубки, так как она имеет очень тонкую стенку и в то же время обладает хорошей жесткостью. Это позволяет максимально увеличить диаметр центрального просвета 18 не в ущерб прочности и жесткости. Как правило, полиимидный материал не используется для изготовления упрочняющих трубок из-за склонности к перекручиванию во время изгиба. Однако было установлено, что в комбинации с наружной стенкой 22 из полиуретана, PEBAX или подобного материала, в особенности, снабженного оплеткой из нержавеющей стали, подверженность полиимидной упрочняющей трубки 20 к перекручиванию при изгибе практически исключается при условии использования катетера по назначению.
В одном из вариантов осуществления изобретения наружная стенка 22 имеет внешний диаметр, равный приблизительно 2,34 мм (0,092 дюйма), и внутренний диаметр - приблизительно 1,60 мм (0,063 дюйма), а полиимидная упрочняющая трубка 20 имеет внешний диаметр, равный приблизительно 1,562 мм (0,0615 дюйма), и внутренний диаметр - приблизительно 1,32 мм (0,052 дюйма).
Как показано на фиг. 2A, 2B и 3, промежуточная секция 14 состоит из более короткого отрезка трубки 19 с множеством просветов, например, первым, вторым, третьим и четвертым просветами 30, 31, 32 и 33. Трубка 19 изготовлена из подходящего нетоксичного материала, предпочтительно более гибкого, чем материал корпуса катетера 12. Подходящим материалом для трубки 19 является плетеный полиуретан, то есть полиуретан с встроенной сеткой из нержавеющей стали или т.п. Внешний диаметр промежуточной секции 14, как и внешний диаметр корпуса катетера 12, предпочтительно не превышает приблизительно 2,67 мм (8 фр.п.). Размер просветов не имеет особого значения. В одном из вариантов осуществления изобретения промежуточная секция имеет внешний диаметр, равный приблизительно 2,33 мм (7 фр.п., 0,092 дюйма), просветы, как правило, имеют одинаковый размер, диаметр составляет приблизительно 0,559 мм (0,022 дюйма), а некоторые просветы могут иметь незначительно больший диаметр - приблизительно 0,914 мм (0,036 дюйма).
Средство для прикрепления корпуса катетера 12 к промежуточной секции 14 изображено на фиг. 2А и 2В. Проксимальный конец промежуточной секции 14 включает внутреннее глухое отверстие 24, принимающий внешнюю поверхность полиимидной упрочняющей трубки 20. Промежуточная секция 14 и корпус катетера 12 скреплены клеем 29 или аналогичным веществом.
Как показано на фиг. 2А и 2В, через просвет 18 корпуса катетера 12 проходят различные элементы, например, электрические провода и множество вытяжных проволок, а также иные провода и кабели. Продольное перемещение вытяжных проволок относительно корпуса катетера 12 позволяет пользователю управлять различными частями катетера, используя для этого рукоятку управления. Как уже упоминалось, в одном из вариантов осуществления изобретения предусмотрены первая и вторая вытяжные проволоки 42 для изгибания промежуточной секции 14 и третья вытяжная проволока 35 для манипуляций и регулировки дистального узла 17 концевой секции 15.
Однопросветный корпус катетера 12 может оказаться предпочтительнее корпуса с несколькими просветами, так как один просвет 18 корпуса позволяет лучше контролировать положение наконечника при вращении катетера 10. Один просвет 18 позволяет свободно разместить все проходящие по нему элементы внутри корпуса катетера. Если бы эти элементы были заключены в нескольких просветах, то в процессе вращения рукоятки 16 они смогли бы аккумулировать энергию, что может вызвать обратное вращение корпуса катетера 12, например, при отпускании рукоятки или при изгибе по кривой, или поворот на 180 градусов; при этом оба явления являются нежелательными.
Как также показано на фиг. 3, одна вытяжная проволока для изгибания 42 проходит через центральный просвет 18 корпуса катетера 12 и входит во второй просвет 31 промежуточной секции 14. Вторая вытяжная проволока для изгибания 42 проходит через центральный просвет 18 и входит в четвертый просвет 33 промежуточной секции 14. Таким образом, просветы 31 и 33 должны быть расположены не на одной оси и диаметрально противоположны друг другу для обеспечения изгибания в плоскости в двух направлениях. Дистальные концы вытяжных проволок 42 закреплены на стенке трубки 19 вблизи дистального конца промежуточной секции 14 с помощью Т-образных анкеров (не показаны), как будет очевидно специалистам в данной области. В промежуточной секции 14 каждая вытяжная проволока 42 имеет пластиковую, например тефлоновую (Teflon.RTM.), оболочку 81, которая не позволяет вытяжным проволокам 42 врезаться в стенку трубки 19 промежуточной секции 14 при отклонении промежуточной секции 14.
Как показано на фиг. 2В, компрессионные обмотки 44, окружающие вытяжные проволоки 42, проходят от проксимального конца корпуса катетера 12 к проксимальному концу промежуточной секции 14. Компрессионные обмотки 44 изготовлены из любого подходящего для этих целей металла, например, из нержавеющей стали. Компрессионные обмотки 44 имеют плотную намотку, что обеспечивает достаточную гибкость, то есть способность к изгибу, но при этом хорошую сопротивляемость сжатию. Предпочтительно, когда внутренний диаметр компрессионных обмоток 44 незначительно превышает диаметр вытяжной проволоки 42. Например, если диаметр вытяжной проволоки 42 равен приблизительно 0,18 мм (0,007 дюйма), внутренний диаметр компрессионной обмотки 44 составляет приблизительно 0,20 мм (0,008 дюйма). Тефлоновое (Teflon.RTM.) покрытие вытяжных проволок 42 позволяет им свободно скользить внутри компрессионных обмоток 44. Наружная поверхность компрессионных обмоток 44 может быть покрыта гибкой 44 изолирующей оболочкой 27, препятствующей контакту компрессионных обмоток друг с другом и с другими элементами, такими, как электрические провода и кабели и т.д. В одном из вариантов осуществления изолирующая оболочка может быть выполнена из полиимидной трубки.
Компрессионные обмотки 44 прикреплены проксимальными концами к проксимальному концу трубки для придания жесткости 20 в корпусе катетера 12 клеевым соединением 51 (фиг. 2B), а дистальными концами - к проксимальному концу промежуточной секции 14 во втором просвете 31 и четвертом просвете 33 клеевыми соединениями 49 (фиг. 2B).
Как показано на фиг. 4, у дистального конца промежуточной секции 14 расположен дистальный узел 17. Дистальный узел 17 включает по существу прямую проксимальную часть 38 и по существу кольцеобразную основную часть 39. Проксимальная часть 38 смонтирована на промежуточной секции 14, а по существу кольцеобразная основная часть содержит множество электродов для картирования и/или абляции. В варианте осуществления изобретения, показанном на фиг. 5, дистальная часть включает трубку 61. Элемент с эффектом запоминания формы 54 и проводники 40 для электродов, расположенные на дистальном узле, проходят через просвет трубки 61 и входят в промежуточную секцию 14 и корпус катетера 12.
В описанном варианте осуществления изобретения третья вытяжная проволока 35 используется для сужения обычно кольцеобразной основной части 39, что позволяет изменять или сокращать ее диаметр, например, во время картирования или абляции кольцеобразных или трубчатых структур сердца. Проксимальный конец проволоки для сужения 35 закреплен в рукоятке управления 16, как описано ниже. Проволока для сужения 35 проходит через центральный просвет 18 корпуса катетера 12, через третий просвет 32 промежуточной секции 14 (фиг. 3) и через дистальный узел 17 (фиг. 5).
Третья компрессионная обмотка 46 расположена внутри корпуса катетера 12, а ствол промежуточной секции 14 охватывает проволоку для сужения 35 (фиг. 2А). Третья компрессионная обмотка 46 проходит от проксимального конца корпуса катетера 12 и заканчивается рядом с дистальным концом третьего просвета 32 промежуточной секции 14. Третья компрессионная обмотка 46 может быть изготовлена из любого подходящего металла, например, нержавеющей стали, и должна быть плотно намотана для обеспечения гибкости, то есть способности к изгибу, но при этом обладать прочностью на сжатие. Внутренний диаметр компрессионной обмотки 46 предпочтительно должен незначительно превосходить по размеру диаметр проволоки для сужения 35. Наружная поверхность компрессионной обмотки 46 покрыта гибкой изолирующей оболочкой 68, например, изготовленной из полиимидной трубки. Третья компрессионная обмотка 46 предпочтительно выполнена из проволоки с квадратным или прямоугольным поперечным сечением. Такая проволока менее подвержена сжатию в отличие от проволоки с круглым поперечным сечением. В результате третья компрессионная обмотка 46 предохраняет корпус катетера 12, и, в частности, промежуточную секцию 14, от изгиба при совершении манипуляций с проволокой для сужения 35, направленных на сужение дистального узла 17, так как она в большей степени поглощает сжатие.
Проксимальный конец третьей компрессионной обмотки 46 фиксируется на трубке 20 для придания жесткости корпуса катетера 12 с помощью проксимального клеевого соединения, а с промежуточной секцией 14 она соединяется с помощью дистального клеевого соединения.
Необходимо понимать, что клеевые соединения на катетере 10 могут быть выполнены с использованием полиуретанового клея или аналогичного материала. Для нанесения клея используется шприц или аналогичное приспособление. Клей наносится через отверстие, предусмотренное в стенке трубки. Такое отверстие может быть выполнено, например, при помощи иглы или т.п., используемой для прокола стенки трубки, при этом игла предварительно нагревается в степени, достаточной, чтобы сформировать постоянное отверстие. После этого через отверстие вводится клей, заполняя пространство вокруг элемента (элементов) внутри трубки и образуя клеевое соединение по контуру элемента (элементов).
Проводники 40 для электродов, присоединенные к кольцевым электродам в дистальном узле 17, проходят через первый просвет 30 промежуточной секции 14 (фиг. 2А), через центральный просвет 18 корпуса катетера 12, через рукоятку управления 16, и их проксимальные концы закрепляются в коннекторе (не показан), который подключен к соответствующему монитору или другому устройству для регистрации и отображения данных, полученных от кольцевых электродов. Часть токопроводящих проводников 40, проходящих через центральный просвет 18 корпуса катетера 12, рукоятку управления 16 и проксимальный конец промежуточной секции 14, заключена в защитную оболочку 63, которая может быть изготовлена из любого подходящего для этих целей материала, предпочтительно, полиимида.
Электромагнитный датчик положения (не показан) смонтирован в дистальном узле 17 или вблизи него, в дистальном конце промежуточной секции 14. Кабель датчика 36 отходит от датчика и направляется в просвет 30 промежуточной секции (вместе с проводниками электродов 40), в центральный просвет 18 корпуса катетера 12 и в рукоятку управления, где его конец закрепляется с помощью соответствующего коннектора (не показан).
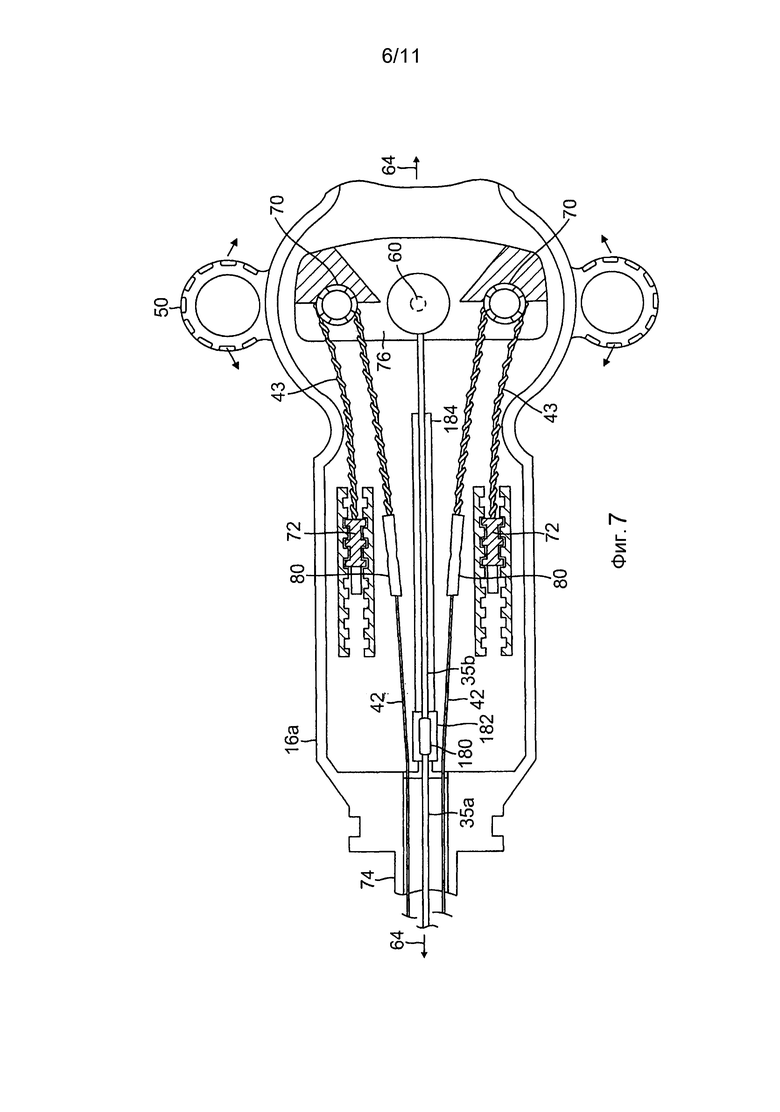
В варианте осуществления изобретения, показанном на фиг. 6 и 7, рукоятка управления 16 включает компоненты системы 13 управления положением или изгибанием, состоящей из круглой ручки 50 управления изгибом для изгибания промежуточной секции 14 в двух направлениях с помощью пары вытяжных проволок 42. Каждая вытяжная проволока 42 изготовлена из подходящего металла, такого как нержавеющая сталь или нитинол. В предпочтительном варианте осуществления каждая вытяжная проволока имеет покрытие с низким коэффициентом трения, например тефлоновое покрытие (Teflon.RTM.) и т.п. Диаметр вытяжной проволоки предпочтительно находится в пределах от приблизительно 0,15 мм (0,006 дюйма) до приблизительно 0,305 мм (0,012 дюйма). Обе вытяжные проволоки предпочтительно должны иметь одинаковый диаметр. Вместо круглой вытяжной проволоки допускается использование плоской вытяжной проволоки. При этом размер поперечного сечения плоской проволоки должен быть таким, чтобы обеспечить прочность на разрыв, сопоставимую с прочностью круглой вытяжной проволоки.
Альтернативно, вытяжные проволоки можно заменить эластичным волокном, полностью или частично. Каждое эластичное волокно может быть высокомодульным, с предельной прочностью на разрыв в пределах 2480-3200 МПа (412-463 тыс. фунтов на кв. дюйм), например, полиэтилен высокой плотности (например, Spectra™ или Dyneema™), скрученное параарамидное волокно (например, Kevlar™), канат, сформованный из расплавленных жидкокристаллических полимерных волокон (например, Vectran™), или высокопрочное керамическое волокно (например, Nextel™). В рамках настоящего документа термины «волокно» и «волокна» являются взаимозаменяемыми в том смысле, что эластичное волокно может иметь тканую или оплетенную структуру. В любом случае эти материалы обладают эластичностью, обеспечивая требуемую продолжительность службы при использовании в намотке на ролики и т.п. и лучшую управляемость изгибом кончика катетера. Кроме того, такие материалы практически не растягиваются, что улучшает ответную реакцию на манипуляции рукоятки управления, и являются немагнитными, благодаря чему они хорошо просвечиваются при МРТ. Низкая плотность материала позволяет ему оставаться проницаемым для рентгеновского аппарата. Материалы также не обладают электропроводностью во избежание короткого замыкания. Материал Vectran™, например, имеет высокую прочность и износоустойчивость, является диэлектриком, не намагничивается; это полимерный материал с низкой деформацией растяжения в условиях длительного нагружения. Таким образом, очевидно, что термин "проволока", использующийся в настоящем документе, может означать проволоку или эластичное волокно, включающее сегмент(ы) из проволоки и сегмент(ы) из эластичного волокна.
Подходящий узел регулировки изгиба с дисковым регулятором изгибания и регулировкой натяжения описан в патенте США № 7377906 в полностью включен в настоящий документ посредством ссылки. При описании настоящего изобретения мы будем ссылаться на вариант осуществления, показанный на фиг. 1, 6 и 7. Рукоятка управления 16 состоит из обычно продолговатого корпуса рукоятки, который может быть изготовлен из подходящего жесткого материала. Корпус может состоять из одной части или из двух половин 16а и 16b, соединенных с помощью клея, ультразвуковой сварки или другими подходящими способами. Узел управления 13 обеспечивает изгибание промежуточной секции 14 в двух направлениях при повороте круглой ручки 50 пользователем. Ось вращения 60 узла управления располагается по существу центрально по отношению к его компонентам. Ось 60 в целом перпендикулярна продольной оси 64 рукоятки управления.
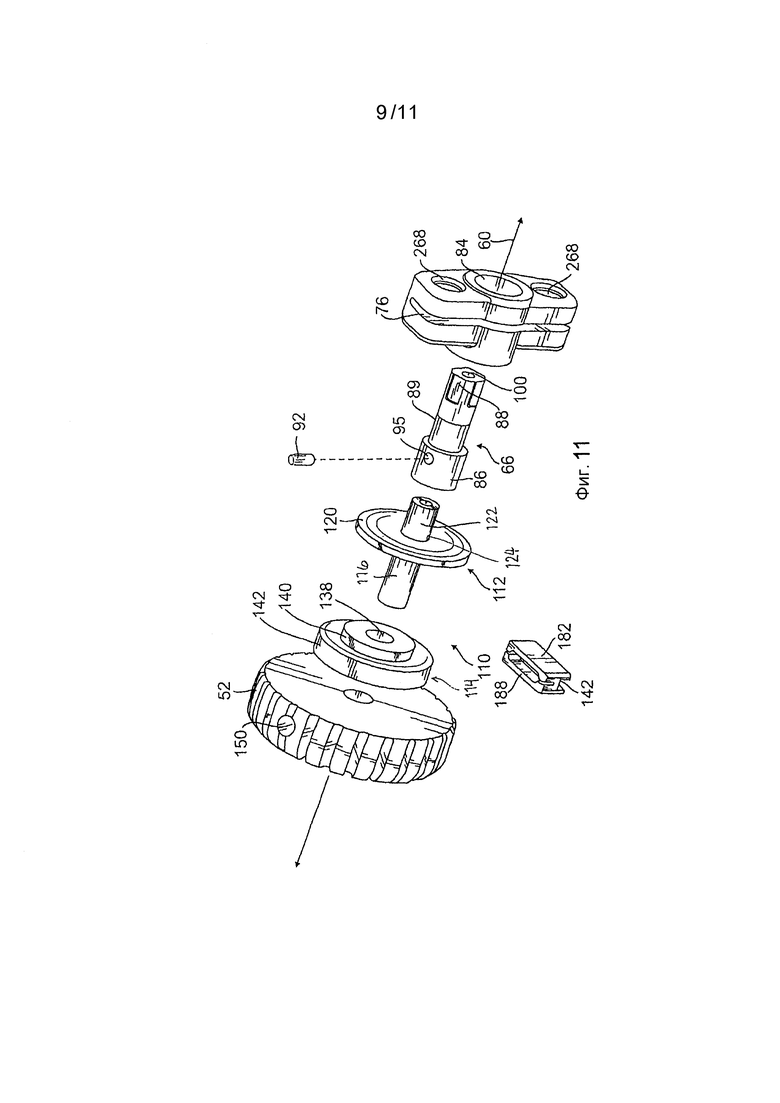
Как показано на фиг. 10 и 11, узел управления 13 включает первую ручку управления 50, вращающийся рычаг шкива 62 и ствол первого исполнительного механизма. Ствол имеет конец меньшего диаметра 88, среднюю секцию 89 и конец большего диаметра с охватывающим соединением, а также продольное отверстие 100 на всю длину ствола. Длина ствола 66 больше толщины рычага 62, поэтому только средняя секция 89 и более толстый конец 86 проходят через центральное отверстие 84 рычага 62, а конец меньшего диаметра 88 выступает за его пределы. Рычаг имеет два отверстия 268, расположенные друг напротив друга и по обеим сторонам ствола 66. В каждом отверстии располагается шкив 70 (фиг. 16), входящий в зацепление с соответствующей вытяжной проволокой 42, намотанной на шкив, и воздействующий на нее. Вращение рычага 62 и ствола 66 связано благодаря запрессованному соединительному штырю 92, проходящему в поперечном направлении через отверстие 94, сформированное в рычаге 62 (фиг. 9) и отверстие 95 (фиг. 11), сформированное в конце большего диаметра 86. Следует отметить, что штырь не выступает в отверстие 100 ствола 66.
Конец меньшего диаметра 88 ствола 66 вставляется через сквозное отверстие 90, сформированное в корпусе 16а, и входит в центральное отверстие 82 круглой ручки 50. Вращение ручки 50 и конца 88 связано за счет взаимосвязанной конфигурации многоугольного сечения, например, квадратного, шестиугольного или восьмиугольного. Таким образом, чтобы согнуть катетер, нужно повернуть ручку 50 в одном направлении, что приведет к вращению ствола 66 и рычага в том же направлении. Как показано на фиг. 8a-8c, шкив 70 в направлении вращения ручки 50 натягивает вытяжную проволоку 42, приводя к изгибанию промежуточной секции 14 в том же направлении, в то время как противоположный шкив 70 освобождает проволоку 42. Такое координированное натяжение и освобождение пары вытяжных проволок обеспечивает изгибание промежуточной секции 14.
Как показано на фиг. 7 и 9, пара вытяжных проволок 42 входит в рукоятку управления 16 через отверстие 74 в дистальном конце рукоятки управления. Вытяжные проволоки входят в рычаг 62 через прорезь 76, сформированную в рычаге (фиг. 9), и фрагмент каждой проволоки перед выходом из прорези рычага 76 обернут или намотан на соответствующий шкив 70 под углом примерно 180 градусов.
Из-за повторяющихся циклов изгибания каждая вытяжная проволока может находиться в зацеплении со шкивом, сегмент каждой проволоки в рукоятке управления может содержать, особенно в зоне вокруг шкивов, сегмент из эластичного волокна, как описано выше, который лучше выдерживает нагрузку и напряжение. С этой целью предусмотрен обжимной коннектор 80 для соединения проксимального конца проволочного сегмента первой и второй вытяжных проволок 42а с дистальным концом соответствующего сегмента из эластичного волокна 42b.
Как лучше всего видно на фиг. 10, первый фиксирующий стяжной болт 96 вставляется через отверстие 98, ведущее к сквозному отверстию 82 круглой ручки регулировки изгибания 50 и входит в продольное отверстие 100 первого ствола 66. Стяжной винт 96 с плоской головкой закрепляет круглую ручку 50 на стволе 66. В свою очередь, ствол 66 скрепляет рычаг 62 и корпус 16а друг с другом. В месте соединения между средней секцией 89 и концом круглого сечения с большим диаметром и охватывающим соединением 86 ствола 66 плечо 102 примыкает к меньшему внутреннему диаметру сквозного отверстия 84 рычага 62. Таким образом, концевая часть 86 с охватывающим соединением натягивается за счет рычага 62, а фиксирующий стяжной винт 96 поджимается к ручке 50. Таким образом, компоненты узла управления изгибом 13, в том числе рычаг 62, ствол 66, ручка 50 и фиксирующий стяжной винт 96, расположены в целом внутри корпуса 16а.
Узел управления изгибанием в двух направлениях 13 также включает трущийся элемент, включающий шайбу 104, например, тарельчатую шайбу, для осуществления возможности фиксации круглой ручки 50 в одном положении. В показанном на фиг. 10 варианте осуществления изобретения шайба 104 расположена на стволе 66 между корпусом рукоятки 16а и рычагом 62. Шайба прижата фиксирующим стяжным винтом 96 и соприкасается с поверхностью корпуса 16а и рычага 62, что создает силу трения, удерживающую ручку 50 в положении, установленном пользователем, и, таким образом, удерживает установленную степень изгиба промежуточной секции 14. С этой целью корпус может быть изготовлен из пластического материала со стекловолокном, например, содержащего примерно 30% стекловолокна по объему, для снижения риска постоянной деформации при длительной нагрузке в результате сжатия шайбы. На фиг. 12 представлен альтернативный вариант осуществления изобретения, в котором металлокерамический подшипник скольжения 106 окружает сквозное отверстие 90 корпуса рукоятки 16а (например, изготовленный путем заливки) для предотвращения постоянной деформации или люфта корпуса рукоятки в результате длительной компрессионной нагрузки.
Во второй половине корпуса 16b расположен второй независимый исполнительный механизм 110 с вытяжной проволокой, включающий второй ствол 112, подшипник 114 и дисковый регулятор 52. С целью регулировки трения при приведении в действие дискового регулятора третьей вытяжной проволоки ствол 112, показанный на фиг. 13, включает продолговатый корпус ствола 116, катушку на одном конце, имеющую кольцо 120 и цилиндр 122, на который намотана и на котором закреплена проксимальная часть третьей вытяжной проволоки или сокращающей проволоки 35, например, с помощью узла, завязанного через отверстие 124, проходящее через корпус ствола в поперечном направлении. Большая часть цилиндра входит в сквозное отверстие 100 первого ствола 66 со стороны концевой части большего диаметра с охватывающим соединением 86, таким образом, первый и второй стволы 66 и 112 располагаются по одной оси. Благодаря сужению 132 в отверстии 100 ствола 66, располагающемуся на определенной глубине, между рычагом 62 и кромкой 120 создается промежуток 130, таким образом, узкий участок цилиндра выступает в промежуток 130, что позволяет третьей вытяжной проволоке наматываться на цилиндр при вращении второго ствола 112. Третья натяжная проволока 35 располагается между кромкой 120 и рычагом 62 для максимального снижения риска зажатия других компонентов внутри рукоятки управления. Следует отметить, что сквозное отверстие 100 у конца большего диаметра с охватывающим соединением 86 имеет такой размер, что, хотя стволы 66 и 112 расположены на одной оси и, следовательно, имеют общую ось вращения, они не связаны друг с другом и, следовательно, могут вращаться независимо. Они действуют как радиальные подшипники скольжения.
Корпус ствола 116 с другой стороны кромки 112 вставляется через подшипник 114 и центральное частичное отверстие во втором дисковом регуляторе 52. Как показано на фиг. 14а, подшипник 114 имеет круглую дисковидную часть 141 меньшего диаметра, расположенную в сквозном отверстии 138, сформированном в половине корпуса 16b. Подшипник 114 также имеет кольцевую дискообразную часть 142 большего диаметра, прилегающую к дисковому регулятору 52. Очевидно, что подшипник 114 может формоваться как часть половины корпуса рукоятки управления.
Два противоположных поперечных отверстия 150 сообщаются с центральным неполным отверстием 136 дискового регулятора 52. Фиксирующий винт 152 вставляется в каждое отверстие для создания трущегося контакта с корпусом ствола 116 с целью стыковки дискового регулятора 52 и ствола 112 при их вращении.
В дисковом регуляторе 52 сформировано сквозное отверстие 156, смещенное от центра и параллельное стволу 112. Отверстие сообщается с С-образным желобком 160, сформированным на внешней поверхности части большего диаметра 142 подшипника 114 (фиг. 14b). Запрессованный штырь 162, вставляемый в отверстие 156, входит своим концом в этот желобок и движется в нем. Концы 164 желобка действуют как стопоры для штыря 162, ограничивая амплитуду вращения дискового регулятора 52 при установке минимального и максимального перемещения третьей вытяжной проволоки 35 для регулировки дистального узла 17. Очевидно, что желобок и его концы могут формоваться как часть половины корпуса рукоятки управления.
Второй фиксирующий стяжной винт 168 входит в продольное неполное отверстие 136 дискового регулятора 52 и затем входит во второй ствол 112 через сквозное отверстие 113. Фиксирующий стяжной винт 168 закрепляет дисковый регулятор 52 на втором стволе 112. В свою очередь, ствол 112 скрепляет подшипник 114 и половину корпуса 16а друг с другом. Таким образом, ствол 112 и подшипник 114 обычно располагаются внутри половины корпуса 16b. Чтобы затянуть второй фиксирующий винт 168, можно вставить отвертку или шестигранный ключ глубоко в продольное отверстие 100 вращающегося ствола (не устанавливая первый фиксирующий стяжной винт 96) до отверстия 113 цилиндра второго ствола 112, чтобы удерживать ствол 112 в неподвижности. Отвертка или шестигранный ключ входит в соответствующую прорезь для отвертки или секцию шестигранного сечения, сформированную в сквозном отверстии 100 цилиндра 122. Первый фиксирующий стяжной винт 96 можно вставить и затянуть, удерживая круглую ручку управления изгибом 50 (вдоль ствола 66) неподвижно.
Исполнительный механизм с третьей натяжной проволокой 110 включает второй трущийся элемент, включающий шайбу 170, например, тарельчатую шайбу, для фиксации дискового регулятора 52 в одном положении. В показанном варианте осуществления изобретения шайба располагается на втором стволе 112 между кромкой 120 и подшипником 114. Большая поверхность контакта кромки создает силу трения, обеспечивающую фиксацию дискового регулятора 52 в угловом положении. Кроме того, шайба прижимается вторым фиксирующим стяжным винтом 168 и создает силу трения с контактной поверхностью кромки 120 и подшипником 114 для удержания дискового регулятора в положении, установленном пользователем, то есть фиксации положения дистального узла 17.
Так как проволока 35, намотанная на цилиндр 122, постоянно испытывает воздействие изгибающих сил, проволока для сжатия 35 внутри рукоятки управления может включать сегмент из эластичного волокна, лучше выдерживающий нагрузки и натяжение. С этой целью предусмотрен коннектор 180 (фиг. 9) для соединения проксимального конца третьей вытяжной проволоки 35а с дистальным концом сегмента эластичного волокна 35b. Как показано на фиг. 15а и 15b, в коннектор 180 входит каретка 182, перемещающаяся вдоль центрального разделительного ребра 184 (фиг. 7), сформированного в корпусе рукоятки 16а, которое также служит упрочняющим элементом рукоятки управления. Каретка имеет прямоугольный корпус 186 с углублением 188, в котором располагается коннектор. В корпусе 186 сформировано два входных отверстия 190, вмещающие сегмент 35а третьей вытяжной проволоки с одного конца коннектора 180 и эластичное волокно 35b с другого конца. На нижней стороне корпуса каретки находится продолговатая прорезь 192, в которую входит ребро 184. Ребро идет в продольном направлении между первой и второй вытяжными проволоками 42 и в основном параллельно им.
На практике в организм пациента вводится соответствующий интродьюсер, дистальный конец которого устанавливается в необходимом положении. Примером интродьюсера, подходящего для использования совместно с настоящим изобретением, является оплетенный интродьюсер Preface.TM. производства компании Biosense Webster, Inc. (Даймонд-Бар, Калифорния). Дистальный конец интродьюсера направляется в одну из камер, например, в одно из предсердий. Катетер, составляющий вариант осуществления настоящего изобретения, продвигается через интродьюсер до тех пор, пока его дистальный конец не выйдет за пределы дистального конца интродьюсера. Пока катетер продвигается через интродьюсер, дистальный узел 17 находится в выпрямленном состоянии, чтобы беспрепятственно проходить через интродьюсер. После того как дистальный конец катетера устанавливается в необходимом положении, интродьюсер вытягивается в проксимальном направлении, освобождая гибкую промежуточную секцию 14 и дистальный узел 17, после чего дистальный узел 17 вновь приобретает исходную форму благодаря эффекту памяти.
Путем манипуляций и вращения дискового регулятора 50 для изгибания промежуточной секции 14 дистальный узел 17 вводится в легочную вену или иную трубчатую структуру (например, в верхнюю полую вену или нижнюю полую вену) так, чтобы внешний контур по существу кольцеобразной основной части 39 узла 17 соприкасался с внутренним контуром трубчатой структуры. Поворот дискового регулятора 50 в одном направлении заставляет промежуточную секцию 14 изгибаться в этом направлении. Поворот дискового регулятора 50 в противоположном направлении заставляет промежуточную секцию 14 изгибаться в противоположном направлении. Предпочтительно, чтобы, по меньшей мере, 50%, более предпочтительно - по меньшей мере 70%, а в наиболее предпочтительном варианте - по меньшей мере около 80% контура по существу кольцеобразной основной части соприкасалось с внутренним контуром трубчатой структуры.
Кольцевое размещение электродов на по существу кольцеобразной части 39 позволяет измерить электрическую активность по контуру трубчатой структуры - это позволяет распознать эктопические систолы между электродами. Размер по существу кольцеобразной основной части 39 позволяет измерить электрическую активность вдоль диаметра легочной вены или других трубчатых структур сердца или в области сердца, благодаря тому, что диаметр по существу кольцеобразной основной части соответствует диаметру легочной вены или венечного синуса. Путем манипуляций с дисковым регулятором 52 в целом кольцеобразная основная часть 39 регулируется в соответствии с размером легочной вены или другой трубчатой структуры. В описанном варианте осуществления изобретения путем вращения дискового регулятора в одном направлении проволока для сужения 36 смещается проксимально, натягиваясь и уменьшая диаметр, как правило, кольцеобразной основной части 39. При вращении дискового регулятора в другом направлении проволока для сужения 35 ослабляется и, как правило, кольцеобразная основная часть 39 принимает исходный диаметр.
Предшествующее описание изложено со ссылкой на предпочтительные на данный момент варианты осуществления изобретения. Специалистам в области техники и технологии, к которой принадлежит настоящее изобретение, будет понятно, что описанная конструкция допускает модификации и изменения, не нарушающие принципы и сущность настоящего изобретения и не выходящие за рамки его объема. Например, катетер можно отрегулировать так, чтобы третья вытяжная проволока выдвигала и втягивала другой компонент, например, проводник или иглу. Специалисту в данной области техники понятно, что фигуры необязательно представлены в определенном масштабе. Соответственно, вышеприведенное описание не следует рассматривать как относящееся исключительно к конкретным структурам, описанным и проиллюстрированным прилагаемыми чертежами, но его следует рассматривать в соответствии и в качестве дополнения к приведенным ниже пунктам формулы изобретения, которые должны четко и во всей полноте описать сферу данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рукоятка управления медицинским устройством | 2012 |
|
RU2617271C2 |
| САМОФИКСИРУЮЩАЯСЯ РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКОГО УСТРОЙСТВА С МЕХАНИЗМОМ СЦЕПЛЕНИЯ С КУЛАЧКОВЫМ ПРИВОДОМ | 2012 |
|
RU2608440C2 |
| РУКОЯТКА УПРАВЛЕНИЯ МЕДИЦИНСКИМ УСТРОЙСТВОМ С МНОЖЕСТВОМ ПРОВОЛОК НАТЯЖЕНИЯ | 2012 |
|
RU2594817C2 |
| КАТЕТЕР С ОДНООСНЫМИ ДАТЧИКАМИ | 2011 |
|
RU2503408C2 |
| ДВОЙНАЯ ПЕТЛЯ С ОДИНАРНЫМ УПРАВЛЯЮЩИМ ПРОВОДОМ ДЛЯ ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2013 |
|
RU2636180C2 |
| КАТЕТЕР, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ НЕПОСРЕДСТВЕННОГО КОНТАКТА С ТКАНЯМИ | 2012 |
|
RU2609457C2 |
| КАТЕТЕР С РЕГУЛИРУЕМОЙ ДУГООБРАЗНОЙ ДИСТАЛЬНОЙ СЕКЦИЕЙ | 2012 |
|
RU2542088C2 |
| ОРОШАЕМЫЙ КАТЕТЕР С ВСТРОЕННЫМ ДАТЧИКОМ ПОЛОЖЕНИЯ | 2011 |
|
RU2592780C2 |
| ЭЛЕКТРОФИЗИОЛОГИЧЕСКИЙ КАТЕТЕР | 2014 |
|
RU2675085C2 |
| КАТЕТЕР С ОХЛАЖДЕНИЕМ НА НЕАБЛЯЦИОННОМ ЭЛЕМЕНТЕ | 2013 |
|
RU2674887C2 |

Группа изобретений относится к медицинской технике, а именно к рукоятке управления медицинским устройством, в частности к рукоятке управления с несколькими механизмами, управляющими несколькими вытяжными проволоками, и к катетеру, управляемому такой рукояткой. Рукоятка управления для медицинского устройства, которое имеет по меньше мере первую функцию и вторую функцию, регулируемую пользователем. Медицинское устройство дополнительно включает по меньше мере первую вытяжную проволоку и вторую вытяжную проволоку для управления первой и второй функциями. Рукоятка управления включает в себя: корпус, состоящий из первой и второй частей; первый узел исполнительного механизма и второй узел исполнительного механизма, независимо вращающиеся вокруг общей оси вращения. Первый узел исполнительного механизма включает первый исполнительный механизм, рычаг, вращающийся вокруг указанной общей оси вращения, и первый ствол. Первый исполнительный механизм и рычаг связаны с возможностью вращения посредством первого ствола. Рычаг имеет по меньшей мере один шкив. Первая вытяжная проволока находится в зацеплении с указанным по меньшей мере одним шкивом. Второй узел исполнительного механизма содержит второй исполнительный механизм и второй ствол с катушкой. Вращение первого исполнительного механизма приводит к вращению рычага, перемещая по меньшей мере один шкив, для вытягивания первой вытяжной проволоки с целью управления первой функцией медицинского устройства, в то время как вращение второго исполнительного механизма приводит к наматыванию второй вытяжной проволоки, служащей для управления второй функцией медицинского устройства, на катушку. Катетер содержит: продолговатый корпус; дистальный узел с регулируемой конфигурацией; первую и вторую вытяжные проволоки, проходящие через продолговатый корпус; третью натяжную проволоку, проходящую через продолговатый корпус и дистальный узел; и упомянутую ранее рукоятку управления. Изобретения позволяют контролировать более точное положение и направление катетера. 2 н. и 11 з.п. ф-лы, 16 ил.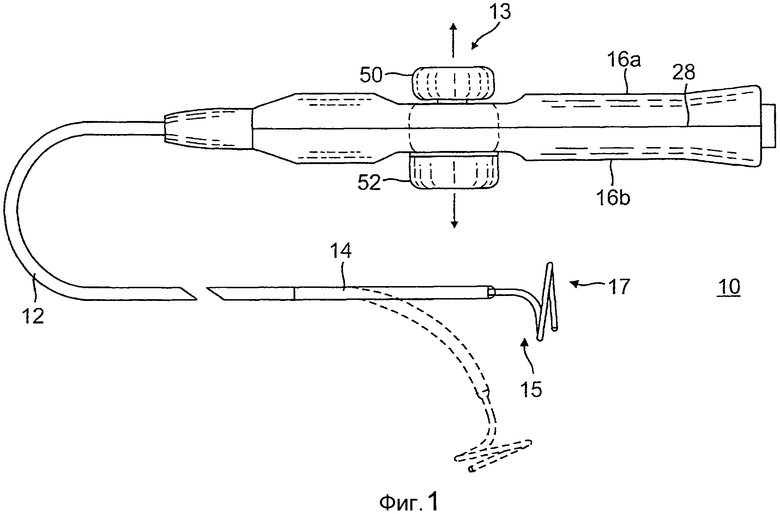
1. Рукоятка управления для медицинского устройства, которое имеет по меньшей мере первую функцию и вторую функцию, регулируемую пользователем; причем медицинское устройство дополнительно включает по меньшей мере первую вытяжную проволоку и вторую вытяжную проволоку для управления первой и второй функциями соответственно; рукоятка управления включает в себя:
корпус, состоящий из первой и второй частей;
первый узел исполнительного механизма и второй узел исполнительного механизма, независимо вращающиеся вокруг общей оси вращения,
указанный первый узел исполнительного механизма включает первый исполнительный механизм, рычаг, вращающийся вокруг указанной общей оси вращения, и первый ствол, причем первый исполнительный механизм и рычаг связаны с возможностью вращения посредством первого ствола; указанный рычаг имеет по меньшей мере один шкив, при этом первая вытяжная проволока находится в зацеплении с указанным по меньшей мере одним шкивом;
указанный второй узел исполнительного механизма содержит второй исполнительный механизм и второй ствол с катушкой,
при этом вращение первого исполнительного механизма приводит к вращению рычага, перемещая по меньшей мере один шкив, для вытягивания первой вытяжной проволоки с целью управления первой функцией медицинского устройства, в то время как вращение второго исполнительного механизма приводит к наматыванию второй вытяжной проволоки, служащей для управления второй функцией медицинского устройства, на катушку.
2. Рукоятка управления по п. 1, в которой первый ствол имеет конец с охватывающим соединением, а второй ствол имеет конец с охватываемым соединением, и конец второго ствола входит в конец первого, таким образом, первый и второй стволы расположены на одной оси.
3. Рукоятка управления по п. 2, в которой первый и второй стволы вращаются независимо друг от друга.
4. Рукоятка управления по п. 1, в которой первый узел исполнительного механизма включает первое прижимное устройство для создания трения, чтобы удерживать первый исполнительный механизм в угловом положении.
5. Рукоятка управления по п. 1, в которой второй узел исполнительного механизма включает второе прижимное устройство для создания трения, чтобы удерживать второй исполнительный механизм в угловом положении.
6. Рукоятка управления по п. 4, в которой первый узел исполнительного механизма включает первый винт для регулировки силы сжатия первого прижимного устройства для создания трения.
7. Рукоятка управления по п. 5, в которой второй узел исполнительного механизма включает второй винт для регулировки силы сжатия второго прижимного устройства для создания трения.
8. Рукоятка управления по п. 1, в которой второй узел исполнительного механизма дополнительно включает стопор для ограничения диапазона вращения второго исполнительного механизма.
9. Рукоятка управления по п. 8, в которой второй узел исполнительного механизма включает подшипник, как правило, расположенный между катушкой и вторым исполнительным механизмом.
10. Рукоятка управления по п. 9, в которой подшипник имеет желобок, а второй исполнительный механизм выполнен с пальцем, который выполнен с возможностью движения в указанном желобке.
11. Рукоятка управления по п. 1, в которой рукоятка управления имеет продольную ось, по существу, перпендикулярную общей оси вращения.
12. Рукоятка управления по п. 1, когда медицинское устройство имеет в составе еще одну вытяжную проволоку и первый исполнительный механизм включает в себя по меньшей мере два шкива, причем каждый из указанных по меньшей мере двух шкивов находится в зацеплении с соответствующей вытяжной проволокой для изгибания медицинского устройства в двух направлениях.
13. Катетер, содержащий:
продолговатый корпус;
дистальный узел с регулируемой конфигурацией;
первую и вторую вытяжные проволоки, проходящие через продолговатый корпус;
третью натяжную проволоку, проходящую через продолговатый корпус и дистальный узел; и
рукоятку управления, выполненную по любому из пп. 1-12.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| УСТРОЙСТВО ДЛЯ КАТЕТЕРИЗАЦИИ СОСУДОВ | 1989 |
|
RU2033108C1 |
| US 6033378 A, 07.03.2000 | |||
| US 5891088 A, 06.04.1999 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 5195968 A, 23.03.1993. | |||

