ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к гибридному транспортному средству, оборудованному двигателем внутреннего сгорания, электродвигателем, устройством накопления электроэнергии и автоматической трансмиссией.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Традиционно известно гибридное транспортное средство, оборудованное автоматической трансмиссией, имеющее первый входной вал, который избирательно присоединен к выходному валу через множество зубчатых передач, устанавливающих ступени переключения передач, и который подсоединен к электродвигателю, второй входной вал, который избирательно подсоединен к выходному валу через множество зубчатых передач, устанавливающих ступени скоростей, первое сцепление, допускающее переключение между состоянием передачи, передающим движущую силу двигателя внутреннего сгорания на первый входной вал, и разомкнутым состоянием, которое размыкает трансмиссию, и второе сцепление, допускающее переключение между состоянием передачи, передающим движущую силу двигателя внутреннего сгорания на второй входной вал, и разомкнутым состоянием, которое размыкает трансмиссию (например, ссылка на патентный документ 1).
ССЫЛКА НА ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
ПАТЕНТНЫЙ ДОКУМЕНТ
Патентный документ 1: Выложенный патент Японии, № 2002-89594
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Однако патентный документ 1 умалчивает о выборе состояния движения между движением ENG только посредством движущей силы двигателя внутреннего сгорания, движением EV только посредством движущей силы электродвигателя, движением HEV посредством движущей силы двигателя внутреннего сгорания и электродвигателя и выборе ступеней скорости.
Настоящее изобретение нацелено на предоставление гибридного транспортного средства, обеспечивающего возможность выбора состояния движения и ступеней скорости надлежащим образом.
Гибридное транспортное средство настоящего изобретения является гибридным транспортным средством, содержащим: двигатель внутреннего сгорания; электродвигатель; устройство накопления электроэнергии, предоставляющее и принимающее электроэнергию на и от электродвигателя; автоматическую трансмиссию, включающую в себя первый механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения и который подсоединен к электродвигателю, и второй механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, причем движущая выходная мощность из двигателя внутреннего сгорания и электродвигателя изменяется согласно множеству ступеней скорости и выводится; элемент детектирования оставшейся емкости, который детектирует оставшуюся емкость устройства накопления электроэнергии; элемент получения требуемой движущей силы, который получает требуемую движущую силу, которая необходима для выведения; элемент получения требуемой движущей силы электродвигателя, который получает максимальную движущую силу электродвигателя, возможную для вывода, согласно каждой ступени скорости, посредством движущей выходной мощности от электродвигателя; по меньшей мере, принимая во внимание оставшуюся емкость устройства накопления электроэнергии, распознанную элементом детектирования оставшейся емкости; и элемент управления, который определяет наивысшую ступень скорости, на которой электродвигатель способен выводить требуемую движущую силу, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, равна или меньше, чем максимальная движущая сила электродвигателя, полученная элементом получения требуемой движущей силы электродвигателя, управляет автоматической трансмиссией так, что устанавливается определенная ступень скорости, и осуществляет управление с тем, чтобы осуществлять движение транспортного средства только от движущей силы электродвигателя посредством установки первого элемента переключения и второго элемента переключения в разомкнутое состояние.
Согласно гибридному транспортному средству настоящего изобретения, если требуемая движущая сила, полученная элементом получения требуемой движущей силы, является равной или меньшей, чем максимальная движущая сила электродвигателя, полученная элементом получения требуемой движущей силы электродвигателя, транспортное средство осуществляет движение только посредством силы электродвигателя. Поэтому становится возможным уменьшить количество потребления топлива двигателем внутреннего сгорания.
В то же время определяется высшая ступень скорости, способная выводить требуемую движущую силу электродвигателя, и автоматическая трансмиссия управляется так, чтобы установить определенную ступень скорости. Поэтому становится возможным уменьшить скорость вращения вала первого механизма преобразования (первый входной вал), который передает движущую силу от двигателя внутреннего сгорания и подсоединен к электродвигателю и затем становится возможным подавлять вибрацию, которая формируется в момент запуска двигателя внутреннего сгорания установкой первого элемента переключения в соединенное состояние.
Дополнительно в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы первый механизм преобразования включал в себя первый входной вал, который передает движущую силу избирательно через первый элемент переключения и который подсоединен к электродвигателю и первый избирающий элемент, который присоединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, второй механизм преобразования, включающий в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения и второй избирающий элемент, который присоединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и в случае, когда транспортное средство выполнено для движения только движущей силой электродвигателя установлением ступени скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, превышает максимальную движущую силу электродвигателя, полученную элементом получения движущей силы электродвигателя, элемент управления подсоединяет зубчатую передачу к механизму вывода вторым избирающим элементом без установки второго элемента переключения в состояние передачи наряду с сохранением соединенного состояния первым избирающим элементом, запускает двигатель внутреннего сгорания посредством постепенного установления первого элемента переключения в состояние передачи, в дальнейшем создавая воспламенение в двигателе внутреннего сгорания, и осуществляет движение транспортного средства посредством движущей силы двигателя внутреннего сгорания и электродвигателя установкой второго элемента переключения в состояние передачи после завершения запуска двигателя внутреннего сгорания.
В этом случае во время движения транспортного средства только посредством движущей силы электродвигателя, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы превышает максимальную движущую силу электродвигателя, полученную элементом получения движущей силы электродвигателя, двигатель внутреннего сгорания запускается постепенным установлением первого элемента переключения в состояние передачи наряду с поддержанием соединенного состояния посредством первого избирающего элемента. Поэтому становится возможным подавлять замедление, сопровождающее переход ступени скорости при запуске двигателя внутреннего сгорания и сохранять скорость транспортного средства.
В то же время в случае, когда есть зубчатая передача с низшим передаточным отношением, чем зубчатая передача, соединенная посредством первого избирающего элемента, предпочтительно подсоединять зубчатую передачу к механизму вывода вторым избирающим элементом без установки второго элемента переключения в состояние передачи.
Поступая таким образом после запуска двигателя внутреннего сгорания становится возможным быстро переходить к ступени скорости с пониженным передаточным отношением. Дополнительно, когда осуществляется движение транспортного средства движущей силой двигателя внутреннего сгорания и электродвигателя, становится возможным быстро ускорять транспортное средство, поскольку оно переходит на ступень скорости с пониженным передаточным отношением. Дополнительно, когда посредством второго избирающего элемента к выходному валу присоединяется зубчатая передача, движущая сила не передается на механизм вывода через зубчатую передачу, поскольку второй элемент переключения не установлен в состояние передачи.
Предпочтительно завершать запуск двигателя внутреннего сгорания посредством осуществления зажигания двигателя внутреннего сгорания и в дальнейшем установкой первого элемента переключения в разомкнутое состояние. Дополнительно, двигатель внутреннего сгорания может запускаться без изменения ступени скорости.
Механизм вывода является одним подсоединенным к приводному механизму, который двигает ведущие колеса транспортного средства посредством энергии движения, изменяемой автоматической трансмиссией и типично является выходным валом. Это может быть конструкция, в которой механизм вывода выполнен одним выходным валом и выходной вал присоединен к первому входному валу посредством зубчатой передачи, выбранной посредством первого избирающего элемента, и присоединен ко второму входному валу посредством зубчатой передачи, выбранной посредством второго избирающего элемента. Дополнительно, это может быть конструкция, в которой выходной механизм составлен из двух выходных валов, один выходной вал подсоединяется к первому входному валу через зубчатую передачу, выбранную первым избирающим элементом, и другой выходной вал подсоединяется ко второму входному валу через зубчатую передачу, выбранную посредством второго избирающего элемента.
Дополнительно, в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы в случае, когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания и электродвигателя, когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы, становится равной или меньшей, чем максимальная движущая сила электродвигателя, полученная посредством элемента получения движущей силы электродвигателя, управляющий элемент устанавливает первый элемент переключения и второй элемент переключения в разомкнутое состояние и осуществляет движение транспортного средства только движущей силой электродвигателя.
В этом случае во время движения транспортного средства посредством движущей силы двигателя внутреннего сгорания и электродвигателя, когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы становится равной или ниже, чем максимальная движущая сила электродвигателя, полученная элементом получения требуемой движущей силы электродвигателя, транспортное средство совершает движение только посредством силы электродвигателя. Поступая таким образом, становится возможным уменьшать количество потребления топлива двигателем внутреннего сгорания.
Дополнительно, в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы гибридное транспортное средство содержало карту управления скорости, которая выбирает ступень скорости автоматической трансмиссии на основе требуемой движущей силы, полученной элементом получения требуемой движущей силы, и элемент различения зоны, который различает, на основе распознанной оставшейся емкости, распознанной посредством элемента детектирования оставшейся емкости, стандартную зону, зону ограниченного разряда, в которой оставшаяся емкость меньше, чем в стандартной зоной, зону запрещения разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда, и зону запрещения заряда, в которой оставшаяся емкость больше, чем в стандартной зоне, причем первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения и который подсоединен к электродвигателю, и первый избирающий элемент, который присоединяет первый входной вал и выходной механизм через зубчатую передачу, выбранную из множества зубчатых передач, второй механизм преобразования, включающий в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения и второй избирающий элемент, который подсоединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания установкой ступени скорости автоматической трансмиссии в соединенное состояние посредством первого избирающего элемента, в случае изменения в сторону низшей ступени скорости автоматической трансмиссии с учетом карты управления скорости управляющий элемент устанавливает пониженную ступень скорости посредством одной ступени скорости из ступени скорости, посредством установки первого элемента переключения в состояние разомкнутой передачи, и второго избирающего элемента в соединенное состояние, и второго элемента переключения в состояние передачи согласно оцененному значению требуемой движущей силы в случае, когда зона различения посредством элемента различения зоны является стандартной зоной и в дальнейшем электродвигатель осуществляет действие питания/рекуперации посредством либо возврата на ступень скорости, либо установкой первого избирающего элемента в состояние, когда установлена дополнительно пониженная ступень скорости, посредством одной ступени скорости.
В этом случае, когда это является стандартной зоной, в которой разряд и заряд не являются ограниченными, в случае, когда возможно, получать предсказанное значение требуемой движущей силы, тогда становится возможным выбирать подходящую ступень скорости согласно предсказанному значению.
Дополнительно, в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы гибридное транспортное средство содержало карту управления скорости, которая выбирает ступень скорости автоматической трансмиссии на основе требуемой движущей силы, полученной элементом получения требуемой движущей силы и элемента различения зоны, который различает, на основе детектированной оставшейся емкости, детектированной посредством элемента детектирования оставшейся емкости, стандартную зону, зону ограниченного разряда, в которой оставшаяся емкость меньше, чем в стандартной зоне, зону запрещенного разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда, и зону запрещенного заряда, в которой оставшаяся емкость больше, чем в стандартной зоне, в которой первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения и который подсоединен к электродвигателю, и первый избирающий элемент, который присоединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, второй механизм преобразования, включающий в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения и второй избирающий элемент, который присоединяет второй входной вал и механизм вывода через зубчатую передачу, избранную из множества зубчатых передач, и, когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания устанавливаемой ступени скорости автоматической трансмиссии в присоединенное состояние первым избирающим элементом, в случае изменения в сторону низшей ступени скорости автоматической трансмиссии, ссылаясь на карту изменения скорости, управляющий элемент устанавливает ступень скорости в случае, когда зона, различенная посредством элемента различения зоны, является зоной ограниченного разряда.
В этом случае, даже в случае общего смещения в сторону пониженной ступени скорости автоматической трансмиссии наряду со ссылкой на карту изменения скорости, ступень скорости является сохраненной, когда зона находится в зоне ограниченного разряда. Поступая таким образом, становится возможным увеличивать оставшуюся емкость устройства накопления электроэнергии, посредством осуществления выполнения электродвигателем рекуперативного действия, используя часть движущей силы двигателя внутреннего сгорания.
Дополнительно, в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы в случае, когда транспортное средство осуществляет движение посредством установления ступени скорости автоматической трансмиссии в присоединенное состояние посредством первого избирающего элемента, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, является малой и возможно осуществлять движение транспортного средства на пониженной ступени скорости, чем текущая ступень скорости, посредством обращения к карте изменения скорости и скорость потребления топлива хуже, чем предопределенное пороговое значение, если движение совершается на текущей ступени скорости, управляющий элемент подает электричество на устройство накопления электроэнергии посредством рекуперации разницы между требуемой движущей силой и движущей силой двигателя внутреннего сгорания посредством электродвигателя либо одного из первого средства, в котором транспортное средство осуществляет движение установлением ступени скорости автоматической трансмиссии с соединенным состоянием посредством второго избирающего элемента, установкой второго элемента переключения в состояние передачи после установки первого элемента переключения в разомкнутое состояние, и первого входного вала, присоединенного к зубчатой передаче с первым избирающим элементом, или второго средства, в котором зубчатая передача, присоединенная посредством первого избирающего элемента, изменяется на зубчатую передачу с пониженным передаточным отношением.
В этом случае становится возможным предохранять от ухудшения скорости потребления топлива посредством продолжения движения на текущей ступени скорости и дополнительно становится возможным накапливать электричество в устройстве накопления электроэнергии посредством рекуперации разницы между требуемой движущей силой и движущей силой двигателя внутреннего сгорания. Предпочтительно, выбрано ли осуществление первым средством или вторым средством, отдается приоритет накоплению электроэнергии посредством устройства накопления электроэнергии, когда оно находится в зоне ограниченного разряда или зоне запрещенного разряда и отдается приоритет скорости потребления топлива, когда оно находится в стандартной зоне.
В случае осуществления вторым средством предпочтительно, чтобы установка соединенного состояния посредством второго избирающего элемента заканчивалась перед установкой второго элемента переключения в состояние передачи. Поступая таким образом, становится возможным предохранение от передачи водителю толчка от переключения.
Дополнительно, предпочтительно, чтобы, в случае осуществления первым средством, управляющий элемент соединял первый избирающий элемент с первым входным валом и механизмом вывода посредством зубчатой передачи, в которой эффективность величины обеспечения рекуперации максимальная.
В этом случае становится возможным эффективней увеличивать величину накопления электроэнергии в устройстве накопления электроэнергии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет пояснительный вид, показывающий гибридное транспортное средство согласно варианту осуществления настоящего изобретения.
Фиг.2 - пояснительный вид, показывающий зональность устройства накопления электроэнергии.
Фиг.3 - таблица, показывающая разрешение, ограничение, запрещение различной операции согласно зоне устройства накопления электроэнергии.
Фиг.4 - пример карты, показывающий взаимное соотношение между скоростью транспортного средства и движущей силой с верхним ограничением.
Фиг.5 - пример карты, показывающий взаимное соотношение между скоростью транспортного средства и требуемой движущей силой и переключением передачи.
Фиг.6 - временная диаграмма, поясняющая переход от третьей скорости движения EV на вторую скорость движения HEV.
Фиг.7 - блок-схема, показывающая управление движением гибридного транспортного средства.
Фиг.8 - пояснительный вид, показывающий другую автоматическую трансмиссию, которой оборудовано гибридное транспортное средство согласно осуществлению настоящего изобретения.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ссылаясь на чертежи, будет пояснен вариант осуществления гибридного транспортного средства согласно настоящему изобретению.
Гибридное транспортное средство, проиллюстрированное на фиг.1, оборудовано двигателем внутреннего сгорания ENG, электродвигателем MG, устройством BATT накопления электроэнергии, содержащим вторичную аккумуляторную батарею, которая отправляет и принимает электричество на и из электродвигателя MG, автоматическую трансмиссию 1 и устройство ECU управления мощностью (электрический блок управления), который управляет каждой частью автоматической трансмиссии 1 двигателя ENG внутреннего сгорания и электродвигателя MG.
Автоматическая трансмиссия 1 оборудована входным валом 2 двигателя, на который передается движущая мощность (выходной крутящий момент) двигателя ENG внутреннего сгорания, выходным звеном 3, состоящим из выходной шестерни, которая выводит мощность на правое и левое передние колеса как ведущие колеса посредством промежуточной шестерни дифференциала, которая не показана, и множеством зубчатых передач G2 на G5, имеющих различные передаточные отношения.
Дополнительно, автоматическая трансмиссия 1 включает в себя первый входной вал 4, который с возможностью вращения поддерживает ведущие шестерни G3a и G5a нечетных зубчатых передач G3 и G5, которые устанавливают каждые ступени переключения нечетных передач, перечисляемых в ранговом порядке передаточного отношения, второй входной вал 5, который с возможностью вращения поддерживает ведущие шестерни G2a и G4a четных зубчатых передач G2 и G4, которые устанавливают ступени переключения четных передач, перечисляемых в ранговом порядке передаточного отношения, и вал 6 заднего хода, который с возможностью вращения поддерживает шестерню GR заднего хода. Первый входной вал 4 расположен на той же осевой линии с выходным валом 2 двигателя, и второй входной вал 5 и вал 6 заднего хода размещены параллельно первому входному валу 4.
Дополнительно, автоматическая трансмиссия 1 оборудована нейтральной зубчатой передачей Gi, составленной посредством нейтральной ведущей шестерни Gia, и с возможностью вращения поддерживается, посредством первого входного вала 4 первой нейтральной ведущей шестерней Gib, которая прикреплена к нейтральному валу 7 и которая крепится к нейтральной ведущей шестерне Gia, второй нейтральной ведущей шестерней Gic, которая прикреплена ко второму входному валу 5, и третьей нейтральной ведущей шестерней Gid, которая прикреплена к шестерне 6 заднего хода и которая крепится к первой нейтральной ведущей шестерне Gib. Холостой вал 7 размещен параллельно первому входному валу 4.
Автоматическая трансмиссия 1 включает в себя первое сцепление C1 и второе сцепление C2, которое содержит сухое фрикционное сцепление или сцепление, гидроприводного типа, работающее в масляной ванне. Первое сцепление C1 сконфигурировано с возможностью свободно переключаться между состоянием передачи, в котором движущая мощность двигателя ENG внутреннего сгорания передается на выходной вал 2 двигателя, передается на первый входной вал 4, и разомкнутым состоянием (трансмиссия в разомкнутом состоянии), в котором трансмиссия отключена. Второе сцепление C2 сконфигурировано с возможностью свободно переключаться между состоянием передачи, в котором движущая сила ENG двигателя внутреннего сгорания передается на выходной вал 2 двигателя, передается на второй входной вал 5, и разомкнутым состоянием, в котором трансмиссия отключена. Когда состояние передачи установлено посредством включения второго сцепления C2, выходной вал 2 двигателя подсоединен ко второму входному валу 5 через первую нейтральную ведущую шестерню Gib и вторую нейтральную ведущую шестерню Gic.
Предпочтительно, чтобы оба сцепления C1 и C2 приводились в действие посредством электрического исполнительного механизма так, чтобы состояние изменялось быстро. Оба сцепления C1 и C2 могут приводиться в действие исполнительным механизмом гидравлического типа.
Дополнительно, в автоматической трансмиссии 1 механизм PG планетарной шестерни, который является механизмом дифференциального вращения, располагается соосно с выходным валом 2 двигателя. Механизм PG планетарной передачи является механизмом односателлитного типа, состоящим из солнечной шестерни Sa, коронной шестерни Ra и водила Ca, которое с возможностью вращения поддерживает сателлит Pa с зацеплением с солнечной шестерней Sa и коронной шестерней Ra так, чтобы эти шестерни вращались на своих осях и вращались по эпициклической траектории движения.
Если три вращательных элемента, состоящие из солнечной шестерни Sa, водила Ca, и коронной шестерни Ra планетарной зубчатой передачи PG определены как первый вращательный элемент, второй вращательный элемент и третий вращательный элемент со стороны солнечной шестерни Sa, в порядке, в котором они размещены на интервалах, соответствующих передаточным отношениям в диаграмме распределения скоростей (диаграмма возможности или представляющая относительную частоту вращения каждого вращательного элемента с прямыми линиями), тогда первый вращательный элемент соответствует солнечной шестерне Sa, второй вращательный элемент соответствует водилу Ca и третий вращательный элемент соответствует коронной шестерне Ra.
Когда передаточное отношение планетарной зубчатой передачи PG (количество зубцов коронной шестерни Ra/количество зубцов солнечной шестерни Sa) обозначено g, отношение интервала между солнечной шестерней Sa, служащей первым вращательным элементом, и водилом Ca, служащим вторым вращательным элементом, и интервала между водилом Ca, служащим вторым вращательным элементом, и коронной шестерней Ra, служащей третьим вращательным элементом, становится g:1.
Солнечная шестерня Sa, служащая первым вращательным элементом, прикреплена к первому входному валу 4. Водило Ca, служащее вторым вращательным элементом, подсоединено к ведущей шестерне G3a третьей скорости третьей зубчатой передачи G3. Коронная шестерня Ra, служащая третьим вращательным элементом, прикреплена с возможностью расцепления к неподвижной части, такой как корпус трансмиссии, посредством механизма R1 блокировки.
Механизм R1 блокировки сконфигурирован из механизма синхрозацепления, предоставляющего возможность переключаться свободно между соединенным состоянием, в котором коронная шестерня Ra соединена с неподвижной частью и разомкнутым состоянием, в котором коронная шестерня Ra является вращаемой.
Механизм R1 блокировки не ограничен механизмом синхрозацепления и может быть сконфигурирован из механизма выключения фрикционного зацепления, таким как муфта, тормоза, такие как тормоз многодискового типа, работающий в масляной ванне, ступичный тормоз и ленточный тормоз, и тому подобные, муфта свободного хода или двухсторонняя муфта и тому подобное.
Также механизм PG планетарной передачи может быть сконфигурирован двухсателлитного типа, содержащего солнечную шестерню, коронную шестерню и водило, которое с возможностью вращения поддерживает пару сателлитов Pa, Pa', сцепляемых друг с другом и одним сателлитом, сцепляемым с солнечной шестерней Sa и другим сателлитом, сцепляемым с коронной шестерней Ra так, чтобы эти шестерни вращались на своих осях и вращались по эпициклической траектории движения. В этом случае, например, это может быть сконфигурировано так, чтобы солнечная шестерня (первый вращательный элемент) соединялась с первым входным валом 4, коронная шестерня (второй вращательный элемент) соединялась с ведущей шестерней G3a третьей скорости G3 зубчатой передачи третьей скорости и водило (третий вращательный элемент) соединялось с возможностью разъединения с неподвижной частью механизмом R1 блокировки.
Полый электродвигатель MG (двигатель/генератор) размещен на внешней стороне в радиальном направлении механизма PG планетарной передачи. Другими словами, механизм PG планетарной передачи размещен во внутренней стороне полого электродвигателя MG. Электродвигатель MG имеет статор MGa и ротор MGb.
Дополнительно, электродвигатель MG управляется через блок PDU силового привода на основе сигналов устройства ECU управления мощностью. Устройство ECU управления мощностью переключает блок PDU силового привода, как необходимо, между режимом приведения в движение, в котором мощность электроэнергии устройства BATT хранения электроэнергии потребляется для возбуждения электродвигателя MG, и режимом рекуперации, в котором электрическая мощность генерируется наряду со сдерживанием вращающей силы ротора MGb, и вырабатываемая электрическая энергия заряжает устройство BATT накопления электроэнергии через блок PDU силового привода.
Вал 6 заднего хода с возможностью вращения поддерживает шестерню GR заднего хода. Первая ведущая шестерня Go1, которая зацепляется с ведущей шестерней G2a второй скорости и ведущей шестерней G3a третьей скорости, прикреплена к выходному валу 3a (механизма вывода), который поддерживает выходной элемент 3. Дополнительно, вторая ведущая шестерня Go2, которая зацепляется с ведущей шестерней G4a четвертой скорости и ведущей шестерней G5a пятой скорости, прикреплена к выходному валу 3a.
Таким образом, создание ведущей шестерни зубчатой передачи G2 второй скорости и зубчатой передачи G3 третьей скорости и ведущей шестерни зубчатой передачи G4 четвертой скорости и зубчатой передачи G5 пятой скорости посредством одиночной шестерни Go1 и одиночной шестерни Go2, соответственно дает возможность сократить осевую длину автоматической трансмиссии и тем самым улучшить его возможность установки в транспортном средстве FF (переднего привода) типа.
Первый входной вал 4 имеет первый механизм SM1 зацепления, который является первым избирающим элементом, который состоит из механизма синхрозацепления и который предоставляет возможность переключения в одно из состояния соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, состояния соединения к стороне пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 присоединены, и нейтрального состояния, в котором соединение ведущей шестерни G3a третьей скорости и ведущей шестерни G5a пятой скорости к первому входному валу 4 отключено.
Второй входной вал 5 имеет второй механизм SM2 зацепления, который является вторым избирающим элементом, который состоит из механизма синхрозацепления и который предоставляет возможность переключения в одно из состояний соединения к стороне второй скорости, в котором ведущая шестерня G2a второй скорости и второй входной вал 5 соединены, состояния соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены, и нейтрального состояния, в котором соединение ведущей шестерни G2a второй скорости и ведущей шестерни G4a четвертой скорости ко второму входному валу 5 отключено.
Вал 6 заднего хода имеет третий механизм SM3 зацепления, который состоит из механизма синхрозацепления и который предоставляет возможность переключения в одно из состояния соединения, в котором шестерня GR заднего хода и вал 6 заднего хода соединены, и нейтрального состояния, в котором их соединение отключено.
Далее, будет пояснена работа автоматической трансмиссии 1, сконфигурированной как упомянуто выше.
Автоматическая трансмиссия 1 предоставляет возможность осуществления запуска IMA запуска двигателя ENG внутреннего сгорания, использующего движущую силу электродвигателя MG посредством зацепления первым сцеплением C1.
В случае установления первой ступени скорости посредством использования движущей силы двигателя ENG внутреннего сгорания коронная шестерня Ra механизма PG планетарной передачи установлена в состояние соединения посредством механизма R1 блокировки и первого сцепления C1, включенного в состояние передачи.
Движущая сила двигателя ENG внутреннего сгорания выводится на солнечную шестерню Sa механизма PG планетарной передачи через выходной вал 2 двигателя, первое сцепление C1 и первый входной вал 4. Скорость вращения двигателя ENG внутреннего сгорания, выведенная на выходной вал 2 двигателя, снижена в 1/(g+1) и сниженная скорость вращения передается на ведущую шестерню G3a третьей скорости через водило Ca.
Отмечая передаточное отношение зубчатой передачи G3 третьей скорости, состоящей из ведущей шестерни G3a третьей скорости и первой ведущей шестерни Go1 (количество зубцов ведущей шестерни G3a третьей скорости/количество зубцов ведущей шестерни Go1 первой скорости) как i, движущая сила, переданная на ведущую шестерню G3a третьей скорости, переключается в 1/i(g+1) и затем выводится из выходного звена 3 через первую ведущую шестерню Go1 и выходной вал 3a, соответственно устанавливая первую ступень скорости. Поступая таким образом, становится возможным осуществлять перемещение ENG от перемещения только движущей силой двигателя внутреннего сгорания ENG.
Как пояснено выше, автоматическая трансмиссия 1 предоставляет возможность установления первой ступени скорости с механизмом PG планетарной передачи и зубчатой передачей третьей скорости, специальный механизм зацепления для первой ступени скорости не нужен, так что становится возможно сократить осевую длину автоматической трансмиссии 1.
Первый механизм преобразования является механизмом, который передает движущую силу двигателя ENG внутреннего сгорания избирательно через первое сцепление C1, подсоединенное к электродвигателю MG, который выводит движущую силу от них обоих после изменения скорости на выходном валу 3a и который сконфигурирован из первого входного вала 4, первого механизма SM1 зацепления, механизма PG планетарной передачи и тому подобных. Второй механизм преобразования является механизмом, который передает движущую силу двигателя ENG внутреннего сгорания избирательно через второе сцепление C2, которое выводит движущую силу после изменения скорости на выходном валу 3a и который сконфигурирован из второго входного вала 5, второго механизма SM2 зацепления, механизма PG планетарной передачи и тому подобных.
На первой ступени скорости, когда транспортное средство находится в состоянии замедления согласно оставшейся емкости (скорости заряда) SOC устройства BATT накопления электроэнергии, устройство ECU управления мощностью осуществляет действие замедления рекуперации осуществлением выработки электроэнергии посредством торможения электродвигателем MG. Дополнительно, согласно оставшейся емкости SOC устройства BATT накопления электроэнергии становится возможным возбуждать электродвигатель MG и осуществлять движение HEV (Гибридное транспортное средство), которое обеспечивает движущую силу двигателя ENG внутреннего сгорания, или движение EV (электротранспортного средства), которое перемещается только движущей силой электродвигателя MG.
Дополнительно, в случае, когда замедление транспортного средства доступно во время движения EV и скорость транспортного средства является предопределенной скоростью или больше, это делает возможным запуск двигателя ENG внутреннего сгорания, используя кинетическую энергию транспортного средства посредством постепенного включения первым сцеплением C1, без использования движущей силы электродвигателя MG.
Если устройство ECU управления мощностью предсказывает, наряду с движением на первой ступени скорости, что первая ступень скорости будет переключена вверх на вторую ступень скорости на основе информации транспортного средства, такой как скорость транспортного средства и открывание дросселя педалью акселератора, тогда устройство ECU управления мощностью устанавливает второй механизм SM2 зацепления в состояние соединения со стороной второй скорости, в котором вторая ведущая шестерня G2a и второй входной вал 5 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Чтобы установить вторую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, второй механизм SM2 зацепления устанавливает состояние соединения со стороной второй скорости, в котором ведущая шестерня G2a второй скорости присоединена ко второму входному валу 5 и тогда второе сцепление C2 включается в состояние передачи. Поступая таким образом, движущая сила двигателя ENG внутреннего сгорания выводится от выходного элемента 3 через второе сцепление C2, нейтральную зубчатую передачу Gi, второй входной вал 5, зубчатую передачу G2 второй скорости и выходной вал 3a.
Если устройство ECU управления мощностью предсказывает наряду с движением на второй ступени скорости, что вторая ступень скорости будет переключена вверх, тогда устройство ECU управления мощностью устанавливает первый зацепляющий механизм SM1 в состояние соединения со стороной третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 присоединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Напротив, если устройство ECU управления мощностью предсказывает переключение вниз, первый механизм SM1 зацепления устанавливается в нейтральное состояние, в котором подсоединение ведущей шестерни G3a третьей скорости и ведущей шестерни G5a пятой скорости к первому входному валу 4 разомкнуто.
Поступая таким образом, становится возможным осуществлять переключение вверх или переключение вниз посредством установки первого сцепления C1 в состояние передачи и установки второго сцепления C2 в разомкнутое состояние так, чтобы переключение ступени скорости могло осуществляться равномерно без прерывания движущей силы.
Дополнительно, также во второй ступени скорости в случае, когда транспортное средство находится в состоянии замедления, устройство ECU управления мощностью осуществляет работу замедления рекуперации согласно оставшейся емкости SOC устройства BATT накопления электроэнергии. В случае осуществления действия замедления рекуперации на второй ступени скорости он отличает, находится ли первый механизм SM1 зацепления в состоянии соединения к стороне третьей скорости или нейтральном состоянии.
В случае когда первый механизм SM1 зацепления находится в состоянии соединения к стороне третьей скорости, третья ведущая шестерня G3a, которая вращается посредством первой ведущей шестерни Go1, вращается посредством второй ведущей шестерни G2a, вращает ротор MGb электродвигателя MG через первый входной вал 4. Поэтому рекуперация осуществляется посредством подавления вращения ротора MGb и торможения так, чтобы генерировать мощность.
В случае когда первый механизм SM1 зацепления находится в нейтральном состоянии, рекуперация осуществляется посредством установления скорости вращения коронной шестерни Ra в 0 посредством установки механизма R1 блокировки в состояние соединения и посредством торможения скорости вращения водила Ca, вращающегося вместе с ведущей шестерней G3a третьей скорости, зацепленной с первой ведущей шестерней Go1, выполняя соединение электродвигателя MG с солнечной шестерней Sa для выработки мощности.
Дополнительно, в случае осуществления движения HEV на второй ступени скорости, например, это может осуществляться посредством установления первого механизма SM1 зацепления в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, и установлением механизма PG планетарной передачи в заблокированное состояние, в котором вращательный элемент не может вращаться относительно, и посредством передачи движущей силы электродвигателя MG на выходное звено 3 через зубчатую передачу G3 третьей скорости. Дополнительно, движение HEV на второй ступени скорости возможно посредством установки скорости вращения коронной шестерни Ra в 0 посредством установки первого механизма SM1 зацепления в нейтральное состояние и механизма R1 блокировки в состояние соединения и посредством передачи движущей силы электродвигателя MG на первую ведущую шестерню Go1 через тракт первой ступени скорости.
Чтобы установить третью ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены и первое сцепление C1 включается в состояние передачи. Поступая таким образом, движущая сила двигателя ENG внутреннего сгорания передается на выходной элемент 3 при посредничестве выходного вала 2 двигателя, первого сцепления C1, первого входного вала 4, первого механизма SM1 зацепления и зубчатой передачи G3 третьей скорости и затем выводится на скорости вращения 1/i.
На ступени третьей скорости первый механизм SM1 зацепления в состоянии соединения к стороне третьей скорости, когда ведущая шестерня G3a третьей скорости и первый входной вал 4 присоединены так, чтобы солнечная шестерня Sa и водило Ca механизма PG планетарной передачи совместно находились в одном и том же вращении.
Следовательно, каждый вращательный элемент механизма PG планетарной передачи находится в заблокированном состоянии, в котором они не могут вращаться относительно, так чтобы замедление рекуперации реализовалось посредством использования электродвигателя MG для применения тормозов к солнечной шестерне Sa и передачи движущей силы на солнечную шестерню Sa посредством электродвигателя, MG предоставляет возможность осуществления движения HEV. Дополнительно, возможно осуществлять движение EV, передвигаясь только движущей силой электродвигателя MG посредством разблокировки первого сцепления C1.
На ступени третьей скорости, если устройство ECU управления мощностью предсказывает переключение вниз на основании информации транспортного средства, такой как скорость транспортного средства или степень открывания дросселя педалью акселератора, тогда второй механизм SM2 зацепления устанавливается в состояние соединения к стороне второй скорости, в котором ведущая шестерня G2a второй скорости и второй входной вал 5 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию. Если предсказано переключение вверх, тогда второй механизм SM2 зацепления устанавливается в состоянии соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Поступая таким образом, становится возможным осуществлять переключение ступени скорости посредством включения второго сцепления C2 в состояние передачи и разблокировкой первого сцепления C1 в разомкнутое состояние, так чтобы изменение скорости могло осуществляться равномерно без прерывания движущей силы.
Чтобы установить четвертую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, второй механизм SM2 зацепления устанавливается в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены и второе сцепление C2 зацепляется в состояние передачи.
Во время движения в четвертой ступени скорости, если устройство ECU управления мощностью предсказывает переключение вниз на основании информации транспортного средства, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в которой ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Напротив, если устройство ECU управления мощностью предсказывает переключение вверх на основании информации транспортного средства, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Поступая таким образом, становится возможным выполнять переключение вниз или переключение вверх просто посредством включения первого C1 сцепления в состояние передачи и разблокировкой второго сцепления C2 в разомкнутое состояние, так чтобы изменение скорости могло осуществляться равномерно без прерывания движущей силы.
В случае осуществления замедления рекуперации или движения HEV во время перемещения на четвертой ступени скорости, если устройство ECU управления мощностью предсказывает переключение вниз, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены. Замедление рекуперации может осуществляться применением тормоза электродвигателем MG, и движение HEV может осуществляться посредством передачи движущей силы.
Если устройство ECU управления мощностью предсказывает переключение вверх, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в которой ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены. Замедление рекуперации может осуществляться применением торможения посредством электродвигателя MG, и движение HEV может осуществляться посредством передачи движущей силы от электродвигателя MG.
Чтобы установить пятую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в которой ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены. На ступени пятой скорости двигатель ENG внутреннего сгорания и электродвигатель MG непосредственно соединены, когда первое сцепление C1 установлено в состояние передачи, так чтобы движение HEV могло осуществляться посредством вывода движущей силы из электродвигателя MG, и замедляющая рекуперация может осуществляться посредством применения торможения электродвигателем MG и выработки энергии.
В случае осуществления движения EV на ступени пятой скорости первое сцепление C1 устанавливается в разомкнутое состояние. Также, во время движения EV на ступени пятой скорости, двигатель внутреннего сгорания ENG может запускаться посредством постепенного включения первого сцепления C1.
Во время движения на ступени пятой скорости, если устройство ECU управления мощностью предсказывает переключение вниз на ступень четвертой скорости из информации транспортного средства, тогда второй механизм SM2 зацепления устанавливается в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию. Поступая таким образом переключение вниз на ступень четвертой скорости может осуществляться равномерно без прерывания движущей силы.
Чтобы установить обратную ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, третий механизм SM3 зацепления устанавливается в соединенное состояние, в котором шестерня GR заднего хода и вал 6 заднего хода соединены, и тогда второе сцепление C2 включается в состояние передачи. Это изменяет скорость вращения выходного вала 2 двигателя на отрицательное вращение (вращение в обратном направлении), и скорость вращения выводится из выходного элемента 3, тем самым устанавливая обратную ступень.
Для выполнения замедляющей рекуперации или движения HEV на обратной ступени первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, и механизм PG планетарной передачи устанавливается в заблокированное состояние, в котором вращательные элементы не могут вращаться относительно. Тогда побуждение ротора MGb вращаться в обратном направлении для вырабатывания движущей силы на стороне прямого вращения и применяя тормоза реализует замедляющую рекуперацию, в то время как побуждение ротора MGb вырабатывать движущую силу на стороне обратного вращения реализует движение HEV.
Дополнительно, движение EV на обратной ступени может устанавливаться установкой обоих сцеплений C1 и C2 в разомкнутое состояние и механизма R1 блокировки в закрепленное состояние и реверсированием электродвигателя MG.
Дополнительно, транспортное средство оборудовано датчиком 11 наклона, который детектирует наклон D дороги, с которой соприкасается транспортное средство, датчиком 12 скорости транспортного средства, который измеряет скорость движения транспортного средства (скорость транспортного средства) S, датчиком 13 нажатия педали акселератора, датчиком 14 нажатия педали тормоза, который детектирует величину действия (величину нажатия ногой) педали тормоза, датчиком 15 температуры, который детектирует температуру электродвигателя MG, устройством BATT накопления электроэнергии и инвертором, не показан, внутри блока PDU силового привода и системой 16 навигации, которая получает информацию о местности, окружающей место движения транспортного средства. Детектированные сигналы от каждого из датчиков 11-15 и информация, полученная навигационной системой 16, вводится в устройство ECU управления мощностью.
Дополнительно, устройство ECU управления мощностью оборудовано элементом 21 различения зоны, элементом 22 получения требуемой движущей силы, элементом 23 получения движущей силы электродвигателя и элементом 24 определения ступени скорости. Элемент 21 различения зоны соответствует элементу детектирования оставшейся емкости настоящего изобретения.
Элемент 21 различения зоны детектирует оставшуюся емкость SOC устройства BATT накопления электроэнергии и различает область (зону) на основании детектированной оставшейся емкости SOC. Как показано на фиг.2, элемент 21 различения зоны осуществляет различение зоны посредством добавления наклона D распознанного посредством датчика наклона к оставшейся емкости SOC.
Пороговое значение оставшейся емкости SOC каждой области устанавливается так, чтобы пороговое значение было постоянно, пока наклон D достигает предопределенного наклона Da, большего чем угол 0 градусов, и так, чтобы пороговое значение становилось больше, когда наклон D становится больше, когда наклон D является большим, чем наклон Da.
Однако наклон Da не ограничивается наклоном, большим чем 0 градусов, и может быть различным для каждого порогового значения каждой области. Также, скорость увеличения наклона порогового значения посредством наклона D, большего чем наклон Da, может не быть постоянной и может быть различной для каждого порогового значения каждой области. Пороговое значение каждой области может устанавливаться посредством добавления других элементов, таких как температура устройства BATT накопления электроэнергии. Дополнительно, пороговое значение каждой области может быть постоянным независимо от наклона D.
Конкретно, зона классифицируется на зону А, которая является обычно используемой зоной и которая становится стандартной зоной, зону В, которая имеет меньшую оставшуюся емкость SOC, чем зона А, и которая является зоной ограниченного разряда, в которой разряд ограничен, зону С, которая имеет меньшую оставшуюся емкость SOC, чем зона В, и зону запрещенного разряда, в которой разряд запрещен, и зону D, которая имеет большую оставшуюся емкость SOC, чем в зоне А, и является зоной ограниченного заряда, в которой заряд ограничен. Зона А дополнительно классифицируется на промежуточную М зоны А, в которой оставшаяся емкость SOC оптимальна, L зоны A которая имеет меньшую оставшуюся емкость SOC, чем M зоны A и H зоны A, которая имеет большую оставшуюся емкость SOC, чем М зоны А.
Устройство ECU управления мощностью управляет двигателем ENG внутреннего сгорания, электродвигателем MG и автоматической трансмиссией 1 на основе области (зоны) различенной элементом 21 различения зоны. Как показано на фиг.3, устройство ECU управления мощностью разрешает, ограничивает и запрещает различные операции на основе области.
Элемент 22 получения требуемой движущей силы получает требуемую движущую силу Tq, то есть необходимую, которая должна выводиться выходным валом 3a из скорости S транспортного средства, распознанной датчиком 12 скорости транспортного средства, величины нажатия педали акселератора, детектированной датчиком 13 педали акселератора и величины нажатия педали тормоза, детектированной датчиком 14 педали тормоза. Элемент 22 получения требуемой движущей силы получает требуемую движущую силу Tq, используя отображение, сохраненное в ПЗУ, не показано, внутри устройства ECU управления мощностью или тому подобное или вычисления уравнения и тому подобное.
Элемент 23 получения движущей силы электродвигателя получает максимальную движущую силу Tm электродвигателя, которая является большей среди движущей силы Tm электродвигателя способной к выводу на выходной вал 3a, согласно каждой ступени скорости, посредством вывода мощности из электродвигателя MG, принимая во внимание зону, различенную элементом 21 различения зоны, согласно скорости S транспортного средства, детектированной датчиком 12 скорости транспортного средства.
В случае когда зона, различенная элементом 21 различения зоны, равна или больше чем М зоны А, элемент 23 получения движущей силы электродвигателя первый получает движущую силу Tm электродвигателя, способную выводиться на выходной вал 3a согласно каждой ступени скорости ступени первой скорости, ступени третьей скорости и ступени пятой скорости посредством движущей силы, выводимой из электродвигателя MG, согласно скорости S транспортного средства, детектированной датчиком 12 скорости транспортного средства.
В материалах настоящей заявки элемент 23 получения движущей силы электродвигателя получает движущую силу Tm электродвигателя посредством обращения к карте М1, показанной на фиг.4, которая сохраняется в ПЗУ или тому подобном, не показано, внутри устройства ECU управления мощностью. На карте M1, верхнее ограничение движущей силы Tm электродвигателя, выводимой из электродвигателя MG, согласно каждой ступени скорости, ступени первой скорости, ступени третьей скорости и ступени пятой скорости, соответственно скорости S транспортного средства, показанной изогнутыми линиями, указывается 1E, 3E, и 5E соответственно.
После этого в случае, когда есть множество ограниченных сверху движущих сил Tm электродвигателя, соответствующих скорости S транспортного средства, элемент 23 получения движущей силы электродвигателя получает большую движущую силу Tm электродвигателя как максимальную движущую силу Tm электродвигателя и в случае, когда есть только одно верхнее ограничение движущей силы Tm электродвигателя, соответствующее скорости S транспортного средства, элемент 23 получения движущей силы электродвигателя получает эту движущую силу Tm электродвигателя как максимальную движущую силу Tm электродвигателя.
Также в случае, когда зона, различенная элементом 21 различения зоны является L зоны А, элемент 23 получения движущей силы электродвигателя получает максимальную движущую силу Tm электродвигателя, которая становится большей среди ограниченных сверху движущих сил Tm электродвигателя, способных запускать двигатель ENG внутреннего сгорания, согласно каждой ступени скорости (первой ступени скорости, второй ступени скорости, третьей ступени скорости, четвертой ступени скорости, пятой ступени скорости) выхода мощности из электродвигателя MG, согласно скорости S транспортного средства, детектированной датчиком 12 скорости транспортного средства.
Это обусловлено тем, что в L зоны А, как показано на фиг.3, движение EV ограничено так, чтобы был необходим запуск двигателя ENG внутреннего сгорания при переключении из движения EV в движение ENG в случае, когда оставшаяся емкость SOC устройства BATT накопления электроэнергии уменьшается и передается в зону В.
В материалах настоящей заявки элемент 23 получения движущей силы электродвигателя получает движущую силу Tm электродвигателя посредством обращения к карте М1. На карте M1 верхнее ограничение движущей силы Tm электродвигателя, способной запускать двигатель ENG внутреннего сгорания согласно каждой ступени скорости первой ступени скорости на пятую ступень скорости посредством электродвигателя MG согласно скорости S транспортного средства, показано штрихпунктирными изогнутыми линиями с двумя точками 1M', 2M', 3M', 4M', и 5M' соответственно.
После этого в случае, когда есть множество движущих сил Tm электродвигателя верхнего ограничения, соответствующих скорости S транспортного средства, элемент 23 получения движущей силы электродвигателя получает большую движущую силу Tm электродвигателя как максимальную движущую силу Tm электродвигателя, и в случае, когда есть только одно верхнее ограничение движущей силы Tm электродвигателя, соответствующее скорости S транспортного средства, тогда элемент 23 получения движущей силы электродвигателя получает эту ограниченную сверху движущую силу Tm электродвигателя как максимальную движущую силу Tm электродвигателя.
Также, в случае когда зона, различенная элементом 21 различения зоны является зоной В или зоной С, элемент 23 получения движущей силы электродвигателя получает 0 как максимальную движущую силу Tm электродвигателя. Это обусловлено тем, что в зоне В и зоне С движение EV запрещено, как показано на фиг.3
Элемент 24 определения ступени скорости определяет состояние движения транспортного средства (является ли оно движением ENG, движением EV, движением HEV) и ступень скорости автоматической трансмиссии 1, обращаясь к отображению M2, показанному на фиг.5. На карте M2 граница области способности движения EV для каждой ступени скорости первой ступени скорости, третьей ступени скорости и пятой ступени скорости согласно скорости S транспортного средства и требуемой движущей силе Tq является установленной изогнутыми линиями указанными 1E, 3E, и 5E соответственно. Нижняя левая сторона на фиг.5 из этих кривых (сторона происхождения 0) - область способности движения EV и верхняя правая сторона на фиг.5 - область неспособности движения EV.
Поступая таким образом, если точка определенная скоростью транспортного средства распознана посредством датчика 12 скорости транспортного средства и требуемая движущая сила Tq, полученная элементом 22 получения требуемой движущей силы согласно изменению в состоянии действия транспортного средства существует в области способности движения EV, в основном определяется как движение EV. Однако в случае, когда зона, различенная элементом 21 различения зоны, является зоной В или зоной С, это определяется как движение ENG, потому что движение EV невозможно со ссылкой на фиг.3. Дополнительно, в случае, когда зона, различенная элементом 21 различения зоны, является L зоны А или зоны В, это определяется как движение ENG. В случае зоны В, согласно ситуации, это может быть определено как движение HEV.
С другой стороны, если точка, определенная скоростью S транспортного средства и требуемая движущая сила Tq находятся в пределах области неспособности движения EV, тогда это определяется как движение ENG или движение HEV. После этого, в случае, когда зона, различенная элементом 21 различения зоны, является равной или большей, чем М зоны А, это определяется как движение HEV, поскольку содействие электродвигателя MG осуществляется активным, со ссылкой на фиг.3. В случае когда зона, различенная элементом 21 различения зоны, является L зоны А или зоной В, требуемая движущая сила Tq определяется как движение ENG или движение HEV, поскольку содействие электродвигателя MG осуществляется неактивно, со ссылкой к фиг.3. Определение движения ENG или движения HEV будет пояснено позже. С другой стороны, в случае, когда зона, различенная элементом 21 различения зоны, является зоной С, это определяется как движение ENG, поскольку движение EV является невозможным, со ссылкой на фиг.3.
Вариограмма устанавливается на карте M2. Вариограмма содержит общее из четырех линий переключения вверх, а именно: линии переключения вверх с первой скорости на вторую скорость (1→2), линии переключения вверх со второй скорости на третью скорость (2→3), линии переключения вверх с третьей скорости на четвертую скорость (3→4), и линии переключения вверх с четвертой скорости на пятую скорость (4→5) и общее из четырех линий переключения вниз, а именно: линию переключения вниз со второй скорости на первую скорость (2→1), линии переключения вниз с третьей скорости на вторую скорость (3→2), линии переключения вниз с четвертой скорости на третью скорость (4→3) и линии переключения вниз с пятой скорости на четвертую скорость (5→4).
Поступая таким образом, например, когда точка, определенная скоростью S транспортного средства, детектированная датчиком 12 скорости транспортного средства и требуемая движущая сила Tq, полученная элементом 22 получения требуемой движущей силы пересекает линию переключения вверх со второй скорости на третью скорость (2→3) с правой стороны на левую сторону на фиг.5, изменением состояния действия транспортного средства, в основном элемент 24 определения ступени скорости переключает вверх ступень скорости со второй ступени скорости на третью ступень скорости. Также, когда точка, определенная скоростью S транспортного средства и требуемая движущая сила Tq пересекает линию переключения вниз с третьей скорости на вторую скорость (3→2) с левой стороны на правую сторону на фиг.5 изменением состояния действия транспортного средства, в основном элемент 24 определения ступени скорости, переключает вниз ступень скорости с третьей ступени скорости на вторую ступень скорости.
С другой стороны, когда точка пересекает линию переключения вверх со второй скорости на третью скорость (2→3) с правой стороны на левую сторону, фиг.5, в основном элемент 24 определения ступени скорости переключает вверх ступень скорости со второй ступени скорости на третью ступень скорости. Также, когда точка, определенная скоростью S транспортного средства и требуемая движущая сила Tq пересекает линию переключения вниз с третьей скорости на вторую скорость (3→2) с левой стороны на правую сторону на фиг.5, изменением состояния действия транспортного средства, в основном элемент 24 определения ступени скорости переключает вниз ступень скорости с третьей ступени скорости на вторую ступень скорости.
Вариограмма, установленная на карте M2, корректируется согласно зоне, различенной элементом 21 различения зоны, температуры, распознанной датчиком 15 температуры, информации о местности, полученной системой 16 навигации, и тому подобного. Например, в случае, когда зона, различенная элементом 21 различения зоны, является равной или больше чем М зоны А, каждая линия переключения вниз корректируется таким образом, чтобы смещаться вверх, таким образом активно осуществляя содействие электродвигателем MG, со ссылкой на фиг.3. Однако когда температура, распознанная датчиком 15 температуры, является равной или выше, чем предопределенное пороговое значение, каждая линия переключения вниз не корректируется для смещения вверх, даже в случае, когда зона, различенная элементом 21 различения зоны, является равной или большей, чем М зоны А, таким образом, электродвигатель MG действует неактивно.
Также, в случае, когда определяется по информации о местности, полученной системой 16 навигации, что транспортное средство двигается по горной местности, верхнее ограничение движущей силы, способной вырабатываться двигателем внутреннего сгорания ENG, возрастает. Поэтому каждая линия переключения вниз корректируется, таким образом, для смещения вниз согласно высоте. Также, в случае, когда определяется по информации о местности, полученной системой 16 навигации, что транспортное средство приближается к поднимающейся дороге, предсказывается, что требуемая движущая сила Tq будет возрастать. Поэтому каждая линия переключения вниз корректируется таким образом для смещения вниз согласно наклону поднимающейся дороги.
На карте M1 ограниченная сверху движущая сила T, способная выводиться на выходной вал 3a согласно каждой ступени скорости с первой ступени скорости по пятую ступень скорости движения HEV, согласно скорости S транспортного средства, показана изогнутыми линиями, указанными 1EM, 2EM, 3EM, 4EM и 5EM соответственно. Дополнительно, на карте M1 ограниченная сверху движущая сила T, способная выводиться на выходной вал 3a согласно каждой ступени скорости с первой ступени скорости по пятую ступень скорости движения ENG, согласно скорости S транспортного средства, показана изогнутыми линиями, указанными 1E, 2E, 3E, 4E и 5E соответственно.
На карте M2 вариограмма установлена так, чтобы движущая сила Т, соответствующая скорости S транспортного средства, на карте M1, становилась ступенью скорости, превышающей требуемую движущую силу Tq. В случае когда есть множество ступеней скорости, на которых движущая сила Т превышает требуемую движущую силу Tq, соответствующую скорости S транспортного средства, как правило выбирается большая ступень скорости. Однако в случае, когда требуемая движущая сила Tq, соответствующая скорости S транспортного средства, превышает все движущие силы Т каждой ступени скорости движения ENG, тогда ступень скорости определяется, ссылаясь на карту М, посредством движения HEV.
В случае когда зона, различенная элементом 21 различения зоны, является А зона L или зона В, элемент 24 определения ступени скорости в основном определяет, что должно быть движение ENG. Однако в случае, когда требуемая движущая сила Tq во время движения ENG превышает ограниченную сверху движущую силу T, тогда определяется движение HEV, в котором содействие осуществляется электродвигателем MG для величины превышения.
Устройство ECU управления мощностью принимает решение элемента 24 определения ступени скорости и управляет каждым блоком, как показано на фиг.6. В случае когда транспортное средство осуществляет движение EV на третьей ступени скорости, когда элемент 24 определения ступени скорости осуществляет определение, первое сцепление C1 постепенно включается после установки второго зацепляющего механизма SM2 в состояние соединения к стороне второй скорости для установки автоматической трансмиссии 1 в состояние предпереключения второй скорости. В это время движущая сила, передающаяся на выходной вал 3a, уменьшается от трения первого сцепления C1, так чтобы движущая сила электродвигателя MG увеличивалась так, чтобы компенсировать уменьшение.
В это время, поскольку ступень скорости автоматической трансмиссии 1 не изменялась, становится возможным ограничивать замедление, сопровождающее изменение скорости во время запуска двигателя внутреннего сгорания ENG и поддерживать скорость транспортного средства. Дополнительно, автоматическая трансмиссия 1 находится в состоянии предпереключения на вторую скорость, которое может легко переключаться на вторую ступень скорости, так что становится возможным быстрый переход на вторую ступень скорости после запуска двигателя ENG внутреннего сгорания.
После этого, когда скорость Ne вращения выходного вала 2 двигателя достигает скорости N1 вращения при запуске, когда скорость вращения способна запустить двигатель ENG внутреннего сгорания, свеча зажигания (не показана) зажигается и двигатель ENG внутреннего сгорания выполнен для осуществления зажигания. После подтверждения зажигания первое сцепление C1 устанавливается в разомкнутое состояние.
После этого второе сцепление C2 постепенно включается после установки первого зацепляющего механизма SM1 в нейтральное состояние и в состояние второй скорости. После того как скорость вращения выходного вала 2 двигателя достигает целевой частоты N2 вращения и запуск двигателя ENG внутреннего сгорания завершен, второе сцепление C2 включается в состояние передачи. После этого транспортное средство выполняет движение наряду с электродвигателем MG, выполняющим подачу питания/рекуперацию, согласно разнице между движущей силой двигателя ENG внутреннего сгорания и требуемой движущей силой Tq. В это время становится возможным быстро ускорять транспортное средство, потому что ступень скорости перешла на вторую ступень скорости, которая имеет пониженное передаточное число, чем ступень скорости во время движения EV.
Затем управление гибридным транспортным средством будет пояснено со ссылкой на фиг.7. Последовательность операций исполняется устройством ECU управления мощностью, соответствующим элементу управления настоящего изобретения.
Во-первых, определяется, является или нет зона, различенная элементом 21 различения зоны, равной или большей, чем L зоны A (этап 1). В случае когда различенная зона является меньшей, чем L зоны А, то есть зоной B или зоной С (этап 1: НЕТ), тогда движение осуществляется на ступени скорости, определенной посредством элемента 24 определения ступени скорости (этап 2).
С другой стороны, в случае, когда зона различения равна или больше, чем L зоны A (этап 1: ДА), тогда определяется, является ли возможным движение EV или нет (этап 3). Является ли возможным движение EV или нет, определяется согласно тому, находится ли точка, определенная посредством скорости S транспортного средства, детектированной посредством датчика 12 скорости транспортного средства и требуемая движущая сила Tq, полученная посредством элемента 22 получения требуемой движущей силы на карте M2 в пределах области возможного движения EV.
В случае когда требуемая движущая сила Tq равна или меньше чем максимальная движущая сила электродвигателя Tm (этап 3: ДА), тогда движение EV осуществляется на ступени скорости, определенной посредством элемента 24 определения ступени скорости (этап 4).
С другой стороны, в случае когда требуемая движущая сила Tq превышает максимальную движущую силу электродвигателя Tm (этап 3: НЕТ), тогда движение HEV осуществляется на ступени скорости, определенной посредством элемента 24 определения ступени скорости (этап 5).
Как пояснено выше, в случае когда зона различения равна или больше, чем L зоны A (этап 1: ДА), если требуемая движущая сила Tq равна или меньше, чем максимальная движущая сила электродвигателя Tm (этап 3: ДА), осуществляется движение EV (этап 4). Поэтому становится возможным уменьшить количество потребления топлива двигателем ENG внутреннего сгорания.
В это время автоматическая трансмиссия 1 устанавливается на повышенную ступень скорости, при которой требуемая движущая сила Tq может выводиться посредством электродвигателя MG. Поэтому становится возможным уменьшить частоту вращения первого входного вала 4 и после этого становится возможным ограничить вибрацию, формируемую в опоре двигателя, когда первое сцепление C1 устанавливается в состояние передачи и запускается двигатель ENG внутреннего сгорания.
Также в случае, когда зона различения равна или больше, чем L зоны A (этап 1: ДА), когда требуемая движущая сила Tq становится равной или меньшей, чем максимальная движущая сила электродвигателя Tm во время движения HEV (этап 3: ДА), тогда осуществляется движение EV (этап 4). Поэтому становится возможным уменьшить количество потребления топлива двигателем ENG внутреннего сгорания.
Также при переключении вниз наряду со ссылкой на карту M2 во время движения ENG или движения HEV на ступени третьей скорости или пятой ступени скорости, в случае, когда зона, различенная элементом 21 различения зоны, является М зоны А или Н зоны А, электродвигатель MG осуществляет действие рекуперации посредством сохранения текущей ступени скорости или действие после установления пониженной ступени скорости посредством одной ступени скорости, первое сцепление C1 в состоянии установления ступени скорости дополнительно понижено посредством одной ступени скорости согласно предсказанному значению требуемой движущей силы Tq.
Конкретно, например, при переключении вниз, наряду со ссылкой на карту M2 во время движения ENG на третьей ступени скорости, в случае, когда зона, распознанная элементом 21 различения зоны М зоны А или Н зоны А, в случае, когда предсказано уменьшение требуемой движущей силы Tq, транспортное средство осуществляет движение ENG наряду с поддержанием текущей ступени третьей скорости. С другой стороны, в случае, когда увеличение требуемой движущей силы Tq является предсказуемым, электродвигатель MG осуществляет действие рекуперации первым осуществлением движения ENG на ступени второй скорости, установкой первого сцепления C1 в разомкнутое состояние, а также установкой второго механизма SM2 зацепления в состояние соединения к стороне второй скорости и установкой второго сцепления C2 в разомкнутое состояние и после этого незамедлительной установки первого механизма SM1 зацепления в нейтральное состояние и состояние предпереключения вниз.
Поступая таким образом, становится возможным избирать подходящую ступень скорости в случае, когда увеличение или уменьшение требуемой движущей силы Tq является предсказуемым. Увеличение или уменьшение требуемой движущей силы Tq является предсказанным, например, согласно информации о местности, полученной системой 16 навигации и тому подобным.
Также даже при переключении вниз со ссылкой на карту M2 во время движения ENG или движения HEV на ступени третьей скорости или ступени пятой скорости текущая ступень скорости сохраняется в случае, когда зона, различенная элементом 21 различения зоны, является L зоны А или зоны В.
В случае L зоны A или зоны В обычно движение HEV не осуществляется, со ссылкой на фиг.3. Однако, для того чтобы предотвратить разницу от переключения часто осуществляемого по намерению водителя, имеются случаи, когда ступень скорости сохраняется и движение ENG переключается в движение HEV, даже когда оставшаяся емкость SOC падает до L зоны А или зоны В, пока датчик 13 нажатия педали акселератора детектирует нажатие на педаль акселератора.
В этом случае оставшаяся емкость SOC устройства BATT накопления электроэнергии увеличивается осуществлением действий рекуперации электродвигателя MG наряду с поддержанием общей величины потребления топлива BSFC двигателя ENG внутреннего сгорания.
Также в случае, когда транспортное средство осуществляет движение установлением ступени скорости трансмиссии (например, ступень пятой скорости) с состоянием соединения первым механизмом SM1 зацепления, требуемая движущая сила Tq является небольшой и возможно выполнить движение транспортного средства на пониженной ступени скорости (например, ступени третьей скорости, или ступени четвертой скорости), чем ступень текущей скорости (например, ступень пятой скорости) со ссылкой на карту M1 так, что если величина потребления топлива ухудшается от предопределенного порогового значения, установленного заранее, если транспортное средство продолжает двигаться на текущей ступени скорости (например, ступени пятой скорости), одно из первого средства или второго средства, поясненных ниже, осуществляется избирательно. Поступая таким образом, становится возможным предотвращать ухудшение величины потребления топлива посредством продолжения движения на текущей ступени скорости. Дополнительно, электричество, вырабатываемое действием рекуперации электродвигателя MG предоставлением разности между требуемой движущей силой Tq и двигателем ENG внутреннего сгорания для него, может предоставляться на устройство BATT накопления электроэнергии, и вырабатываемое электричество может сохраняться в устройстве BATT накопления электроэнергии.
Первое средство выполняет движение транспортного средства посредством первой настройки первого сцепления C1 в разомкнутое состояние, устанавливая второе сцепление C2 в состояние передачи и устанавливая ступень скорости (например, ступень четвертой скорости) посредством состояния соединения второго механизма SM2 зацепления и также присоединяет первый входной вал 4 к зубчатой передаче (зубчатой передаче третьей скорости или зубчатой передачи пятой скорости) посредством первого механизма SM1 зацепления. Зубчатая передача, присоединяемая первым механизмом SM1 зацепления, выбирается так, чтобы максимизировать эффективность обеспечения величины рекуперации. Вторые средства изменяют зубчатую передачу, присоединенную первым избирающим элементом (например, зубчатую передачу пятой скорости G5) к зубчатой передаче с пониженным передаточным числом (например, зубчатую передачу третьей скорости). Однако перед установкой второго сцепления C2 в состояние передачи, подсоединенное состояние осуществляется посредством второго механизма SM2 зацепления. Поступая таким образом, становится возможным избегать передачи толчка водителю.
Предпочтительно при выборе того, осуществлять ли первым средством или осуществлять вторым средством, отдается приоритет сохранению электроэнергии в устройстве BATT накопления электроэнергии в случае зоны В, зоны С или L зоны А и отдается приоритет величине потребления топлива в случае зоны D, H зоны A или M зоны A. В случае выбора наряду с отдачей приоритета сохранению электроэнергии в устройстве BATT накопления электроэнергии определяется ступень скорости, например посредством ссылки к карте, показывающей эффективность питания/рекуперации с взаимоотношением между скоростью транспортного средства и крутящим моментом. В случае выбора наряду с отдачей приоритета величине потребления топлива ступень скорости определяется, например, посредством ссылки к характеристике показывающей общую величину потребления топлива (BSFC) с взаимоотношением между скоростью транспортного средства и крутящим моментом.
Дополнительно, автоматическая трансмиссия, предусмотренная для гибридного транспортного средства настоящего изобретения, не ограничена для автоматической трансмиссии 1, имеющей пять передних ступеней скорости и одну ступень задней скорости поясненной выше и может быть, например, автоматическая трансмиссия 1A, имеющая семь передних ступеней скорости и одну ступень задней скорости, как это показано на фиг.8.
Автоматическая трансмиссия 1А оборудована множеством зубчатых передач G2-G7 с различными передаточными числами, ведущими шестернями G3a, G5a и G7a, нечетными зубчатыми передачами G3, G5 и G7 с возможностью вращения поддерживаются первым входным валом 4 и ведущими шестернями G2a, G4a, и G6a четных зубчатых передач G2, G4, и G6 с возможностью вращения поддерживаются вторым входным валом 5.
На выходной вал 3a закрепляются первая ведущая шестерня Go1, зацепленная с ведущей шестерней G2a второй скорости и ведущей шестерней G3a третьей скорости, вторая ведущая шестерня Go2, зацепленная с ведущей шестерней G6a шестой скорости и ведущей шестерней G7a седьмой скорости и третья ведущая шестерня Go3, зацепленная с ведущей шестерней G4a четвертой скорости и с ведущей шестерней G5a пятой скорости.
Первый входной вал 4 предоставляет возможность первому механизму SM1 зацепления, который является первым избирающим элементом, способным переключать либо в состояние соединения со стороной третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, состояние соединения со стороной седьмой скорости, в котором ведущая шестерня G7a седьмой скорости и первый входной вал 4 соединены и нейтральное состояние, в котором присоединение ведущей шестерни G3a третьей скорости и ведущей шестерни G7a седьмой скорости к первому входному валу 4 отключено.
Первый входной вал 4 дополнительно снабжен четвертым механизмом SM4 зацепления, который является первым избирающим элементом, способным переключать либо в состояние соединения со стороной пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены, и нейтральное состояние, в котором соединение ведущей шестерни G5a пятой скорости к первому входному валу 4 отключено.
Второй входной вал 5 предоставляет возможность второму механизму SM2 зацепления, который является вторым избирающим элементом, способность переключать либо в состояние соединения со стороной второй скорости, в котором ведущая шестерня G2a второй скорости и второй входной вал 5 соединены, состояние соединения со стороной шестой скорости, в котором ведущая шестерня G6a шестой скорости и второй входной вал 5 соединены и нейтральное состояние, в котором соединение ведущей шестерни G2a второй скорости и ведущей шестерни G6a шестой скорости ко второму входному валу 5 отключено.
Второй входной вал 5 дополнительно снабжен пятым механизмом SM5 зацепления, который является вторым избирающим элементом, способным переключать либо в состояние соединения со стороной четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены и нейтральное состояние, в котором соединение ведущей шестерни G4a четвертой скорости ко второму входному валу 5 отключено.
Гибридное транспортное средство, оборудованное автоматической трансмиссией 1А, сконфигурировано, как пояснено выше, способным к осуществлению запуска IMA и движения ENG, движения HEV и движения EV в состоянии, когда семь ступеней передней скорости и ступень задней скорости устанавливаются соответственно и управление остановкой холостого хода и управление во время движения EV исполняются устройством ECU управления мощностью.
Дополнительно, автоматическая трансмиссия, предусмотренная для гибридного транспортного средства настоящего изобретения, не является ограничением для автоматической трансмиссии, в которой механизм вывода составлен из одного выходного вала 3a, и может быть, например, одним из вариантов, в котором выходной механизм составлен из двух выходных валов, один выходной вал присоединяется к первому входному валу через зубчатую передачу, выбранную посредством первого избирающего элемента, и другой выходной вал присоединяется ко второму входному валу через зубчатую передачу, выбранную посредством второго избирающего элемента.

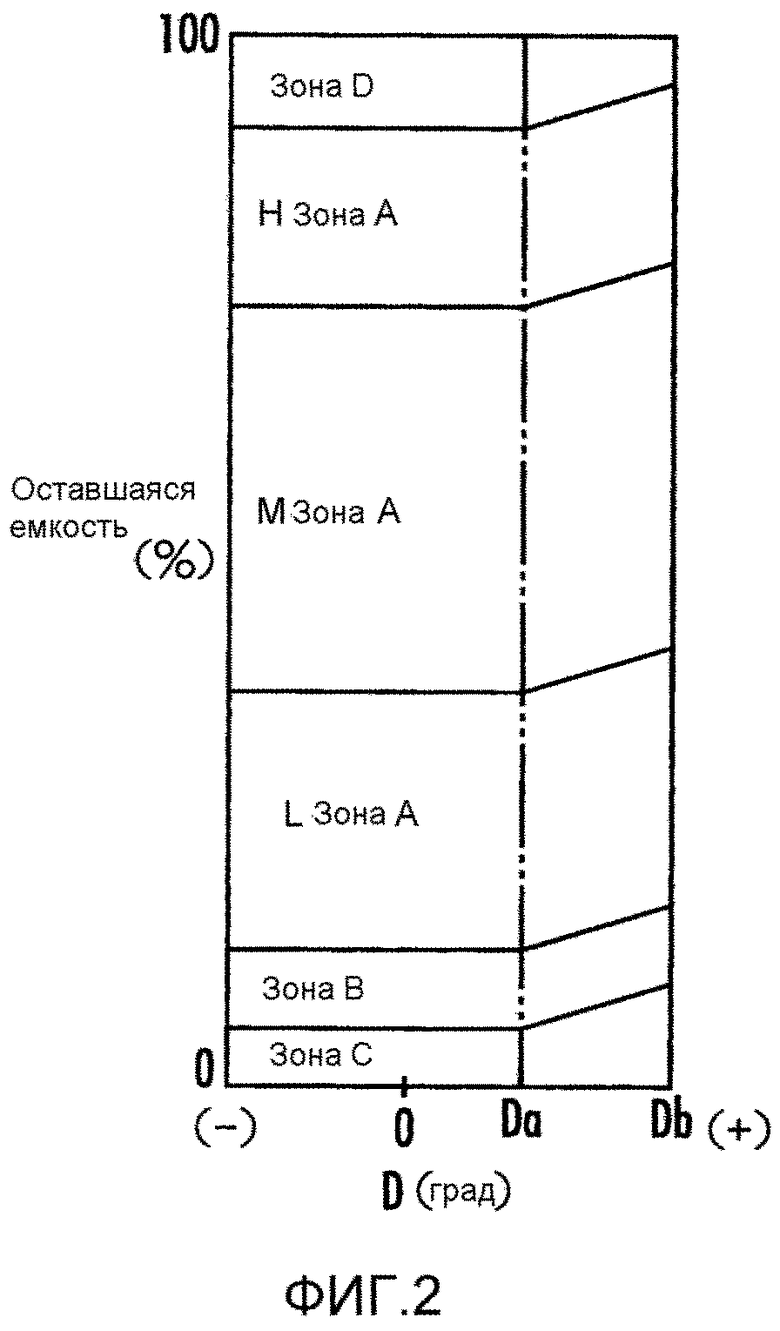
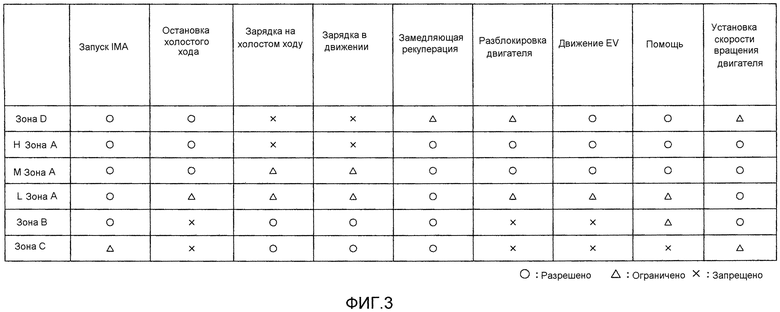
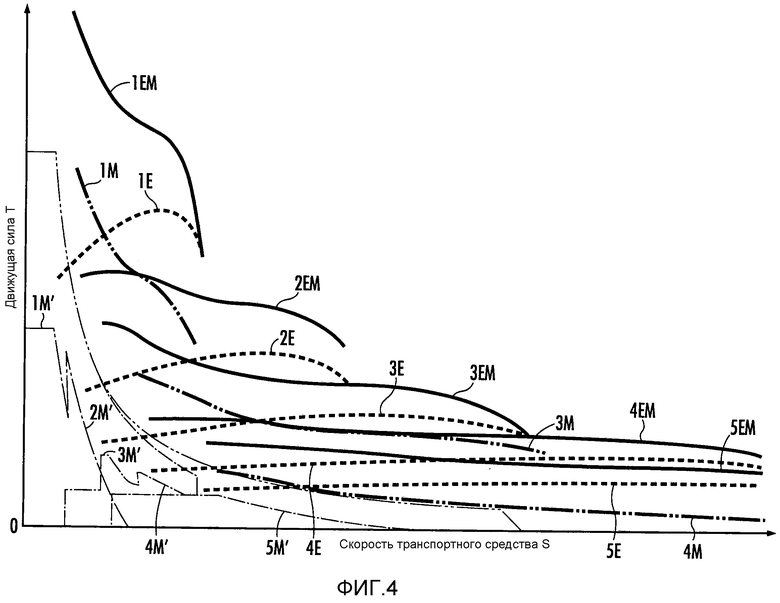
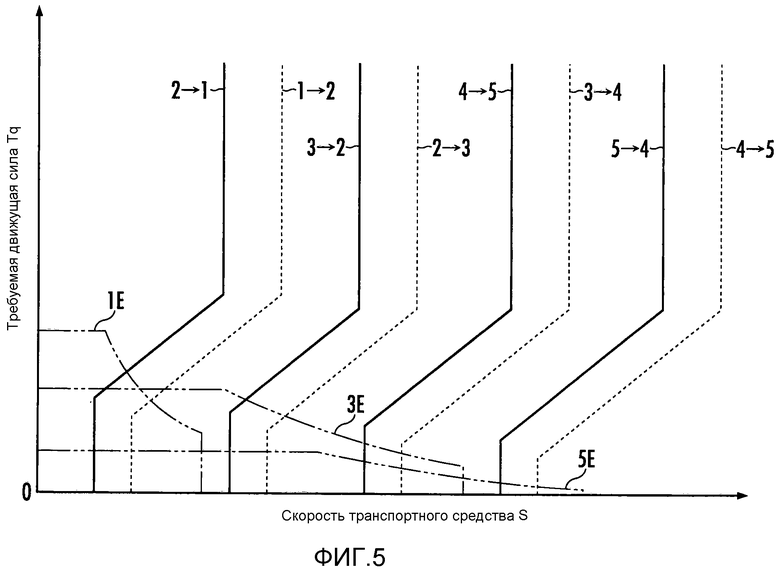
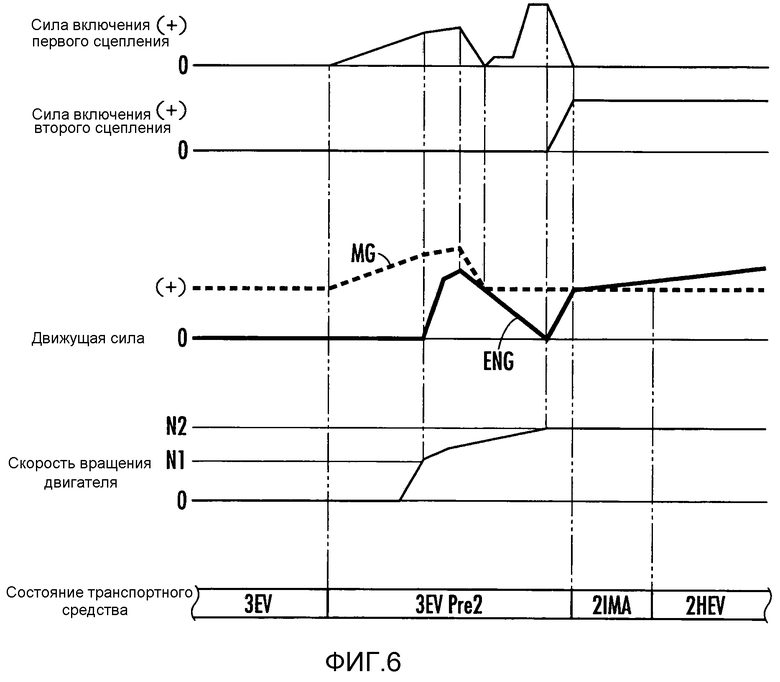
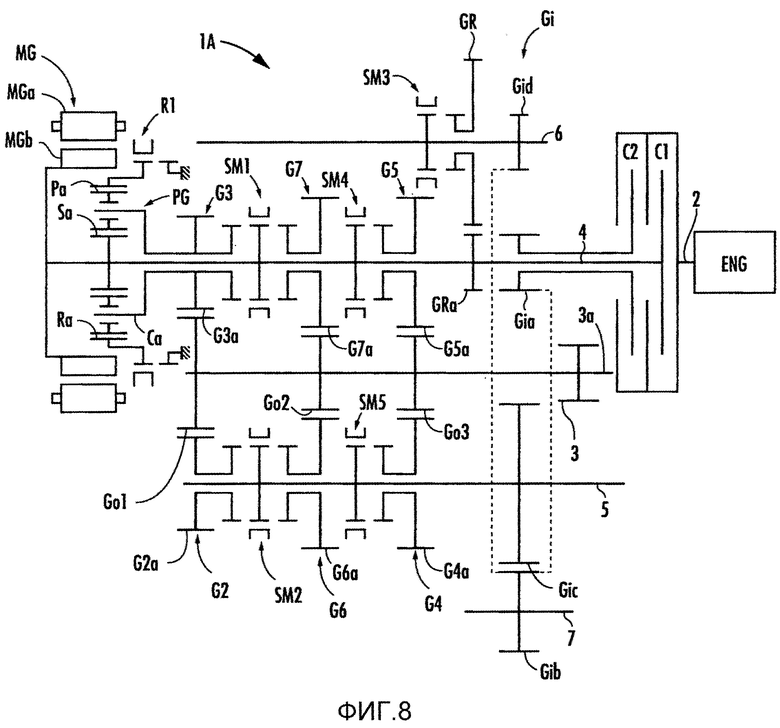
Изобретение относится к гибридному транспортному средству. Гибридное транспортное средство содержит двигатель внутреннего сгорания, электродвигатель, устройство накопления электроэнергии, автоматическую трансмиссию, элемент детектирования оставшейся емкости устройства накопления электроэнергии, элемент получения требуемой движущей силы, элемент получения движущей силы электродвигателя и элемент управления, определяющий высшую ступень скорости электродвигателя. Также имеются карта управления скорости и элемент различения зоны разряда, а также два механизма преобразования. Обеспечивается возможность рационального выбора состояния движения и ступеней скорости. 2 н. и 6 з.п. ф-лы, 8 ил.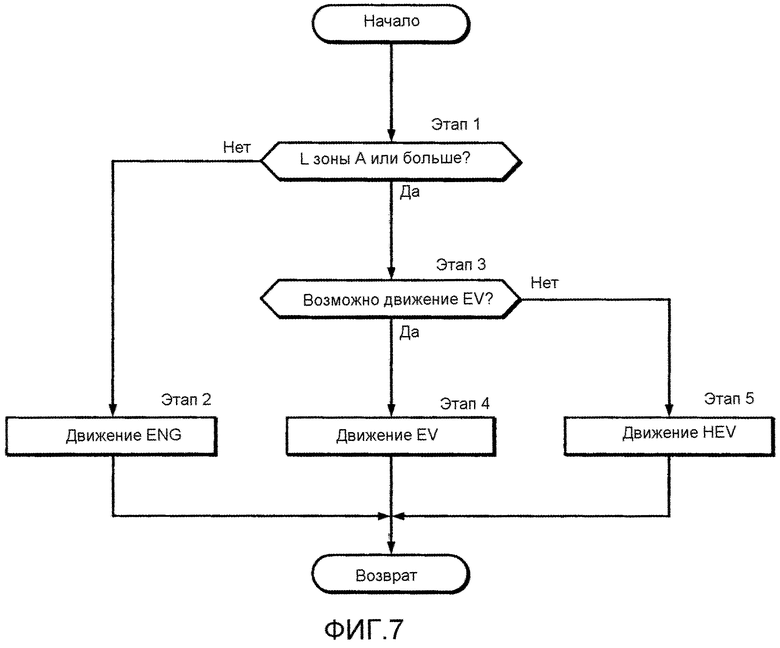
1. Гибридное транспортное средство, содержащее: двигатель внутреннего сгорания; электродвигатель;
устройство накопления электроэнергии, предоставляющее и принимающее электрическую энергию к и из электродвигателя;
автоматическую трансмиссию, включающую в себя первый механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который подключен к электродвигателю, и второй механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, причем движущая выходная мощность из двигателя внутреннего сгорания и электродвигателя изменяется во множество ступеней скорости и выводится;
элемент детектирования оставшейся емкости, который детектирует оставшуюся емкость устройства накопления электроэнергии;
элемент получения требуемой движущей силы, который получает требуемую движущую силу, которая должна выводиться;
элемент получения движущей силы электродвигателя, который получает максимальную движущую силу электродвигателя, выводимую согласно каждой ступени скорости посредством движущей выходной мощности из электродвигателя, по меньшей мере, принимая во внимание, оставшуюся емкость устройства накопления электроэнергии, детектируемую элементом детектирования оставшейся емкости;
и элемент управления, который определяет высшую ступень скорости, на которой электродвигатель способен выводить требуемую движущую силу, причем
когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы, равна или меньше, чем максимальная движущая сила электродвигателя, полученная посредством элемента получения движущей силы электродвигателя, управляет автоматической трансмиссией так, чтобы устанавливалась определенная ступень скорости, причем управляет так, чтобы осуществлять движение транспортного средства только от движущей силы электродвигателя, посредством установки первого элемента переключения и второго элемента переключения в разомкнутое состояние,
карту управления скорости, которая выбирает ступень скорости автоматической трансмиссии на основе требуемой движущей силы, полученной элементом получения требуемой движущей силы, и
элемент различения зоны, который различает, на основе детектированной оставшейся емкости, детектированной элементом детектирования оставшейся емкости, стандартную зону, зону ограниченного разряда, в которой оставшаяся емкость меньше, чем в стандартной зоне, зону запрещенного разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда, и зону запрещенного заряда, в которой оставшаяся емкость больше, чем в стандартной зоне,
причем первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который соединен с электродвигателем, и первый избирающий элемент, который соединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач,
второй механизм преобразования включает в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, и второй избирающий элемент, который соединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и
когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания установлением ступени скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, в случае изменения в сторону более низкой ступени скорости автоматической трансмиссии с учетом карты управления скорости, элемент управления устанавливает ступень скорости ниже на одну ступень скорости от упомянутой ступени скорости, установкой первого элемента переключения в состояние прерванной передачи и второго избирающего элемента в соединенное состояние и второго элемента переключения в состояние передачи, согласно оцененному значению требуемой движущей силы в случае, когда зона, различенная посредством элемента различения зоны, является стандартной зоной и в дальнейшем заставляет электродвигатель осуществлять действие питания/рекуперации посредством либо возврата на ступень скорости, либо установкой первого избирающего элемента в состояние, когда установлена ступень скорости дополнительно пониженная на одну ступень скорости.
2. Гибридное транспортное средство по п. 1,
в котором, первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который соединен с электродвигателем, и первый избирающий элемент, который соединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач,
второй механизм преобразования включает в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, и второй избирающий элемент, который соединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и
в случае, когда транспортное средство осуществляет движение только движущей силой электродвигателя посредством установки ступени скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, превышает максимальную движущую силу электродвигателя, полученную элементом получения движущей силы электродвигателя, элемент управления соединяет зубчатую передачу с механизмом вывода вторым избирающим элементом без установки второго элемента переключения в состояние передачи, наряду с поддержанием соединенного состояния первым избирающим элементом, запускает двигатель внутреннего сгорания посредством постепенной установки первого элемента переключения в состояние передачи, в дальнейшем создавая воспламенение в двигателе внутреннего сгорания и осуществляя движение транспортного средства движущей силой двигателя внутреннего сгорания и электродвигателя, установкой второго элемента переключения в состояние передачи после завершения запуска двигателя внутреннего сгорания.
3. Гибридное транспортное средство по п.п. 1 или 2,
в котором, в случае, когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания и электродвигателя, когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы, становится равной или меньшей, чем максимальная движущая сила электродвигателя, полученная посредством элемента получения движущей силы электродвигателя, элемент управления устанавливает первый элемент переключения и второй элемент переключения в прерванное состояние и осуществляет движение транспортного средства только движущей силой электродвигателя.
4. Гибридное транспортное средство, содержащее
двигатель внутреннего сгорания;
электродвигатель;
устройство накопления электроэнергии, предоставляющее и принимающее электрическую энергию к и из электродвигателя;
автоматическую трансмиссию, включающую в себя первый механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который подключен к электродвигателю, и второй механизм преобразования, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, причем движущая выходная мощность из двигателя внутреннего сгорания и электродвигателя изменяется во множество ступеней скорости и выводится;
элемент детектирования оставшейся емкости, который детектирует оставшуюся емкость устройства накопления электроэнергии;
элемент получения требуемой движущей силы, который получает требуемую движущую силу, которая должна выводиться;
элемент получения движущей силы электродвигателя, который получает максимальную движущую силу электродвигателя, выводимую согласно каждой ступени скорости посредством движущей выходной мощности из электродвигателя, по меньшей мере, принимая во внимание, оставшуюся емкость устройства накопления электроэнергии, детектируемую элементом детектирования оставшейся емкости;
и элемент управления, который определяет высшую ступень скорости, на которой электродвигатель способен выводить требуемую движущую силу, причем
когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы, равна или меньше, чем максимальная движущая сила электродвигателя, полученная посредством элемента получения движущей силы электродвигателя, управляет автоматической трансмиссией так, чтобы устанавливалась определенная ступень скорости, причем управляет так, чтобы осуществлять движение транспортного средства только от движущей силы электродвигателя, посредством установки первого элемента переключения и второго элемента переключения в разомкнутое состояние,
карту управления скорости, которая выбирает ступень скорости автоматической трансмиссии на основе требуемой движущей силы, полученной элементом получения требуемой движущей силы, и
элемент различения зоны который различает, на основе оставшейся емкости, детектированной элементом детектирования оставшейся емкости, стандартную зону, зону ограниченного разряда, в которой оставшаяся емкость меньше, чем в стандартной зоне, и зону запрещенного разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда,
причем первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который соединяется с электродвигателем, и первый избирающий элемент, который соединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач,
второй механизм преобразования включает в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, и второй избирающий элемент соединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и
когда транспортное средство осуществляет движение, посредством движущей силы двигателя внутреннего сгорания, устанавливая ступень скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, в случае изменения в сторону более низкой ступени скорости автоматической трансмиссии, с учетом карты управления скорости, элемент управления поддерживает ступень скорости в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда или зоной запрещенного разряда.
5. Гибридное транспортное средство по п. 4,
в котором, первый механизм преобразования включает в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который соединен с электродвигателем, и первый избирающий элемент, который соединяет первый входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач,
второй механизм преобразования включает в себя второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, и второй избирающий элемент, который соединяет второй входной вал и механизм вывода через зубчатую передачу, выбранную из множества зубчатых передач, и
в случае, когда транспортное средство осуществляет движение только движущей силой электродвигателя посредством установки ступени скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, превышает максимальную движущую силу электродвигателя, полученную элементом получения движущей силы электродвигателя, элемент управления соединяет зубчатую передачу с механизмом вывода вторым избирающим элементом без установки второго элемента переключения в состояние передачи, наряду с поддержанием соединенного состояния первым избирающим элементом, запускает двигатель внутреннего сгорания посредством постепенной установки первого элемента переключения в состояние передачи, в дальнейшем создавая воспламенение в двигателе внутреннего сгорания и осуществляя движение транспортного средства движущей силой двигателя внутреннего сгорания и электродвигателя, установкой второго элемента переключения в состояние передачи после завершения запуска двигателя внутреннего сгорания.
6. Гибридное транспортное средство по п.п. 4 или 5,
в котором, в случае, когда транспортное средство осуществляет движение посредством движущей силы двигателя внутреннего сгорания и электродвигателя, когда требуемая движущая сила, полученная посредством элемента получения требуемой движущей силы, становится равной или меньшей, чем максимальная движущая сила электродвигателя, полученная посредством элемента получения движущей силы электродвигателя, элемент управления устанавливает первый элемент переключения и второй элемент переключения в прерванное состояние и осуществляет движение транспортного средства только движущей силой электродвигателя.
7. Гибридное транспортное средство по п. 4,
в котором, в случае, когда транспортное средство осуществляет движение посредством установления ступени скорости автоматической трансмиссии в соединенное состояние первым избирающим элементом, когда требуемая движущая сила, полученная элементом получения требуемой движущей силы, небольшая и возможно осуществлять движение транспортного средства на более низкой ступени скорости, чем ступень текущей скорости, с учетом карты управления скорости, и, если движение совершается на ступени текущей скорости, норма потребления топлива становится хуже, чем предопределенное пороговое значение,
элемент управления подает электроэнергию на устройство накопления электроэнергии посредством рекуперации разности между требуемой движущей силой и движущей силой двигателя внутреннего сгорания посредством электродвигателя посредством одного из
первого способа, в котором транспортное средство осуществляет движение посредством установления ступени скорости автоматической трансмиссии в соединенное состояние посредством второго избирающего элемента установкой второго элемента переключения в состояние передачи после установки первого элемента переключения в прерванное состояние, и первый входной вал соединен с зубчатой передачей первым избирающим элементом, или
второго способа, в котором зубчатая передача, соединенная посредством первого избирающего элемента изменяется на зубчатую передачу с более низким передаточным числом.
8. Гибридное транспортное средство по п. 7,
в котором, в случае осуществления первого способа, элемент управления осуществляет соединение первого избирающего элемента с первым входным валом и механизмом вывода посредством зубчатой передачи, в которой эффективность величины надежной рекуперации максимальная.
| US 2002033059 A1, 21.03.2002 | |||
| JP 2003165358 A, 10.06.2003 | |||
| US 2006102409 A1, 18.05.2006 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ВЫДАЧИ МОЩНОСТИ | 2005 |
|
RU2334624C2 |

