Область техники, к которой относится изобретение
Данное изобретение относится к гибридному транспортному средству, способу управления гибридным транспортным средством и устройству выдачи мощности.
Уровень техники
Одно предложенное гибридное транспортное средство имеет двигатель, блок планетарной передачи, включающей водило и зубчатый венец, соединенные, соответственно, с коленчатым валом двигателя и приводным валом, первый электродвигатель, соединенный с солнечной шестерней блока планетарной передачи, второй электродвигатель, соединенный с приводным валом, и батарею, способную передавать электрическую энергию в первый электродвигатель и от него и во второй электродвигатель и от него (см., например, Бюллетень выложенных патентов Японии №11-93727). В этом предложенном гибридном транспортном средстве первый электродвигатель приводят в действие и управляют им для регулирования скорости вращения двигателя.
Сущность изобретения
В гибридном транспортном средстве, оборудованном двигателем и приводным электродвигателем, общий процесс управления изменяет скорость вращения двигателя и прерывисто включает и выключает двигатель при изменении требуемой мощности двигателя с целью улучшения эффективности использования энергии. В ответ на требование водителя выполнить торможение требуемая мощность двигателя в основном уменьшается до 0 или до уровня мощности торможения (работы сил трения), и, соответственно, снижается скорость вращения двигателя. Водитель может выдать требование на большое ускорение непосредственно после требования на торможение. Приводной электродвигатель включается с помощью электропитания из батареи для компенсации недостаточной мощности вследствие плохой реакции двигателя. Батарея большой емкости поставляет достаточное количество требуемой электрической мощности для замены недостающей мощности, однако, естественно, имеет большие размеры и массу, не подходящие для оборудования гибридного автомобиля. Однако батарея небольшой емкости не может поставлять достаточной требуемой электрической энергии для замены недостающей мощности. Большой недостаток мощности увеличивает требуемую электрическую мощность, которую должна отдавать батарея. Повторные заряды и разряды батареи с относительно большой электрической мощностью внутри допустимого диапазона входных и выходных границ вызывают нежелательное преждевременное старение батареи.
Таким образом, гибридное транспортное средство, способ управления гибридным транспортным средством и устройство выдачи мощности согласно изобретению имеют целью улучшение реакции на требование изменения выходной мощности двигателя внутреннего сгорания. Гибридное транспортное средство, способ управления гибридным транспортным средством и устройство выдачи мощности согласно изобретению имеют целью также уменьшение нагрузки блока аккумулятора, такого как вторичная батарея. Гибридное транспортное средство, способ управления гибридным транспортным средством и устройство выдачи мощности согласно изобретению имеют дополнительно целью улучшение эффективности использования энергии гибридного транспортного средства или устройства выдачи мощности.
По меньшей мере, часть указанных выше и связанных с ними целей достигнуты с помощью гибридного транспортного средства, способа управления гибридным транспортным средством и устройством выдачи мощности, имеющих указанные ниже конфигурации и системы.
Данное изобретение направлено на создание гибридного транспортного средства, включающего: двигатель внутреннего сгорания; механизм ввода и вывода электрической энергии и механической энергии, который соединен с выходным валом двигателя внутреннего сгорания и с приводным валом, связанным с осью гибридного транспортного средства, принимает мощность с входного вала и приводного вала и выдает мощность на выходной вал и приводной вал через ввод-вывод электрической мощности и механической мощности; электродвигатель, который принимает мощность с одной или другой оси и выдает мощность на одну или другую ось, которая отлична от первой оси; блок аккумуляторов, который передает электрическую мощность в механизм ввода-вывода электрической мощности и механической мощности и электродвигатель и получает ее от них; модуль регулирования требуемой приводной мощности, который устанавливает требуемую приводную мощность, необходимую для привода гибридного транспортного средства; модуль измерения скорости транспортного средства, который измеряет скорость гибридного транспортного средства; модуль регулирования нижнего предела скорости вращения, который устанавливает нижний предел скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости транспортного средства; и управляющий модуль, который управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не ниже, чем установленный нижний предел скорости вращения, и для привода гибридного транспортного средства с мощностью, соответствующей установленной требуемой приводной мощности.
Гибридное транспортное средство согласно изобретению устанавливает нижний предел скорости вращения, который является минимальной допустимой скоростью вращения двигателя внутреннего сгорания, соответствующей измеренной скорости транспортного средства. Управление двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем осуществляется для привода двигателя внутреннего сгорания со скоростью вращения не ниже установленного нижнего предела скорости вращения и для привода гибридного транспортного средства с мощностью, соответствующей установленной требуемой приводной мощности. Двигатель внутреннего сгорания может увеличивать выходную мощность посредством увеличения лишь скорости вращения с фиксированным выходным крутящим моментом или же посредством увеличения лишь крутящего момента с фиксированной скоростью вращения. Увеличение выходного крутящего момента, достигнутое с помощью изменения входного потока воздуха и количества впрыскиваемого топлива, требует меньше времени, чем увеличение скорости вращения. Таким образом, увеличение выходной мощности с помощью изменения выходного крутящего момента может быть достигнуто в течение более короткого периода времени, чем увеличение выходной мощности с помощью изменения скорости вращения. Двигатель внутреннего сгорания, работающий со скоростью вращения не меньше нижнего предела скорости вращения, который зависит от измеренной скорости транспортного средства, имеет более быструю реакцию на требование увеличения мощности, выдаваемой двигателем внутреннего сгорания. Эта система желательным образом понижает выходную мощность электродвигателя, который включается для компенсации недостатка мощности, требуемой для привода гибридного транспортного средства, за счет задержанной реакции двигателя внутреннего сгорания, что эффективно снижает нагрузку блока аккумуляторов.
В одном предпочтительном варианте выполнения изобретения гибридное транспортное средство дополнительно включает модуль регулирования требуемой скорости вращения, который устанавливает требуемую скорость вращения, с которой должен приводиться двигатель внутреннего сгорания, соответствующую установленной требуемой выходной мощности. Управляющий модуль управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания с более высокой скоростью вращения между установленным нижним пределом скорости вращения и установленной требуемой скоростью вращения. Таким образом, двигатель внутреннего сгорания работает со скоростью вращения, определяемой с учетом как требуемой скорости вращения, которая зависит от требуемой приводной мощности, так и нижнего предела скорости вращения, который зависит от скорости транспортного средства. А именно двигатель внутреннего сгорания работает в адекватной точке привода. Модуль регулирования требуемой скорости вращения может устанавливать требуемую скорость вращения в качестве удельной скорости вращения двигателя внутреннего сгорания, которая обеспечивает эффективную выдачу мощности, соответствующей установленной требуемой приводной мощности двигателя внутреннего сгорания. Эта система поддерживает быструю реакцию двигателя внутреннего сгорания при одновременном улучшении эффективности использования энергии гибридным транспортным средством.
В гибридном транспортном средстве согласно изобретению модуль регулирования нижнего предела скорости вращения предпочтительно устанавливает нижний предел скорости вращения на скорость вращения не меньше удельной скорости вращения двигателя внутреннего сгорания в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности из двигателя внутреннего сгорания для привода с постоянной скоростью гибридного транспортного средства на по существу плоской дорожной поверхности с измеренной скоростью транспортного средства. Даже в случае небольшой текущей требуемой мощности, подлежащей выдаче из двигателя внутреннего сгорания, эта система обеспечивает быструю выдачу двигателем внутреннего сгорания требуемой мощности для привода с постоянной скоростью гибридного транспортного средства или большей мощности в ответ на последующее требование изменения выходной мощности.
В гибридном транспортном средстве согласно изобретению предпочтительно также, что управляющий модуль управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для отсечки впрыска топлива в двигатель внутреннего сгорания, когда установленная требуемая приводная мощность эквивалентна заданной тормозной мощности для торможения гибридного транспортного средства. Эта система улучшает потребление топлива и повышает общую эффективность использования топлива гибридного транспортного средства.
В гибридном транспортном средстве согласно изобретению механизм ввода-вывода электрической мощности - механической мощности предпочтительно включает модуль ввода-вывода механического типа, который соединен с тремя валами, а именно выходным валом двигателя внутреннего сгорания, приводным валом и вращающимся валом, и автоматически определяет ввод мощности с и вывод мощности в оставшийся один вал на основе ввода мощности с и вывода мощности к любым двум валам среди трех валов; и генератор, который вводит мощность с и выдает мощность во вращающийся вал. Кроме того, механизм ввода-вывода электрической мощности и механической мощности предпочтительно включает электродвигатель с парным ротором, который имеет первый ротор, соединенный с выходным валом двигателя внутреннего сгорания, и второй ротор, соединенный с приводным валом, и приводится во вращение посредством относительного вращения первого ротора относительно второго ротора.
Данное изобретение направлено на создание устройства выдачи мощности, которое выдает мощность на приводной вал и которое включает: двигатель внутреннего сгорания, механизм ввода-вывода электрической мощности и механической мощности, который соединен с выходным валом двигателя внутреннего сгорания и с приводным валом и вводит и выдает мощность с и на выходной вал и приводной вал через ввод и вывод электрической мощности и механической мощности; электродвигатель, который вводит и выдает мощность с и в приводной вал; блок аккумуляторов, который передает электрическую мощность в и из механизма ввода-вывода электрической мощности и механической мощности и электродвигателя; модуль регулирования требуемой мощности, который устанавливает требуемую мощность, необходимую для приводного вала; модуль измерения скорости вращения, который измеряет скорость вращения приводного вала; модуль регулирования нижнего предела скорости вращения, который устанавливает нижний предел скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости вращения; и управляющий модуль, который управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности - механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не меньше установленного нижнего предела скорости вращения и для выдачи мощности, соответствующей требуемой мощности, на приводной вал.
Устройство выдачи мощности согласно изобретению устанавливает нижний предел скорости вращения, который является минимальной допустимой скоростью вращения двигателя внутреннего сгорания, соответствующей измеренной скорости вращения приводного вала. Управление двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем осуществляется для привода двигателя внутреннего сгорания со скоростью вращения не меньше установленного нижнего предела скорости вращения и для выдачи мощности, соответствующей установленной требуемой мощности, на приводной вал. Как указывалось выше, увеличение выходной мощности с изменением выходного крутящего момента можно достичь внутри более короткого периода времени, чем увеличение выходной мощности с изменением скорости вращения. Двигатель внутреннего сгорания, работающий со скоростью вращения не меньше установленного нижнего предела скорости вращения, который зависит от измеренной скорости вращения приводного вала, имеет более быструю реакцию на требование увеличения мощности, подлежащей выдаче из двигателя внутреннего сгорания. Эта система увеличивает желаемым образом выходную мощность электродвигателя, который включается для компенсации недостаточной мощности, необходимой для приводного вала, за счет замедленной реакции двигателя внутреннего сгорания, что эффективно снижает нагрузку блока аккумуляторов. Устройство выдачи мощности согласно изобретению можно устанавливать на транспортное средство, которое имеет одну ось, соединенную с приводным валом. Тогда двигатель внутреннего сгорания работает со скоростью вращения не меньше нижнего предела скорости вращения, который зависит от скорости вращения оси. Система установки нижнего предела скорости вращения, соответствующего скорости транспортного средства вместо скорости вращения оси, находится внутри объема характеристик гибридного транспортного средства согласно изобретению, описание которого приведено выше. А именно различные варианты выполнения и системы гибридного транспортного средства согласно изобретению, описание которых приведено выше, применимы для устройства выдачи мощности с заменой скорости транспортного средства на скорость вращения приводного вала.
Данное изобретение направлено на создание способа управления гибридным транспортным средством, включающим: двигатель внутреннего сгорания; механизм ввода-вывода электрической мощности и механической мощности, который соединен с выходным валом двигателя внутреннего сгорания и с приводным валом, связанным с одной осью гибридного транспортного средства, и вводит, и выдает мощность с и на выходной вал и приводной вал через ввод и вывод электрической мощности и механической мощности; электродвигатель, который вводит и выдает мощность из и в одну ось или другую ось, которая отлична от первой оси; и блок аккумуляторов, который передает электрическую мощность в и из механизма ввода-вывода электрической мощности и механической мощности и электродвигателя, при этом способ содержит стадии: (а) установки требуемой приводной мощности, необходимой для привода гибридного транспортного средства; (b) установки нижнего предела скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости транспортного средства; и (с) управления двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не меньше установленного нижнего предела скорости вращения и для привода гибридного транспортного средства с мощностью, соответствующей установленной требуемой приводной мощности.
Способ управления гибридным транспортным средством согласно изобретению устанавливает нижний предел скорости вращения, который является минимальной допустимой скоростью вращения двигателя внутреннего сгорания, соответствующей измеренной скорости транспортного средства. Управление двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем осуществляется для привода двигателя внутреннего сгорания со скоростью вращения не ниже установленного нижнего предела скорости вращения и для привода гибридного транспортного средства с мощностью, соответствующей требуемой приводной мощности. Этот процесс управления обеспечивает быструю реакцию двигателя внутреннего сгорания на требование увеличения мощности, подлежащей выдачи из двигателя внутреннего сгорания. Эта система уменьшает желаемым образом выходную мощность электродвигателя, который включается для компенсации недостаточной мощности, необходимой для привода гибридного транспортного средства, за счет задержанной реакции двигателя внутреннего сгорания, что эффективно уменьшает нагрузку аккумуляторного блока.
Краткое описание чертежей
На фиг.1 дана конфигурация гибридного транспортного средства согласно одному варианту выполнения изобретения;
на фиг.2 - графическая схема процесса управления приводом, выполняемого гибридным электронным управляющим блоком, включенным в гибридное транспортное средство, согласно фиг.1;
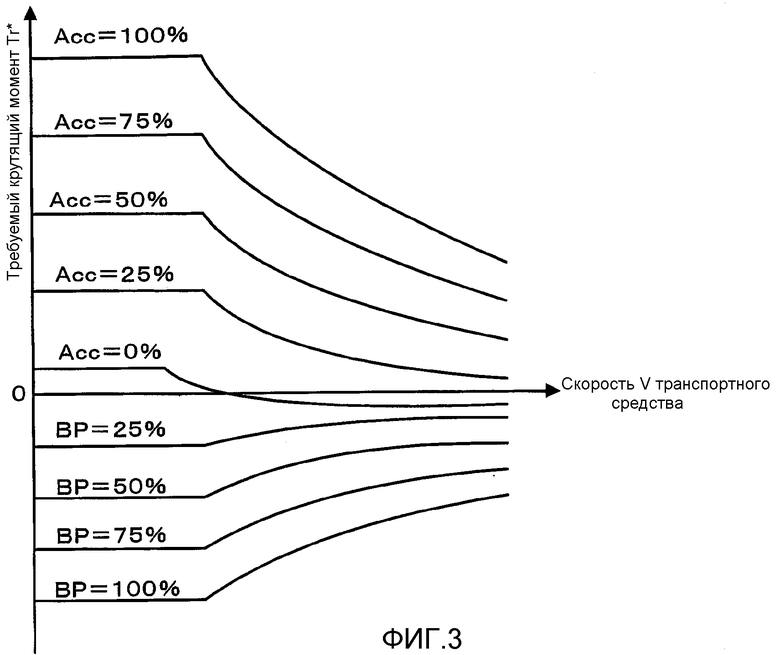
на фиг.3 - пример отображения установки требуемого крутящего момента;
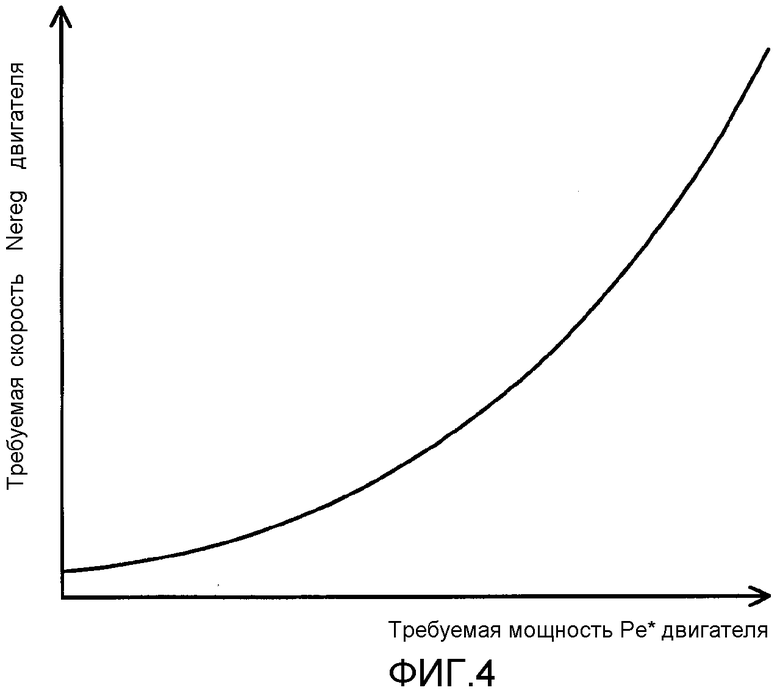
на фиг.4 - пример отображения установки требуемой скорости вращения двигателя;
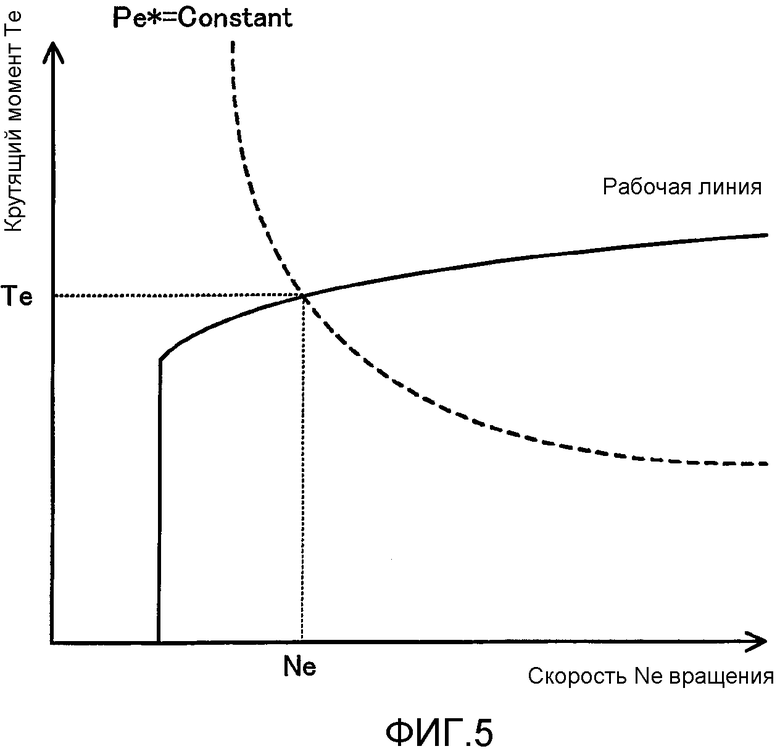
на фиг.5 - рабочая линия двигателя с постоянной кривой требуемой мощности Р* двигателя;
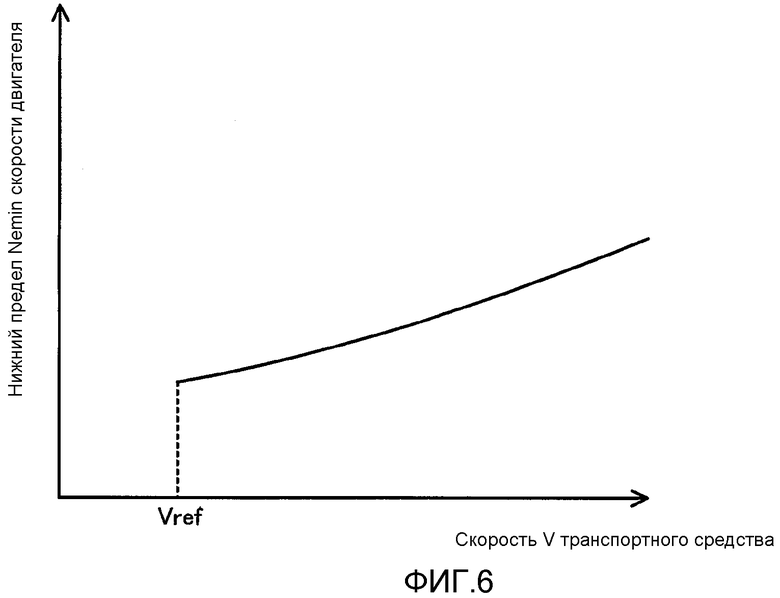
на фиг.6 - пример отображения установки нижней скорости двигателя;
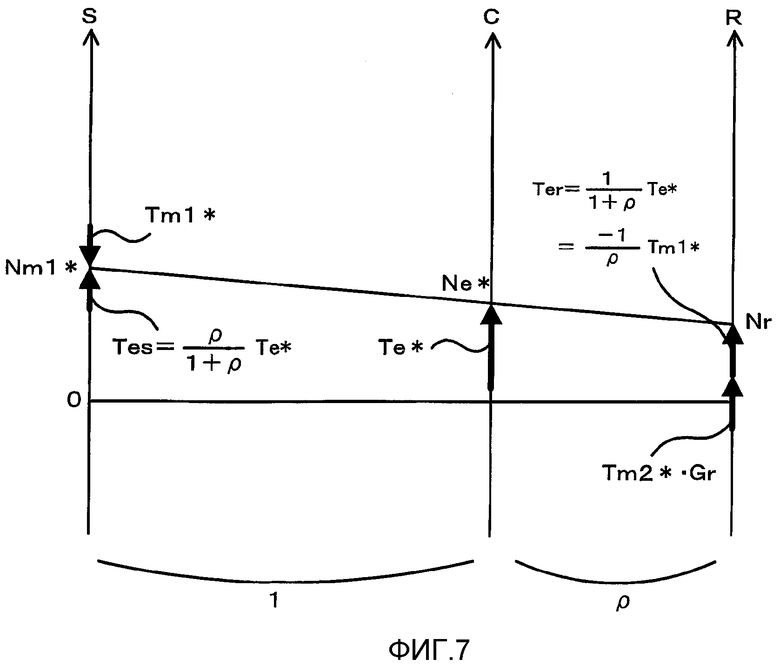
на фиг.7 - номограмма, показывающая изменение крутящего момента в зависимости от скорости вращения соответствующих элементов вращения механизма интеграции распределения мощности, включенного в гибридное транспортное средство, согласно фиг.1;
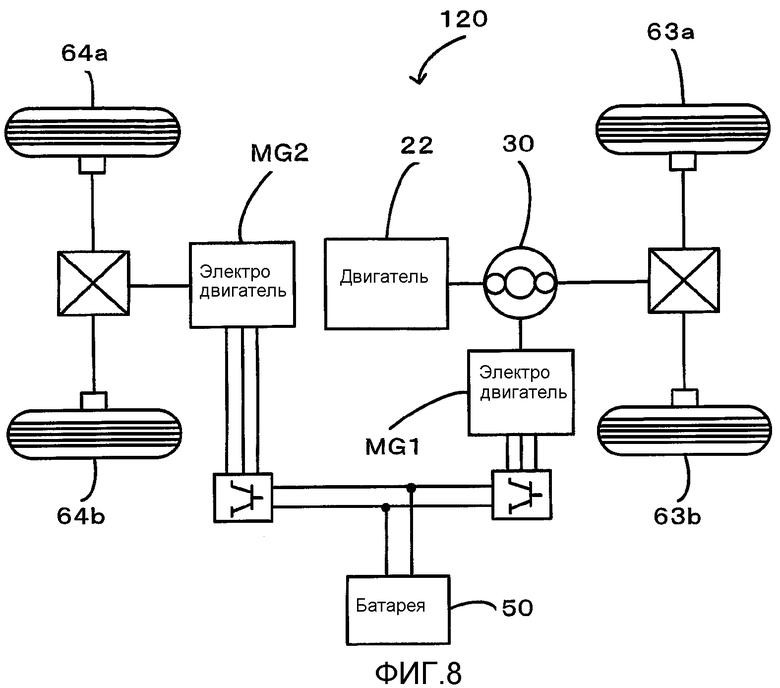
на фиг.8 - конфигурация другого гибридного транспортного средства согласно модифицированному примеру выполнения; и
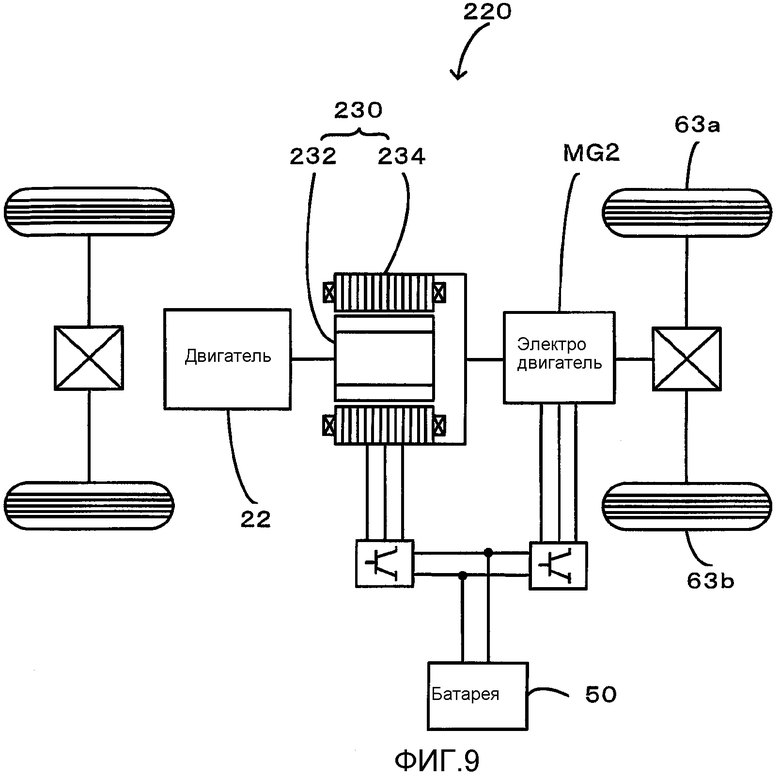
на фиг.9 - конфигурация еще одного гибридного транспортного средства согласно другому модифицированному примеру выполнения.
Наилучшие способы выполнения изобретения
Ниже приводится описание одного способа выполнения изобретения в качестве предпочтительного варианта выполнения. На фиг.1 схематично показана конструкция гибридного транспортного средства 20 с устройством выдачи мощности, установленном в нем, согласно одному варианту выполнения изобретения. Как показано на фиг.1, гибридное транспортное средство 20 согласно этому варианту выполнения включает двигатель 22, трехвальный механизм 30 интеграции и распределения мощности, который связан с коленчатым валом 26, действующим в качестве выходного вала двигателя 22, через демпфер 28, электродвигатель MG1, который соединен с механизмом 30 интеграции и распределения мощности и способен генерировать электрическую мощность, редуктор 35, который соединен с валом 32а зубчатого венца, действующим в качестве приводного вала, соединенного с механизмом 30 интеграции и распределения мощности, другой электродвигатель MG2, который соединен с редуктором 35, и гибридный электронный управляющий блок 70, который управляет всем устройством выдачи мощности.
Двигатель 22 является двигателем внутреннего сгорания, который использует углеводородное топливо, такое как бензин или светлый нефтепродукт, для выдачи мощности. Электронный блок 24 управления двигателя (называемый в последующем ECU двигателя) принимает сигналы из различных датчиков, которые измеряют рабочие параметры двигателя 22, и выполняет рабочее управление двигателем 22, например управление впрыском топлива, управление зажиганием и регулирование входного воздушного потока. Электронный управляющий блок 24 двигателя соединен с гибридным электронным управляющим блоком 70 для управления работой двигателя 22 в ответ на сигналы управления, передаваемые из гибридного электронного управляющего блока 70 при одновременной выдаче данных, относящихся к рабочим параметрам двигателя 22, в гибридный электронный управляющий блок 70 в соответствии с требованиями.
Механизм 30 интеграции и распределения мощности имеет солнечное зубчатое колесо 32, которое является наружным зубчатым колесом, зубчатый венец 32, который является внутренним зубчатым колесом и расположен концентрично солнечному зубчатому колесу 31, несколько шестерней 33, которые находятся в зацеплении с солнечным зубчатым колесом и с зубчатым венцом 32, и водило 34, которое удерживает несколько шестерней 33 так, чтобы обеспечивать их свободное вращение и их свободный поворот на соответствующих осях. А именно механизм 30 интеграции и распределения мощности выполнен в виде механизма планетарной передачи, который обеспечивает различное движение солнечного зубчатого колеса 31, зубчатого венца 32 и водила 34 в виде вращающихся элементов. Водило 34, солнечное зубчатое колесо 31 и зубчатый венец 32 в механизме 30 интеграции и распределения мощности соединены, соответственно, с коленчатым валом 26 двигателя 22, электродвигателем MG1 и редуктором 35 через вал 32а зубчатого венца. Когда электродвигатель MG1 действует в качестве генератора, то выходная мощность двигателя 22 и входная мощность через водило 34 распределяется в солнечное зубчатое колесо 31 и зубчатый венец 32 в соответствии с передаточным отношением. С другой стороны, когда электродвигатель MG1 действует в качестве электродвигателя, то выходная мощность двигателя 22 и входная мощность водила 34 комбинируется с выходной мощностью электродвигателя MG1 и входной мощностью через солнечное зубчатое колесо 31, и совокупная мощность выдается в зубчатый венец 32. Таким образом, выходная мощность зубчатого венца 32 передается в конечном итоге на приводные колеса 63а и 63b через передаточный механизм 60 и дифференциальную передачу 62 с вала 32а зубчатого венца.
Оба электродвигателя MG1 и MG2 являются известными синхронными двигателями-генераторами, которые приводятся в действие как генератор и как двигатель. Электродвигатели MG1 и MG2 передают электрическую мощность в и из батареи 50 через инвертеры 41 и 42. Электрические линии 54, которые соединяют инвертеры 41 и 42 с батареей 50, выполнены в виде шины положительного электрода и шины отрицательного электрода, совместно используемых инвертерами 41 и 42. Эта система обеспечивает потребление электрической мощности, генерируемой одним из электродвигателей MG1 и MG2, другим электродвигателем. Работой обоих электродвигателей MG1 и MG2 управляет электронный управляющий блок 40 электродвигателей (называемый в последующем ECU электродвигателей). Электронный управляющий блок 40 электродвигателей принимает различные сигналы, необходимые для управления работой электродвигателей MG1 и MG2, например сигналы из датчиков 43 и 44 измерения поворотного положения, которые измеряют поворотные положения роторов в электродвигателях MG1 и MG2, и фазы токов, подаваемых в электродвигатели MG1 и MG2, измеряемые датчиками тока (не изображены). Электронный управляющий блок 40 электродвигателей выдает переключательные управляющие сигналы в инвертеры 41 и 42. ECU 40 электродвигателей соединен с гибридным электронным управляющим блоком 70 для управления работой электродвигателей MG1 и MG2 в ответ на управляющие сигналы, передаваемые из гибридного электронного управляющего блока 70, при одновременной выдаче данных, относящихся к рабочим параметрам электродвигателей MG1 и MG2, в гибридный электронный управляющий блок 70 в соответствии с требованиями.
Управление батареей 50 выполняет электронный управляющий блок 52 батареи (называемый в последующем ECU батареи). ECU 52 батареи принимает различные сигналы, необходимые для управления батареей 50, например напряжение на зажимах с помощью датчика напряжения (не изображен), расположенного между зажимами батареи 50, зарядный и разрядный ток, измеряемый датчиком тока (не изображен), соединенным с выходным зажимом батареи 50, и температура батареи, измеряемая датчиком температуры (не изображен), прикрепленным к батарее 50. Электронный управляющий блок 52 батареи выдает данные, относящиеся к состоянию батареи 50 в гибридный электронный управляющий блок 70 через связь в соответствии с требованиями. Электронный управляющий блок 52 батареи вычисляет состояние зарядки батареи 50 на основе совокупного зарядного и разрядного тока, измеряемого датчиком тока, для управления батареей 50.
Гибридный электронный управляющий блок 70 выполнен в виде микропроцессора, включающего центральный процессор (ЦП) 72, ПЗУ 74, которое хранит программы обработки, ОЗУ 76 для временного хранения данных, не изображенный порт ввода-вывода и не изображенный порт связи. Гибридный электронный управляющий блок 70 принимает различные входные сигналы через порт ввода: сигнал зажигания из переключателя 80 зажигания, положение SP передачи из датчика 82 положения передачи, который обнаруживает текущее положение рычага 81 переключения передач, сигнал раскрыва Асс дроссельной заслонки из датчика 84 положения педали дроссельной заслонки, который измеряет степень нажатия на педаль 83 дроссельной заслонки, сигнал ВР положения педали тормоза из датчика 86 положения тормозной педали, который измеряет степень нажатия на тормозную педаль 85, и сигнал V скорости транспортного средства из датчика 88 скорости транспортного средства. Гибридный электронный управляющий блок 70 связан с ECU 24 двигателя, ECU 40 электродвигателей и ECU 52 батареи через порт связи для передачи различных сигналов управления и данных в и из ECU 24 двигателя, ECU 40 электродвигателей и ECU 52 батареи, как указывалось выше.
Выполненное таким образом гибридное транспортное средство 20 согласно данному варианту выполнения изобретения вычисляет требуемый крутящий момент, подлежащий выдачи на вал 32а зубчатого венца, действующего в качестве приводного вала, на основе наблюдаемых величин скорости V транспортного средства, раскрыва Асс дроссельной заслонки, которые соответствуют степени нажатия водителем на педаль 83 дроссельной заслонки. Выполняется управление двигателем 22 и электродвигателями MG1 и MG2 для выдачи требуемого уровня мощности, соответствующей вычисленному требуемому крутящему моменту для вала 32а зубчатого венца. Рабочее управление двигателем 22 и электродвигателями MG1 и MG2 избирательно осуществляет один из режимов, а именно режим привода с преобразованием крутящего момента, режим привода заряда-разряда или режим привода электродвигателя. Режим привода с преобразованием крутящего момента управляет работой двигателя 22 для выдачи величины мощности, эквивалентной требуемому уровню мощности, при одновременном приводе и управлении электродвигателями MG1 и MG2 для обеспечения преобразования крутящего момента всей выходной мощности двигателя 22 с помощью механизма 30 интеграции и распределения мощности и электродвигателей MG1 и MG2, и выдачи на вал 32а зубчатого венца. Режим привода заряда-разряда управляет работой двигателя 22 для выдачи величины мощности, эквивалентной сумме требуемого уровня мощности и величины электрической мощности, потребляемой для заряда батареи 50 или поставляемой за счет разряда батареи 50, при одновременном приводе и управлении электродвигателями MG1 и MG2 для обеспечения преобразования крутящего момента всей или части выходной мощности двигателя 22, эквивалентной требуемому уровню мощности, с помощью механизма 30 интеграции и распределения мощности и электродвигателей MG1 и MG2, и выдачи на вал 32а зубчатого венца одновременно с зарядом или разрядом батареи 50. Режим привода электродвигателя останавливает работу двигателя 22 и приводит в действие и управляет электродвигателем MG2 для выдачи величины мощности, эквивалентной требуемому уровню мощности, на вал 32а зубчатого венца.
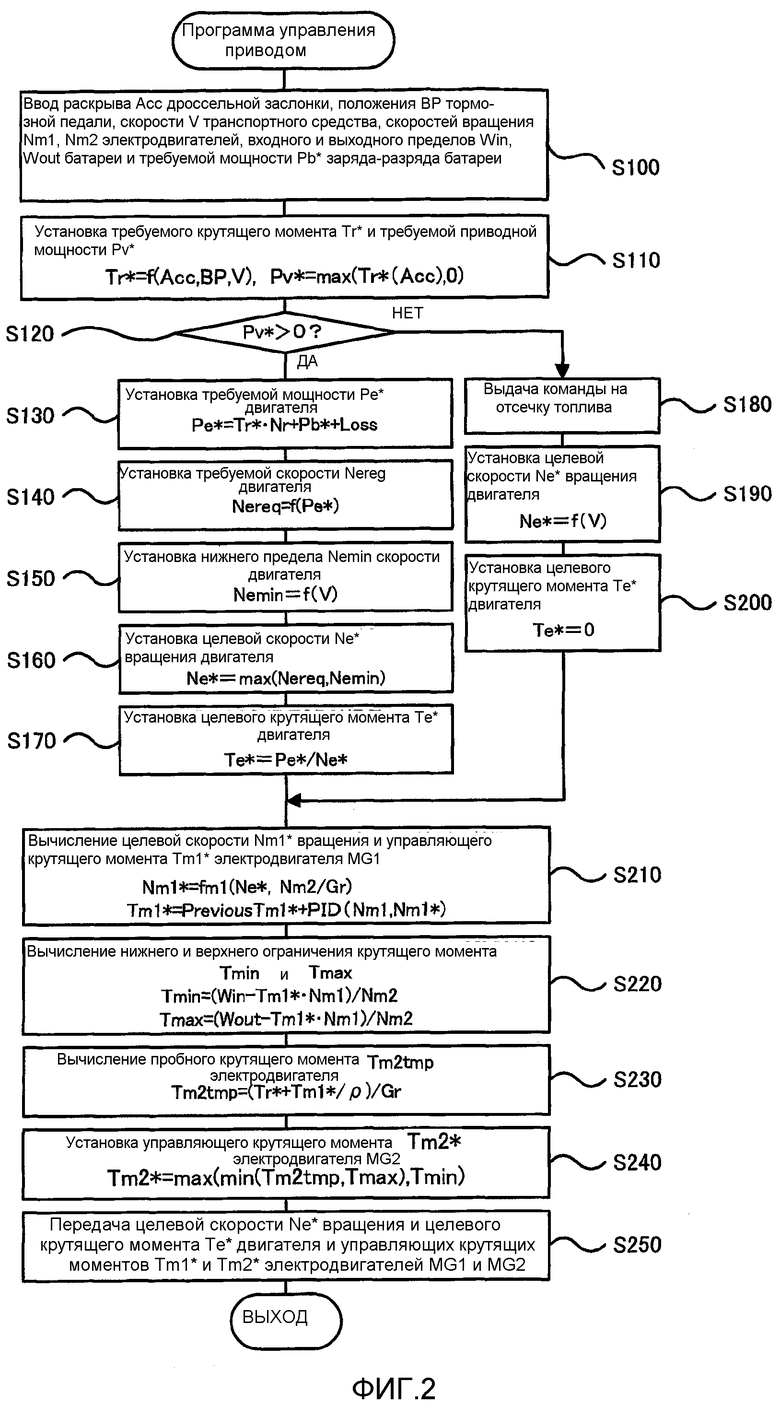
Ниже приводится описание работы гибридного транспортного средства 20 согласно варианту выполнения, имеющему указанную выше конфигурацию. На фиг.2 показана графическая схема подпрограммы управления приводом, выполняемой гибридным электронным управляющим блоком 70. Эта подпрограмма выполняется повторно с заданными интервалами времени (например, каждые несколько миллисекунд).
В подпрограмме управления приводом ЦП 72 гибридного электронного управляющего блока 70 сначала вводит различные данные, необходимые для управления, то есть раскрыв Асс дроссельной заслонки из датчика 84 положения педали дроссельной заслонки, скорость V транспортного средства из датчика 88 скорости транспортного средства, скорости Nm1 и Nm2 вращения электродвигателей MG1 и MG2, входной предел Win, выходной предел Wout и требуемая мощность Pb* заряда-разряда батареи 50 (стадия S100). Скорости Nm1 и Nm2 вращения электродвигателей MG1 и MG2 вычисляются из положений поворота соответствующих роторов в электродвигателях MG1 и MG2, измеряемых датчиками 43 и 44 измерения поворотного положения, и принимаются из ECU 40 электродвигателей с помощью связи. Входной предел Win и выходной предел Wout батареи 50 устанавливаются на основе температуры Tb батареи, измеряемой датчиком 51 температуры, и наблюдаемого текущего состояния заряда батареи 50, принимаемого из ECU 52 батареи с помощью связи. Требуемая мощность Pb* заряда-разряда батареи 50 устанавливается на основе текущего состояния заряда батареи 50, принимаемого из ECU 52 батареи с помощью связи.
После ввода данных ЦП 72 устанавливает требуемый крутящий момент Tr*, подлежащий выдаче на вал 32а зубчатого венца или приводной вал, соединенный с приводными колесами 63а и 63b, в качестве крутящего момента, необходимого для транспортного средства, и требуемую приводную мощность Pv*, необходимую для привода гибридного транспортного средства 20, на основе введенного раскрыва Асс дроссельной заслонки, введенного положения ВР тормозной педали и введенной скорости V транспортного средства (стадия S110). Конкретный процесс установки требуемого крутящего момента Tr* в этом варианте выполнения состоит в сохранении заранее изменений крутящего момента Tr* в зависимости от раскрыва Асс дроссельной заслонки, положения ВР тормозной педали и скорости V транспортного средства в виде карты установки требуемого крутящего момента в ПЗУ 74 и считывании с карты требуемого крутящего момента Tr*, соответствующего данному раскрыву Асс дроссельной заслонки, данному положению ВР тормозной педали и данной скорости V транспортного средства. Пример карты установки требуемого крутящего момента показан на фиг.3. Требуемая приводная мощность Pv* устанавливается равной большей из величин между величиной «0» и произведением требуемого крутящего момента Tr*, который зависит от раскрыва Асс дроссельной заслонки, и скорости Nr вращения вала 32а зубчатого венца. Скорость Nr вращения вала 32а зубчатого венца получается посредством умножения скорости V транспортного средства на коэффициент k преобразования или же посредством деления скорости Nm2 вращения электродвигателя MG2 на передаточное отношение Gr редуктора 35.
Затем требуемую приводную мощность Pv* сравнивают с величиной «0». Когда требуемая приводная мощность Pv* равна 0, то требуемый крутящий момент Tr* равен нулю или имеет отрицательное значение. Это означает, что нет потребности в выходной мощности двигателя 22, что позволяет останавливать двигатель 22, как будет описано ниже. Когда требуемая приводная мощность Pv* больше 0 на стадии S120, то необходима выдача мощности из двигателя 22. Соответственно, вычисляется требуемая мощность Pe* двигателя, подлежащая выдаче из двигателя 22, в виде суммы произведения требуемого крутящего момента Tr* и скорости Nr вращения вала 32а зубчатого венца, требуемой мощности Pb* заряда-разряда батареи 50 и возможных потерь (стадия S130). Требуемая скорость Nereg двигателя устанавливается в качестве скорости вращения двигателя 22 в эффективной точке привода, которая обеспечивает эффективную выдачу требуемой мощности Pe* двигателя из двигателя 22 (стадия S140). Конкретный процесс установки требуемой скорости Nereg двигателя в этом варианте выполнения состоит в сохранении заранее в ПЗУ 74 изменения требуемой скорости Nereg двигателя в зависимости от требуемой мощности Pe* двигателя в виде карты установки требуемой скорости двигателя и считывании с карты требуемой скорости Nereg двигателя, соответствующей данной требуемой мощности Pe* двигателя. Пример карты установки требуемой скорости двигателя показан на фиг.4. Точка эффективного привода электродвигателя 22 (произведение скорости Ne вращения и крутящего момента Те) обеспечивает эффективную выдачу требуемой мощности Pe* двигателя может быть представлена рабочей линией на карте зависимости крутящего момента от скорости вращения, как показано на фиг.5. Комбинация скорости вращения и крутящего момента на пересечении кривой постоянной требуемой мощности Pe* двигателя (показана прерывистой линией) и рабочей линии дает точку эффективного привода двигателя 22, обеспечивающую эффективную выдачу требуемой мощности Pe* двигателя.
ЦП 72 последовательно устанавливает нижний предел Nemin скорости вращения в качестве скорости вращения двигателя 22 в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности из двигателя 22 для привода с постоянной скоростью V гибридного транспортного средства 20 (стадия S150). Конкретный пример установки нижнего предела Nemin скорости вращения двигателя в данном варианте выполнения состоит в сохранении заранее в ПЗУ 74 изменения нижнего предела Nemin скорости вращения двигателя в зависимости от скорости V транспортного средства в виде карты установки нижнего предела скорости вращения двигателя и считывании с карты нижнего предела Nemin скорости вращения двигателя, соответствующего скорости V транспортного средства. Пример карты установки нижнего предела скорости вращения двигателя показан на фиг.6. Опорная скорость Vref транспортного средства, показанная на фиг.6, установлена в качестве критерия для определения требования прерывистой работы двигателя 22.
Затем ЦП 72 устанавливает большее значение из требуемой скорости Nereg двигателя и нижнего предела Nemin скорости вращения двигателя в качестве целевой скорости Ne* вращения двигателя 22 (стадия S160) и выполняет деление требуемой мощности Pe* двигателя на целевую скорость Ne* вращения с целью вычисления целевого крутящего момента Те* двигателя 22 (стадия S170). Установка большего значения из требуемой скорости Nereg двигателя и нижнего предела Nemin скорости вращения двигателя в качестве целевой скорости Ne* вращения двигателя 22 помогает обеспечивать более быструю реакцию на резкое увеличение требуемой мощности Pe* двигателя. В одном примере водитель может нажать на педаль 83 дроссельной заслонки в состоянии торможения с некоторым увеличением требуемой приводной мощности Pv*, в то время как гибридное транспортное средство 20 движется с относительно высокой скоростью. В таких условиях требуемая скорость Nereg двигателя меньше нижнего предела Nemin скорости вращения двигателя. Обычно увеличение мощности двигателя за счет увеличения лишь крутящего момента получают внутри более короткого периода времени, чем увеличение мощности двигателя за счет увеличения лишь скорости вращения. Это приводит к меньшему времени, требуемому для увеличения входного потока воздуха и величины впрыска топлива, по сравнению с временем, требуемым для увеличения скорости вращения вращающейся системы двигателя 22. А именно двигатель 22, работающий на нижнем пределе Nemin скорости двигателя, который выше, чем требуемая скорость Nereg двигателя, имеет более быструю реакцию на требование увеличения выходной мощности двигателя 22.
ЦП 72 последовательно вычисляет целевую скорость Nm1* вращения электродвигателя MG1 из целевой скорости Ne* вращения двигателя 22, скорость Nr (=Nm2/Gr) вала 32а зубчатого венца и передаточное отношение ρ механизма 30 интеграции и распределения мощности в соответствии с приведенным ниже уравнением (1) при одновременном вычислении управляющего крутящего момента Tm1* электродвигателя MG1 из вычисленной целевой скорости Nm1* вращения и текущей скорости Nm1 вращения электродвигателя MG1 в соответствии с приведенным ниже уравнением (2) (стадия S210):


Уравнение (1) является динамическим относительным выражением вращающихся элементов, включенных в механизм 30 интеграции и распределения мощности. На фиг.7 показана номограмма динамического изменения крутящего момента в зависимости от скорости вращения соответствующих вращающихся элементов, включенных в механизм 30 интеграции и распределения мощности. Левая ось S представляет скорость вращения солнечного зубчатого колеса 31, которая эквивалентна скорости Nm1 вращения электродвигателя MG1. Средняя ось С представляет скорость вращения водила 34, которая эквивалентна скорости Ne вращения двигателя 22. Правая ось R представляет скорость Nr вращения зубчатого венца 32, которую получают посредством умножения скорости Nm2 вращения электродвигателя MG2 на передаточное отношение Gr редуктора 35. Уравнение (1) легко выводится из этой номограммы, показанной на фиг.7. Две толстые стрелки на оси R показывают, соответственно, крутящий момент, который передается на вал 32а зубчатого венца, когда крутящий момент Te* выдается из двигателя 22 при устойчивой работе в специальной приводной точке целевой скорости Ne* вращения и целевого крутящего момента Те*, и крутящий момент, который прикладывается к валу 32а зубчатого венца через редуктор 35, когда из электродвигателя MG2 выдается крутящий момент Tm2*. Уравнение (2) является относительным выражением управления обратной связи для привода и вращения электродвигателя MG1 с целевой скоростью Nm1* вращения. В приведенном выше уравнении (2) k1 во втором члене и k2 в третьем члене на правой стороне обозначают, соответственно, усиление пропорционального члена и усиление интегрального члена.
После вычисления целевой скорости Nm1* вращения и управляющего крутящего момента Tm1* электродвигателя MG1 ЦП 72 вычисляет нижнее ограничение Tmin крутящего момента и верхнее ограничение Tmax крутящего момента в качестве минимального и максимального выходного крутящего момента электродвигателя MG2 в соответствии с приведенными ниже уравнениями (3) и (4) (стадия S220):


Нижнее ограничение Tmin крутящего момента и верхнее ограничение Tmax крутящего момента задаются, соответственно, посредством деления разницы между входным пределом Win батареи 50 и потребляемой мощностью (генерируемой мощностью) электродвигателя MG1, которая равна произведению управляющего момента Tm1* и входной текущей скоростью Nm1 вращения электродвигателя MG1, и разницы между выходным пределом Wout батареи 50 и потребляемой мощностью (генерируемой мощностью) электродвигателя MG1, на входную текущую скорость Nm2 вращения электродвигателя MG2. Затем ЦП 72 вычисляет пробный крутящий момент Tm2tmp электродвигателя, подлежащий выдачи из электродвигателя MG2, из требуемого крутящего момента Tr*, управляющего крутящего момента Tm1* электродвигателя MG1, передаточного отношения ρ механизма 30 интеграции и распределения мощности и передаточного отношения Gr редуктора 35 в соответствии с приведенным ниже уравнением (5) (стадия S230):

ЦП 72 ограничивает пробный крутящий момент Tm2tmp электродвигателя диапазоном между нижним ограничением Tmin крутящего момента и верхним ограничением Tmax крутящего момента для установки управляющего крутящего момента Tm2* электродвигателя MG2 (стадия S240). Такая установка управляющего крутящего момента Tm2* электродвигателя MG2 ограничивает требуемый крутящий момент Tr*, подлежащий выдаче на вал 32а зубчатого венца или приводной вал, внутри диапазона между входным пределом Win и выходным пределом Wout батареи 50. Уравнение (5) легко выводится из номограммы, показанной на фиг.7.
ЦП 72 передает величины целевой скорости Ne* вращения и целевого крутящего момента Те* двигателя 22 в ECU 24 двигателя при одновременной передаче величин управляющих крутящих моментов Tm1* и Tm2* электродвигателей MG1 и MG2 в ECU 40 электродвигателей (стадия S250) перед выходом из подпрограммы управления приводом. ECU 24 двигателя принимает величины целевой скорости Ne* вращения и целевого крутящего момента Те* и выполняет управление впрыском топлива и управление зажиганием двигателя 22 для работы двигателя 22 в заданной приводной точке целевой скорости Ne* вращения и целевого крутящего момента Те*. ECU 40 электродвигателей принимает величины управляющих крутящих моментов Tm1* и Tm2* и выполняет управление переключательными элементами, включенными в соответствующие инвертеры 41 и 42, для работы электродвигателя MG1 с управляющим крутящим моментом Tm1*, а электродвигателя MG2 - с управляющим крутящим моментом Tm2*.
Если на стадии S120 определяется, что требуемая выходная мощность Pv* равна нулю на стадии S120, то ЦП 72 определяет отсутствие необходимости выдачи мощности из двигателя 22 и выдает команду на прерывание подачи топлива в двигатель 22 (стадия S180). В соответствии с конкретным процессом гибридный электронный управляющий блок 70 передает через порт связи сигнал управления на прекращение подачи топлива в ECU 24 двигателя. Затем ЦП 72 устанавливает нижний предел Nemin скорости двигателя, который считывается в соответствии со скоростью V транспортного средства с карты установки нижнего предела скорости вращения двигателя, в качестве целевой скорости Ne* вращения двигателя 22 (стадия S190) и устанавливает управляющий крутящий момент Те* двигателя 22, равным 0 (стадия S200). Затем ЦП 72 выполняет обработку в соответствии со стадиями S210-S240 для установления управляющих крутящих моментов Tm1*и Tm2* электродвигателей MG1 и MG2 и передает их в ECU 24 двигателя и в ECU 40 электродвигателей (стадия S250) перед выходом из подпрограммы управления приводом. Когда скорость V транспортного средства меньше опорной скорости Vref транспортного средства, то нижний предел Nemin скорости вращения двигателя устанавливается равным 0. В соответствии с этим двигатель 22 останавливается и не вращается.
Водитель может нажать на педаль 83 дроссельной заслонки в состоянии отсутствия ускорения, в то время как гибридное транспортное средство 20 движется с относительно высокой скоростью. В состоянии отсутствия ускорения требуемая приводная мощность Pv* равна 0. В соответствии с этим прекращается подача топлива в двигатель 22 и он вращается на нижнем пределе Nemin скорости вращения двигателя. В этих условиях нажатие водителем педали 83 дроссельной заслонки прекращает остановку подачи топлива, мгновенно возобновляет входной поток воздуха и впрыск топлива для выдачи крутящего момента из двигателя 22. Двигатель 22 вращается на нижнем пределе Nemin скорости вращения двигателя, что приводит к эффективной выдаче двигателем 22 требуемой мощности для движения с постоянной скоростью гибридного транспортного средства 20, равной текущей скорости V транспортного средства. Простое регулирование входного потока воздуха и количества впрыскиваемого топлива мгновенно позволяет двигателю 22 эффективно выдавать требуемую мощность для движения с постоянной скоростью гибридного транспортного средства 20.
Точка привода двигателя 22 изменяется вдоль рабочей линии (см. фиг.5), которая представляет собой продолжение точек эффективного привода двигателя от специальной точки привода, которая обеспечивает эффективную выдачу двигателем 22 требуемой мощности для движения с постоянной скоростью. Это управление обеспечивает более быструю реакцию двигателя 22 для выдачи требуемой мощности, по сравнению с обычным управлением работой двигателя 22 при низкой скорости вращения или остановке двигателя 22. В конфигурации гибридного транспортного средства 20 согласно данному варианту выполнения, как четко показано при установке пробного крутящего момента Tm2tmp на стадии S230, выходной крутящий момент электродвигателя MG2, приводимого в действие электропитанием из батареи 50, компенсирует замедленную реакцию двигателя 22. Быстрая выдача требуемой мощности из двигателя 22 уменьшает разряд электрической энергии батареи 50 и желательным образом уменьшает нагрузку батареи 50. Таким образом, эта система эффективно предотвращает преждевременное старение батареи 50, которое ускоряется при повторяющихся зарядах и разрядах относительно высоких электрических мощностей.
Как указывалось выше, гибридное транспортное средство 20 согласно данному варианту выполнения приводит в действие двигатель 22 со скоростью вращения не меньше нижнего предела Nemin скорости вращения двигателя, соответствующего скорости V транспортного средства, для улучшения реакции двигателя 22 на изменение требуемой выходной мощности. Управление согласно данному варианту выполнения желательным образом уменьшает недостаток требуемой приводной мощности за счет задержанной реакции двигателя 22, что понижает требуемый уровень разряда батареи 50 и уменьшает нагрузку батареи 50. Уменьшенные уровни заряда и разряда желательным образом предотвращают преждевременное старение батареи 50, которое ускоряется при повторяющихся зарядах и разрядах относительно высоких электрических мощностей. Более быстрая реакция двигателя 22 также обеспечивает быстрый сдвиг точки привода двигателя 22 в точки эффективного привода двигателя вдоль рабочей линии. В случае отсутствия требования на выдачу мощности из двигателя 22 при требуемой приводной мощности Pv*, равной 0, процесс управления согласно данному варианту выполнения останавливает впрыск топлива в двигатель 22 и тем самым предпочтительно улучшает потребление топлива.
Гибридное транспортное средство 20 согласно данному варианту выполнения устанавливает нижний предел Nemin скорости двигателя на специальную скорость вращения двигателя 22 в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности для движения с постоянной скоростью гибридного транспортного средства 20 на плоской дорожной поверхности со скоростью V транспортного средства. Однако этот уровень скорости вращения не является существенным, и можно устанавливать нижний предел Nemin скорости двигателя немного меньше или немного больше, чем специальная скорость вращения в специальной точке привода.
Гибридное транспортное средство 20 согласно данному варианту выполнения устанавливает большую величину между величиной 0 и величиной произведения требуемого крутящего момента Tr*, который зависит от раскрыва Асс дроссельной заслонки, и скорости Nr вращения вала 32а зубчатого венца, в качестве требуемой приводной мощности Pv*. Согласно одной возможной модификации можно устанавливать требуемую приводную мощность Pv* в качестве произведения требуемого крутящего момента Tr*, который зависит от раскрыва Асс дроссельной заслонки, и скорости Nr вращения вала 32а зубчатого венца. Согласно другой возможной модификации можно устанавливать требуемую приводную мощность Pv* в качестве требуемого крутящего момента Tr*, который зависит от положения тормозной педали ВР. В таких модифицированных структурах управление отсечкой топлива зависит от того, имеет ли требуемая приводная мощность Pv* положительный уровень или нет.
Гибридное транспортное средство 20 согласно данному варианту выполнения приводит двигатель 22 в ответ на требуемую приводную мощность Pv*, превышающую 0, при одновременной отсечке подачи топлива в двигатель 22 в ответ на требуемую приводную мощность Pv*, равную 0. В одной возможной модификации двигатель 22 может приводиться в ответ на требуемую приводную мощность Pv*, превышающую заданное пороговое значение Pref (больше 0), при одновременной отсечке подачи топлива в двигатель 22 в ответ на требуемую приводную мощность Pv*, меньшую заданного порогового значения Pref.
В гибридном транспортном средстве 20 согласно данному варианту выполнения мощность электродвигателя MG2 подвергается изменению передачи в редукторе 35 и выдается на вал 32а зубчатого венца. В одной возможной модификации, показанной как гибридное транспортное средство 120 на фиг.8, мощность электродвигателя MG2 может выдаваться на другую ось (то есть ось, связанную с колесами 64а, 64b), которая отлична от оси, соединенной с валом 32а зубчатого венца (то есть оси, связанной с колесами 63а и 63b).
В гибридном транспортном средстве 20 согласно данному варианту выполнения мощность двигателя 22 выдается через механизм 30 интеграции и распределения мощности на вал 32а зубчатого венца, действующего в качестве приводного вала, связанного с приводными колесами 63а и 63b. В другой возможной модификации, показанной на фиг.9, гибридное транспортное средство 220 может иметь электродвигатель 230 с парным ротором, который имеет внутренний ротор 232, соединенный с коленчатым валом 26 двигателя 22, и наружный ротор 234, соединенный с приводным валом, для выдачи мощности на приводные колеса 63а, 63b и передачи части выходной мощности из двигателя 22 на приводной вал, при одновременном преобразовании остающейся части мощности в электрическую энергию.
Указанные выше варианты выполнения следует рассматривать во всех аспектах как имеющие иллюстративный, но не ограничивающий характер. Возможны различные модификации, изменения и альтернативные решения без отхода от объема и идеи главных характеристик данного изобретения. Объем и идея данного изобретения задаются прилагаемой формулой изобретения, а не предшествующим описанием.
Промышленная применимость
Технологию данного изобретения желательно применять в промышленности изготовления гибридных транспортных средств и устройств выдачи мощности.
Изобретение относится к гибридному транспортному средству и может быть применено в машиностроении. Гибридное транспортное средство содержит двигатель внутреннего сгорания, механизм ввода и вывода электрической и механической мощности, электродвигатель, блок аккумуляторов, модуль регулирования требуемой приводной мощности, модуль измерения скорости, модуль регулирования нижнего предела скорости вращения, управляющий модуль. Устройство выдачи мощности содержит двигатель внутреннего сгорания, механизм ввода и вывода электрической и механической мощности, электродвигатель, блок аккумуляторов, модуль регулирования требуемой приводной мощности, модуль измерения скорости, модуль регулирования нижнего предела скорости вращения, управляющий модуль. Способ управления гибридным транспортным средством заключается в установлении требуемой приводной мощности, нижнего предела скорости вращения, а также в управлении двигателем внутреннего сгорания, механизмом ввода-вывода электрической и механической мощности. Технический результат заключается в повышении эффективности использования энергии гибридного транспортного средства. 3 н. и 5 з.п. ф-лы, 9 ил.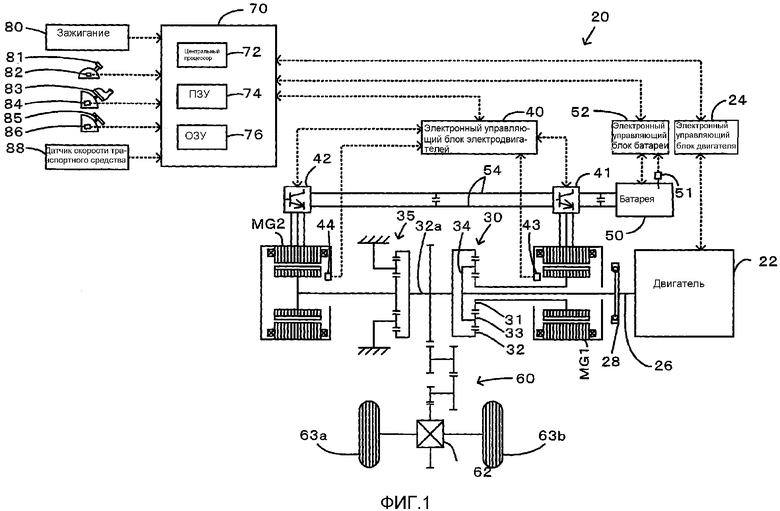
двигатель внутреннего сгорания;
механизм ввода и вывода электрической мощности и механической мощности, который соединен с выходным валом двигателя внутреннего сгорания и с приводным валом, связанным с осью гибридного транспортного средства, и принимает мощность с входного вала и приводного вала и выдает мощность на выходной вал и приводной вал через ввод-вывод электрической мощности и механической мощности;
электродвигатель, который принимает или выдает мощность на одну или другую ось;
блок аккумуляторов, который передает электрическую мощность в механизм ввода-вывода электрической мощности и механической мощности и электродвигатель и получает ее от них;
модуль регулирования требуемой приводной мощности, который устанавливает требуемую приводную мощность, необходимую для привода указанного гибридного транспортного средства;
модуль измерения скорости транспортного средства, который измеряет скорость указанного гибридного транспортного средства;
модуль регулирования нижнего предела скорости вращения, который устанавливает нижний предел скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости транспортного средства;
и
управляющий модуль, который управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не ниже, чем установленный нижний предел скорости вращения, и для привода гибридного транспортного средства с мощностью, соответствующей установленной требуемой приводной мощности, при этом указанный модуль регулирования нижнего предела скорости вращения устанавливает нижний предел скорости вращения на скорость вращения не меньше удельной скорости вращения двигателя внутреннего сгорания в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности двигателя внутреннего сгорания для привода с постоянной скоростью указанного гибридного транспортного средства на по существу плоской дорожной поверхности с измеренной скоростью транспортного средства.
двигатель внутреннего сгорания;
механизм ввода-вывода электрической мощности и механической мощности, который соединен с выходным валом двигателя внутреннего сгорания и с приводным валом и вводит и выдает мощность с и на выходной вал и приводной вал через ввод и вывод электрической мощности и механической мощности;
электродвигатель, который принимает и выдает мощность с и на приводной вал;
блок аккумуляторов, который передает электрическую мощность в и из механизма ввода-вывода электрической мощности и механической мощности и электродвигателя;
модуль регулирования требуемой мощности, который устанавливает требуемую мощность, необходимую для приводного вала;
модуль измерения скорости вращения, который измеряет скорость вращения приводного вала;
модуль регулирования нижнего предела скорости вращения, который устанавливает нижний предел скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости вращения; и
управляющий модуль, который управляет двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не меньше установленного нижнего предела скорости вращения и для выдачи мощности, соответствующей установленной требуемой мощности, на приводной вал, при этом указанный модуль регулирования нижнего предела скорости вращения устанавливает нижний предел скорости вращения на скорость вращения не меньше удельной скорости вращения двигателя внутреннего сгорания в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности двигателя внутреннего сгорания для привода с постоянной скоростью указанного гибридного транспортного средства на по существу плоской дорожной поверхности с измеренной скоростью транспортного средства.
при этом согласно способу
устанавливают требуемую приводную мощность, необходимую для привода гибридного транспортного средства;
устанавливают нижний предел скорости вращения, который представляет минимальную допустимую скорость вращения двигателя внутреннего сгорания, соответствующую измеренной скорости транспортного средства;
и
управляют двигателем внутреннего сгорания, механизмом ввода-вывода электрической мощности и механической мощности и электродвигателем для привода двигателя внутреннего сгорания со скоростью вращения не меньше установленного нижнего предела скорости вращения и для привода указанного гибридного транспортного средства с мощностью, соответствующей установленной требуемой приводной мощности, причем используют модуль регулирования нижнего предела скорости вращения, который устанавливает нижний предел скорости вращения на скорость вращения не меньше удельной скорости вращения двигателя внутреннего сгорания в специальной точке привода, которая обеспечивает эффективную выдачу требуемой мощности двигателя внутреннего сгорания для привода с постоянной скоростью указанного гибридного транспортного средства на по существу плоской дорожной поверхности с измеренной скоростью транспортного средства.
| JP 9222064 А, 26.08.1997 | |||
| Комбинированная приводная установка | 1989 |
|
SU1684106A1 |

