ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к гибридному транспортному средству, оборудованному двигателем внутреннего сгорания, электродвигателем, устройством накопления электроэнергии, и автоматической трансмиссией.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Традиционно, известно гибридное транспортное средство, оборудованное автоматической трансмиссией, имеющей первый входной вал, который избирательно соединен с выходным валом через множество зубчатых передач, устанавливающих ступени переключения передач, и который подключен к электродвигателю, второй входной вал, который избирательно соединен с выходным валом через множество зубчатых передач, устанавливающих различные ступени скоростей, первое сцепление, допускающее переключение между состоянием трансмиссии, передающим движущую силу двигателя внутреннего сгорания на первый входной вал и разомкнутое состояние, которое отключает трансмиссию, и второе сцепление, допускающее переключение между состоянием трансмиссии, передающим движущую силу двигателя внутреннего сгорания на второй входной вал и разомкнутое состояние, которое отключает трансмиссию (например, ссылка на патентный документ 1 и 2). В автоматической трансмиссии возможен запуск двигателя внутреннего сгорания посредством движущей силы электродвигателя.
В последнее время, для улучшения потребления топлива и рабочих характеристик, влияющих на окружающую среду, предлагается осуществлять управление остановкой холостого хода автоматической остановкой двигателя внутреннего сгорания во время остановки транспортного средства.
В патентном документе 2, раскрывается, что запуск двигателя внутреннего сгорания разрешен, во время движения EV только движущей силой электродвигателя (двигателя), в случае, когда скорость транспортного средства равна или больше, чем определенная скорость транспортного средства. Дополнительно, в патентном документе 2, раскрывается, что во время остановки транспортного средства, оно переключается из запуска EV в запуск посредством движущей силы двигателя внутреннего сгорания, в случае, когда оцененное состояние сохранения электроэнергии устройства накопления электроэнергии (аккумуляторной батареи) падает ниже предварительно установленного определенного значения или в случае, когда оцененный наклон поверхности дороги превышает предварительно установленный определенный наклон.
Ссылка на предшествующий уровень техники
Патентный документ
Патентный документ 1:
Выложенный патент Японии № 2002-89594
Патентный документ 2:
Выложенный патент Японии № 2009-166567
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
В транспортном средстве, оборудованном автоматической трансмиссией согласно патентным документам 1 и 2, в случае, когда осуществляется управление остановкой холостого хода, есть опасения, что электродвигатель не может быть приводящим в движение и транспортное средство не может начать движение, когда оставшаяся емкость устройства накопления электроэнергии, которое подает электроэнергию на электродвигатель, мала.
Дополнительно, в гибридном транспортном средстве оборудованном автоматической трансмиссией согласно патентным документам 1 и 2, когда оставшаяся емкость устройства накопления электроэнергии, которое подает электрическую энергию на электродвигатель, становится мала во время движения EV, есть опасения, что становится невозможным получать движущую силу, требуемую для движения транспортного средства, поскольку двигатель внутреннего сгорания не может быть запущен.
Настоящее изобретение нацелено на предоставление гибридного транспортного средства, способного надежно запускать в движение транспортное средство, при управлении остановкой холостого хода, даже когда оставшаяся емкость устройства накопления электроэнергии, которое подает электроэнергию на электродвигатель, мала.
Дополнительно, настоящее изобретение нацелено на предоставление гибридного транспортного средства, способного надежно предотвращать ситуацию, когда движущая сила двигателя внутреннего сгорания не может быть получена во время движения EV.
Настоящим изобретением является гибридное транспортное средство, содержащее: двигатель внутреннего сгорания, электродвигатель, устройство накопления электроэнергии, предоставляющее и принимающее электрическую энергию к и из электродвигателя; автоматическую трансмиссию, включающую в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который подключен к электродвигателю, второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, и присоединяющий элемент, который избирательно соединяет первый входной вал или второй входной вал к выходному валу, причем движущая выходная мощность двигателя внутреннего сгорания и электродвигателя переключается и передается на выходной вал; элемент различения зоны, который распознает оставшуюся емкость устройства накопления электроэнергии и различает на основе детектированной оставшейся емкости, стандартную зону, зону ограниченного заряда, в которой оставшаяся емкость меньше, чем в стандартной зоне, зону запрещенного разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда; и элемент управления остановкой холостого хода, который управляет так, чтобы осуществлять зарядку устройства накопления электроэнергии, когда создается запрос остановки холостого хода, в случае, когда зона, различенная элементом различения зоны. является зоной ограниченного разряда или зоной запрещенного разряда, установкой первого элемента переключения в соединенное состояние наряду с сохранением приведения в движение от двигателя внутреннего сгорания так, чтобы вращать первый входной вал и после этого, когда создается запрос остановки холостого хода в случае, когда различенная, посредством элемента различения зоны, зона является стандартной зоной, тогда управляет запуском в движение транспортного средства наряду с установкой двигателя внутреннего сгорания в остановленное состояние и электродвигателя в состояние приведения в движение, в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда, тогда управляет запуском в движение транспортного средства приведением в движение от электродвигателя наряду с продолжением приведения в движение от двигателя внутреннего сгорания и сохранением первого элемента переключения в разомкнутом состоянии и в случае, когда зона, различенная элементом различения зоны, является зоной запрещенного разряда, тогда управляет запуском в движение транспортного средства продолжением приведения в движение от двигателя внутреннего сгорания и установкой первого элемента переключения в соединенное состояние.
Согласно гибридному транспортному средству настоящего изобретения, элемент управления остановкой холостого хода осуществляет соответствующее управление остановкой холостого хода, согласно зоны, различенной элементом различения зоны, на основе детектированной оставшейся емкости устройства накопления электроэнергии так, что становится возможным надежно запускать в движение транспортное средство.
То есть, в случае, когда зона ограниченного разряда или зона запрещенного разряда, когда оставшаяся емкость устройства накопления электроэнергии мала, элемент управления остановкой холостого хода обеспечивает продолжение приведения в движение двигателя внутреннего сгорания, даже когда вырабатывается запрос на остановку холостого хода. После этого, когда вырабатывается запрос на остановку холостого хода, в случае, когда это зона запрещенного разряда, транспортное средство осуществляет запуск продолжением приведения в движение от внутреннего сгорания и установкой первого элемента переключения в соединенное состояние. После этого, даже в зоне разряда, неспособной возбуждать электродвигатель электроэнергией из устройства накопления электроэнергии, становится возможным осуществлять движение транспортного средства посредством движущей силы двигателя внутреннего сгорания, установкой первого элемента переключения в соединенное состояние.
Дополнительно, в случае, когда зона ограничения разряда, когда вырабатывается запрос на остановку холостого хода, элемент управления остановкой холостого хода продолжает приводить в движение от двигателя внутреннего сгорания и осуществляет запуск транспортного средства приведением в движение от электродвигателя наряду с сохранением первого устройства переключения в разомкнутом состоянии. После этого, даже когда оставшаяся емкость устройства накопления электроэнергии уменьшена и соответствует зоне ограничения разряда после запуска в движение транспортного средства, становится возможным осуществлять движение транспортного средства посредством движущей силы двигателя внутреннего сгорания, установкой первого элемента переключения в соединенное состояние.
Дополнительно, в случае, когда имеется стандартная зона, когда вырабатывается запрос на остановку холостого хода, элемент управления остановкой холостого хода осуществляет запуск в движение транспортного средства, установкой двигателя внутреннего сгорания в остановленное состояние и электродвигателя в состояние приведения в движение. Поступая таким образом, становится возможным запустить транспортное средство без сопровождающего потребления топлива двигателем внутреннего сгорания.
Дополнительно, в случае, когда имеется зона ограниченного разряда или зона запрещенного разряда, в которой оставшаяся емкость устройства накопления электроэнергии мала, когда вырабатывается запрос на остановку холостого хода, элемент управления остановкой холостого хода управляет так, чтобы осуществлять зарядку устройства накопления электроэнергии, установкой первого элемента переключения в соединенное состояние наряду с продолжением приведения в движение от двигателя внутреннего сгорания, и обеспечивать вращение первого входного вала. После этого становится возможным увеличивать оставшуюся емкость устройства накопления электроэнергии во время остановки транспортного средства.
Дополнительно, в гибридном транспортном средстве настоящего изобретения предпочтительно, чтобы присоединяющий элемент включал в себя первый избирающий элемент, который избирательно соединяет первый входной вал и выходной вал, второй избирающий элемент, который избирательно соединяет второй входной вал и выходной вал и дифференциальный вращательный механизм, который сконфигурирован из первого вращательного элемента, который подключен к первому входному валу, второго вращательного элемента, который подключен к выходному валу, и третьего вращательного элемента, представленного с элементом блокировки, так, чтобы обеспечить возможность дифференциального взаимного вращения, и элемент управления остановкой холостого хода управляет так, чтобы осуществлять заряд устройства накопления электроэнергии, когда вырабатывается запрос на остановку холостого хода, в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда или зоной запрещенного заряда, установкой первого элемента переключения в соединенное состояние наряду с сохранением приведения в движение от двигателя внутреннего сгорания и вращения первого входного вала, установкой третьего вращательного элемента в разблокированное состояние блокировки элементом блокировки и после этого, когда вырабатывается запрос на остановку холостого хода, управлять так, чтобы запускать в движение транспортное средство после установки элементом блокировки третьего вращательного элемента в заблокированное состояние.
В этом случае, становится возможным осуществлять переход из состояния зарядки устройства накопления электроэнергии, во время остановки транспортного средства, в состояние запуска транспортного средства, посредством наличия или отсутствия состояния блокировки третьего вращательного элемента посредством элемента блокировки так, чтобы конструкция автоматической трансмиссии и управление ей становилось простым.
Дополнительно, в гибридном транспортном средстве настоящего изобретения является предпочтительным, что транспортное средство дополнительно содержит элемент детектирования наклона, который детектирует наклон поверхности дороги, с которым контактирует транспортное средство, причем присоединяющий элемент включает в себя первый избирающий элемент, который избирательно соединяет первый входной вал, и выходной вал, второй избирающий элемент, который избирательно соединяет второй входной вал и выходной вал и дифференциальный вращательный механизм, который сконфигурирован из первого вращательного элемента, который подключен к первому входному валу, второй вращательный элемент, который подключен к выходному валу, и третий вращательный элемент, предусмотренный с элементом блокировки так, чтобы обеспечивать возможность дифференциального взаимного вращения и элемент управления остановкой холостого хода управляет так, чтобы осуществлять зарядку устройства накопления электроэнергии, когда вырабатывается запрос на остановку холостого хода, в случае, когда наклон, детектированный элементом детектирования наклона, превышает пороговое значение, установкой первого элемента переключения в соединенное состояние наряду с продолжением приведения в движение от внутреннего сгорания и посредством вращения первого входного вала, и после этого, когда вырабатывается запрос остановки холостого хода, управляет, чтобы осуществить запуск транспортного средства посредством приведения в движение от электродвигателя, наряду с продолжением приведения в движение от внутреннего сгорания и наряду с сохранением первого элемента переключения в разомкнутом состоянии.
В случае, когда транспортное средство останавливается при контактировании с поверхностью дороги с крутым наклоном, превышающим пороговое значение, когда вырабатывается запрос на остановку холостого хода, элемент управления остановкой холостого хода обеспечивает продолжение приведения в движение от двигателя внутреннего сгорания, невзирая на зону, различенную элементом различения зоны. После этого, когда вырабатывается запрос на остановку холостого хода, транспортное средство запускается посредством приведения в движение электродвигателем, наряду с продолжением приведения в движение от двигателя внутреннего сгорания наряду с сохранением первого элемента переключения в прерванном состоянии, несмотря на зону, различенную элементом различения зоны. В случае, когда необходимая движущая сила для подъема по наклонной поверхности дороги после запуска в движение транспортного средства не может быть подана только электродвигателем, становится возможным подавать необходимую движущую силу для немедленного осуществления движения транспортного средства посредством добавления движущей силы от двигателя внутреннего сгорания, установкой первого элемента переключения в соединенное состояние.
Гибридным транспортным средством настоящего изобретения является гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания; электродвигатель; устройство накопления электроэнергии, предоставляющее и принимающее электрическую энергию на и от электродвигателя; автоматическую трансмиссию, включающую в себя первый входной вал, который передает движущую силу от двигателя внутреннего сгорания избирательно через первый элемент переключения и который подключен к электродвигателю, второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, выходной вал, присоединенный к первому входному валу или второму входному валу, первый избирающий элемент, который присоединяет первый входной вал и выходной вал зубчатой передачей, выбранной из множества зубчатых передач, и второй избирающий элемент, который присоединяет второй входной вал и выходной вал зубчатой передачей, выбранной из множества зубчатых передач, причем движущая выходная мощность двигателя внутреннего сгорания и электродвигателя переключается и передается на выходной вал; элемент детектирования оставшейся емкости, который детектирует оставшуюся емкость устройства накопления электроэнергии; элемент детектирования скорости транспортного средства, который детектирует скорость движения транспортного средства; и элемент управления, который, когда первый избирающий элемент в присоединенном состоянии, когда первый входной вал и выходной вал являются присоединенными избранной зубчатой передачей, и когда транспортное средство осуществляет движение только движущей силой электродвигателя, в случае, когда скорость транспортного средства детектированная элементом детектирования скорости транспортного средства становится равной или ниже, чем пороговое значение и оставшаяся емкость, детектированная элементом детектирования оставшейся емкости, становится равной или меньше, чем пороговое значение, управляет двигателем внутреннего сгорания для запуска посредством первого постепенного снижения движущей силы электродвигателя, пока присоединенное состояние первого избирающего элемента является размыкаемым, затем размыкания соединенного состояния первого избирающего элемента, и установкой первого элемента переключения в соединенное состояние.
Когда оставшаяся емкость устройства накопления электроэнергии становится равной или меньшей, чем предопределенное значение, становится невозможным запускать двигатель внутреннего сгорания возбуждением электродвигателя электрической энергией из устройства накопления электроэнергии. Также, когда скорость транспортного средства становится равной или меньшей, чем предопределенное значение, становится невозможным запускать двигатель внутреннего сгорания посредством использования кинетической энергии транспортного средства.
Согласно гибридному транспортному средству настоящего изобретения, когда первый избирающий элемент находится в соединенном состоянии, когда первый входной вал и выходной вал являются соединенными зубчатой передачей и транспортное средство осуществляет движение только движущей силой электродвигателя в случае, когда скорость транспортного средства становится равной или меньшей, чем пороговое значение, и оставшаяся емкость устройства накопления электроэнергии становится равной или меньшей, чем пороговое значение, двигатель внутреннего сгорания запускается посредством разъединения соединенного состояния первого избирающего элемента и установкой первого элемента переключения в подключенное состояние, после постепенного снижения движущей силы электродвигателя, в то время как соединенное состояние первого избирающего элемента становится разъединенным.
Поэтому установкой порогового значения оставшейся емкости в значение, превышающее предопределенное значение, в котором запуск двигателя внутреннего сгорания становится невозможным, и установкой порогового значения скорости транспортного средства в значение, равное или большее, чем предопределенное значение, в котором запуск двигателя внутреннего сгорания становится невозможным, становится возможным надежно запускать двигатель внутреннего сгорания прежде чем становится невозможным запускать двигатель внутреннего сгорания посредством возбуждения электродвигателя электрической энергией от устройства накопления электроэнергии.
Двигатель внутреннего сгорания запускается установкой первого элемента переключения в подключенное состояние, после разъединения присоединенного состояния первого избирающего элемента так, чтобы движущая сила от запуска двигателя внутреннего сгорания не передавалась на выходной вал. Дополнительно, поскольку электродвигатель может использоваться только для запуска двигателя внутреннего сгорания становится возможным надежно запускать двигатель внутреннего сгорания.
В гибридном транспортном средстве настоящего изобретения, предпочтительно, что транспортное средство дополнительно содержит тормоз, который тормозит движение транспортного средства, причем элемент управления управляет двигателем внутреннего сгорания для запуска, когда транспортное средство останавливается во время постепенного уменьшения движущей силы электродвигателя установкой первого элемента переключения в соединенное состояние, когда движущая сила электродвигателя становится приблизительно нулевой, наряду с сохранением, посредством тормоза, остановленного состояния транспортного средства.
В этом случае, даже когда транспортное средство движется по наклонной дороге вверх, когда транспортное средство останавливается, двигатель внутреннего сгорания запускается наряду с сохранением, посредством тормоза, остановленного состояния транспортного средства. После этого, становится возможным запускать двигатель внутреннего сгорания без соскальзывания вниз транспортного средства по поверхности дороги. Дополнительно, нет необходимости оценивать наклон дороги так, как в Патентном документе 2.
Дополнительно, в гибридном транспортном средстве настоящего изобретения, предпочтительно, транспортное средство дополнительно содержит тормоз, который тормозит движение транспортного средства, причем элемент управления управляет двигателем внутреннего сгорания для запуска, когда транспортное средство останавливается, перед запуском двигателя внутреннего сгорания, посредством воздействия тормоза для создания нулевой движущей силы электродвигателя, а также установкой первого элемента переключения в соединенное состояние.
В этом случае, когда транспортное средство останавливается перед запуском двигателя внутреннего сгорания, двигатель внутреннего сгорания запускается наряду с сохранением, посредством тормоза, остановленного состояния. Поэтому, даже когда поверхность дороги, на которой остановилось транспортное средство, круто наклонена, становится возможным запускать двигатель внутреннего сгорания без соскальзывания вниз транспортного средства с поверхности дороги. Дополнительно, нет необходимости оценивать наклон дороги как в Патентном документе 2.
Предопределенное значение оставшейся емкости устройства накопления электроэнергии, при котором запуск двигателя внутреннего сгорания становится невозможным посредством возбуждения электродвигателя электрической энергией от устройства накопления электроэнергии, отличается согласно наклону поверхности дороги, с которой контактирует транспортное средство.
В гибридном транспортном средстве настоящего изобретения, предпочтительно, что транспортное средство дополнительно содержит элемент детектирования наклона, который распознает наклон поверхности дороги, с которым соприкасается транспортное средство, в котором пороговое значение оставшейся емкости установлено согласно наклону, детектированному элементом детектирования наклона.
Дополнительно, когда движущая сила электродвигателя постепенно снижается, толчок становится большим, так как скорость транспортного средства становится быстрее.
Поэтому, в гибридном транспортном средстве настоящего изобретения, предпочтительно, элемент управления снижает уменьшение скорости движущей силы во время постепенного уменьшения движущей силы электродвигателя, когда скорость транспортного средства, детектированная элементом детектирования скорости транспортного средства, становится выше.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - пояснительный вид, показывающий гибридное транспортное средство, согласно варианту осуществления настоящего изобретения.
Фиг.2 - пояснительный вид, показывающий зональность устройства накопления электроэнергии.
Фиг.3 - таблица, показывающая разрешение, ограничение, запрещение различной операции согласно зоны устройства накопления электроэнергии.
Фиг.4 - блок-схема, показывающая управление остановкой холостого хода.
Фиг.5 - временная диаграмма, показывающая управление остановкой холостого хода, в случае равного или большего, чем L зоны A, когда вырабатывается запрос остановки холостого хода.
Фиг.6 - временная диаграмма, показывающая управление остановкой холостого хода, в случае зоны В, когда вырабатывается запрос остановки холостого хода.
Фиг.7 - блок-схема, показывающая управление запуском двигателя внутреннего сгорания во время движения EV.
Фиг.8 - временная диаграмма, показывающая управление запуском двигателя внутреннего сгорания муфтой сцепления запуска.
Фиг.9 (а), (b), и (c) - коллинеарные диаграммы, показывающие изменение согласно истечению времени управления запуском двигателя внутреннего сгорания посредством запуска IMA.
Фиг.10 - пояснительный вид, показывающий другую автоматическую трансмиссию, которой оборудовано гибридное транспортное средство, согласно осуществления настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ссылаясь на чертежи, будет пояснен вариант осуществления гибридного транспортного средства согласно настоящему изобретению.
Гибридное транспортное средство, проиллюстрированное на фиг.1, оборудовано двигателем ENG внутреннего сгорания, электродвигателем MG, устройством BATT накопления электроэнергии, содержащим вторичную аккумуляторную батарею, которая отправляет и принимает электроэнергию на и из электродвигателя MG, автоматическую трансмиссию 1 и устройство ECU управления мощностью (блок управления электроэнергией), который управляет каждой частью автоматической трансмиссии 1, двигателем ENG внутреннего сгорания, и электродвигателем MG.
Автоматическая трансмиссия 1, оборудована входным валом 2 двигателя, к которому передается движущая мощность (выходной крутящий момент) двигателя ENG внутреннего сгорания, выходной элемент 3 состоит из выходной шестерни, которая выводит мощность на правое и левое передние колеса, служащие ведущими колесами через промежуточную шестерню дифференциала, которая не показана, и множество зубчатых передач G2 по G5, имеющих различные передаточные отношения.
Дополнительно, автоматическая трансмиссия 1 включает в себя первый входной вал 4, который с возможностью вращения поддерживает ведущие шестерни G3a и G5a нечетных зубчатых передач G3 и G5, которые устанавливают каждые ступени переключения передач, перечисляемых нечетных в ранговом порядке передаточного отношения, второй входной вал 5, который с возможностью вращения поддерживает ведущие шестерни G2a и G4a даже зубчатых передач G2 и G4, которые устанавливают ступени переключения передач, даже перечисляемых в ранговом порядке передаточного отношения, и вал 6 заднего хода, который с возможностью вращения поддерживает шестерню заднего хода GR. Первый входной вал 4 расположен на той же осевой линии с выходным валом 2 двигателя и второй входной вал 5 и вал 6 заднего хода размещены параллельно первому входному валу 4.
Дополнительно, автоматическая трансмиссия 1 оборудована нейтральной зубчатой передачей Gi, составленной посредством нейтральной ведущей шестерни Gia с возможностью вращения поддерживаемой первым входным валом 4, первая нейтральная ведущая шестерня Gib, которая прикреплена к нейтральному валу 7 и которая соединена с нейтральной ведущей шестерней Gia, вторая нейтральная ведущая шестерня Gic, которая прикреплена ко второму входному валу 5, и третья нейтральная ведущая шестерня Gid, которая прикреплена к шестерне 6 заднего хода, и которая соединена с первой нейтральной ведущей шестерней Gib. Холостой вал 7 размещен параллельно первому входному валу 4.
Автоматическая трансмиссия 1 включает в себя первое сцепление C1 и второе сцепление C2, которое содержит сухое фрикционное сцепление или сцепление гидроприводного типа, работающее в масляной ванне. Первое сцепление C1 сконфигурировано с возможностью свободно переключаться между состоянием передачи, в котором движущая мощность двигателя ENG внутреннего сгорания передается на выходной вал 2 двигателя, передается на первый входной вал 4, и разомкнутым состоянием, в котором трансмиссия отключена. Второе сцепление C2 сконфигурировано с возможностью свободного переключения между состоянием передачи, в котором движущая сила двигателя ENG внутреннего сгорания передается на выходной вал 2 двигателя, передается на второй входной вал 5, и разомкнутым состоянием, в котором трансмиссия отключена. Когда состояние передачи установлено посредством включения второго сцепления C2, выходной вал 2 двигателя подключен ко второму входному валу 5 через первую нейтральную ведущую шестерню Gib и вторую нейтральную ведущую шестерню Gic.
Предпочтительно, чтобы оба сцепления C1 и C2 приводились в действие посредством электрического исполнительного механизма так, чтобы состояние изменялось быстро. Оба сцепления C1 и C2 могут приводиться в действие исполнительным механизмом гидравлического типа.
Дополнительно, автоматическая трансмиссия 1, механизм PG планетарной передачи, который является механизмом дифференциального вращения, располагается соосно с выходным валом 2 двигателя. Механизм PG планетарной передачи является механизмом односателлитного типа, состоящим из солнечной шестерни Sa, коронной шестерни Ra, и водила Ca, которое, с возможностью вращения, поддерживает сателлит Pa, зацеплением с солнечной шестерней Sa и кольцевой шестерней Ra так, чтобы эти шестерни вращались на своих осях и вращались по эпициклической траектории движения.
Если три вращательных элемента, состоящие из солнечной шестерни Sa, водила Ca, и коронной шестерни Ra механизма PG планетарной передачи определены как первый вращательный элемент, второй вращательный элемент и третий вращательный элемент со стороны солнечной шестерни Sa, в порядке, в котором они размещены на интервалах, соответствующих передаточным отношениям в диаграмме распределения скоростей (диаграмма возможности или представляющая относительную скорость вращения каждого поворотного элемента с прямыми линиями), тогда первый вращательный элемент соответствует солнечной шестерне Sa, второй вращательный элемент соответствует водилу Ca, и третий вращательный элемент соответствует коронной шестерне Ra.
Когда передаточное отношение механизма PG планетарной передачи (количество зубцов коронной шестерни Ra/количество зубцов солнечной шестерни Sa) обозначено g, отношение интервала между солнечной шестерней Sa, служащей первым вращательным элементом и водилом Ca, служащим вторым вращательным элементом и интервал между водилом Ca, служащим вторым вращательным элементом и коронной шестерней Ra, служащей третьим вращательным элементом, становится g:1.
Солнечная шестерня Sa, служащая первым вращательным элементом, прикреплена к первому входному валу 4. Водило Ca, служащее вторым вращательным элементом, соединено с ведущей шестерней третьей скорости G3a третьей зубчатой передачи G3. Коронная шестерня Ra, служащая третьим вращательным элементом, соединена с возможностью разъединения с неподвижным участком, как в случае передачи посредством механизма R1 блокировки.
Механизм R1 блокировки сконфигурирован из механизма синхрозацепления, предоставляющего возможность переключаться свободно между сцепленным состоянием, в котором коронная шестерня Ra прикреплена к неподвижному участку и разъединенным состоянием, в котором коронная шестерня Ra является вращаемой.
Механизм R1 блокировки не ограничен механизмом синхрозацепления и может быть сконфигурирован из механизма выключения фрикционного зацепления, такого как муфта, тормоза, такие как тормоз многодискового типа, работающего в масляной ванне, ступичный тормоз, и ленточный тормоз и тому подобные, муфта свободного хода или двухсторонняя муфта и тому подобное.
Также, механизм PG планетарной передачи может быть сконфигурирован из двухсателлитного типа, содержащего солнечную шестерню, коронную шестерню и водило, которое с возможностью вращения поддерживает пару сателлитов Pa, Pa', сцепляемых друг с другом и одним сателлитом, сцепляемым с солнечной шестерней Sa и другим сателлитом, сцепляемым с коронной шестерней Ra так, чтобы эти шестерни вращались на своих осях и вращались по эпициклической траектории движения. В этом случае, например, это может быть сконфигурировано так, чтобы солнечная шестерня (первый вращательный элемент) соединялась с первым входным валом 4, коронная шестерня (второй вращательный элемент) соединялась с ведущей шестерней третьей скорости зубчатой передачи третьей скорости и водило (третий вращательный элемент) соединялось с возможностью разъединения с неподвижным участком с помощью механизма R1 блокировки.
Полый электродвигатель MG (двигатель/генератор) размещен на внешней стороне в радиальном направлении механизма PG планетарной передачи. Другими словами, механизм PG планетарной передачи размещен на внутренней стороне полого электродвигателя MG. Электродвигатель MG имеет статор MGa и ротор MGb.
Дополнительно, электродвигатель MG управляется через блок PDU силового привода на основе сигналов команд устройства ECU управления мощностью. Устройство ECU управления мощностью переключает блок PDU силового привода, как необходимо между режимом привода, причем мощность электроэнергии, устройства BATT хранения электроэнергии, потребляется для возбуждения электродвигателя MG и режимом рекуперации, в котором электрическая мощность генерируется наряду со сдерживанием вращающей силы ротора MGb и генерируемая электрическая мощность заряжается в устройство BATT накопления электроэнергии, через блок PDU силового привода.
Первая ведущая шестерня Go1, которая зацепляется с ведущей шестерней G2a второй скорости и ведущей шестерней G3a третьей скорости, прикреплена к выходному валу 3a, который поддерживает выходной элемент 3. Дополнительно, вторая ведущая шестерня Go2, которая зацепляется с ведущей шестерней G4a четвертой скорости и ведущей шестерней G5a пятой скорости, прикреплена к выходному валу 3a. Также, парковочная шестерня GP прикреплена к выходному валу 3a.
Таким образом, создание ведущей шестерни зубчатой передачи G2 второй скорости и зубчатой передачи G3 третьей скорости и ведущих шестерен зубчатой передачи G4 четвертой скорости и зубчатой передачи G5 пятой скорости посредством одиночной шестерни Go1 и одиночной шестерни Go2, соответственно, дает возможность сократить осевую длину автоматической трансмиссии и тем самым улучшить возможность установки в транспортном средстве FF (переднеприводного) типа.
Первый входной вал 4 имеет первый механизм SM1 зацепления, который является первым избирающим средством, который состоит из механизма синхрозацепления, и который предоставляет возможность переключения в одно из состояния соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, состояние соединения к стороне пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены, и нейтрального состояния, в котором подключение ведущей шестерни G3a третьей скорости и ведущей шестерни G5a пятой скорости к первому входному валу 4 отключено.
Второй входной вал 5 имеет второй механизм SM2 зацепления, который является вторым избирающим средством, который состоит из механизма синхрозацепления, и который предоставляет возможность переключения в одно из состояния соединения к стороне второй скорости, в котором ведущая шестерня G2a второй скорости и второй входной вал 5 соединены, состояния соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены, и нейтрального состояния, в котором соединение ведущей шестерни G2a второй скорости и ведущей шестерни G4a четвертой скорости ко второму входному валу 5 отключено.
Дополнительно, ведущая шестерня заднего хода GRa, которая зацепляется с шестерней заднего хода GR, соединена с первым входным валом 4.
Вал 6 заднего хода имеет третий механизм SM3 зацепления, который состоит из механизма синхрозацепления, и который предоставляет возможность переключения в одно из состояния соединения, в котором шестерня GR заднего хода и вал 6 заднего хода соединены и нейтрального состояния, в котором их соединение отключено.
Далее, будет пояснена работа автоматической трансмиссии 1, сконфигурированной, как упомянуто выше.
Автоматическая трансмиссия 1 предоставляет возможность осуществления IMA запуска двигателя ENG внутреннего сгорания, использующего движущую силу электродвигателя MG посредством включения первого сцепления C1.
В случае установления первой ступени скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, коронная шестерня Ra механизма PG планетарной передачи установлена в зацепленное состояние посредством механизма R1 блокировки, и первое сцепление C1 включено в состояние передачи.
Движущая сила двигателя ENG внутреннего сгорания вводится на солнечную шестерню Sa механизма PG планетарной передачи через выходной вал 2 двигателя, первое сцепление C1 и первый входной вал 4. Скорость вращения двигателя ENG внутреннего сгорания, подведенная к выходному валу 2 двигателя, снижается в 1/(g+1) и сниженная скорость вращения передается на ведущую шестерню G3a третьей скорости через водило Ca.
Отмечая передаточное отношение зубчатой передачи G3 третьей скорости, состоящей из зубчатой передачи G3a третьей скорости и первой ведущей шестерни Go1 (количество зубцов зубчатой передачи G3a третьей скорости/количество зубцов зубчатой передачи Go1 первой скорости) посредством i, движущая сила, переданная на зубчатую передачу G3a третьей скорости, переключается в 1/i(g+1) и затем выводится из выходного элемента 3 через первую ведущую шестерню Go1 и выходной вал 3a, соответственно устанавливая первую ступень скорости. Поступая таким образом, становится возможным осуществлять движение ENG, перемещаясь только движущей силой двигателя ENG внутреннего сгорания.
Как пояснено выше, автоматическая трансмиссия 1 предоставляет возможность установления первой ступени скорости с механизмом PG планетарной передачи и зубчатой передачей третьей скорости, специальный механизм зацепления для первой ступени скорости не нужен, так что становится возможно сократить осевую длину автоматической трансмиссии.
На первой ступени скорости, когда транспортное средство в состоянии замедления согласно оставшейся емкости (скорости заряда) SOC устройства BATT накопления электроэнергии, устройство ECU управления мощностью осуществляет действие замедления рекуперации осуществлением выработки электроэнергии торможением электродвигателем MG. Дополнительно, согласно оставшейся емкости SOC устройства BATT накопления электроэнергии, становится возможным возбуждать электродвигатель MG и осуществлять движение HEV (Гибридное транспортное средство), которое обеспечивает движущую силу двигателя ENG внутреннего сгорания или движения EV (электрического транспортного средства), которое перемещается только движущей силой электродвигателя MG.
Дополнительно, в случае, когда замедление транспортного средства доступно во время движения EV и скорость транспортного средства является предопределенной скоростью или большей, это делает возможным запуск двигателя ENG внутреннего сгорания, используя кинетическую энергию транспортного средства, посредством постепенного включения первого сцепления C1, без использования движущей силы электродвигателя MG.
Если устройство ECU управления мощности предсказывает при движении на первой ступени скорости, что первая ступень скорости будет переключена вверх на вторую ступень скорости, на основе информации транспортного средства, такой как скорость транспортного средства и степень открытия дросселя педалью акселератора, тогда устройство ECU управления мощностью настраивает второй механизм SM2 зацепления в состояние сцепления стороны второй скорости, в котором вторая ведущая шестерня G2a и второй входной вал 5 соединены, или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Чтобы установить вторую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, второй механизм SM2 зацепления устанавливается в состояние сцепления стороны второй скорости, в котором ведущая шестерня G2a второй скорости присоединена ко второму входному валу 5, и затем второе сцепление C2 включается в состояние передачи. Поступая таким образом, движущая сила двигателя ENG внутреннего сгорания выводится от выходного элемента 3, через второе сцепление C2, нейтральную зубчатую передачу Gi, второй входной вал 5, зубчатую передачу G2 второй скорости и выходной вал 3a.
Если устройство ECU управления мощностью предсказывает, при движении на второй ступени скорости, что вторая ступень скорости будет переключена вверх, тогда устройство ECU управления мощностью устанавливает первый механизм SM1 зацепления в состояние сцепления стороны третьей скорости, в котором ведущая шестерня третьей скорости G3a и первый входной вал 4 присоединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Напротив, если устройство ECU управления мощностью предсказывает переключение вниз, первый механизм SM1 зацепления устанавливается в нейтральное состояние, в котором соединение ведущей шестерни G3a третьей передачи и ведущей шестерни G5a пятой передачи с первым входным валом 4 отключено.
Поступая таким образом, становится возможным осуществлять переключение вверх или переключение вниз посредством установки первого сцепления C1 в состояние передачи и установки второго сцепления C2 в разомкнутое состояние так, чтобы переключение ступени скорости могло осуществляться равномерно без прерывания движущей силы.
Дополнительно, также на второй ступени скорости, в случае, когда транспортное средство находится в состоянии замедления, устройство ECU управления мощностью осуществляет действие замедления рекуперации согласно оставшейся емкости SOC устройства BATT накопления электроэнергии. В случае осуществления действия замедления рекуперации на второй ступени скорости он различает, является ли первый механизм SM1 зацепления в состоянии соединения к стороне третьей скорости или нейтральном состоянии.
В случае, когда первый механизм SM1 зацепления находится в состоянии соединения к стороне третьей скорости, третья ведущая шестерня G3a, которая вращается посредством первой ведущей шестерни Go1, вращается посредством второй ведущей шестерни G2a, вращает ротор MGb электродвигателя MG через первый входной вал 4. Поэтому рекуперация осуществляется посредством подавления вращения ротора MGb и торможением так, чтобы генерировать мощность.
В случае, когда первый механизм SM1 зацепления находится в нейтральном состоянии, рекуперация осуществляется посредством установления нулевой скорости вращения коронной шестерни Ra посредством установки механизма R1 блокировки в зацепленное состояние и посредством торможения скорости вращения водила Ca, вращающегося вместе с ведущей шестерней G3a третьей передачи, зацепленной с первой ведущей шестерней Go1, подключая электродвигатель MG к солнечной шестерне Sa для генерирования мощности.
Дополнительно, в случае осуществления движения HEV на второй ступени скорости, например, это может осуществляться посредством установления первого механизма SM1 в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены, и каждые элементы механизма PG планетарной передачи установлены в состояние так, чтобы они не могли относительно вращаться, посредством установки механизма R1 блокировки в разъединенное состояние и посредством передачи движущей силы электродвигателя MG на выходное звено 3 через зубчатую передачу G3 третьей скорости. Дополнительно, движение HEV на второй ступени скорости возможно посредством установки нулевой скорости вращения коронной шестерни Ra посредством установки первого механизма SM1 зацепления в нейтральное состояние и механизма R1 блокировки в зацепленное состояние и посредством передачи движущей силы электродвигателя MG на первую ведущую шестерню Go1 через тракт первой ступени скорости.
Чтобы установить третью ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены и первое сцепление C1 включено в состояние передачи. Поступая таким образом, движущая сила двигателя ENG внутреннего сгорания передается на выходное звено 3 через выходной вал 2 двигателя, первое сцепление C1, первый входной вал 4, первый механизм SM1 зацепления и зубчатую передачу G3 третьей скорости и затем выводится на скорости вращения 1/i.
На ступени третьей скорости, первый механизм SM1 зацепления находится в состоянии соединения к стороне третьей скорости, где ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены так, чтобы солнечная шестерня Sa и водило Ca механизма PG планетарной передачи совместно использовали одно и то же вращение.
Следовательно, каждый вращательный элемент механизма PG планетарной передачи находится в состоянии, в котором они не могут вращаться относительно, так, чтобы замедление рекуперации реализовывалось посредством использования электродвигателя MG для применения тормозов к солнечной шестерне Sa, и передача движущей силы на солнечную шестерню Sa посредством электродвигателя MG предоставляет возможность осуществления движения HEV. Дополнительно, возможно осуществлять движение EV, перемещая только движущей силой электродвигателя MG посредством разблокировки первого сцепления C1.
На ступени третьей скорости, если устройство ECU управления мощностью предсказывает переключение вниз на основании информации транспортного средства, такой как скорость транспортного средства или степень открытия дросселя педалью акселератора, тогда второй механизм SM2 зацепления устанавливается в состояние соединения к стороне второй скорости, в котором ведущая шестерня G2a второй скорости и второй входной вал 5 соединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию. Если предсказано переключение вверх, тогда второй механизм SM2 зацепления устанавливается в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Поступая таким образом, становится возможным осуществлять переключение ступени скорости посредством включения второго сцепления C2 в состояние передачи и разблокировкой первого сцепления C1 в разомкнутое состояние, так чтобы изменение скорости могло осуществляться равномерно без прерывания движущей силы.
Чтобы установить четвертую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, второй механизм SM2 зацепления устанавливается в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены и второе сцепление C2 включено в состояние передачи.
Во время движения на четвертой ступени скорости, если устройство ECU управления мощностью предсказывает переключение вниз на основании информации транспортного средства, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию.
Напротив, если устройство ECU управления мощностью предсказывает переключение вверх на основании информации транспортного средства, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в которой ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию. Поступая таким образом, становится возможным выполнять переключение вниз или переключение вверх просто посредством включения первого C1 сцепления в состояние передачи и разблокировки второго сцепления C2 в разомкнутое состояние, так чтобы изменение скорости могло осуществляться равномерно без прерывания движущей силы.
В случае осуществления замедления рекуперации или движения HEV во время перемещения на четвертой ступени скорости, если устройство ECU управления мощностью предсказывает переключение вниз, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены. Замедление рекуперации может осуществляться применением тормоза электродвигателем MG и движение HEV может осуществляться посредством передачи движущей силы.
Если устройство ECU управления мощностью предсказывает переключение вверх, тогда первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены. Замедление рекуперации может осуществляться применением торможения посредством электродвигателя MG и движение HEV может осуществляться передачей движущей силы из электродвигателя MG.
Чтобы установить пятую ступень скорости посредством использования движущей силы двигателя ENG внутреннего сгорания, первый механизм SM1 зацепления устанавливается в состояние соединения к стороне пятой скорости, в котором ведущая шестерня G5a пятой скорости и первый входной вал 4 соединены. На ступени пятой скорости, двигатель ENG внутреннего сгорания и электродвигатель MG непосредственно соединены, когда первое сцепление C1 установлено в состояние передачи, так чтобы движение HEV могло осуществляться посредством вывода движущей силы из электродвигателя MG и замедляющая рекуперация может осуществляться посредством применения торможения электродвигателем MG и выработки энергии.
В случае осуществления движения EV на ступени пятой скорости, первое сцепление C1 устанавливается в разомкнутое состояние. Также, во время движения EV на ступени пятой скорости, двигатель внутреннего сгорания ENG может запускаться посредством постепенного включения первого сцепления C1.
Во время движения на ступени пятой скорости, если устройство ECU управления мощностью предсказывает, из информации транспортного средства, переключение вниз на ступень четвертой скорости, тогда второй механизм SM2 зацепления устанавливается в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня G4a четвертой скорости и второй входной вал 5 соединены или в состояние предпереключения, стремящееся к вышеупомянутому состоянию. Поступая таким образом, переключение вниз на ступень четвертой скорости может осуществляться равномерно без прерывания движущей силы.
Чтобы установить обратную ступень посредством использования движущей силы двигателя ENG внутреннего сгорания, третий механизм SM3 зацепления устанавливается в соединенное состояние, в котором шестерня заднего хода GR и вал 6 заднего хода соединены и тогда второе сцепление C2 включается в состояние передачи. Это изменяет скорость вращения выходного вала 2 двигателя в отрицательное вращение (вращение в обратном направлении) и скорость вращения выводится из выходного элемента 3, тем самым, устанавливая обратную ступень.
Для выполнения замедленной рекуперации или движения HEV на обратной ступени, первый механизм SM1 зацепления устанавливается в состояние соединения к стороне третьей скорости, в котором ведущая шестерня G3a третьей скорости и первый входной вал 4 соединены и каждый вращательный элемент механизма PG планетарной передачи установлен в состояние, в котором они не могут относительно вращаться посредством установки механизма R1 блокировки в разомкнутое состояние. Тогда, побуждение ротора MGb вращаться в обратном направлении для выработки движущей силы на стороне прямого вращения и применение тормоза реализует замедленную рекуперацию, в то время как побуждение ротора MGb вырабатывать движущую силу на стороне обратного вращения реализует движение HEV. Дополнительно, движение EV на обратной ступени может устанавливаться заданием обоих сцеплений C1 и C2 в разомкнутое состояние и механизма R1 блокировки в закрепленное состояние и реверсированием электродвигателя MG.
Дополнительно, транспортное средство снабжено механизмом В торможения, который тормозит движение транспортного средства. Во время остановки транспортного средства, когда действует механизм В торможения и транспортное средство находится в состоянии торможения транспортного средства, вращение выходного вала 3a тормозится и транспортное средство продолжает останавливаться. Механизм В торможения является тормозным диском или ему подобным и управляемым устройством ECU управления мощностью.
Дополнительно, транспортное средство снабжено датчиком 11 наклона, который детектирует наклон D поверхности дороги, с которым контактирует транспортное средство, датчиком 14 педали тормоза, который детектирует наличие или отсутствие нажатия ногой на педаль тормоза, датчик 13 скорости транспортного средства, который измеряет скорость движения транспортного средства, и датчик 14 педали акселератора, который детектирует степень открытия дросселя педалью акселератора. Сигналы детектирования от этих датчиков 11-14 вводятся в устройство ECU управления мощностью.
Устройство ECU управления мощностью оборудовано элементом 21 различения зоны, который детектирует оставшуюся емкость SOC устройства BATT накопления электроэнергии и различает зону на основе детектированной оставшейся емкости SOC. Предопределенное значение оставшейся емкости SOC устройства BATT накопления электроэнергии, которое делает невозможным запуск двигателя ENG внутреннего сгорания посредством возбуждения электродвигателя MG электрической энергией из устройства BATT накопления электроэнергии, отличается согласно наклону D поверхности дороги, с которым контактирует транспортное средство.
Поэтому, как показано на фиг.2, элемент 21 различения зоны осуществляет зонирование оставшейся емкости SOC наряду с принятием в расчет наклона D, детектируемого датчиком 11 наклона. Пороговое значение каждой области установлено так, что пороговое значение постоянно, пока наклон D достигает предопределенного наклона Da, большего чем 0 градусов и так, что пороговое значение становится больше, когда наклон D становится большим, когда наклон D является большим, чем наклон Da. Пороговое значение каждой зоны может быть установлено наряду с принятием в расчет других элементов, таких как температура устройства BATT накопления электроэнергии.
Конкретно, зона классифицируется на зону А, которая является обычно используемой зоной, и которая становится стандартной зоной, зону В, которая имеет меньшую оставшуюся емкость SOC, чем зона А и которая является зоной ограниченного разряда, в которой разряд частично ограничен, зону С, которая имеет оставшуюся емкость SOC, меньшую, чем зона В, и является зоной запрещенного разряда, в которой разряд ограничен и зону D, в которой имеется большая оставшаяся емкость SOC, чем зона А и является зоной ограниченного заряда, в которой зарядка ограничена. Зона А, дополнительно, классифицируется на промежуточную М зоны А, в которой оставшаяся емкость SOC оптимальна, L зоны А, которая имеет меньшую оставшуюся емкость SOC, чем M зоны А и H зоны A, которая имеет большую оставшуюся емкость SOC, чем М зоны А.
Элемент 21 различения зоны соответствует элементу детектирования оставшейся емкости настоящего изобретения, и пороговое значение между L зоны А и зоной В соответствует пороговому значению оставшейся емкости настоящего изобретения.
Устройство ECU управления мощностью управляет двигателем ENG внутреннего сгорания, электродвигателем MG и автоматической трансмиссией 1 на основе зоны, различенной элементом 21 различения зоны. Как показано на фиг.3, устройство ECU управления мощностью разрешает, ограничивает или запрещает различные операции на основе зоны.
Затем, управление остановкой холостого хода гибридного транспортного средства будет пояснено со ссылкой на фиг.4. Последовательность операций исполняется устройством ECU управления мощностью, которое соответствует элементу управления остановкой холостого хода настоящего изобретения.
Когда вырабатывается запрос остановки холостого хода (этап 1: ДА), тогда определяется, является или нет наклон D, детектированный посредством датчика 11 наклона, равным или меньшим, чем наклон Db (этап 2). Определено, что запрос остановки холостого хода вырабатывается в случае, когда хорошо известные предопределенные условия удовлетворяют всех, так как датчик 12 педали тормоза распознает нажатие ногой на педаль тормоза, скорость транспортного средства, измеренная датчиком 13 скорости транспортного средства, является нулевой (транспортное средство остановлено) и тому подобное.
В случае, когда определено, что наклон D, детектированный датчиком 11 наклона, равен или меньше, чем наклон Db (этап 2: ДА), тогда определяется, является ли зона различения равной или большей, чем L зоны A (этап 3).
В случае, если определено, что различенная зона равна или больше, чем L зоны A (этап 3: ДА), тогда в случае, когда двигатель внутреннего сгорания ENG является приводящим в движение, он останавливается (этап 4). Во время остановки транспортного средства, механизм В торможения находится в состоянии торможения транспортного средства, и первое сцепление C1 в разомкнутом состоянии.
После этого, когда вырабатывается запрос остановки холостого хода (этап 5: ДА), транспортное средство начинает движение EV (этап 6). Конкретно, состояние торможения транспортного средства механизмом В торможения разблокировано, тормоз B1 установлен в состояние запрещенного заднего хода и коронная шестерня Ra механизма PG планетарной передачи установлена в фиксированное состояние, первое сцепление C1 включено в состояние передачи и установлена первая ступень скорости и электродвигатель MG запущен.
Определено, что вырабатывается запрос остановки холостого хода в случае, когда датчик 12 педали тормоза детектирует, что педаль тормоза не нажата, датчик 14 педали акселератора детектирует степень открытия дросселя педалью акселератора, превышающую предопределенное значение и тому подобное.
С другой стороны, в случае, когда различенная зона ниже L зоны A (этап 3: НЕТ), осуществляется зарядка на холостом ходу, в случае, когда двигатель ENG внутреннего сгорания является приводящим в движение, продолжением приведения в движение (этап 7). Во время остановки транспортного средства, механизм В торможения находится в состоянии торможения транспортного средства, первое сцепление C1 находится в состоянии передачи и первый механизм SM1 зацепления находится в нейтральном состоянии.
После этого, когда вырабатывается запрос остановки холостого хода (этап 8: ДА), тогда определяется, является ли зона различения равной или большей, чем L зоны A (этап 9). В случае, если определено, что различенная зона равна или больше, чем L зоны A (этап 9: ДА), тогда приведение в движение двигателем ENG внутреннего сгорания останавливается и после этого транспортное средство начинает движение посредством движения EV (этап 10).
Конкретно, как показано на фиг.5, когда вырабатывается запрос остановки холостого хода, приведение в движение двигателем ENG внутреннего сгорания останавливается и также состояние торможения транспортного средства механизмом В торможения разблокируется, движущая сила электродвигателя MG в отрицательном направлении увеличивается так, чтобы тормозить вращение первого входного вала 4 в обратном направлении и уменьшать скорость вращения выходного вала 2 двигателя. После этого, когда скорость вращения выходного вала 2 двигателя становится равной или меньше, чем предопределенная низкая скорость вращения N1, первое сцепление C1 устанавливается в разомкнутое состояние. После этого, скорость вращения, устанавливаемая ротором MGb электродвигателя MG, является такой, что скорость вращения коронной шестерни Ra становится нулевой и наряду с сохранением состояния, когда движущая сила электродвигателя MG равна нулю, первая ступень скорости устанавливается заданием тормоза B1 в состояние запрещения обратного движения и заданием коронной шестерни Ra механизма PG планетарной передачи в зацепленное состояние и тогда движущая сила электродвигателя MG увеличивается.
В случае, когда различенная зона определяется равной или большей, чем L зоны A перед выработкой запроса остановки холостого хода, приведение в движение двигателем ENG внутреннего сгорания может быть остановлено и в это время первое сцепление C1 может быть установлено в разомкнутое состояние. В этом случае, однако, первое сцепление C1 только включается в состояние передачи, когда вырабатывается запрос остановки холостого хода.
С другой стороны, в случае, когда определено, что различенная зона ниже L зоны A (этап 9: НЕТ), тогда определяется, является или нет зона различения зоной B(этап 11). В случае, когда определено, что различенная зона является зоной В (этап 11: ДА), тогда транспортное средство начинает движение посредством движения EV наряду с продолжением приведения в движение двигателем ENG внутреннего сгорания (этап 12). Во время остановки транспортного средства, механизм В торможения находится в состоянии торможения транспортного средства, первое сцепление C1 находится в состоянии передачи и первый механизм SM1 зацепления находится в нейтральном состоянии.
Конкретно, как показано на фиг.6, когда вырабатывается запрос остановки холостого хода, состояние торможения транспортного средства механизмом В торможения разблокировано, а также первое сцепление C1 установлено в разъединенное состояние. После этого, скорость вращения, устанавливаемая ротором MGb электродвигателя, является такой, что скорость вращения коронной шестерни Ra становится нулевой и наряду с сохранением состояния, когда движущая сила электродвигателя MG является нулевой, первая ступень скорости устанавливается заданием тормоза B1 в состояние запрещения обратного движения и заданием коронной шестерни Ra механизма PG планетарной передачи в фиксированное состояние и тогда движущая сила электродвигателя MG увеличивается.
С другой стороны, в случае, когда определено, что различенная зона не является зоной В, то есть, это зона С (этап 11: НЕТ), тогда транспортное средство начинает движение посредством движущей силы двигателя ENG внутреннего сгорания (этап 13).
Конкретно, когда вырабатывается запрос остановки холостого хода, состояние торможения транспортного средства механизмом В торможения разблокировано, тормоз B1 установлен в состояние запрещения заднего хода и коронная шестерня Ra механизма PG планетарной передачи установлена в фиксированное состояние, так чтобы установить первую ступень скорости, и в дальнейшем первое сцепление C1 постепенно включается в состояние передачи.
Дополнительно, в случае, когда определено, что наклон D, детектированный датчиком 11, наклона превышает наклон Db (этап 2: НЕТ), тогда осуществляется зарядка на холостом ходу, в случае когда двигатель ENG внутреннего сгорания является приводящим в движение, посредством продолжения приведения в движение (этап 14). Во время остановки транспортного средства, механизм В торможения находится в состоянии торможения транспортного средства, первое сцепление C1 находится в состоянии передачи и первый механизм SM1 зацепления находится в нейтральном состоянии. Однако в случае, когда зона различения равна или больше, чем H зоны A, зарядка на холостом ходу не осуществляется.
В дальнейшем, когда вырабатывается запрос остановки холостого хода (этап 15: ДА), как это происходит на этапе 12, транспортное средство начинает движение посредством движения EV, наряду с продолжением приведения в движение двигателем ENG внутреннего сгорания (этап 16).
Как пояснено выше, устройство ECU управления мощностью осуществляет соответствующее управление остановкой холостого хода, согласно зоны, различенной элементом 21 различения зоны, на основе оставшейся емкости SOC устройства BATT накопления электроэнергии, становится возможным надежно запускать в движение транспортного средства.
То есть в случае зоны В или зоны С, в которых оставшаяся емкость устройства BATT накопления электроэнергии является малой (этап 3: НЕТ), когда вырабатывается запрос остановки холостого хода (этап 1: ДА), приведение в движение двигателем ENG внутреннего сгорания не останавливается (этап 7). После этого, когда вырабатывается запрос остановки холостого хода (этап 8: ДА), в случае зоны С (этап 11: НЕТ), двигатель ENG внутреннего сгорания продолжает приведение в движение и транспортное средство начинает движение посредством включения первого сцепления C1 в соединенное состояние (ЭТАП 13).
Поэтому, даже в зоне С, в которой не является возможным запускать двигатель ENG внутреннего сгорания движущей силой электродвигателя MG из электрической энергии устройства BATT накопления электроэнергии, становится возможным начинать движение транспортного средства движущей силой двигателя ENG внутреннего сгорания.
Дополнительно, когда вырабатывается запрос остановки холостого хода (этап 8: ДА), в случае зоны В (этап 11: ДА), двигатель ENG внутреннего сгорания продолжает приведение в движение и транспортное средство начинает движение возбуждением электродвигателя MG наряду с сохранением первого сцепления C1 в разъединенном состоянии (этап 12).
Поэтому, после запуска в движение транспортного средства, в случае, когда оставшаяся емкость SOC устройства BATT накопления электроэнергии уменьшается, чтобы стать зоной В, становится возможным сделать движение транспортного средства посредством движущей силы двигателя ENG внутреннего сгорания и включением первого сцепления C1 в соединенное состояние.
Дополнительно, когда вырабатывается запрос остановки холостого хода (этап 1: ДА), даже в зоне В или зоне С, где оставшаяся емкость SOC устройства BATT накопления электроэнергии является малой (этап 3: НЕТ), в случае, когда оставшаяся емкость SOC устройства BATT накопления электроэнергии увеличивается от зарядки на холостом ходу, в дальнейшем (этап 7), чтобы стать L зоны А или большей (этап 9: ДА), транспортное средство начинает движение посредством установки двигателя ENG внутреннего сгорания в остановленное состояние и электродвигателя MG в состояние приведения в движение (этап 10). Поэтому становится возможным начинать движение транспортного средства двигателем ENG внутреннего сгорания без сопровождающего потребления топлива.
Дополнительно, когда вырабатывается запрос остановки холостого хода (этап 1: ДА), в случае зоны В или зоны С, в которой оставшаяся емкость SOC устройства BATT накопления электроэнергии является малой, зарядка на холостом ходу устройства BATT накопления электроэнергии осуществляется двигателем ENG внутреннего сгорания, продолжающим приведение в движение, первое сцепление C1 устанавливается в соединенное состояние и первый входной вал 4 вращается (этап 7). После этого, становится возможным увеличивать оставшуюся емкость SOC устройства BATT накопления электроэнергии во время остановки транспортного средства.
Дополнительно, когда вырабатывается запрос остановки холостого хода (этап 1: ДА), в случае, когда транспортное средство останавливается наряду с более наклонной поверхностью дороги с углом, превышающим пороговое значение Db (этап 2: НЕТ), приведение в движение двигателем ENG внутреннего сгорания продолжается, невзирая на зону, различенную элементом 21 различения зоны.
После этого, когда вырабатывается запрос остановки холостого хода (этап 15: ДА), транспортное средство начинает движение посредством возбуждения электродвигателя MG, наряду с продолжением приведения в движение двигателем ENG внутреннего сгорания и сохранением первого сцепления C1 в разъединенном состоянии, невзирая на зону, различенную элементом 21 различения зоны (этап 16).
В дальнейшем, после начала движения транспортного средства, даже в случае, когда необходимая движущая сила для подъема по наклоненной поверхности дороги не может быть представлена только из электродвигателя MG, становится возможным немедленно перемещать транспортное средство добавлением движущей силы двигателя ENG внутреннего сгорания, установкой первого сцепления C1 в подключенное состояние.
Затем, управление гибридным транспортным средством во время движения EV будет пояснено со ссылкой на фиг.7. Последовательность операций исполняется устройством ECU управления мощностью, соответствующим элементу управления настоящего изобретения.
Первое, определяется, является или нет зона, различенная элементом 21 различения зоны, равной или большей, чем L зоны A (этап 21). В случае, когда различенная зона определена как равная или большая, чем L зоны A (этап 21: ДА), движение транспортного средства продолжается в состоянии, когда разрешается остановка холостого хода, движение EV и начало движения EV (этап 22).
С другой стороны, в случае, когда определено, что различенная зона находится ниже L зоны A, то есть, это зона В или зона С (этап 21: НЕТ), тогда определяется, является или нет двигатель ENG внутреннего сгорания приводящим в движение (этап 23).
В случае, когда двигатель ENG внутреннего сгорания является приводящим в движение (этап 23: ДА), движение транспортного средства продолжается в состоянии, когда остановка холостого хода, движение EV и начало движения EV запрещены (этап 24), до тех пор пока зона не станет равной или большей, чем L зоны А (этап 25: "ДА").
С другой стороны, в случае, когда определено, что двигатель ENG внутреннего сгорания не является приводящим в движение (этап 23: НЕТ), тогда определяется, является или нет скорость S транспортного средства детектированной датчиком 13 скорости транспортного средства, превышающей предопределенное пороговое значение S0 (этап 26). Предопределенное пороговое значение S0 является скоростью транспортного средства, позволяющей запускать двигатель ENG внутреннего сгорания и, например, является 10 км в час.
В случае, когда скорость S транспортного средства превышает предопределенное пороговое значение S0 (этап 26: ДА), тогда двигатель ENG внутреннего сгорания запускается муфтой сцепления при запуске (этап 27).
Конкретно, как показано на фиг.8, например, в случае, когда транспортное средство осуществляет движение EV в фиксированном состоянии ступени второй скорости, первым второй механизм SM2 зацепления устанавливается в состояние соединения к стороне второй скорости, а автоматическая трансмиссия 1 - в состояние предпереключения второй скорости, и затем второе сцепление C2 постепенно включается. В это время, движущая мощность, передающаяся на выходной вал 3a, уменьшается от трения второго сцепления C2, так что движущая сила электродвигателя MG увеличивается так, чтобы компенсировать это уменьшение.
После этого, когда скорость вращения выходного вала 2 двигателя достигает скорости N1 вращения запуска, которая является скоростью вращения, способной запускать двигатель ENG внутреннего сгорания, двигатель ENG внутреннего сгорания запускается воспламенением свечи зажигания (не показана). После этого, когда скорость вращения выходного вала 2 двигателя достигает целевой частоты N2 вращения, второе сцепление C2 включается в состояние передачи. В это время, движущая сила Tm электродвигателя MG понижается в соответствии с повышением в движущей силе Te двигателя ENG внутреннего сгорания и в заключение транспортное средство осуществляет движение только движущей силой Te двигателя ENG внутреннего сгорания.
После этого, движение только посредством движущей силы Te двигателя ENG внутреннего сгорания продолжается в состоянии, когда остановка холостого хода, движение EV и начало движения EV запрещены (этап 24), до тех пор пока зона не станет равной или большей, чем L зоны А (этап 25: "ДА").
С другой стороны, в случае, когда скорость S транспортного средства равна или меньше, чем предопределенное пороговое значение S0 (этап 26: НЕТ), определяется, является или нет скорость S транспортного средства детектированной датчиком 13 скорости транспортного средства нулевой (этап 28).
В случае, когда скорость S транспортного средства является нулевой, то есть когда транспортное средство остановлено (этап 28: ДА), механизм В торможения устанавливается в состояние торможения транспортного средства, так чтобы надежно сохранять остановленное состояние транспортного средства (этап 29). Поступая таким образом, транспортное средство не соскальзывает вниз по поверхности дороги, даже когда дорожное покрытие, на котором остановилось транспортное средство, имеет крутой наклон.
Из остановленного состояния транспортного средства двигатель ENG внутреннего сгорания запускается нормальным IMA запуском (этап 30). После этого, движение транспортного средства продолжается в состоянии, когда остановка холостого хода, движение EV и начало движения EV запрещены (этап 24), до тех пор пока зона не станет равной или большей, чем L зоны А (этап 25: "ДА").
С другой стороны, в случае, когда скорость S транспортного средства не является нулевой, то есть, в случае, когда транспортное средство является перемещающимся (этап 28: НЕТ), тогда определяется является или нет зона зоной В (этап 31).
В случае, когда зона является зоной В (этап 31: ДА), случай, когда двигатель ENG внутреннего сгорания не способен запускаться посредством приведения в движение электродвигателем MG с электрической энергией из устройства BATT, накопления электроэнергии не происходит быстро. Поэтому, последовательность операций возвращается на этап 26, продолжается движение EV и ожидается возможность, когда скорость транспортного средства превышает предопределенное пороговое значение S0 (этап 26: ДА), или скорость S транспортного средства становится нулевой (этап 28:"ДА").
С другой стороны, в случае, когда зона не является зоной В, то есть это зона С (этап 31: ДА), случай, когда двигатель ENG внутреннего сгорания не способен запускаться посредством возбуждения электродвигателя MG с электрической энергией из устройства BATT, накопления электроэнергии происходит быстро.
Поэтому определяется является или нет движущая сила Tm, вырабатываемая электродвигателем MG, равной или меньшей, чем движущая сила T0, которая способна к разблокированию соединенного состояния первого зацепляющего механизма SM1 (этап 32), и в случае, когда движущая сила Tm, вырабатываемая электродвигателем MG, превышает движущую силу T0 (этап 32: НЕТ), тогда движущая сила Tm, вырабатываемая электродвигателем MG, постепенно уменьшается (этап 33). Когда постепенно уменьшается движущая сила Tm электродвигателя MG, толчок становится большим, когда скорость S транспортного средства становится выше. Поэтому, предпочтительно, чтобы когда скорость S транспортного средства, детектированная датчиком 13 скорости транспортного средства, является увеличивающейся, уменьшающаяся скорость движущей силы Tm электродвигателя MG становилась ниже.
После этого, когда движущая сила Tm, выработанная электродвигателем MG, становится равной или меньшей, чем движущая сила T0 (этап 32: ДА), двигатель ENG внутреннего сгорания запускается посредством запуска IMA, поясненного ниже (этап 30).
Как показано на фиг.9(а), например, в случае, где транспортное средство осуществляет движение EV в фиксированном состоянии ступени третьей скорости, первое, присоединенное к стороне третьей скорости состояние первого механизма SM1 зацепления разъединяется в нейтральное состояние. В это время, как показано на фиг.9(b), скорость S транспортного средства является предельно низкой скоростью ниже предопределенного порогового значения S0 и скорость вращения водила Ca, соединенного с выходным валом 3a, падает из-за сопротивления движению, тогда как скорость вращения солнечной шестерни Sa фиксирована с первым входным валом 4 разъединенным от выходного вала 3a, возрастает так, чтобы коронная шестерня Ra вращалась в обратном направлении.
Тогда, когда скорость вращения первого входного вала 4 превышает скорость N1 вращения для запуска, первое сцепление C1 является включенным и в состоянии, когда скорость вращения выходного вала 2 двигателя превышает скорость N1 вращения запуска, свеча зажигания (не показана) воспламеняется так, чтобы запустить двигатель ENG внутреннего сгорания.
После этого, как только первое сцепление C1 установлено в разомкнутое состояние, как показано на фиг.9(с), наряду с осуществлением установки скорости вращения ротора MGb электродвигателя MG так, чтобы скорость вращения коронной шестерни Ra становилась нулевой, коронная шестерня Ra механизма PG планетарной передачи устанавливается в фиксированное состояние механизмом R1 блокировки так, чтобы устанавливать ступень первой скорости, и тогда первое сцепление C1 является включенным для осуществления движения HEV на ступени первой скорости. После этого, действие электродвигателя MG останавливается, и транспортное средство осуществляет движение только движущей силой двигателя ENG внутреннего сгорания.
После этого, до тех пор пока зона становится равной или большей, чем L зоны A (этап 25: ДА), движение транспортного средства продолжается в состоянии, когда остановка холостого хода, движение EV и начало движения EV запрещены (этап 24).
Как пояснено выше, в случае, когда скорость S транспортного средства становится равной или ниже, чем пороговое значение S0 и зона становится равной или ниже зоны С во время движения EV, движущая сила Tm электродвигателя MG постепенно снижается, до тех пор пока она не станет движущей силой T0, способной разъединить соединенное состояние первого механизма SM1 зацепления, и тогда двигатель ENG внутреннего сгорания запускается посредством разъединения соединенного состояния первого механизма SM1 зацепления и установкой первого сцепления C1 в соединенное состояние.
Поэтому, становится возможным надежно запускать двигатель ENG внутреннего сгорания, прежде чем оставшаяся емкость SOC устройства накопления электроэнергии BATT упадет ниже значения, при котором становится невозможным запускать двигатель ENG внутреннего сгорания посредством возбуждения электродвигателя MG электрической энергией от устройства BATT накопления электроэнергии.
В это время, двигатель внутреннего сгорания запускается посредством разъединения соединенного состояния первого механизма SM1 зацепления, и затем посредством установки первого сцепления C1 в соединенное состояние. Поэтому, движущая сила (крутящий момент) посредством запуска двигателя ENG внутреннего сгорания не передается на выходной элемент 3. Дополнительно, электродвигатель может использоваться только для запуска двигателя ENG внутреннего сгорания, становится возможным надежно запускать двигатель ENG внутреннего сгорания.
После этого, в случае, когда зона становится зоной В, соседней с зоной С, когда скорость S транспортного средства превышает предопределенное пороговое значение S0 или скорость S транспортного средства становится нулевой и транспортное средство остановлено, двигатель ENG внутреннего сгорания запускается посредством возбуждения электродвигателя MG электрической энергией от устройства BATT накопления электроэнергии. Поэтому, становится возможным предотвращать падение оставшейся емкости SOC устройства BATT накопления электроэнергии, посредством запуска двигателя ENG внутреннего сгорания, перед продолжением движения EV и падение оставшейся емкости SOC устройства BATT накопления электроэнергии в зону С.
В настоящем варианте осуществления, пояснение приведено для случая, когда двигатель ENG внутреннего сгорания запускается включением первого сцепления C1 в состояние передачи. Однако двигатель ENG внутреннего сгорания может запускаться посредством включения второго сцепления C2 в состояние передачи.
Дополнительно, автоматическая трансмиссия, предусмотренная для гибридного транспортного средства настоящего изобретения, не ограничена автоматической трансмиссией 1, имеющей пять передних ступеней скорости и одну ступень задней скорости, поясненной выше, и может быть, например, автоматической трансмиссией 1, имеющей семь передних ступеней скорости и одну ступень задней скорости, как это показано на фиг.10.
Автоматическая трансмиссия 1А оборудована множеством зубчатых передач G2 по G7 с различными передаточными числами, ведущие шестерни G3a, G5a, и G7a нечетных зубчатых передач G3, G5 и G7 с возможностью вращения поддерживаются первым входным валом 4 и ведущими шестернями G2a, G4, и G6a каждой зубчатой передачи G2, G4, и G6 с возможностью вращения поддерживаются вторым входным валом 5.
На выходной вал 3a закрепляются первая ведущая шестерня Go1, зацепленная с ведущей шестерней второй скорости G2a и ведущей шестерней третьей скорости G3a, вторая ведущая шестерня Go2, зацепленная с ведущей шестерней шестой скорости G6a и ведущей шестерней седьмой скорости G7a, и третья ведущая шестерня Go3, зацепленная с ведущей шестерней четвертой скорости G4a и с ведущей шестерней пятой скорости G5a.
Первый входной вал 4 предоставляет возможность первому механизму SM1 зацепления, который является первым избирающим элементом, способным переключать либо в состояние соединения к стороне третьей скорости, в котором ведущая шестерня третьей передачи G3a и первый входной вал 4 соединены, состояние соединения к стороне седьмой скорости, в котором ведущая шестерня седьмой скорости G7a и первый входной вал 4 соединены, и нейтральное состояние, в котором соединение ведущей шестерни третьей передачи G3a и ведущей шестерни седьмой скорости G7a к первому входному валу 4 отключено.
Первый входной вал 4 дополнительно снабжен четвертым механизмом SM4 зацепления, который является первым избирающим элементом, способным переключать либо в состояние соединения к стороне пятой скорости, в котором ведущая шестерня пятой скорости и первый входной вал 4 соединены, и нейтральное состояние, в котором соединение ведущей шестерни пятой передачи G5a к первому входному валу 4 отключено.
Второй входной вал 5 предоставляет возможность второму механизму SM2 зацепления, который является вторым избирающим элементом, способным переключать либо в состояние соединения к стороне второй скорости, в котором ведущая шестерня второй передачи G2a и второй входной вал 5 соединены, состояние соединения к стороне шестой скорости, в котором ведущая шестерня шестой скорости G6a и второй входной вал 5 соединены, и нейтральное состояние, в котором соединение ведущей шестерни второй передачи G2a и ведущей шестерни шестой скорости G6a ко второму входному валу 5 отключено.
Второй входной вал 5 дополнительно снабжен пятым механизмом SM5 зацепления, который является вторым избирающим элементом, способным переключать либо в состояние соединения к стороне четвертой скорости, в котором ведущая шестерня четвертой скорости и второй входной вал 5 соединены, и нейтральное состояние, в котором соединение ведущей шестерни четвертой передачи G4a ко второму входному валу 5 отключено.
Гибридное транспортное средство, оборудованное автоматической трансмиссией 1А, сконфигурированное, как пояснено выше, способно осуществлять запуск IMA и движение ENG, движение HEV и движение EV в состоянии, когда семь ступеней передней скорости и ступень задней скорости соответственно установлены, и управление остановкой холостого хода и управление во время движения EV исполняются устройством ECU управления мощностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2011 |
|
RU2544448C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2557103C1 |
| БЛОК УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2542849C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ДВИГАТЕЛЯ ДЛЯ ГИБРИДНОГО АВТОМОБИЛЯ | 2010 |
|
RU2499704C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2555382C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2010 |
|
RU2563293C2 |
| ТРАНСПОРТНАЯ ПРИВОДНАЯ СИСТЕМА | 2010 |
|
RU2510337C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2610927C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2013 |
|
RU2643901C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
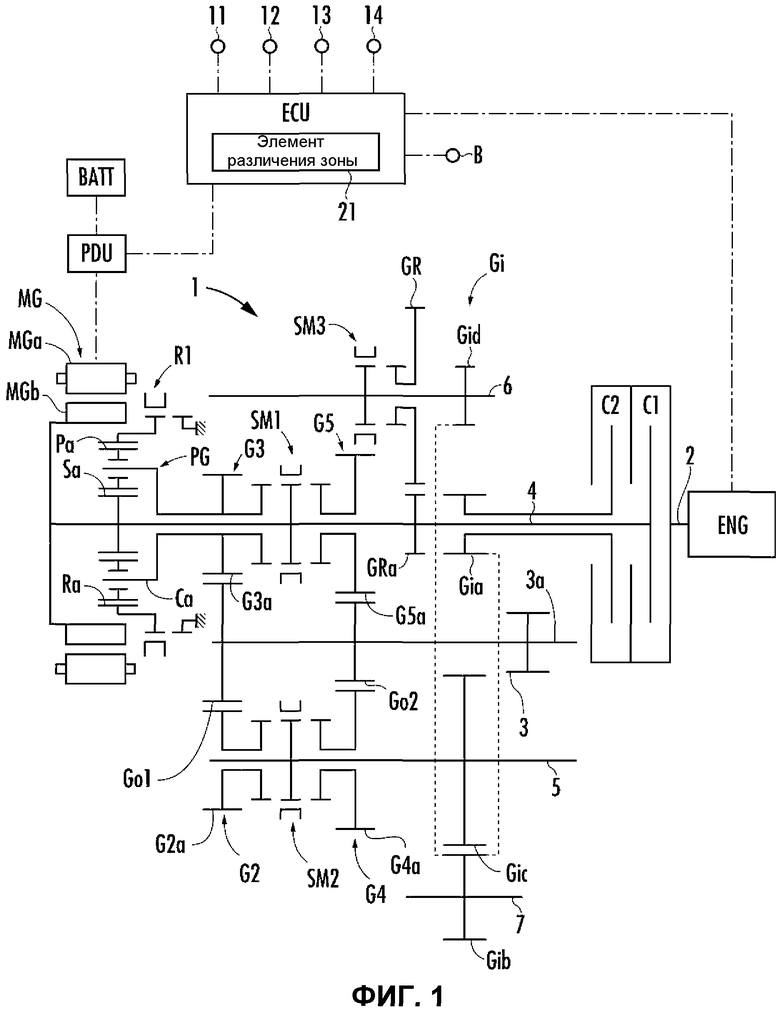
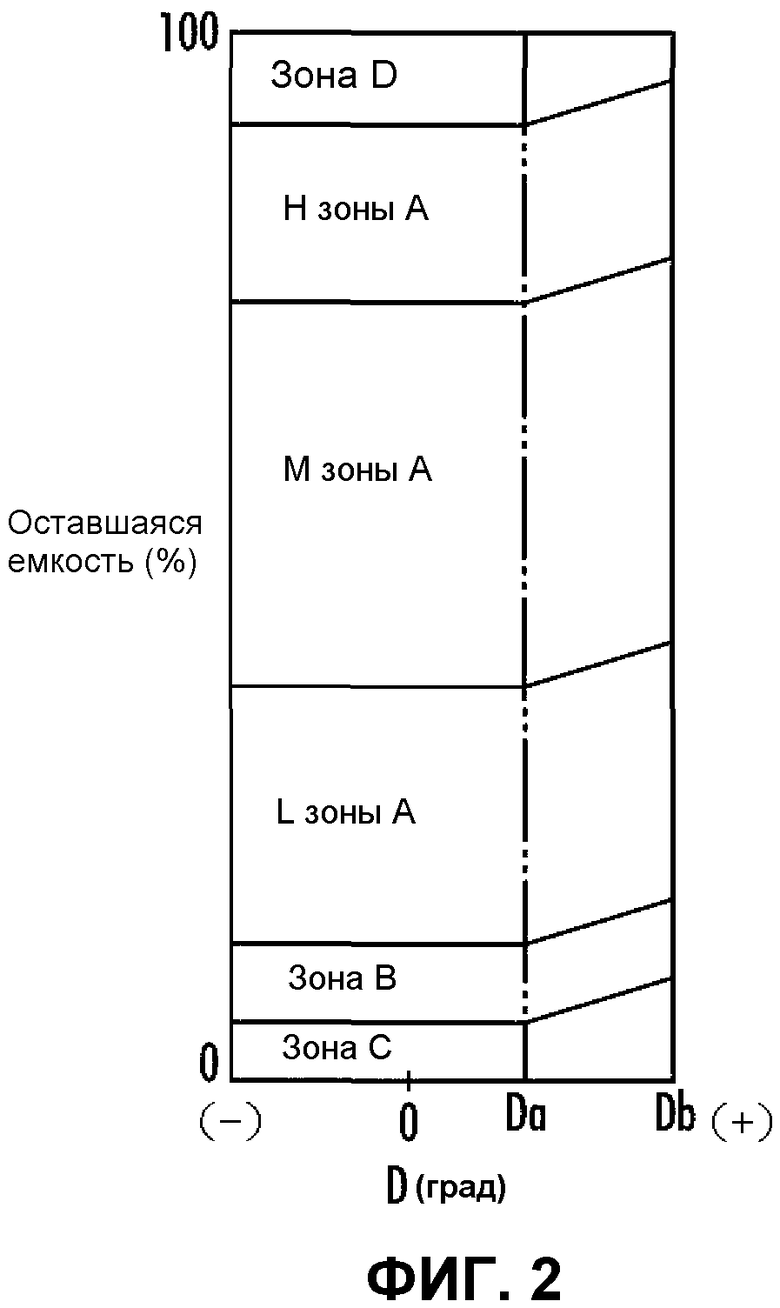

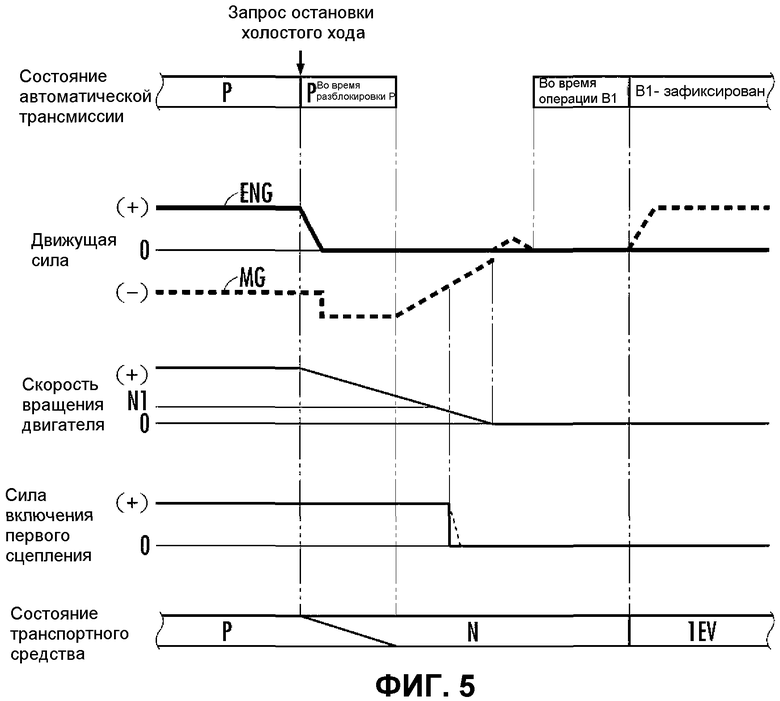
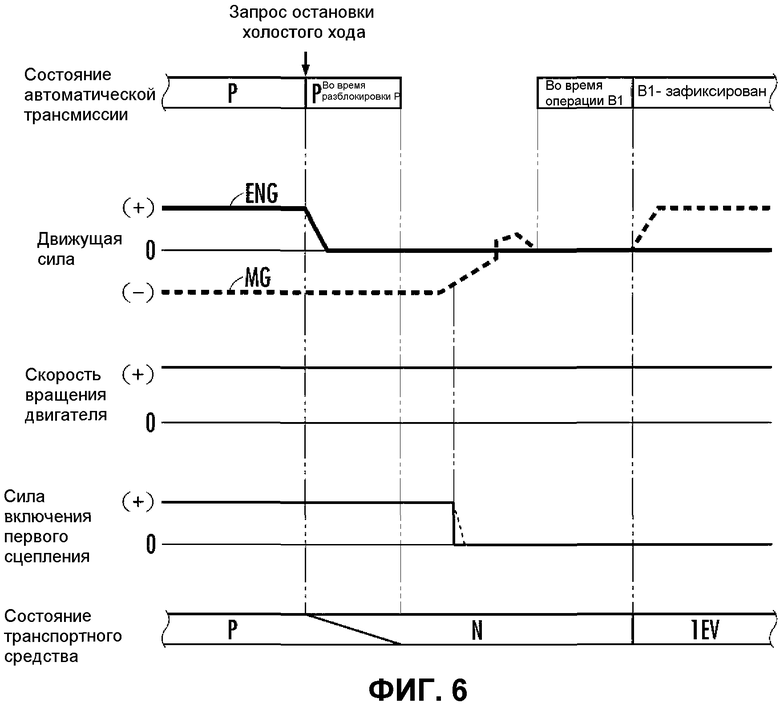
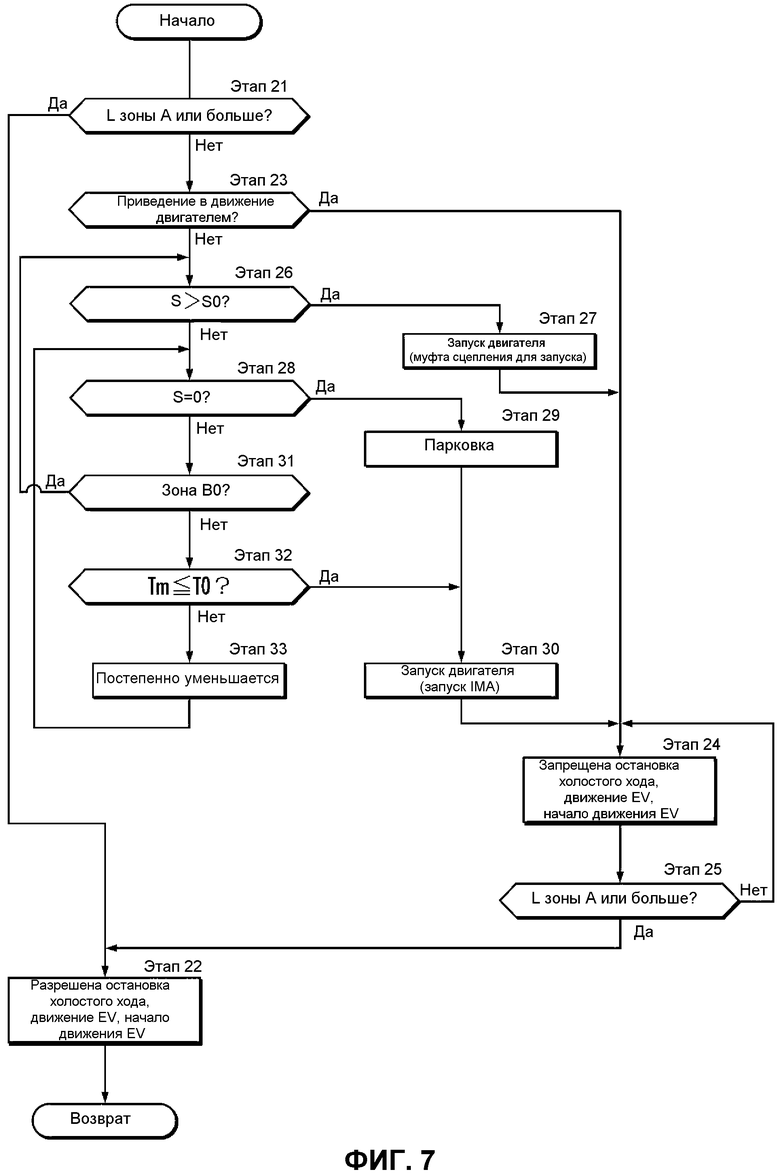
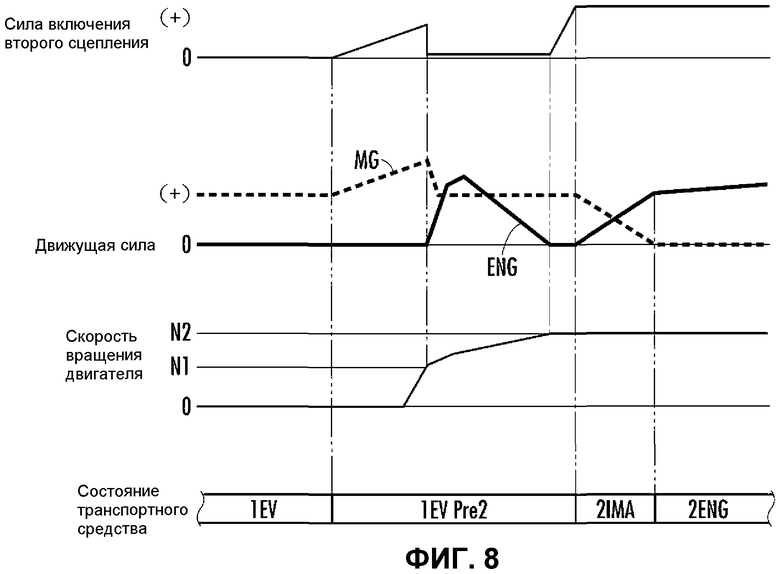
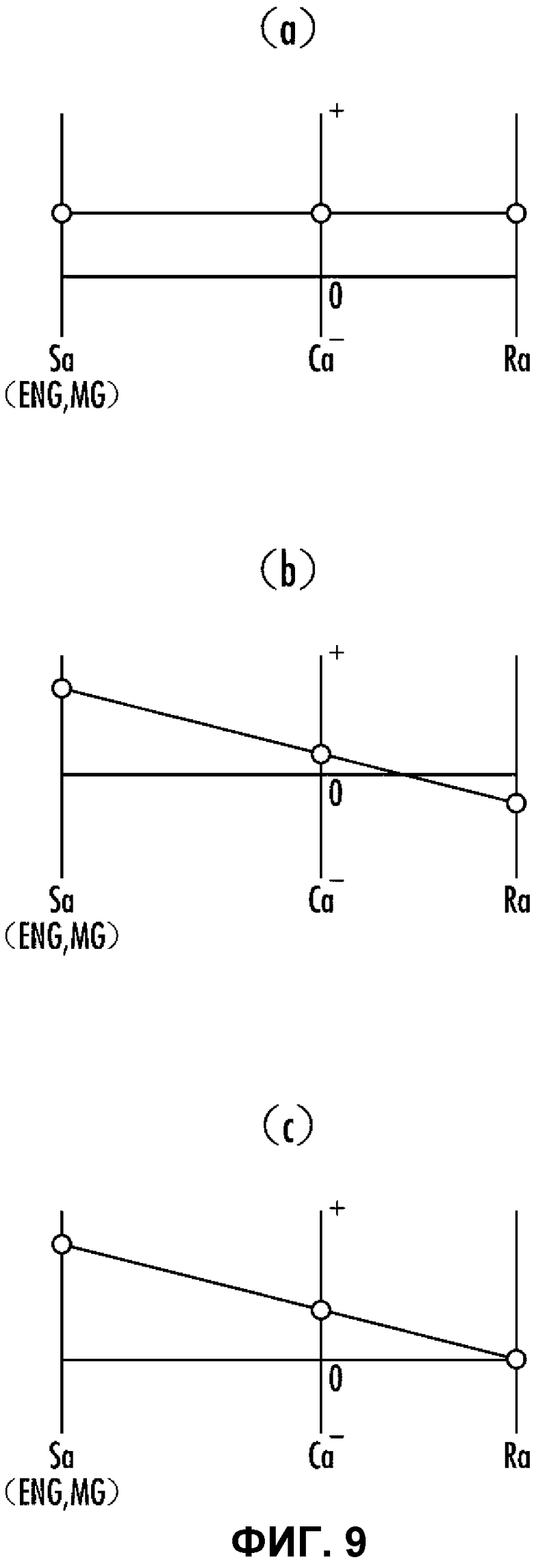
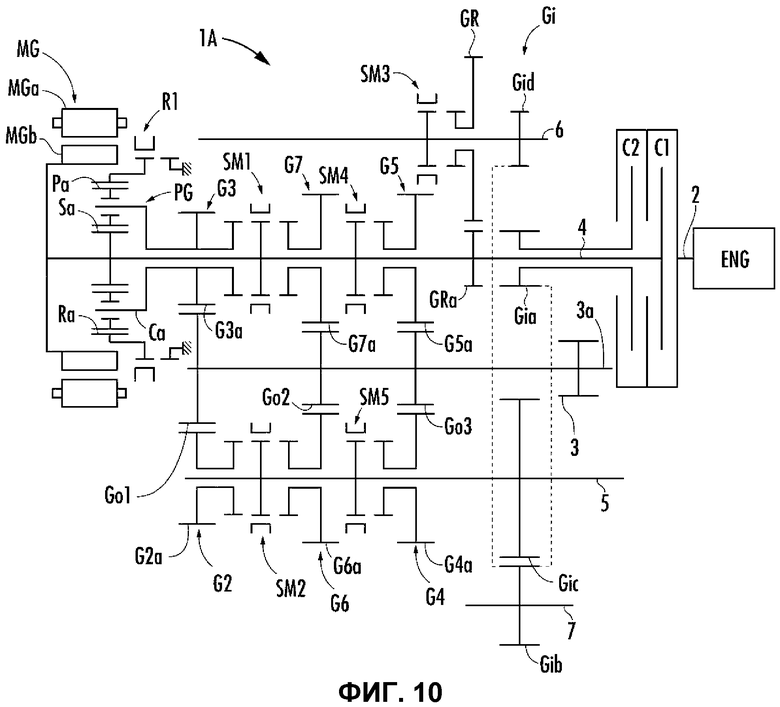
Группа изобретений относится к гибридным транспортным средствам. Гибридное транспортное средство содержит двигатель внутреннего сгорания, электродвигатель, устройство накопления электроэнергии и автоматическую трансмиссию. Также имеется элемент детектирования зоны разряда устройства накопления электроэнергии и элемент управления остановкой холостого хода. В другом варианте, гибридное транспортное средство содержит элемент детектирования оставшейся емкости устройства накопления электроэнергии, элемент детектирования скорости транспортного средства и элемент управления. Достигается получение движущей силы при малых значениях емкости накопителя электроэнергии. 2 н. и 7 з.п. ф-лы, 10 ил.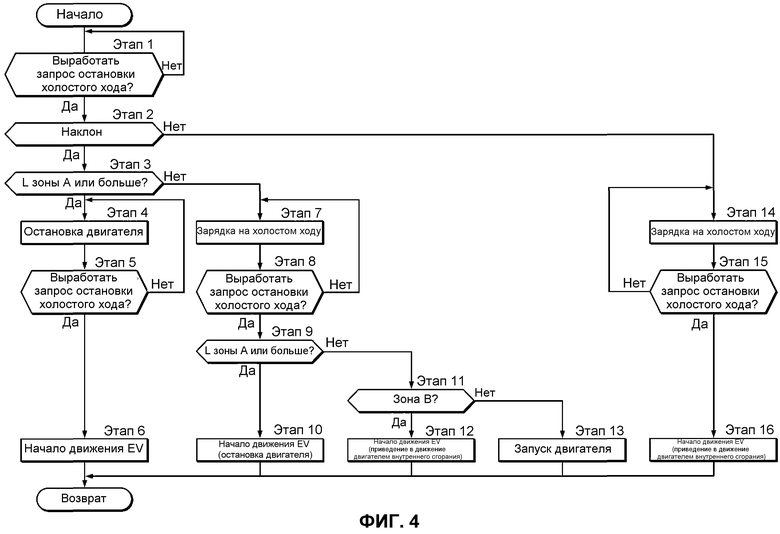
1. Гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания;
электродвигатель;
устройство накопления электроэнергии, предоставляющее и принимающее электрическую мощность к и из электродвигателя;
автоматическую трансмиссию, включающую в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения, и который подключен к электродвигателю, второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, присоединяющий элемент, который присоединяет первый входной вал или второй входной вал избирательно к выходному валу, причем движущая выходная мощность двигателя внутреннего сгорания и электродвигателя переключается и передается на выходной вал;
элемент различения зоны, который детектирует оставшуюся емкость устройства накопления электроэнергии и различает, на основе детектированной оставшейся емкости, стандартную зону, зону ограниченного разряда, в которой оставшаяся емкость меньше чем в стандартной зоне, и зону запрещенного разряда, в которой оставшаяся емкость меньше, чем в зоне ограниченного разряда; и
элемент управления остановкой холостого хода, который управляет так, чтобы осуществлять зарядку устройства накопления электроэнергии, когда вырабатывается запрос остановки холостого хода, в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда или зоной запрещенного разряда, установкой первого элемента переключения в подключенное состояние наряду с сохранением приведения в движение от двигателя внутреннего сгорания так, чтобы вращать первый входной вал и, после этого, когда вырабатывается запрос остановки холостого хода, в случае, когда зона, различенная посредством элемента различения зоны, является стандартной зоной, управляет запуском в движение транспортного средства наряду с установкой двигателя внутреннего сгорания в остановленное состояние и электродвигателя в возбужденное состояние, в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда, управляет запуском в движение транспортного средства посредством возбуждения электродвигателя наряду с продолжением приведения в движение от двигателя внутреннего сгорания и сохранением первого элемента переключения в разомкнутом состоянии, и в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда, управляет запуском в движение транспортного средства посредством сохранения приведения в движение от двигателя внутреннего сгорания и установки первого элемента переключения в замкнутое состояние.
2. Гибридное транспортное средство по п.1,
в котором присоединяющий элемент включает в себя первый избирающий элемент, который избирательно соединяет первый входной вал и выходной вал, второй избирающий элемент, который избирательно соединяет второй входной вал и выходной вал и дифференциальный вращательный механизм, который сконфигурирован из первого вращательного элемента, который подсоединен к первому входному валу, второй вращательный элемент, который присоединен к выходному валу, и третий вращательный элемент, предусмотренный с элементом блокировки, так чтобы иметь возможность дифференциального взаимного вращения, и
элемент управления остановкой холостого хода управляет так, чтобы осуществлять заряд устройства накопления электроэнергии, когда вырабатывается запрос остановки холостого хода, в случае, когда зона, различенная элементом различения зоны, является зоной ограниченного разряда или зоной запрещенного заряда, установкой первого элемента переключения в соединенное состояние наряду с сохранением приведения в движение от двигателя внутреннего сгорания, и вращение первого входного вала установкой третьего вращательного элемента в разблокированное состояние блокировки элементом блокировки, и после этого, когда вырабатывается запрос остановки холостого хода, управляет так, чтобы осуществить запуск в движение транспортного средства после установки, элементом блокировки, третьего вращательного элемента в заблокированное состояние.
3. Гибридное транспортное средство по п.1,
дополнительно содержащее элемент детектирования наклона, который детектирует наклон поверхности дороги, с которой контактирует транспортное средство,
причем присоединяющий элемент включает в себя первый избирающий элемент, который избирательно соединяет первый входной вал и выходной вал, второй избирающий элемент, который избирательно соединяет второй входной вал и выходной вал и дифференциальный вращательный механизм, который сконфигурирован из первого вращательного элемента, который соединен с первым входным валом, второго вращательного элемента, который соединен с выходным валом и третьего вращательного элемента, предусмотренного с элементом блокировки, так чтобы иметь возможность взаимного дифференциального вращения, и
элемент управления остановкой холостого хода управляет так, чтобы осуществлять зарядку устройства накопления электроэнергии, когда вырабатывается запрос остановки холостого хода, в случае, когда наклон, детектированный элементом детектирования наклона превышает пороговое значение, установкой первого элемента переключения в соединенное состояние наряду с продолжением приведения в движение от двигателя внутреннего сгорания, и вращением первого входного вала и, после этого, когда вырабатывается запрос остановки холостого хода, управляет, чтобы осуществить запуск в движение транспортного средства посредством возбуждения электродвигателя, наряду с сохранением приведения в движение от двигателя внутреннего сгорания и наряду с сохранением первого элемента переключения в разомкнутом состоянии.
4. Гибридное транспортное средство, содержащее:
двигатель внутреннего сгорания;
электродвигатель;
устройство накопления электроэнергии, предоставляющее и принимающее электрическую мощность к и из электродвигателя;
автоматическую трансмиссию, включающую в себя первый входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через первый элемент переключения и который подключен к электродвигателю, второй входной вал, который передает движущую силу двигателя внутреннего сгорания избирательно через второй элемент переключения, выходной вал, соединенный с первым входным валом или вторым входным валом, первый избирающий элемент, который соединяет первый входной вал и выходной вал посредством зубчатой передачи, выбранной из множества зубчатых передач, и второй избирающий элемент, который соединяет второй входной вал и выходной вал посредством зубчатой передачи, выбранной из множества зубчатых передач, причем движущая выходная мощность двигателя внутреннего сгорания и электродвигателя переключается и передается на выходной вал;
элемент детектирования оставшейся емкости, который детектирует оставшуюся емкость устройства накопления электроэнергии;
элемент детектирования скорости транспортного средства, который детектирует скорость движения транспортного средства; и
элемент управления, который, когда первый избирающий элемент находится в соединенном состоянии, когда первый входной вал и выходной вал соединены выбранной зубчатой передачей, и когда транспортное средство осуществляет движение только движущей силой электродвигателя, в случае, когда скорость транспортного средства, детектированная элементом детектирования скорости транспортного средства, становится равной или ниже, чем пороговое значение и оставшаяся емкость, детектированная элементом детектирования оставшейся емкости, становится равной или меньше, чем пороговое значение, управляет двигателем внутреннего сгорания для запуска, посредством первого постепенного снижения движущей силы электродвигателя до тех пор, пока соединенное состояние первого избирающего элемента не станет разъединяемым, затем разъединения соединенного состояния первого избирающего элемента, и установки первого элемента переключения в соединенное состояние.
5. Гибридное транспортное средство по п.4,
дополнительно содержащее тормоз, который тормозит движение транспортного средства;
причем элемент управления управляет двигателем внутреннего сгорания для запуска, когда транспортное средство останавливается во время постепенного уменьшения движущей силы электродвигателя, посредством установки первого элемента переключения в соединенное состояние, когда движущая сила электродвигателя становится приблизительно равной нулю, наряду с сохранением, посредством тормоза, остановленного состояния транспортного средства.
6. Гибридное транспортное средство по п.4,
дополнительно содержащее тормоз, который тормозит движение транспортного средства;
причем элемент управления управляет двигателем внутреннего сгорания для запуска, когда транспортное средство останавливается перед запуском двигателя внутреннего сгорания, посредством действия тормоза для создания нулевой движущей силы электродвигателя, а также установки первого элемента переключения в соединенное состояние.
7. Гибридное транспортное средство по любому из пп.4-6,
дополнительно содержащее элемент детектирования наклона, который детектирует наклон поверхности дороги, с которой контактирует транспортное средство,
причем пороговое значение оставшейся емкости установлено согласно наклона, детектированного элементом детектирования наклона.
8. Гибридное транспортное средство по любому из пп.4-6,
в котором элемент управления снижает уменьшение скорости движущей силы во время постепенного уменьшения движущей силы электродвигателя, так как скорость транспортного средства, детектированная элементом детектирования скорости транспортного средства, становится быстрее.
9. Гибридное транспортное средство по п.7,
в котором элемент управления снижает уменьшение скорости движущей силы во время постепенного уменьшения движущей силы электродвигателя, так как скорость транспортного средства, детектированная элементом детектирования скорости транспортного средства, становится быстрее.
| JP 2009166567 A, 30.07.2009 | |||
| JP 2009107502 A, 21.05.2009 | |||
| JP 2008296897 A, 11.12.2008 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ВЫДАЧИ МОЩНОСТИ | 2005 |
|
RU2334624C2 |

