Настоящая заявка относится к согласованию импеданса высокой радиочастотной (RF) мощности. Конкретное применение относится к развязке или согласованию импеданса RF-усилителей мощности с многоэлементными передающими катушками в системах магнитного резонанса.
Системы магнитно-резонансной визуализации (MRI) и спектроскопии (MRS) часто используются для исследования и лечения пациентов. Посредством такой системы ядерные спины предназначенной для исследования ткани тела выравниваются статическим основным магнитным полем B0 и возбуждаются поперечными магнитными полями Β1, осциллирующими в полосе радиочастот. При визуализации сигналы релаксации подвергаются воздействию градиентных магнитных полей для локализации получающегося в результате резонанса. Сигналы релаксации принимаются и восстанавливаются до одно- или многомерного изображения. При спектроскопии информация о составе ткани переносится в частотном компоненте резонансных сигналов.
Широко используются MR-системы двух типов, включая «открытые» MR-системы (вертикальная система) и системы «туннельного типа». В первых системах пациент помещается в зону исследования, которая расположена между двумя магнитными полюсами, соединенными посредством С-образного блока. Доступ к пациенту во время исследования или лечения может осуществляться практически со всех сторон. Более поздние системы содержат цилиндрическое пространство исследований (осевая система), в которое помещается пациент.
Система RF-катушек обеспечивает передачу RF-сигналов и прием резонансных сигналов. В дополнение к системе RF-катушек, которая стационарно встроена в устройство визуализации, катушки специального назначения могут быть нежестко скомпонованы вокруг или в конкретной исследуемой области. Катушки специального назначения конструируются для оптимизации отношения сигнал-шум (SNR), в особенности в ситуациях, когда требуется гомогенность возбуждения и высокая чувствительность детектирования. Кроме того, специальные последовательности RF-сигналов, более высокие напряженности магнитного поля, высокие углы отклонения или последовательности в реальном времени могут быть осуществлены и сгенерированы многоканальными антенными устройствами и могут быть ускорены многомерные возбуждения.
В системах многоэлементных передающих катушек (multix) каждый отдельный катушечный элемент соединен с RF-усилителем мощности. Multix-системы могут улучшать гомогенность магнитного поля B1 и снижать удельный коэффициент поглощения (SAR) для пациентов, что позволяет осуществлять функционирование с более высокими напряженностями поля, например 2 Тесла (Тл) или выше. В результате непосредственного соединения отдельных катушек с RF усилителем мощности при более высоких напряженностях поля возникают некоторые проблемы. Усилители мощности предварительно настроены на выбранные импедансы, например 50 Ом. Цепи согласования осуществляют согласование импеданса каждого катушечного элемента с предварительно выбранным импедансом. Однако пациент изменяет нагрузку на катушечные элементы, что изменяет их импеданс и приводит к рассогласованию импедансов. При рассогласовании импедансов RF-мощность отражается назад в усилитель мощности, что приводит к бесполезной растрате мощности, предназначенной для доставки в катушечный элемент. Это приводит к недостаточной изоляции между отдельными катушечными элементами и, следовательно, к недостаточной развязке на выходном порте усилителя мощности, что в конечном итоге приводит к нелинейному отклику на усилитель мощности.
Для решения проблем с развязкой усилителя мощности были введены волноводные циркуляторы или вентили. Циркуляторы представляют собой базовые трехпортовые необратимые компоненты, используемые для разделения падающих и отраженных волн. При создании намагничивающего поля внутри их ферритового сердечника изолированными проводящими обмотками генерируется гиромагнитный эффект, который может быть использован для циркуляции сигнала от одного порта к другому. Падающий сигнал циркулирует только в одном направлении, а именно по часовой стрелке или против часовой стрелки, пока не достигает следующего порта. Если один из портов завершается в согласованной нагрузке, то циркулятор действует как вентиль, с высокими потерями в одном направлении и низкими потерями в другом направлении. Следовательно, в обратном направлении порты развязаны друг от друга, и распространение сигнала ограничивается. Магнитные ферритовые сердечники являются наиболее популярным материалом для создания пассивных циркуляторов из-за их отличной (RF) производительности и отсутствия движущихся частей. Необходимый отклик появляется в пределах конкретного диапазона частот, который может быть получен посредством модуляции размеров ферритового сердечника и амплитуды статического магнитного поля, то есть для большей мощности необходим больший сердечник.
Циркуляторы высокой мощности, такие как используемые в MR-системах, являются дорогостоящими в проектировании и производстве. Для них требуются большие ферритовые сердечники и сложные системы теплообмена, которые включают в себя теплоотводы и дорогие теплопроводные материалы с низкими диэлектрическими постоянными для предотвращения формирования дуговых разрядов. Дополнительная нагрузка требуется для индуцирования гиромагнитного эффекта в больших по размеру ферритовых сердечниках. Из-за эффектов насыщения в ферритовом сердечнике и присущей им магнитной природы циркуляторы должны быть размещены на удалении от основного магнита MR. Это вынуждает размещать RF-усилители мощности на еще большем расстоянии, что может увеличить и без того высокую стоимость RF-энергии и повысить сложность укладки кабелей в помещении для MR. Кроме того, во время функционирования циркулятора отраженная RF-мощность нагревает ферритовый сердечник и приводит к ненадежности функционирования, что может привести к нелинейности RF-усилителя мощности и снижению развязки на портах усилителя.
В настоящей заявке предоставлены новые и улучшенные устройство и способ автоматической настройки и согласования, которые преодолевают отмеченные выше и другие проблемы.
В соответствии с одним из аспектов устройство автоматической настройки и согласования содержит датчик отраженной мощности, который детектирует мощность, отраженную от нагрузки, и LC-цепь согласования, включенную последовательно с нагрузкой, программируемую на минимизацию отраженной мощности.
В соответствии с другим аспектом9 способ для согласования импеданса содержит детектирование отраженной от нагрузки мощности и программирование LC-цепи согласования для минимизации отраженной мощности.
Одно из преимуществ заключается в увеличении отношения сигнал-шум (SNR).
Еще одно преимущество заключается в снижении требований к радиочастотной (RF) мощности.
Еще одно преимущество заключается в снижении сложности системы.
Еще одно преимущество заключается в снижении производственных издержек.
Еще одно преимущество заключается в снижении времени сканирования.
Другие дополнительные преимущества настоящего изобретения будут понятны специалистам в данной области техники после прочтения и понимания приведенного ниже подробного описания.
Изобретение может иметь форму различных компонентов и компоновок компонентов и различных этапов и компоновок этапов. Чертежи приведены только в целях иллюстрации предпочтительных вариантов осуществления и не рассматриваются как ограничивающие изобретение.
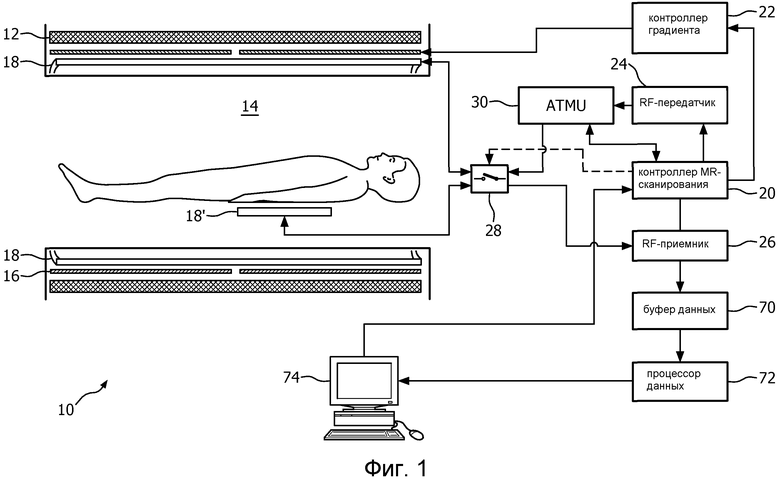
Фигура 1 представляет собой схематическую иллюстрацию одного из аспектов магнитно-резонансной системы с блоком автоматической настройки и согласования.
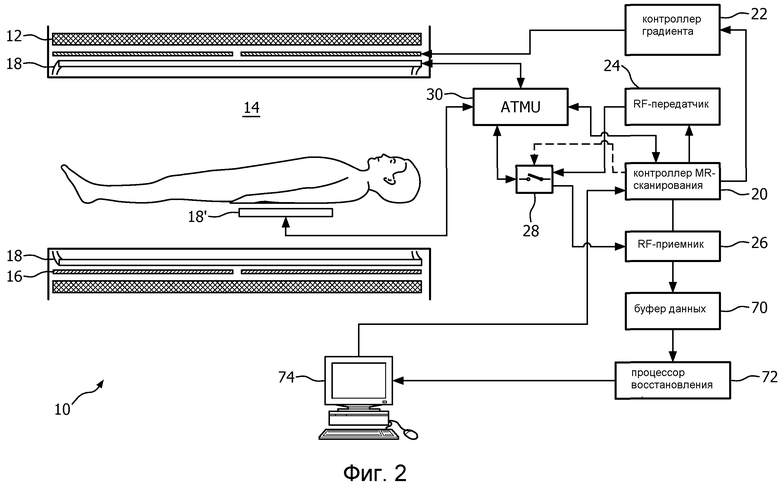
Фигура 2 представляет собой схематическую иллюстрацию еще одного аспекта магнитно-резонансной системы с блоком автоматической настройки и согласования.
Фигура 3 представляет собой схематическую иллюстрацию блока автоматической настройки и согласования.
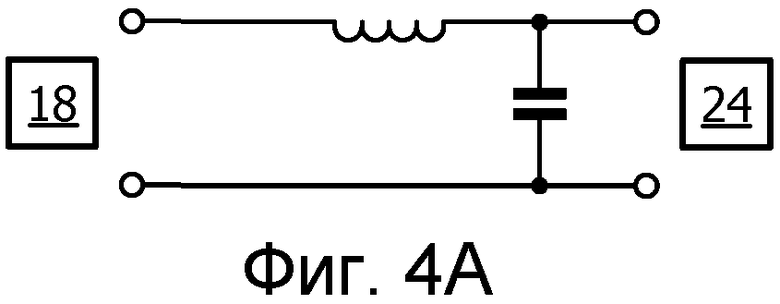
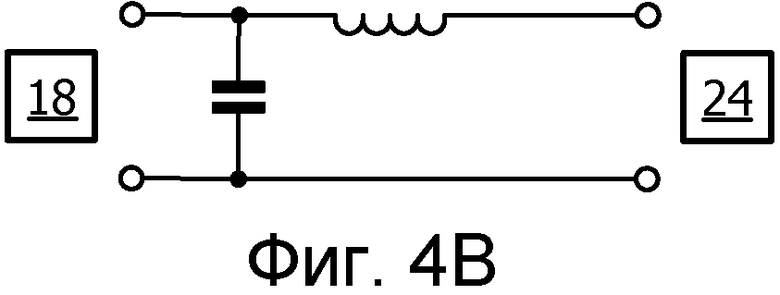
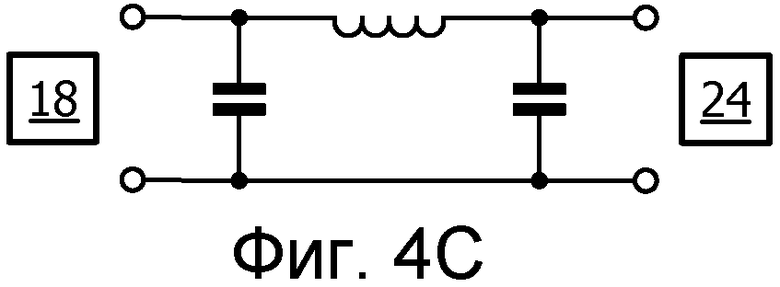
Фигуры 4A-4C представляют собой принципиальные схемы конфигураций цепи согласования блока автоматической настройки и согласования.
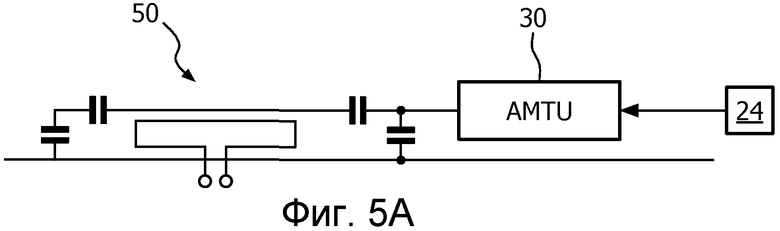
Фигура 5A представляет собой схематическую иллюстрацию поперечной электромагнитной (TEM) катушки с интегрированным блоком автоматической настройки и согласования.
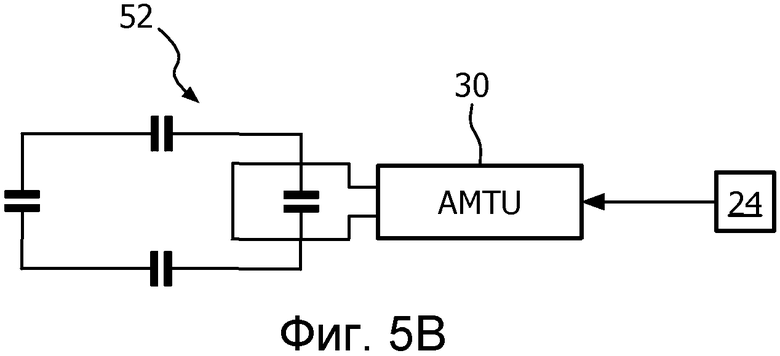
Фигура 5B представляет собой схематическую иллюстрацию контурной катушки с интегрированным блоком автоматической настройки и согласования.
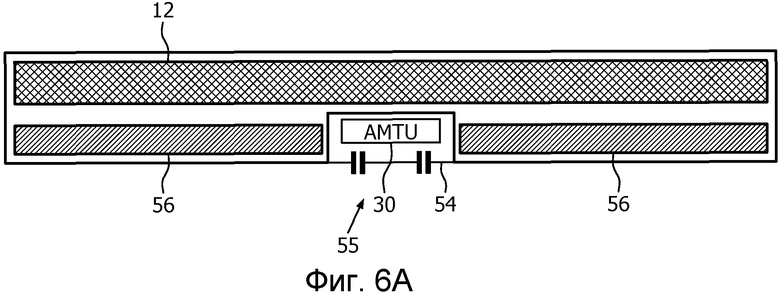
Фигура 6A представляет собой схематическую иллюстрацию части магнитно-резонансной системы с имеющей углубление градиентной катушкой.
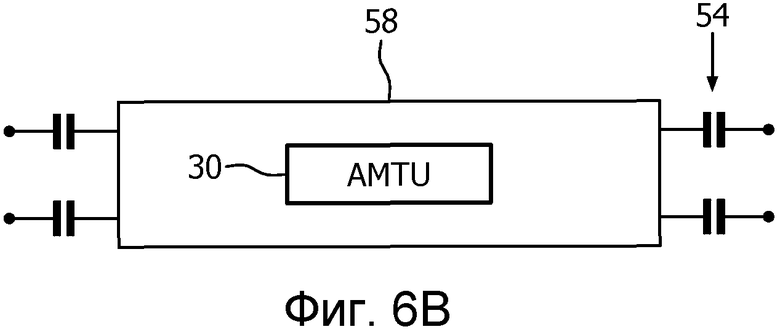
Фигура 6B представляет собой схематическую иллюстрацию катушечного элемента с интегрированным блоком автоматической настройки и согласования.
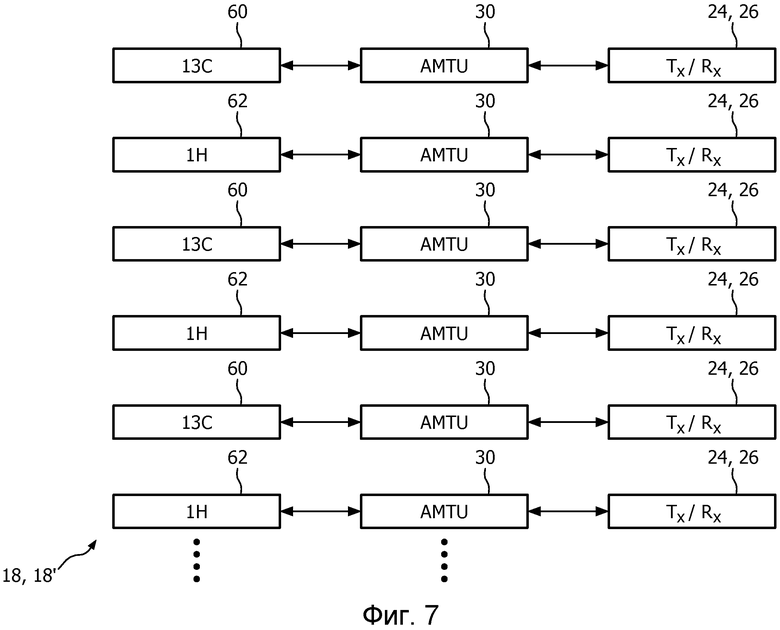
Фигура 7 представляет собой схематическую иллюстрацию одного из аспектов сборки многочастотной RF-катушки с блоком автоматической настройки и согласования.
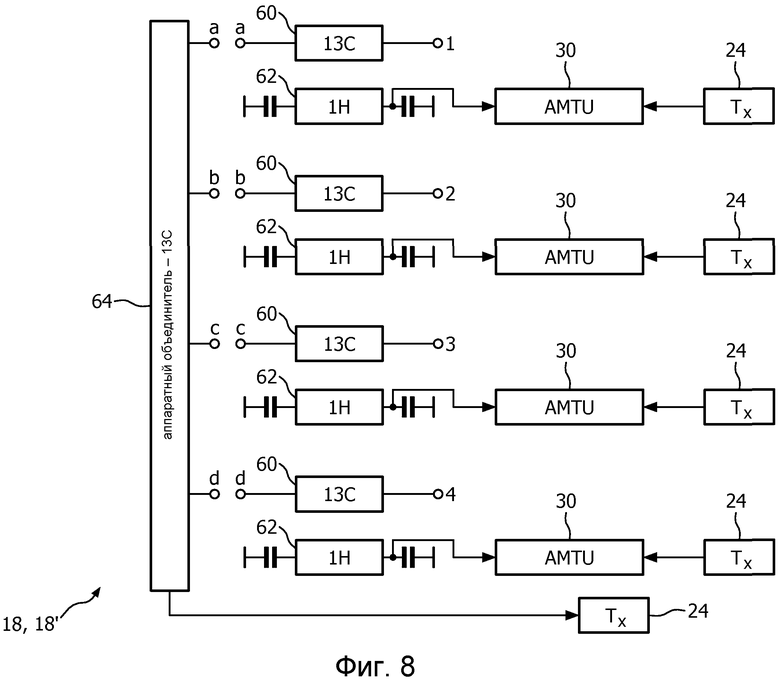
Фигура 8 представляет собой схематическую иллюстрацию еще одного аспекта сборки многочастотной RF-катушки с блоком автоматической настройки и согласования; и
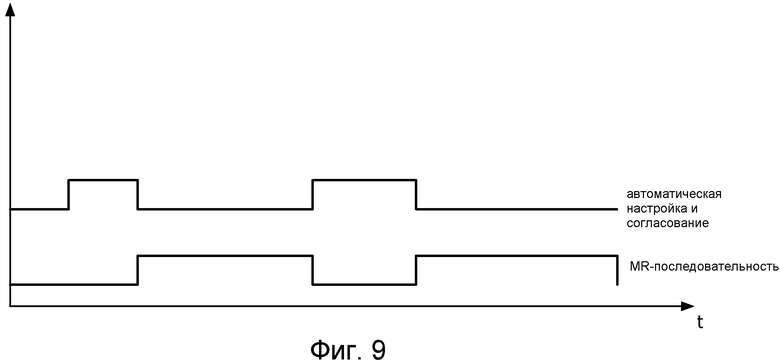
фигура 9 представляет собой временную диаграмму последовательности MR и автоматической настройки согласования.
Обратимся к фигуре 1; система 10 магнитно-резонансной (MR) визуализации включает в себя основной магнит 12, который генерирует однородное по времени поле B0 в области 14 исследования. Основной магнит может быть магнитом кольцевого или туннельного типа, С-образным открытым магнитом, может быть открытым магнитом другой конструкции и т.п. Катушки 16 градиентного магнитного поля, расположенные смежно с основным магнитом, служат для генерирования градиентов магнитного поля вдоль выбранных осей относительно магнитного поля B0 для пространственного кодирования сигналов магнитного резонанса, для создания гасящих намагниченность градиентов поля и т.п. Катушка 16 градиентного магнитного поля может включать в себя сегменты катушки, сконфигурированные для создания градиентов магнитного поля в трех ортогональных направлениях, обычно продольном, или z, поперечном, или x, и вертикальном, или y-направлениях.
Сборка 18 радиочастотных (RF) катушек, такая как радиочастотная катушка на все тело, размещается смежно с областью исследования. Сборка RF-катушек генерирует радиочастотные импульсы Β1 для возбуждения магнитного резонанса в выровненных диполях субъекта. Сборка 18 радиочастотных катушек также служит для детектирования сигналов магнитного резонанса, исходящих из области визуализации. Необязательно представлены также локальные, поверхностные RF-катушки, RF-катушки головы или in vivo (в живом организме) RF-катушки 18' в дополнение к RF-катушке 18 на все тело для более чувствительного локализованного пространственного кодирования, возбуждения и приема сигналов магнитного резонанса. В многоэлементной сборке RF-катушек сборка RF-катушек включает в себя множество отдельных катушечных элементов для улучшения гомогенности Β1 и снижения удельного коэффициента поглощения (SAR) для субъекта.
Для получения данных магнитного резонанса субъекта субъект помещается внутрь области 14 исследования, предпочтительно в изоцентр основного магнитного поля или вблизи него. Контроллер 20 сканирования управляет контроллером 22 градиента, который предписывает градиентным катушкам выдавать выбранные импульсы градиента магнитного поля в область визуализации, что может соответствовать выбранной последовательности магнитно-резонансной визуализации или спектроскопии. Контроллер 20 сканирования управляет RF-передатчиком 24, который предписывает сборке RF-катушек генерировать импульсы магнитно-резонансного возбуждения и манипуляции Β1. В многоэлементной сборке RF-катушек RF-передатчик 24 включает в себя множество передатчиков или единственный передатчик с множеством каналов передачи, при этом каждый канал передачи включает в себя RF-усилитель мощности, функционально соединенный с соответствующим катушечным элементом в сборке катушек. В схеме с одной катушкой единственный канал передачи включает в себя единственный RF-усилитель мощности, который генерирует сигналы возбуждения и манипуляции.
Контроллер сканирования также управляет RF-приемником 26, который соединен со сборкой RF-катушек, для приема сгенерированных сигналов магнитного резонанса от нее. В многоэлементной сборке RF-катушек RF-приемник 26 включает в себя множество приемников или единственный приемник с множеством каналов приема, при этом каждый канал приема включает в себя предварительный усилитель, функционально соединенный с соответствующим катушечным элементом в сборке катушек. В схеме с одной катушкой единственный канал приема включает в себя единственный предварительный усилитель, который усиливает принятые сигналы магнитного резонанса.
Контроллер сканирования также управляет блоком 28 переключения, который переключает сборку 18, 18' RF-катушек между режимом передачи и режимом приема посредством избирательного соединения сборки 18, 18' RF-катушек с RF-передатчиком 24 или RF-приемником 26. В многоэлементной сборке RF-катушек блок 28 переключения включает в себя множество переключателей, при этом каждый из них избирательно переключает отдельный катушечный элемент на один из соответствующих RF-каналов передачи RF-передатчика 24 или на один из соответствующих RF-каналов приема RF-приемника 26.
Обычно до осуществления сборки MR-системы отдельные катушечные элементы сборки RF-катушек настраиваются для согласования с выходным портом соответствующего RF-усилителя мощности. Однако при высоких напряженностях поля, например 2 Тесла (Тл) или выше, субъект изменяет нагрузку на каждый из отдельных катушечных элементов, что изменяет их импеданс. Рассогласование импедансов может вызывать полное или частичное отражение сгенерированного RF-усилителем мощности сигнала назад в RF-передатчик 24, что приводит к потере дорогостоящей RF-энергии, возможному искажению падающего сигнала и возможному повреждению RF-передатчика.
В первом аспекте блок автоматической настройки и согласования (ATMU) 30 размещен между RF-передатчиком 24 и блоком 28 переключения. В многоэлементной сборке RF-катушек ATMU 30 включает в себя множество ATMU, при этом каждый ATMU размещен между соответствующим RF-каналом передачи RF-передатчика 24 и соответствующим переключателем блока 28 переключения. Когда MR-система 10 находится в режиме передачи, блок 28 переключения избирательно подключает RF-передатчик 24 к сборке 18, 18' RF-катушек. Каждый ATMU 30 детектирует рассогласование импеданса между каждым катушечным элементом сборки 18, 18' RF-катушек и каждым соответствующим RF-усилителем мощности RF-передатчика 24. Контроллер 20 сканера управляет ATMU для компенсирования исключенной части детектированного рассогласования импеданса или всего отраженного сигнала.
Обратимся к фигуре 2; во втором аспекте ATMU 30 размещен между блоком 28 переключения и сборкой 18, 18' RF-катушек. Когда MR-система 10 находится в режиме передачи, блок 28 переключения избирательно подключает RF-передатчик 24 к сборке 18, 18' RF-катушек, и ATMU 30 детектирует и компенсирует рассогласования импеданса между сборкой 18, 18' RF-катушек и RF-передатчиком 24 или, в случае многоэлементной сборки RF-катушек, между каждым катушечным элементом сборки 18, 18' RF-катушек и каждым соответствующим RF-усилителем мощности RF-передатчика 24. Когда MR-система 10 находится в режиме приема, блок 28 переключения избирательно подключает RF-приемник 26 к сборке 18, 18' RF-катушек, и ATMU 30 детектирует и компенсирует рассогласование импеданса между сборкой 18, 18' RF-катушек и RF-приемником 26, или, в случае многоэлементной сборки RF-катушек, между каждым катушечным элементом сборки 18, 18' RF-катушек и каждым соответствующим предварительным усилителем RF-приемника 26.
Обратимся к фигуре 3; каждый ATMU 30 включает в себя датчик 32 отраженной мощности, который детектирует рассогласование импеданса. Датчик 32 отраженной мощности может детектировать рассогласование импеданса и амплитуды различными способами, например посредством определения коэффициента стоячей волны по напряжению (VSWR) и т.п. ATMU включает в себя матрицу 34 катушек индуктивности, включенную последовательно между сборкой 18, 18' RF-катушек и RF-передатчиком/приемником 24, 26, и матрицу 36 конденсаторов, включенную параллельно между сборкой 18, 18' RF-катушек и RF-передатчиком/приемником 24, 26. Матрица 34 катушек индуктивности и матрица 36 конденсаторов формируют LC-схему согласования, и следует понимать, что также предполагается матрица катушек индуктивности, включенная параллельно, и матрица конденсаторов, включенная последовательно между сборкой 18, 18' RF-катушек и RF-передатчиком/приемником 24, 26.
Контроллер 38 матриц управляет матрицей 34 катушек индуктивности и матрицей 36 конденсаторов для компенсирования детектированного рассогласования импеданса. Матрица 34 катушек индуктивности включает в себя множество катушек индуктивности различных величин, при этом каждая катушка индуктивности подключена к соответствующему переключателю, который избирательно переключает катушку индуктивности в одно из активного или неактивного состояния. Аналогично матрица 36 конденсаторов включает в себя множество конденсаторов различных величин, при этом каждый конденсатор подключен к соответствующему переключателю, который избирательно переключает катушку индуктивности в одно из активного или неактивного состояния. Контроллер 38 матриц управляет переключением как матрицы 34 катушек индуктивности, так и матрицы 36 конденсаторов. Таким образом, матрица 34 катушек индуктивности может устанавливать множество индуктивностей, и матрица 36 конденсаторов может устанавливать множество емкостей. Контроллер 38 матриц также управляет переключателем 40 схемы, который изменяет конфигурацию LC-цепи согласования на одну из обратной Г-образной схемы (фигура 4A), прямой Г-образной схемы (фигура 4B) или П-образной схемы (фигура 4C).
Контроллер 38 матриц включает в себя справочную таблицу (LUT) 42 и блок 44 памяти. Справочная таблица ассоциирует известное рассогласование импеданса, которое хранится в блоке 44 памяти, с соответствующей программой матрицы катушек индуктивности и/или программой матрицы конденсаторов, которые также хранятся в блоке 44 памяти. Следует понимать, что множество известных рассогласований и соответствующих программ матриц катушек индуктивности и/или конденсаторов хранятся в блоке 44 памяти. Программы матриц катушек индуктивности и конденсаторов инструктируют контроллер 38 матриц, какими переключателями матриц 34, 36 катушек индуктивности и конденсаторов нужно управлять с тем, чтобы они компенсировали известное рассогласование импеданса.
Контроллер 38 матриц сравнивает детектированное рассогласование импеданса с известными рассогласованиями импеданса, хранящимися в блоке 44 памяти. Если детектированное рассогласование импеданса коррелирует с известным рассогласованием импеданса, то контроллер матриц программирует матрицу 34 катушек индуктивности и матрицу 36 конденсаторов в соответствии с программой матрицы катушек индуктивности и программой матрицы конденсаторов, соответственно, которые соответствуют известной матрице импеданса.
Если детектированное рассогласование импеданса не коррелирует с известным хранящимся рассогласованием импеданса, то контроллер 38 матриц сконфигурирован для генерирования соответствующих программ матриц катушек индуктивности и конденсаторов посредством выполнения итераций по множествам индуктивностей и емкостей, устанавливаемых матрицами 34, 36 катушек индуктивности и конденсаторов, до тех пор пока детектированное рассогласование импеданса не будет скомпенсировано. Контроллер 38 матриц сохраняет детектированное рассогласование импеданса как известное рассогласование импеданса и сгенерированные соответствующие программы матриц катушек индуктивности и конденсаторов и затем обновляет LUT 42 для включения в нее ассоциации между только что сохраненным известным рассогласованием импеданса и соответствующими программами матриц катушек индуктивности и конденсаторов. В одном из вариантов осуществления контроллер 38 матриц определяет, какое из известных рассогласований импеданса лучше всего коррелирует с детектированным рассогласованием импеданса или порядком для сокращения количества итераций, требующихся для компенсирования детектированного рассогласования импеданса. Используя эту наиболее близкую корреляцию, контроллер 38 матриц после этого систематически подстраивает соответствующие программы матриц катушек индуктивности и конденсаторов до тех пор, пока не будет скомпенсировано детектированное рассогласование импеданса. Детектированное рассогласование импеданса сохраняется как известное рассогласование импеданса в блок 44 памяти вместе с соответствующими программами матриц катушек индуктивности и конденсаторов, и выполняется обновление LUT 42. Таким образом контроллер матриц конфигурирует цепь согласования из имеющихся индуктивных и емкостных элементов для предоставления схемы, которая наилучшим образом согласует импеданс катушки 18, 18'.
ATMU 30 конструируется из немагнитных материалов, например переключатели матриц катушек индуктивности и конденсаторов являются основанными на MEMS, pin-диодами и т.п. Это позволяет разместить ATMU относительно близко к сборке 18, 18' RF-катушек или отдельным катушечным элементам в многоэлементной системе и, в свою очередь, позволяет разместить RF-передатчик и/или приемник 24, 26 относительно близко к MR-системе 10. Обратимся к фигуре 5A; в одном из вариантов осуществления ATMU 30 размещается смежно с поперечной электромагнитной (TEM) катушкой 50. Обратимся к фигуре 5B; в другом варианте осуществления ATMU 30 размещается смежно с контурной катушкой 52.
Обратимся к фигурам 6A и 6B; в еще одном варианте осуществления ATMU 30 интегрирован в сборку RF-катушек. В соответствии с проиллюстрированным ATMU 30 интегрирован в TEM-катушку 54, которая размещается в углублении 55 разделенной градиентной катушки 56. Разделенные градиентные катушки допускают больший размер туннеля за счет задания промежутка или углубления 55 между градиентными катушками, в которых размещается сборка RF-катушек. Данная компоновка вмещает в себя больший по размеру субъект и может снизить тревожность. Как показано на фигуре 6B, в иерархическом представлении TEM-катушки с интегрированным ATMU 30, ATMU может быть размещен на элементе 58 печатной платы (PCB) TEM-катушки. Линии передачи, соединяющие ATMU 30 с RF-передатчиком 24 и/или RF-приемником 26, могут быть проведены через корпус MR-системы 10 таким образом, чтобы не создавать помехи функционированию основного магнита или градиентной катушки.
Обратимся к фигуре 7; в третьем аспекте сборка 18, 18' RF-катушек представляет собой многочастотную многоэлементную сборку RF-катушек, а конкретнее, сборку чередующихся RF-катушек с двойной настройкой. Сборка 18, 18' RF-катушек включает в себя смежные катушечные элементы 60, 62, которые настраиваются на различные частоты для одновременного возбуждения множества видов ядер, например 13C и 1H. Однако также предполагаются другие виды, такие как 31P, 19F и т.п., вместе с конфигурациями без чередования или сборками с тройной, четверной и т.д. настройками.
Обратимся к фигуре 8; в четвертом аспекте сборка 18, 18' RF-катушек представляет собой многочастотную многоэлементную сборку RF-катушек, а конкретнее, сборку чередующихся RF-катушек с двойной настройкой, в которой один массив, например 13C 60, соединен через аппаратный объединитель 64 с RF-передатчиком 24. Данная конструкция удобна, когда одно из множества видов ядер не представляет зависимую от пациента нагрузку на отдельных катушечных элементах по причине более низкой частоты резонанса 13C. В примере, проиллюстрированном на фигуре 8, катушечные элементы 13C 60 не соединены с ATMU, поскольку при определенной напряженности поля, такой как 2 Тл, катушечные элементы 13C 60 не будут представлять значительно зависимое от пациента рассогласование импеданса, то есть зависимая от пациента нагрузка на отдельных катушечных элементах не является значительной при более низкой резонансной частоте 13C. Однако при той же самой напряженности поля катушечные элементы 1H 62 будут иметь нагрузку от субъекта и будут представлять рассогласование импеданса, которое может быть скомпенсировано соответствующими ATMU 30. Следует отметить, что также предполагаются другие виды, такие как 31P, 19F и т.п., вместе с конфигурациями без чередования или сборками с тройной, четверной и т.д. настройками.
Обратимся к фигуре 9; контроллер 20 сканирования управляет ATMU 30 для компенсирования рассогласований импеданса между получениями изображений в соответствии с проиллюстрированным на временной диаграмме. В одном из вариантов осуществления до получения любых представлений MR-визуализации контроллер 20 сканера управляет ATMU 30 для компенсирования рассогласований импеданса, в то время как субъект находится в оптимальном положении в области 14 исследования, с тем чтобы все неизвестные рассогласования импеданса могли быть приняты во внимание до получения изображений. В другом варианте осуществления контроллер 20 сканера управляет ATMU 30 для компенсирования рассогласований импеданса при исследованиях с подвижным ложем. При исследованиях с подвижным ложем представления изображений субъекта получаются при ряде различных положений в области 14 исследования. До исследования контроллер 20 сканера конфигурируется для управления ATMU 30 для компенсирования рассогласования импеданса во всех положениях ложа таким образом, чтобы все неизвестные рассогласования импеданса могли быть приняты во внимание до получения изображений. В качестве альтернативы рассогласование импеданса может быть измерено во время MR-сканирования, и ATMU подстраивается(ются) динамически во время сканирования для поддержания оптимального согласования импеданса.
Обратимся снова к фигуре 1; принятые данные от приемников 26 временно хранятся в буфере 70 данных и обрабатываются процессором 72 данных магнитного резонанса. Процессор данных магнитного резонанса может выполнять различные функции, известные из уровня техники, включая восстановление изображений (MRI), магнитно-резонансную спектроскопию (MRS), локализацию катетера или хирургического инструмента и т.п. Восстановленные магнитно-резонансные изображения, считанные данные спектроскопии, информация о локализации хирургического инструмента и другие обработанные MR-данные хранятся в памяти, такой как архив пациентов медицинского учреждения. Графический интерфейс пользователя или устройство 74 отображения включает в себя устройство пользовательского ввода, которое врач-клиницист может использовать для управления контроллером 20 сканирования для выбора последовательностей и протоколов сканирования, отображения MR-данных и т.п.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. Модификации и изменения могут быть выполнены специалистами после прочтения и понимания предшествующего подробного описания. Предполагается, что изобретение интерпретируется как включающее в себя все такие модификации и изменения до той степени, в которой они будут находиться в пределах объема прилагаемой формулы изобретения и ее эквивалентов.
Изобретение относится к согласованию импеданса высокой радиочастотной (RF) мощности. Устройство (30) и способ автоматической настройки и согласования содержит датчик (32) отраженной мощности, который детектирует мощность, отраженную от нагрузки (18, 18'), и LC-цепь согласования, включенную последовательно с нагрузкой, программируемую для минимизации отраженной мощности. LC-цепь согласования включает в себя матрицу (34) катушек индуктивности, включенную последовательно с нагрузкой (18, 18'), и матрицу (36) конденсаторов, включенную параллельно с матрицей катушек индуктивности. Контроллер (38) матриц конфигурирует по меньшей мере одну из матрицы катушек индуктивности и матрицы конденсаторов на основании детектированной отраженной мощности для минимизации отраженной мощности. Технический результат - повышение надежности функционирования устройства. 2 н. и 13 з.п. ф-лы, 9 ил.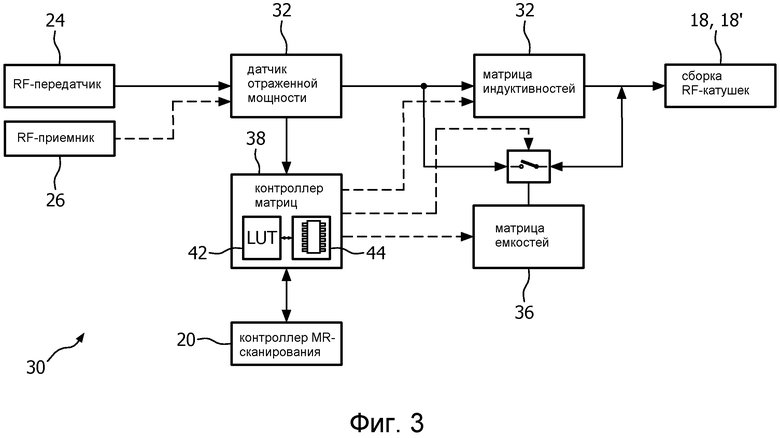
1. Магнитно-резонансная система (10), содержащая:
магнит (12), который генерирует статическое магнитное поле в области (14) исследования;
сборку (18, 18′) радиочастотных (RF) катушек, сконфигурированную для индуцирования и манипуляции магнитным резонансом в субъекте в области исследования и/или получения данных магнитного резонанса из области (14) исследования;
RF-передатчик (24), подключенный к сборке (18, 18′) RF-катушек, при этом RF-передатчик вызывает генерирование сборкой RF-катушек магнитного резонанса; и
устройство (30) автоматической настройки и согласования, при этом устройство автоматической настройки и согласования размещается между RF-передатчиком (24) и сборкой (18, 18′) RF-катушек для согласования импеданса сборки (18, 18′) RF-катушек и RF-передатчика (24), при этом устройство (30) автоматической настройки и согласования содержит:
датчик (32) отраженной мощности, который детектирует мощность, отраженную от нагрузки (18, 18′);
LC-цепь согласования, включенную последовательно с нагрузкой, при этом LC-цепь согласования программируется для минимизации отраженной мощности и включает в себя матрицу (34) катушек индуктивности и матрицу (36) конденсаторов; и
контроллер (38) матриц, который конфигурирует по меньшей мере одну из матрицы катушек индуктивности или матрицы конденсаторов на основании детектированной отраженной мощности,
при этом контроллер (38) матриц включает в себя:
справочную таблицу (42) множества известных рассогласований импеданса, при этом каждое известное рассогласование импеданса ассоциировано с соответствующими настройками матрицы катушек индуктивности и настройками матрицы конденсаторов; и
элемент (44) памяти, который хранит известные рассогласования импеданса и соответствующие настройки матриц катушек индуктивности и конденсаторов, и
при этом контроллер матриц конфигурирует по меньшей мере одну из матрицы катушек индуктивности или матрицы конденсаторов на основании настроек матриц катушек индуктивности и конденсаторов, сохраненных в памяти, которые соответствуют детектированной отраженной мощности.
2. Магнитно-резонансная система (10) по п. 1, в которой матрица (34) катушек индуктивности включена последовательно со сборкой (18, 18′) RF-катушек, а матрица (36) конденсаторов включена параллельно с матрицей катушек индуктивности.
3. Магнитно-резонансная система (10) по любому из пп. 1 и 2, в которой устройство (30) автоматической настройки и согласования дополнительно включает в себя:
переключатель (40) схемы, который переключает LC-цепь согласования на одну из обратной Г-образной схемы, прямой Г-образной схемы или П-образной схемы параллельной конфигурации.
4. Магнитно-резонансная система (10) по любому из пп. 1-2, дополнительно включающая в себя:
усилитель (24) передатчика, соединенный со сборкой (18, 18′) RF-катушек для подачи к ней питания; и
при этом контроллер матриц подстраивает матрицу (34) катушек индуктивности и матрицу (36) конденсаторов на импеданс нагрузки и усилителя передатчика.
5. Магнитно-резонансная система (10) по п. 2, в которой воплощено по меньшей мере одно из следующего:
матрица (34) катушек индуктивности включает в себя множество катушек индуктивности различных величин, при этом каждая катушка индуктивности подключена к соответствующему переключателю, который избирательно переключает катушку индуктивности в одно из активного или неактивного состояния; и
матрица (36) конденсаторов включает в себя множество конденсаторов различных величин, при этом каждый конденсатор подключен к соответствующему переключателю, который переключает катушку индуктивности в одно из активного или неактивного состояния.
6. Магнитно-резонансная система (10) по п. 1, в которой контроллер (38) матриц сконфигурирован для итерационного определения новых настроек матриц катушек индуктивности и конденсаторов и сохранения этих новых настроек матриц катушек индуктивности и конденсаторов в элементе (44) памяти.
7. Магнитно-резонансная система (10) по п. 4, дополнительно включающая в себя:
RF-приемник (26), подключенный к сборке (18, 18′) RF-катушек, при этом RF-приемник сконфигурирован для приема сгенерированных сигналов магнитного резонанса;
блок (28) переключения для избирательного подключения сборки (18, 18′) RF-катушек с одним из RF-передатчика (24) и RF-приемника (26), при этом устройство (30) автоматической настройки и согласования размещается одним из следующих способов:
(1) между сборкой RF-катушек и блоком (28) переключения для согласования импеданса сборки (18, 18′) RF-катушек и импеданса RF-приемника (26); и
(2) между RF-передатчиком (24) и блоком переключения.
8. Магнитно-резонансная система (10) по любому из пп. 1-2, дополнительно включающая в себя:
контроллер (20) сканирования, который управляет устройством (30) автоматической настройки и согласования для детектирования и минимизации отраженной мощности в сборке (18, 18′) RF-катушек.
9. Магнитно-резонансная система (10) по п. 8, в которой контроллер (20) сканирования управляет устройством (30) автоматической настройки и согласования для детектирования и минимизации отраженной мощности в сборке (18, 18′) RF-катушек между получениями изображений.
10. Магнитно-резонансная система (10) по любому из пп. 1-2, в которой устройство (30) автоматической настройки и согласования интегрировано в сборку (18, 18′) RF-катушек.
11. Магнитно-резонансная система (10) по п. 10, в которой устройство (30) автоматической настройки и согласования, интегрированное в сборку (18, 18′) RF-катушек, размещается в пределах углубления (55) катушки (56) градиентного магнитного поля.
12. Способ согласования импеданса, содержащий этапы, на которых:
размещают субъект в области (14) исследования MR-сканера смежно со сборкой (18, 18′) RF-катушек;
передают RF-импульс в сборку RF-катушек через передатчик, соединенный с LC-цепью согласования, содержащей матрицу (34) катушек индуктивности и матрицу (36) конденсаторов;
детектируют отраженную мощность RF-импульса от сборки (18, 18′) RF-катушек;
используют детектированную отраженную мощность для доступа к элементу (44) памяти, который хранит известные рассогласования импеданса и соответствующие настройки матриц катушек индуктивности и конденсаторов, с помощью справочной таблицы (42), ассоциирующей каждое из множества известных рассогласований импеданса с соответствующими настройками матрицы катушек индуктивности и настройками матрицы конденсаторов; и
программируют LC-цепь согласования для минимизации отраженной мощности с использованием настроек матрицы катушек индуктивности и настроек матрицы конденсаторов, извлеченных из памяти на основании детектированной отраженной мощности.
13. Способ по п. 12, в котором программирование цепи согласования дополнительно включает в себя по меньшей мере один из этапов, на которых:
переключают катушки индуктивности различной величины из матрицы (34) катушек индуктивности в одно из активного или неактивного состояния; и
переключают конденсаторы различной величины из матрицы (36) конденсаторов в одно из активного или неактивного состояния.
14. Способ по п. 12, дополнительно содержащий этап, на котором, когда детектированная отраженная мощность соответствует рассогласованию импеданса, которое не является одним из известных рассогласований импеданса, сохраненных в памяти, выполняют итерации по значениям емкости и значениям индуктивности, формируемым посредством различных настроек матрицы конденсаторов и матрицы катушек индуктивности, для идентификации настроек для матрицы конденсаторов и матрицы катушек индуктивности, которые компенсируют детектированное рассогласование импеданса.
15. Способ по п. 12, дополнительно содержащий этапы, на которых сохраняют в памяти настройки, для которых детектированное рассогласование импеданса скомпенсировано, и обновляют справочную таблицу для ассоциирования детектированного рассогласования импеданса с настройками для матрицы конденсаторов и матрицы катушек индуктивности, которые компенсируют детектированное рассогласование импеданса.
| US 5670881 A, 23.09.1997 | |||
| US 5300068 A, 05.04.1994 | |||
| US 2005099183 A1, 12.05.2005 | |||
| СИСТЕМА РАДИОЧАСТОТНЫХ КАТУШЕК ДЛЯ МАГНИТНО-РЕЗОНАНСНОГО ТОМОГРАФА | 2000 |
|
RU2189608C2 |

