ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается области применения магнитного резонанса, конкретнее ручного блока для приема сигналов, по меньшей мере, от одного электрического интервенционного приспособления, пригодного для использования в магнитно-резонансной системе.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Магнитно-резонансная (MR) система визуализации используется для обследования и лечения пациентов. С помощью такой системы спины ядер в исследуемой ткани организма выстраиваются параллельно посредством постоянного магнитного поля B0 и возбуждаются посредством поперечного магнитного поля B1, осциллирующего в диапазоне радиочастот для создания резонанса. Полученные в результате резонансные сигналы релаксации подвергаются воздействию градиентных магнитных полей для локализации получаемых резонансных сигналов релаксации. Резонансные сигналы релаксации принимаются и реконструируются для создания, например, одномерного или многомерного изображения.
Система радиочастотных (RF) катушек для всего тела обеспечивает передачу B1 RF-сигналов и прием резонансных сигналов. В дополнение к системе RF-катушек для всего тела, которая перманентно встроена в устройство для визуализации, используются также локальные или поверхностные катушки, которые могут гибким образом располагаться, например, в виде манжеты или накладки вокруг или внутри конкретной области, требующей обследования.
В некоторых областях применения интервенционные приспособления, например катетеры, вводятся в организм пациента в процессе визуализации. Катетеры часто имеют один или несколько элементов, построенных на RF-катушках, которые могут использоваться для определения местоположения катетера в организме пациента, принимая резонансные сигналы от примыкающей ткани и т.п. Линии передачи или каналы передачи соединяют устройства, подобные катетерам, иглам, катушкам для визуализации, проволочным направителям и т.п., с активным блоком, таким как блок подачи питания, устройство приема/передачи, блок управления и т.п. Активные блоки посылают RF-импульсы на катушки введенного устройства и/или принимают RF-сигналы от катушек введенного устройства. Обычно требуется электрическое соединение с активным блоком. Во избежание случайного поражения электрическим током пациента и/или хирурга обычно требуются дополнительные меры для обеспечения безопасности пациента и хирурга.
Когда интервенционные устройства проходят через MR-поля, эти поля, в особенности B1 RF-поля, могут наводить синфазные сигналы (токи) в линии передачи и в окружающей ткани организма. Эти токи не только представляют опасность в плане создания помех или вывода из строя интервенционного устройства и/или активного блока, но эти токи также могут вызвать существенный нагрев непосредственно примыкающих тканей, что может привести к возможным тяжелым ожогам у пациента. Вторым серьезным поводом для беспокойства является то, что неисправность активного блока или случайное накопление статического заряда и разряд по вине хирурга могут привести к прохождению тока через линию передачи в субъект.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
В настоящем описании предложен новый усовершенствованный ручной блок (держатель) для активных устройств, который обеспечивает устранение вышеуказанных и других недостатков.
Согласно одному аспекту ручной блок выполнен с возможностью приема любого из множества катетеров или других интервенционных инструментов. Ручной блок включает в себя изолирующую опору, поддерживающую участок интервенционного инструмента, который несет на себе линию передачи во внутреннем отверстии ручного блока, но сохраняя с ним зазор. Обмотка ручного блока расположена вдоль отверстия и взаимодействует с линией передачи для образования между ними индуктивной связи.
Согласно другому аспекту магнитно-резонансная система включает в себя магнит, генерирующий статическое магнитное поле в обследуемой области, радиочастотную передающую катушку, сконфигурированную с возможностью создания магнитного резонанса в обследуемой области, радиочастотную приемную катушку, сконфигурированную с возможностью приема данных магнитного резонанса из обследуемой области, а также ручной блок, о котором говорилось ранее.
Согласно следующему аспекту предложен способ управления катетером или другим интервенционным инструментом. Интервенционный инструмент соединяют с ручным блоком так, что линию передачи, проходящую через интервенционный инструмент, поддерживают во внутреннем отверстии ручного блока, сохраняя с ним зазор, и обеспечивают возможность аксиального скольжения относительно этого отверстия и поворота относительно этого отверстия. Интервенционный инструмент скользит по оси относительно отверстия для настройки индуктивной связи между индуктивной обмоткой интервенционного инструмента, соединенной с линией передачи, и индуктивной обмоткой ручного блока с целью регулирования силы взаимодействия. Интервенционный инструмент может быть заблокирован, чтобы препятствовать аксиальному перемещению скольжением относительно ручного блока, позволяя при этом интервенционному инструменту совершать вращение относительно ручного блока, таким образом, поддерживая состояние соединения и допуская свободное вращение устройства.
Одно из преимуществ заключается в снижении степени сложности и стоимости одноразовой части активного интервенционного устройства (катетера, иглы, проволочного направителя).
Другое преимущество заключается в возможности использования общего ручного блока для множества устройств. Общий ручной блок может использоваться многократно, что дополнительно снижает расходы.
Следующее преимущество заключается в управлении вручную силой взаимодействия, что позволяет увеличить уровень сигнала и отношение сигнал-шум.
Следующее преимущество заключается в более удобном «поворотном» манипулировании активным устройством по сравнению с устройствами, имеющими стандартные зафиксированные ручные блоки.
Следующее преимущество заключается в повышении безопасности пациента в силу индуктивной (т.е. бесконтактной) связи.
Дополнительные преимущества настоящего изобретения станут понятны средним специалистам в данной области техники после прочтения и осмысления последующего подробного описания.
Изобретение может быть выполнено с использованием различных компонентов и схем расположения компонентов, а также с использованием различных этапов и порядков следования этапов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает схематичный вид сбоку, частично в разрезе, MR-устройства совместно с индуктивным ручным блоком, индуктивно связанным с интервенционным устройством;
Фиг.2 изображает схематичный вид сбоку в разрезе индуктивного ручного блока, индуктивно связанного с интервенционным устройством;
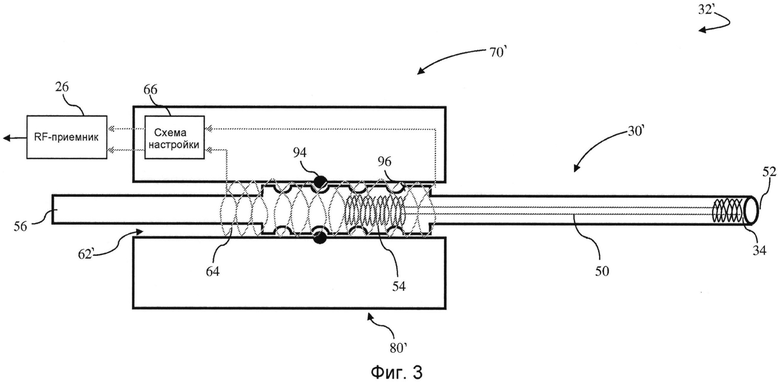
Фиг.3 изображает схематичный вид сбоку в разрезе индуктивного ручного блока, индуктивно связанного с интервенционным устройством, в котором применяется альтернативный блокировочный механизм;
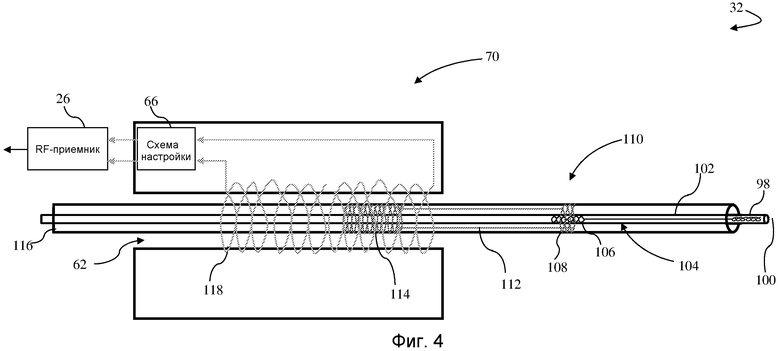
Фиг.4 изображает схематичный вид сбоку в разрезе индуктивного ручного блока, индуктивно связанного с катетером и далее с проволочным направителем посредством каскадной индуктивной связи.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на Фиг.1, магнитно-резонансная система 10 визуализации включает в себя главный магнит 12, генерирующий однородное во времени В0-поле в обследуемой области 14. Главный магнит может представлять собой кольцевой магнит или магнит туннельного типа, С-образный магнит открытого типа, иные конструкции магнитов открытого типа и т.п. Катушки 16 для создания градиентного магнитного поля расположены смежно с В0-магнитом для создания градиента магнитного поля в обследуемой области вдоль выбранных осей относительно В0-магнитного поля. Радиочастотная (RF) катушка, такая как радиочастотная катушка 18 для всего тела, расположена смежно с обследуемой областью. При необходимости в дополнение к RF-катушке для всего тела или вместо нее могут обеспечиваться локальные или поверхностные катушки 18′.
Контроллер 20 сканирования управляет контроллером 22 градиента, который заставляет градиентные катушки прикладывать импульсы градиентов магнитного поля к области визуализации в соответствие с выбранным режимом магнитно-резонансной визуализации или спектроскопии. Контроллер 20 сканирования также управляет RF-передатчиком 24, который заставляет RF-катушку для всего тела или локальные RF-катушки генерировать В1-импульсы для возбуждения магнитного резонанса и управления им. Контроллер 20 сканирования также управляет RF-приемником 26, который связан с RF-катушкой для всего тела или локальными RF-катушками, чтобы получать от них магнитно-резонансные сигналы.
Интервенционный инструмент, такой как катетер 30, соединен с возможностью съема с ручным блоком 32, который удерживается хирургом или врачом-клиницистом. Могут рассматриваться и другие различные типы интервенционных инструментов и катетеров. Например, катетер может включать в себя проволочный направитель, стент, инъектор, иглу, канал для введения контрастных веществ или других текучих сред и т.д. Катетер или другой интервенционный инструмент в представленном варианте осуществления имеет катушку 34, расположенную на его дистальном конце. При необходимости дополнительные катушки могут располагаться вдоль катетера. При необходимости другое электрическое оборудование, такое как усилитель, схемы согласования и настройки или другие схемы могут быть расположены в кончике катетера, примыкая к катушке 34. Катетер, в частности находящиеся в нем электрические проводники, посредством ручного блока 32 индуктивно связаны, но не соединены непосредственно электрическими проводами с RF-приемником 26 и/или RF-передатчиком 24′. RF-передатчик 24′ может быть таким же, как RF-передатчик 24. По альтернативному варианту, как показано на Фиг.1, RF-передатчики 24 и 24′ могут быть различными передатчиками, чтобы обеспечить существенно различные уровни передаваемой мощности.
Катушка 34 интервенционного инструмента может использоваться различным образом. В одном варианте осуществления RF-сигналы для возбуждения резонанса и управления им прикладываются посредством RF-передатчика 24′ к катушке 34 для создания резонанса в ткани, непосредственно примыкающей к катушке. В других вариантах осуществления резонанс создается в окружающей ткани с помощью RF-катушки 18 для всего тела или локальной RF-катушки 18′ с наружной части пациента. Катушка 34 также может быть использована в режиме приема для приема резонансных сигналов от резонирующей ткани, примыкающей к катушке. Такие резонансные сигналы посылаются на RF-приемник 26 для обработки аналогично другим принятым магнитно-резонансным сигналам. В еще одном режиме работы катушка 34 используется для определения местонахождения интервенционного инструмента, в частности дистального конца катетера. Известны различные технологии локализации. Наиболее часто выполняются последовательности MR-измерений, содержащие одно или несколько измерений проекций в одном или нескольких линейно независимых направлениях, при этом точечное распределение сигналов катушки 34 используется для воссоздания ее положения в одном или нескольких измерениях. В некоторых технологиях локализации катушка 34 переключается между резонансной конфигурацией и нерезонансной конфигурацией. В других технических решениях на катушку 34 подается RF-сигнал на частоте, отличной от ларморовой частоты. Этот RF-сигнал для определения местоположения может приниматься катушкой 18 для всего тела или локальной катушкой 18′. Градиенты магнитного поля могут прикладываться с целью пространственной локализации RF-сигнала для определения местоположения в отдельном процессе определения местоположения либо локализация катушки может выполняться одновременно с обработкой магнитно-резонансных сигналов. В интервенционном инструменте может также выполняться множество других электрических функций. Полученные приемником 26 данные временно хранятся в буфере 40 данных и обрабатываются процессором 42 для обработки магнитно-резонансных данных. Процессор для обработки магнитно-резонансных данных может выполнять различные функции, известные в данной области техники, в том числе реконструкцию изображений, магнитно-резонансную спектроскопию, определение местоположения катетера или иного интервенционного инструмента и т.п. Реконструированные магнитно-резонансные изображения, результаты спектроскопического исследования, информация о местоположении интервенционного инструмента и другие обработанные MR-данные отображаются на графическом интерфейсе 44 пользователя. Графический интерфейс 44 пользователя также включает в себя устройство для ввода данных пользователем, которое врач-клиницист может применять для управления контроллером 20 сканирования с целью выбора последовательностей и протоколов сканирования и т.п.
Как показано на Фиг.2, RF-катушка 34 соединена с линией 50 передачи, которая проходит вдоль катетера или другого интервенционного инструмента 30 от дистального конца 52 до индуктивной катушки 54 интервенционного инструмента, расположенной смежно с проксимальным концом 56. При необходимости линия передачи может включать в себя индуктивные соединения, например, с интервалами в четверть длины волны для блокирования передачи постоянных токов, токов нерезонансной частоты, а также синфазного резонанса. Кроме того, интервенционный инструмент может быть герметично уплотнен.
Дополнительно, интервенционный инструмент и одна из линий передачи могут быть герметично уплотнены, причем упомянутая одна из линий передачи является гибкой.
Ручной блок 32 включает в себя участок 60 корпуса, определяющий отверстие 62. Отверстие 62 больше в диаметре, чем, по меньшей мере, участок катетера или интервенционного инструмента, примыкающий к проксимальному концу 56, который включает в себя катушку 54. Таким образом, проксимальный конец катетера может быть введен в отверстие 62, но будет сохранять зазор с отверстием 62. Индуктивная катушка 64 ручного блока расположена вдоль отверстия, например кольцеобразно навита вокруг него по спирали или по синусоиде. Трансформаторная обмотка 54 интервенционного инструмента и индуктивная обмотка 64 ручного блока определяют трансформатор, настроенный на прохождение RF-сигналов соответствующей частоты, например сигналов на резонансной частоте, но выполненный с возможностью блокирования прохождения постоянного тока или других частот. При необходимости электрическую схему 66 устанавливают в ручном блоке, например, с герметичным уплотнением в корпусе ручного блока, чтобы упростить чистку и стерилизационную обработку. Схема 66 может включать в себя схему согласования, схему настройки, аналого-цифровые преобразователи, усилители и т.п.
Интервенционный инструмент удерживается в изолирующем опорном механизме 70. Изолирующий опорный механизм включает в себя втулку или дорожку 72 подшипника, внутренний размер которых подобран так, что интервенционный инструмент может скользить относительно втулки 72 и вращаться в ней. Путем осевого перемещения интервенционного инструмента относительное положение индуктивной обмотки 54 интервенционного инструмента и индуктивной обмотки 64 ручного блока избирательно регулируется, что регулирует взаимосвязь между этими двумя обмотками трансформатора. Путем регулирования такой связи можно регулировать силу взаимодействия, а значит амплитуду выходных сигналов с катушки 34, когда она функционирует в качестве антенны. Регулировка силы взаимодействия может сделать сигналы с катушки 34, примыкающей к дистальному концу интервенционного элемента, более ярко выраженными или менее ярко выраженными. Втулка 72, в свою очередь, поддерживается несущим элементом 74, таким как роликовые опоры, выполненные из ПТФЭ или резины, либо кольцо с малым коэффициентом трения. Несущий элемент 74, в свою очередь, поддерживается поддающимся сжатию кольцевым опорным элементом 76, таким как кольцо из мягкой резины.
Блокировочный механизм 80, который блокирует вращение интервенционного инструмента, включает в себя элемент 82, работающий на сжатие, который избирательно сжимает поддающееся сжатию кольцо 76 из мягкой резины изолирующего опорного механизма 70, поджимая несущие элементы 74 к втулке 72. Когда втулка 72 находится в сжатом состоянии, она захватывает интервенционный инструмент, препятствуя его аксиальному скольжению, при этом допуская вращение втулки 72 относительно несущего элемента 74, т.е. вращение интервенционного инструмента относительно ручного блока. Таким образом, интервенционный радиолог или иной пользователь может удерживать корпус 32 ручного блока в одной руке и осуществлять вращение или иные манипуляции в отношении интервенционного инструмента 30 другой рукой.
Блокировочный механизм 80 дополнительно включает в себя храповой механизм 84 для удержания поддающегося сжатию элемента 76 в выбранном состоянии сжатия. Конкретнее, собачки 86 на пружинных элементах 88 проходят наружу для зацепления кольцевых элементов храповика или зубьев 90 на элементе 82, работающем на сжатие. При поджатии элемент 82, работающий на сжатие, в направлении корпуса ручного блока защелкивает элементы 90 храповика поступательно собачками 86, все более плотно блокируя интервенционный инструмент. Для разблокирования блокировочного механизма требуется нажать на разблокирующие элементы 92, чтобы сместить пружинные элементы 88 и их собачки 86 от элементов 90 храповика, позволяя элементу 82, работающему на сжатие, перемещаться вдоль оси по мере расширения поддающегося сжатию элемента 76.
Как показано на Фиг.3, альтернативный блокировочный механизм 80′ включает в себя круговое запорное кольцо 94 в отверстии 62′ изолирующего опорного механизма 70′. Запорное кольцо выполнено с возможностью упругого зацепления ряда примыкающих кольцевых каналов 96 интервенционного инструмента. Следует понимать, что либо запорное кольцо 94, либо каналы 96, либо и те, и другие выполнены из упругого материала, который позволит запорному кольцу 94 пересечь приподнятые кромки между соседними каналами 96. Когда запорное кольцо находится в зацеплении с каналом, оно находится в одном из каналов, препятствуя аксиальному скольжению, но допуская при этом вращение относительно ручного блока. Таким образом, интервенционный радиолог, технический работник или другой пользователь может удерживать корпус 32′ ручного блока в одной руке и осуществлять вращение или иные манипуляции в отношении интервенционного инструмента 30′ другой рукой.
Согласно предпочтительному варианту, интервенционный инструмент вводится в субъект, расположенный в обследуемой области (14) магнитно-резонансной системы (10), причем в процессе введения интервенционного инструмента интервенционный инструмент вращают вручную относительно ручного блока.
Как показано на Фиг.4, альтернативная конфигурация включает в себя, по меньшей мере, два расположенных каскадом индуктивных соединения, включенных в состав интервенционного инструмента, содержащего катетер и конструкцию проволочного направителя либо иглу и конструкцию для направления иглы. RF-катушка 98, расположенная смежно с дистальным концом 100, соединена с первой линией 102 передачи, которая проходит вдоль интервенционного приспособления или устройства 104 до индуктивной обмотки 106 интервенционного приспособления. Первая обмотка 108 интервенционного инструмента расположена вдоль интервенционного инструмента 110. Первая обмотка 108 интервенционного инструмента и обмотка 106 интервенционного приспособления определяют трансформатор, настроенный на прохождение RF-сигналов на определенной частоте или полосе частот. Первая обмотка 108 интервенционного инструмента соединена со второй линией 112 передачи, которая проходит вдоль интервенционного инструмента 110 до второй индуктивной обмотки 114 интервенционного инструмента, расположенной возле проксимального конца 116 интервенционного инструмента 110. Индуктивная катушка 118 ручного блока расположена по кольцу вдоль отверстия 62. Индуктивная катушка 118 ручного блока и вторая индуктивная обмотка 114 интервенционного инструмента определяют трансформатор, настроенный на прохождение RF-сигналов на определенной частоте или полосе частот. Таким образом, ручной блок индуктивно связан с интервенционным приспособлением 104 посредством ряда индуктивных соединений с целью блокирования прохождения постоянного тока, а также других частот, позволяя при этом осуществлять визуализацию, спектроскопию, определение местонахождения и т.п. Изобретение описано со ссылкой на предпочтительные варианты осуществления. После рассмотрения и осмысления предшествующего подробного описания могут быть предложены модификации и альтернативные решения.
Подразумевается, что изобретение включает в себя все подобные модификации и альтернативные решения в той степени, в которой они входят в объем притязаний прилагаемой формулы изобретения или ее эквивалентов.

Предложены сборка ручного блока и интервенционного инструмента, магнитно-резонансная система и способ управления сборкой. Сборка содержит первую линию (102) передачи, соединенную с обмоткой (106) приспособления, проходящую вдоль интервенционного приспособления (104). Аксиальное положение обмотки (106) приспособления избирательно устанавливается путем аксиального скольжения приспособления относительно первой обмотки (108) интервенционного инструмента (110). Сборка содержит ручной блок, содержащий изолирующую опору (70), поддерживающую участок интервенционного приспособления, несущего в себе вторую линию (50, 112) передачи во внутреннем отверстии (62), сохраняя с ним зазор; и обмотку (64, 118) ручного блока, расположенную вдоль отверстия, причем обмотка ручного блока взаимодействует со второй линией передачи для образования индуктивной связи с линией передачи. Вторая линия (112) передачи, соединенная со второй обмоткой (114) интервенционного инструмента, проходит вдоль интервенционного инструмента (110), аксиальное положение второй обмотки (114) интервенционного инструмента избирательно устанавливается путем аксиального скольжения интервенционного инструмента относительно индуктивной катушки (118) ручного блока (32). Техническим результатом является повышение безопасности пациента при использовании сборки. 3 н. и 10 з.п. ф-лы, 4 ил.
1. Сборка ручного блока (32) и интервенционного инструмента (110), имеющая интервенционное приспособление, проходящее вдоль интервенционного инструмента, при этом интервенционный инструмент (110) содержит
первую линию (102) передачи, соединенную с обмоткой (106) приспособления, проходящую вдоль интервенционного приспособления (104), при этом аксиальное положение обмотки (106) приспособления избирательно устанавливается путем аксиального скольжения приспособления относительно первой обмотки (108) интервенционного инструмента (110);
ручной блок, содержащий:
изолирующую опору (70), поддерживающую участок интервенционного приспособления, несущего в себе вторую линию (50, 112) передачи во внутреннем отверстии (62), сохраняя с ним зазор; и
обмотку (64, 118) ручного блока, расположенную вдоль отверстия, причем обмотка ручного блока взаимодействует со второй линией передачи для образования индуктивной связи с линией передачи, при этом
вторая линия (112) передачи, соединенная со второй обмоткой (114) интервенционного инструмента, проходит вдоль интервенционного инструмента (110), аксиальное положение второй обмотки (114) интервенционного инструмента избирательно устанавливается путем аксиального скольжения интервенционного инструмента относительно индуктивной катушки (118) ручного блока (32).
2. Сборка по п.1, в которой линия (50, 102) передачи соединена с катушкой (34, 98), примыкающей к дистальному концу интервенционного инструмента, при этом рабочий блок предпочтительно дополнительно включает в себя схему (66) согласования, усиления и настройки.
3. Сборка по п.1 или 2, в которой линия передачи выполнена с возможностью вращения и аксиального перемещения относительно внутреннего отверстия и дополнительно включает в себя
блокировочный механизм (80, 80′), который избирательно препятствует аксиальному перемещению интервенционного инструмента относительно ручного блока.
4. Сборка по п.1 или 2, в которой интервенционный инструмент и одна из линий передачи герметично уплотнены; причем упомянутая одна из линий передачи является гибкой.
5. Сборка по п.1, в которой изолирующая опора (70′) включает в себя
запорное кольцо (94), сконфигурированное с возможностью упругого зацепления комплекта прилегающих кольцевых каналов (96) интервенционного инструмента (30).
6. Сборка по п.1, в которой изолирующая опора (70) включает в себя
втулку (72), в которую линия передачи помещена путем скольжения;
поддающийся сжатию элемент (76), который под действием элемента (82), работающего на сжатие, избирательно сжимает втулку (72), создавая более плотное фрикционное зацепление с участком интервенционного инструмента, помещенным в отверстие (62) ручного блока;
несущие элементы (74) между поддающимся сжатию элементом (76) и втулкой (72) для обеспечения возможности вращения втулочного элемента и интервенционного инструмента относительно ручного блока, когда поддающийся сжатию элемент (76) заставит втулку (72) войти в плотное зацепление с интервенционным инструментом.
7. Магнитно-резонансная система (10), содержащая
магнит (12), генерирующий статическое магнитное поле в обследуемой области (14);
радиочастотную передающую катушку (18, 18′), сконфигурированную с возможностью наведения магнитного резонанса объекта в обследуемой области;
радиочастотную приемную катушку (18, 18′), сконфигурированную с возможностью сбора магнитно-резонансных данных из обследуемой области; а также
сборку (32) по любому из пп.1-6, с помощью которой интервенционный инструмент (30) регулируемым образом располагается в обследуемой области (14).
8. Магнитно-резонансная система по п.7, в которой интервенционный инструмент включает в себя
катушку (34, 98) интервенционного инструмента, соединенную с линией передачи, при этом индуктивная обмотка (64, 118) ручного блока электрически соединена, по меньшей мере, с радиочастотным передатчиком (24, 24′) или радиочастотным приемником (26).
9. Магнитно-резонансная система по п.8, дополнительно включающая в себя
процессор (42) магнитно-резонансных (MR)-данных, обрабатывающий данные, поступившие с катушки (34, 98) интервенционного инструмента, для получения данных магнитно-резонансной визуализации, данных магнитно-резонансной спектроскопии или информации для определения местоположения катушки интервенционного инструмента.
10. Способ управления сборкой по п.1, содержащий этапы, на которых:
соединяют интервенционный инструмент (30, 110) с ручным блоком (32), так что линия (50, 112) передачи, проходящая через интервенционный инструмент, поддерживается в отверстии (62) ручного блока (32), сохраняя с ним зазор, и выполнена с возможностью аксиального скольжения относительно отверстия и вращения относительно отверстия;
обеспечивают скольжение интервенционного инструмента (30) аксиально относительно отверстия для регулирования индуктивной связи между индуктивной обмоткой (54) интервенционного инструмента, соединенной с линией передачи, и индуктивной обмоткой (64) ручного блока для регулирования силы взаимодействия;
блокируют интервенционный инструмент для препятствия аксиальному перемещению скольжением относительно ручного блока, при этом допуская вращение интервенционного инструмента относительно ручного блока.
11. Способ по п.10, дополнительно включающий в себя этапы, на которых:
вводят интервенционный инструмент в субъект, расположенный в обследуемой области (14) магнитно-резонансной системы (10);
в процессе введения интервенционного инструмента вращают вручную интервенционный инструмент относительно ручного блока.
12. Способ по любому из пп.10 или 11, в котором интервенционный инструмент включает в себя, по меньшей мере, одну радиочастотную (RF)-катушку (34, 98) интервенционного инструмента, соединенную с линией передачи, и индуктивную обмотку (64, 118) ручного блока, соединенную, по меньшей мере, с радиочастотным передатчиком (24, 24′) или радиочастотным приемником (26), при этом способ дополнительно включает в себя этапы, на которых:
по меньшей мере, либо передают радиочастотные сигналы с помощью RF-катушки (34, 98) интервенционного инструмента, либо принимают радиочастотные сигналы с помощью RF-катушки (34, 98) интервенционного инструмента.
13. Способ по п.12, дополнительно включающий в себя этапы, на которых:
обрабатывают сигналы, принятые с RF-катушки (34, 98) интервенционного инструмента, для генерирования, по меньшей мере, данных магнитно-резонансной визуализации, данных магнитно-резонансной спектроскопии или данных по определению местоположения катушки интервенционного инструмента.
| US 2008243218 A1, 02.10.2008 | |||
| US 2004199071 A1, 07.10.2004 | |||
| US 6628980 B2, 30.09.2003 | |||
| УСИЛЕНИЕ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА (ЯМР) И МАГНИТОРЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ (МРВ) В ПРИСУТСТВИИ ГИПЕРПОЛЯРИЗОВАННЫХ БЛАГОРОДНЫХ ГАЗОВ | 1997 |
|
RU2186405C2 |

