Изобретение относится к измерительной технике и может быть использовано в теплоэнергетике для контроля внутренней поверхности функционирующей дымовой трубы (без останова котлов).
Способ контроля внутренней поверхности дымовой трубы заключается в автоматизированном контроле электромагнитными излучениями внутренней поверхности функционирующей промышленной дымовой трубы с регистрацией и обработкой результатов измерений. Указанный способ реализуется в устройстве, перемещающемся внутри контролируемой трубы..
Задачей изобретения является повышение эффективности контроля за счет снижения расхода ресурсов на его проведение.
Известен способ контроля внутренней поверхности дымовой трубы [Способ контроля внутренней поверхности дымовой трубы и устройство для его осуществления / Патент РФ на изобретение №2152065, МПК G02B 23/24, A61B 1/04, G01B 11/24, опубликовано 27.06.2000, ООО «ЦИЭКС»], принятый за прототип, включающий в себя подсветку внутренней поверхности, лазерным излучением в форме кольца, визирование подсвеченного участка на поверхности, суждение о состоянии поверхности по полученному изображению. В известном способе изображение подсвеченного участка трансформируют в поперечную плоскость трубы. Степень и форма искажения (величина искривления кольцевого изображения в поперечной плоскости Δy) полученного кольцевого изображения в поперечной плоскости связаны с глубиной трещины Δz на обследуемой поверхности трубы математическим выражением: Δz=Δy/(tgα-tgβ), где α - угол между направлением лазерного излучения и нормалью к контролируемой поверхности трубы; β - угол между направлением визирования на контролируемую поверхность трубы и нормалью к этой поверхности.
Недостатком прототипа является неэффективное расходование ресурсов на подсветку внутренней поверхности трубы, поскольку в указанном способе перемещающаяся кольцевая подсветка не осуществляется периодически и в способе не используется белый свет экономичных матричных светодиодных (безынерционных) излучателей. В способе не используется импульсно-периодический режим контроля с периодом времени, в течение которого устройство перемещается на расстояние, не превышающее высоту полосы контроля на внутренней поверхности дымовой трубы. Следовательно, в прототипе ресурсы на проведение контроля тратятся неэффективно.
Неэффективное расходование ресурсов на контроль в известном способе (прототипе) может быть устранено применением, во-первых, подсвечивания кольцевых участков (полос) съемки внутренней поверхности трубы в течение времени визирования (выдержки фотокамеры) белым светом излучения светодиодов с непрерывно движущегося вниз устройства, во-вторых, осуществлением подсветки и визирования одновременным включением в работу излучателей и фотокамер с периодом времени не более времени перемещения устройства на высоту полосы съемки внутренней поверхности трубы.
Другим недостатком способа [Патент на изобретение РФ №2152065] является периодическое отклонение направления и места фотографирования за пределы полосы съемки из-за колебаний (эволюции) автономного аппарата при его спуске на тросе в дымовую трубу в восходящем и закрученном потоке горячих дымовых газов. Указанный недостаток (так называемый «нахлест» предыдущего и последующего участков контроля) обусловлен отклонением реальной полосы съемки от ее расчетного положения из-за эволюции и колебаний устройства (автономного аппарата). Недостаток способа связан с тем, что в прототипе не используются излучения гиростабилизированных относительно горизонтальной плоскости излучателя и приемника. Недостаток приводит к неэффективному расходованию ресурсов на съемку избыточных площадей поверхности трубы.
Неэффективное расходование ресурсов на съемку избыточных площадей может быть устранено применением:
во-первых, визирования внутренней поверхности дымовой трубы с использованием источника излучений и их приемника, установленных на гиростабилизированой горизонтальной платформе в устройстве;
во-вторых, позиционирования места съемки внутри дымовой трубы (измерением высоты подъема устройства и угла его поворота вокруг вертикальной оси относительно репера, спущенного по внутренней северной стороне внутри трубы) с помощью импульсно-фазного 3D-лазерного сканирования.
Таким образом, недостатки способа (прототипа) могут быть устранены введением в него следующих новых процессов съемки - более экономичных спектров электромагнитных излучений (белого света), создаваемых матричными светодиодными излучателями вместо излучателей на базе галогенных ламп. Кроме того, эффективность способа может быть повышена устранением зависимости направлений лучей излучателя и приемника от крена автономного аппарата, совершающего колебания и эволюции. Это достигается тем, что используются сигналы излучателя и приемника излучений с гиростабилизированной в горизонтальной плоскости платформы.
Известно устройство для контроля внутренней поверхности дымовой трубы [Патент на изобретение РФ №2152065, опубликовано: 27.06.2000, ООО «ЦИЭКС»], принятое за аналог, и содержащее источник подсветки, оптическую систему для визирования изображения внутренней поверхности дымовой трубы.
Известен корпус модуля для размещения исследовательской аппаратуры [Патент на изобретение №2256241, G12B 9/10, Опубликовано 10.07.2005, Бюл. №19, ООО «ЦИЭКС»], принятый за аналог устройства, выполненный в виде кожуха с полусферической головной частью и цилиндрической боковой, на которой укреплены диски, а в хвостовой части размещены элементы крепления троса для соединения с краном.
В качестве прототипа принят автономный аппарат для контроля внутренней поверхности дымовой трубы [Акатьев В.А., Сущев С.П. Технология и параметры автономного аппарата для контроля футеровки функционирующей дымовой трубы // Безопасность жизнедеятельности. - 2005. - №3. - С.32-44]. Прототип содержит корпус для размещения приборов, имеющий головной полусферический обтекатель, цилиндрический кожух и хвостовой отсек с элементами крепления маятникового типа. По периметру в цилиндрическом кожухе установлены излучатели (галогенные лампы и лазеры) и приемники сигналов (фотокамеры и приемник лазерного сигнала) системы оптической визуализации внутренней поверхности, кроме того, на цилиндрическом кожухе закреплены два диска системы аэродинамической стабилизации.
Указанное устройство имеет недостаточную эффективность. Это связано с тем, что в системе подсветки не используются безынерционные матричные светодиодные излучатели белого света. В прототипе для достижения свечения тратится энергия для разогрева галогенной лампы до рабочей температуры.
Устройство (прототип) имеет недостатки, связанные с возможностью перегрева среды или появления протечки вещества в приборном отсеке. Это обусловлено тем, что в системе термостабилизации не используются переносные патроны с легкоплавким веществом с температурой плавления не превышающей предельно допустимую температуру по условиям эксплуатации размещенных в устройстве приборов и имеющие внутри эластичные газовые камеры, предотвращающие патрон от разрушения при затвердевании вещества и последующего пролива вещества в приборном отсеке.
В известном устройстве (прототипе) при работе устройство совершает маятниковые колебания, при которых объектив камеры меняет угол в пространстве - то наклоняется, то поднимается, в результате чего камера получает наклон относительно расчетного горизонтального направления съемки. Этот недостаток приводит к необходимости проводить фотографирование заведомо большей площади съемки. При каждой новой полосе съемки закладывается запас по высоте полосы фотографирования, что приводит к неэффективному расходованию ресурсов (времени съемки, энергии на съемку). Указанная неэффективность связана с тем, что устройство не содержит капсулу для размещения излучателей и приемников систем оптической визуализации, подвешенную на шаровом шарнире внутри корпуса (т.е. излучатели и приемники не гиростабилизированы в горизонтальной плоскости).
Недостатки известного устройства (прототипа) так же могут быть устранены за счет оснащения системы оптической визуализации сканирующим лазером, а системы подсветки матрицами светодиодов, кроме того, в систему термической стабилизации - патронами с легкоплавким веществом с температурой плавления не превышающей предельно допустимую температуру внутри приборных отсеков.
Повышение эффективности контроля достигается размещением излучателей и приемников систем оптической визуализации в капсуле, гиростабилизированной и подвешенной на шаровом шарнире внутри корпуса.
Для исключения повреждений от возможных соударений нижней части капсулы с корпусом устройства внутренняя поверхность корпуса и наружная боковая поверхность капсулы в местах возможных соприкосновений оснащены амортизирующими вставками.
Устройство для осуществления способа имеет импульсно-фазовый сканирующий 3D-лазер с блоком координатной ориентации в пространстве, регистрации и обработки изображения, источник подсветки, приемник излучения с блоком обработки информации, системы аэродинамической и термической стабилизации. При этом источник подсветки (излучатель), фотокамеры (приемники) и сканирующий 3D-лазер размещены на гиростабилизированной в горизонтальной плоскости платформе.
В качестве источника подсветки используются светодиоды, излучающие белый свет. Для охлаждения светодиодов используются легкоплавкие вещества, которые одновременно служат балластом в системе аэродинамической стабилизации.
Для повышения качества изображения приемник изображения размещен на гироскопическом подвесе (капсуле), который с высокой точностью стабилизирует положение приемника в горизонтальной плоскости. Вертикальное позиционирование устройства в дымовой трубе осуществляется с помощью счетчика длины троса и лазерного дальномера. Спускаемая в дымовую трубу длина троса определяется на основе анализа измеренных данных о скорости спуска устройства в дымовую трубу (угловой скорости барабана и диаметра вместе с тросом, намотанном на барабан лебедки) и времени спуска.
С помощью данного изобретения расширяются функциональные возможности, повышается точность контроля, повышается надежность и уменьшается энергопотребление устройства, осуществляющего способ контроля внутренней поверхности трубы.
Варианты устройства для реализации заявленного способа представлены на фиг.1, фиг.2 и фиг.3, фиг.4, фиг.5, фиг.6 и фиг.7.
На фиг.1 показано устройство, содержащее подвешенную на тросе внутри его корпуса на точечном шарнире 5, находящегося на вертикальной оси устройства, гиростабилизированную капсулу с размещенными в ней источниками 8, 9 и приемниками 11, 18 излучений. Само устройство закреплено на тросовой подвеске, состоящей из нераскручивающегося троса 1 двойной навивки, траверсы 2 со стропами 3, свободно проходящими через вертикальные отверстия в диске 6 и закрепленными за выступы 7 на двух внешних противоположных сторонах цилиндрической части устройства, находящихся ниже диска 6. Корпус устройства состоит из головного полусферического обтекателя 15, цилиндрического кожуха 20 с дисками 6 и 14 аэродинамической стабилизации. Цилиндрический кожух в хвостовой части закрыт колпаком 4 полусферической формы. Внутри колпака 4 размещен приборный отсек и бортовой компьютер 25. В местах крепления дисков 6 и 14 имеются фланцевые разъемы корпуса, позволяющие производить разборку устройства на составные части и открывающие доступ к внутренним системам.
К корпусу в точке 5, находящейся на оси подвески устройства, подвешена с возможностью поворота вокруг точки 5 капсула, имеющая цилиндрический кожух 22. Возможность свободного поворота капсулы вокруг точки 5 обеспечивается либо с помощью шарового шарнира, либо не менее чем двумя звеньями цепи, либо гибким канатом. Цилиндрический кожух капсулы 22 размещен коаксиально с цилиндром кожуха 20. Для предохранения от повреждений при возможных соударениях наружной поверхности капсулы 22 с внутренней поверхностью цилиндрического кожуха 20 на внутренней поверхности цилиндрического кожуха 20 и на наружной поверхности капсулы 22 в местах возможного соударения (при эволюциях устройства во время спуска в трубе) установлены амортизирующие вставки 12.
В головном полусферическом обтекателе 15 устроен приборный отсек 16 для наиболее тяжелого оборудования, например аккумуляторов. Внутри полусферического обтекателя строго по вертикальной оси симметрии устройства установлен с возможностью поворота в горизонтальной плоскости вокруг вертикальной оси симметрии на 360° импульсно-фазовый лазерный трехмерный сканер 17. Указанный сканер имеет объектив, вращающийся в вертикальной плоскости на 270° (для обзорной съемки). Лазерный сканер 17 обеспечивает позиционирование устройства по высоте и углу поворота по часовой стрелке в горизонтальной плоскости относительно северного направления, обозначенного репером-тросом 26, спускающимся внутри дымовой трубы по северной внутренней ее стороне от оголовка до основания.
Лазерные излучатели 8 и матричные светодиоды 9 размещены в верхней части капсулы 22, а фотокамеры и приемник лазерного сигнала - в нижней части капсулы. В капсуле 22 в верхней части закреплена вертикальная ось, на которой на подшипниках установлены роторы 10, вращающиеся во взаимно противоположных направлениях.
Внутри устройства, в его ограждающих конструкциях, на резьбовом соединении установлены охлаждающие патроны 23, заполненные затвердевшим легкокипящим веществом (хладагентом). В качестве основного хладагента применяется лед (вода). Однако, в зависимости от температурного режима в капсуле, в качестве хладагента могут использоваться углекислый газ, азотнокислый никель, воск и парафин, которые имеют температуры плавления, несколько отличные от нуля градусов по Цельсию. Запас холода в хладагенте обеспечивает отвод избытков теплоты от работающих в устройстве приборов (излучателей, компьютеров, аккумуляторов и т.п.).
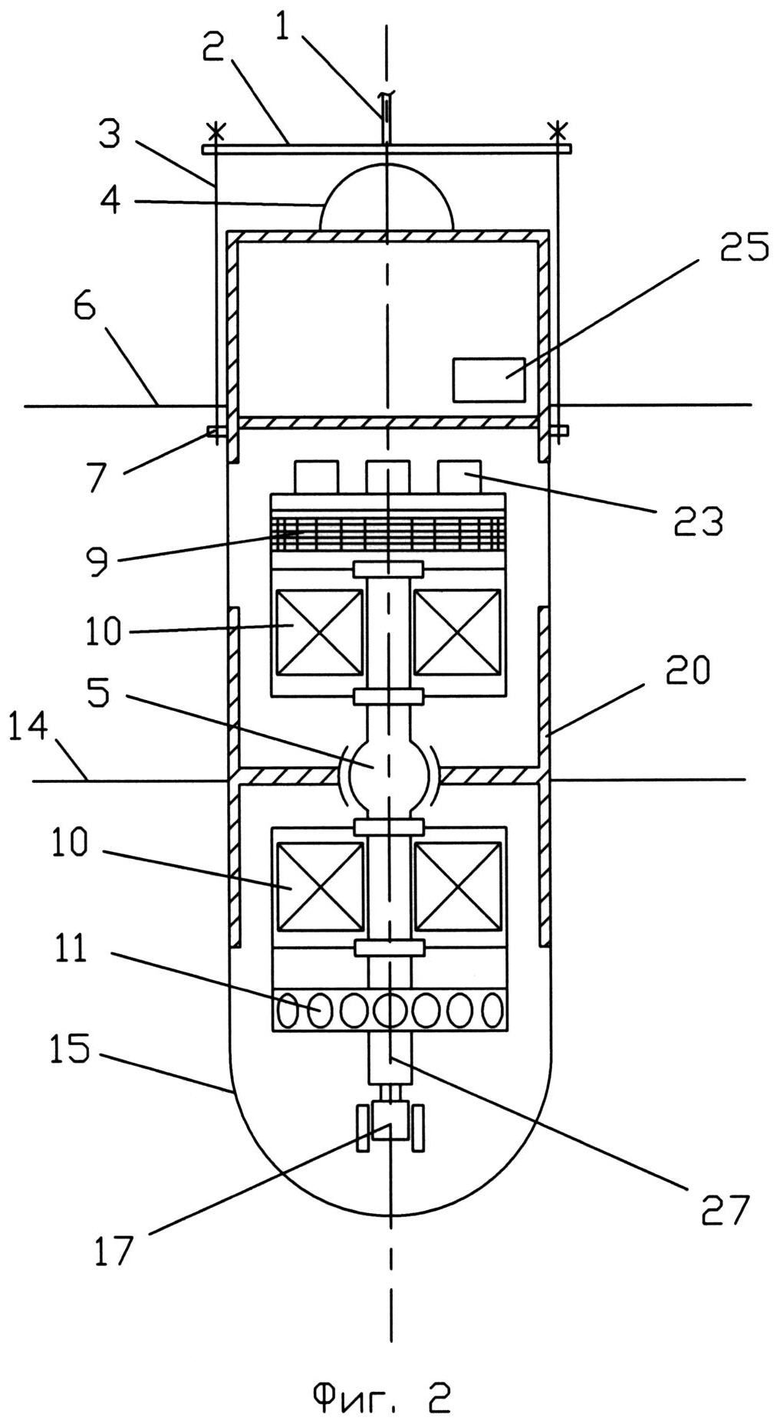
На фиг.2 изображено устройство, содержащее гиростабилизированную платформу на шаровом шарнире 5, размещенном в горизонтальной перегородке цилиндрического кожуха 20, проходящей ниже центра масс устройства. Шарнир 5 находится выше центра масс гиростабилизированной платформы (капсулы).
Устройство закреплено на тросовой подвеске, состоящей из нераскручивающегося троса 1 двойной навивки, траверсы 2 со стропами 3, свободно проходящими через вертикальные отверстия в диске 6 и закрепленными за выступы 7 на двух внешних противоположных сторонах цилиндрической части устройства. Корпус устройства состоит из головного полусферического обтекателя 15, цилиндрического кожуха 20 с дисками 6 и 14 аэродинамической стабилизации. Цилиндрический кожух в хвостовой части закрыт колпаком 4 полусферической формы.
В верхней части цилиндрического кожуха 20 в приборном отсеке размещен бортовой компьютер 25. В центральной части кожуха 20 ниже центра масс имеется горизонтальная перегородка, в которой установлен шаровой шарнир 5 для вертикальной цилиндрической оси 27. На оси 27 закреплены неподвижно верхняя и нижняя цилиндрические капсулы. В верхней капсуле установлены матричные светодиодные излучатели 9 и охлаждающие патроны 23 со льдом. В нижней капсуле по ее периметру с возможностью съемки внутренней стенки трубы установлены фотокамеры 11. В капсулах имеются вращающиеся в противоположных направлениях роторы 10, обеспечивающие неизменность вертикального положения цилиндрической оси 27.
На нижнем торце вертикальной цилиндрической оси 27 закреплен, с возможностью поворота вокруг вертикальной оси на 360°, трехмерный (3D-сканер) импульсно-фазовый лазерный сканер 17, имеющий возможность поворота объектива в вертикальной плоскости на 270° (для обзорной съемки).
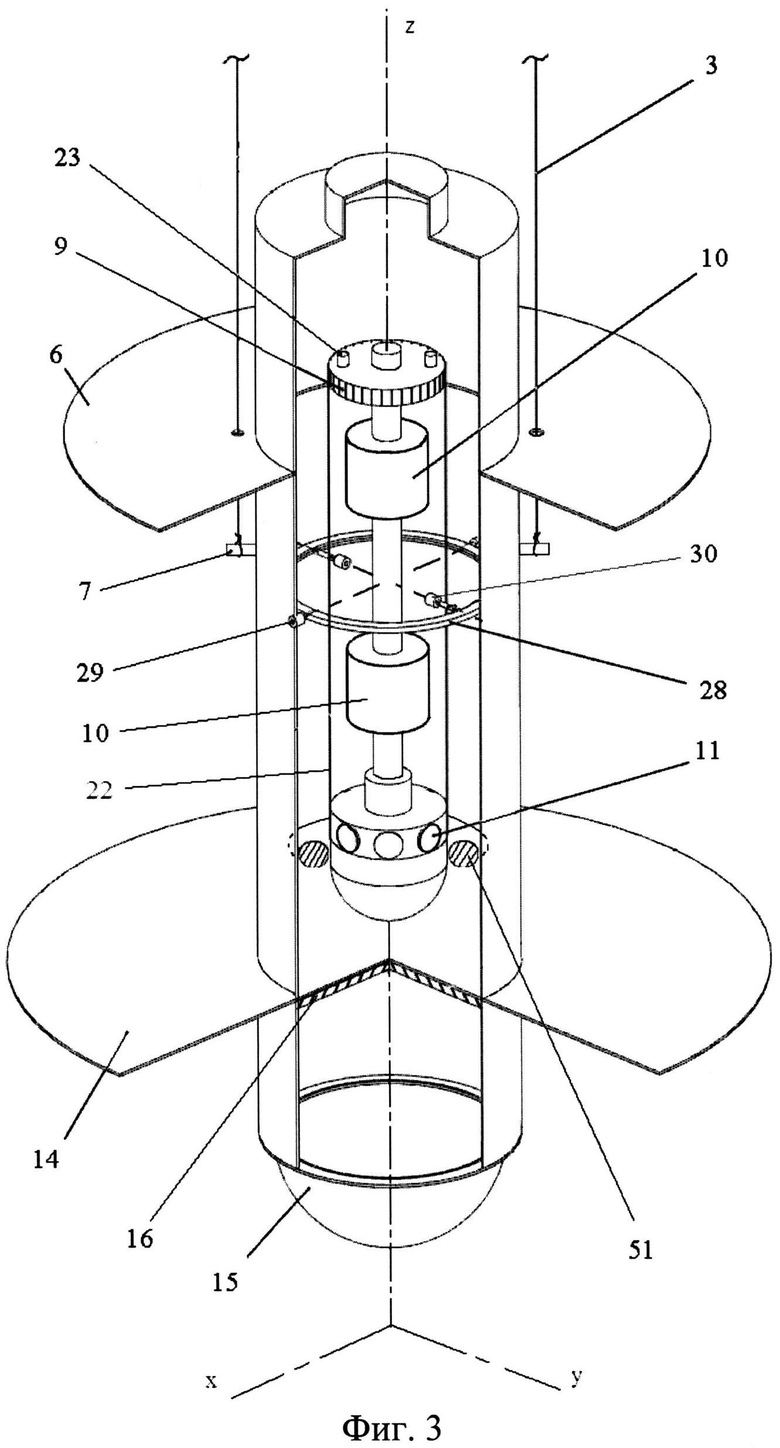
На фиг.3 показано устройство, имеющее кольцевой карданный подвес 28, 29, 30 для крепления гиростабилизированной капсулы. Капсула имеет цилиндрический кожух 22. В верхней перегородке кожуха 22 установлены матричные светодиодные излучатели 9 и охлаждающие патроны 23 со льдом. Приборный отсек 16, расположенный в нижней части кожуха, предусмотрен для размещения аккумуляторов, бортового компьютера и другого массивного оборудования.
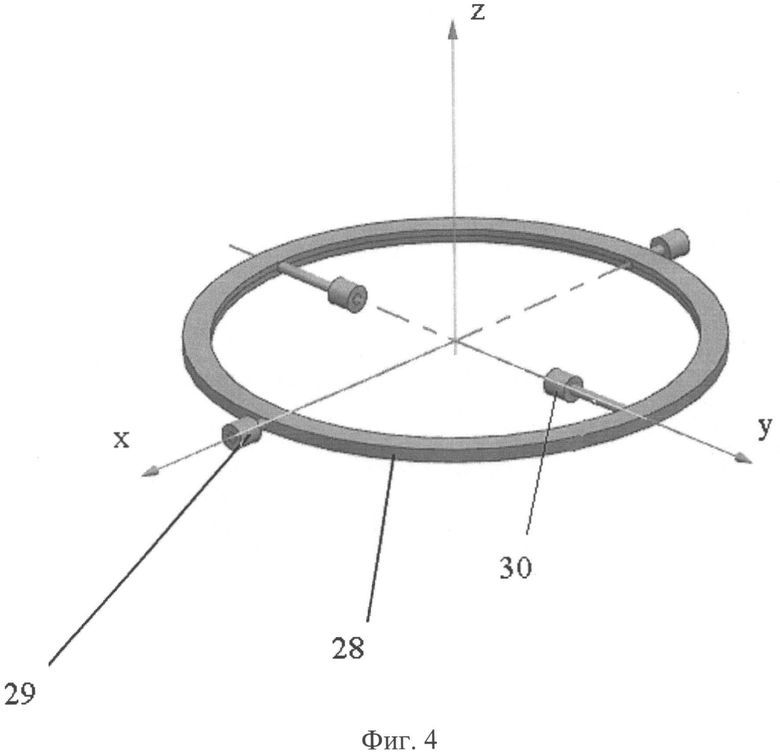
На фиг.4 изображена конструкция карданного подвеса, выполненная в форме охватывающей капсулу кольца 28 с внутренней парой осей 30 и внешней парой осей 29.
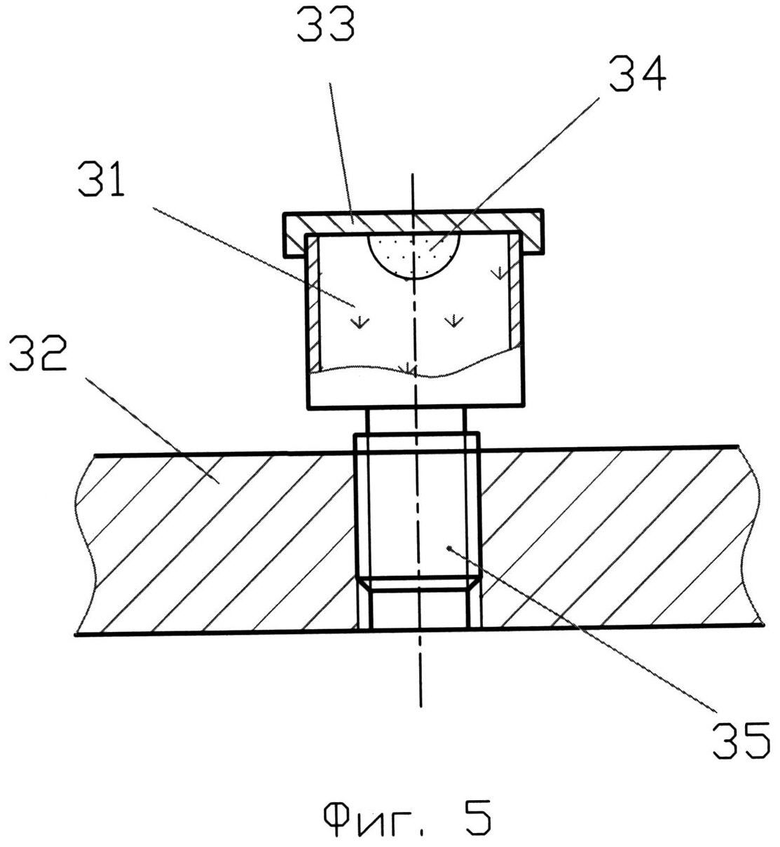
На фиг.5 показан патрон с хладагентом системы утилизации избытков теплоты. В перегородке 32 на резьбовом соединении 35 закреплен патрон, имеющий внутреннюю полость 31 для легкоплавкого вещества и крышку 33 с встроенной внутри эластичной камерой 34, заполненной воздухом.
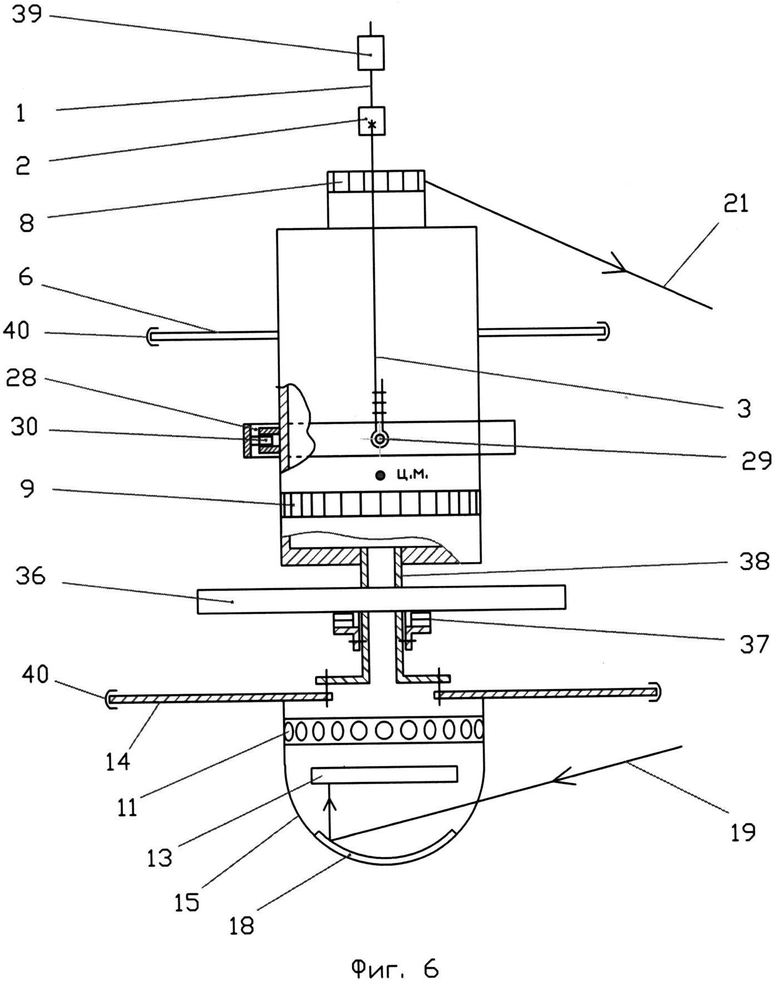
На фиг.6 представлено устройство, целиком гиростабилизированное в горизонтальной плоскости. Оно содержит маховик 36, установленный на вертикальной оси 38 - полом цилиндре, неподвижно соединяющим нижний и верхний блоки корпуса. Кроме того, оно имеет охватывающий цилиндрическую часть корпуса кольцевой карданный подвес в составе кольца 28 и двух пар осей - внутреннюю 30 и внешнюю 29. Маховик 36 опирается на осевой подшипник 37 и размещен между аэродинамическими дисками 6 и 14, но ближе к нижнему диску 14 и уступает ему в диаметре. Тросовая подвеска 1 оснащена гидравлическим демпфером 39 для снижения тряски («пляски») троса (когда устройство опускается в верхней части трубы - при малой длине маятникового подвеса). Устройство имеет лазерный рубиновый излучатель 8, а также приемник отраженного сигнала с зеркальным полусферическим отражателем 18. Головной полусферический обтекатель 15 выполнен из плавленого кварца, внутренняя часть которого 18 позолочена (покрыта сусальным золотом). Внутри обтекателя размещены приборы с зарядовой связью 13. Устройство оснащено также излучателем видимого диапазона 9 и блоком фотокамер 11. На фиг.6 также показаны прямой 21 и отраженный 19 лазерные лучи.
Перед опусканием устройства в дымовую трубу маховик приводится во вращение - разгоняется до скорости примерно 3000…4000 об/мин С этой целью на светофорной площадке дымовой трубы производится разборка устройства по нижнему фланцевому разъему, при этом удаляется вместе с аэродинамическим диском 14 головной обтекатель 15 и устройство устанавливается на монтажный столик, который показан на фиг.7.
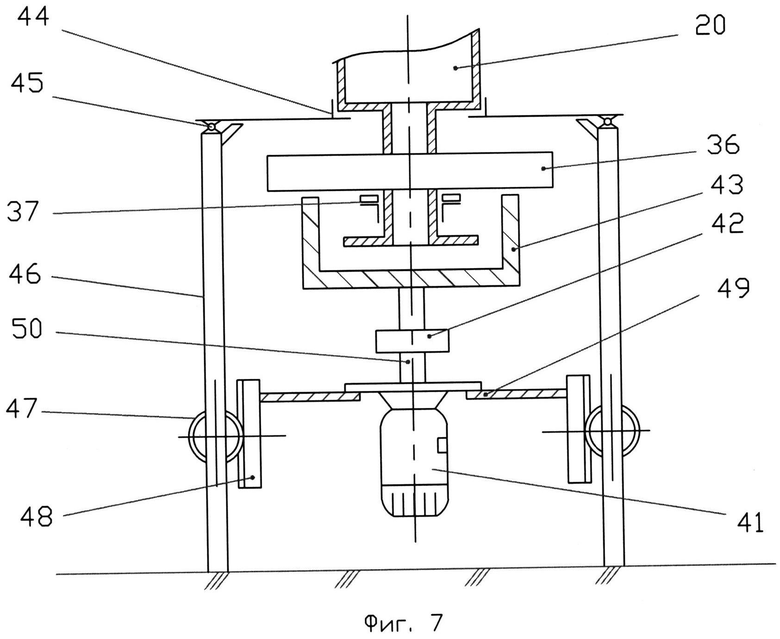
На фиг.7 представлен эскизный чертеж монтажного столика, предназначенного для проверки работоспособности технических систем устройства перед опусканием его в дымовую трубу. Монтажный столик используется и для раскрутки маховика до необходимой скорости вращения (3000…5000 об/мин). Для установки устройства в вертикальное положение и закрепления его в таком положении столик имеет откидывающиеся опорные гнезда 44 и шарниры 45 для соединения откидывающихся гнезд со стойками 46. К стойкам 46 закреплены шестерни 47 (с возможностью вращения вокруг горизонтальной оси), входящие в зацепление с зубчатой рейкой 48, обеспечивающей подъем стола 49 сервомотора. Сервомотор 41 имеет фланцевое соединение, с помощью которого он закреплен на столе 49. Вал 50 серводвигателя 41 с помощью обгонной муфты 42 соединен с фрикционным стаканом 43. Монтажный столик устанавливается, преимущественно, на верхней (светофорной) площадке дымовой трубы.
Благодаря шестерне 47 и рейке 48 высотная отметка сервомотора 41 может регулироваться, что позволяет соединить вал сервомотора 50 через муфту 42 с валом фрикционного стакана 43, который входит во фрикционное зацепление с маховиком 36. После запуска серводвигателя 41 маховик 36 плавно разгоняется.
Устройство работает следующим образом.
Устройство (фиг.1), подвешенное на нераскручивающемся при нагрузках тросе (двойной навивки) 1, опускается в функционирующую дымовую трубу 24, при этом фотокамеры 11 движущегося внутри дымовой трубы устройства работают автоматически в циклическом режиме. Они с периодом цикла визирования (при скорости спуска 0,15 м/с примерно 11 секунд), зависящим от скорости перемещения устройства и высоты кольцевой полосы визирования (период цикла не превышает частное от деления шага визирования на скорость, т.е. при ΔH=1,8 м частное равно 12 с), включаются для фотографирования. Устройство показано при включенных матричных светодиодных излучателях 9 белого света и включенных фотокамерах 11.
Светодиоды, не имея инерционности, позволяют синхронизировать работу фотокамер с работой матричных светодиодных излучателей 9. Скорость движения устройства в трубе (в условиях восходящего закрученного на 10…15% потока газов) по условиям аэродинамической стабилизации устройства ограничивается значениями скорости 0,15…0,20 м/с. При указанных выше параметрах период цикла включения фотокамер равен 11 с, а высота контролируемого слоя (кольцевые полосы) составляет 1,5 м. Угол обзора 2Ω объектива камеры показан на фиг.1. Он определяется в зависимости от радиуса R трубы и высоты h полосы съемки выражением (tgΩ=h/R). Каждая кольцевая полоса фотографируется несколькими фотокамерами 11 (10…30 шт. - для труб диаметром от 8 до 36 м), установленными в устройстве с внешней стороны и равномерно рассредоточенными по окружности. При контроле внутренней поверхности (футеровки) дымовой трубы высотой 150 м требуется не менее 100 фотографирований. В этом случае время контроля внутренней поверхности при спуске аппарата в трубу составляет 1100 с. Учитывая, что допустимая (по условиям аэродинамики) скорость подъема устройства в два раза выше скорости спуска, общее время спуска-подъема при контроле дымовой трубы высотой 150 м составляет около получаса.
Информация о фотоизображении, полученная в конкретный момент времени от фотокамер, записывается на жесткий диск бортового компьютера, при этом она позиционируется с информацией, полученной в то же самое время от трехмерного (3D-сканер) импульсно-фазового лазерного сканера 17, о высотной отметке устройства, азимутальном угле поворота устройства и скорости его вращения. Изображения, полученные от фотокамер, подвергаются обработке с помощью компьютерных программ, поскольку необходимо скомпенсировать искажения масштаба, получаемые при фотографировании кольцевой камерой участка поверхности, имеющей кривизну (в продольном направлении внутренняя поверхность трубы не имеет кривизны). Кроме того, фотокамера может давать искажения масштаба изображений в центральной и периферийной зонах фотосъемки. Искажения масштаба, допущенные в каждом изображении (фотографии) участка цилиндрической поверхности, устраняются компьютерными программами. С помощью компьютерной программы фотография преобразуется в развертку - с превращением цилиндрической поверхности трубы в развернутую плоскую поверхность. Одновременно, устраняются искажения изображений деталей, находящихся в центре (ближняя зона съемки) и периферии (периферийная зона съемки) фотографии.
После восстановления фотографий, полученных фотокамерами при одномоментной съемке, другая компьютерная программа «сшивает» отдельные восстановленные фотографии в единую фотографию, так называемую развертку полосы съемки внутренней поверхности дымовой трубы. Следующая программа распознает по полученной информации (фотографии развертки) дефекты - трещины в футеровке, вывалы кирпича и пр.
Лазерный излучатель (фиг.1) состоит из нескольких рубиновых лазеров. Они вместе создают кольцевой (пространственный) тонкий слой излучения 21, который после отражения от поверхности стенки в виде сплошного кольцевого слоя излучения 19 поступает в отражатель 18. В отражателе 18 сигнал, отражаясь, преобразуется в продольный кольцевой сигнал, принимаемый приборами 13 с зарядовой связью. Преобразованное отраженное излучение в виде цифрового сигнала поступает в компьютер 25 для дальнейших операций с ним.
При работе компьютера 25, излучателей 8, 9, электрических аккумуляторов выделяются избытки теплоты. Теплота также передается внутрь устройства, в его приборные отсеки, от горячих (150…300°C) газов через ограждающие стенки корпуса. Утилизация избытков теплоты происходит за счет нагрева охлаждающих патронов 23. Перед спуском устройства в трубу на светофорной (монтажной) площадке в перегородки внутренних отсеков устанавливаются с помощью резьбовых соединений охлаждающие патроны 23 с замороженной водой внутри.
Для снижения поступающей извне теплоты внутрь корпуса внешняя его поверхность обмазывается теплоизоляцией и окрашивается в серебристый цвет.
Работа другого варианта устройства (фиг.2) с шаровым подвесом 5, делящим внутреннюю гиростабилизированную капсулу на два блока, заключается в следующем. В верхнем и нижнем блоках капсулы вращаются во взаимно противоположных направлениях роторы 10, стабилизирующие положение вертикальной оси капсулы. При эволюциях и колебаниях корпуса устройства капсула занимает вертикальное положение благодаря ее повороту в шаровом шарнире 5. В капсуле имеются излучатель и приемник излучений видимого диапазона. На нижнем торце капсулы установлен импульсно-фазовый трехмерный лазерный сканер 17, который имеет возможность азимутального обзора (при его повороте) на 360°. Обзор по вертикали составляет 270°. Указанный сканер при работе может создавать облако точек с интенсивностью до 1 млн. точек в секунду. При этом расстояние между соседними точками визирования могут составлять 2 мм и менее.
Сканер 17 сканирует по горизонтали - в угле зрения (поворота камеры) 360°, а по вертикали - 270°. Следовательно, с двух-трех отметок можно провести полное сканирование дымовой трубы.
Для стабилизации в горизонтальной плоскости источники и приемники излучений размещены в гиростабилизированной капсуле, подвешенной на точечном шаровом шарнире 5 (фиг.2). Перед спуском устройства в дымовую трубу, оно размещается на монтажном столике светофорной площадки дымовой трубы, разбирается фланцевое соединение корпуса и снимается хвостовая часть корпуса с диском 6, обеспечивая возможность обслуживания капсулы. Устройство без хвостовой части устанавливается на монтажный столик. В ограждение капсулы устанавливаются патроны 23 с замерзшей водой. Приводятся во вращение оба ротора 10.
Работа устройства по варианту 3, аксонометрическая схема которого представлена на фиг.3, отличается от работы предыдущих вариантов устройств, главным образом, работой карданного подвеса. Карданный подвес состоит из охватывающего (с зазором) внутреннюю капсулу кольца 28 и двух пар осей, расположенных во взаимно перпендикулярных направлениях: внутренних осей 30 и внешних осей 29. Благодаря тому, что внутренние оси 30 подвеса, устанавливаются по отношению к капсуле выше центра масс капсулы, обеспечивается ее вертикальное положение. При транспортировке устройства на автомобиле устойчивость капсулы обеспечивается гибким распорным кольцом 51 из пенопласта, укладываемом в нижней части с охватом капсулы. При подготовке устройства к работе на монтажном столике гибкое кольцо 51 удаляется из него.
Работа крестовины карданного подвеса (фиг.4) заключается в том, что обеспечивается поворот устройства относительно капсулы, что позволяет капсуле сохранять вертикальную ось.
Работа элемента системы термостабилизации - съемного патрона с хладагентом (фиг.5), обеспечивающего утилизацию избытков теплоты от работающих приборов, осуществляется следующим образом. Перед использованием патрон заполняется водой 31, помещается в холодильник. После превращения воды в лед, патрон готов к использованию. Он устанавливается с помощью резьбового соединения 35 в ограждающую конструкцию 32 капсулы или (и) ограждающие конструкции приборных отсеков. Патрон закрыт крышкой 33, имеющей внутреннюю встроенную газовую полость 34 из эластичного материала емкостью до 5% объема патрона, которая предотвращает разрушение патрона при расширении замерзающей воды.
Работа варианта устройства, представленного на фиг.6, отличается тем, что в нем с помощью гидравлического демпфера 39 на тросовой подвеске 1 осуществляется гашение «вертикальных прыжков» устройства на начальном этапе спуска устройства в дымовую трубу. Кроме того, при раскачивании устройства на тросе 1 как на маятнике, охватывающий устройство карданный подвес (28, 29, 30) вместе с маховиком 36 обеспечивают постоянство вертикального положения оси устройства в целом. Однако, при этом устройство своей верхней частью будет приближаться к стенке дымовой трубы. Наиболее уязвимыми при таких соударениях устройства с дымовой трубой являются верхний и нижний аэродинамические диски 6, 14, которые имеют на периферийной части демпфирующее кольцевое покрытие 40.
Расположение осей 29, 30 карданного подвеса в горизонтальной плоскости выбрано значительно выше центра масс устройства, что обеспечивает защищенность устройства против «кувырка» (переворачивания на 180°).
Работа источников и приемников излучения 8, 9, 11, 18, 13 в данном варианте почти не отличается от работы аналогичных систем в предыдущих вариантах устройства.
Подготовка систем температурной и аэродинамической стабилизации устройства производится на монтажной площадке вблизи дымовой трубы или светофорной площадке, находящейся вблизи оголовка трубы. На светофорной площадке отсоединяется от устройства головной обтекатель и нижний диск 14, что позволяет привести маховик 36 в рабочее положение, т.е. разогнать его до скорости 3…4 тысяч оборотов в минуту. Для этого устройство без нижней части устанавливается на монтажный столик, показанный на фиг.7, оснащенный вертикальным серводвигателем 41, вал которого с помощью муфты 42 соединен с выдвигающимся фрикционным стаканом 43.
Из устройства, перед его установкой в кольцевые гнезда 44, демонтируется сферический обтекатель 15 вместе с нижним диском 14, для чего разбирается его нижнее фланцевое соединение. Затем откидываются посредством шарниров 45 гнезда 44 на монтажном столике, что обеспечивает пропуск габаритного маховика 36 внутрь монтажного столика. После этого гнезда заводятся под устройство, и в них опускается устройство. После проверки вертикальности устройство закрепляется в гнездах на монтажном столе. Устройство готово к раскрутке маховика. С этой целью приподнимается стол 49 сервомотора 41 и вместе со столом 49 приподнимаются сервомотор 41, его вал 50, обгонная муфта 42 и фрикционный стакан 43 до соприкосновения его с маховиком 36. Далее, включается двигатель и плавно доводит обороты маховика до 3000 об/мин и более. После этого к устройству вновь присоединяются головной обтекатель 15 и аэродинамический диск 14. Устройство готово для спуска в дымовую трубу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обследования внутренней поверхности промышленных вентиляционных и дымовых труб | 2022 |
|
RU2780468C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2232973C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2005 |
|
RU2300075C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2002 |
|
RU2228510C1 |
| ВЫСОКОТОЧНАЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ЛАЗЕРНОЙ ГИРОСТАБИЛИЗИРОВАННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И БОЕВОЙ ЧАСТЬЮ ПРОНИКАЮЩЕГО ТИПА | 2007 |
|
RU2352895C1 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152065C1 |
| ВЫСОКОТОЧНАЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, КРУГЛОСУТОЧНОГО И ВСЕПОГОДНОГО БОЕВОГО ПРИМЕНЕНИЯ С АППАРАТУРОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО НАВЕДЕНИЯ | 2007 |
|
RU2346232C1 |
| СПОСОБ СЕЛЕКЦИИ МОРСКОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2719393C1 |
| КОРРЕКТИРУЕМАЯ, САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 1999 |
|
RU2156954C1 |
Изобретение относится к измерительной технике и может быть использовано в теплоэнергетике для контроля футеровки функционирующей дымовой трубы. В способе кольцевая лазерная подсветка продольно перемещается с одновременным перемещением визирования отраженного изображения на подсвеченном участке поверхности трубы. Визирование отраженного сигнала осуществляется дискретно и периодически с гиростабилизированной горизонтальной платформы. Суждение о состоянии поверхности трубы осуществляют в зависимости от степени и формы искажения полученного кольцевого изображения. Способ реализуют два варианта устройства. Технический результат - расширение функциональных возможностей, повышение точности контроля, повышение надежности и уменьшение энергопотребления. 3 н. и 15 з.п. ф-лы, 7 ил.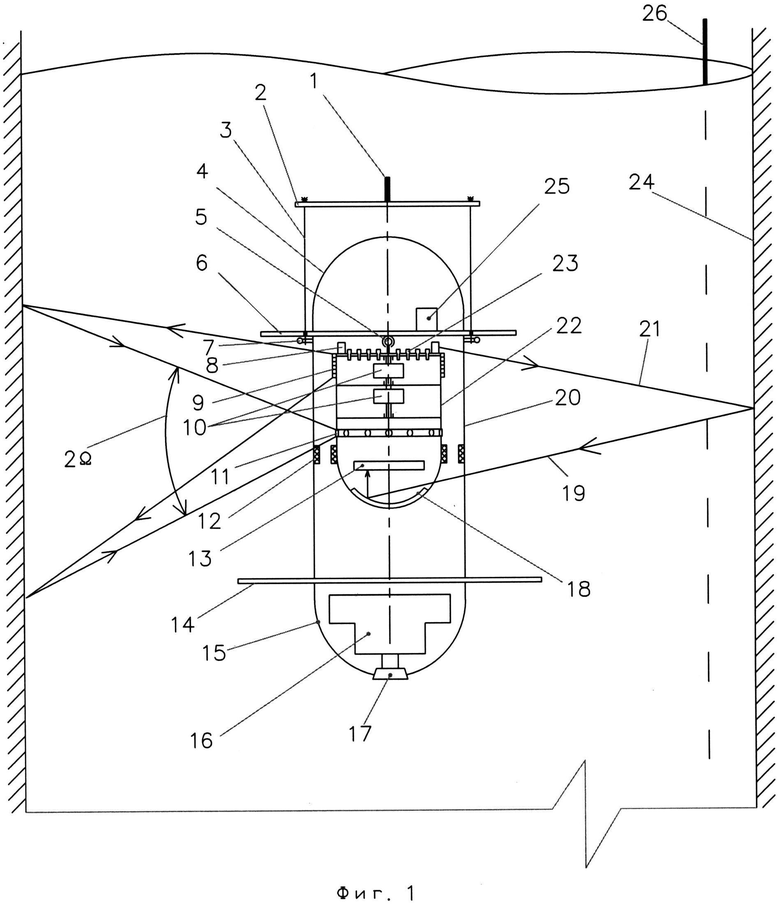
1. Способ контроля внутренней поверхности дымовой трубы, включающий продольное перемещение кольцевой подсветки и одновременное перемещение визирования отраженного изображения на подсвеченном участке поверхности трубы, суждение о состоянии внутренней поверхности трубы по степени и форме искажения полученного кольцевого изображения, отличающийся тем, что визирование отраженного сигнала осуществляют с движущегося устройства дискретно и периодически, при этом период цикла визирования не превышает отношения шага визирования, выбранного из условия получения заданной степени разрешения, к скорости перемещения движущегося устройства.
2. Способ по п.1, отличающийся тем, что визирование внутренней поверхности дымовой трубы осуществляют импульсно-фазным трехмерным лазерным сканером.
3. Способ по п.1, отличающийся тем, что контроль внутренней поверхности трубы осуществляют периодической кольцевой подсветкой поверхности белым светом светодиодов и синхронизированным с подсветкой фотографированием подсвеченных участков поверхности с периодом цикла, не превышающим частного от деления высоты полосы контроля на скорость продольного перемещения подсветки, корректировкой полученных изображений поверхности с помощью компьютерных программ и последующим их «сшиванием» в плоские развертки изображения кольцевой полосы, суждение о состоянии внутренней поверхности трубы проводят по степени и форме дефектов на откорректированных изображениях кольцевых полос внутренней поверхности дымовой трубы в форме разверток.
4. Способ по п.3, отличающийся тем, что контроль излучениями осуществляют со стабилизированной в горизонтальной плоскости гироплатформы.
5. Способ по п.3, отличающийся тем, что позиционирование устройства по вертикали внутри исследуемого объекта осуществляют лазерным дальномером или по результатам мониторинговых измерений угловой скорости шкива, диаметра тросовой намотки на шкиве и продолжительности вращения шкива, а позиционирование по азимутальному направлению - обзорной видеокамерой относительно вертикального репера, при этом в качестве репера преимущественно используют вертикальный трос, спущенный по внутренней стенке трубы.
6. Устройство для контроля внутренней поверхности дымовой трубы, содержащее корпус, состоящий из соединенных между собой головного полусферического обтекателя, цилиндрического кожуха, хвостового отсека с элементами тросовой подвески маятникового типа, излучатели и приемники излучений лазерного и оптического диапазонов, системы температурной и аэродинамической стабилизации, отличающееся тем, что тросовая подвеска имеет охватывающий цилиндрический корпус кольцевой карданный подвес, оси которого расположены выше центра масс корпуса, кроме того, корпус в центральной цилиндрической части разделен горизонтальной плоскостью на два обособленных блока, закрытых в месте раздела плоскими горизонтальными стенками и скрепленных неподвижно между собой полым цилиндром, расположенным по оси устройства, на полом цилиндре между блоками выше нижнего диска аэродинамической стабилизации установлен маховик, одновременно трос подвески устройства оснащен гидравлическим демпфером гашения вертикальных колебаний устройства.
7. Устройство по п.6, отличающееся тем, что система контроля оснащена трехмерным импульсно-фазным лазерным сканером, размещенным в головной части корпуса.
8. Устройство по п.6, отличающееся тем, что оснащено монтажным столиком с откидывающимися на шарнирах гнездами для вертикального ориентирования и закрепления устройства, а также подъемным столом сервомотора с фрикционным стаканом привода маховика.
9. Устройство по п.6, отличающееся тем, что система излучателей оптического диапазона выполнена из блока матриц светодиодов белого света, распределенных по периметру на внешней поверхности цилиндрического кожуха.
10. Устройство по п.9, отличающееся тем, что в системе температурной стабилизации используются установленные в перегородках съемные охлаждающие патроны с затвердевшим после охлаждения веществом, имеющим температуру плавления, не превышающую предельно допустимую температуру в приборном отсеке.
11. Устройство по п.9, отличающееся тем, что диски системы аэродинамической стабилизации в периферийной части имеют гибкие вставки, а цилиндрический корпус с внешней стороны покрыт слоем кислотостойкой тепловой изоляции и окрашен в серебристый цвет.
12. Устройство по п.9, отличающееся тем, что головной полусферический обтекатель оснащен лазерным дальномером, совмещенным с обзорной видеокамерой.
13. Устройство для контроля внутренней поверхности дымовой трубы, содержащее корпус, состоящий из соединенных между собой головного полусферического обтекателя, цилиндрического кожуха, хвостового отсека с элементами тросовой подвески маятникового типа, излучатели и приемники излучений лазерного и оптического диапазонов, системы температурной и аэродинамической стабилизации, отличающееся тем, что внутри цилиндрического кожуха на точечном шаровом шарнире подвешена капсула с размещенными в ней излучателями и приемниками систем оптической визуализации, при этом цилиндрический кожух капсулы и цилиндрический кожух всего устройства при вертикальных положениях расположены коаксиально друг относительно друга.
14. Устройство по п.13, отличающееся тем, что в месте возможного соударения капсулы с кожухом устройства с наружной поверхности капсулы и на внутренней поверхности цилиндрического кожуха установлены амортизирующие вставки из упругого материала.
15. Устройство по п.13, отличающееся тем, что капсула оснащена не менее чем одним ротором, обеспечивающим вертикальное положение капсулы, при этом направления вращений роторов преимущественно взаимно противоположные.
16. Устройство по п.13, отличающееся тем, что в системе температурной стабилизации используются установленные в перегородках съемные охлаждающие патроны с затвердевшим после охлаждения веществом, имеющим температуру плавления, не превышающую предельно допустимую температуру в приборном отсеке.
17. Устройство по п.13, отличающееся тем, что головной полусферический обтекатель оснащен лазерным дальномером, совмещенным с обзорной видеокамерой.
18. Устройство по п.13, отличающееся тем, что цилиндрический кожух всего устройства с внешней стороны покрыт слоем кислотостойкой тепловой изоляции и окрашен в серебристый цвет.
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2152065C1 |
| JP 2004101190 A, 02.04.2004 | |||
| WO 1997002480 A1, 23.01.1997 | |||
| DE 202007017822 U1, 17.04.2008 | |||

