Изобретение относится к измерительной технике и может быть использовано в теплоэнергетике для контроля состояния внутренних поверхностей дымовых труб без останова котлов.
Известен способ контроля внутренней поверхности дымовой трубы и устройство для его осуществления, включающие подсветку внутренней поверхности трубы источником света, визирование подсвеченного участка камерой, суждение о состоянии поверхности по полученному изображению [1].
В этом техническом решении подсветку осуществляют от автономного источника света, а в качестве камеры используют автоматический фотоаппарат.
Недостатками технического решения являются: необходимость останова котлов на период оценки состояния внутренней поверхности трубы, большая длительность проведения контроля, получаемые фотоснимки не содержат информации о глубине дефектов контролируемой поверхности, поскольку за дефекты могут быть приняты поверхности с осажденной сажей, что в целом снижает достоверность и точность контроля.
Наиболее близким техническим решением для заявленного способа является способ контроля внутренней поверхности дымовой трубы, включающий подсветку внутренней поверхности трубы, визирование подсвеченного участка на внутренней поверхности трубы, суждение о состоянии поверхности по полученному изображению [2].
Наиболее близким техническим решением для заявленного устройства является устройство для контроля внутренней поверхности дымовой трубы, содержащее источник подсветки, видеосистему, выполненную из по меньшей мере одной камеры с возможностью визирования изображения внутренней поверхности трубы [2].
В известном способе и устройстве подсветку осуществляют световым источником, а видеосистема содержит пять камер, способных одновременно визировать изображение внутренней поверхности трубы. При одновременном перемещении источника подсветки и камер вдоль продольной оси трубы производят анализ контролируемой поверхности без останова котлов. Например, если повреждение замечено, оператор может останавливать спуск устройства, выбирать наиболее удобно ориентируемую камеру из пяти доступных и фокусировать изображение на повреждении, чтобы исследовать его более подробно. Таким образом, по сравнению с предыдущим техническим решением удается повысить оперативность проведения контроля состояния поверхности трубы.
Однако анализ состояния поверхности с помощью пяти камер и дальнейшее фокусирование одной из них снижает скорость проведения контроля всей внутренней поверхности. Электромагнитное световое излучение источника никак не связано с получаемым изображением и служит лишь для подсветки поверхности. Основным ограничением является низкая достоверность контроля, так как невозможно измерить глубину дефекта, в то же время темные пятна на поверхности трубы, обусловленные, например, отложениями сажи, могут восприниматься как дефекты. Наличие же пяти камер усложняет конструкцию устройства, поскольку каждая из камер является независимой со своим объективом, и необходимо отслеживать информацию, какая из камер направлена на дефект.
Решаемая изобретением задача - расширение функциональных возможностей и повышение качества контроля.
Технический результат, который может быть получен при осуществлении заявленного способа, - повышение точности, достоверности и скорости контроля.
Технический результат, который может быть получен при выполнении заявленного устройства, - повышение точности контроля и упрощение конструкции.
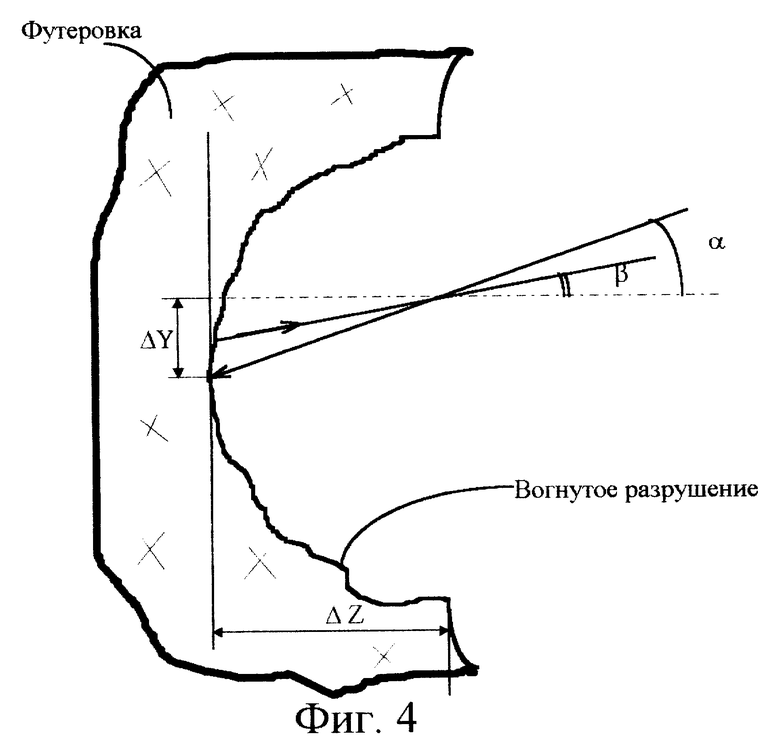
Для решения поставленной задачи в известном способе контроля внутренней поверхности дымовой трубы, включающем подсветку внутренней поверхности трубы, визирование подсвеченного участка на внутренней поверхности трубы, суждение о состоянии поверхности по полученному изображению, согласно изобретению подсветку формируют лазерным излучением в форме кольца на внутренней поверхности трубы, трансформируют изображение подсвеченного участка в поперечную плоскость трубы, а суждение о состоянии поверхности производят по степени и форме искажения полученного кольцевого изображения в упомянутой поперечной плоскости в соответствии с математическим выражением,
ΔZ = ΔY/(tgα-tgβ),
где ΔZ - истинное значение глубины дефекта,
ΔY - измеренная величина искривления кольцевого изображения в поперечной плоскости,
α - угол падения пучка лазерного излучения на поверхность трубы, определяемый как угол между осью пучка зондирующего лазерного излучения и нормалью к контролируемой поверхности трубы,
β - угол визирования, определяемый как угол между направлением визирования на контролируемую поверхность трубы и нормалью к этой поверхности.
Возможен дополнительный вариант осуществления способа, в котором целесообразно, чтобы подсветку перемещали вдоль продольной оси трубы с одновременным перемещением трансформируемого изображения.
Для решения поставленной задачи в известном устройстве для контроля внутренней поверхности дымовой трубы, содержащем источник подсветки, оптическую систему в виде объектива, выполненную с возможностью визирования изображения внутренней поверхности трубы, согласно изобретению в качестве источника подсветки выбран лазер, снабженный коническим отражателем электромагнитного излучения, перед объективом установлены зеркальный объектив и компенсатор кривизны, установленные вдоль продольной оси трубы с возможностью проецирования кольцевого изображения внутренней поверхности трубы в ее поперечную плоскость, за объективом установлен приемник, а между источником подсветки и коническим отражателем установлена линза.
Возможны дополнительные варианты выполнения устройства, в которых целесообразно, чтобы:
- источник подсветки был выполнен из полупроводниковых лазеров, а конический отражатель был выполнен в виде элементов системы отражателей, причем каждый из полупроводниковых лазеров был бы расположен на одинаковом расстоянии от продольной оси трубы в одной поперечной плоскости с возможностью направления лазерного пучка на один из элементов системы отражателей посредством линз для формирования лазерного пучка, установленных между полупроводниковыми лазерами и соответствующими элементами системы отражателей;
- был введен электронный блок обработки, вход которого соединен с выходом приемника и который был бы предназначен для записи сигнала приемника или для передачи его по проводным либо беспроводным линиям связи на видеомонитор, расположенный за пределами трубы, или для преобразования сигнала в цифровую форму для оценки глубины дефекта.
Указанные преимущества, а также особенности настоящего изобретения поясняются лучшим вариантом его осуществления со ссылками на прилагаемые рисунки.
Фиг. 1 схематично изображает устройство для контроля внутренней поверхности дымовой трубы;
фиг. 2 - спроецированное изображение в поперечную плоскость трубы в случае наличия трещины в футеровке трубы;
фиг. 3 - то же, что фиг. 2, в случае выступа в футеровке трубы, образованного отложениями на ее поверхности;
фиг. 4 - схему, поясняющую взаимосвязь истинного значения глубины дефекта с измеренной величиной искривления кольцевого изображения в поперечной плоскости трубы;
фиг. 5 - вариант выполнения источника излучения из полупроводниковых лазеров с элементами системы отражателей (схематично, в продольном сечении).
Поскольку заявленный способ реализуется при функционировании устройства для контроля внутренней поверхности дымовой трубы, то его описание приведено при описании работы устройства.
Устройство для контроля внутренней поверхности дымовой трубы (фиг. 1) содержит источник 1 подсветки, оптическую систему 6 в виде объектива 9, выполненную с возможностью визирования изображения внутренней поверхности трубы 3 на приемник 4.
Источник 1 выполнен лазерным и снабжен коническим отражателем 5 электромагнитного излучения. Источник 1 и конический отражатель 5 установлены вдоль продольной оси трубы 3. В оптическую систему 6, выполненную с возможностью проецирования изображения кольцевого периметра трубы 3 в ее поперечную плоскость кроме объектива 9 введены зеркальный объектив 7, компенсатор 8 кривизны, а приемник 4 установлен на продольной оси трубы в упомянутой поперечной плоскости.
Такое выполнение устройства дополнительно упрощает его конструкцию, поскольку при известности внутреннего диаметра трубы 3 и геометрических размеров остальных элементов легко произвести фокусирование кольцевого изображения трубы 3 в поперечную плоскость и не требуется, как в ближайшем аналоге, производить фокусирование по отдельности каждой камеры. В заявленном устройстве камера может иметь простую конструкцию с одним объективом 9.
Для дополнительного повышения точности измерений может быть введена линза 10 для формирования параллельного лазерного пучка от источника 1, установленная на продольной оси трубы 3 между лазером и коническим отражателем 5. Линза 10 позволяет сформировать достаточно узкий пучок, чтобы точно определить месторасположение дефекта вдоль продольной оси трубы 3.
Может быть также введен электронный блок 11 обработки, вход которого соединен с выходом приемника 4. В зависимости от области применения и функционального назначения устройства в целом электронный блок 11 может, например, записывать видеосигнал приемника 4 электронными или магнитными средствами для его дальнейшего анализа. Или электронный блок 11 может служить для передачи сигнала по проводным либо беспроводным линиям связи на видеомонитор (на фиг. 1 не показан), расположенный за пределами трубы 3. Кроме того, электронный блок 11 в случае другого его функционального исполнения может служить преобразователем видеосигнала в цифровую форму для последующей оценки процессором глубины обнаруженного дефекта. Однако сам дефект в заявленном устройстве может быть оценен по величине искажения полученного изображения в поперечной плоскости (фиг. 2-4). Поэтому расширяются функциональные возможности устройства в целом, и электронный блок 11 может быть выполнен с использованием различных технических средств, а для простого визуального контроля внутренней поверхности трубы 3 может быть использован, как и в ближайшем аналоге, видеомонитор, однако на экране монитора при применении заявленного устройства будет наблюдаться не чередование пятен, например, от отложений сажи, а непосредственно кольцевое изображение с соответствующей глубиной выпуклости или впадины (фиг. 2, 3).
Для обеспечения возможности контролировать как все кольцевое изображение, так и отдельные его участки, а также для уменьшения габаритов устройства источник 1 подсветки (фиг. 5) может быть выполнен из полупроводниковых лазеров 12, а конический отражатель 5 может быть выполнен в виде элементов 13 системы отражателей. Каждый из полупроводниковых лазеров 12 в этом случае расположен на одинаковом расстоянии от продольной оси трубы 3 в одной поперечной плоскости с возможностью направления лазерного пучка на один из элементов 13 системы отражателей посредством линз 14 для формирования лазерного пучка. Линзы 14 в этом случае установлены между полупроводниковыми лазерами 12 и соответствующими элементами 13 системы отражателей. Внешняя, направленная к трубе 3, поверхность элементов 13 системы отражателей для этого варианта образует один конический отражатель 5. При запитке полупроводниковых лазеров 12 совместно или по отдельности можно производить подсветку внутренней поверхности трубы 3 по всему кольцевому профилю или отдельных его участков. Кроме того, поскольку положение полупроводниковых лазеров 12 при перемещении устройства вдоль продольной оси трубы не изменяется, при подключении отдельных полупроводниковых лазеров легко определить месторасположение дефекта внутренней поверхности трубы.
Работает устройство (фиг. 1) следующим образом.
Подсветку формируют в форме кольца на периметре трубы лазерным излучением от источника 1. Для этого лазерный пучок проходит через линзу 10 и отражается коническим отражателем 5, например, выполненным зеркальным, по периметру внутренней контролируемой поверхности трубы 3. Таким образом, в отличие от известного способа получают не размытое неопределенным образом световое пятно, а создают на контролируемой поверхности световую кольцевую полосу.
Затем, трансформируют изображение подсвеченного участка в поперечную плоскость. Для этого зеркальный объектив 7 формирует изображение кольцевой полосы, искаженной на дефектах контролируемой поверхности на поверхности изображения (фиг. 2, 3). Компенсатор 8 кривизны поля зрения совместно с объективом 9 камеры проецирует изображение на чувствительный слой приемника 4 излучения.
Суждение о состоянии внутренней поверхности трубы 3 производят по степени и форме искажения полученного кольцевого изображения в поперечной плоскости. Благодаря тому, что на контролируемую поверхность проецируется кольцевая полоса от лазера, появляется возможность контролировать и измерять глубину дефектов (фиг. 2,3).
Для контроля всей внутренней поверхности трубы 3 устройство совместно с источником 1 и оптической системой 6 перемещают вдоль продольной оси трубы 3 (фиг. 1).
Суждение о состоянии поверхности (фиг. 4) осуществляют в соответствии с указанной ранее формулой ΔZ = ΔY/(tgα-tgβ), по которой определяют глубину дефекта впадины или выпуклости (фиг. 2, 3).
Наиболее успешно заявленные способ контроля внутренней поверхности дымовой трубы и устройство для его осуществления могут быть использованы в теплоэнергетике для контроля состояния внутренних поверхностей дымовых труб без останова котлов. Изготовление устройства может быть осуществлено при помощи существующей элементной базы на предприятиях оптико- электронной промышленности.
Источники информации:
[1] . "Руководство по обследованию и содержанию в исправном состоянии кирпичных и железобетонных труб". Международный комитет по промышленным дымовым трубам "СИСИНД", 1992 г., стр. 194.
[2] . "Представление новой горячей камеры для интерактивного просмотра дымовых труб изнутри", G. Oudin, Доклад на 48 Конференции СИСНД, Германия, Кельн, 26.04.97.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| СПОСОБ КОНТРОЛЯ НЕГАБАРИТНОСТИ РАЗМЕЩЕНИЯ ОБОРУДОВАНИЯ В ТУННЕЛЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2456544C2 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ ПОВЕРХНОСТИ | 2016 |
|
RU2650840C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2012 |
|
RU2528033C2 |
| КОРПУС МОДУЛЯ ДЛЯ РАЗМЕЩЕНИЯ ИССЛЕДОВАТЕЛЬСКОЙ АППАРАТУРЫ | 2003 |
|
RU2256241C2 |
| ПОРТАТИВНОЕ ЛАЗЕРНОЕ ЗАЩИТНОЕ УСТРОЙСТВО | 2001 |
|
RU2197010C1 |
| СИСТЕМА ОТКРЫТОЙ ОПТИЧЕСКОЙ СВЯЗИ | 2001 |
|
RU2212763C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2002 |
|
RU2273824C2 |
| АВТОНОМНОЕ ЛАЗЕРНОЕ ЗАЩИТНОЕ УСТРОЙСТВО И СПОСОБ ЕГО ПРИМЕНЕНИЯ ДЛЯ ЗАЩИТЫ ОТ НАПАДЕНИЯ | 2001 |
|
RU2197009C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ И ТЕКСТОВОЙ ИНФОРМАЦИИ | 2005 |
|
RU2305865C2 |



Изобретение относится к измерительной технике и может быть использовано в теплоэнергетике для контроля состояния внутренних поверхностей дымовых труб без останова котла. Способ включает подсветку внутренней поверхности трубы, визирование подсвеченного участка по периметру трубы, суждение о состоянии поверхности по полученному изображению. Подсветку формируют лазерным излучением в форме кольца на внутренней поверхности трубы, трансформируют изображение подсвеченного участка в поперечную плоскость, а суждение о состоянии поверхности производят по степени и форме искажения полученного кольцевого изображения в поперечной плоскости. Устройство имеет источник подсветки, оптическую систему и приемник излучения. В качестве источника подсветки используется лазер, снабженный коническим отражателем электромагнитного излучения. Оптическая система выполнена с возможностью проецирования изображения кольцевого периметра трубы в ее поперечную плоскость, а приемник установлен в поперечной плоскости трубы. С помощью данного изобретения расширяются функциональные возможности и повышается точность контроля. 2 с. и 3 з.п.ф-лы, 5 ил.
ΔZ = ΔY/(tgα-tgβ),
где ΔZ - истинное значение глубины дефекта;
ΔY - измеренная величина искривления кольцевого изображения в поперечной плоскости;
α - угол падения пучка лазерного излучения на поверхность трубы, определяемый как угол между осью пучка лазерного излучения и нормалью к контролируемой поверхности трубы;
β - угол визирования, определяемый как угол между направлением визирования на контролируемую поверхность трубы и нормалью к этой поверхности.
| Представление новой горячей камеры для интерактивного просмотра дымовых труб изнутри | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| US 4557598 A, 10.12.85 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| US 444496 A, 03.04.84 | |||
| Устройство для получения изображения внутренней поверхности полых тел | 1984 |
|
SU1190335A2 |

