Изобретение относится к измерительным системам, а именно к средствам контроля состояния конструкции и шасси летательного аппарата, и может быть использовано в различных транспортных средствах (самолетах, вертолетах, беспилотных летательных аппаратах и др.).
Наиболее близким к изобретению является способ контроля состояния конструкции летательного аппарата, заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состоянии каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состояния шин летательного аппарата и возникновении неисправности в период его взлета или посадки (Патент РФ на изобретение, М.кл. G01M 17/02, G01S 13/88, опубл. 27.02.2012).
Недостатком известного способа является заниженная надежность контроля технического состояния шин, обусловленная тем, что при нахождении в диаграмме направленности всей шины в отраженном от шины сигнале будут одновременно присутствовать гармоники, имеющие одинаковую частоту, но противоположный фазовый сдвиг, это приведет к уничтожению гармоник при их сложении. Это вызвано тем, что при вращении шины образуются набегающие и убегающие области, которые формируют равные по частоте гармоники, но противоположные по фазе. При нахождении в диаграмме направленности микрорадара только части шины исключит формирование противофазных гармоник.
Техническим результатом изобретения является повышение надежности контроля технического состояния шин за счет исключения формирования противофазных гармоник.
Технический результат достигается тем, что способ контроля состояния конструкции летательного аппарата, заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, при этом в обшивке планера летательного аппарата в районе шасси устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, дополнительно устанавливают микрорадары так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная передняя или задняя часть «своей» шины, излучают в направлении каждой из частей шин радиолокационный сигнал и принимают отраженный от части шин сигнал.
Заявляемый способ реализуется в устройстве контроля состояния конструкции летательного аппарата (Патент РФ на изобретение, М.кл. G01M 17/02, G01S 13/88, опубл. 27.02.2012), которое содержит установленные на борту летательного аппарата первое устройство обнаружения, устройство сбора информации, бортовое устройство, блок сигнализации аварийного состояния, блок питания, при этом первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 микросекунд при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора информации, выход бортового устройства соединен с входом первого устройства обнаружения, второй выход блока питания соединен со вторым входом блока сигнализации аварийного состояния, первый выход блока питания соединен с входом бортового устройства, второе устройство обнаружения, блок датчиков, индикатор тревоги, причем первый, второй и третий входы второго устройства обнаружения соединены соответственно с первым, вторым и третьим выходами блока датчиков, а выходы второго устройства обнаружения соединены с группой третьих входов устройства сбора информации, второй выход которого соединен с выходом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера.
Кроме того, второе устройство обнаружения содержит элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, причем первый, второй и третий входы второго устройства обнаружения являются первым, вторым входами элемента И, входом элемента НЕ, выход которого соединен с третьим входом элемента И, выход которого соединен со вторыми входами n микрорадаров, выходы n аналого-цифровых преобразователей являются выходами второго устройства обнаружения.
Кроме того, устройство сбора информации определяет параметры состояния шины в соответствии с алгоритмом анализа выбранных гармоник отраженных сигналов от облученной шины, заключающемся в осуществление выбора диапазона гармоник отраженных сигналов на основе оценки усредненной энергии гармоник, оценки центра массы распределения гармоник и возможности определения параметров, связанных с шиной, определении параметров: балансировка и юстировка в диапазоне от 1-й до 2-й гармоники, расслоение ленты протектора и неравномерный износ протектора в диапазоне от 3-й до n-гармоники, где n - фундаментальная гармоника, связанная с шаблоном протектора, износ протектора определяется в диапазоне от n- и до m-й гармоники, где m является верхним обертоном энергии шаблона протектора.
Новым признаком, обладающим существенными отличиями по способу, является следующая совокупность действий.
Устанавливают микрорадары так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная передняя или задняя часть «своей» шины, излучают в направлении каждой из частей шин радиолокационный сигнал и принимают отраженный от части шин сигнал.
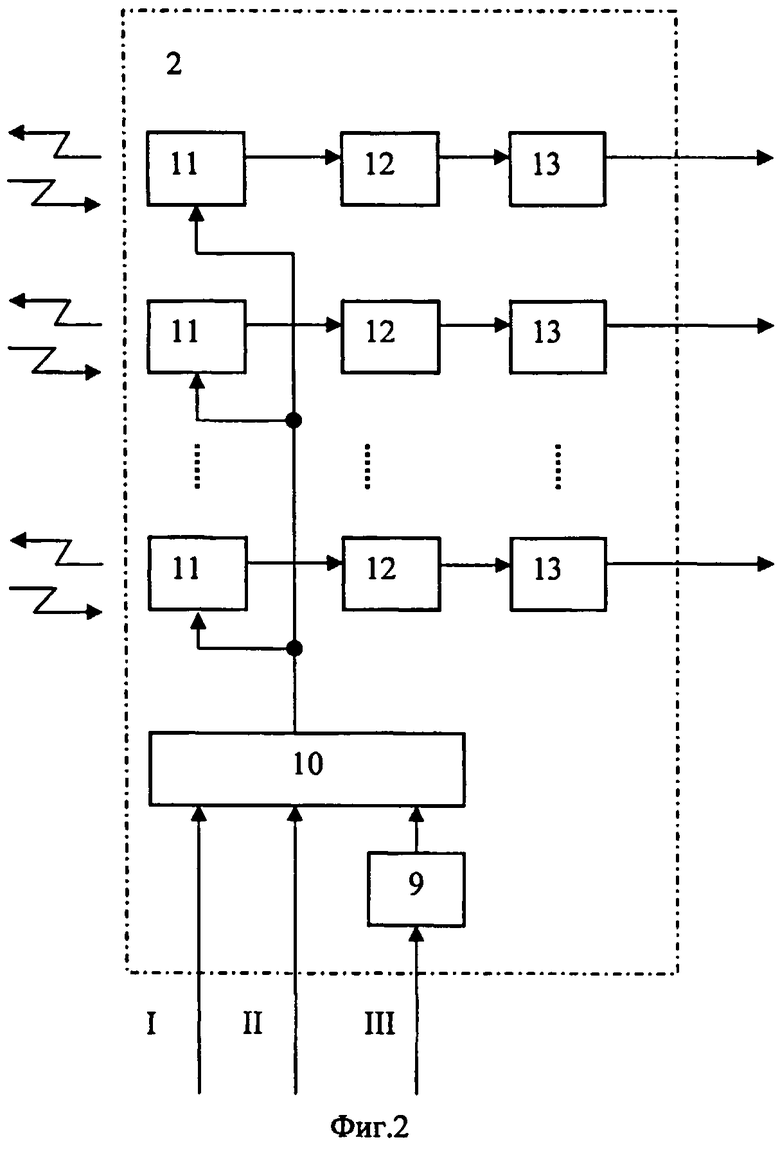
На фиг. 1 приведена функциональная схема устройства, на фиг. 2 - функциональная схема второго устройства обнаружения.
Устройство содержит установленное на борту летательного аппарата первое 1 и второе 2 устройство обнаружения, устройство 3 сбора информации, блок 4 сигнализации аварийного состояния, бортовое устройство 5, блок 6 питания, блок 7 датчиков, индикатор 8 тревоги.
Второе устройство 2 обнаружения состоит из элемента НЕ 9, элемента И 10, последовательно соединенных n микрорадаров 11, n усилителей 12, n аналого-цифровых преобразователей 13.
Блок 7 датчиков состоит из блока 14 концевых выключателей шасси летательного аппарата, датчика 15 движения, высотомера 16.
Способ контроля состояния конструкции летательного аппарата реализуется следующим образом.
Самолеты оборудуются системой постоянного контроля, осуществляемого на протяжении всего полезного срока службы самолета. Как правило, этот полезный срок службы включает в себя фазы полета и фазы стоянок в аэропорту или в техническом ангаре. Система контроля является электронной системой с питанием от бортовой сети. Постоянное электрическое питание, поддерживаемое во время фаз стоянок, позволяет произвести исследования по всем событиям, произошедшим с самолетом. При ударах или столкновениях, а также больших усилиях, которым подвергается конструкция самолета, в местах ударов или столкновений или в зоне напряжения происходит излучение звуковой волны. Поэтому в чувствительных местах упомянутых критических частей (узлов) устанавливаются наборы пьезоэлектрических датчиков. Эти датчики соединены с электронной системой и выдают на нее сигнал сразу при возникновении какого-либо события.
При применении способа измеряют мощные импульсы механических волн, спектральные составляющие которых на практике находятся в пределах от 20 кГц до 2 МГц. Акустическая схема позволяет анализировать в режиме реального времени данные: характеристики импульсов (высокочастотных сигналов) во временной области. Можно также предусмотреть анализ их частотных характеристик. Она позволяет также локализовать акустические источники по зоне или ячейке, распознавать и классифицировать акустические источники в реальном времени и автоматически фильтровать и сохранять в памяти акустические импульсы в зависимости от их характеристик и выделять из них данные, характерные для определенного явления.
Пьезоэлектрические датчики устанавливают в зонах, включающих: купол радиолокационной антенны; передние кромки крыльев и хвостового оперения.
При этом первое 1 устройство обнаружения, состоящее из множества пьезоэлектрических датчиков, обеспечивает непрерывный мониторинг каждой зоны летательного аппарата и измерение сигнала в течение около 100 микросекунд при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, при этом упомянутый порог изменяют в зависимости от того, находится самолет в полете или на стоянке.
Сигналы с первого и второго выхода первого 1 устройства обнаружения поступают соответственно на первые и вторые входы устройства 3 сбора информации непосредственно и через блок 4 сигнализации аварийного состояния.
При этом устройство 3 сбора информации считывает и обрабатывает сигналы, поступающие от пьезоэлектрических датчиков во время полезного срока службы самолета на земле и в воздухе, подтверждает исправную работу совокупности пьезоэлектрических датчиков, а также подает сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования.
Устройство 1 сбора информации, поступающей от датчиков, включает в себя: преобразователь акустического сигнала в аналоговый электрический сигнал, цифровой блок обработки сигнала, супервизор (контроллер), обеспечивающий сбор и передачу данных в запоминающее устройство, детектирование неисправностей системы и координирование своевременного считывания данных цифровым блоком обработки данных, поступающих в буферные запоминающие устройства и массовые запоминающие устройства (ЗУ) сверхбольшой емкости, позволяющие системе собирать большие количества данных, устройство диагностики, связанное с супервизором и конфигурированное для постоянной загрузки, записи, считывания и обработки сигналов, поступающих от пьезоэлектрических датчиков во время полезного срока службы самолета на земле и в воздухе, вывода данных на дисплей, конфигурацию и калибровку оборудования, включая пороговые значения параметров оборудования в зависимости от того, находится самолет в полете или на земле, времена релаксации после события, передачи данных в массовое ЗУ, а также для подтверждения исправной работы указанного множества пьезоэлектрических датчиков.
Бортовое устройство 5 обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, при этом сигнал с выхода бортового устройства поступает на вход первого устройства обнаружения.
Для обеспечения постоянного питания системы мониторинга осуществляют постоянный контроль подачи электрической энергии и, в случае необходимости, подключают аварийную батарею, при этом напряжение питания со второго выхода блока 6 питания поступает на второй вход блока 4 сигнализации аварийного состояния, а напряжение с первого выхода блока 6 питания поступает на вход бортового устройства 5.
Шасси летательного аппарата являются неотъемлемой частью его конструкции. Наиболее уязвимым элементом современных шасси, как показывает практика, являются шины. Достаточно часто неисправности шин летательных аппаратов приводят к предпосылкам к летным происшествиям, авариям и катастрофам. Одной из причин такого положения вещей является отсутствие мониторинга технического состояния шин летательного аппарата в основные периоды их реального функционирования - периоды взлета и посадки летательного аппарата, а также отсутствие информирования экипажа (оператора) летательного аппарата о текущем техническом состояния шин летательного аппарата и возникновении неисправности в период взлета или посадки. Предлагаемое устройство позволяет устранить вышеуказанные недостатки. Для этого в период выруливания на ВПП и взлета летательного аппарата сигналы соответственно от блока 14 концевых выключателей шасси летательного аппарата, датчика 15 движения, высотомера 16, входящих в состав блока 7 датчиков, поступают на первый, второй и третий входы второго 2 устройства обнаружения и соответственно на первый и второй входы элемента И, непосредственно и на третий вход элемента И, через элемент НЕ.
В режиме выруливания на ВПП и взлета летательного аппарата из блока 7 датчиков выдается определенная комбинация сигналов на первый, второй и третий входы элемента И 10, чем обеспечивается излучение n микрорадаров 11 в направлении частей шин за счет выдачи разрешающего сигнала с выхода элемента И 10, на вторые входы n микрорадаров 11.
Отраженные от частей шин сигналы усиливаются n усилителями 12, переводятся из аналогового вида в цифровой n аналого-цифровыми преобразователями 13 и поступают на n-третьи входы устройства 3 сбора информации.
Устройство 3 сбора информации дополнительно обрабатывает поступающие сигналы по алгоритму [2], основанному на анализе выбранных гармоник отраженных сигналов и заключающемуся в осуществлении выбора диапазона гармоник отраженных сигналов на основе оценки усредненной энергии гармоник, оценки центра массы распределения гармоник и определения параметров, связанных с шиной, определении параметров или аномалий: балансировка и юстировка в диапазоне от 1-й до 2-й гармоники, расслоение ленты протектора и неравномерный износ протектора в диапазоне от 3-й до n-гармоники, где n - фундаментальная гармоника, связанная с шаблоном протектора, износ протектора определяется в диапазоне от n-й до m-й гармоники, где m является верхним обертоном энергии шаблона протектора.
В результате обработки сигналов устройство 3 сбора информации определяет текущее техническое состояние параметров каждой шины шасси летательного аппарата, и информация об этом записывается в накопитель устройства 3 сбора информации и в защищенный бортовой накопитель информации. После взлета летательного аппарата и уборки шасси срабатывает блок концевых выключателей, и n микрорадаров 11 прекращают излучение. Перед посадкой летательного аппарата летчик выпускает шасси. После выпуска шасси опять срабатывает блок 14 концевых выключателей шасси летательного аппарата, и при посадке летательного аппарата восстанавливается излучение n микрорадаров 11 в направлении шин, которое продолжается до заруливания летательного аппарата на стоянку. После остановки самолета исчезает сигнал на втором входе элемента И 10, что приводит к прекращению излучения n микрорадаров 11. Устройство 3 сбора информации в результате обработки поступившей информации определяет текущее техническое состояние каждой шины шасси летательного аппарата, и информация об этом вновь записывается в накопитель устройства 3 сбора информации и в защищенный бортовой накопитель информации.
Таким образом, в результате применения предлагаемого способа повышается надежность мониторинга технического состояния шин шасси летательного аппарата на этапах его взлета и посадки, что в настоящее время не осуществляется никаким другим устройством. Кроме того, в результате анализа записанной информации за цикл полетов появляется возможность оценки изменения технического состояния каждой шины в течение этого цикла с учетом времени года, погодных условий, состояния аэродромов, географии полетов. При переходе любой из шин в неисправное состояние (расслоение протектора, повышенный износ, разбалансировка и т.д.) на втором выходе устройства 3 сбора информации формируется сигнал, который поступает на вход индикатора 8 тревоги, который при его поступлении информирует экипаж о возникшей неисправности.
При возникновении аварии (катастрофы) в процессе взлета или посадки летательного аппарата при использовании предлагаемого устройства появляется возможность за счет анализа информации из защищенного бортового накопителя информации оценить качество функционирования и техническое состояние шин шасси до момента и в момент аварии (катастрофы).
Таким образом, использование предложенного способа позволит повысить надежность контроля технического состояния конструкции летательного аппарата за счет мониторинга технического состояния шин шасси на этапах взлета и посадки, а также безопасность полетов за счет информирования экипажа о возникновении неисправности в системе шин шасси летательного аппарата.
Источники информации
1. Патент РФ на изобретение, М.кл. G01M 17/02, G01S 13/88, 27.02.2012 г. (прототип).
2. Патент США на изобретение US 7082819 (ЕР 1542035).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502058C1 |
| Способ мониторинга технического состояния планера и шасси летательного аппарата и устройство для его осуществления | 2017 |
|
RU2678540C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ВЫКАТЫВАНИЯ ВОЗДУШНЫХ СУДОВ ЗА ПРЕДЕЛЫ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2557871C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРЕДПОЛЕТНОГО КОНТРОЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545156C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2411541C2 |
| УСТРОЙСТВО И СПОСОБ ЗАЩИТЫ ОТ ПРОНИКНОВЕНИЙ В ОТСЕКИ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2459266C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ САМОЛЕТА | 2006 |
|
RU2385456C2 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ САМОЛЕТА | 2014 |
|
RU2554050C1 |
Способ контроля состояния конструкции летательного аппарата относится к измерительным системам контроля конструкции и шасси летательного аппарата (ЛА). Производят мониторинг ряда зон с помощью пьезоэлектрических датчиков на частях конструкции. Производят определенным образом измерения сигнала акустической волны, которые преобразуют в аналоговые электрические сигналы. Считывают и обрабатывают сигналы в цифровом блоке обработки. Контролируют исправную работу совокупности пьезоэлектрических датчиков. При помощи установленных в обшивке планера ЛА в районе шасси микрорадаров излучают в район шасси радиолокационный сигнал и принимают отраженный сигнал до момента взлета и от момента посадки до остановки ЛА. По анализу отраженного сигнала определяют техническое состояние каждой шины шасси. Обеспечивается безопасность взлета и посадки ЛА. 2 ил.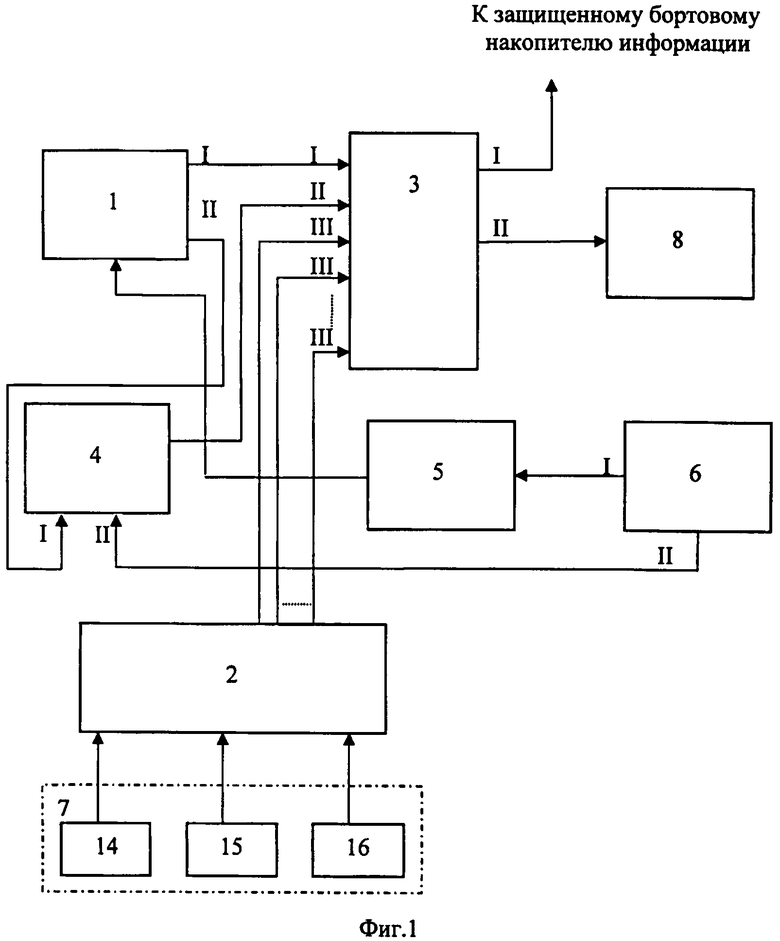
Способ контроля состояния конструкции летательного аппарата, заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, при этом в обшивке планера летательного аппарата в районе шасси устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, отличающийся тем, что устанавливают микрорадары так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная передняя или задняя часть «своей» шины, излучают в направлении каждой из частей шин радиолокационный сигнал и принимают отраженный от части шин сигнал.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ САМОЛЕТА | 2006 |
|
RU2385456C2 |
| US 7082819 B2, 01.08.2006 | |||
| US 6170334 B1, 09.01.2001 | |||

