Изобретение относится к области приборостроения и может быть использовано при выполнении предполетного контроля летательных аппаратов.
Назначение автоматизированного предполетного контроля летательного аппарата - окончательная проверка его готовности к полету, а также выявление неисправностей и недостатков, которые могли появиться при стоянке летательного аппарата и его подготовке к вылету.
Известен способ информационного обеспечения процесса загрузки, контроля массы летательного аппарата перед вылетом, заключающийся в размещении датчиков давления, непосредственно на летательном аппарате, в месте крепления стоек шасси к конструкции летательного аппарата, формировании в датчиках давления, при действии на них массы летательного аппарата, сигналов преобразования в численные величины массы летательного аппарата и положения его центра масс относительно продольной и поперечной осей процессором, отображении информации экипажу о массе летательного аппарата и положении его центра масс относительно продольной и поперечной осей перед взлетом на дисплее, сравнении текущей массы летательного аппарата с допустимым значением, выдаче сигнала запрета вылета летательного аппарата в случае, если текущее значение массы летательного аппарата и положение его центра масс перед взлетом больше допустимого значения, равномерно размещают n-датчиков давления по всей конструкции грузового отсека летательного аппарата, осуществляют загрузку груза в грузовой отсек летательного аппарата, определяют среднюю массу груза в грузовом отсеке летательного аппарата, определяют равномерность размещения груза на основе сравнения отношений масс между средним и текущим значениями массы груза в контрольных точках грузового отсека летательного аппарата, осуществляют с учетом данной информации равномерное размещение груза в контрольных точках грузового отсека летательного аппарата [1].
Недостатком известного способа является невозможность определения массы летательного аппарата в движении, а также отсутствие информации для лица, принимающего решение о взлете летательного аппарата с превышением веса летательного аппарата критической величины.
Наиболее близким к изобретению является способ повышения точности при взвешивании автотранспортного средства в движении [2] с помощью по меньшей мере одной группы датчиков для поколесного или поосного взвешивания автотранспортного средства, размещенной на трассе, заключающийся в том, что размещают на трассе по меньшей мере одну дополнительную группу датчиков для поколесного или поосного взвешивания автотранспортного средства на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого автотранспортного средства, запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой трассе в любой паре упомянутых групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в упомянутой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей упомянутого конкретного автотранспортного средства, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков, находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства, и принимают их в качестве результирующих показаний веса данного колеса или оси, вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего автотранспортного средства.
Недостатком способа является недостаточная информативность, заключающаяся в отсутствии информации о типе взвешиваемого транспортного средства, его бортовом номере, превышении веса транспортного средства критической величины, наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения корпуса транспортного средства.
Технической задачей изобретения является расширение функциональных возможностей способа за счет получения дополнительной информации о типе взвешиваемого транспортного средства, его бортовом номере, превышении веса транспортного средства критической величины, наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенении корпуса транспортного средства.
Решение технической задачи изобретения достигается тем, что в способе автоматизированного предполетного контроля летательного аппарата, заключающемся в том, что размещают на рулежной дорожке по меньшей мере одну дополнительную группу датчиков для поколесного взвешивания летательного аппарата на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого летательного аппарата, запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой рулежной дорожке в любой паре упомянутых групп датчиков, при проезде по ней каждого из колес конкретного летательного аппарата, запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в упомянутой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей упомянутого конкретного летательного аппарата, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков; находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства, и принимают их в качестве результирующих показаний веса данного колеса или оси; вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного летательного аппарата, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего летательного аппарата, дополнительно распознают бортовой номер летательного аппарата, по номеру летательного аппарата определяют его тип, сравнивают вес взвешенного летательного аппарата с критическим весом для данного типа летательного аппарата, при превышении веса летательного аппарата критического веса информируют об этом лицо, принимающее решение о взлете летательного аппарата, осматривают в автоматизированном режиме летательный аппарат на предмет наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата, при обнаружении не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата информируют об этом лицо, принимающее решение о взлете летательного аппарата.
Кроме того, каждая из упомянутых групп датчиков включает в себя по меньшей мере два датчика для поколесного взвешивания летательного аппарата, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого летательного аппарата.
Кроме того, принимают в качестве упомянутых измерительных показаний датчиков данной группы усредненные показания всех входящих в нее датчиков.
Кроме того, принимают в качестве упомянутых измерительных показаний каждого из датчиков данной группы показания соответствующего из датчиков этой группы при проезде по ней каждого из колес конкретного летательного аппарата, измеренные относительно показаний датчиков другой группы в упомянутой паре групп датчиков, измеренных в тот же момент времени.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. Распознают бортовой номер летательного аппарата, по номеру летательного аппарата определяют его тип.
2. Сравнивают вес взвешенного летательного аппарата с критическим весом для данного типа летательного аппарата, при превышении веса летательного аппарата критической величины информируют об этом лицо, принимающее решение о взлете летательного аппарата.
3. Осматривают в автоматизированном режиме летательный аппарат на предмет наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата.
4. При обнаружении не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата информируют об этом лицо, принимающее решение о взлете летательного аппарата.
Заявляемый способ является результатом научно-исследовательской и экспериментальной работы.
На фиг.1 приведена функциональная схема устройства, реализующего заявленный способ.
Способ по настоящему способу может быть реализован в устройстве, в котором на рулежной дорожке 1 (условно показанной однополосной с направлением движения по стрелке 2) установлены две группы 3 и 4 датчиков, имеющие каждая по два датчика (взвешивающих устройства). На рисунке датчики первой группы 3 имеют ссылочные позиции 31 и 32, а датчики второй группы 4 имеют ссылочные позиции 41 и 42, причем датчики 31 и 41 являются первыми в соответствующей из групп 3 и 4 при отсчете в направлении 2 движения.
Группы 3 и 4 датчиков размещены на рулежной дорожке 1 на расстоянии R одна от другой по направлению движения, причем расстояние R не менее максимально возможной длины взвешиваемого летательного аппарата. К примеру, это расстояние R может превышать 25 м для рулежных дорожек, на которых разрешен проезд широкофюзеляжных летательных аппаратов.
Датчики 31 и 32 в первой группе 3 и датчики 41 и 42 во второй группе 4 размещены на рулежной дорожке на расстоянии L один от другого по направлению движения, причем расстояние L меньше минимально возможной длины взвешиваемого летательного аппарата. Например, это расстояние L может быть меньше 5 м.
Датчики (взвешивающие устройства) 31, 32, 41, 42, как правило, укладываются в дорожное полотно рулежной дорожки 1 в каждой полосе движения поперек направления 2 движения летательных аппаратов.
Перед каждым из датчиков 31, 32, 41, 42 может быть размещена индукционная петля 5. В принципе, такие индукционные петли 5 могут устанавливаться только перед первыми по направлению движения датчиками в каждой группе (т.е. перед датчиками 31 и 41). Каждая индукционная петля 5 служит для индикации наезда летательного аппарата на расположенный за ней датчик. Сигналы со всех датчиков обеих групп 3 и 4 и со всех индукционных петель 5 поступают в вычислительный блок 6.
Вблизи каждой из групп 3 и 4 датчиков установлены первое и второе считывающие средства 7 и 8. Каждое считывающее средство выполнено с возможностью считывать по меньшей мере одну из идентификационных меток летательного аппарата, например его бортовой номер. Такими идентификационными метками могут быть также радиоидентификационные метки (радиоидентификаторы, RFID), закрепляемые на летательных аппаратах. Помимо бортового номера первое считывающее средство 7 передает изображение летательного аппарата в вычислительный блок 6, где по бортовому номеру определяется тип летательного аппарата, а также осуществляется первичная обработка его изображения на предмет наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата. Второе считывающее средство 8 осуществляет вторичную передачу изображения летательного аппарата в вычислительный блок 6, где оно обрабатывается и с учетом первичного изображения принимается окончательное решение о наличии не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата. При обнаружении не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата в вычислительном блоке 6 формируется сигнал тревоги, который доводится до лица, принимающего решение о взлете летательного аппарата.
При этом считывающее средство представляет собой, например, видеокамеру и (или) считыватель (ридер), выполнение которого позволяет считывать идентификационные метки соответствующего типа. При проезде летательного аппарата через первую в паре группу 3 датчиков расположенное рядом считывающее средство одновременно осуществляет фиксацию времени считывания.
Вычислительный блок 6 осуществляет необходимую обработку данных. Для этого вычислительный блок 6 может содержать соответственно запрограммированное процессорное средство (компьютер, процессор, контроллер и т.п.) и память для хранения данных, принятых от датчиков 31, 32, 41, 42, индукционных петель 5, а также от считывающих средств 7 и 8, и для хранения результирующих данных, полученных в результате обработки принятых данных.
При проезде летательного аппарата через группу 3 датчиков, расположенную первой в паре групп 3 и 4 датчиков на трассе 1, датчики 31, 32 этой группы 3 формируют сигналы, пропорциональные весу каждого колеса проезжающего летательного аппарата. Показания каждого из датчиков группы 3 при проезде по этой группе датчиков каждого из колес летательного аппарата запоминают в вычислительном блоке 6 в качестве первых измерительных показаний для данного аппарата. Точно так же показания каждого из датчиков группы 4 датчиков, расположенной вслед за группой 3 датчиков по направлению 2 движения, при проезде по этой группе датчиков каждого из колес того же самого летательного аппарата запоминают в вычислительном блоке 6 в качестве вторых измерительных показаний для этого аппарата. Затем в вычислительном блоке 6 определяют вес летательного аппарата и сравнивают его с критическим весом для данного типа летательного аппарата, при превышении веса летательного аппарата критического веса информируют об этом лицо, принимающее решение о взлете летательного аппарата.
Применение предлагаемого способа позволяет повысить безопасность полетов летательных аппаратов.
Источники информации
1. Патент РФ на изобретение №2466360, кл. G01G 19/07, 20.08.2012 г.
2. Патент РФ на изобретение №2494355, кл. G01G 19/00, 27.09.2013 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502058C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУГАСНОГО ДЕЙСТВИЯ ОБЪЕКТА ИСПЫТАНИЙ | 2013 |
|
RU2519614C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2465558C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕПЛОВОГО ДЕЙСТВИЯ ОБЪЕКТА ИСПЫТАНИЙ | 2014 |
|
RU2563705C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА ЗАГРУЗКИ, КОНТРОЛЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ПЕРЕД ВЫЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466360C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ОБЪЕКТ | 2007 |
|
RU2348943C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ВЗВЕШИВАНИИ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2012 |
|
RU2494355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМ КОЛЕБАНИЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269100C2 |
Способ автоматизированного предполетного контроля летательного аппарата (ЛА). Для поколесного взвешивания ЛА на рулежной дорожке размещают две группы датчиков на расстоянии не менее максимально возможной его длины. Каждая группа датчиков содержит не менее двух датчиков, разнесенных по направлению движения на расстояние менее минимальной длины ЛА. Производят измерения в один и тот же момент времени и для тех датчиков каждой группы, по которым проезжает колесо ЛА. Для каждой группы датчиков вычисляют усредненные показания всех датчиков группы. Вычисляют коэффициенты для коррекции показаний при взвешивании следующего летательного аппарата. Определяют по номеру летательного аппарата его тип и значение его критической массы для этого типа. Осматривают в автоматизированном режиме внешний вид летательного аппарата. При превышении критической массы летательного аппарата или наличии не снятых заглушек, не закрытых лючков, течи топлива или жидкостей, обледенения поверхностей информируют лицо, принимающее решение о взлете. Обеспечивается повышение безопасности полетов ЛА. 3 з.п. ф-лы, 1 ил.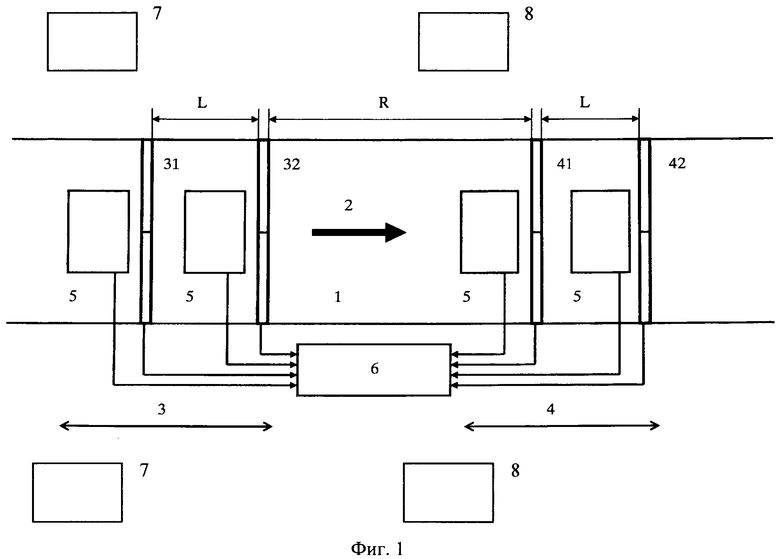
1. Способ автоматизированного предполетного контроля летательного аппарата, заключающийся в том, что размещают на рулежной дорожке по меньшей мере одну дополнительную группу датчиков для поколесного взвешивания летательного аппарата на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого летательного аппарата; запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой рулежной дорожке в любой паре упомянутых групп датчиков, при проезде по ней каждого из колес конкретного летательного аппарата; запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в упомянутой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей упомянутого конкретного летательного аппарата, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков; находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства, и принимают их в качестве результирующих показаний веса данного колеса или оси; вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного летательного аппарата, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего летательного аппарата, отличающийся тем, что распознают бортовой номер летательного аппарата, по номеру летательного аппарата определяют его тип, сравнивают вес взвешенного летательного аппарата с критическим весом для данного типа летательного аппарата, при превышении веса летательного аппарата критической величины информируют об этом лицо, принимающее решение о взлете летательного аппарата, осматривают в автоматизированном режиме летательный аппарат на предмет наличия не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата, при обнаружении не закрытых лючков, не снятых заглушек, течи топлива или других жидкостей, обледенения планера летательного аппарата информируют об этом лицо, принимающее решение о взлете летательного аппарата.
2. Способ по п. 1, в котором каждая из упомянутых групп датчиков включает в себя по меньшей мере два датчика для поколесного взвешивания летательного аппарата, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого летательного аппарата.
3. Способ по п. 1 или 2, в котором принимают в качестве упомянутых измерительных показаний датчиков данной группы усредненные показания всех входящих в нее датчиков.
4. Способ по п. 1, в котором принимают в качестве упомянутых измерительных показаний каждого из датчиков данной группы показания соответствующего из датчиков этой группы при проезде по ней каждого из колес конкретного летательного аппарата, измеренные относительно показаний датчиков другой группы в упомянутой паре групп датчиков, измеренных в тот же момент времени.
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА ЗАГРУЗКИ, КОНТРОЛЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА ПЕРЕД ВЫЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466360C2 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ВЗВЕШИВАНИИ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2012 |
|
RU2494355C1 |
| RU 2010107337 A, 27.09.2011 | |||
| 0 |
|
SU153111A1 | |
| Способ изготовления щелочных стаканчиковых элементов | 1959 |
|
SU133082A1 |

