Изобретение относится к информационным системам управления техническим состоянием (ИСУ ТС), а именно, к системам управления техническим состоянием конструкции планера и шасси летательного аппарата, и может быть использовано в различных транспортных средствах (самолетах, вертолетах, беспилотных летательных аппаратах и др.).
Известен способ контроля состояния конструкции летательного аппарата [1], заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состоянии каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состояния шин летательного аппарата и возникновении неисправности в период его взлета или посадки.
Известно устройство для осуществления способа контроля состояния конструкции летательного аппарата [1], содержащее установленные на борту летательного аппарата первое устройство обнаружения, устройство сбора информации, бортовое устройство, блок сигнализации аварийного состояния, блок питания, первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 мс при каждом акустическом событии, определяемом величиной верхнего и нижнего порогов, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора информации, выход бортового устройства соединен с входом первого устройства обнаружения, второй выход блока питания соединен со вторым входом блока сигнализации аварийного состояния, первый выход блока питания соединен с входом бортового устройства, второе устройство обнаружения содержащее элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, причем первый, второй и третий входы второго устройства обнаружения являются первым, вторым входами элемента И, входом элемента НЕ, выход которого соединен с третьим входом элемента И, выход которого соединен со вторыми входами n микрорадаров, выходы n аналого-цифровых преобразователей являются выходами второго устройства обнаружения, блок датчиков, индикатор тревоги, причем первый, второй и третий входы второго устройства обнаружения соединены соответственно с первым, вторым и третьим выходами блока датчиков, выходы второго устройства обнаружения соединены с группой третьих входов устройства сбора информации, второй выход которого соединен с выходом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера. При этом, устройство сбора информации дополнительно определяет параметры состояния шины в соответствии с алгоритмом анализа выбранных гармоник сигналов, отраженных от облученной шины, заключающемся в осуществлении выбора диапазона гармоник отраженных сигналов на основе оценки усредненной энергии гармоник, оценки центра массы распределения гармоник и определения параметров, связанных с шиной: балансировка и юстировка - в диапазоне от 1-й до 2-й гармоники, расслоение ленты протектора и неравномерный износ протектора - в диапазоне от 3-й до n гармоники, где n - фундаментальная гармоника, связанная с шаблоном протектора, износ протектора - в диапазоне от n-й до m-й гармоники, где m является верхним обертоном энергии шаблона протектора.
Недостатком известных способа и устройства является их недостаточная информативность из-за отсутствия мониторинга величин давления и температуры шин шасси летательного аппарата в процессе его движения по аэродрому, взлета и посадки, а также величин пробега каждой шины и количества совершенных шиной взлетов-посадок, мониторинга технического состояния других жизненно-важных элементов шасси, прогнозирования их отказов, оперативного информирования экипажа о возможности взлета или посадки при текущем техническом состоянии планера и шасси летательного аппарата.
Известен способ контроля состояния конструкции летательного аппарата [2], заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мкс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата измеряют температуру и давление в каждой шине шасси, сравнивают текущие величины давления и температуры в каждой шине с заданной величиной, сравнивают текущие величины давления и температуры в m сдвоенных (строенных) шинах стоек шасси между собой, записывают информацию о давлении и температуре в каждой шине в защищенный бортовой накопитель информации, при разнице величин давления или температуры в каждой из шин и в m сдвоенных (строенных) шинах на величину, более заданной, обеспечивают информирование об этом экипажа (оператора) летательного аппарата.
Известно устройство контроля состояния конструкции летательного аппарата [2], содержащее установленные на борту летательного аппарата первое устройство обнаружения, устройство сбора информации, бортовое устройство, блок сигнализации аварийного состояния, блок питания, первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 мкс при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора информации, выход бортового устройства соединен с входом первого устройства обнаружения, второй выход блока питания соединен со вторым входом блока сигнализации аварийного состояния, первый выход блока питания соединен с входом бортового устройства, второе устройство обнаружения, блок датчиков, индикатор тревоги, причем первый, второй и третий входы второго устройства обнаружения соединены соответственно с первым, вторым и третьим выходами блока датчиков, выходы второго устройства обнаружения соединены с группой третьих входов устройства сбора информации, первый выход которого соединен с входом бортового накопителя информации, а второй выход - со входом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера, второе устройство обнаружения содержит элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, причем первый, второй и третий входы второго устройства обнаружения являются первым, вторым входами элемента И, входом элемента НЕ, выход которого соединен с третьим входом элемента И, выход которого соединен со вторыми входами n микрорадаров, выходы n аналого-цифровых преобразователей являются выходами второго устройства обнаружения, блок датчиков содержит k информационных датчиков, по одному на каждое колесо шасси, соединенных по радиоканалу с блоком приемников, блок приемников, содержащий по одному приемнику на каждую стойку шасси летательного аппарата, вход блока приемников соединен с выходом элемента И, группа выходов блока приемников соединена с четвертой группой входов устройства сбора информации, задатчик постоянных величин, выход которого соединен с пятым входом устройства сбора информации.
Недостатком известных способа и устройства является их недостаточная информативность из-за отсутствия мониторинга величин пробега шин колес шасси летательного аппарата в процессе их эксплуатации, а также количества взлетов-посадок, приходящихся на каждую шину колес шасси, а также мониторинга технического состояния других жизненно-важных элементов шасси, прогнозирования их отказов, оперативного информирования экипажа о возможности взлета или посадки при текущем техническом состоянии планера и шасси летательного аппарата.
Наиболее близким к изобретению является способ контроля состояния конструкции летательного аппарата [3], заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мкс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, измеряют температуру и давление в каждой шине шасси, сравнивают текущие величины давления и температуры в каждой шине с заданной величиной, сравнивают текущие величины давления и температуры в m сдвоенных (строенных) шинах стоек шасси между собой, записывают информацию о давлении и температуре в каждой шине в защищенный бортовой накопитель информации, при разнице величин давления или температуры в каждой из шин и в m сдвоенных (строенных) шинах на величину, более заданной, обеспечивают информирование об этом экипажа (оператора) летательного аппарата, измеряют во время взлета и посадки летательного аппарата число оборотов колес основных стоек шасси, определяют пробег каждой шины колеса шасси летательного аппарата за период текущего взлета-посадки, суммируют данный пробег с уже имеющимся, определяют пробег каждой шины с начала эксплуатации, фиксируют текущую взлет-посадку, суммируют последнюю взлет-посадку каждой шины с уже имеющимися, определяют для каждой шины количество взлетов-посадок с начала эксплуатации, записывают информацию о количестве взлетов-посадок для каждой шины и ее пробег с начала эксплуатации в бортовой накопитель информации, при превышении количества взлетов-посадок и (или) пробега какой-либо из шин заданных величин осуществляют информирование об этом экипажа (оператора) летательного аппарата.
Наиболее близким к изобретению является устройство для осуществления способа контроля состояния конструкции летательного аппарата [3] содержащее установленные на борту летательного аппарата первое и второе устройства обнаружения, устройство сбора информации, блок сигнализации аварийного состояния, бортовое устройство, блок питания, индикатор тревоги, задатчик постоянных величин, при этом первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 мкс при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора информации, выход бортового устройства соединен с входом первого устройства обнаружения, первый, второй и третий выходы блока питания соединены соответственно со вторым входом блока сигнализации аварийного состояния, с входами бортового устройства и задатчика постоянных величин, первый, второй, третий и четвертые входы второго устройства обнаружения соединены соответственно с первым, вторым, третьим и четвертым выходами блока датчиков, группа первых выходов, второй и третий выходы второго устройства обнаружения соединены соответственно с группой третьих входов, четвертых входов устройства сбора информации, первый выход которого соединен с входом бортового накопителя информации, а второй выход - с первым входом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера, к информационных датчиков, по одному на каждое колесо шасси, при этом выходы концевых выключателей, датчика движения, высотомера и к информационных датчиков, являются соответственно первым, вторым, третьим и четвертым выходами блока датчиков, группа выходов задатчика постоянных величин соединена с пятой группой входов устройства сбора информации, второе устройство обнаружения содержит элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, а также блок приемников, причем первый, второй, третий и четвертый входы второго устройства обнаружения являются первым, вторым входами первого элемента И, входом элемента НЕ и первой группой входов блока приемников, второй вход которого соединен с выходом первого элемента И, выход элемента НЕ соединен с третьим входом первого элемента И, выход которого соединен со вторыми входами n микрорадаров, блок приемников содержит по одному приемнику на каждую стойку шасси летательного аппарата, группа выходов n аналого-цифровых преобразователей и группа выходов блока приемников являются соответственно первой и второй группой выходов второго устройства обнаружения, которые соединены с соответственно с третьей и четвертой группой входов устройства сбора информации, дополнительно введены в блок датчиков датчики числа оборотов, а во второе устройство обнаружения введены второй и третий элементы И, первый и второй счетчики, дифференцирующая цепь, причем датчики числа оборотов установлены относительно колес основных стоек шасси летательного аппарата, выходы датчиков числа оборотов, которые являются пятым выходом блока датчиков, соединены с пятыми входами второго устройства обнаружения, пятый вход которого является вторыми входами второго и третьего элементов И, первые входы которых соединены соответственно с выходом первого элемента И и выходом блока концевых выключателей шасси летательного аппарата, выходы второго и третьего элементов И соединены с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, вход которой соединен с выходом датчика движения, выходы первого и второго счетчиков являются соответственно третьим и четвертым выходами второго устройства обнаружения, которые соединены с шестым и седьмым входами устройства сбора информации, третий выход которого соединен со вторым входом индикатора тревоги.
Недостатком известных способа и устройства является их недостаточная информативность из-за отсутствия мониторинга технического состояния, помимо пневматиков шасси, других жизненно-важных элементов шасси, прогнозирования их отказов, оперативного информирования экипажа о возможности взлета или посадки при текущем техническом состоянии планера и шасси летательного аппарата.
Технической задачей изобретения является повышение информативности способа и устройства за счет мониторинга помимо шин других жизненно-важных элементов шасси, прогнозирования их отказов, оперативного информирования экипажа о возможности взлета и посадки при текущем техническом состоянии планера и шасси летательного аппарата и, следовательно, повышение безопасности полетов.
Решение технической задачи изобретения достигается тем, что в способе контроля состояния конструкции летательного аппарата, заключающемся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мкс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, измеряют температуру и давление в каждой шине шасси, сравнивают текущие величины давления и температуры в каждой шине с заданной величиной, сравнивают текущие величины давления и температуры в m сдвоенных (строенных) шинах стоек шасси между собой, записывают информацию о давлении и температуре в каждой шине в защищенный бортовой накопитель информации, при разнице величин давления или температуры в каждой из шин и в m сдвоенных (строенных) шинах на величину, более заданной, обеспечивают информирование об этом экипажа (оператора) летательного аппарата, измеряют во время взлета и посадки летательного аппарата число оборотов колес основных стоек шасси, определяют пробег каждой шины колеса шасси летательного аппарата за период текущего взлета-посадки, суммируют данный пробег с уже имеющимся, определяют пробег каждой шины с начала эксплуатации, фиксируют текущую взлет-посадку, суммируют последнюю взлет-посадку каждой шины с уже имеющимися, определяют для каждой шины количество взлетов-посадок с начала эксплуатации, записывают информацию о количестве взлетов-посадок для каждой шины и ее пробег с начала эксплуатации в бортовой накопитель информации, при превышении количества взлетов-посадок и (или) пробега какой-либо из шин заданных величин осуществляют информирование об этом экипажа (оператора) летательного аппарата, дополнительно устанавливают и настраивают датчики, измеряющие различные рабочие характеристики систем шасси, включая продольную (направление x), поперечную (направление y) и вертикальную (направление z) нагрузку (FxN, FyN, FzN, FxM, FyM, FzM), угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза, определяют реальную взлетную (посадочную) массу и положение центра тяжести летательного аппарата, определяют с помощью бортовых измерительных систем текущие параметры движения летательного аппарата и окружающей среды, определяют с помощью с помощью аэродромных служб и руководящих документов параметры взлетно-посадочной полосы (ВПП), летательного аппарата, погодных условий, определяют текущие параметры взаимодействия летательного аппарата с ВПП, определяют эффективную взлетную (посадочную) массу летательного аппарата, сравнивают величину эффективной взлетной (посадочной) массы летательного аппарата с величиной реальной взлетной (посадочной) массой летательного аппарата, по величине расхождения между величинами эффективной взлетной (посадочной) массы летательного аппарата и реальной взлетной (посадочной) массы летательного аппарата определяют целесообразность продолжения взлета (посадки) летательного аппарата, информируют о целесообразности продолжения взлета (посадки) экипаж летательного аппарата, анализируют после завершения полета показания датчиков систем шасси на предмет наличия отказов и отклонения от заданных параметров, осуществляют замену отказавших элементов и датчиков, их настройку и регулировку.
Решение технической задачи изобретения достигается тем, что в устройстве для осуществления способа мониторинга технического состояния планера и шасси летательного аппарата, содержащем установленные на борту летательного аппарата первое и второе устройства обнаружения, устройство сбора и обработки информации, блок сигнализации аварийного состояния, бортовое устройство, блок питания, индикатор тревоги, задатчик постоянных величин, при этом первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 мкс при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора и обработки информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора и обработки информации, выход бортового устройства соединен с входом первого устройства обнаружения, первый, второй и третий выходы блока питания соединены соответственно со вторым входом блока сигнализации аварийного состояния, с входами бортового устройства и задатчика постоянных величин, первый, второй, третий и четвертые входы второго устройства обнаружения соединены соответственно с первым, вторым, третьим и четвертым выходами блока датчиков, группа первых выходов, второй и третий выходы второго устройства обнаружения соединены соответственно с группой третьих входов, четвертых входов устройства сбора и обработки информации, первый выход которого соединен с входом бортового накопителя информации, а второй выход - с первым входом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера, к информационных датчиков, по одному на каждое колесо шасси, при этом выходы концевых выключателей, датчика движения, высотомера и к информационных датчиков, являются соответственно первым, вторым, третьим и четвертым выходами блока датчиков, группа выходов первого задатчика постоянных величин соединена с пятой группой входов устройства сбора информации, второе устройство обнаружения содержит элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, а также блок приемников, причем первый, второй, третий и четвертый входы второго устройства обнаружения являются первым, вторым входами первого элемента И, входом элемента НЕ и первой группой входов блока приемников, второй вход которого соединен с выходом первого элемента И, выход элемента НЕ соединен с третьим входом первого элемента И, выход которого соединен со вторыми входами n микрорадаров, блок приемников содержит по одному приемнику на каждую стойку шасси летательного аппарата, группа выходов n аналого-цифровых преобразователей и группа выходов блока приемников являются соответственно первой и второй группой выходов второго устройства обнаружения, которые соединены с соответственно с третьей и четвертой группой входов устройства сбора и обработки информации, во второе устройство обнаружения введены второй и третий элементы И, первый и второй счетчики, дифференцирующая цепь, причем датчики числа оборотов установлены относительно колес основных стоек шасси летательного аппарата, выходы датчиков числа оборотов, которые являются пятым выходом блока датчиков, соединены с пятыми входами второго устройства обнаружения, пятый вход которого является вторыми входами второго и третьего элементов И, первые входы которых соединены соответственно с выходом первого элемента И и выходом блока концевых выключателей шасси летательного аппарата, выходы второго и третьего элементов И соединены с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, вход которой соединен с выходом датчика движения, выходы первого и второго счетчиков являются соответственно третьим и четвертым выходами второго устройства обнаружения, которые соединены с шестым и седьмым входами устройства сбора и обработки информации, третий выход которого соединен со вторым входом индикатора тревоги, дополнительно введены блок определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, третье устройство обнаружения, состоящее из r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузку носового (FxN, FyN, FzN) и основных FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза, второй задатчик постоянных величин, com-порт, блок определения параметров взаимодействия летательного аппарата с ВПП, причем второй выход датчиков числа оборотов колес шасси соединен со вторым входом третьего устройства обнаружения, выход второго устройства обнаружения соединен со вторым входом блока определения параметров взаимодействия летательного аппарата с ВПП, выход второго устройства обнаружения соединен с первым входом третьего устройства обнаружения, группа выходов третьего устройства обнаружения соединена с шестой группой входов устройства сбора и обработки информации, одиннадцатый вход устройства сбора и обработки информации соединен с группой выходов бортовых информационных систем летательного аппарата, третий вход индикатора тревоги соединен с выходом устройства сбора и обработки информации, первый выход второго задатчика постоянных величин соединен с входом блока определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, второй выход второго задатчика постоянных величин соединен с девятым входом устройства сбора и обработки информации, третий выход второго задатчика постоянных величин соединен с первым входом блока определения параметров взаимодействия летательного аппарата с ВПП, выход блока определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата соединен с восьмым входом устройства сбора и обработки информации, выход блока определения параметров взаимодействия летательного аппарата с ВПП соединен с десятым входом устройства сбора и обработки информации, первый выход устройства сбора и обработки информации соединен с входом com-порта. При этом, третье устройство обнаружения содержит r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузку носового (FxN, FyN, FzN) и основных FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW), r усилителей сигнала, r четвертых элементов И, причем выходы r датчиков соединены с r входами усилителей сигнала, выходы которых соединены с первыми входами четвертых элементов И, вторые входы которых соединены с группой выходов второго устройства обнаружения, выходы r четвертых элементов И являются группой выходов третьего устройства обнаружения.
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. Устанавливают и настраивают датчики, измеряющие различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузку (FxN, FyN, FzN,) носового и основных (FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза.
2. Определяют реальную взлетную (посадочную) массу и положение центра тяжести летательного аппарата.
3. Определяют с помощью бортовых измерительных систем текущие параметры движения летательного аппарата и окружающей среды.
4. Определяют с помощью с помощью аэродромных служб и руководящих документов параметры взлетно-посадочной полосы (ВПП), летательного аппарата, погодных условий.
5. Определяют текущие параметры взаимодействия летательного аппарата с ВПП.
6. Определяют эффективную взлетную (посадочную) массу летательного аппарата, сравнивают величину эффективной взлетной (посадочной) массы летательного аппарата с величиной реальной взлетной (посадочной) массой летательного аппарата, по величине расхождения между величинами эффективной взлетной (посадочной) массы летательного аппарата и реальной взлетной (посадочной) массы летательного аппарата определяют целесообразность продолжения взлета (посадки) летательного аппарата.
7. Информируют о целесообразности продолжения взлета (посадки) экипаж летательного аппарата.
8. Анализируют, после завершения полета, показания датчиков систем летательного аппарата на предмет наличия отказов и отклонений от заданных параметров, осуществляют замену отказавших элементов и датчиков, их настройку и регулировку.
Новыми элементами, обладающими существенными отличиями по устройству являются блок определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, третье устройство обнаружения, состоящее из r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузку носового (FxN, FyN, FzN) и основных FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза, второй задатчик постоянных величин, com-порт, блок определения параметров взаимодействия летательного аппарата с ВПП, а также связи между новыми и известными элементами устройства.
Заявляемые способ и устройство являются результатом научно-исследовательской и экспериментальной работы.
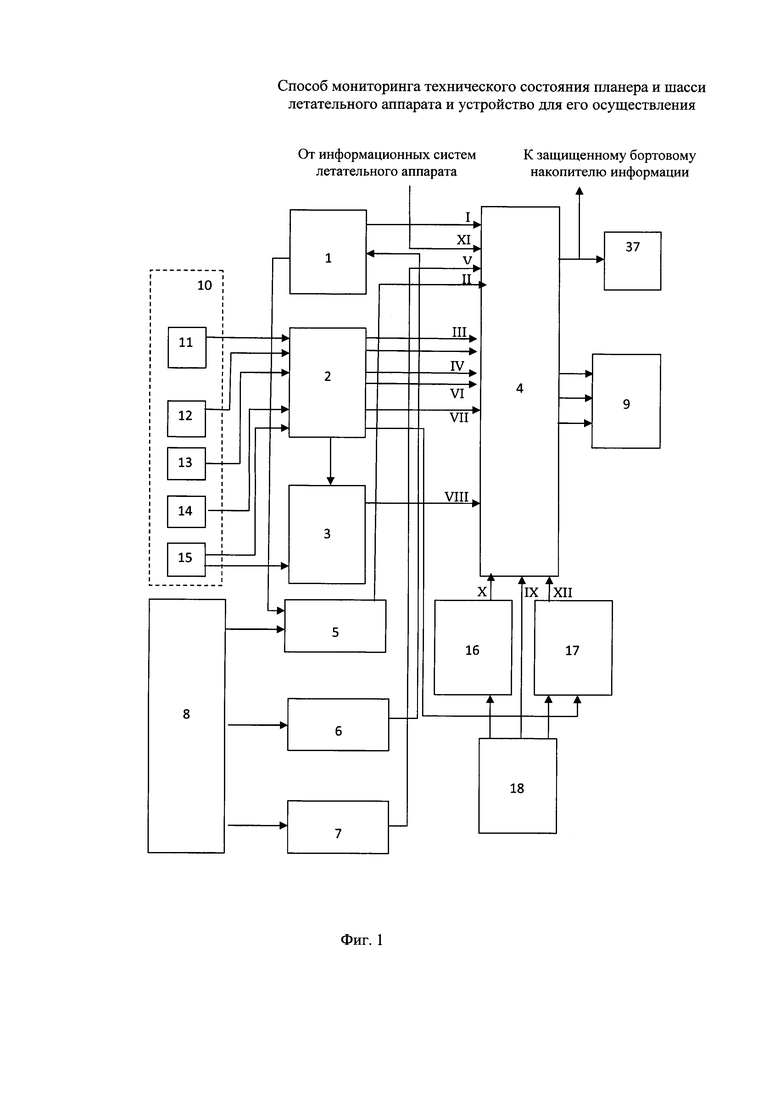
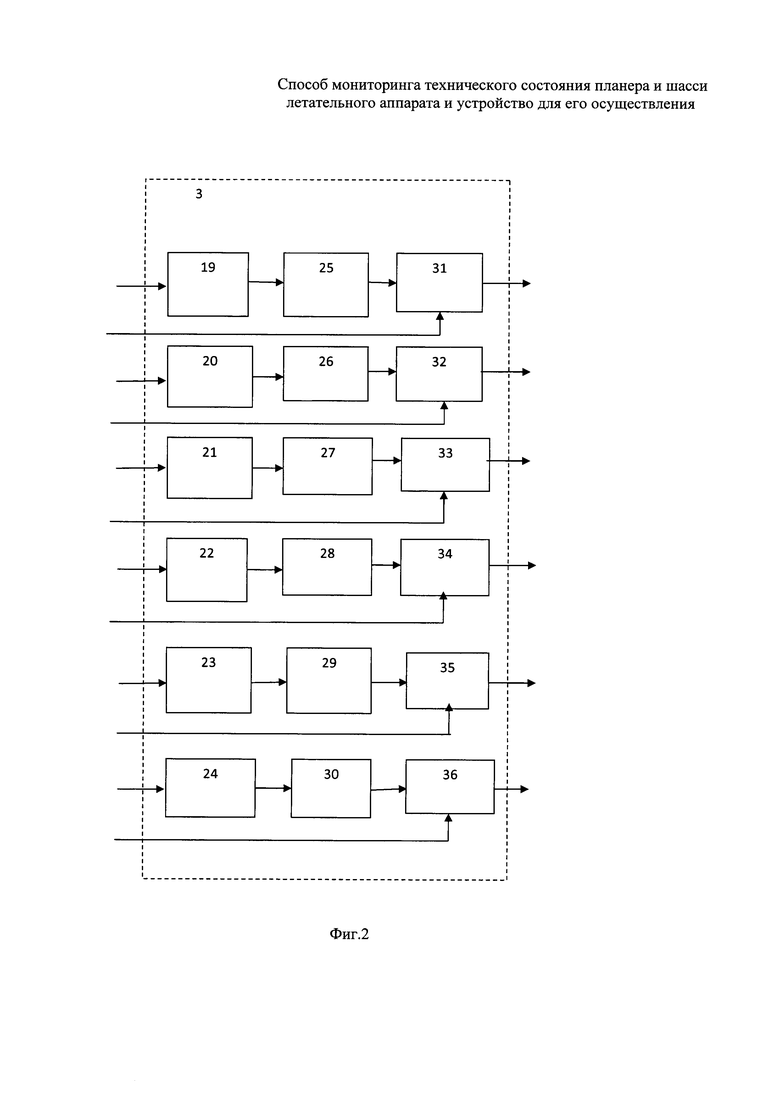
На фиг. 1 приведена функциональная схема устройства, на фиг. 2 - функциональная схема третьего устройства обнаружения.
Устройство содержит установленные на борту летательного аппарата первое 1, второе 2 и третье 3 устройство обнаружения, устройство 4 сбора и обработки информации, блок 5 сигнализации аварийного состояния, бортовое устройство 6, блок 8 питания, блок 10 датчиков, индикатор 9 тревоги, первый задатчик 7 постоянных величин, второй задатчик 18 постоянных величин, блок 16 определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, блок 17 определения параметров взаимодействия летательного аппарата с ВПП, com-порт 37.
Блок 10 датчиков состоит из блока 11 концевых выключателей шасси летательного аппарата, датчика 12 движения, высотомера 13, информационных датчиков 14 (по одному на каждое колесо шасси), датчиков 15 числа оборотов колес шасси.
Третье устройство 3 обнаружения содержит r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая датчики 19 продольной (направление x), поперечной (направление y) и вертикальной (направление z) нагрузки носового (FxN, FyN, FzN) и датчики 20 основных (FxM, FyM, FzM) колес шасси, датчик 21 угла поворота носового колеса (θNW), датчики 22 тормозного момента (TW) каждого тормозного колеса, датчики 23 тормозного давления (PW) и датчики 24 температуры (TeW), r усилителей (25-30) сигнала, r четвертых элементов И (31-36), причем выходы r датчиков соединены с r входами усилителей сигнала, выходы которых соединены с первыми входами четвертых элементов И, вторые входы которых соединены с группой выходов второго устройства обнаружения, выходы r четвертых элементов И являются группой выходов третьего устройства обнаружения.
Способ мониторинга технического состояния планера и шасси летательного аппарата реализуется следующим образом.
Летательные аппараты оборудуются системой мониторинга планера и шасси, осуществляемого на протяжении всего полезного срока их службы. Как правило, этот полезный срок службы включает в себя фазы полета и фазы стоянок в аэропорту или в техническом ангаре. Система мониторинга является электронной системой с питанием от бортовой сети. Постоянное электрическое питание, поддерживаемое во время фаз стоянок, позволяет произвести исследования по всем событиям, произошедшим с летательным аппаратом.
После загрузки летательного аппарата (грузами, людьми и т.д.) и запуска двигателей (появления питания в системе мониторинга) с помощью блока 16 определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата определяется реальная взлетная масса летательного аппарата и положение его центра тяжести. Блок 16 определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата известен [4].
При ударах или столкновениях, а также больших усилиях, которым подвергается конструкция планера летательного аппарата, в местах ударов или столкновений или в зоне напряжения происходит излучение звуковой волны. Поэтому в чувствительных местах упомянутых критических частей (узлов) устанавливаются наборы пьезоэлектрических датчиков. Эти датчики соединены с электронной системой и выдают на нее сигнал сразу при возникновении какого-либо события.
При применении способа мониторинга технического состояния планера и шасси измеряют мощные импульсы механических волн, спектральные составляющие которых на практике находятся в пределах от 20 кГц до 2 МГц. Акустическая схема позволяет анализировать в режиме реального времени характеристики импульсов (высокочастотных сигналов) во временной области. Можно также предусмотреть анализ их частотных характеристик. Она позволяет также локализовать акустические источники по зоне или ячейке, распознавать и классифицировать акустические источники в реальном времени и автоматически фильтровать и сохранять в памяти акустические импульсы в зависимости от их характеристик и выделять из них данные, характерные для определенного явления.
Пьезоэлектрические датчики устанавливают в зонах, включающих: купол радиолокационной антенны; передние кромки крыльев и хвостового оперения летательного аппарата.
При этом первое 1 устройство обнаружения, состоящее из множества пьезоэлектрических датчиков, обеспечивает непрерывный мониторинг каждой зоны летательного аппарата и измерение сигнала в течение около 100 микросекунд при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, при этом величина упомянутого порога изменяется в зависимости от того, находится самолет в полете или на стоянке.
Сигналы с первого и второго выхода первого 1 устройства обнаружения поступают соответственно на первые и вторые входы устройства 4 сбора и обработки информации непосредственно и через блок 6 сигнализации аварийного состояния.
При этом устройство 4 сбора и обработки информации считывает и обрабатывает сигналы, поступающие от пьезоэлектрических датчиков во время полезного срока службы летательного аппарата на земле и в воздухе, подтверждает исправную работу совокупности пьезоэлектрических датчиков, а также подает сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования.
Бортовое устройство 6 обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, при этом сигнал с выхода бортового устройства поступает на вход первого устройства обнаружения.
Для обеспечения постоянного питания системы мониторинга осуществляют постоянный контроль подачи электрической энергии и, в случае необходимости, подключают аварийную батарею, при этом напряжение питания с первого, второго и третьего выходов блока 8 питания поступает соответственно на второй вход блока 5 сигнализации аварийного состояния, на вход бортового устройства 6 и вход первого задатчика 7 постоянных величин.
Шасси летательного аппарата являются неотъемлемой частью его конструкции. Наиболее уязвимым элементом, как показывает практика, являются шины колес современных шасси. Достаточно часто неисправности шин летательных аппаратов приводят к предпосылкам к летным происшествиям, авариям и катастрофам. Одной из причин такого положения вещей является отсутствие мониторинга технического состояния шин летательного аппарата в основные периоды их реального функционирования - движения по аэродрому, взлета и посадки летательного аппарата, а также отсутствие информирования экипажа (оператора) летательного аппарата о текущем техническом состояния его шин и возникновении неисправностей в периоды движения по аэродрому, взлета и посадки. В аналоге изобретения [1] предложено устройство, позволяющее устранить некоторую часть вышеуказанных недостатков. Для этого в периоды выруливания на ВПП и взлета летательного аппарата сигналы соответственно от блока 11 концевых выключателей шасси летательного аппарата, датчика 12 движения, высотомера 13, входящих в состав блока 10 датчиков, поступают на первый, второй и третий входы второго устройства обнаружения.
В режиме выруливания на ВПП и взлета летательного аппарата из блока 10 датчиков выдается определенная комбинация сигналов на первый, второй и третий входы второго устройства 2 обнаружения, чем обеспечивается излучение n микрорадаров в направлении шин колес шасси летательного аппарата. Отраженные от шин сигналы поступают на n-третьи входы устройства 4 сбора и обработки информации.
Устройство 4 сбора и обработки информации включает в себя: преобразователи акустического сигнала в аналоговый электрический сигнал, аналогоцифровые преобразователи (АЦП), супервизоры, микроконтроллеры, обеспечивающие сбор и передачу данных в запоминающее устройство, детектирование неисправностей системы и координирование своевременного считывания данных АЦП, поступающих в буферные запоминающие устройства и массовые запоминающие устройства (ЗУ) сверхбольшой емкости, позволяющие системе собирать большие количества данных, устройства диагностики, связанные с супервизорами и конфигурированные для постоянной загрузки, записи, считывания и обработки сигналов, поступающих от датчиков во время полезного срока службы летательного аппарата на земле и в воздухе, вывода данных на дисплей, конфигурацию и калибровку оборудования, включая пороговые значения параметров оборудования в зависимости от того, находится самолет в полете или на земле, времена релаксации после события, передачи данных в массовое ЗУ, а также для подтверждения исправной работы указанного множества датчиков системы мониторинга.
Устройство 4 сбора и обработки информации также обрабатывает поступающие сигналы по алгоритму, основанному на анализе выбранных гармоник отраженных сигналов от шин летательного аппарата и заключающемуся в осуществлении выбора диапазона гармоник отраженных сигналов на основе оценки усредненной энергии гармоник, оценки центра массы распределения гармоник и определения параметров, связанных с шиной, определении параметров или аномалий: балансировка и юстировка в диапазоне от 1-й до 2-й гармоники, расслоение ленты протектора и неравномерный износ протектора в диапазоне от 3-й до n-гармоники, где n-фундаментальная гармоника, связанная с шаблоном протектора, износ протектора определяется в диапазоне от n-й до m-й гармоники, где m является верхним обертоном энергии шаблона протектора.
В результате обработки сигналов устройство 4 сбора информации определяет текущее техническое состояние каждой шины колес шасси летательного аппарата, и информация об этом записывается в накопитель устройства 4 сбора и обработки информации, а также в защищенный бортовой накопитель информации. После взлета летательного аппарата и уборки шасси срабатывает блок 11 концевых выключателей, и n микрорадаров прекращают излучение. Перед посадкой летательного аппарата летчик (оператор) выпускает шасси. После выпуска шасси опять срабатывает блок 11 концевых выключателей шасси летательного аппарата, и при посадке летательного аппарата восстанавливается излучение n микрорадаров в направлении шин, которое продолжается до заруливания летательного аппарата на стоянку. После остановки самолета излучение n микрорадаров прекращается. Устройство 4 сбора и обработки информации в результате обработки поступившей информации определяет текущее техническое состояние каждой шины шасси летательного аппарата, и информация об этом вновь записывается в накопитель устройства 4 сбора и обработки информации, а также в защищенный бортовой накопитель информации. При этом, наряду с мониторингом параметров состояния шины в соответствии с алгоритмом анализа выбранных гармоник сигналов, отраженных от облученной шины [2], осуществляется синхронный во времени мониторинг величин давления и температуры в каждой из шин шасси летательного аппарата. Для этого сигналы с k информационных датчиков 14, расположенных на колесах шасси летательного аппарата, по радиоканалу поступают на первый вход блока приемников (приемники расположены в районе носовой и основных стоек шасси летательного аппарата). Приемники начинают принимать сигналы k информационных датчиков 13 после начала движения летательного аппарата. С выхода блока приемников сигналы поступают на IV группу входов устройства 4 сбора и обработки информации. На V вход устройства 4 сбора и обработки информации поступают сигналы от первого задатчика 7 постоянных величин, несущие информацию о заданных величинах давления и температуры в шинах колес носовой и основных стоек шасси летательного аппарата с учетом типа летательного аппарата, времени года, географических координат аэродрома и т.д.
Устройство 4 сбора и обработки информации сравнивает текущие величины давления и температуры в каждой шине с заданной величиной, поступающей с первого задатчика 7 постоянных величин, сравнивает текущие величины давления и температуры в G сдвоенных (строенных) шинах колес стоек шасси между собой, передает информацию о давлении и температуре в каждой шине в защищенный бортовой накопитель информации, при разнице величин давления или температуры в каждой из шин колеса и в G сдвоенных (строенных) шинах колес на величину более заданной, формирует сигнал на своем втором выходе для информирования об этом экипажа (оператора) летательного аппарата (появляется сигнал на первом входе индикатора 9 тревоги). При этом, учитывая то, что летательный аппарат производит взлеты и посадки с аэродромов различного класса, имеющих различные длины взлетно-посадочных полос и рулежных дорожек, для дополнительного мониторинга состояния шин колес шасси летательного аппарата представляется целесообразным вести учет пробега каждой шины в процессе ее эксплуатации. Кроме того, из опыта эксплуатации шин летательного аппарата известно, что наибольшие нагрузки шина испытывает в периоды начала взлета и начала приземления. Поэтому как дополнительный элемент мониторинга состояния шины целесообразно рассматриваться количество совершенных ею взлетов-посадок. Пробег каждой шины и количество совершенных ей взлетов-посадок определяется устройством 4 сбора и обработки информации [3]. При превышении шиной заданной величины пробега или заданного числа взлетов-посадок устройство 4 сбора и обработки информации формирует на первом выходе сигнал, записываемый в защищенный бортовой накопитель информации, а на своем третьем выходе сигнал для информирования об этом экипажа (оператора) летательного аппарата (появляется сигнал на втором входе индикатора 9 тревоги). Необходимые для расчета величины пробега шины константы и величины предельных значений пробега шины и предельного значения числа взлетов-посадок для шины поступают на пятый вход устройства 4 сбора и обработки информации с выхода первого задатчика 7 постоянных величин.
Второй задатчик 18 постоянных величин обеспечивает устройство 4 сбора и обработки информации значениями температуры окружающего воздуха, атмосферного давления, скорости и направления ветра, длины, курса ВПП, уклона ВПП, значениями геометрических характеристик летательного аппарата и др. Значения воздушной, путевой и вертикальной скоростей, угла тангажа, аэродинамических характеристик и т.д. поступают на одиннадцатый вход устройства 4 сбора и обработки информации от бортовых информационных систем летательного аппарата.
Блок 17 определения параметров взаимодействия летательного аппарата с ВПП определяет величину коэффициента трения (торможения) летательного аппарата для конкретных реальных условий взлета-посадки. Величина коэффициента трения (торможения) летательного аппарата для конкретных реальных условий взлета-посадки с выхода блока 17 определения параметров взаимодействия летательного аппарата с ВПП поступает на десятый вход устройства 4 сбора и обработки информации. Коэффициент трения (торможения) летательного аппарата является интегральной характеристикой взаимодействия шасси летательного аппарата с ВПП. Согласно нормативным документам FAA [FAAAC 25-31 от 22.12.2015. Subject: Takeoff Performance Data for Operations on Contaminated Runways; FAA AC 25-32 от 22.12.2015. Subject: Landing Performance Data for Time-of-Arrival Landing Performance Assessments], коэффициент торможения является параметром, учитывающим эффекты, связанные с взаимодействием с ВПП тормозящих колес шасси: эффективность антиюзовой системы (АЮС), износ тормозов, износ пневматиков, сопротивление качению, вызванное загрязнителями и трением пневматика о поверхность ВПП.
Такой подход удобен тем, что позволяет с помощью одного параметра оценить взаимодействие шасси с поверхностью ВПП с целью прогнозирования на борту взлетной и посадочной дистанций самолета для предотвращения его выкатывания, повышения эффективности работы АЮС, что в итоге ведет к удлинению межсервисного интервала и увеличению срока службы пневматиков шасси.
В физическом смысле коэффициент торможения μ представляет собой отношение продольной силы торможения колеса шасси Fторм к вертикальной силе нормального давления (нагрузке) Fверт, воздействующей на это колесо (Fверт называют также силой реакции опоры стойки шасси N):
 .
.
Данный коэффициент описывает вклад торможения, вызванного трением пневматика о поверхность ВПП и сопротивлением от загрязнителей ВПП, в общее замедление самолета. Под сопротивлением от загрязнителей понимается дополнительное сопротивление движению самолета по ВПП, вызванное слякотью, рыхлым неслежавшимся снегом и дождевой водой, которые попадают как на колеса шасси, так и на фюзеляж и аэродинамические управляющие поверхности самолета.
В случае если самолет оборудован каналом приема информации о состоянии поверхности ВПП от диспетчерской службы аэродрома, целесообразно использование данной информации в качестве опорной для расчета априорного значения коэффициента торможения.
В соответствии с нормативными документами ИКАО [Международные стандарты и рекомендуемая практика. Приложение 14 к Конвенции о международной гражданской авиации. Аэродромы. Том 1. Проектированиеиэксплуатацияаэродромов, 2009], FAA [Title 14, CodeofFederalRegulations. Section 25.109, Acceleration-stop distance; AC 25-31 от 22.12.2015. Subject: Takeoff Performance Data for Operations on Contaminated Runways; AC 25-32 от 22.12.2015. Subject: Landing Performance Data for Time-of-Arrival Landing Performance Assessments] и EASA [EASA CS-25. Certification Specifications for Large Aeroplanes. Amendment 3. 19.09.2007] предложены следующие значения априорного коэффициента торможения на взлете и посадке (см. табл. 1). Приведенные значения справедливы только для асфальтобетонных искусственных ВПП и не распространяются на грунтовые, травяные, гравийные, снежные, ледовые или водные покрытия.
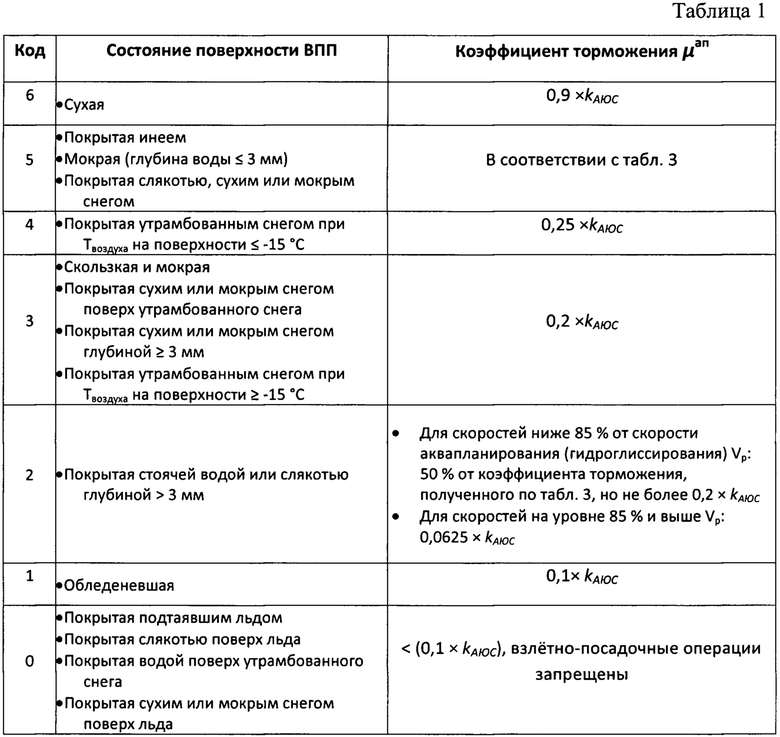
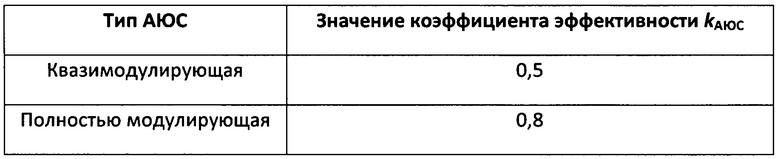
Как видно из табл. 1, расчетное значение априорного коэффициента торможения μап зависит от коэффициента эффективности АЮС kАЮС. Значение данного коэффициента зависит от типа АЮС, которой оборудована система шасси самолета. Значения kАЮС, рекомендуемые для использования EASA и FAA, приведены в таблице 2.

Значение путевой скорости аквапланирования (гидроглиссирования) может быть рассчитано по следующей зависимости:


где Ppsi и PПа - давление пневматика в фунтах на кв. дюйм и Па соответственно.
В соответствии с табл. 1 для расчета μап для кодов состояния поверхности ВПП «2» и «5» в таблице 3 приведены формулы [EASACS-25. CertificationSpecificationsforLargeAeroplanes. Amendment 3. 19.09.2007; Title 14, CodeofFederalRegulations. Section 25.109, Acceleration-stopdistance] определения априорного коэффициента торможения в зависимости от давления пневматика. В данной таблице символом Vпут обозначена истинная путевая скорость летательного аппарата в узлах.
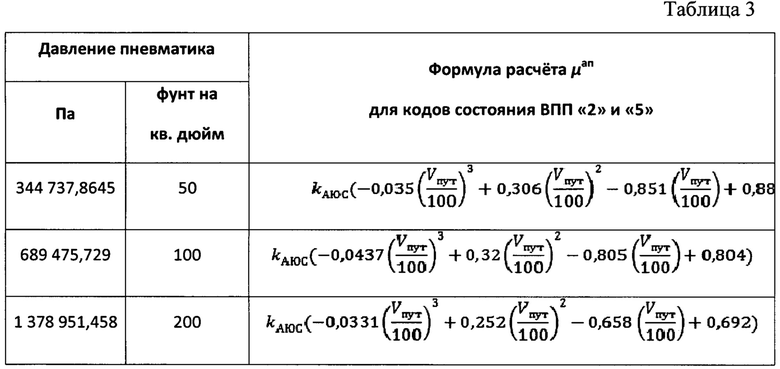
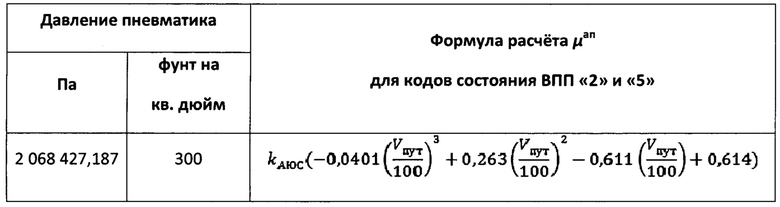
Расчет априорного коэффициента торможения для других значений давления пневматика допустимо проводить путем линейной интерполяции или экстраполяции на основании представленных четырех опорных значений.
В процессе разбега и пробега самолета по ВПП целесообразно вычислять значение фактически реализуемого (текущего) коэффициента торможения. При наличии на борту априорной информации о состоянии ВПП фактически реализуемый коэффициент торможения является корректором коэффициента торможения, рассчитанного по априорной информации о состоянии ВПП. В случае существенного отличия от значения, полученного от диспетчерской службы, фактически реализуемый коэффициент торможения может быть передан (также через диспетчерскую службу) на другие летательные аппараты, выполняющие взлет и заходящие на посадку, что особенно актуально в условиях быстро меняющейся погоды и высокой загруженности аэродрома.
При отсутствии на борту информации о состоянии ВПП (например, по причине неоснащенности летательного аппарата каналом приема соответствующей информации) расчет фактически реализуемого коэффициента торможения является единственным источником информации о состоянии ВПП, которая позволяет пилоту и системе автоматического торможения более эффективно и безопасно выполнить торможение.
Фактически реализуемый коэффициент торможения может быть рассчитан из классического дифференциального уравнения движения ВС по ВПП [Котик М.Г. Динамика взлета и посадки самолетов. - М.: Машиностроение, 1984. - 256 с.; Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения. - М.: Машиностроение, 1978. - 349 с.]:
 ,
,
где Fторм - сила торможения (сила, прикладываемая тормозной системой шасси), Fверт - вертикальная сила реакции опоры поверхности ВПП, Fтд - сила тяги двигателей, Fаэро - сила аэродинамического сопротивления, Fподъем - подъемная сила, mp - реальная масса ЛА, aпрод - продольное ускорение ЛА, g - ускорение свободного падения, θ - уклон ВПП (угол наклона ВПП относительно горизонта), эквивалентный углу тангажа самолета, двигающегося по поверхности ВПП.
Сила аэродинамического сопротивления и подъемная сила определяются следующим образом:
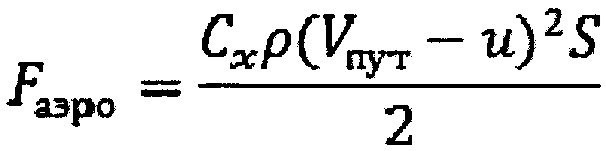 ,
, 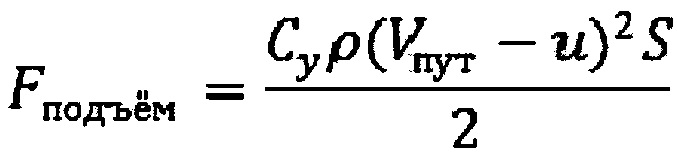 ,
,
где Cx и Cy - коэффициенты аэродинамических сил, зависящие от аэродинамической конфигурации летательного аппарата (положения закрылков, тормозных щитков, интерцепторов, спойлеров и др.) по известным законам, заданным изготовителем летательного аппарата; ρ - плотность наружного воздуха, зависящая от его давления и температуры по известному закону; Vпут - путевая скорость летательного аппарата; u - продольная составляющая скорости ветра; S - площадь крыла.
Суммарная тяга двигателей рассчитывается по известным законам, заданным изготовителем двигателей, и в общем случае зависит от следующих параметров:
 ,
,
где  - режим работы двигателей, определяемый положением рычагов управления двигателей (РУД); n - обороты двигателей; Pвозд - статическое давление наружного воздуха; Tвозд - температура наружного воздуха.
- режим работы двигателей, определяемый положением рычагов управления двигателей (РУД); n - обороты двигателей; Pвозд - статическое давление наружного воздуха; Tвозд - температура наружного воздуха.
Например, согласно руководству по технической эксплуатации двигателя ПС-90А-76, суммарная тяга двигателей при фиксированном режиме работы может быть описана следующим выражением:
 ,
,
где  - тяга двигателей в установившемся режиме при нулевой скорости в стандартных метеоусловиях (P0=760 мм рт. ст., T0=15°С=288 К); Pвозд/760 - множитель, учитывающий отклонение атмосферного давления Pвозд от стандартного 760 мм рт. ст.; (-0,0102Tвозд + 4,0861) - множитель, учитывающий отклонение температуры наружного воздуха от стандартной 288 К; (1 + kтдVприб) - множитель, учитывающий изменение тяги в зависимости от приборной скорости летательного аппарата; kтд - коэффициент относительного изменения тяги в зависимости от скорости; kтд=-0,00245 для прямой тяги, kтд=0,0147 для обратной тяги.
- тяга двигателей в установившемся режиме при нулевой скорости в стандартных метеоусловиях (P0=760 мм рт. ст., T0=15°С=288 К); Pвозд/760 - множитель, учитывающий отклонение атмосферного давления Pвозд от стандартного 760 мм рт. ст.; (-0,0102Tвозд + 4,0861) - множитель, учитывающий отклонение температуры наружного воздуха от стандартной 288 К; (1 + kтдVприб) - множитель, учитывающий изменение тяги в зависимости от приборной скорости летательного аппарата; kтд - коэффициент относительного изменения тяги в зависимости от скорости; kтд=-0,00245 для прямой тяги, kтд=0,0147 для обратной тяги.
Приборная и путевая скорости летательного аппарата связаны со скоростью ветра следующим уравнением:
 ,
,
где ρ0=1,225 кг/м3 - плотность воздуха в стандартных метеоусловиях.
Для расчета статического давления Pвозд (в Па) по известной высоте полета Н применяется барометрическая формула:
 .
.
Подставив приведенные уравнения в формулу расчета фактического коэффициента торможения, получим:
 .
.
Из теории цифровой обработки сигналов известна нелинейная ранговая фильтрация, опирающаяся на понятие порядковой статистики. Относительно текущего измерения некоторого параметра выбирается окрестность, входящие в нее предыдущие измерения упорядочиваются по возрастанию. Ранговый фильтр rank порядка r (1≤r≤W, где W - число отсчетов в окрестности) выбирает из полученного ряда элемент с номером r, и присваивает его значение выходному измерению. Частный случай нелинейного рангового фильтра, когда число W - нечетное и r=(W+1)/2, называется медианным. Число отсчетов W называют также размером статистики или оконной апертурой фильтра.
Ранговая фильтрация позволяет убрать случайные выбросы (т.н. импульсный шум) и повысить робастность расчета.
Ранговый фильтр - это фильтр с конечной импульсной характеристикой, размеры которой характеризуются апертурой W; апертура медианного фильтра обычно имеет размерность 9…121 измерений. В рассматриваемом случае размер апертуры определяется путевой скоростью летательного аппарата Vпут, выполняющего взлет или посадку, и минимальной из двух частот: тактовой частоты ƒдат датчиков измерения переменных параметров, участвующих в расчете, и частоты ƒвыч выдачи решения бортовым вычислителем (микроконтроллером или микропроцессором):
 .
.
Таким образом, в случае наличия на борту априорной информации о состоянии ВПП расчет итогового коэффициента торможения в каждый момент времени выполняется по следующей формуле:
 ,
,
где t - текущее время.
В случае отсутствия на борту априорной информации о состоянии ВПП расчет упрощается:
 .
.
После начала движения летательного аппарата r датчиков (1≤r<∞) третьего устройства 3 обнаружения, измеряющих различные рабочие характеристики систем шасси, включая датчики 19 продольной (направление x), поперечной (направление y) и вертикальной (направление z) нагрузки носового (FxN, FyN, FzN) и датчики 20 основных (FxM, FyM, FzM) колес шасси, датчик 21 угла поворота носового колеса (θNW), датчики 22 тормозного момента (TW) каждого тормозного колеса, датчики 23 тормозного давления (PW) и датчики 24 температуры (TeW) начинают формировать сигналы, которые усиливаются r усилителями (25-30) сигнала и поступают на первые входы r четвертых элементов И (31-36), на вторые входы которых поступает сигнал с выхода второго устройства 2 обнаружения, подтверждающий факт движения летательного аппарата по ВПП. После срабатывания r четвертых элементов И (31-36) сигналы от датчиков поступают на 6 группу входов устройства 4 сбора и обработки информации. В устройстве 4 сбора и обработки информации эти сигналы оцифровываются, обрабатываются и запоминаются.
На основе полученной информации от первого 1, второго 2 и третьего 3 устройств обнаружения в устройстве 4 сбора и обработки информации осуществляется текущий анализ технического состояния планера и шасси летательного аппарата, а также рассчитывается величина интегрального показателя технического состояния - «эффективной массы».
Величина «эффективной взлетной (посадочной) массы» рассчитывается в устройстве 4 сбора и обработки информации следующим образом.
Этап взлета летательного аппарата.
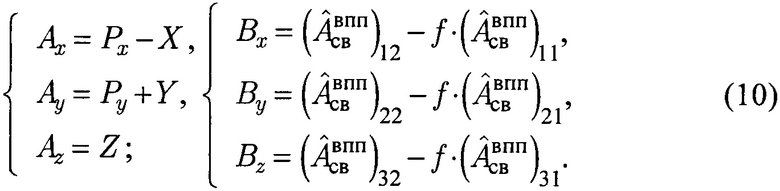
В работе [4] предложен метод контроля процесса взлета, основанный на оценке функции, которая в условиях отсутствия возмущающих факторов является постоянной величиной на протяжении всего разбега летательного аппарата, что позволяет упростить процесс ее контроля. Данная функция названа «эффективной взлетной массой». Ее математическое определение выводится из системы уравнений для продольной и нормальной перегрузок самолета на разбеге, определенных в связанной системе координат OXYZ и записывается следующим образом:
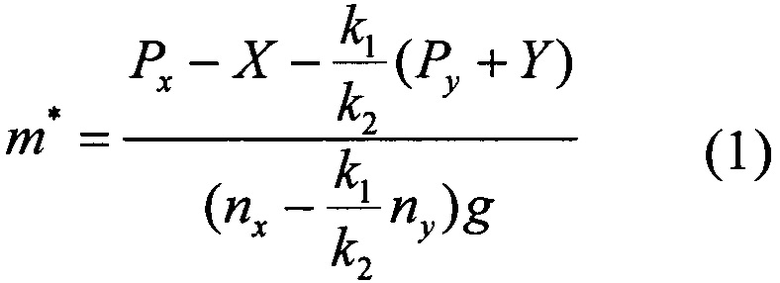
где m* - эффективная взлетная масса; Px и Py - составляющие тяги по осям ОХ и OY связанной системы координат соответственно; X - аэродинамическая продольная сила; Y - аэродинамическая нормальная сила; nx и ny - соответственно продольная и нормальная перегрузки летательного аппарата; g - ускорение свободного падения.
Параметры k1 и k2 выражения (1) определяются следующим образом:


Где ƒ - коэффициент трения качения; ϑ - угол тангажа; η - уклон взлетно-посадочной полосы (ВПП).
Эффективная взлетная масса (1) имеет размерность массы и в условиях абсолютно точного знания всех аргументов, на основании которых она определяется, равна фактической массе летательного аппарата.
Реализация вычисления эффективной взлетной массы на разбеге летательного аппарата связана с возможностями информационно-измерительного комплекса конкретного типа аппарата в сочетании с оборудованием аэродрома. С учетом наземного и бортового оборудования современных летательных аппаратов в алгоритм вычисления эффективной взлетной массы должно быть заложено использование трех групп параметров:
Группа 1. Измеряемые параметры. Их значения поступают в устройство 4 сбора и обработки информации непосредственно из бортовых измерительных систем до начала движения в течение всего разбега летательного аппарата. Например, до начала движения блоком 16 устройства определяется величина реальной взлетной массы летательного аппарата. В течение разбега блоком 17 устройства определяется величина коэффициента трения качения (коэффициента торможения).
Группа 2. Априорные параметры. Их значения заводятся экипажем летательного аппарата во второй задатчик 18 постоянных величин перед взлетом, исходя из информации об ожидаемых условиях предстоящего взлета.
Группа 3. Параметры, определяемые с помощью расчетных моделей. Их значения определяются по формулам или табличным зависимостям, запрограммированным в устройстве 4 сбора и обработки информации. Входной информацией для вычисления параметров этой группы являются параметры 1-й и 2-й групп. К данной группе также относятся параметры, заданные в виде констант для конкретного типа летательного аппарата. В выражении эффективной взлетной массы параметрами, относящимися к группе измеряемых, являются продольная и нормальная перегрузки, а также угол тангажа.
Использование при расчете эффективной взлетной массы информации двух видов - фактической, с одной стороны, и априорной, с другой - лежит в основе принципа использования эффективной взлетной массы как индикатора нештатных отклонений во взлетных характеристиках.
Если фактические значения параметров соответствуют ожидаемым, эффективная взлетная масса равна фактической взлетной массе самолета, которая при штатном взлете должна быть равна реальной взлетной массе. Если фактические значения параметров отличаются от ожидаемых, эффективная взлетная масса отличается от реальной взлетной массы самолета. Это является признаком того, что во взлетных характеристиках имеются нештатные отклонения.
В результате анализа факторов, приведших к авиационным происшествиям на этапе взлета, выделены следующие нештатные отклонения, которые могут быть распознаны с помощью эффективной взлетной массы до скорости V1:
- повышенный коэффициент трения (подторможенность колес, загрязненная поверхность ВПП, лопнувшее или спущенное колесо, не снятие самолета со стояночного тормоза);
- превышение взлетной массы самолета сверх расчетной;
- уменьшение фактической тяги по сравнению с расчетной (при фактическом режиме работы двигателей ниже расчетного или неисправности двигателей).
Перечисленным нештатным отклонениям свойственно меньшее, чем при штатном взлете, значение продольного ускорения, и, как следствие, увеличение длины разбега и дистанции взлета. Признаком наличия данных отклонений является превышение эффективной взлетной массой реальной взлетной массы летательного аппарата на протяжении всего его разбега.
Информирование экипажа о величине отклонения эффективной массы от реальной взлетной массы летательного аппарата на индикаторе 9 тревоги в виде набора световых и звуковых сигналов обеспечивает выбор правильного решения в конкретной ситуации и позволяет повысить безопасность полетов на этапе взлета летательного аппарата.
Этап посадки летательного аппарата.
На этапе посадки величина «эффективной посадочной массы» ЛА определяется из следующего выражения:
где  ,
,  - «эффективная посадочная масса» ЛА и эффективная сила реакции опоры в процессе движения самолета по ВПП при его посадке. Для удобства использования формул запишем выражения для скалярных произведений в явном виде:
- «эффективная посадочная масса» ЛА и эффективная сила реакции опоры в процессе движения самолета по ВПП при его посадке. Для удобства использования формул запишем выражения для скалярных произведений в явном виде:

Вектором перегрузок  называется отношение суммарного вектора всех внешних поверхностных сил, действующих на ЛА, к величине силы тяжести [6]. Вектор перегрузок можно представить в виде:
называется отношение суммарного вектора всех внешних поверхностных сил, действующих на ЛА, к величине силы тяжести [6]. Вектор перегрузок можно представить в виде:

где g - величина напряженности поля тяжести на уровне ВПП. При переходе к скалярному виду вектор перегрузок можно разложить по осям связанной системы координат ЛА:

Здесь: nx - продольная перегрузка, ny - нормальная перегрузка, nz - поперечная перегрузка. Тогда можно найти выражение для суммарного вектора  всех внешних сил, действующих на ЛА:
всех внешних сил, действующих на ЛА:

Подставив это выражение в соотношение (3) получим:

Уравнение (6) является исходным соотношением, позволяющим рассчитать «эффективную посадочную массу» ЛА в случае отклонения его реального движения от расчетного. Если реальное движение ЛА полностью соответствует расчетному движению, то рассчитанная «эффективная посадочная масса» будет в точности совпадать с реальной массой ЛА на данном участке движения. Если в какой-либо системе ЛА возникнет неисправность, рассчитанная «эффективная посадочная масса» будет отличаться от реальной массы ЛА.
Перейдем от векторного равенства (6) к проекциям на оси связанной системы координат ЛА и получим три скалярных соотношения:
Воспользуемся для проекций Nx, Ny, Nz и проекций  ,
,  ,
,  следующими формулами:
следующими формулами:
В результате получим три равенства, которые запишем двумя равнозначными способами:
Здесь введены обозначения:
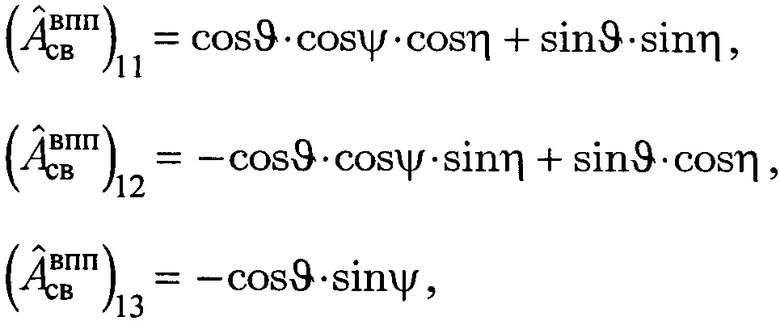
Элементы матрицы перехода  вычисляются по следующим формулам:
вычисляются по следующим формулам:
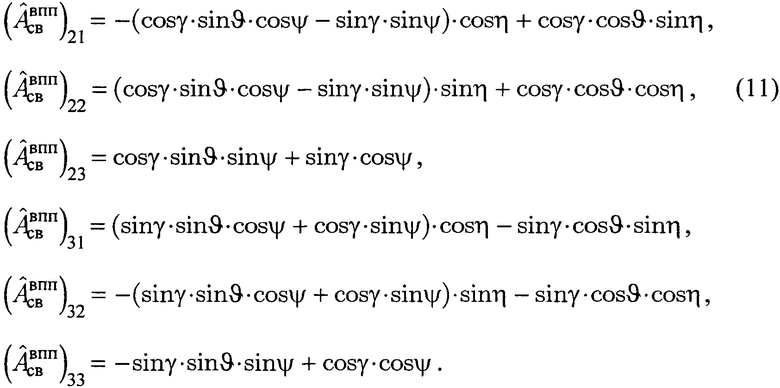
Если реальное движение ЛА совпадает с расчетным, то все три полученные соотношения будут выполняться в любой момент времени, т.е. каждая из систем (9) будет представлять собой совокупность трех тождеств. При этом параметр m будет совпадать с реальной массой ЛА, а параметр N - с реальной силой нормальной реакции ВПП. В случае отличия реального движения от расчетного (по каким-либо причинам, например, возникновения неисправности) соотношения (9) перестанут быть тождествами, они превратятся в уравнения, в которых величины m, N уже будут играть роль неизвестных. Если отличие «эффективной посадочной массы» от реальной превысит некоторое заданное значение, то устройство 4 сбора и обработки информации определит целесообразность продолжения взлета (посадки) и сообщит об этом экипажу ЛА.
Таким образом, использование предложенных способа и устройства позволит повысить качество мониторинга технического состояния конструкции планера и шасси летательного аппарата за счет углубленного мониторинга технического состояния шин и других элементов шасси на этапах движения летательного аппарата по аэродрому, взлета и посадки, а также безопасность полетов за счет более полного информирования экипажа (оператора) о целесообразности продолжения взлета или посадки летательного аппарата.
Источники информации
1. Мужичек С.М., Ефанов В.В., Ефимов А.В. Патент РФ на изобретение №2443991, кл. G01M 17/02, G01S 13/88, 27.02.2012 г.
2. Мужичек С.М., Ефанов В.В., Ефимов А.В. Патент РФ на изобретение №2502058, кл. G01M 17/02, G01S 13/88, 20.12.2013 г.
3. Мужичек С.М., Ефанов В.В., Ефимов А.В., Гриненко Л.Г. Патент РФ на изобретение №2549601, кл. G01M 17/02 (2006.01), G01S 13/88 (2006.01), В64С 25/26 (2006.01) (прототип).
4. Глубокая М.Г. Метод контроля процесса взлета по функции эффективной взлетной массы. // Искусственный интеллект. 2006. №3.
5. Левицкий С.В., Свиридов Н.А. Динамика полета: Учебник для слушателей и курсантов Военно-воздушной инженерной академии им. проф. Н.Е. Жуковского. - М.: ВВИА им. проф. Н.Е. Жуковского, 2008. - 527 с.
6. Глубокая М.Г. Пути решения проблемы безопасности на этапе взлета. // МИЭиА, «Навигация и управление летательными аппаратами», 2010, №2, с. 74-87.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2443991C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502058C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545150C1 |
| Способ инструментального контроля за качеством посадки летательных аппаратов | 2017 |
|
RU2676510C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ПРОДОЛЬНОГО ВЫКАТЫВАНИЯ ВОЗДУШНЫХ СУДОВ ЗА ПРЕДЕЛЫ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2668008C2 |
Группа изобретений относится к способу и устройству мониторинга технического состояния планера и шасси летательного аппарата. Для осуществления способа производят мониторинг ряда зон летательного аппарата в режиме постоянного времени определенным образом, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбоя оборудования. Устройство содержит три устройства обнаружения, устройство сбора и обработки информации, блок сигнализации аварийного состояния, бортовое устройство, блок питания, индикатор тревоги, два задатчика постоянных величин, блок определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, com-порт, блок определения параметров взаимодействия летательного аппарата с ВПП, блок датчиков, состоящий из блока концевых выключателей, датчика движения, высотомера, информационных датчиков (на каждое колесо шасси), датчиков числа оборотов шасси. Обеспечивается повышение безопасности полетов за счет повышения информативности мониторинга жизненно важных элементов шасси, прогнозирование их отказов. 2 н.п. ф-лы, 2 ил.
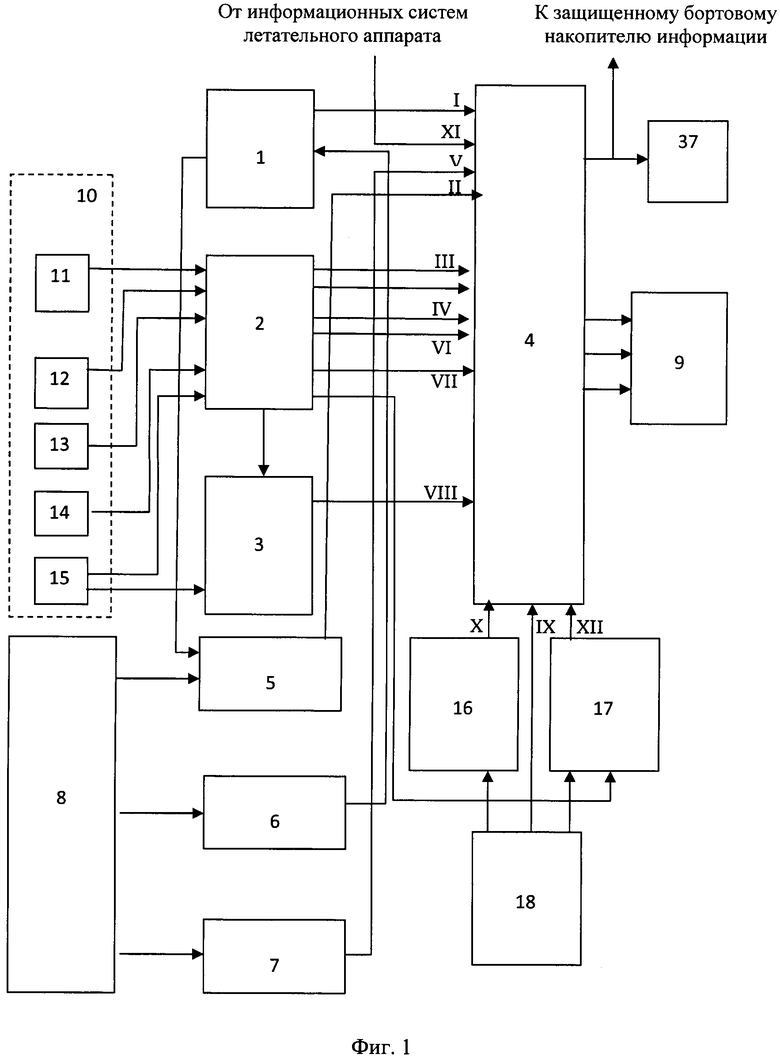
1. Способ мониторинга технического состояния планера и шасси летательного аппарата, заключающийся в мониторинге ряда зон летательного аппарата в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону, устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга, определяют условия, в которых производятся измерения, определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли летательный аппарат в полете или на стоянке, указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков, осуществляют измерение сигнала в течение около 100 мкс при каждом акустическом событии, определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц, преобразуют полученные акустические сигналы в аналоговые электрические сигналы, считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы летательного аппарата на земле и в воздухе, для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с устройством сбора информации, подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбоя оборудования, обеспечивают постоянное питание элементов устройства мониторинга, в обшивке планера летательного аппарата в районе шасси (на стойках шасси летательного аппарата) устанавливают микрорадары, число которых соответствует числу шин шасси летательного аппарата, так, чтобы в диаграмму направленности каждого микрорадара попадала строго определенная «своя» шина, излучают в направлении каждой из шин радиолокационный сигнал и принимают отраженный от шин сигнал при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, производят анализ выбранных гармоник отраженного сигнала, определяют техническое состояние каждой шины в отдельности и системы шин шасси в целом в периоды взлета и посадки летательного аппарата на основе определения параметров состояния шин в процессе анализа выбранных гармоник отраженного сигнала, записывают информацию о параметрах состояния каждой шины в защищенный бортовой накопитель информации, подают сигнал тревоги при переходе параметров любой из шин в неисправное состояние, обеспечивают информирование экипажа (оператора) летательного аппарата о текущем техническом состоянии шин летательного аппарата и возникновении неисправности в период его взлета или посадки, при движении летательного аппарата по аэродрому до момента взлета и от момента посадки до остановки летательного аппарата, измеряют температуру и давление в каждой шине шасси, сравнивают текущие величины давления и температуры в каждой шипе с заданной величиной, сравнивают текущие величины давления и температуры в m сдвоенных (строенных) шинах стоек шасси между собой, записывают информацию о давлении и температуре в каждой шине в защищенный бортовой накопитель информации, при разнице величин давления или температуры в каждой из шин и в m сдвоенных (строенных) шинах на величину более заданной обеспечивают информирование об этом экипажа (оператора) летательного аппарата, измеряют во время взлета и посадки летательного аппарата число оборотов колес основных стоек шасси, определяют пробег каждой шины колеса шасси летательного аппарата за период текущей взлет-посадки, суммируют данный пробег с уже имеющимся, определяют пробег каждой шины с начала эксплуатации, фиксируют текущую взлет-посадку, суммируют последнюю взлет-посадку каждой шины с уже имеющимися, определяют для каждой шины количество взлетов-посадок с начала эксплуатации, записывают информацию о количестве взлетов-посадок для каждой шины и ее пробег с начала эксплуатации в бортовой накопитель информации, при превышении количества взлетов-посадок и (или) пробега какой-либо из шин заданных величин осуществляют информирование об этом экипажа (оператора) летательного аппарата, отличающийся тем, что дополнительно устанавливают и настраивают датчики, измеряющие различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузки (FxN, FyN, FzN,) носового и основных (FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза, определяют реальную взлетную (посадочную) массу и положение центра тяжести летательного аппарата, определяют с помощью бортовых измерительных систем текущие параметры движения летательного аппарата и окружающей среды, определяют с помощью аэродромных служб и руководящих документов параметры взлетно-посадочной полосы (ВПП), летательного аппарата, погодных условий, определяют текущие параметры взаимодействия летательного аппарата с ВПП, определяют эффективную взлетную (посадочную) массу летательного аппарата, сравнивают величину эффективной взлетной (посадочной) массы летательного аппарата с величиной реальной взлетной (посадочной) массы летательного аппарата, по величине расхождения между величинами эффективной взлетной (посадочной) массы летательного аппарата и реальной взлетной (посадочной) массы летательного аппарата определяют целесообразность продолжения взлета (посадки) летательного аппарата, информируют о целесообразности продолжения взлета (посадки) экипаж летательного аппарата, анализируют после завершения полета показания датчиков систем летательного аппарата на предмет наличия отказов и отклонения от заданных параметров, осуществляют замену отказавших элементов и датчиков, их настройку и регулировку.
2. Устройство мониторинга технического состояния планера и шасси летательного аппарата содержит установленные на борту летательного аппарата первое и второе устройства обнаружения, устройство сбора и обработки информации, блок сигнализации аварийного состояния, бортовое устройство, блок питания, индикатор тревоги, первый задатчик постоянных величин, при этом первое устройство обнаружения состоит из множества пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны летательного аппарата и измерения сигнала в течение около 100 мкс при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц, бортовое устройство обеспечивает безопасность работы установленного на борту летательного аппарата первого устройства обнаружения, причем первый и второй выходы первого устройства обнаружения соединены соответственно с первым входом устройства сбора и обработки информации и первым входом блока сигнализации аварийного состояния, выход которого соединен со вторым входом устройства сбора и обработки информации, выход бортового устройства соединен с входом первого устройства обнаружения, первый, второй и третий выходы блока питания соединены соответственно со вторым входом блока сигнализации аварийного состояния, с входами бортового устройства и задатчика постоянных величин, первый, второй, третий и четвертый входы второго устройства обнаружения соединены соответственно с первым, вторым, третьим и четвертым выходами блока датчиков, группа первых выходов, второй выход второго устройства обнаружения соединены соответственно с группой третьих входов, четвертых входов устройства сбора и обработки информации, первый выход которого соединен с входом бортового накопителя информации, а второй выход - с первым входом индикатора тревоги, блок датчиков состоит из блока концевых выключателей шасси летательного аппарата, датчика движения, высотомера, k информационных датчиков, по одному на каждое колесо шасси, при этом выходы концевых выключателей, датчика движения, высотомера и k информационных датчиков являются соответственно первым, вторым, третьим и четвертым выходами блока датчиков, группа выходов первого задатчика постоянных величин соединена с пятой группой входов устройства сбора и обработки информации, второе устройство обнаружения содержит элемент НЕ, элемент И, последовательно соединенные n микрорадаров, n усилителей, n аналого-цифровых преобразователей, а также блок приемников, причем первый, второй, третий и четвертый входы второго устройства обнаружения являются первым, вторым входами первого элемента И, входом элемента НЕ и первой группой входов блока приемников, второй вход которого соединен с выходом первого элемента И, выход элемента НЕ соединен с третьим входом первого элемента И, выход которого соединен со вторыми входами n микрорадаров, блок приемников содержит по одному приемнику на каждую стойку шасси летательного аппарата, группа выходов n аналого-цифровых преобразователей и группа выходов блока приемников являются соответственно первой и второй группой выходов второго устройства обнаружения, которые соединены соответственно с третьей и четвертой группой входов устройства сбора и обработки информации, в блок датчиков введены датчики числа оборотов, во второе устройство обнаружения введены второй и третий элементы И, первый и второй счетчики, дифференцирующая цепь, причем датчики числа оборотов установлены относительно колес основных стоек шасси летательного аппарата, выходы датчиков числа оборотов, которые являются пятым выходом блока датчиков, соединены с пятыми входами второго устройства обнаружения, пятый вход которого является вторыми входами второго и третьего элементов И, первые входы которых соединены соответственно с выходом первого элемента И и выходом блока концевых выключателей шасси летательного аппарата, выходы второго и третьего элементов И соединены с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, вход которой соединен с выходом датчика движения, выходы первого и второго счетчиков являются соответственно третьим и четвертым выходами второго устройства обнаружения, которые соединены с шестым и седьмым входами устройства сбора и обработки информации, третий выход устройства сбора и обработки информации соединен со вторым входом индикатора тревоги, отличающееся тем, что дополнительно введены блок определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, третье устройство обнаружения, состоящее из r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузки носового (FxN, FyN, FzN) и основных FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW) каждого тормоза, второй задатчик постоянных величин, com-порт, блок определения параметров взаимодействия летательного аппарата с ВПП, причем второй выход датчиков числа оборотов колес шасси соединен со вторым входом третьего устройства обнаружения, выход второго устройства обнаружения соединен со вторым входом блока определения параметров взаимодействия летательного аппарата с ВПП, выход второго устройства обнаружения соединен с первым входом третьего устройства обнаружения, группа выходов третьего устройства обнаружения соединена с восьмой группой входов устройства сбора и обработки информации, одиннадцатый вход устройства сбора и обработки информации соединен с группой выходов бортовых информационных систем летательного аппарата, третий вход индикатора тревоги соединен с выходом устройства сбора и обработки информации, первый выход второго задатчика постоянных величин соединен входом блока определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата, второй выход второго задатчика постоянных величин соединен с девятым входом устройства сбора и обработки информации, третий выход второго задатчика постоянных величин соединен с первым входом блока определения параметров взаимодействия летательного аппарата с ВПП, выход блока определения реальной взлетной (посадочной) массы и положения центра тяжести летательного аппарата соединен с десятым входом устройства сбора и обработки информации, выход блока определения параметров взаимодействия летательного аппарата с ВПП соединен с двенадцатым входом устройства сбора и обработки информации, первый выход устройства сбора и обработки информации соединен с входом com-порта, причем третье устройство обнаружения, содержит r датчиков (1≤r<∞), измеряющих различные рабочие характеристики систем шасси, включая продольную (направление х), поперечную (направление y) и вертикальную (направление z) нагрузки носового (FxN, FyN, FzN) и основных FxM, FyM, FzM) колес шасси, угол поворота носового колеса (θNW), тормозной момент (TW) каждого тормозного колеса, тормозное давление (PW) и температуру (TeW), r усилителей сигнала, r четвертых элементов И, причем выходы r датчиков соединены с r входами усилителей сигнала, выходы которых соединены с первыми входами четвертых элементов И, вторые входы которых соединены с группой выходов второго устройства обнаружения, выходы r четвертых элементов И являются группой выходов третьего устройства обнаружения.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2545150C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549601C1 |
| US 7050894 B2, 23.05.2006 | |||
| US 0009617010 B2, 11.04.2017 | |||
| US 20100161174 A1, 24.06.2010. | |||

