Изобретение относится к устройствам для определения положения вертикали места или горизонтальной плоскости, перпендикулярной с ней.
Известны устройства [1], в которых для выставки в вертикаль используют совмещение падающего и отраженного от поверхности масла или ртути луча света. Применение таких устройств ограничено рябью поверхности под действием микросейсм на неподвижном основании и колебанием поверхности - на подвижном.
Известны уровни [2], предназначенные в основном для работы на неподвижном основании.
Принятые за прототип акселерометры [3] обладают чувствительностью порядка 1 угл. с. При работе на движущихся объектах они являются частью гировертикали с погрешностью около 1 угл. мин.
Задачей изобретения является повышение точности определения вертикали места.
Поставленная задача решается тем, что в качестве чувствительного элемента устройства использован баллистический гравиметр, в котором измерение ускорения свободного падения осуществляется с использованием пучка не параллельных лазерных лучей.
На рис.1 изображена схема устройства, на которой приняты следующие обозначения:
1 - основание, 2 - гравиметр, 3 - вакуумная камера, 4 - катапульта, 5 - пробное тело, 6 - лазер, 7 - оптический раздвоитель луча, 8 - делительный оптический элемент, 9, 10 - интерференционные экраны, 11, 12 - фотоприемники, 13 - вычислитель, 14 - оптическое окно вакуумной камеры.
Отличие от прототипа заключается в том, что акселерометр измеряет синус угла отклонения от вертикали, а гравиметр два косинуса, отношение которых содержит тангенс этого угла.
Известно из [1], что измеренная абсолютным лазерным гравиметром величина ускорения свободного падения g1 зависит от косинуса угла α наклона к вертикали 

При малых углах α и β выражения для угла и его погрешности примут вид:
где 
Из этих выражений видно, что угол β следует выбирать так, чтобы его величина была соизмерима с величиной ожидаемой погрешности.
На проверяемое основание 1 устанавливается баллистический лазерный гравиметр 2, содержащий вакуумную камеру 3, внутри которой катапультой 4 подбрасывается пробное тело 5. Лазер 6 размещен вне вакуумной камеры. Внутри камеры закреплены: оптический раздвоитель 7, оптический делительный элемент (полупрозрачное зеркало) 8 и экраны 9 и 10. Фотоприемники интерференционных сигналов 11 и 12 и вычислитель 13 установлены в верхнем объеме гравиметра, отделенном от вакуумной камеры оптическим окном 14.
Испускаемый лазером 6 луч поступает на оптический раздвоитель 7, отражающие грани которого выполнены непараллельными друг другу. С раздвоителя пара сходящихся или расходящихся лучей поступает на полупрозрачное зеркало 8. На зеркале лучи разветвляются, образуя две пары лучей. Одна из них попадает на уголковый отражатель пробного тела 5, а другая на экраны 9 и 10. После переотражения на уголковом отражателе лучи попадают на экраны, образуя на них интерференционные картины. Картины считываются фотоприемниками 11, 12 и преобразуются в электрические сигналы, проступающие в вычислитель 13. Вычислитель после обработки сигналов выдает значение угла наклона основания. Вакуумная камера отделена от остального гравиметра, причем в верхней части в качестве крышки использована плоскопараллельная пластина 14.
Из описания видно, что угол расхождения лучей и его стабильность зависят только от угла между отражающими гранями разделителя 7. Разделитель работает в вакууме, он может быть выполнен из высокостабильного материала, например из подвергнутого старению монокристалла кварца, камеру можно термостатировать вплоть до криогенных температур. При выполнении перечисленных условий погрешность ∆β будет менее десятой доли угловой секунды.
При реальных измерениях используется не менее трех лучей.
На подвижном основании под действием переносных ускорений пробное тело будет смещаться в горизонтальной плоскости относительно лучей, но это не повлияет на угол β.
Источники информации
1. А.П. Юзефович, Л.В. Огородова. Гравиметрия. М.. Недра, 1980.
2. Лазерный нивелир. Пат. РФ 2237825 С1, 12.08.2004.
3. Ривкин С.С., Берман З.И., Окон И.М. «Определение параметров ориентации объекта бесплатформенной инерциальной системой». С-Пб, ЦНИИ «Электроприбор», 1996 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2013 |
|
RU2544262C2 |
| БАЛЛИСТИЧЕСКИЙ ЛАЗЕРНЫЙ ГРАВИМЕТР | 2001 |
|
RU2193786C1 |
| СПОСОБ ИЗМЕРЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ И ГРАВИМЕТРЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523108C1 |
| СПОСОБ ВЫСТАВКИ В ВЕРТИКАЛЬ ЛАЗЕРНОГО ЛУЧА БАЛЛИСТИЧЕСКОГО ГРАВИМЕТРА И ГРАВИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2522116C1 |
| Интерферометр абсолютного гравиметра | 2017 |
|
RU2663542C1 |
| БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР | 2013 |
|
RU2554596C1 |
| Система определения уклонений отвесной линии | 2019 |
|
RU2699907C1 |
| БАЛЛИСТИЧЕСКИЙ ГРАВИМЕТР ДЛЯ СИММЕТРИЧНОГО СПОСОБА ИЗМЕРЕНИЙ | 2001 |
|
RU2192024C1 |
| Способ измерения на движущемся объекте абсолютного значения силы тяжести и гравиметры для его осуществления | 2018 |
|
RU2683117C1 |
| Голограммный баллистический гравиметр | 2015 |
|
RU2617702C1 |
Изобретение относится к области геофизических исследований и касается устройства для определения вертикали места. Устройство содержит чувствительный элемент, в качестве которого используется баллистический гравиметр, который измеряет ускорения свободного падения с помощью пучка непараллельных лазерных лучей. Технический результат заключается в повышении точности измерений. 1 ил.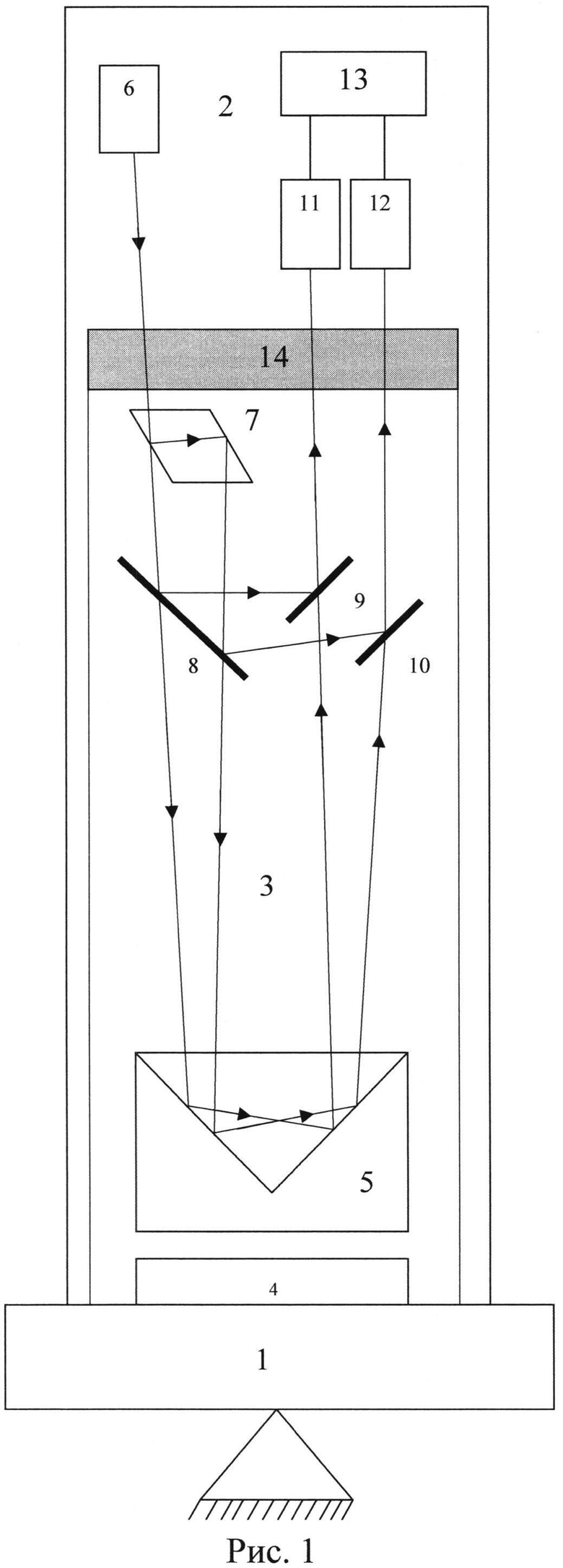
Устройство для определения вертикали места, содержащее чувствительный элемент, отличающееся тем, что в качестве чувствительного элемента использован баллистический гравиметр, в котором измерение ускорения свободного падения осуществляется с использованием пучка непараллельных лазерных лучей.
| Способ определения угла наклона объекта | 1988 |
|
SU1597549A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| БАЛЛИСТИЧЕСКИЙ ЛАЗЕРНЫЙ ГРАВИМЕТР | 2001 |
|
RU2193786C1 |
| WO 2009026004 A1, 26.02.2009 | |||

