Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров управляемых подвижных объектов.
Под навигационными параметрами будем понимать далее составляющие линейных ускорений, скоростей и координат, а также - угловых скоростей и координат управляемого подвижного объекта в базовой системе координат.
В настоящее время известны способы построения инерциальных систем управления платформенного (ПИНС) и бесплатформенного (БИНС) типов. В системах платформенного типа чувствительные элементы (акселерометры и гироблоки) устанавливаются на гиростабилизированной платформе (ГСП), располагаемой в кардановом подвесе. Угловое положение ГСП стабилизируется относительно базовой системы отсчета, создавая тем самым благоприятные условия для работы чувствительных элементов (ЧЭ). Параметры движения центра масс определяют путем решения навигационной задачи по информации, поступающей от акселерометров. Угловое положение объекта определяют по показаниям датчиков углов, установленных на осях карданова подвеса ГСП.
В бесплатформенных системах ЧЭ (акселерометры и датчики угловой скорости) устанавливают на корпусе объекта управления.
В работе [1, стр. 30-32] (см. С.С.Ривкин, З.М.Берман, И.М.Окон. Определение параметров ориентации объекта бесплатформенной инерциальной системой. - СПб: ГНЦ РФ - ЦНИИ “Электроприбор”, 1996. - 226 с. ISBN 5-900780-10-4) указывается, что в зависимости от измеряемых величин и используемых ЧЭ можно выделить три варианта построения бесплатформенных систем, в которых измеряются: линейные ускорения и углы ориентации объекта; линейные ускорения и угловые скорости объекта; линейные ускорения объекта. Практически реализованные бесплатформенные системы навигации и ориентации подвижных объектов построены по второму варианту, в котором применяются жестко закрепленные на объекте три датчика угловых скоростей (ДУС) и три акселерометра (А). С помощью ДУСов и акселерометров определяют абсолютную угловую скорость и кажущееся ускорение объекта в связанной с ним системе координат. Показания ДУСов используют для определения углового положения объекта относительно базовой системы отсчета, а также для преобразования кажущегося ускорения из связанной с объектом системы координат в базовую систему.
В этой же работе отмечается, что бесплатформенные системы имеют ряд преимуществ по сравнению с платформенными, а именно, отсутствием сложной электромеханической системы ГСП, уменьшением габаритов, массы, энергопотребления и рядом других.
Вместе с тем, бесплатформенные системы обладают рядом недостатков, к которым можно отнести:
1) сложность выполнения требований, предъявляемых к чувствительным элементам в части обеспечения точностных характеристик в большом диапазоне изменения измеряемых параметров;
2) при непосредственном креплении ЧЭ на борту объекта они подвергаются более сильном возмущающим воздействием, чем при установке на ГСП;
3) значительно больший объем вычислений, вызванный необходимостью аналитического моделирования опорной системы координат и преобразования сигналов акселерометров и ДУСов;
4) необходимость разработки специальных методов начальной ориентации и калибровки ЧЭ;
5) сложность формирования выходных сигналов.
Для повышения точности работы БИНС ведущими фирмами США, в частности, фирмой Sperry совместно с фирмой Honeywell, при создании ИНС "MARLIN", используется метод разворота и стабилизации блока лазерных ДУСов (ЛГ) относительно двух осей, использование фильтра Калмана 14-го порядка и др.
Задачей настоящего изобретения является повышение точности определения навигационных параметров объекта при использовании бесплатформенной системы управления.
В предлагаемом изобретении это достигается:
- созданием более комфортных условий для работы ЧЭ БИНС;
- возможностью калибровать ЧЭ при предполетной подготовке.
Создание более комфортных условий работы ЧЭ достигается за счет снижения диапазона рабочих угловых скоростей блока ЧЭ путем установки ЧЭ на площадке в кардановом подвесе, позволяющем ей вращаться относительно корпуса объекта с угловой скоростью, по величине, близкой к абсолютной угловой скорости объекта, но в противоположном направлении.
Это осуществляется путем принудительного вращения площадки с помощью двигателей (датчиков моментов), установленных на осях подвеса площадки. Сигналы на двигатели вращения площадки формируется в вычислительном устройстве по сигналам от датчиков угловой скорости, установленных на корпусе объекта управления.
Карданов подвес может быть одноосным, двуосным или трехосным в зависимости от требований, предъявляемых к объекту управления, определяющих характер движения объекта вокруг центра масс. Угловое положение объекта определяют путем суммирования углов поворота площадки, определяемых в вычислительном устройстве по информации от датчиков угловых скоростей, установленных на площадке, с углами поворота объекта относительно площадки, которые определяются по сигналам от датчиков углов, установленных на осях подвеса площадки.
Снижение угловой скорости вращения площадки с ЧЭ БИНС до малой угловой скорости позволяет снизить требования к точностным характеристикам ЧЭ по отдельным параметрам почти на два порядка.
В этом случае основным требованием к ДУСам БИНС является обеспечение высокой точности при работе в малом диапазоне угловых скоростей. При этом создаются благоприятные условия для работы акселерометров. Существенно уменьшаются методические и вычислительные погрешности при определении текущего значения матрицы (кватерниона), характеризующего положение связанной с ЧЭ БИНС системы координат относительно базовой системы координат. Уменьшаются погрешности пересчета текущих кажущихся параметров движения объекта из связанной системы в базовую инерциальную систему координат. Значительно снижаются погрешности, накапливающиеся при интегрировании угловых скоростей площадки, на которой установлены ЧЭ БИНС.
Кроме того, повышается точность определений углового положения объекта, поскольку оно определяется суммированием малых углов поворота площадки с углами поворота объекта относительно площадки, которые определяются позиционными датчиками углов, устанавливаемыми на осях подвеса.
Следовательно, для определения углового положения объекта специально интегрировать полную скорость вращения объекта не требуется. Следует подчеркнуть, что жестких требований к точности угловой скорости разворота площадки относительно корпуса объекта не предъявляется. Отметим также, что обеспечение свободы углового движения площадки относительно объекта даже в ограниченном диапазоне по двум ортогональным осям позволяет производить автономную юстировку ЧЭ БИНС и их начальную выставку относительно базовой системы координат методом векторного согласования непосредственно перед началом движения объекта и тем самым повысить точность БИНС.
В последнее время в БИНС широкое применение находят лазерные датчики угловой скорости, называемые лазерными гироскопами.
В реальных условиях выходная характеристика лазерных гироскопов имеет нелинейный характер, а в общем случае обладает гистерезисными свойствами. Указанное обстоятельство ограничивает возможность измерения малых угловых скоростей, что объясняется явлением “захвата частот”. Это явление заключается в том, что при некоторой скорости вращения ЛГ, когда частоты противоположно направленных лучей мало отличаются друг от друга, нарушается линейность его выходной характеристики, а при скорости вращения, меньше некоторой критической Ωкр, разностная частота становится равной нулю. В результате у прибора возникает область захвата (или “мертвая зона”), внутри которой прибор не дает показаний несмотря на наличие вращения основания. Простейшим способом исключения “мертвой зоны” является вращение ЛГ с угловой скоростью “подставки” Ωп, несколько превышающей угловую скорость “мертвой зоны”. Данный способ позволяет не только исключить “мертвую зону”, но и сделать прибор чувствительным к знаку угловой скорости. Основной недостаток этого способа состоит в высоких требованиях к стабильности скорости принудительного вращения.
В предлагаемом авторами изобретения способе исключение зоны “захвата частот” достигается путем введения подставки в угловую скорость вращения площадки. Это обеспечивается путем вращения площадки относительно объекта с угловой скоростью, равной по величине и обратной по знаку угловой скорости вращения объекта относительно инерциального пространства с учетом угловой скорости подставки Ωп. В этом случае угловая скорость ω вращения площадки, и, следовательно, и ЛГ, относительно инерциального пространства будет приблизительно равна угловой скорости подставки Ωп.
Разность сигналов, пропорциональных угловой скорости вращения площадки, полученных по информации ЛГ, установленных на площадке, и сигналов, пропорциональных угловой скорости подставки Ωп может быть использована в качестве обратной связи для формирования сигналов на двигатели вращения площадки, с целью сведения этой разности к нулю. Следует еще раз подчеркнуть, что никаких высоких требований к стабильности характеристик элементов системы вращения площадки в предлагаемом изобретении не предъявляется. Важно знать точную величину угловой скорости вращения площадки, которая используется в вычислительном устройстве для определения матрицы (кватерниона), характеризующей положение связанной с ЧЭ БИНС системы координат относительно базовой системы координат.
В отличие от ПИНС и БИНС предлагается новый способ построения систем управления, в котором вместо стабилизированной с высокой точностью платформы с установленными на ней гироблоками и акселерометрами, на площадке устанавливается блок с чувствительными элементами БИНС.
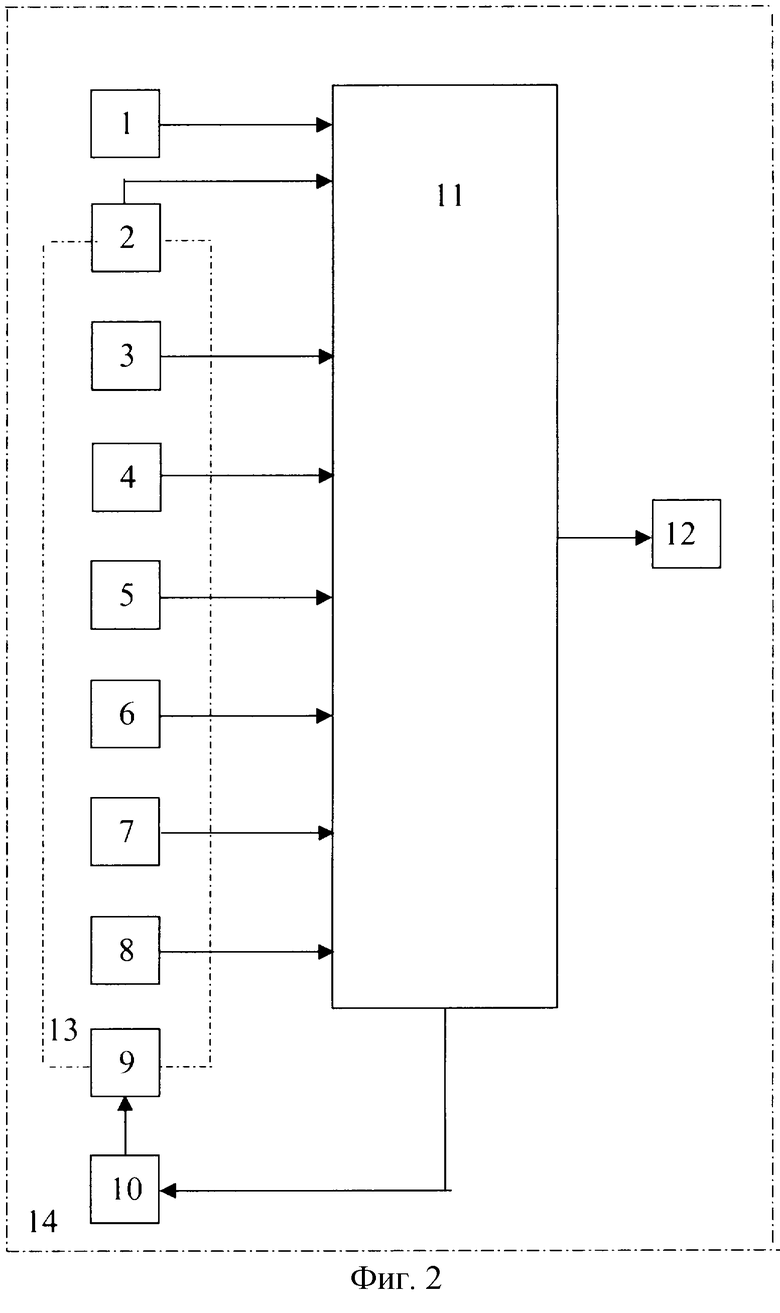
Предложенный способ определения навигационных параметров быстровращающегося вокруг продольной оси снаряда иллюстрируется устройством, в котором блок ЧЭ БИНС установлен на площадке в одноосном кардановом подвесе (фиг.1).
На площадке (2), вращающейся в подшипниках вокруг продолной оси относительно корпуса снаряда (1), установлены три однокомпонентных акселерометра Ax, Ay, Az (3) и три датчика абсолютной угловой скорости ДУСX, ДУСY, ДУСZ (10), блок питания (4).
Измерительные оси акселерометров и ДУСов ориентированы вдоль осей приборного координатного базиса OXYZ, жестко связанного с площадкой.
Акселерометры выдают информацию о проекциях кажущегося ускорения 

 на оси Х, Y, Z.
на оси Х, Y, Z.
ДУСы измеряют проекции ωX, ωY, ωZ абсолютной угловой скорости  площадки на оси трехгранника XYZ.
площадки на оси трехгранника XYZ.
По проекциям ωX, ωY, ωZ в вычислительном устройстве (9) определяют матрицу преобразований С, используя матричное дифференциальное уравнение Пуассона:

где C - есть ортогональная матрица направляющих косинусов прямоугольной системы координат ХYZ, связанной с площадкой (2) по отношению к осям прямоугольной базовой системы координат ξηζ,
Проекции кажущегося ускорения на оси инерциального трехгранника ξηζ, определяют по формуле:
На борту вычисляют навигационные параметры снаряда, используя основное уравнение инерциальной навигации:

где  - кажущееся ускорение в проекциях на оси инерциальной системы координат;
- кажущееся ускорение в проекциях на оси инерциальной системы координат;
 - вектор положения объекта в инерциальной системе координат;
- вектор положения объекта в инерциальной системе координат;
 - ускорение гравитационного поля Земли.
- ускорение гравитационного поля Земли.
Для разворота площадки относительно корпуса снаряда используют двигатель (6) с редуктором (8), который обеспечивает на выходном валу требуемую относительную скорость разворота.
Для формирования управляющего сигнала на двигатель вращения площадки на корпусе снаряда жестко устанавливается дополнительный ДУСX1 (7), который измеряет абсолютную угловую скорость вращения снаряда ωX1 вокруг оси X1. Сигнал с ДУСX1, пропорциональный ωX1 с учетом сигнала подставки Ωп через усилитель (5) подается на двигатель (6) с целью разворота площадки относительно снаряда с угловой скоростью, равной по величине ωX1+Ωп и обратной им по знаку. В этом случае ДУСX (10), установленный на площадке, должен показывать величину угловой скорости вращения площадки, равную - Ωп. В результате все элементы, установленные на площадке (2), будут вращаться относительно инерциального пространства с относительно малой угловой скоростью.
Угловое положение корпуса снаряда относительно инерциальной системы координат определяют по формуле:

где С - матрица, вычисляемая по зависимости (1);
А - ортогональная матрица направляющих косинусов связанной со снарядом прямоугольной системы координат X1Y1Z1 по отношению к осям системы координат XYZ, связанной с площадкой, т.е.
где ϕ - угол, измеряемый датчиком угла (11).
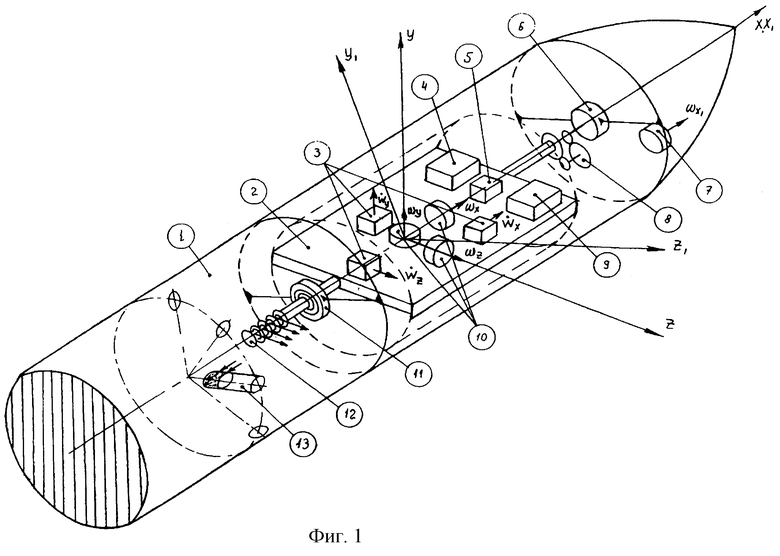
Устройство для определения навигационных параметров управляемых подвижных объектов (фиг.2) содержит вычислительное устройство (9), установленное на корпусе объекта управления (1), приборную площадку (2), установленную на корпусе объекта (1) с помощью карданова подвеса, датчик угловой скорости (7), установленный на корпусе объекта (1), выход которого соединен с входом вычислительного устройства (9), датчик угла (11), установленный на оси карданова подвеса, выход которого соединен с входом вычислительного устройства (9), акселерометры (3) и датчики угловой скорости (10), установленные на приборной площадке (2), выходы которых соединены с входом вычислительного устройства (9), двигатель (6), установленный на оси карданова подвеса, вход которого соединен через усилитель (5) с выходом вычислительного устройства (9), выход вычислительного устройства (9) соединен с входом потребителя навигационных параметров (13) управляемого подвижного объекта.
Вычислительное устройство (9), обрабатывая сигналы с датчика угловой скорости (7), датчика угла (9), акселерометров (3), датчиков угловой скорости (10), вырабатывают сигналы для управления приборной площадкой (2) с помощью двигателя (6), а также вырабатывают сигналы, пропорциональные навигационным параметрам управляемого подвижного объекта, для бортового потребителя (13).
В случае, когда управляемый подвижный объект совершает вращательное движение с большой скоростью одновременно вокруг двух или трех осей, количество осей карданова подвеса и количество дополнительных датчиков угловой скорости, установленных на корпусе объекта управления, соответственно увеличивается.
На фиг.1 обозначено:
X, Y, Z - система координат, связанная с установочной (приборной) площадкой БИНС.
X1, Y1, Z1 - система координат, связанная с корпусом снаряда.
ωX1, ωX, ωY, ωZ - угловые скорости, измеряемые ДУСами.


 - проекции кажущегося ускорения, измеряемые акселерометрами.
- проекции кажущегося ускорения, измеряемые акселерометрами.
1. Корпус управляемого подвижного объекта (корпус снаряда).
2. Приборная площадка БИНС.
3. Акселерометры БИНС: Ax, Ay, Az, установленные на приборной площадке.
4. Вторичный источник питания БИНС.
5. Усилитель системы вращения приборной площадки.
6. Двигатель системы вращения приборной площадки.
7. Датчик угловых скоростей ДУСXI, установленный на корпусе снаряда.
8. Редуктор двигателя системы вращения приборной площадки.
9. Вычислительное устройство (бортовая цифровая вычислительная машина - БЦВМ).
10. Датчики угловой скорости БИНС: ДУСX, ДУСY, ДУСZ, установленные на приборной площадке.
11. Датчик угла поворота корпуса управляемого подвижного объекта (снаряда) относительно приборной площадки.
12. Токоподводы.
13. Бортовой потребитель навигационных параметров.
На фиг.2 обозначено:
1. Корпус управляемого подвижного объекта (корпус снаряда).
2. Приборная площадка БИНС.
3. Акселерометры БИНС: Ax, Ay, Az, установленные на приборной площадке.
5. Усилитель системы вращения приборной площадки.
6. Двигатель системы вращения приборной площадки.
7. Датчик угловых скоростей ДУСXI, установленный на корпусе снаряда.
9. Вычислительное устройство (бортовая цифровая вычислительная машина - БЦВМ).
10. Датчики угловой скорости БИНС: ДУСX, ДУСY, ДУСZ, установленные на приборной площадке.
11. Датчик угла поворота корпуса управляемого подвижного объекта (снаряда) относительно приборной площадки.
13. Бортовой потребитель навигационных параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров управляемых подвижных объектов. Чувствительный элемент (ЧЭ) бесплатформенной системы управления устанавливают на площадке в кардановом подвесе, вращают площадку относительно объекта со скоростью, близкой по величине скорости объекта, но противоположной по знаку, измеряют параметры поступательного и вращательного движения площадки, измеряют угловое положение корпуса объекта относительно площадки, обрабатывают полученные измерения и вычисляют навигационные параметры движения объекта в инерциальном пространстве. В устройстве инерциальной системы, осуществляющем указанный способ, в кардановом подвесе устанавливают площадку, на которой располагают три акселерометра и три датчика угловых скоростей, а на оси карданова подвеса крепят датчик угла и двигатель, принудительно вращают площадку двигателем со скоростью, близкой по величине скорости вращения объекта управления, но в противоположном направлении его вращения, обрабатывают сигналы ЧЭ и определяют в вычислительном устройстве параметры движения объекта, а его ориентацию определяют путем суммирования сигналов, пропорциональных углам поворота площадки относительно базовой системы координат и сигнала, поступающего с датчика угла, установленного на оси подвеса площадки. Техническим результатом является повышение точности определения. 2 с. и 3 з.п. ф-лы, 2 ил.
| РИВКИН С.С | |||
| и др | |||
| Определение параметров ориентации объекта бесплатформенной инерциальной системой | |||
| - СПб., ГНЦ РФ - ЦНИИ “Электроприбор”, 1996, с.30-32 | |||
| RU 2059205 С1, 27.04.1996 | |||
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| GB 1299822 А, 13.12.1972 | |||
| GB 1428037 А, 17.03.1976 | |||
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2125710C1 |

