Область техники
Изобретение относится к средствам проверки, контроля изгиба труб технологических каналов, в ядерных установках, находящихся в эксплуатации в условиях ограниченного доступа к ним, более конкретно, к трубам технологических каналов реакторов РБМК в процессе их эксплуатации. Изобретение может быть использовано в автоматизированных системах непрерывного контроля поведения труб технологических каналов как во время остановки, так и в режиме работы реактора РМБК.
Предшествующий уровень техники
При эксплуатации реакторов с графитовым замедлителем под действием нейтронов и температуры возникают одиночные и групповые дефекты графита, которые приводят к искривлению каналов. Возможны также отклонения режима работы ядерного реактора из-за аварий оборудования или ошибок обслуживающего персонала. В частности, остаточные искривления каналов могут произойти при возникновении более высокой температуры в центре по сравнению с торцами корпуса ядерного реактора.
Искривления технологических каналов приводят к изменению режимов работы ядерного реактора. Точный расчет условий работы активной зоны практически невозможен из-за сложности процессов и неопределенности влияния различных отклонений от первоначальных геометрических размеров. Для своевременного обнаружения и предупреждения развития опасных ситуаций необходим постоянный контроль параметров активной зоны. Поэтому приборы для контроля искривления технологических каналов можно отнести к приборам оперативного контроля. Приборы для контроля отклонения оси канала от вертикали необходимы также при строительстве ядерных реакторов. При этом часто возникает необходимость контроля искривлений в труднодоступных местах сооружений.
Пространственное положение трубы технологического капала определяется углом наклона (зенитным углом), азимутальным углом, а также расстоянием от нулевой отметки до точки измерения углов (уровнем измерения).
Азимутальный угол α - угол между направлением на север и проекцией оси канала или касательной к ней на горизонтальную плоскость.
Азимутальное направление - вектор, совпадающий с проекцией оси канала на горизонтальную плоскость и направлением от точки пересечения оси канала и горизонтальной плоскости в сторону искривления трубы технологического канала.
Контроль искривления технологических каналов и графитовых колонн обеспечит более безопасную, надежную и эффективную эксплуатацию, прогнозирование срока службы действующих АЭС и позволит конструировать проектируемые вновь АЭС на более длительные сроки.
Известно устройство для контроля геометрических параметров технологических каналов ядерного реактора (патент РФ №2265252, от 03.11.2003, G21C 17/01, G21C 17/017, G01N 29/24, G01R 1/067, G01B 17/00, автор Афонасов А.А.), содержащее измерительный зонд с датчиком и передатчиком сигнала, сообщенным линией связи с приемником сигнала, средство для перемещения зонда по длине канала и источник питания.
Недостатком данного устройства можно считать ограниченность по месту и времени контроля работающего реактора, обусловленную проведением контроля с использованием перегрузочной машины. Кроме того, затруднено применение устройства при боковых изгибах технологических каналов на величину, большую радиуса технологического канала.
В качестве прототипа для устройства было выбрано устройство для контроля искривления технологических каналов ядерного реактора (патент РФ №2361173, от 13.08.2007, авторы: Антоненко М.В., Кохомский А.Г., Мастега Н.А., Чуканов В.Б.), в котором гибкий стержневой элемент, набранный из втулок, взаимодействует с датчиком, установленным в верхней части технологического канала. Втулки соединены крепежными муфтами посредством штифтов с обеспечением зазора между торцами втулок, при этом в верхней части стержневого элемента предусмотрен утяжелитель, а опорная муфта выполнена в виде стакана с отверстием в донной части.
Недостатком данного устройства можно считать низкую чувствительность к искривлению технологических каналов. Устройство не позволяет получить данные по азимутальному углу изгиба, а также получить информацию об изгибах на разных уровнях измерения по высоте технологических каналов.
В качестве прототипа для способа было выбрано описание работы устройства для контроля искривления технологических каналов ядерного реактора (патент РФ №2361173, от 13.08.2007, авторы: Антоненко М.В., Кохомский А.Г., Мастега Н.А., Чуканов В.Б.), в котором гибкий стержневой элемент помещают в разгруженный технологический канал до упора в грибок разгрузочного механизма. Показания датчика перемещения устанавливают на нулевую отметку. В технологическом канале устанавливают заданный расход теплоносителя. По мере искривления канала в процессе его эксплуатации изменяется величина зазора между цилиндрическими втулками, в результате чего стержневой элемент изгибается, принимая форму канала, что приводит к изменению положения сердечника в датчике перемещения. Регистрация показаний датчика перемещения производится непрерывно с помощью вторичной аппаратуры, например самописца.
Недостатком данного способа можно считать низкую чувствительность к искривлению технологических каналов. Способ не позволяет получить данные по азимутальному направлению изгиба, а также получить информацию об уровнях, на которых произошли изгибы, измеренных по высоте технологического канала.
Раскрытие изобретения
Задачей, на решение которой направлено заявляемое изобретение, является повышение информативности способа измерения при непрерывном контроле, повышение универсальности устройства.
Технический результат, достигаемый в способе при решении этой задачи, заключается в одновременном измерении угла искривления трубы канала, азимутального направления искривления и уровня нахождения искривления. Технический результат в устройстве заключается в использовании секционной конструкции устройства, в унифицированном использовании части устройства в составе измерительного прибора.
Для получения указанного технического результата в способе для непрерывного контроля изгиба трубы технологического канала выставляют датчик перемещения на нулевую отметку перед началом контроля, размещают гибкую измерительную штангу в разгруженной трубе технологического канала, создают в ней условия работающего реактора. При изменении формы штанги срабатывает механический индикатор. Регистрируют показания датчика перемещения. Согласно изобретению в качестве механического индикатора используют торец секции штанги, закрепленный с возможностью движения внутри сопрягаемой секции на длину L. При размещении измерительной штанги в трубе технологического канала на фиксированном уровне расположения изгиба под воздействием искривления трубы изменяется в стыке секций измерительной штанги межсекционный изгиб на угол α в азимутальном направлении θ, при котором определяют величину смещения Δ механического индикатора. После этого вычисляют угол межсекционного изгиба по формуле α=Δ/L. Далее определяют азимутальное направление θ межсекционного изгиба по направлению вектора, началом и концом которого являются точки положения механического индикатора до и после измерения искривления трубы канала. После запуска реактора и продолжения искривления трубы контролируют динамику относительного смещения механического индикатора и определяют изменение угла α в азимутальном направлении θ изгиба контролируемой трубы в процессе ее эксплуатации.
Совокупность существенных признаков позволяет осуществить одновременное измерение угла искривления трубы канала, азимутального направления искривления и уровня нахождения искривления. Это повышает информативность способа измерения.
Для определения величины смещения Δ механического индикатора возможно регистрировать общее электрическое сопротивление механического индикатора и датчика в зависимости от точки их контакта. При известной зависимости сопротивления от координаты на поверхности датчика определяют начальное и конечное положение механического индикатора.
Перед загрузкой в реактор штангу лучше всего свободно вывешивать вертикально, затем определять положение механического индикатора на поверхности датчика как нулевую отметку для данного стыка секций.
Технический результат в устройстве достигается тем, что устройство непрерывного контроля изгиба трубы технологического канала содержит гибкую измерительную штангу, связанную с датчиком перемещения и состоящую из последовательно соединенных секций в виде втулок, соединенных последовательно между собой встык посредством муфт. Согласно изобретению в любом из стыков торец одной секции выполнен из токопроводящего материала, заужен и расположен внутри сопрягаемой секции на длину L. Таким образом, образуется индикатор, контактирующий с датчиком перемещения с возможностью движения по его поверхности. При этом датчик перемещения жестко закреплен внутри сопрягаемой секции и связан электрически с источником тока, расположенным вне контролируемой трубы.
Совокупность существенных признаков позволяет использовать в устройстве секционную конструкцию, а также унифицировано использовать части устройства в составе измерительного прибора для измерения угла искривления трубы канала, азимутального направления искривления и уровня нахождения искривления одним прибором.
Датчик перемещения может быть выполнен с переменным внутренним сопротивлением в зависимости от места контакта с индикатором.
Механический индикатор может быть связан электрически с источником тока.
Секции с зауженным концом могут быть расположены в тех стыках штанги, где предполагается искривление трубы технологического канала после расположения в ней штанги.
Краткое описание чертежей
На фиг.1 показано расположение штанги внутри технологического канала.
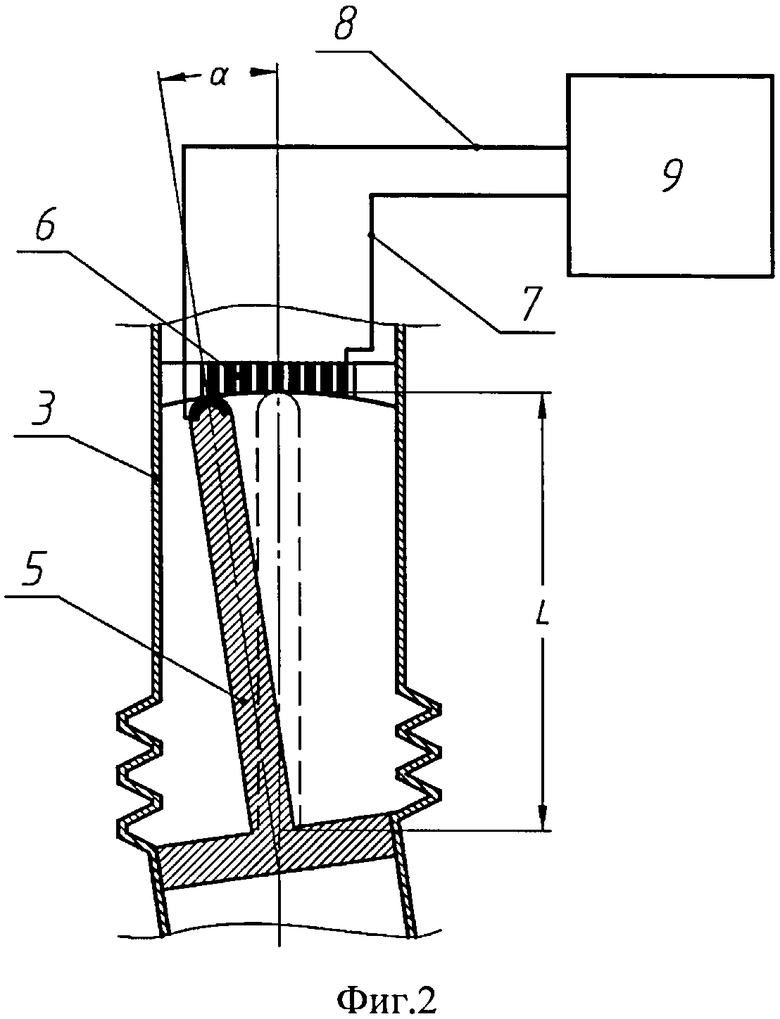
На фиг.2 показана схема срабатывания индикатора и датчика.
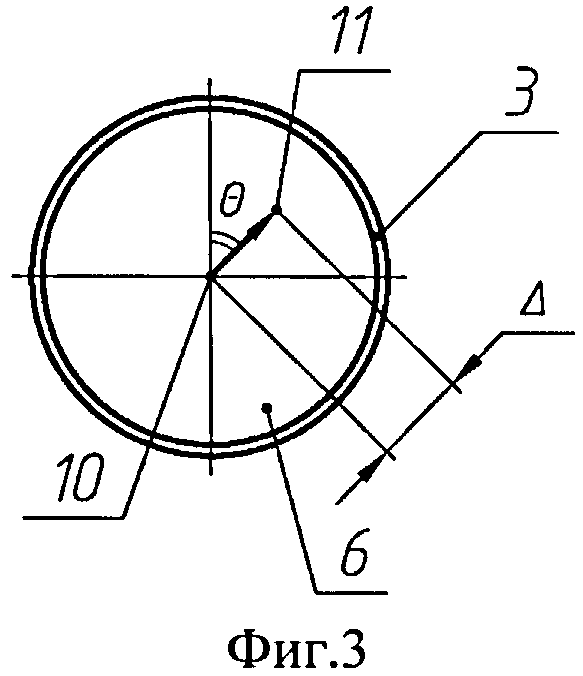
На фиг.3 показана схема определения азимутального направления θ.
Варианты осуществления изобретения
Как показано на фиг.1, в трубу 1 технологического канала через ее верхний торец вставляют и располагают на время контроля эксплуатации этой трубы многосекционную гибкую в межсекционных стыках измерительную штангу 2, содержащую отдельные трубчатые секции 3. Штанга 2 входит внутрь трубы 1 с минимально возможным зазором, но с обеспечением свободного перемещения вдоль трубы 1. Муфты 4, соединяющие секции 3, дают возможность изгиба штанге 2 относительно ее оси без возможности поворота вокруг этой оси. Муфты 4 могут быть выполнены в виде сильфонов.
Торец секции 3, используемый для контроля изгиба трубы 1, выполняют зауженным. Он выполнен из токопроводящего материала и расположен внутри сопрягаемой секции 3 на длину L (на фиг.2), образуя индикатор 5. Внутри сопрягаемой секции 3 зафиксирован датчик перемещения 6, контактирующий с индикатором 5 с возможностью перемещения индикатора 5 по поверхности датчика 6. Датчик перемещения 6 представляет собой изогнутую площадку, каждой точке на поверхности которой соответствует своя величина электрического сопротивления.
Как показано на фиг.2, к датчику 6 от верхнего торца штанги 2 протянут электрический кабель, содержащий провода 7 и 8. Провод 8 для создания замкнутой электрической цепи в рассматриваемом варианте присоединен к индикатору 5.
Перед загрузкой в трубу 1 технологического канала реактора штангу 2 свободно вывешивают вертикально. Затем подают по проводам 7 и 8 напряжение. Электрический ток проходит по проводу 7 через тело датчика 6, обладающее переменным сопротивлением в месте контакта с индикатором 5, и далее по проводу 8 наверх к аппаратуре распознавания 9 за пределами реактора, где происходит измерение электрического сопротивления цепи. По величине сопротивления определяют положение индикатора 5 на поверхности датчика 6. Запоминают положение механического индикатора 5 на поверхности датчика 6 как нулевую отметку для данного стыка секций 3.
Опускают измерительную штангу 2 в трубу 1 технологического канала. В случае если труба 1 искривлена, то это искривление воздействует на измерительную штангу 2. Под таким воздействием в стыке секций 3 измерительной штанги 2 изменяется межсекционный изгиб на угол α (на фиг.2) в азимутальном направлении θ (на фиг.3). Муфты 4, деформируясь, позволяют штанге 2 принять то положение, которое позволяет изогнутая труба 1. Секция 3 с индикатором 5 изгибается на угол α. Индикатор 5 меняет свое положение на поверхности датчика 6 из точки контакта в нулевой отметке 10 в точку контакта после искривления 11. В точке контакта 11 индикатора 5 и датчика 6 изменяется сопротивление электрической цепи. Этот факт измеряют в аппаратуре распознавания 9. По известным заранее характеристикам датчика 6 о соответствии любой точки на его поверхности конкретной величине сопротивления цепи определяют новое местоположение индикатора 5 на поверхности датчика 6. Зная начальное и конечное положение индикатора 5, определяют траекторию смещения Δ механического индикатора 5.
Зная величину L, вычисляют угол межсекционного изгиба по формуле α=Δ/L.
Определяют азимутальное направление θ межсекционного изгиба по направлению вектора, началом и концом которого являются точки контакта 10 и 11 механического индикатора 5 (на фиг.4). Сделав замеры, продолжают дальнейшее опускание штанги 2 вниз по трубе 1. При каждом искривлении трубы 1 повторяют описанные операции измерения. При достижении штангой 2 нижней отметки опускания получают полную картину искривления трубы 1 до начала ее эксплуатации.
Оставляют штангу 2 в трубе 1 для дальнейшего использования. Запускают реактор. Труба 1 под воздействием реактора продолжает искривляться. Штанга 2 может состоять из любого количества секций 3 и быть снабжена любым количеством индикаторов 5, и датчиков 6. На основании этого контролируют динамику изменения межсекционных изгибов на разных уровнях глубины трубы 1 по смещению механических индикаторов 5, расположенных на известных уровнях глубины трубы 1. Определяют изменение угла α, азимутальное направление θ. Зная уровень глубины расположения стыка секций 3, от которого приходит сигнал об искривлении трубы 1, определяют уровень расположения изгиба контролируемой трубы 1 в процессе ее эксплуатации.
Промышленная применимость
Наиболее эффективно выглядит использование предложенного способа при проверке и контроле изгиба труб технологического канала, в ядерных установках, находящихся в эксплуатации в условиях ограниченного доступа к ним, там, где в рабочем режиме невозможно близкое присутствие человека из-за агрессивной среды. Рассмотренный вариант выполнения изобретения может быть реализован на существующем в настоящее время оборудовании с применением известных материалов. Это показывает его работоспособность и подтверждает промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ИЗГИБА ТРУБЫ ТЕХНОЛОГИЧЕСКОГО КАНАЛА | 2013 |
|
RU2554116C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ИСКРИВЛЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ЯДЕРНОГО РЕАКТОРА | 2019 |
|
RU2714488C1 |
| СПОСОБ ИНДИКАЦИИ ИЗГИБА КАНАЛА РЕАКТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2540420C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ | 1994 |
|
RU2115089C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И УСТРАНЕНИЯ ТЕЧИ В БАССЕЙНЕ ВЫДЕРЖКИ ОЯТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2392597C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИСКРИВЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ ЯДЕРНОГО РЕАКТОРА | 2007 |
|
RU2361173C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА, НАХОДЯЩЕГОСЯ В РАДИАЦИОННО-ОПАСНОЙ ЗОНЕ | 2009 |
|
RU2407079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ ПРАВКИ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК | 2001 |
|
RU2203155C1 |
| СПОСОБ ПОИСКА МЕСТА НЕГЕРМЕТИЧНОСТИ В РЕЗЕРВУАРЕ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2392594C1 |
Способ и устройство предназначены для разовой проверки и постоянного контроля изгиба труб 1 технологических каналов в ядерных установках. Устройство содержит гибкую измерительную штангу 2. Штанга 2 состоит из секций 3, последовательно соединенных муфтами 4. Торец секции 3 выполнен из токопроводящего материала. Индикатор 5 состоит из части секции 3, расположенной внутри сопрягаемой секции на длину L. Датчик 6 имеет переменное внутреннее сопротивление. Перед началом контроля выставляют датчик 6 на нулевую отметку. Размещают штангу 2 в трубе 1. Под воздействием искривления трубы 1 изменяется в стыке секций 3 межсекционный изгиб на угол α в азимутальном направлении θ. Индикатор 5 движется по поверхности датчика 6. Регистрируют сопротивление индикатора 5 и датчика 6 в точке контакта. Определяют начальное и конечное положение индикатора 5. Определяют величину смещения Δ индикатора 5. Вычисляют угол изгиба по формуле α=Δ/L. Определяют азимутальное направление θ и уровень изгиба. Запускают реактор. Контролируют динамику смещения индикатора 5. Одновременно определяют α, θ и глубину уровня искривления. Повышается информативность способа измерения при непрерывном контроле. Повышается универсальность устройства. 2 н. и 5 з.п. ф-лы, 3 ил.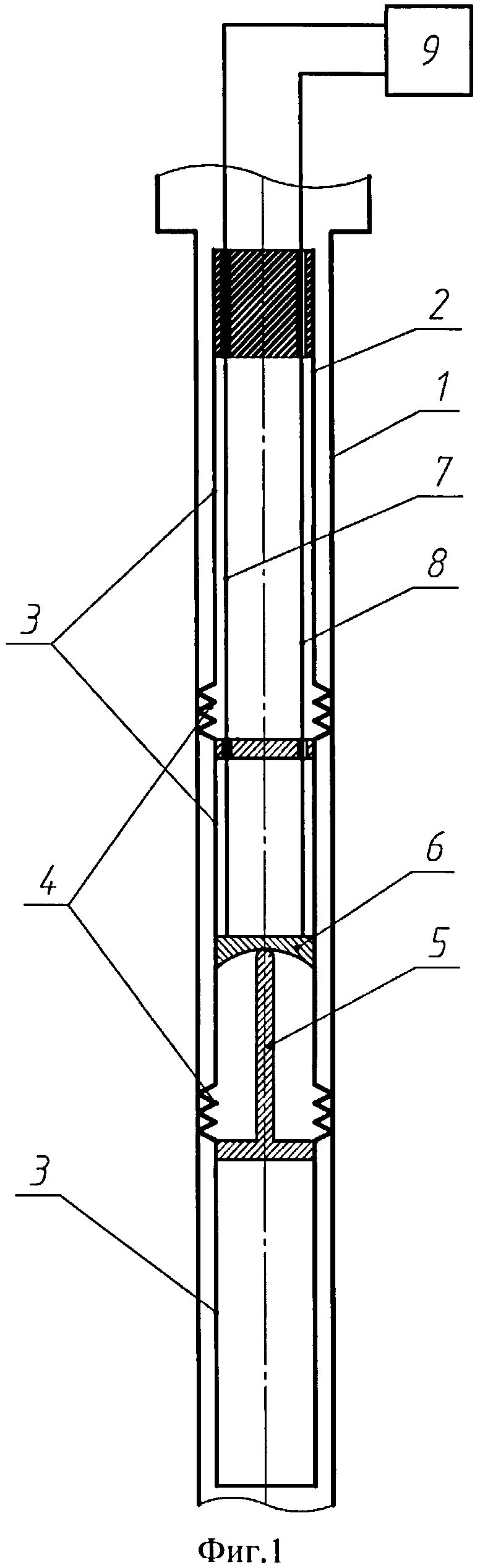
1. Способ для непрерывного контроля изгиба трубы, включающий выставление датчика перемещения на нулевую отметку перед началом контроля, размещение гибкой измерительной штанги в разгруженной трубе технологического канала, создание в канале условий работающего реактора, изменение формы штанги, срабатывание механического индикатора, регистрацию показаний датчика перемещения, отличающийся тем, что в качестве механического индикатора используют торец секции штанги, закрепленный с возможностью движения внутри сопрягаемой секции на длину L, при размещении измерительной штанги в трубе технологического канала, на фиксированном уровне расположения изгиба, под воздействием искривления трубы изменяется в стыке секций измерительной штанги межсекционный изгиб на угол α в азимутальном направлении θ, при котором определяют величину смещения Δ механического индикатора, вычисляют угол межсекционного изгиба по формуле
α=Δ/L, определяют азимутальное направление θ межсекционного изгиба по направлению вектора, началом и концом которого являются точки положения механического индикатора до и после измерения искривления канала, после запуска реактора и продолжения искривления трубы контролируют динамику относительного смещения механического индикатора и определяют уровень расположения изгиба контролируемой трубы, изменение угла α, азимутального направления θ изгиба контролируемой трубы в процессе ее эксплуатации.
2. Способ для непрерывного контроля по п.1, отличающийся тем, что для определения величины и направления смещения Δ механического индикатора регистрируют общее электрическое сопротивление механического индикатора и датчика в точке их контакта, при известной зависимости сопротивления от координаты на поверхности датчика определяют начальное и конечное положение механического индикатора.
3. Способ для непрерывного контроля по п.1 или 2, отличающийся тем, что перед загрузкой в реактор штангу свободно вывешивают вертикально, затем определяют положение механического индикатора на поверхности датчика как нулевую отметку для конкретного стыка секций.
4. Устройство для непрерывного контроля изгиба трубы, содержащее гибкую измерительную штангу, связанную с датчиком перемещения и состоящую из последовательно соединенных секций в виде втулок, соединенных последовательно между собой встык посредством муфт, отличающееся тем, что в любом из стыков торец одной секции выполнен из токопроводящего материала, заужен и расположен внутри сопрягаемой секции на длину L, образуя индикатор, контактирующий с датчиком перемещения с возможностью движения по его поверхности, при этом датчик перемещения жестко закреплен внутри сопрягаемой секции и связан электрически с источником тока, расположенным вне контролируемой трубы.
5. Устройство по п.4, отличающееся тем, что датчик перемещения выполнен с переменным внутренним сопротивлением, зависимым от места контакта его с индикатором.
6. Устройство по п.4, отличающееся тем, что механический индикатор связан электрически с источником тока.
7. Устройство по п.4, отличающееся тем, что секции с зауженным концом расположены в тех стыках штанги, где предполагается искривление трубы технологического канала после расположения в ней штанги.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИСКРИВЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ КАНАЛОВ ЯДЕРНОГО РЕАКТОРА | 2007 |
|
RU2361173C2 |
| WO2011114077 A2, 22.09.2011 | |||
| WO1993013413 A1, 08.07.1993 | |||
| Исполнительный орган буровой машины | 1979 |
|
SU887805A1 |

