Изобретение относится к области транспортных средств, в частности к многосекционным тепловозам, и касается их управления.
Известны технические решения по управлению многосекционными тепловозами, например грузовыми тепловозами 2ТЭ116, при которых управление оборудованием ведомых секций осуществляется путем установки дополнительного коммутационного оборудования, реле и переключателей, а также посредством организации так называемых межсекционных соединений путем передачи сигналов управления через проводные соединения с уровнем напряжения бортовой сети (Тепловоз 2ТЭ116 / С.П. Филонов, А.И. Гибалов, Е.А. Никитин и др. 3-е изд., перераб. и доп. - М.: Транспорт, 1996, стр.246-320).
Недостатком этих технических решений является низкая надежность электрической схемы тепловозов, сложность схемы из-за наличия большого количества релейных элементов, реализация алгоритмов управления оборудованием секций тепловозов посредством большого количества блокировок и перекрестных связей, что влечет за собой необходимость прокладки значительного количества проводов как внутри каждой секции, так и для обеспечения управления оборудованием всех секций многосекционного тепловоза и, как следствие, увеличение стоимости оборудования и трудоемкости работ по техническому обслуживанию.
Кроме того, полностью отсутствует возможность унификации схемы управления различных многосекционных тепловозов, большое число проводов и соединений снижает надежность работы системы управления тепловозом, осложняет условия труда локомотивных бригад и обслуживающего персонала в случае необходимости расцепления и сочленения секций тепловозов.
Известна безрелейная схема цепей управления электровозом, принятая за прототип, содержащая пульт управления машиниста, контроллер машиниста с задатчиком режимов движения, силовые аппараты с различными приводами и систему дистанционного управления с «жесткой» логикой функционирования, при этом система дистанционного управления выполнена на типовых логических элементах, причем входные сигналы для контроля блокировок состояния силовых аппаратов и включения имитаторов реле согласно алгоритму заменяемой релейной схемы поступают через три блока входных делителей напряжения с оптической развязкой на входы двух блоков электронной коммутации, соединенных между собой; входы семи блоков выходных электронных ключей соединены с выходами двух блоков электронной коммутации, а выходы первых шести блоков подключены к катушкам силовых аппаратов, работающих от постоянного тока, выходы седьмого блока используются для включения маломощных двигателей переменного тока (RU, патент на изобретение №2405687 C1, кл. B60L 15/00, 2006 г.).
Недостатком этого технического решения является то, что для реализации алгоритма управления в системе дистанционного управления используется принцип «жесткой» логики функционирования, что делает невозможной унификацию для различных типов локомотивов. Кроме того, снижается надежность работы системы управления локомотивом из-за необходимости наличия большого числа проводных соединений для передачи сигналов управления в ведомые секции, увеличивается стоимость оборудования, сложность электрической схемы и трудоемкость обслуживания.
Техническим результатом заявленного изобретения является унификация схемы управления многосекционным тепловозом с одновременным упрощением, повышение надежности работы системы управления тепловозом, снижение стоимости оборудования, облегчение условий труда локомотивных бригад и обслуживающего персонала.
Технический результат достигается тем, что система управления многосекционным тепловозом, содержащая пульт управления машиниста, контроллер машиниста с задатчиком режимов движения, силовые аппараты и систему дистанционного управления, выполненную на типовых логических элементах, в которой пульт управления машиниста снабжен дисплейным модулем, а система дистанционного управления снабжена программируемым контроллером и типовыми логическими элементами, выполненными в виде типовых устройств ввода дискретных сигналов контроля состояния контроллера машиниста, задатчика режимов движения, блок-контактов силовых аппаратов, в виде типовых устройств вывода дискретных сигналов управления силовыми аппаратами, в виде типовых устройств ввода частотных сигналов скорости колесных пар, в виде типовых устройств ввода аналоговых сигналов измерительных преобразователей с аналоговыми выходами, в виде типовых устройств ввода температурных параметров от температурных датчиков, в виде типовых устройств вывода сигналов управления тиристорными преобразователями, а также снабжена многоканальным блоком связи, при этом программируемый контроллер соединен:
- своими входами и выходами через типовые устройства ввода дискретных сигналов с контроллером машиниста, задатчиком режимов движения, блок-контактами силовых аппаратов,
- своими входами и выходами через типовые устройства вывода дискретных сигналов с вводами силовых аппаратов,
- своими входами и выходами через типовые устройства ввода частотных сигналов контроля скорости колесных пар с датчиками частоты вращения колесных пар,
- своими входами и выходами через типовые устройства ввода аналоговых сигналов от измерительных преобразователей с измерительными преобразователями с аналоговыми выходами,
- своими входами и выходами через типовые устройства ввода температурных параметров с выходами температурных датчиков,
- своими входами и выходами через типовые устройства вывода сигналов управления тиристорными преобразователями с входами управления тиристорных преобразователей,
а также соединен своими входами и выходами через многоканальный блок связи с вводом и выводом дисплейного модуля и с вводами, выводами другого оборудования, а также с вводами и выводами многоканальных блоков связи систем дистанционного управления всех секций тепловоза, при этом многоканальные блоки связи различных секций тепловоза соединены по аппаратно и программно защищенному каналу связи на базе протокола CAN 2.0 B для передачи управляющей информации и многоканальные блоки связи различных секций тепловоза соединены по широковещательному каналу связи на базе сетевого протокола ETHERNET для передачи большого объема диагностической информации в системы управления других секций тепловоза.
На чертеже изображена структурная схема предлагаемой системы управления многосекционным тепловозом.
Система управления 1 многосекционным тепловозом содержит в каждой секции пульт управления машиниста 2, контроллер машиниста 3 с задатчиком режимов движения 4, силовые аппараты 5 и систему дистанционного управления 6. Пульт управления машиниста 2 снабжен дисплейным модулем 7. Система дистанционного управления 6 каждой секции снабжена программируемым контроллером 8 и типовыми логическими элементами, выполненными в виде типовых устройств: 9 - ввода дискретных сигналов контроля состояния контроллера машиниста, задатчика режимов движения, блок-контактов силовых аппаратов, 10 - вывода дискретных сигналов управления силовыми аппаратами, 11 - ввода частотных сигналов скорости колесных пар посредством датчиков частоты вращения колесных пар, 12 - ввода аналоговых сигналов от измерительных преобразователей с аналоговыми выходами, 13 - ввода температурных параметров от температурных датчиков, 14 - вывода сигналов управления тиристорными преобразователями, а также снабжена многоканальным блоком связи 15. Программируемый контроллер 8 соединен:
- своими входами и выходами через типовые устройства 9 ввода дискретных сигналов с контроллером машиниста 3, задатчиком режимов движения 4, блок-контактами силовых аппаратов 5;
- своими входами и выходами через типовые устройства 10 вывода дискретных сигналов с вводами силовых аппаратов 5;
- своими входами и выходами через типовые устройства 11 ввода частотных сигналов контроля скорости колесных пар с датчиками частоты вращения колесных пар (на чертеже не показаны);
- своими входами и выходами через типовые устройства 12 ввода аналоговых сигналов от измерительных преобразователей с измерительными преобразователями с аналоговым выходом для контроля основных параметров электрической передачи и дизеля (на чертеже не показаны);
- своими входами и выходами через типовые устройства 13 ввода температурных параметров с выходами температурных датчиков для контроля основных температурных параметров оборудования тепловоза (на чертеже не показаны);
- своими входами и выходами через типовые устройства 14 вывода сигналов управления тиристорными преобразователями с входами управления тиристорных преобразователей для регулирования тока тяговых электродвигателей (на чертеже не показаны);
а также соединен своими входами и выходами через многоканальный блок связи 15 с вводом и выводом дисплейного модуля 7 и с вводами и выводами другого оборудованием, например электронным регулятором дизеля (на чертеже не показан), а также с многоканальными блоками связи 15 систем дистанционного управления 6 всех секций тепловоза, при этом многоканальные блоки связи 15 различных секций тепловоза соединены по аппаратно и программно защищенному каналу связи 16 на базе протокола CAN 2.0 B для передачи управляющей информации и многоканальные блоки связи 15 различных секций тепловоза соединены по широковещательному каналу связи 17 на базе сетевого протокола ETHERNET для передачи большого объема диагностической информации в системы управления других секций тепловоза.
Работа системы управления многосекционным тепловозом.
Машинист с помощью задатчика режимов движения 4 определяет ведущую секцию и на контроллере машиниста 3 через систему дистанционного управления 6 ведущей секции и соответствующие каналы многоканальных блоков связи 15 всех секций тепловоза задает для электронных регуляторов дизелей уставку частоты вращения и необходимый уровень мощности дизеля ведущей и ведомых секций тепловоза.
По управляющей программе, установленной в программируемый контроллер 8 системы дистанционного управления 6 ведущей секции, через соответствующие типовые устройства 10 вывода дискретных сигналов с вводами силовых аппаратов 5 включают или выключают силовые аппараты 5 для осуществления сборки силовой схемы тепловоза (на чертеже не показано). Контроль состояния контроллера машиниста 3, задатчика режимов движения 4 и блок-контактов силовых аппаратов 5 производят путем ввода дискретных сигналов в программируемый контроллер 8 через типовые устройства 9 ввода дискретных сигналов. Информация, получаемая программируемым контроллером 8 через типовые устройства 12 ввода аналоговых сигналов от измерительных преобразователей с аналоговыми выходами, позволяет осуществлять контроль основных параметров, например напряжение и токи нагрузки тяговых электродвигателей (на чертеже не показано), всех секций тепловоза, а воздействуя на соответствующие тиристорные преобразователи через типовые устройства 14 вывода сигналов управления тиристорными преобразователями, осуществлять регулирование тока тяговых электродвигателей. Для регулирования тока тяговых электродвигателей используется информация о скорости колесных пар, получаемая вводом в программируемый контроллер 8 через типовые устройства 11 ввода частотных сигналов с датчиков скорости колесных пар с датчиков частоты вращения колесных пар (на чертеже не показаны). Контроль основных температурных параметров оборудования секций тепловоза, например температуры масла, топлива, воды, выпускных газов, производят по показаниям с температурных датчиков, например термопар и/или термометров сопротивления, вводимых в программируемый контроллер 8 через типовые устройства 13 ввода температурных параметров. Вся информация о состоянии оборудования секции тепловоза передается в дисплейные модули 7 пультов управления машиниста 2, причем на дисплейный модуль 7 пульта управления машиниста 2 ведущей секции передается информация со всех секций тепловоза.
На ведомой секции тепловоза режим работы оборудования определяется управляющей информацией, полученной от ведущей секции через многоканальный блок связи 15 системы дистанционного управления 6, а в остальном управление оборудованием секции осуществляется аналогично ведущей секции.
Многоканальный блок связи 15, входящий в состав системы дистанционного управления 6, выполнен с использованием широко распространенных протоколов связи Ethernet и CAN 2.0 B, причем канал связи 17, обеспечивающий передачу большого объема информации на дисплейный модуль 7 ведущей секции, выполнен на базе сетевого протокола Ethernet, а канал связи 16, обеспечивающий передачу управляющей информации с ведущей на ведомые секции, в связи с необходимостью обеспечения высокой достоверности передачи и аппаратной надежности выполнен на базе аппаратно и программно защищенного канала связи 16 по протоколу CAN 2.0 B.
Реализация предлагаемого технического решения позволяет обеспечить полную аппаратную унификацию схемы управления многосекционным тепловом, поскольку для любого типа тепловоза для работы каналов связи Ethernet и CAN 2.0 B требуется прокладка двух витых пар в экране на каждый канал, т.е. всего 10 проводов. При этом повышается надежность системы управления многосекционным тепловозом при ее упрощении (сокращается на порядок количество проводов в межсекционном соединении), значительно уменьшается стоимость оборудования и облегчаются условия труда локомотивных бригад и обслуживающего персонала за счет упрощения процедуры отключения и подключения каналов связи при разъединении или сочленении секций тепловоза, сокращаются затраты на обслуживание соединительных кабелей и разъемов.
Система управления многосекционным тепловозом реализована и показала хорошие результаты на грузовом тепловозе 3ТЭ116У.
| название | год | авторы | номер документа |
|---|---|---|---|
| Переносной стенд для диагностики микропроцессорной системы управления локомотивом | 2024 |
|
RU2816095C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423252C1 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
| Устройство централизованного контроля,управления и регистрации диагностической информации многосекционных локомотивов железнодорожного транспорта | 1982 |
|
SU1104041A1 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| СИСТЕМА ДЛЯ ПЕРЕДВИЖЕНИЯ И ЭНЕРГОСНАБЖЕНИЯ ТЯЖЕЛЫХ ПУТЕВЫХ МАШИН НА ЖЕЛЕЗНОДОРОЖНОМ ХОДУ | 1996 |
|
RU2099209C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2520837C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
Изобретение относится к области управления сочлененными транспортными средствами с электротягой. Система управления многосекционным тепловозом содержит пульт управления машиниста с дисплейным модулем, контроллер машиниста с задатчиком режимов движения, силовые аппараты и систему дистанционного управления, включающую программируемый контроллер и типовые логические элементы. Программируемый контроллер соединен через устройства ввода дискретных сигналов с контроллером машиниста, задатчиком режимов движения, блок-контактами силовых аппаратов, через устройства вывода дискретных сигналов с вводами силовых аппаратов, через устройства ввода частотных сигналов контроля скорости колесных пар с датчиками частоты вращения колесных пар, через устройства ввода аналоговых сигналов с измерительными преобразователями с аналоговым выходом, через устройства ввода температурных параметров с выходами температурных датчиков, через устройства вывода сигналов управления тиристорными преобразователями с входами управления тиристорных преобразователей. Программируемый контроллер также соединен через многоканальный блок связи с дисплейным модулем, а также с многоканальными блоками связи всех секций тепловоза по каналу связи на базе протокола CAN 2.0 B. Для передачи управляющей информации многоканальные блоки связи различных секций тепловоза соединены по каналу связи на базе сетевого протокола ETHERNET. Технический результат изобретения состоит в повышении надежности работы системы управления тепловозом, унификации и упрощении схемы управления. 1 ил.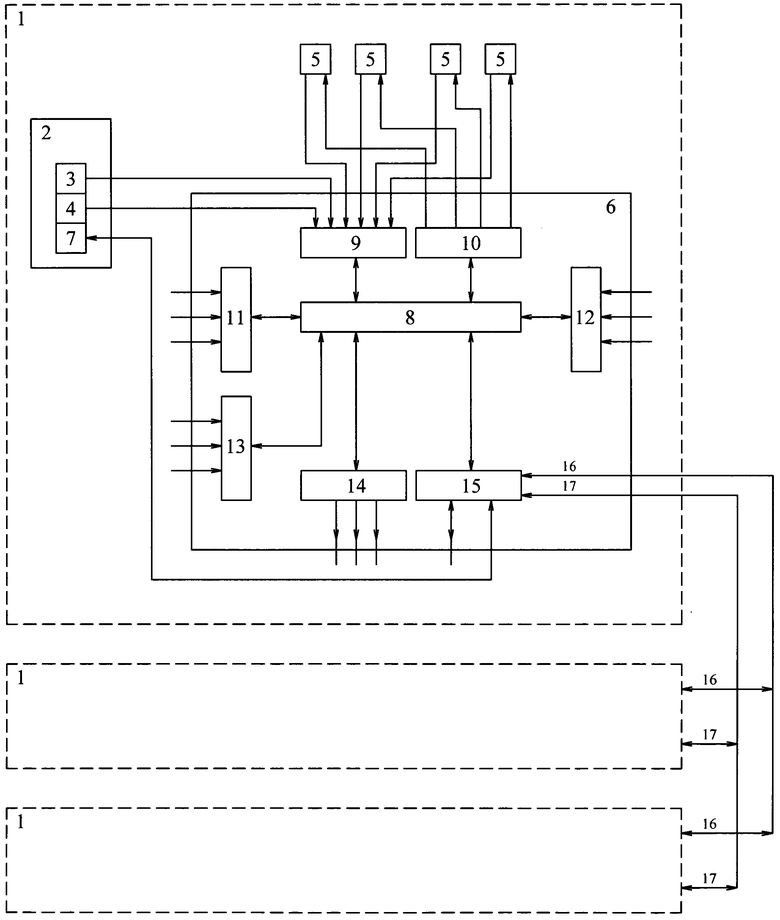
Система управления многосекционным тепловозом, содержащая в каждой секции пульт управления машиниста, контроллер машиниста с задатчиком режимов движения, силовые аппараты и систему дистанционного управления, выполненную на типовых логических элементах, отличающаяся тем, что пульт управления машиниста снабжен дисплейным модулем, а система дистанционного управления снабжена программируемым контроллером и типовыми логическими элементами, выполненными в виде типовых устройств ввода дискретных сигналов контроля состояния контроллера машиниста, задатчика режимов движения, блок-контактов силовых аппаратов, в виде типовых устройств вывода дискретных сигналов управления силовыми аппаратами, в виде типовых устройств ввода частотных сигналов скорости колесных пар, в виде типовых устройств ввода аналоговых сигналов измерительных преобразователей с аналоговыми выходами, в виде типовых устройств ввода температурных параметров от температурных датчиков, в виде типовых устройств вывода сигналов управления тиристорными преобразователями, а также снабжена многоканальным блоком связи, при этом программируемый контроллер соединен:
- своими входами и выходами через типовые устройства ввода дискретных сигналов с контроллером машиниста, задатчиком режимов движения, блок-контактами силовых аппаратов,
- своими входами и выходами через типовые устройства вывода дискретных сигналов с вводами силовых аппаратов,
- своими входами и выходами через типовые устройства ввода частотных сигналов контроля скорости колесных пар с датчиками частоты вращения колесных пар,
- своими входами и выходами через типовые устройства ввода аналоговых сигналов с измерительными преобразователями с аналоговым выходом,
- своими входами и выходами через типовые устройства ввода температурных параметров с выходами температурных датчиков,
- своими входами и выходами через типовые устройства вывода сигналов управления тиристорными преобразователями с входами управления тиристорных преобразователей,
а также соединен своими входами и выходами через многоканальный блок связи с вводом и выводом дисплейного модуля и с вводами, выводами другого оборудования, а также с вводами и выводами многоканальных блоков связи систем дистанционного управления всех секций тепловоза, при этом многоканальные блоки связи различных секций тепловоза соединены по аппаратно и программно защищенному каналу связи на базе протокола CAN 2.0B для передачи управляющей информации и многоканальные блоки связи различных секций тепловоза соединены по широковещательному каналу связи на базе сетевого протокола ETHERNET для передачи большого объема диагностической информации в системы управления других секций тепловоза.
| Способ получения покрывных красок для кожи | 1959 |
|
SU127345A1 |
| US 2012316707 A1, 13.12.2012 | |||
| БЕЗРЕЛЕЙНАЯ СХЕМА ЦЕПЕЙ УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 2009 |
|
RU2405687C1 |
| US 2013261842 A1, 03.10.2013 | |||
| CN 103434417 A, 11.12.2013 | |||

