ков мультиплексирования, а вторые входы и выходы через межсекционный соединитель - к вторым входам и выходам соответственно другой секции, вторые выходы лереключателя управления режимами, вторые входы и выходы блоков управления накопителем каждой секции подключены к входам и выходам накопителя.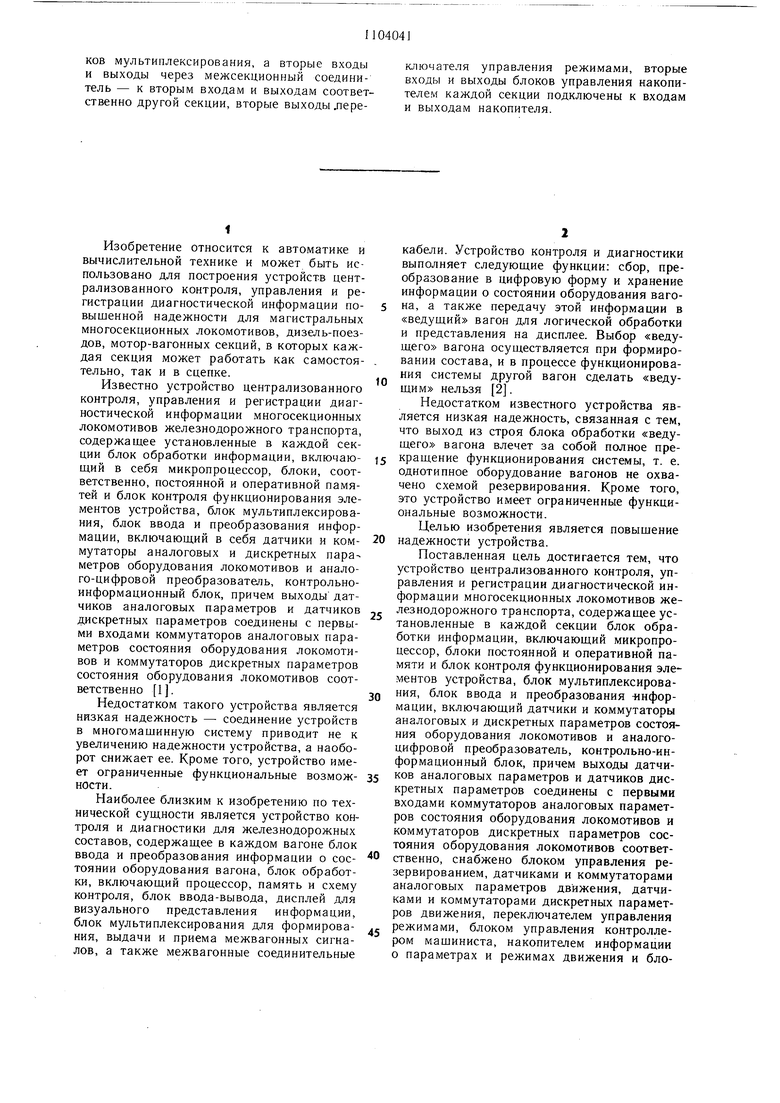


| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ МНОГОСЕКЦИОННЫМ ТЕПЛОВОЗОМ | 2013 |
|
RU2546049C1 |
| Переносной стенд для диагностики микропроцессорной системы управления локомотивом | 2024 |
|
RU2816095C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ПОЖАРНОЙ СИГНАЛИЗАЦИИ И ПОЖАРОТУШЕНИЯ | 2023 |
|
RU2813221C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ СООБЩЕНИЙ В МИКРОПРОЦЕССОРНЫХ СИСТЕМАХ УПРАВЛЕНИЯ И ДИАГНОСТИКИ | 2015 |
|
RU2577196C1 |
| Программно-аппаратный комплекс технических средств пожарной автоматики и охранной сигнализации для подвижных транспортных средств | 2024 |
|
RU2837031C1 |
| Устройство контроля плотности тормозной магистрали железнодорожного транспортного средства | 2023 |
|
RU2816390C1 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| ТЕХНОЛОГИЯ ОРГАНИЗАЦИИ ЦИФРОВОГО РАДИОКАНАЛА ПЕРЕДАЧИ ДАННЫХ ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2419569C1 |
| РЕГИСТРАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ТЕПЛОВОЗА | 2017 |
|
RU2674728C1 |


УСТРОЙСТВО ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ, УПРАВЛЕНИЯ И РЕГИСТРАЦИИ ДИАГНОСТИЧЕСКОЙ ИНФОРМАЦИИ МНОГОСЕКЦИОННЫХ ЛОКОМОТИВОВ ЖЕЛЕЗНОДОРОЖНОТО ТРАНСПОРТА, содержащее установленные в каждой секции блок обработки информации, включающий микропроцессор, блоки постоянной и оперативной памяти и блок контроля функционирования элементов устройства, блок мультиплексирования, блок ввода и переработки информации, включающий датчики и коммутаторы аналоговых и дискретных параметров состояния оборудования локомотивов и аналого-цифровой преобразователь, контрольно-информационный блок, причем выходы датчиков аналоговых параметров и датчиков дискретных параметров соединены с первыми входами коммутаторов аналоговых параметров состояния оборудования локомотивов и коммутаторов дискретных параметров состояния оборудования локомотивов соответственно, отличающееся тем, что, с целью повышения надежности, оно снабжено блоком управления резервированием, датчиками и коммутаторами аналоговых параметров движения, датчиками и коммутаторами дискретных параметров движения, переключателем управления режимами, блоком управления контроллером мащиниста, накопителем информации о параметрах и режимах движения и блоком управления накопителем, причем входы датчиков аналоговых параметров движения соединены с входами коммутаторов аналоговых параметров движения и с вторыми входами коммутаторов аналоговых параметров состояния оборудования, а выходы датчиков дискретных параметров движения - с входами коммутаторов дискретных параметров движения и вторыми входами коммутаторов дискретных параметров состояния оборудования, выходы коммутаторов аналоговых параметров состояния оборудования и коммутаторов аналоговых параметров движения и входы аналого-цифровых преобразователей подключены через межсекционный соединитель соответственно к выходам коммутаторов аналоговых параметров состояния оборудования и коммутаторов аналоговых параметров движения и входам аналоi го-цифровых преобразователей другой секции, выходы и управляющие входы коммута(Л торов аналоговых и дискретных параметров состояния оборудования и коммутаторов аналоговых и дискретных параметров движения, аналого-цифровых преобразователей, выходы блоков мультиплексирования и первые выходы переключателя управления режимами, входы контрольно-информационного блока и блоков управления контроллером машиниста, первые входы и выходы блоков управления накопителем подключены через межсекционный соединитель соответ ственно к выходам и управляющим входам о 4 коммутаторов аналоговых и дискретных параметров состояния оборудования и коммутаторов аналоговых и дискретных параметров движения, аналого-цифровых преобразователей - к выходам блоков мультиплексирования и первым выходам переключателя управления режимами, к входам контрольноинформационного блока и блокам управления контроллером машиниста, к первым вхо дам и выходам блоков управления накопителем другой секции, выходы блоков контроля соединены с первыми входами блоков управления резервированием, первые выходы которых подключены к первым входам бло
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для построения устройств централизованного контроля, управления и регистрации диагностической информации повышенной надежности для магистральных многосекционных локомотивов, дизель-поездов, мотор-вагонных секций, в которых каждая секция может работать как самостоятельно, так и в сцепке.
Известно устройство централизованного контроля, управления и регистрации диагностической информации многосекционных локомотивов железнодорожного транспорта, содержащее установленные в каждой секции блок обработки информации, включаюодий в себя микропроцессор, блоки, соответственно, постоянной и оперативной памятей и блок контроля функционирования элементов устройства, блок мультиплексирования, блок ввода и преобразования информации, включающий в себя датчики и коммутаторы аналоговых и дискретных параметров оборудования локомотивов и аналого-цифровой преобразователь, контрольноинформационный блок, причем выходы датчиков аналоговых параметров и датчиков дискретных параметров соединены с первыми входами коммутаторов аналоговых параметров состояния оборудования локомотивов и коммутаторов дискретных параметров состояния оборудования локомотивов соответственно 1.
Недостатком такого устройства является низкая надежность - соединение устройств в многомашинную систему приводит не к увеличению надежности устройства, а наоборот снижает ее. Кроме того, устройство имеет ограниченные функциональные возможнести.
Наиболее близким к изобретению по технической сущности является устройство контроля и диагностики для железнодорожных составов, содержащее в каждом вагоне блок ввода и преобразования информации о соетоянии оборудования вагона, блок обработки, включающий процессор, память и схему контроля, блок ввода-вывода, дисплей для визуального представления информации, блок мультиплексирования для формирования, выдачи и приема межвагонных сигналов, а также межвагонные соединительные
кабели. Устройство контроля и диагностики выполняет следующие функции; сбор, преобразование в цифровую форму и хранение информации о состоянии оборудования вагона, а также передачу этой информации в «ведущий вагон для логической обработки и представления на дисплее. Выбор «ведущего вагона осуществляется при формировании состава, и в процессе функционирования системы другой вагон сделать «ведущим нельзя 2.
Недостатком известного устройства является низкая надежность, связанная с тем, что выход из строя блока обработки «ведущего вагона влечет за собой полное прекращение функционирования системы, т. е. однотипное оборудование вагонов не охвачено схемой резервирования. Кроме того, это устройство имеет ограниченные функциональные возможности.
Целью изобретения является повыщение надежности устройства.
Поставленная цель достигается тем, что устройство централизованного контроля, управления и регистрации диагностической информации многосекционных локомотивов железнодорожного транспорта, содержащее установленные в каждой секции блок обработки информации, включающий микропроцессор, блоки постоянной и оперативной памяти и блок контроля функционирования элементов устройства, блок мультиплексирования, блок ввода и преобразования информации, включающий датчики и коммутаторы аналоговых и дискретных параметров состояния оборудования локомотивов и аналогоцифровой преобразователь, контрольно-информационный блок, причем выходы датчиков аналоговых параметров и датчиков дискретных параметров соединены с первыми входами коммутаторов аналоговых параметров состояния оборудования локомотивов и коммутаторов дискретных параметров состояния оборудования локомотивов соответственно, снабжено блоком управления резервированием, датчиками и коммутаторами аналоговых параметров движения, датчиками и коммутаторами дискретных параметров движения, переключателем управления режимами, блоком управления контроллером мащиниста, накопителем информации о параметрах и режимах движения и блоком управления накопителем, причем входы датчиков аналоговых параметров движения соединены с входами коммутаторов аналоговых параметров движения и с вторыми входами коммутаторов аналоговых параметров состояния оборудования, а выходы датчиков дискретных параметров движения - с входами коммутаторов дискретных параметров движения и вторыми входами коммутаторов дискретных параметров состояния оборудования, выходы коммутаторов аналоговых параметров состояния оборудования и коммутаторов аналоговых параметров движения и входы аналого-цифровых преобразователей подключены через межсекционный соединитель соответственно к выходам коммутаторов аналоговых параметров состояния оборудования и коммутаторов аналоговых параметров движения и входам аналого-цифровых преобразователей другой секции, выходы и управляющие входы коммутаторов аналоговых и дискретных параметров состояния оборудования и коммутаторов аналоговых и дискретных параметров движения, аналого-цифровых преобразователей, выходы блоков мультиплексирования и первые выходы переключателя управления режимами, входы контрольно-информационного блока и блоков управления контроллером машиниста, первые входы и выходы блоков управления накопителем подключены через межсекционный соединитель соответственно к выходам и управляющим входам коммутаторов аналоговых и дискретных параметров состояния оборудования и коммутаторов аналоговых и дискретных параметров движения, аналого-цифровых преобразователей - к выходам блоков мультиплексирования и первым выходам переключателя управления режимами, к входам контрольно-информационного блока и блокам управления контроллером машиниста, к первым входам и выходам блоков управления накопителем другой секции, выходы блоков контроля соединены с первыми входами блоков управления резервированием, первые выходы которых подключены к первым входам блоков мультиплексирования, а вторые входы и выходы подключены через межсекционный соединитель к вторым входам и выходам соответственно другой секции, вторые выходы переключателя управления режимами, вторые входы и выходы блоков управления накопителем каждой секции подключены к входам и выходам накопителя.
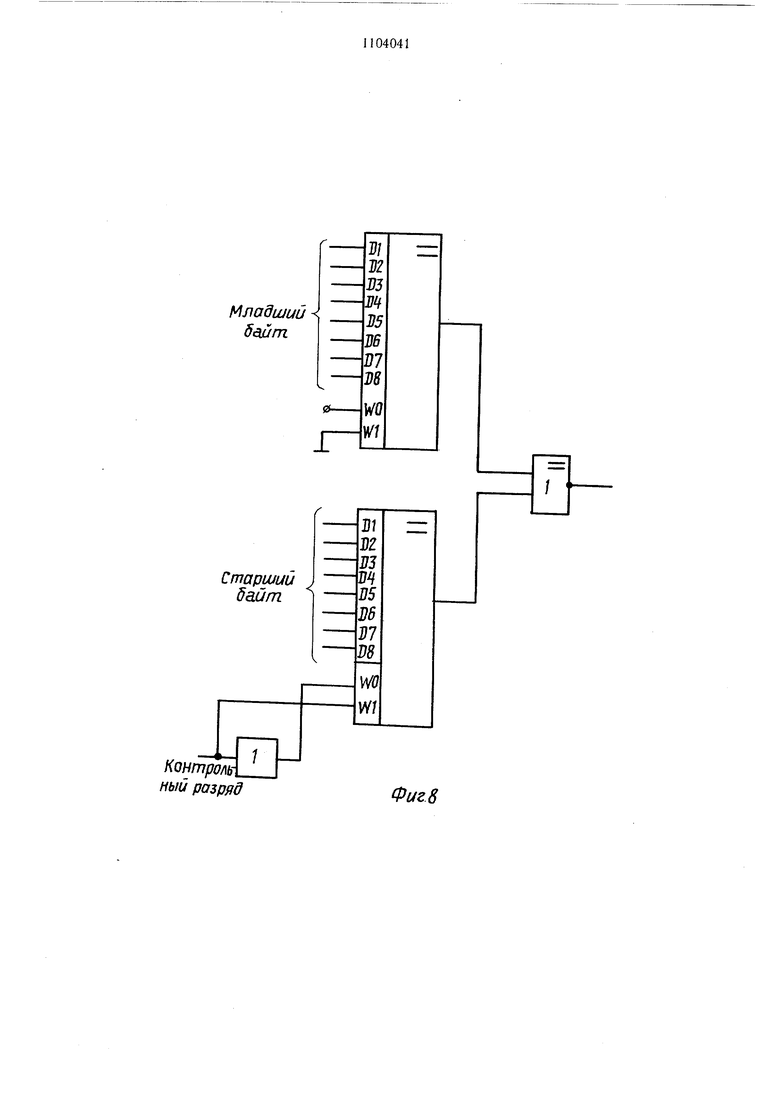
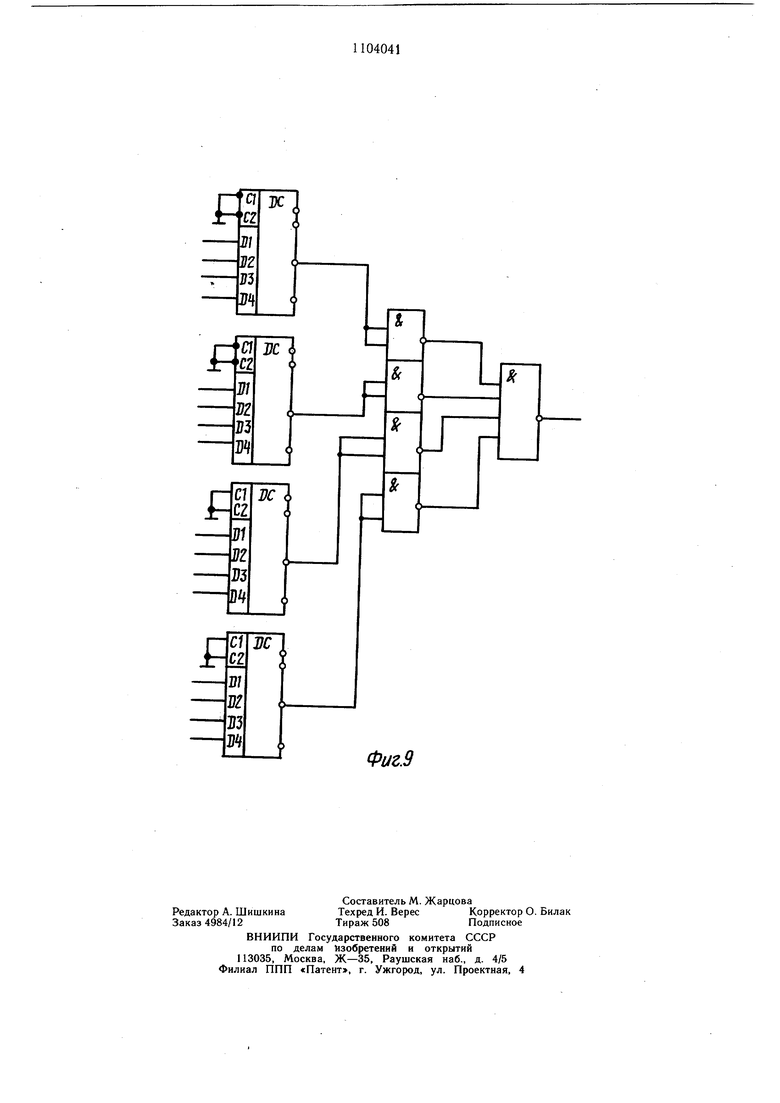
На фиг. 1 представлена схема предлагаемого устройства; на фиг. 2 - схема блока мультиплексирования; на фиг. 3 - схема блока управления накопителем; ha фиг. 4 - схема блока управления контроллером машиниста; на фиг. 5 - схема контроля; на фиг. 6 - схема управления резервированием; на фиг. 7 - схема, реализующая алгоритм резервирования; на фиг. 8 - пример реализации схемы контроля по четности; на фиг. 9 - пример реализации дешифратора кода ощибки.
5 Предлагаемое устройство (фиг. 1) состоит из секций 1, каждая из которых содержит блок 2 обработки информации, блок 3 мультиплексирования, блок 4 ввода и преобразования информации, переключатель 5 управления режимами, блок 6 управления накопителем, блок 7 управления контроллером машиниста, контрольно-информационный блок 8, межсекционного соединителя 9, накопителя 10 информации о параметрах и режимах движения. Блок обработки вклю5 чает в себя микропроцессор 11, блок 12 постоянной памяти, блок 13 оперативной памяти, блок 14 контроля, блок 15 управления резервированием.
Постоянная память 12 предназначена для 0 хранения программ работы микропроцессора 11, а также констант и уставок. Оперативная память 13 предназначена для хранения рабочей информации в процессе ее обработки. Блок 14 контроля предназначен для обнаружения ошибок, сбоев и неисправностей в работе устройства, блок управления резервированием для переключения на резерв в случае обнаружения неисправности «ведущей секции.
Q Блок ввода и преобразования информации включает датчики 16 аналоговых параметров состояния оборудования, датчики 17 аналоговых параметров движения, коммутатор 18 аналоговых параметров состояния оборудования, коммутатор 19 аналоговых
5 параметров движения, аналого-цифровой преобразователь 20, датчики 21 дискретных параметров состояния оборудования, датчики 22 дискретных параметров движения, коммутатор 23 дискретных параметров состояния оборудования, коммутатор 24 дис0 кретных параметров движения.
Блок 3 мультиплексирования (фиг. 2) предназначен для организации двунаправленного обмена между блоком обработки и остальными блоками устройства и содержит
передаюший регистр 25, приемный регистр 26, схему И 27, магистральные передатчики 28 и магистральные приемники 29.
Блок 4 ввода и преобразования информации предназначен для сбора сигналов о состоянии секции локомотива и параметров
0 движения, преобразования информации в цифровую форму и передачи ее через блок 3 мультиплексирования в блок 2 обработки. Переключатель 5 управления режимами предназначен для ручного ввода служебной информации в блок 2 обработки, переключе5 ния секций и управления межсекционным соединителем 9.
Блок управления накопителем (фиг. 3) предназначен для организации независимого от блока 2 обработки местного управления накопителем 10 и содержит генератор 30 импульсов, счетчик 31, дешифратор 32, оперативную память 33. Генератор 30, счетчик 31, дешифратор 32 предназначены для последовательного формирования адресов оперативной памяти 33. Оперативная память 33 играет роль буфера между блоком 2 обработки и накопителем 10. Запись в оперативную память 33 осуществляется блоком 2 обработки, а считывание - подачей адреса из дешифратора 32.
Блок 7 управления контроллером машиниста (фиг. 4) предназначен для формирования управляющих сигналов на контроллер машиниста, позицией которого определяется режим работы двигательной установки локомотива. Блок управления контроллером машиниста содержит дешифратор 34, коммутатор 35 и усилитель 36. Код управляющего сигнала выдается из блока 2 обработки через блок 3 мультиплексирования, поступает на вход дешифратора 34. Выходы дешифратора 34 управляют коммутатором 35, который коммутирует цепь, определяющую позицию контроллера машиниста. Сигнал в скоммутированной цепи, усиленный усилителем 36, поступает непосредственно на исполнительный механизм, управляющий движением состава.
Накопитель 10 предназначен для регистрации диагностической информации в цифровой форме с возможностью ее последующей обработки в стационарных условиях и представляет собой кассетный накопитель на магнитной ленте (цифровой кассетный магнитофон).
Предлагаемое устройство может работать в следующих режимах: автономная работа секции 1 и работа секций с поблочным резервированием.
В режиме автономной работы секций 1 межсекционный соединитель исключается из схемы устройства сигналом с переключателями 5 управления режимами.
Работа каждой секции осуществляется следующим образом.
Информация о состоянии оборудования состава и параметрах движения собирается блоком 4 ввода и преобразования информации. Через блок 3 мультиплексирования информация поступает в блок 4 и запоминается в оперативной памяти 13. Входная информация обрабатывается микропроцессором 11 по программе, заложенной в постоянной памяти 12. Программа включает в себя поиск и локализацию неисправностей оборудования состава, контроль состояния параметров движения и решение задачи оптимального управления двигательной установкой локомотива. Поиск и локализация неисправностей осуществляются путем анализа информации, поступившей от датчиков
16 и 21. Контроль состояния параметров движения осуществляется путем анализа информации, поступающей от датчиков 17 и 22. После предварительной обработки ин5 формация об оборудовании состава и параметрах движения выдается через блок 3 мультиплексирования и записывается в оперативную память 33 блока 6 управления накопителем. Дальнейшая перезапись информации в накопитель 10 осуществляется парал лельно функционированию блока 2 обработки.
Оптимальное управление движением поезда с целью минимизации расхода топлива осуществляется по следующему алгоритму.
5 Блок 2 обработки методом последовательных приближений находит режим работы двигательной установки, соответствующий .максимальному значению критерия оптималь ности.vi
0 где БД - расход топлива в единицу времени; - коэффициент, пропорциональный частному от деления оставщегося до контрольного пункта пути на оставщееся время хода; и - напряжение на тяговых электродвигателях;
I - суммарный ток тяговых электродвигателей;
V - скорость двигателя поезда. Величины Вм, U, I, V поступают от датQ чиков 16, а величина рассчитывается микропроцессором 11. Определяемый на очередном шаге оптимизации код позиции контроллера машиниста через блок 3 мультиплексирования по магистрали поступает в блок 7 управления контроллером машиниста, который вырабатывает сигнал на изменение работы двигательной установки.
В режиме работы секций с поблочным резервирование.м блоки, входящие в состав секций 1, благодаря наличию межсекционных связей, охвачены схемой резервирования, повышающей отказоустойчивость устройства. Резервирование охватывает канал ввода важнейших параметров (которыми являются параметры движения), включающий коммутаторы 19 и 24 и аналого-цифровой преобразователь 20. Сигналы от датчиков 17 поступают как на коммутатор 18, так и на коммутатор 19, а сигналы от датчиков 22 поступают на коммутаторы 23 и 24, благодаря чему достигается устойчивость к отказам коммутаторов 19 и 24 параметров Q движения. Резервирование блоков, непосредственно выполняющих функции контроля, управления и регистрации, достигается введением блоков в состав каждой секции 1 и обеспечением связей между блоками различных секций посредством межсек5 ционного соединителя 9.
Важнейшим блоком, определяющим надежность секции 1 и всего устройства, является блок 2 обработки. В режиме работы
с поблочным резервированием одна из секций 1 при формировании состава выбирается в качестве «ведущей, а блок 2 обработки, входящий в ее состав, выполняет функции по обработке информации, поступающей из всех секций 1. Блок 2 обработки секции 1, не являющейся «ведущей, находится в резерве. Схема 15 управления резервированием в «ведущей секции выдает разрещающий сигнал на прохождение информации через блок 3 мультиплексирования «ведущей секции и запрещает прохождение сигналов через блоки 3 остальных секций. Исправность «ведущей секции контролируется схемой 14 контроля.
Схема 14 контроля (фиг. 5) представляет собой совокупность средств, реализующих аппаратно-программные методы контроля исправности блоков секции 1. Схема 14 контроля включает в себя постоянную память 37 для хранения тестовых программ, которая представляет собой зону адресов постоянной памяти 12, генератор 38 импульсов, счетчик 39, схему 40 контроля четности, дещифратор 41 кода ощибки, схему ИЛИ 42, триггер 43. Счетчик 39 предназначен для контроля правильности прохождения программ. В постоянной памяти 12 выбираются контрольные точки. При прохождении любой из них счетчик 39 обнуляется и начинает считать импульсы, вырабатываемые генератором 38. Если до прохождения следующей контрольной точки счетчик 39 переполняется, это свидетельствует о ненормальном прохождении программы.
Схема 40 контроля по четности для 16битового параллельного кода с одним контрольным разрядом (фиг. 8) реализуется микросхемами К155ИП2 - схема свертки на восемь разрядов, К155ЛП5 - ИСКЛЮЧАЮЩЕЕ ИЛИ, К155ЛН1 - НЕ. Дешифратор кода ощибки 2-45 для 16-разрядной магистрали (фиг. 9) реализуется микросхемами К155ИДЗ - дещифратор на четыре входа, К155ЛАЗ - НЕ и К155ЛА1 - И. Все сигналы о сбоях, ощибках и неисправностях объединяются схемой ИЛИ 42, а обобщенный сигнал 44 неисправности выдается потенциалом с выхода триггера 43.
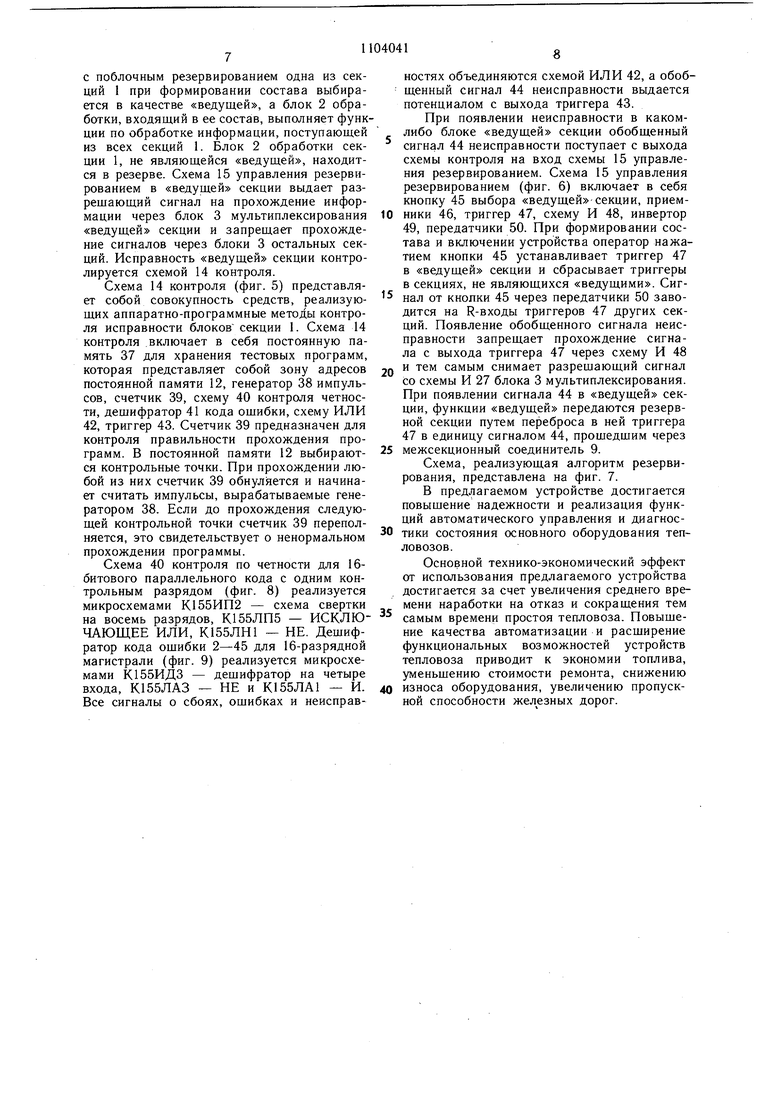
Нри появлении неисправности в какомлибо блоке «ведущей секции обобщенный сигнал 44 неисправности поступает с выхода схемы контроля на вход схемы 15 управления резервированием. Схема 15 управления резервированием (фиг. 6) включает в себя кнопку 45 выбора «ведущей -секции, прием0 НИКИ 46, триггер 47, схему И 48, инвертор 49, передатчики 50. При формировании состава и включении устройства оператор нажатием кнопки 45 устанавливает триггер 47 в «ведущей секции и сбрасывает триггеры в секциях, не являющихся «ведущими. Сиг5 нал от кнопки 45 через передатчики 50 заводится на R-входы триггеров 47 других секций. Появление обобщенного сигнала неисправности запрещает прохождение сигнала с выхода триггера 47 через схему И 48
Q и тем самым снимает разрещающий сигнал со схемы И 27 блока 3 мультиплексирования. При появлении сигнала 44 в «ведущей секции, функции «ведущей передаются резервной секции путем переброса в ней триггера 47 в единицу сигналом 44, прощедщим через
5 межсекционный соединитель 9.
Схема, реализующая алгоритм резервирования, представлена на фиг. 7.
В предлагаемом устройстве достигается повыщение надежности и реализация функций автоматического управления и диагнос0 тики состояния основного оборудования тепловозов.
Основной технико-экономический эффект от использования предлагаемого устройства достигается за счет увеличения среднего времени наработки на отказ и сокращения тем самым времени простоя тепловоза. Повыщение качества автоматизации и расширение функциональных возможностей устройств тепловоза приводит к экономии топлива, уменьшению стоимости ремонта, снижению
износа оборудования, увеличению пропускной способности железных дорог.
«О
Фиг.2
игЛ
8
47
D К
Фиг. 6
uQ
t «o
A / V /Ik
Co
OOOF4
:.
1
«
/ V
V
Младший 5з1цт
Старший байт
КонтролА ный разряд
D1 D2
f/Q W1
JJJ Б2
П Б5
S6 D7
W0 V//
Фиг 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4041470, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
