Изобретение относится к измерительной технике, а именно к оптическим способам измерения параметров вибрации объектов, и может быть использовано в системах машинного зрения для контроля работы механического оборудования, машин, механизмов, при обследовании и оценке технического состояния строительных конструкций и производственных объектов, а также относится к областям биометрии, медицины, психологии, и может быть использовано для получения психофизиологической информации об биологических объектах, в частности человека.
Известно, что вибрация - это механические колебания тела. Самый простой вид вибрации - это колебание или повторяющееся движение объекта около положения равновесия. Этот тип вибрации называется общей вибрацией, потому что тело перемещается как единое целое и все его части имеют одинаковую по величине и направлению скорость.
Колебательное движение твердого тела может быть полностью описано в виде комбинации шести простейших типов движения: поступательного в трех взаимно перпендикулярных направлениях (х, y, z в декартовых координатах) и вращательного относительно трех взаимно перпендикулярных осей (Ox, Oy, Oz). Любое сложное перемещение тела можно разложить на эти шесть составляющих. Поэтому о таких телах говорят, что они имеют шесть степеней свободы.
Известно, что вибрация тела всегда вызывается силами возбуждения. Эти силы могут быть приложены к объекту извне или возникать внутри него самого. Вибрация конкретного объекта полностью определяется силой возбуждения, ее направлением и частотой. Вибрационный анализ позволяет выявить силы возбуждения, например при работе машины. Эти силы зависят от состояния машины, и знание их характеристик и законов взаимодействия позволяет диагностировать дефекты последней.
Известен способ измерения параметров вибрации объекта, включающий закрепление на объекте тест-объекта и регистрацию изображения тест-объекта с вибрационным размытием. При этом в качестве тест-объекта используют миру, выполненную в виде групп параллельных парных штрихов, имеющих общую ось симметрии, с расстоянием между штрихами в группе, равным удвоенной ширине штриха, уменьшающейся от группы штрихов с низкой пространственной частотой к группе штрихов с высокой пространственной частотой. Сначала с помощью видеокамеры формируют на экране монитора компьютера изображение миры для каждой частоты кадровой развертки видеокамеры до получения неподвижного изображения миры с вибрационным размытием и фиксацией соответствующей частоты кадровой развертки видеокамеры, равной частоте вибрации объекта. После чего регистрируют в неподвижном изображении миры с вибрационным размытием нулевой контраст в группе штрихов с наиболее низкой пространственной частотой, в которой ширина штриха равна размаху вибрации объекта (RU2395792).
Недостатками описанного способа являются узкая область применения вследствие необходимости закрепления на объекте измерения тест-объекта, при условии отсутствия перемещения в пространстве самого объекта измерения и постоянстве направления вибраций, т.е. фиксируются простейшие гармонические колебания линейных систем.
Большинство механических систем, конструкций и тем более биологических объектов являются более сложными, чем простая материальная точка, и они совсем не обязательно будут колебаться под воздействием внешней или внутренней силы как единое целое.
Известно, что ни одна реальная система не является абсолютно линейной, т.е. наличие внешней или внутренней возбуждающей силы вызывает множество ответных вибраций. Существует большое разнообразие нелинейностей, которые в той или иной степени присутствуют в любой механической системе, конструкции или биологическом объекте.
Известен способ для получения информации о психофизиологическом состоянии живого объекта, описанный в патенте RU2289310, в котором получают изображение объекта, проецируют изображения на фотоприемное устройство, преобразуют изображения объекта в электрический сигнал с последующей его оцифровкой, обрабатывают межкадровую разницу с помощью ЭВМ. Обработка включает в себя выделение и фиксацию частотной составляющей вибрации живых объектов (прототип).
Недостатками описанного способа являются получение не абсолютных, а относительных параметров частоты вибрации наблюдаемого объекта и невозможность измерения частоты вибраций неживых объектов.
Технический результат предлагаемого изобретения заключается в расширении области применения способа бесконтактного оптического измерения параметров вибрации живых и неживых объектов, повышении точности измерения параметров вибрации.
Заявленный технический результат достигается тем, что в известном способе, выбранном за прототип, дополнительно фиксируют изменения яркости пикселей в последовательных кадрах, устанавливают порог, определяющий величину минимально допустимого различия в яркости пикселя на двух соседних кадрах, при этом если величина яркости на текущем и на предыдущем кадрах различна и по модулю превышает установленный порог, то в бинарную последовательность записывается «1», в противном случае - «0», определяют частоту колебаний яркости пикселя видеоизображения объекта по количеству «I» в полученной бинарной последовательности. Для накопления информации используют одномерный массив длинной в FPS элементов, каждый из которых представляет собой 1 байт. Значение порога устанавливается в пределах от 1 до 255 байт. Полученные данные о частоте колебаний наблюдаемого объекта представляют в виде гистограммы, по горизонтальной оси которой представлена шкала частот, а по вертикальной оси - количество точек (пикселей), принадлежащих определенной частоте колебаний объекта.
Реализацию предложенного способа осуществляют с помощью стандартных аппаратных средств. На рисунке изображена система, содержащая наблюдаемый объект 1, устройство формирования видеоизображения 2, ЭВМ 3.
Система работает следующим образом.
1. Получение оцифрованного видеоизображения объекта. Изображение объекта фиксируется видеокамерой, например аналоговой, оцифровывается с помощью аналогово-цифрового преобразователя и обрабатывается на ЭВМ с помощью специальной программы.
2. Реализация алгоритма измерения частоты.
Принцип действия алгоритма замера частот основан на утверждении, что последовательное изменение яркости группы соседних точек (пикселей) видеоизображения объекта последовательно в прямом и противоположном направлении является его колебанием.
Алгоритм измерения частоты в предлагаемом способе получения информации о параметрах вибрации точек исследуемого объекта на видеоизображении, реализуется согласно известному способу определения усредненных значений частоты, в котором искомая усредненная частота Jy определяется путем подсчета числа периодов Nx нa заданном интервале времени Т и деления длительности интервала Т на подсчитанное число периодов Nx.

Для замера частоты колебаний яркости одного пикселя берется временной интервал и фиксируется изменение яркости с течением данного отрезка времени, далее производится «бинаризация» последовательности и подсчет количества изменений яркости за известный период времени.
2.1 Фиксация изменения яркости
Для накопления информации об изменении яркости каждого элемента изображения используют одномерный массив длиной в FPS элементов, каждый из которых представляет собой 1 байт (значение от 0 до 255), что позволяет сохранить информацию об изменении яркости в течение 1 секунды.
2.2 Далее проводят процесс бинаризации, который представляет собой приведение массива изменения яркости к бинарному массиву соответствующего размера. Этот процесс осуществляется по следующему алгоритму:
2.2.1 Вводят условие порога, которое регулирует величину, определяющую минимально-допустимое различие в яркости пикселя на двух соседних кадрах. Если яркость изменяется меньше, чем на установленный порог, изменение не фиксируется, в бинарную последовательность ставят «0». Значение порога может быть установлено в пределах от 1 до 255.
2.2.2 Далее определяют направление изменения яркости. Если направления изменения яркости (возрастает / убывает) на текущем и предыдущем кадре различны и величина изменения яркости по модулю превышает порог, то в бинарную последовательность записывают «1», иначе - «0».
В итоге после обработки получают последовательность (пример «00011010101001010»), длина последовательности равна FPS элементов.
2.2.3 Затем определяют частоты колебаний. На основе полученной бинарной последовательности считают частоту колебания яркости пикселя, в частности на представленном примере она равна 7 Гц, и определяется количеством «1» в бинарной последовательности.
3. Отображение информации о частотах
На каждом FPS кадре опрашивают все точки контроля частоты за последние FPS кадров. На основании данных о количестве точек с определенными частотами строят гистограмму, по горизонтальной оси которой представлена шкала частот, а по вертикальной - количество точек «генерирующих» эту частоту.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ВЫДЕЛЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ В ПОСЛЕДОВАТЕЛЬНОСТИ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2311684C1 |
| Способ измерения параметров вибрации объекта | 2019 |
|
RU2713097C1 |
| СИСТЕМА И СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ ПОВЕРХНОСТИ ОБЪЕКТОВ НА БАЗЕ НЕЙРОМОРФНОЙ КАМЕРЫ | 2022 |
|
RU2803076C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2015 |
|
RU2597280C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |
| Способ измерения скорости движения протяженных объектов | 2023 |
|
RU2803031C1 |
| Способ определения скорости по видео | 2017 |
|
RU2695708C2 |
Изобретение относится к измерительной технике, а именно к оптическим способам измерения параметров вибрации объектов. Формируют сигнал видеоизображения исследуемого объекта с помощью видеокамеры, производят последующую оцифровку указанного сигнала с помощью аналогово-цифрового преобразователя, обрабатывают оцифрованное видеоизображение с помощью ЭВМ, получают информацию об абсолютных параметрах вибрации точек исследуемого объекта на видеоизображении. Технический результат - повышение эффективности вибродиагностики, расширение области ее применения и повышение точности измерения параметров вибраций. 2 з.п. ф-лы, 1 ил.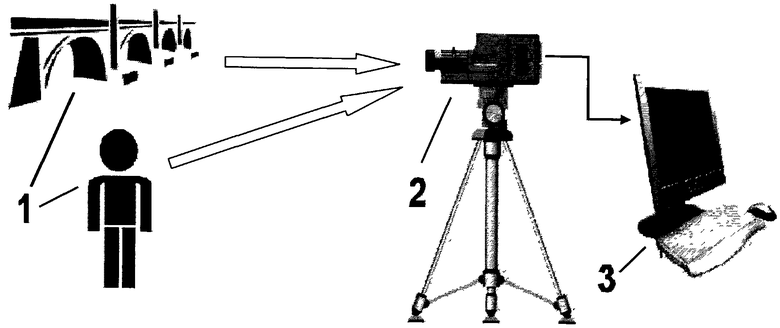
1. Способ бесконтактного оптического измерения параметров вибрации механизмов, конструкций и биологических объектов, заключающийся в получении видеоизображения наблюдаемого объекта с последующей оцифровкой полученного сигнала, обработкой межкадровой разности с помощью ЭВМ, отличающийся тем, что дополнительно фиксируют изменение яркости пикселей в последовательных кадрах видеоизображения, устанавливают порог, определяющий величину минимально допустимого различия в яркости пикселя на двух соседних кадрах, при этом если величина яркости на текущем и на предыдущем кадре различна и по модулю превышает установленный порог, то в бинарную последовательность записывается «1», в противном случае - «0», определяют частоту колебаний яркости пикселя видеоизображения объекта по количеству «1» в полученной бинарной последовательности.
2. Способ по п.1, отличающийся тем, что значение порога устанавливается в пределах от 1 до 255.
3. Способ по п.1, отличающийся тем, что полученные данные о частоте колебаний наблюдаемого объекта представляются в виде гистограммы, по горизонтальной оси которой представлена шкала частот, а по вертикальной оси - количество точек (пикселей), принадлежащих определенной частоте колебаний объекта.
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ПСИХОФИЗИОЛОГИЧЕСКОМ СОСТОЯНИИ ЖИВОГО ОБЪЕКТА | 2004 |
|
RU2289310C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ ОБЪЕКТА | 2009 |
|
RU2395792C1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ | 0 |
|
SU322648A1 |
| WO 2002051154 A1, 27.06.2002 | |||

