ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к области бесконтактных измерительных приборов и может быть использовано в системах машинного зрения для оценки технического состояния оборудования, машин, механизмов, строительных конструкций и производственных объектов и т.д., а также для решения широкого круга задач, связанных с выполнением вибродиагностики оптическим способом.
УРОВЕНЬ ТЕХНИКИ
Одними из важнейших параметров технического состояния оборудования, которое требует контроля, являются параметры периодических перемещений исследуемого объекта в пространстве - вибрации. К этим параметрам относятся амплитуда и частота вибрации.
В отличие от контактных методов измерения параметров вибрации, подразумевающих механическую связь датчика с исследуемым объектом, бесконтактные методы обладают возможностью дистанционного измерения.
Контактные методы обладают целым рядом недостатков, таких как:
- невозможность измерения вибраций высокой частоты и малой амплитуды по причине своей высокой инерционности, приводящей к искажению формы сигнала;
- при небольшой массе исследуемого объекта, датчик может существенно влиять на характер вибрации, что вносит дополнительную ошибку в измерения;
- в случае, когда приходится иметь дело с объектами, работающими при высоких температурах или находящимися в агрессивных внешних средах, прямые методы контактной диагностики могут быть крайне затруднительны в практической реализации;
- информация, получаемая в случае контактной вибродиагностики с использованием датчиков и сенсоров, не может быть достаточной для определения вибрационных характеристик конструкции в целом, вместо этого получаем карту локальных вибраций.
Общим достоинством бесконтактных методов является отсутствие механических воздействий на исследуемый объект и малая инерционность.
Одним из способов бесконтактного измерения вибрации является применение цифровых видеокамер, когда каждый пиксель на конструкции становится точкой измерения. Однако, цифровые видеокамеры основаны на принципе генерации кадров через определенные временные интервалы (время задержки). При таком подходе все пиксели матрицы одновременно выполняют единообразные измерения только в определенный момент времени, что приводит к недополучению информации о наблюдаемом объекте в промежутках между генерацией кадров.
В предлагаемом решении предложена система и способ для бесконтактного измерения параметров вибрации на основе нейроморфной камеры.
Из уровня техники известен источник информации US 20220122638 A1, опубликованный 21.04.2022 г. и раскрывающий способы измерения и визуализации периодических движений элементов конструкций механических систем, включающий видеоустройство для сбора потока видеоданных, систему анализа данных (процессор и память). Разработанное программное обеспечение фильтрует движения на видео до определенной частоты для визуального определения движения элемента конструкции.
Данное решение основывается на использовании сверхвысокоскоростных видеокамер с частотой от 10000 кадров/с и выше при используемом объеме памяти до нескольких десятков ГГб, что позволяет получить максимум до 20 сек видеоряда. Предлагаемое решение использует алгоритмы на базе нейроморфной камеры, которые не ограничены такими жесткими требованиями.
Из уровня техники также известен источник информации WO 2022136510 A1, опубликованный 30.06.2022 г. и раскрывающий устройство для динамического датчика зрения. Устройство включает в себя привод, сконфигурированный для изменения оптического пути света, попадающего на массив пикселей DVS относительно массива пикселей, чтобы заставить массив пикселей обнаружить одно или более событий, возникающих в результате изменения приводом оптического пути света относительно массива пикселей. Кроме того, устройство включает схему управления, сконфигурированную для настройки DVS на основе одного или нескольких событий.
Предлагаемое решение отличается от известных из уровня техники решений тем, что в качестве альтернативы использованию классических видеокамер предполагается использовать асинхронную нейроморфную камеру, позволяющую измерять уровень вибрации в каждой точке всей наблюдаемой поверхности объекта единомоментно, а также не передавать избыточную информацию о статическом фоне.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача, на решение которой направлено заявленное техническое решение, является реализация бесконтактного измерения уровня вибрации всей поверхности оборудования, попадающего в поле зрение нейроморфной камеры.
Технический результат заключается в повышении точности измерения параметров вибрации за счет использования нейроморфной (событийной) камеры. Нейроморфная камера представляет собой асинхронный сенсор, реагирующий на изменение освещенности регистрируемой ей сцены, вызванное вибрацией (элементов) конструкции. Каждый пиксель камеры способен к генерации сигнала независимо от других пикселей в тот момент, когда изменение интенсивности светового потока, падающего на него, превысит установленное пороговое значение. В отличие от широко используемых видеокамер нейроморфные системы видения оказываются устойчивыми к размытию изображения в процессе движения, обеспечивают микросекундную задержку и более высокий динамический диапазон. Дополнительно технический результат заключается в повышении эффективности вибродиагностики и расширении области ее применения.
Заявленный результат достигается за счет осуществления способа бесконтактного измерения параметров вибрации поверхности объектов, содержащий этапы, на которых:
на вычислительное устройство поступают сигналы, сгенерированные пикселями нейроморфной камеры, причем сигналы генерируются в момент времени, соответствующий пространственному смещению поверхности объекта на каждой точке при изменении интенсивности светового потока;
на вычислительном устройстве определяют частоту вибрации каждой точки поверхности объекта посредством определения частоты превышения уровня интенсивности светового потока на заданный порог для одного пикселя путем подсчета количества сигналов, поступивших с определенного пикселя матрицы нейроморфной камеры за заданный временной интервал.
В частном варианте реализации предлагаемого способа, сигнал генерируется, если яркость пикселя больше чем заранее установленный порог.
В другом частном варианте реализации предлагаемого способа, заданный порог для одного пикселя имеет значение, определяющее минимально-допустимое различие между текущим значением яркости пикселя в сравнении с предыдущим значением.
Заявленный результат также достигается за счет осуществления системы бесконтактного измерения параметров вибрации поверхности объектов, содержащей:
нейроморфную камеру,
вычислительное устройство, выполненное с возможностью измерения параметров вибрации поверхности объекта, согласно способу по п. 1.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
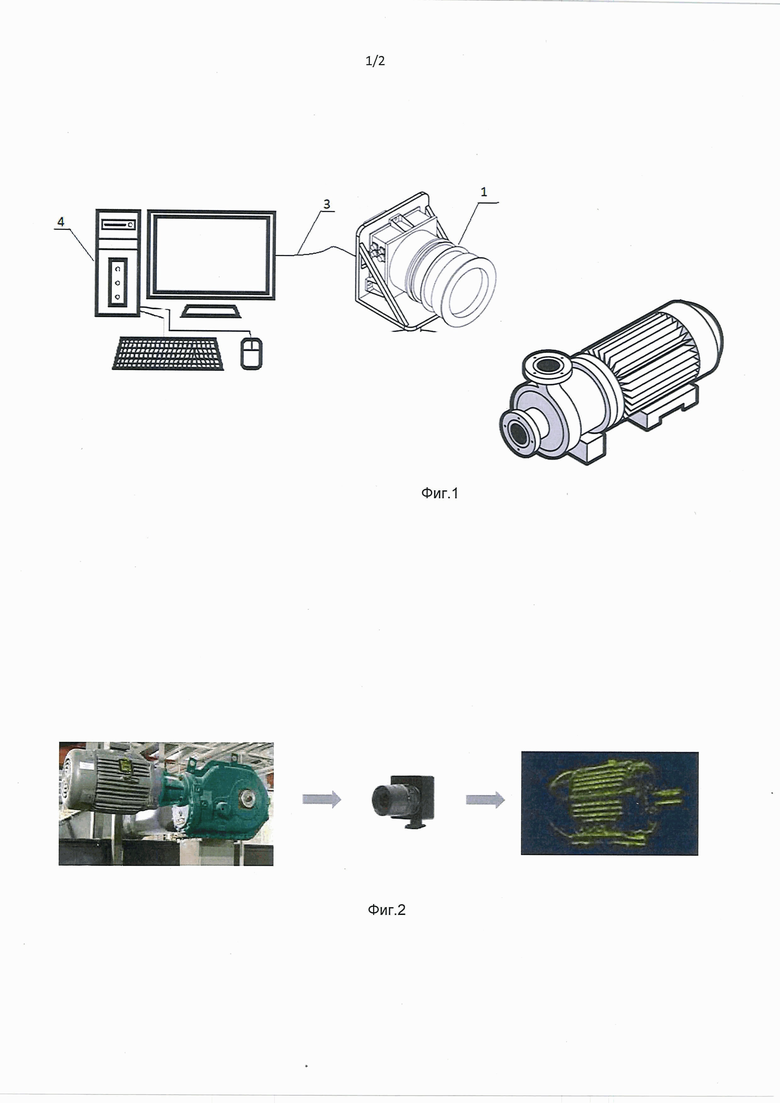
Фиг. 1 иллюстрирует схему измерения вибрации бесконтактным способом с помощью нейроморфной камеры.
Фиг. 2 иллюстрирует схему получения потоков сигналов.
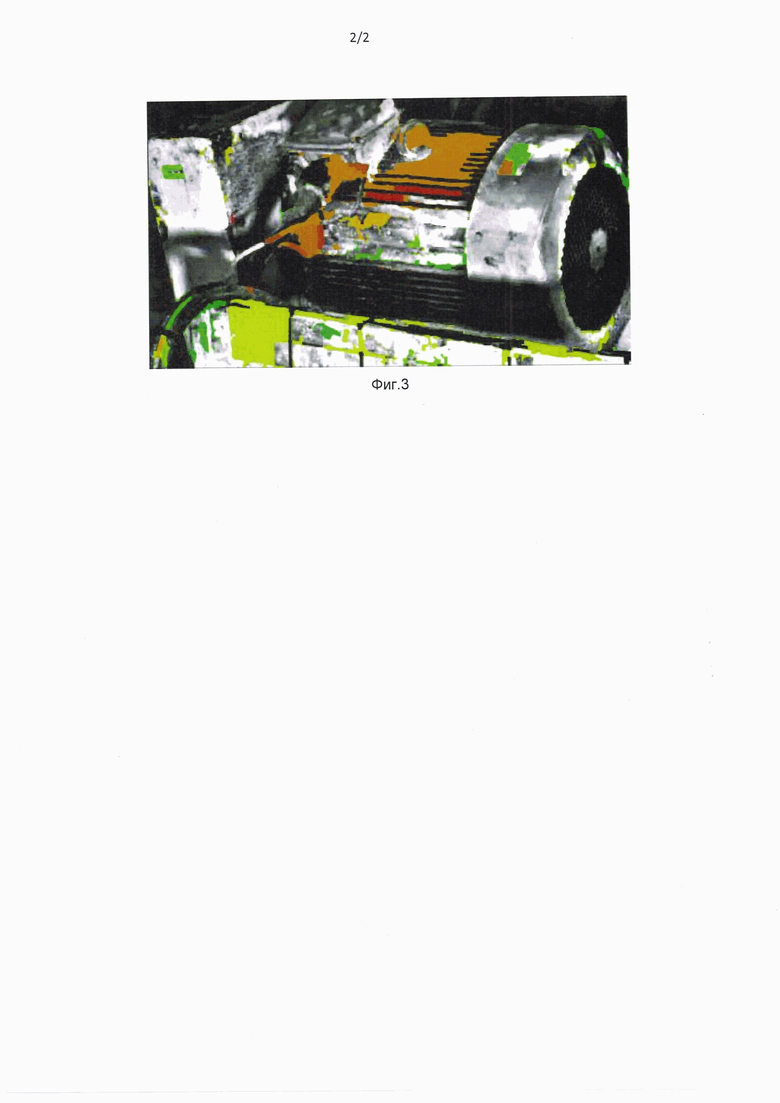
Фиг. 3 иллюстрирует определение частоты вибрации каждой точки поверхности объекта.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
В качестве эффективной альтернативы традиционным видеокамерам на основе кадров, и для решения вышеуказанной проблемы, в предлагаемой системе используется нейроморфная камера, с помощью которой выполняется измерение вибрации по всей поверхности объекта.
Поток событий, генерируемый нейроморфной камерой, является асинхронным и создается каждым пикселем матрицы нейроморфной камеры независимо от других пикселей, что позволяет проводить более точные измерения параметров вибрации. Принцип работы нейроморфной камеры позволяет собирать информацию только о динамических объектах в поле его зрения. Любое событие, связанное с каким-то движением в кадре, вызовет изменение освещенности сцены и будет зарегистрировано таким сенсором. Выходной поток данных содержит координаты пикселя, момент времени, в который было зарегистрировано изменение светового потока, а также характер изменения в форме бинарной переменной, показывающей, увеличилась или уменьшилась освещенность.
Предлагаемая система состоит из нейроморфной камеры (1), интерфейсного кабеля (3) для подключения камеры к вычислительному устройству (4) для обработки сигналов, поступающих с камеры (Фиг. 1).
Способ работы системы бесконтактного измерения уровня вибрации поверхностей, попадающих в поле зрения нейроморфной камеры, следующий:
- Для проведения измерений, объектив нейроморфной камеры направляется на поверхность объекта, вибрацию которого необходимо измерить. В процессе работы, нейроморфная камера фиксирует смещение точек на поверхности объекта.
- В момент времени, соответствующий пространственному смещению на каждой точке поверхности, происходит изменение интенсивности светового потока, которое фиксируется пикселями нейроморфной камеры. Каждый пиксель независимо адаптируется к принимаемому световому сигналу, выбирает свою собственную рабочую точку и измеряет в логарифмической шкале степень изменения освещенности сцены, что гарантирует высокий динамический диапазон. Каждый пиксель камеры в момент такого события генерирует сигнал, включающий информацию о координатах пикселя, моменте времени освещения сцены и бинарную переменную, несущую информацию об увеличении или уменьшении интенсивности света, зарегистрированную пикселем. На Фиг. 2 проиллюстрирована схема получения потоков сигналов, на которой видно, что желтая граница объекта - это изменение интенсивности света, зарегистрированного пикселями.
- Затем поток сигналов, соответствующий координатам пикселя  , моменту времени
, моменту времени  , в который произошло изменение освещенности сцены
, в который произошло изменение освещенности сцены  , и так называемой полярности
, и так называемой полярности  (бинарная переменная
(бинарная переменная  ) обрабатывается программным комплексом. Выходной сигнал генерируется, когда изменение интенсивности, выраженное в логарифмической шкале
) обрабатывается программным комплексом. Выходной сигнал генерируется, когда изменение интенсивности, выраженное в логарифмической шкале
 ,
,
превосходит некоторое пороговое значение  , которое соответствует чувствительности полупроводникового фотодиода (определяется в процессе изготовления), а
, которое соответствует чувствительности полупроводникового фотодиода (определяется в процессе изготовления), а  - временное интервал, прошедший с момента генерации последнего сигнала. Увеличение интенсивности соответствует
- временное интервал, прошедший с момента генерации последнего сигнала. Увеличение интенсивности соответствует  , то есть
, то есть  ; уменьшение интенсивности -
; уменьшение интенсивности -  , то есть
, то есть  . Программный комплекс по заданному временному интервалу
. Программный комплекс по заданному временному интервалу  подсчитывает количество сигналов, пришедших с определенного пикселя матрицы нейроморфной камеры, что соответствует частоте вибрации (количество сигналов, отнесенное ко времени, в течение которого проводились измерения).
подсчитывает количество сигналов, пришедших с определенного пикселя матрицы нейроморфной камеры, что соответствует частоте вибрации (количество сигналов, отнесенное ко времени, в течение которого проводились измерения).
Реализация алгоритма измерения частоты.
Основная идея, лежащая в основе алгоритма замера частот, заключается в том, что периодическое изменение уровня освещенности точки на поверхности объекта соответствует ее физической частоте колебаний.
Каждый пиксель нейроморфной камеры представляет фотодиод, выполненный с использованием КМОП-технологии и характеризующийся некоторым пороговым значением (измерение значений вибраций с использованием нейроморфной камеры могут проводится в диапазоне от 1 Гц до нескольких кГц). Значение порога задает величину, определяющую минимально-допустимое различие между текущим значением яркости пикселя в сравнении с предыдущим значением. Если яркость изменяется меньше, чем на установленный порог, сигнал не генерируется.
Частота превышения уровня интенсивности светового потока на определенный порог для одного пикселя определяется путем подсчета количества сигналов, поступивших с определенного пикселя матрицы нейроморфной камеры за заданный временной интервал. На Фиг. 3 проиллюстрирован пример, где большее количество сигналов указывает на высокую вибрацию (коричневая область), по сравнению с зеленой областью, где количество сигналов, зафиксированных пикселями нейроморфной камеры, меньше.
Вычислительная система, обеспечивающие обработку данных, необходимую для реализации заявленного решения, в общем случае содержат такие компоненты, как: один или более процессоров, по меньшей мере одну память, средство хранения данных, интерфейсы ввода/вывода, средство ввода, средства сетевого взаимодействия.
При исполнении машиночитаемых команд, содержащихся в оперативно памяти, конфигурируют процессор устройства для выполнения основных вычислительные операции, необходимых для функционирования устройства или функциональности одного, или более его компонентов.
Память, как правило, выполнена в виде ОЗУ, куда загружается необходимая программная логика, обеспечивающая требуемый функционал. При осуществлении работы предлагаемого решения выделяют объем памяти, необходимы для осуществления предлагаемого решения.
Средство хранения данных может выполняться в виде HDD, SSD дисков, рейд массива, сетевого хранилища, флэш-памяти и т.п. Средство позволяет выполнять долгосрочное хранение различного вида информации, например, вышеупомянутых файлов с наборами данных пользователей, базы данных, содержащих записи измеренных для каждого пользователя временных интервалов, идентификаторов пользователей и т.п.
Интерфейсы представляют собой стандартные средства для подключения и работы периферийных и прочих устройств, например, USB, RS232, RJ45, COM, HDMI, PS/2, Lightning и т.п.
Выбор интерфейсов зависит от конкретного исполнения устройства, которое может представлять собой персональный компьютер, мейнфрейм, серверный кластер, тонкий клиент, смартфон, ноутбук и т.п.
В качестве средств ввода данных в любом воплощении системы, реализующей описываемый способ, может использоваться клавиатура. Аппаратное исполнение клавиатуры может быть любым известным: это может быть, как встроенная клавиатура, используемая на ноутбуке или нетбуке, так и обособленное устройство, подключенное к настольному компьютеру, серверу или иному компьютерному устройству. Подключение при этом может быть, как проводным, при котором соединительный кабель клавиатуры подключен к порту PS/2 или USB, расположенному на системном блоке настольного компьютера, так и беспроводным, при котором клавиатура осуществляет обмен данными по каналу беспроводной связи, например, радиоканалу, с базовой станцией, которая, в свою очередь, непосредственно подключена к системному блоку, например, к одному из USB-портов. Помимо клавиатуры в составе средств ввода данных также может использоваться: джойстик, дисплей (сенсорный дисплей), проектор, тачпад, манипулятор, мышь, трекбол, световое перо, динамики, микрофон и т.п.
Средства сетевого взаимодействия выбираются из устройства, обеспечивающий сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п. С помощью средств обеспечивается организация обмена данными по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM.
Компоненты устройства сопряжены посредством общей шины передачи данных.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ВЫБРОСОВ В АТМОСФЕРУ ОТ ПРИРОДНЫХ ПОЖАРОВ | 2014 |
|
RU2578515C2 |
| СПОСОБ БЕСКОНТАКТНОГО ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ МЕХАНИЗМОВ, КОНСТРУКЦИЙ И БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2546714C2 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2018 |
|
RU2702423C1 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЛИЯНИЯ СВЕТА И ЗВУКА НА ЧЕЛОВЕКА | 2014 |
|
RU2667615C2 |
| СПОСОБ МОНИТОРИНГА НАДПОЧВЕННОГО ПОКРОВА ИМПАКТНЫХ РАЙОНОВ АРКТИКИ | 2016 |
|
RU2635823C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИГРЕССИИ НАДПОЧВЕННОГО ПОКРОВА В АРКТИЧЕСКОЙ ЗОНЕ | 2015 |
|
RU2588179C1 |
| Способ измерения скорости движения протяженных объектов | 2023 |
|
RU2803031C1 |
| Устройство автоматического получения и обработки изображений | 2019 |
|
RU2707714C1 |
Группа изобретений относится к области бесконтактных измерительных приборов. Способ бесконтактного измерения параметров вибрации поверхности объектов содержит этапы, на которых: на вычислительное устройство поступают сигналы, сгенерированные пикселями нейроморфной камеры, причем сигналы генерируются в момент времени, соответствующий пространственному смещению поверхности объекта на каждой точке при изменении интенсивности светового потока; на вычислительном устройстве определяют частоту вибрации каждой точки поверхности объекта посредством определения частоты превышения уровня интенсивности светового потока на заданный порог для одного пикселя путем подсчета количества сигналов, поступивших с определенного пикселя матрицы нейроморфной камеры за заданный временной интервал. Технический результат - повышение точности измерения параметров вибрации. 2 н. и 2 з.п. ф-лы, 3 ил.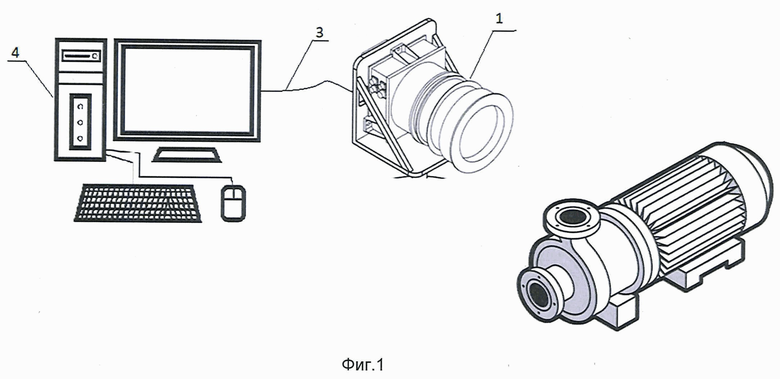
1. Способ бесконтактного измерения параметров вибрации поверхности объектов, содержащий этапы, на которых:
на вычислительное устройство поступают сигналы, сгенерированные пикселями нейроморфной камеры, причем сигналы генерируются в момент времени, соответствующий пространственному смещению поверхности объекта на каждой точке при изменении интенсивности светового потока;
на вычислительном устройстве определяют частоту вибрации каждой точки поверхности объекта посредством определения частоты превышения уровня интенсивности светового потока на заданный порог для одного пикселя путем подсчета количества сигналов, поступивших с определенного пикселя матрицы нейроморфной камеры за заданный временной интервал.
2. Способ по п.1, отличающийся тем, что сигнал генерируется, если яркость пикселя больше, чем заранее установленный порог.
3. Способ по п.1, отличающийся тем, что заданный порог для одного пикселя имеет значение, определяющее минимально-допустимое различие между текущим значением яркости пикселя в сравнении с предыдущим значением.
4. Система бесконтактного измерения параметров вибрации поверхности объектов содержащая:
нейроморфную камеру,
вычислительное устройство, выполненное с возможностью измерения параметров вибрации поверхности объекта согласно способу по п.1.
| СПОСОБ БЕСКОНТАКТНОГО ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ МЕХАНИЗМОВ, КОНСТРУКЦИЙ И БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2011 |
|
RU2546714C2 |
| FR 3060297 A1, 22.06.2018 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ ОБЪЕКТА | 2009 |
|
RU2395792C1 |
| CN 108180975 A, 19.06.2018 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВИБРОАКУСТИЧЕСКОГО АНАЛИЗА ПРОМЫШЛЕННОГО ОБОРУДОВАНИЯ, СОДЕРЖАЩЕГО ВРАЩАЮЩИЕСЯ ЧАСТИ | 2021 |
|
RU2783860C2 |
| CN 110736534 A, 31.01.2020. | |||
