Изобретение относится к области цифровой измерительной техники.
Известны способ и устройство [1] для измерения скорости движения протяженных объектов. В основе одного из способов и реализованного на его основе устройства лежит непрерывное излучение СВЧ-сигнала, прием отраженного от объекта сигнала и его последующая обработка после гомодинного преобразования. Затем осуществляется обработка выборок сигнала с помощью дискретного преобразования Фурье с использованием алгоритма Герцеля, при этом в промежутках между выборками определяют значение промежуточного преобразования выборки сигнала, основная часть вычислений производится в промежутках между выборками, применяют весовую обработку входных данных, суммирование входных данных с наложением во времени, дискретное преобразование Фурье.
Недостатком является низкая функциональная возможность, поскольку измеритель обязательно должен устанавливаться вдоль оси движения объекта и при наличии многих объектов необходимо использовать много измерителей.
Также известен способ [2] осуществления в реальном масштабе времени идентификации и локализации зоны с относительным перемещением в сцене, наблюдаемой системой наблюдения с выходным сигналом, состоящим из цифрового видеосигнала, содержащего последовательность соответствующих кадров, каждый из которых состоит из последовательности строк, каждая из которых состоит из последовательности элементов изображения, и для определения скорости и ориентированного направления перемещения, производится выполнение следующей последовательности операций над цифровым выходным видеосигналом: обработку сглаживания указанного цифрового выходного видеосигнала с использованием цифровой постоянной времени, численное значение которой может изменяться независимо для каждого элемента изображения выходного сигнала, запоминание, с одной стороны, кадра выходного сигнала после сглаживания и, с другой стороны, постоянной времени сглаживания, связанной с указанным кадром, временную обработку для каждого положения элемента изображения, заключающуюся в определении, во-первых, наличия и, во-вторых, амплитуды значимого изменения в амплитуде сигнала элемента изображения между текущим кадром и непосредственно предыдущим сглаженным и запомненным кадром, и в генерировании двух цифровых сигналов, при этом первый сигнал является двоичным, или однобитовым, сигналом с двумя возможными значениями, одно из которых представляет наличие, а другое представляет отсутствие значимого изменения между двумя последовательными кадрами, причем значение указанного двоичного сигнала изменяет запомненное значение указанной постоянной времени, чтобы уменьшить его, если указанный сигнал представляет значимое изменение, и чтобы увеличить его, если указанный сигнал не представляет такого изменения, при этом уменьшение или увеличение осуществляются количественно, тогда как второй цифровой сигнал, т.е. сигнал амплитуды, является многобитовым сигналом с ограниченным числом битов, количественно определяющих амплитуду этого изменения, и пространственную обработку, состоящую из следующих этапов для каждого кадра цифрового выходного видеосигнала: распределяют только значения части элементов изображения в кадре в заданный момент наблюдения (части, которую сканируют по матрице в течение длительности кадра), во-первых, указанного двоичного сигнала, а во-вторых, указанного цифрового сигнала амплитуды, в матрицу с числом рядов и столбцов, которое мало по сравнению с числом строк и числом элементов изображения в строке в видеосигнале, соответственно, чтобы охарактеризовать значения элементов изображения, определяют в этом двойном мгновенном матричном представлении конкретную зону, в которой указанный двоичный сигнал имеет искомое значение, представляющее наличие или отсутствие значимого изменения, а указанный цифровой сигнал амплитуды изменяется или не изменяется на значимую величину для соседних элементов изображения в матрице вдоль ориентированного направления, начиная с исходного элемента изображения, в той же самой части кадра, и поэтому в тот же самый момент наблюдения, и генерируют сигналы, представляющие наличие и локализацию зоны с относительным перемещением и относительную межкадровую скорость и ориентированное направление этого перемещения, если оно есть, относительно окружающей ее среды, исходя из мгновенного матричного распределения упомянутых двух цифровых сигналов - двоичного сигнала и сигнала амплитуды.
Недостатком данного способа является высокая погрешность измерения параметров подвижного протяженного объекта, обусловленная вибрацией видеокамеры, вызванной движением объекта.
Также известен способ [3, 4] измерения параметров движения протяженных объектов, который включает в себя пороговую обработку текущего и предыдущего кадров, а также нахождение разности между уровнями яркости соответствующих пикселей каждого из кадров, после чего выявляются области с наибольшей яркостью, которые несут информацию о смещении протяженного объекта. Среди таких областей выбирается область, произведение высоты и ширины которой наибольшая. По ширине выбранной области вычисляется смещение протяженного объекта за время смены кадров.
Недостатком данного способа является низкая производительность вычислений за счет обработки всего кадра и высокая погрешность измерения параметров протяженного подвижного объекта, обусловленная вибрацией видеокамеры, вызванной движущимся объектом измерения.
Также известен способ [5] измерения параметров движения протяженного объекта со случайным распределением яркостей, основанный на проецировании его изображения на экран приемника излучения, выделении в изображении прямоугольной области и преобразовании элементов изображения в электрические сигналы, пропорциональные яркости изображений в выделенной области, дополнительном выделении второй прямоугольной области, границы которой ориентированы параллельно границам первой области, и получении в каждой из выделенных областей сигналов, пропорциональных средним значениям яркости.
Недостатком данного способа является высокая погрешность измерения, обусловленная вибрацией камеры, вызванной движением объекта.
Также известен способ [6] измерения скорости движения протяженного объекта, основанный на проецировании его изображения на экран приемника излучения (видеокамеры) и преобразовании элементов изображения в электрические сигналы, когда на текущем кадре выделяется прямоугольная область, для которой рассчитывается гистограмма, получаемая путем суммирования уровней яркости пикселей каждого столбца шириной в один пиксель, на последующем кадре выделяется полоса, верхняя и нижняя граница которой соответствует выделенной прямоугольной области текущего кадра с аналогичными координатами верхней и нижней границы, для выделенной полосы также рассчитывается гистограмма, далее внутри выделенной полосы производится поиск правдоподобной эквивалентной прямоугольной области по значению наименьшей суммы квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего кадра и последовательно анализируемых аналогичных областей выделенной полосы последующего кадра, элементы гистограмм представляют собой совокупность столбцов шириной в один пиксель, после чего строится расширенная прямоугольная область вокруг правдоподобной эквивалентной прямоугольной области, в ней выделяется массив аналогичных областей, для которых производится сравнение гистограммы выделенной прямоугольной области текущего кадра и гистограмм аналогичных прямоугольных областей, эквивалентных по размеру выделенной прямоугольной области, если среди эквивалентных прямоугольных областей расширенной прямоугольной области найдена такая прямоугольная область, величина сравнения элементов гистограммы которой меньше результата сравнения гистограммы правдоподобной эквивалентной области, то такая область в свою очередь будет считаться правдоподобной эквивалентной областью, для нее производится новый аналогичный цикл сравнения до тех пор, пока в последующем цикле результаты сравнения не будут иметь худшее совпадение, нежели чем в предыдущем цикле, после чего производится расчет смещения выделенной прямоугольной области относительно эквивалентной правдоподобной области, что соответствует значению смещения изображения протяженного объекта за период следования кадров, найденное значение смещения используется для расчета скорости движения протяженного объекта.
Недостатком данного способа является высокая погрешность измерения при наличии внешних помех (дождь, град, снег, метель), что обусловлено низкой информативностью гистограммы выделенной для анализа прямоугольной области вследствие монотонности изображения анализируемой области. В то же время соседние области изображения объекта могут быть более информативными и обеспечивать более высокую точность измерения.
Наиболее близким по технической сущности к предлагаемому способу является способ [7] измерения скорости движения протяженного объекта, основанный на проецировании его изображения на экран приемника излучения (видеокамеры) и преобразовании элементов изображения в электрические сигналы, когда на текущем кадре выделяется прямоугольная область, для которой рассчитывается гистограмма, получаемая путем суммирования уровней яркости пикселей каждого столбца шириной в один пиксель, на последующем кадре выделяется полоса, верхняя и нижняя граница которой соответствуют выделенной прямоугольной области текущего кадра с аналогичными координатами верхней и нижней границы, для выделенной полосы также рассчитывается гистограмма, далее внутри выделенной полосы производится поиск правдоподобной эквивалентной прямоугольной области по значению наименьшей суммы квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего кадра и последовательно анализируемых аналогичных областей выделенной полосы последующего кадра, элементы гистограмм представляют собой совокупность столбцов шириной в один пиксель, после чего строится расширенная прямоугольная область вокруг правдоподобной эквивалентной прямоугольной области, в ней выделяется массив аналогичных областей, для которых производится сравнение гистограммы выделенной прямоугольной области текущего кадра и гистограмм аналогичных прямоугольных областей, эквивалентных по размеру выделенной прямоугольной области, если среди эквивалентных прямоугольных областей расширенной прямоугольной области найдена такая прямоугольная область, величина сравнения элементов гистограммы которой меньше результата сравнения гистограммы правдоподобной эквивалентной области, то такая область в свою очередь будет считаться правдоподобной эквивалентной областью, для нее производится новый аналогичный цикл сравнения до тех пор, пока в последующем цикле результаты сравнения не будут иметь худшее совпадение, нежели чем в предыдущем цикле, после чего производится расчет смещения выделенной прямоугольной области относительно эквивалентной правдоподобной области, что соответствует значению смещения изображения протяженного объекта за период следования кадров, найденное значение смещения используется для расчета скорости движения протяженного объекта; с целью повышения точности измерения скорости движения протяженного объекта при наличии внешних помех и пониженной информативности вследствие монотонности изображения анализируемой области изображения протяженного объекта, проводится предварительная обработка нескольких анализируемых областей изображения, в к результате которой выбирается наиболее информативная область, которая осуществляется путем того, что на видеоизображении объекта предложено выделить несколько областей, для которых последовательно на дополнительно введенном предварительном этапе рассчитываются гистограммы уровней яркости и производится определение дисперсии гистограмм, область с наибольшей дисперсией гистограммы уровней яркости используется для измерения величины смещения изображения объекта за период следования кадров и расчета скорости движения протяженного объекта по формуле: V = K⋅Δs/τ, где K - постоянный коэффициент, Δs - смещение видеоизображения объекта, а τ - период следования кадров.
Недостатком данного способа является высокая погрешность оценки скорости протяженного объекта при выборе области, содержащей фрагмент фона, а не протяженного объекта, если дисперсия гистограммы уровней яркости для области с фоном выше, чем для области с протяженным объектом.
В основу предлагаемого изобретения поставлена задача повышения точности измерения (обеспечения низкой погрешности измерения) скорости движения протяженного объекта за счет выбора наиболее информативной области с протяженным объектом, а не с фоном. Примечание: эксперименты по измерению скорости вагонов (протяженных объектов) на сортировочной горке станции Кинель Куйбышевской железной дороги показали, что при использовании областей с фоном погрешность оценки скорости минимум на порядок выше, чем при использовании областей с протяженным объектом.
Оптическая ось видеокамеры устанавливается перпендикулярно направлению движения объекта. Направление движения объекта, его начало, положение изображения объекта на кадре видеокамеры - известны. Предлагаемый способ предусматривает измерение скорости движения протяженного объекта в реальном масштабе времени.
Суть измерения скорости движения протяженного объекта сводится к следующему. За период следования кадров τ протяженный объект перемещается на расстояние S, а видеоизображение объекта смещается на Δs. При известном расстоянии до объекта, перемещение объекта будет:

где K - постоянный коэффициент.
По известному смещению видеоизображения Δs можно однозначно определить перемещение S объекта, поскольку коэффициент K будет постоянным для заданной трассы движения объекта при известном расстоянии от видеокамеры до объекта. Скорость движения объекта составит:

Измерение скорости движения объекта сводится к измерению смещения Δs видеоизображения за известное время следования кадров τ.
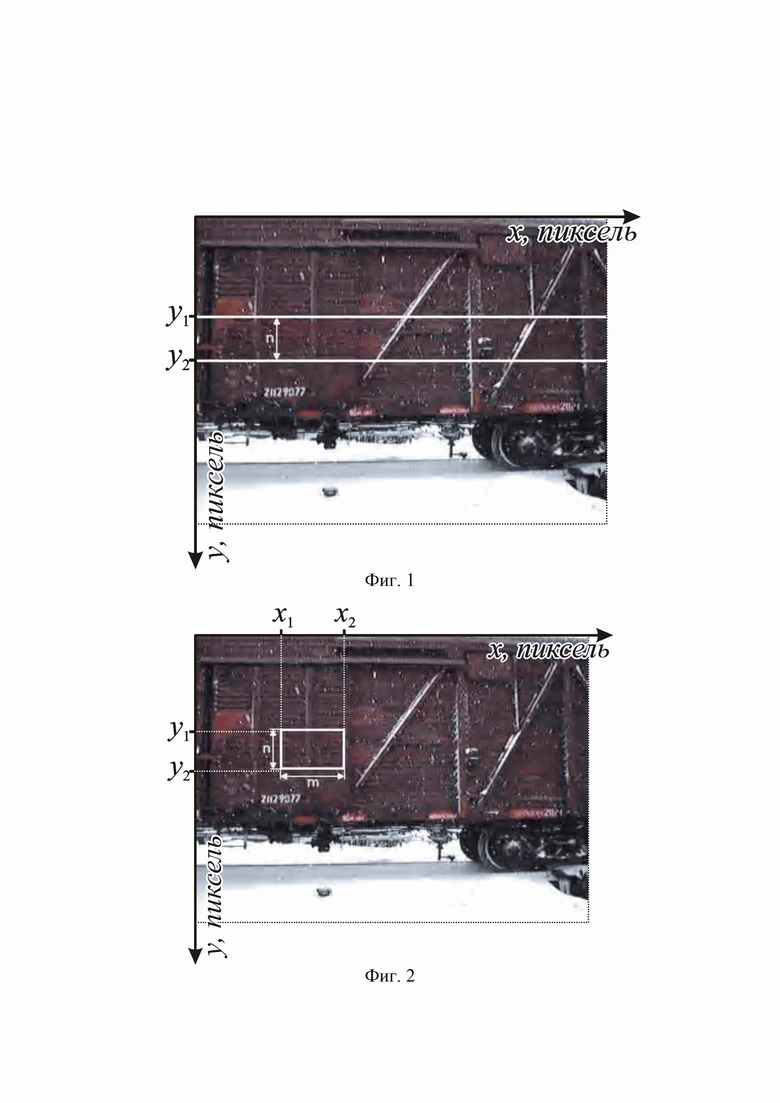
Для определения величины смещения Δs изображения протяженного объекта, например, железнодорожного вагона или другого подвижного объекта, за известное время τ следования кадров видеокамеры, на текущем i-ом кадре выделяется горизонтальная полоса по всей длине кадра, с количеством Х пикселей по длине кадра и высотой n пикселей (фиг. 1).
В этой горизонтальной полосе выделяется прямоугольная область, размер которой составляет m×n, где n - высота прямоугольной области в пикселях, m - длина в пикселях (фиг. 2).
Для выделенной полосы и области m×n рассчитывается гистограмма, получаемая путем суммирования уровней яркости пикселей каждого столбца шириной в один пиксель. Фиг. 3 отображает гистограмму выделенной области m×n на участке полосы примерно от 70 до 120 пикселей.
На следующем i+1 кадре (фиг. 4) вновь выделяется полоса, верхняя и нижняя границы которой соответствуют выделенной прямоугольной области i-ого кадра с аналогичными координатами верхней и нижней границы, то есть выделяется горизонтальная полоса по всей длине кадра, с количеством Х пикселей по длине кадра, и высотой n пикселей.
По всей длине выделенной полосы кадра i+1 также рассчитывается гистограмма суммирования уровней яркости пикселей каждого столбца шириной в один пиксель и высотой в m пикселей (фиг. 5).
Внутри выделенной полосы формируется массив X-m+1 прямоугольных областей шириной m пикселей следующего i+1 кадра, каждая область массива смещена относительно друг друга на один пиксель вправо (фиг. 6).
Далее производится поиск правдоподобной прямоугольной области по значению наименьшей суммы квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего i-го кадра (фиг. 2) и последовательно анализируемыми областями выделенной полосы следующего (i+1)-ого кадра (фиг. 4, 6).

где Q (q) - сумма квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего i-го кадра и последовательно анализируемыми областями выделенной полосы следующего (i+1)-ого кадра;
q - это номер анализируемой прямоугольной области. Номер q соответствует смещению прямоугольной области на (i+1)-ом кадре вдоль оси x относительно прямоугольной области на i-ом кадре (фиг. 7);
d - это номер столбца прямоугольной области (номер элемента в гистограмме);
wi(d) - сумма уровней яркости столбца d прямоугольной области i-ого кадра (значение гистограммы для элемента с номером d).
Минимальное значение Q(q) соответствует прямоугольной области, которая по своим характеристикам наиболее похожа выделенной прямоугольной области на текущем i-м кадре. Такая прямоугольная область названа правдоподобной прямоугольной областью. Гистограмма правдоподобной прямоугольной области выделена на фиг. 5 вертикальными пунктирными линиями.
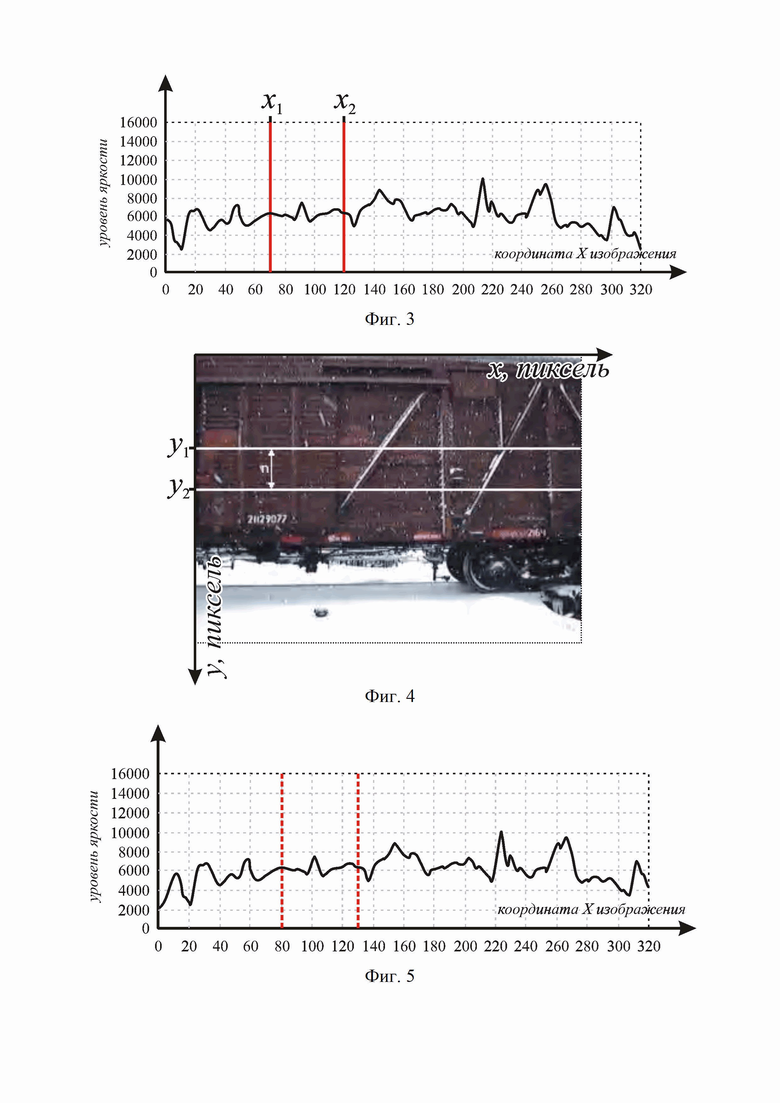
На фиг. 8 представлен график Q(q) для гистограмм i-го кадра и кадра i+1. Минимальное различие гистограммы i-го кадра и последовательно смещаемой гистограммы i+1 кадра соответствует искомому смещению Δs, т.е. наиболее точному совпадению сравниваемых гистограмм, при котором Q(q) будет минимально.
Таким образом, существует смещение (Δs) гистограмм текущего и следующего кадров относительно друг друга, когда различие гистограмм выделенной области текущего и прямоугольной области следующего кадров будет минимальным. Это значение соответствует относительному смещению Δs и будет характеризовать скорость движения объекта.
Из фиг. 8 следует, что смещение Δs составляет 12 пикселей.
Современные цифровые видеокамеры характеризуются высоким разрешением съемки изображений, поэтому оценка смещения с точностью до одного пикселя в большинстве случаев является достаточной для измерения скорости движения.
Для повышения точности измерения скорости движения протяженного объекта при наличии внешних помех (дождь, град, снег, метель) и пониженной информативности анализируемой области протяженного объекта вследствие монотонности изображения в способе [7] измерения скорости предложено введение предварительного этапа, на котором на текущем кадре из нескольких областей изображения выбирается наиболее информативная область. Наиболее информативная область определяется по максимальной дисперсии гистограммы.
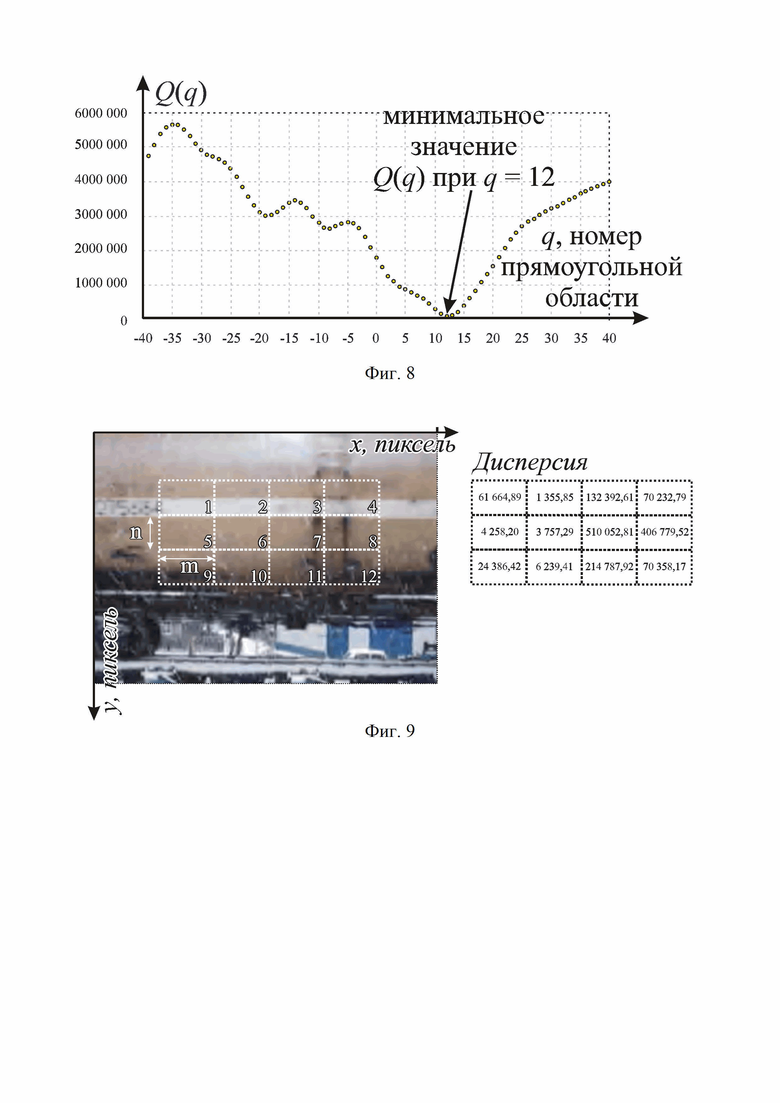
На фиг. 9 показано изображение протяженного объекта с двенадцатью областями. Для каждой области вычисляется гистограмма и дисперсия гистограммы. Области с монотонными изображениями, являющиеся малоинформативными для измерения скорости, характеризуются малой дисперсией и не используются для оценки смещения, а область № 7, являющаяся информативной для измерения скорости, характеризуется максимальной дисперсией и используется для измерения смещения Δs.
Однако выбор наиболее информативной области по максимуму дисперсии гистограммы в ряде случаев приводит к выбору области, содержащей фрагмент фона, а не протяженного объекта. Использование областей с фрагментами фона приводит к высокой погрешности оценки смещения и скорости движения протяженного объекта. Это происходит из-за того, что для выбранной области с фоном на текущем кадре ищется похожая область на следующем кадре, которая в свою очередь также будет содержать фон. Таким образом, использование области с фоном будет определять смещение фона, а не протяженного объекта. То есть, область с фоном будет определять смещение фона. А искомое смещение протяженного объекта может быть оценено только по области с протяженным объектом, а не с фоном.
Эксперименты по измерению скорости вагонов (протяженных объектов) на сортировочной горке станции Кинель Куйбышевской железной дороги показали, что при использовании областей с протяженным объектом погрешность измерения скорости составляет порядка 1% от реальной скорости движения вагона, в то время как при использовании областей с фоном погрешность оценки скорости минимум на порядок выше (10% и выше).
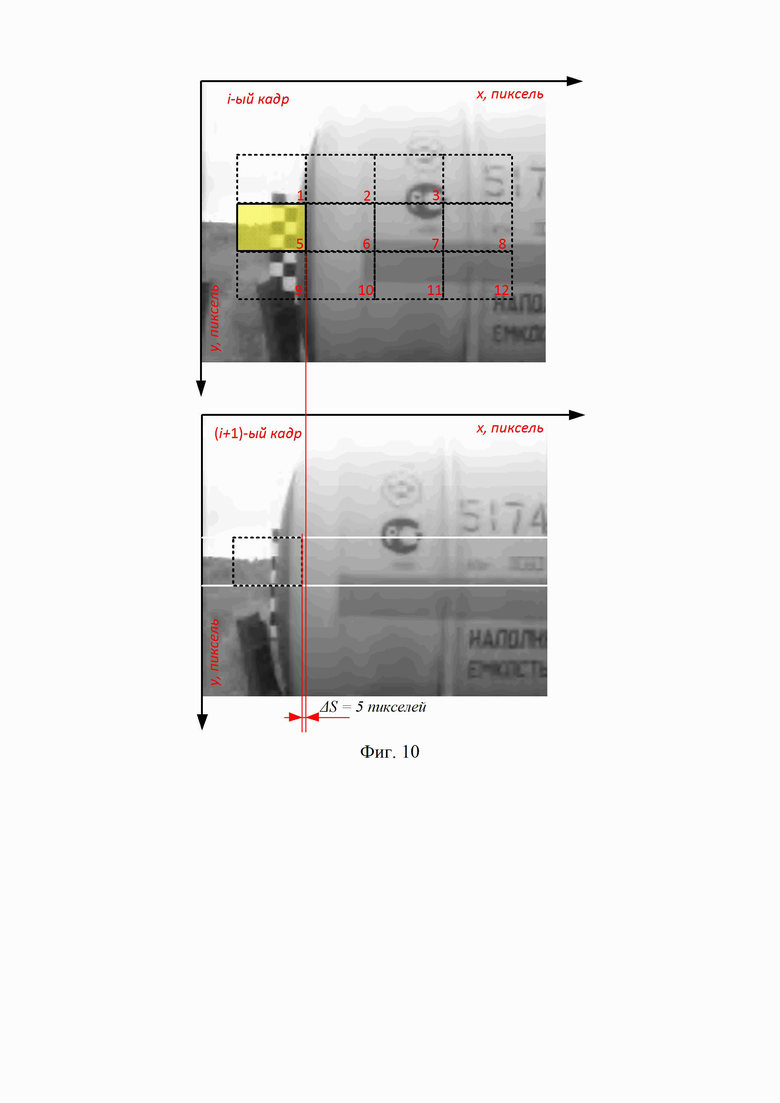
На фиг. 10-13 показаны эти случаи.
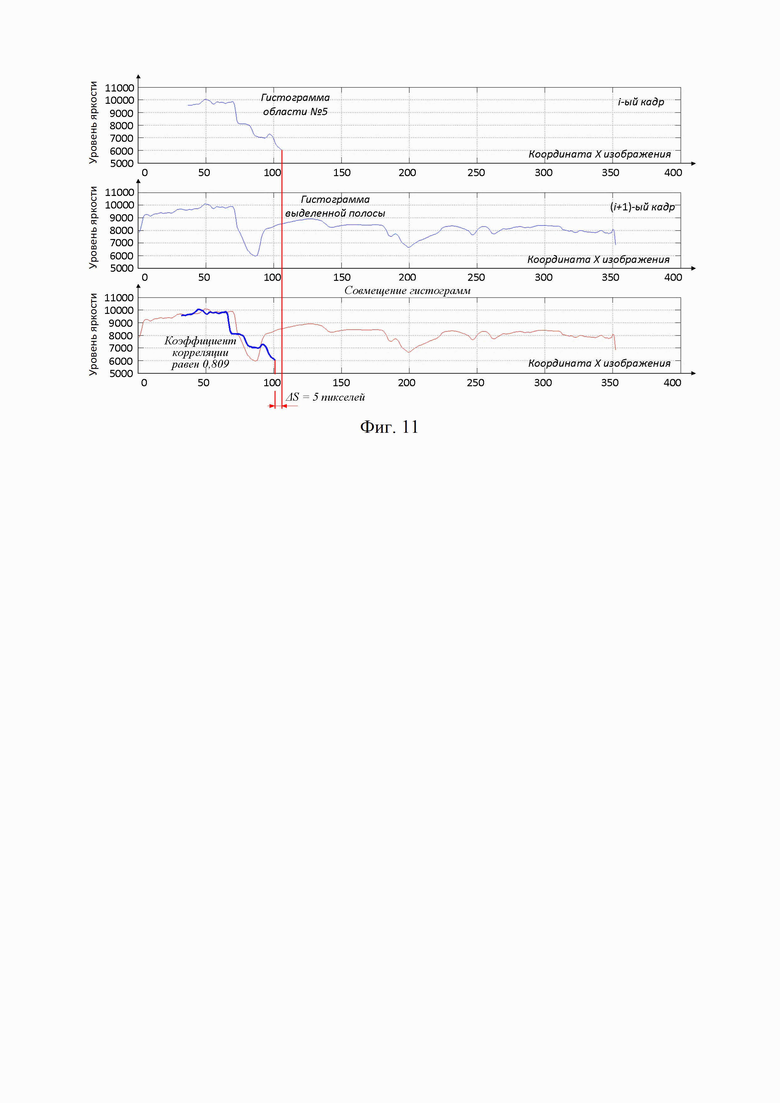
На фиг. 10 в соответствии со способом [7] информативной областью является область №5 (определена по максимуму дисперсии, выделена желтым прямоугольником). Эта область содержит изображение фона, а не протяженного объекта. На фиг. 11 показан процесс оценки смещений по способу [7].
На фиг. 11 показаны:
- гистограмма области №5 для текущего i-ого кадра;
- гистограмма выделенной полосы для следующего (i+1)-ого кадра;
- результат совмещения гистограмм, определяющих смещение Δs.
Смещение протяженного объекта Δs оценивается неверно: реальное смещение равняется 24 пикселям (см. фиг. 15), в то время как оценка смещения по способу [7] равняется 5 пикселям (см. фиг. 11).
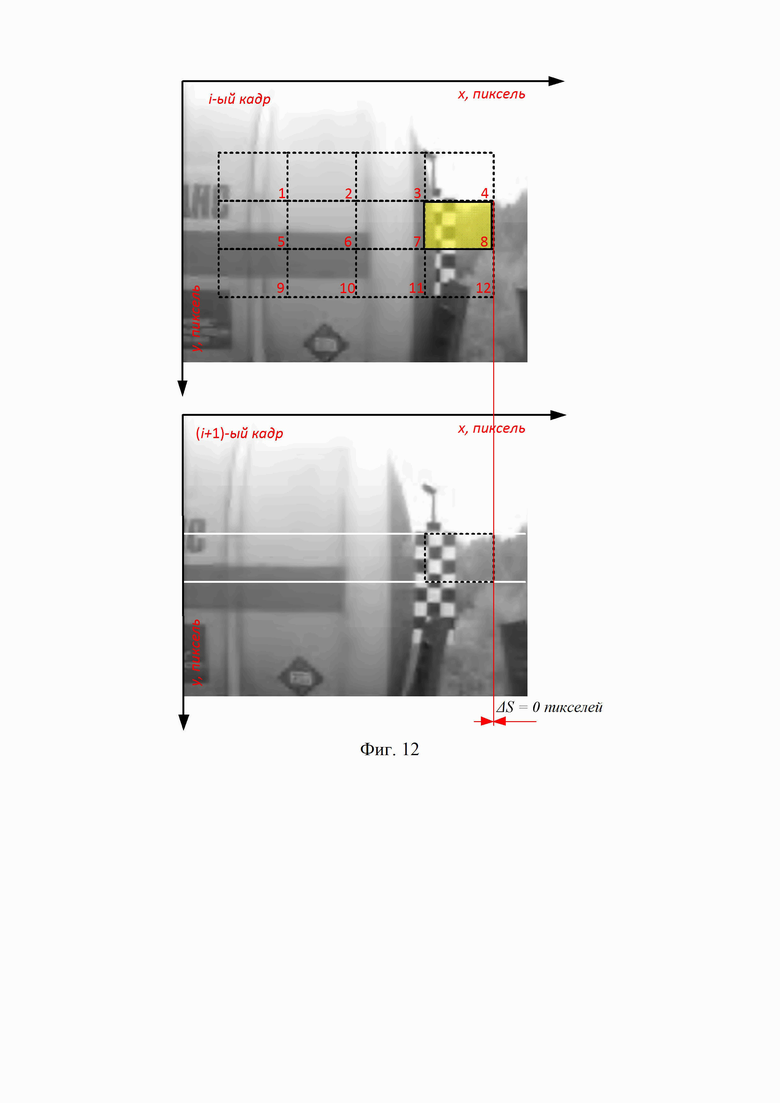
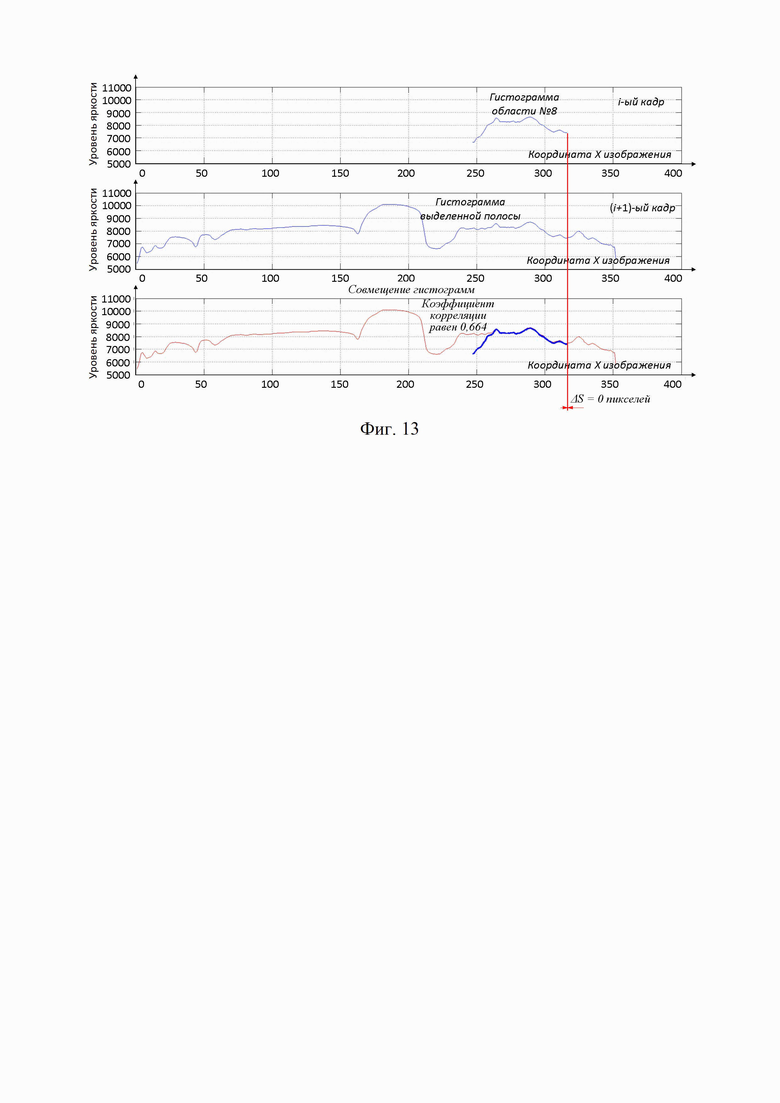
Аналогичный результат показан на фиг. 12. В соответствии со способом [7] информативной областью является область №8 (определена по максимуму дисперсии, выделена желтым прямоугольником). Эта область содержит фрагмент фона, а не протяженного объекта. На фиг. 13 показан процесс оценки смещений по способу [7].
На фиг. 13 показаны:
- гистограмма области №8 для текущего i-ого кадра;
- гистограмма выделенной полосы для следующего (i+1)-ого кадра;
- результат совмещения гистограмм, определяющих смещение Δs.
Смещение протяженного объекта Δs оценивается неверно: реальное смещение равняется 24 пикселям (см. фиг. 17), в то время как оценка смещения по способу [7] равняется 0 пикселей (см. фиг. 13).
Из фиг. 11 и 13 видно, что после совмещения гистограмма выбранной областей не совпадает по форме с гистограммой выделенной полосы. Различие по форме позволяет определить коэффициент корреляции, который много меньше 1,0.
На фиг. 11 коэффициент корреляции равен 0,809.
На фиг. 13 коэффициент корреляции равен 0,664.
Для повышения точности измерения (обеспечения низкой погрешности измерения) скорости протяженного объекта предлагается следующий способ.
Предложенный способ заключается во введении предварительного этапа, на котором выбирается наиболее информативная область кадра с протяженным объектом, а не с фоном.
Предварительный этап включает:
1. Расчет гистограммы для анализируемой прямоугольной области i-ого текущего кадра.
2. Расчет дисперсии гистограммы анализируемой прямоугольной области i-ого текущего кадра.
3. Выделение горизонтальной полосы на (i+1)-ом следующем кадре с координатами, соответствующими координатам прямоугольной области i-ого текущего кадра.
4. Расчет гистограммы для горизонтальной полосы (i+1)-ого следующего кадра.
5. Определение правдоподобной прямоугольной области и смещения Δs по формуле (3).
6. Вычисление коэффициента корреляции между гистограммой анализируемой прямоугольной области i-ого текущего кадра и гистограммой правдоподобной области (i+1)-ого следующего кадра по формуле (4).
Обработка согласно п. 1-6 проводится для каждой прямоугольной области i-ого текущего кадра. А наиболее информативная область с протяженным объектом для оценки скорости движения выбирается по наибольшей дисперсии гистограммы анализируемой прямоугольной области (п. 2) и по коэффициенту корреляции (п. 6), превышающему порог.
Идея использования коэффициента корреляции для выбора наиболее информативной области с протяженным объектом для оценки скорости объекта заключается в следующем.
Если анализируемая область i-ого кадра содержит фрагмент фона, то из-за того, что фон неподвижен, а протяженный объект движется, то правдоподобная область на (i+1)-ом кадре не будет похожа на анализируемую область i-ого кадра, так как часть области с фоном будет соответствовать смещению близкому к нулю (фон неподвижен), а часть области с подвижным объектом будет соответствовать смещению объекта. В результате на (i+1) кадре правдоподобная область не будет похожа по форме на анализируемую область i-ого кадра (см. фиг. 11 и 13).
Таким образом, «сходство» анализируемой области i-ого кадра и правдоподобной области (i+1) кадра означает, что анализируемая область i-ого кадра содержит протяженный объект, а «различие» означает, что анализируемая область i-ого кадра содержит фрагмент фона. А для определения «сходства»/«различия» по форме между гистограммой анализируемой прямоугольной области i-ого кадра и гистограммой правдоподобной области (i+1)-ого кадра используется коэффициент корреляции.
Для принятия решения о «сходстве» или «различии» гистограмм по коэффициенту корреляции используется порог.
Проведенные эксперименты на сортировочной горке станции Кинель Куйбышевской железной дороги показали, что:
- при использовании областей с протяженным объектом коэффициент корреляции не меньше 0,96;
- при использовании областей с фоном коэффициент корреляции не больше 0,88.
По этой причине в качестве значения на порог thrR для коэффициента корреляции было выбрано среднее значение thrR = (0,88+0,96)/2 = 0,92.
Таким образом, если коэффициент корреляции больше, чем порог, то прямоугольная область текущего кадра является информативной, содержит протяженный объект и обеспечивает корректную оценку смещения Δs и скорости движения протяженного объекта, в противном случае прямоугольная область текущего кадра не является информативной, так как содержит изображение фона и не подходит для оценки смещения Δs.
Коэффициент корреляции R между гистограммой анализируемой прямоугольной области текущего кадра и гистограммой правдоподобной области следующего кадра рассчитывается по формуле:
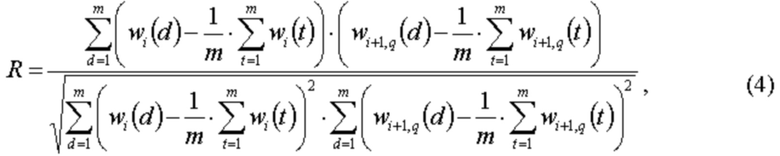
где wi(d) - сумма уровней яркости столбца d прямоугольной области i-ого кадра (значение гистограммы для элемента с номером d);
wi +1, q (d) - сумма уровней яркости столбца d прямоугольной области (i+1)-ого кадра для правдоподобной прямоугольной области, имеющей номер q;
q - номер прямоугольной области, соответствующий правдоподобной прямоугольной области на (i+1)-ом кадре;
d - номер столбца прямоугольной области (номер элемента в гистограмме);
m - количество элементов в гистограмме.
Таким образом, отличием предложенного способа от способа [7] является то, что кроме расчета дисперсии гистограммы анализируемой прямоугольной области текущего кадра дополнительно рассчитывается коэффициент корреляции между гистограммой анализируемой прямоугольной области текущего кадра и гистограммой правдоподобной области следующего кадра для выбора информативной области с протяженным объектом для оценки смещения и скорости движения объекта.
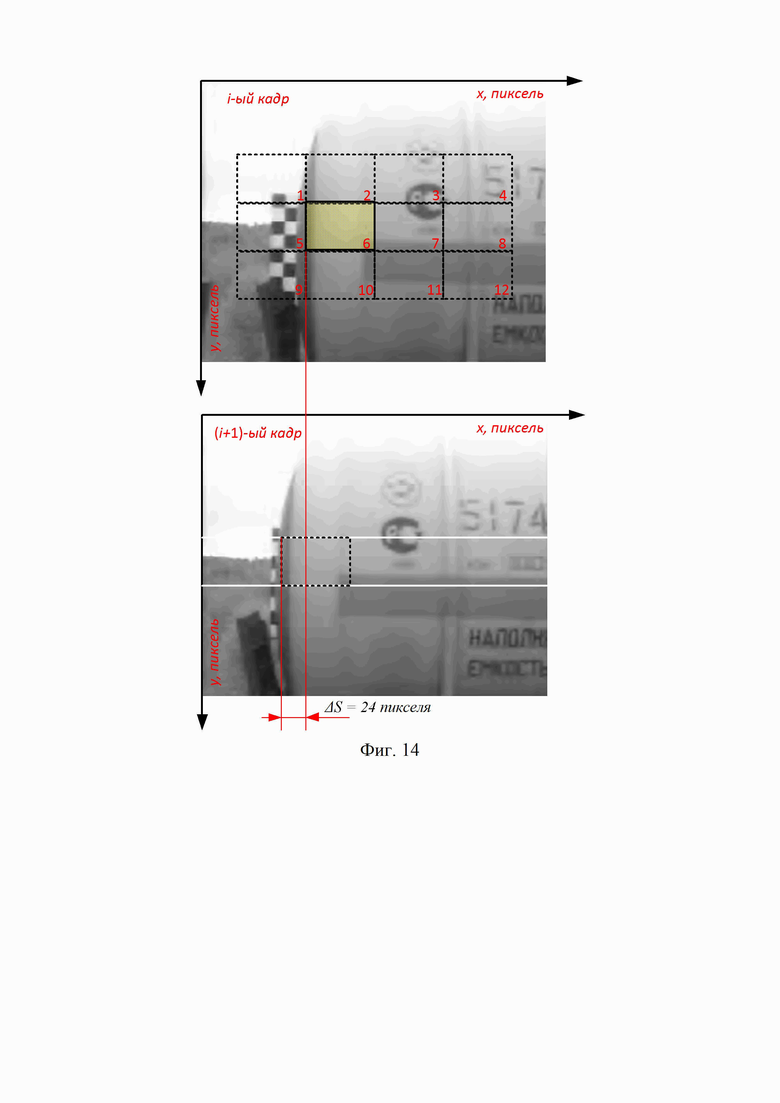
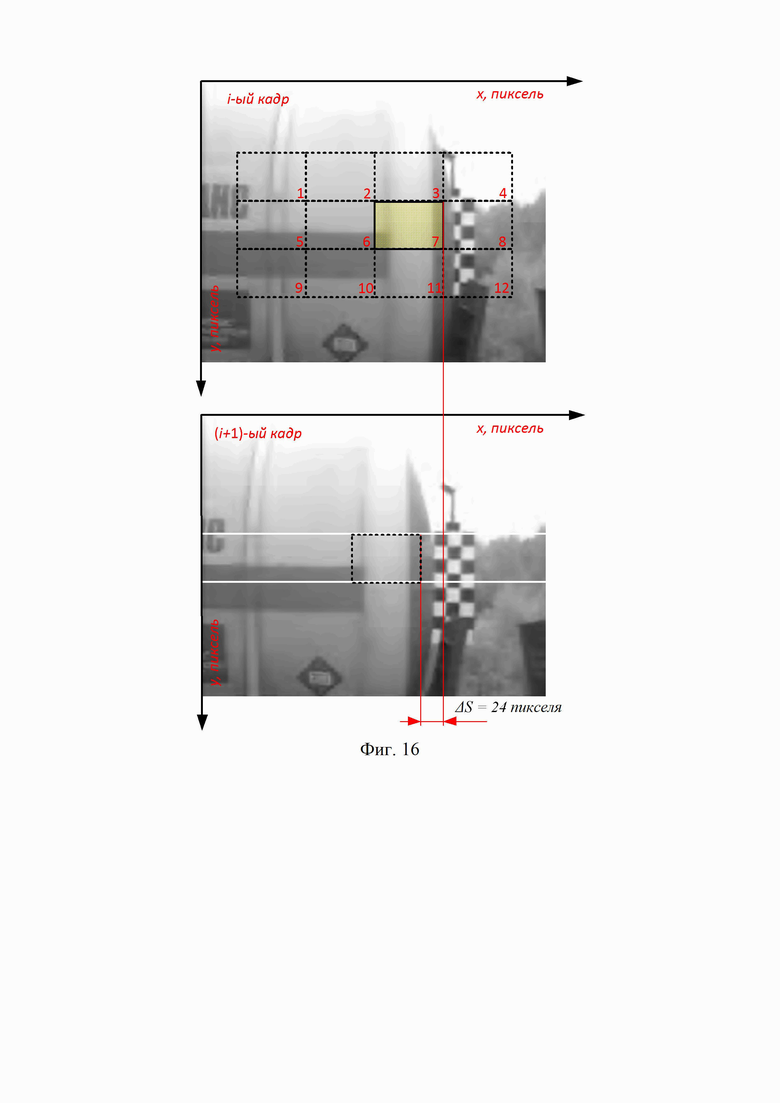
На фиг. 14-17 показаны кадры, аналогичные фиг. 10-13 соответственно, но для выбора области для расчета смещений был использован предложенный выше способ.
Предложенный способ обеспечивает выбор на текущем кадре областей, содержащих изображение движущегося объекта, а не фона, что позволяет корректно оценивать смещение Δs и скорость движения протяженного объекта.
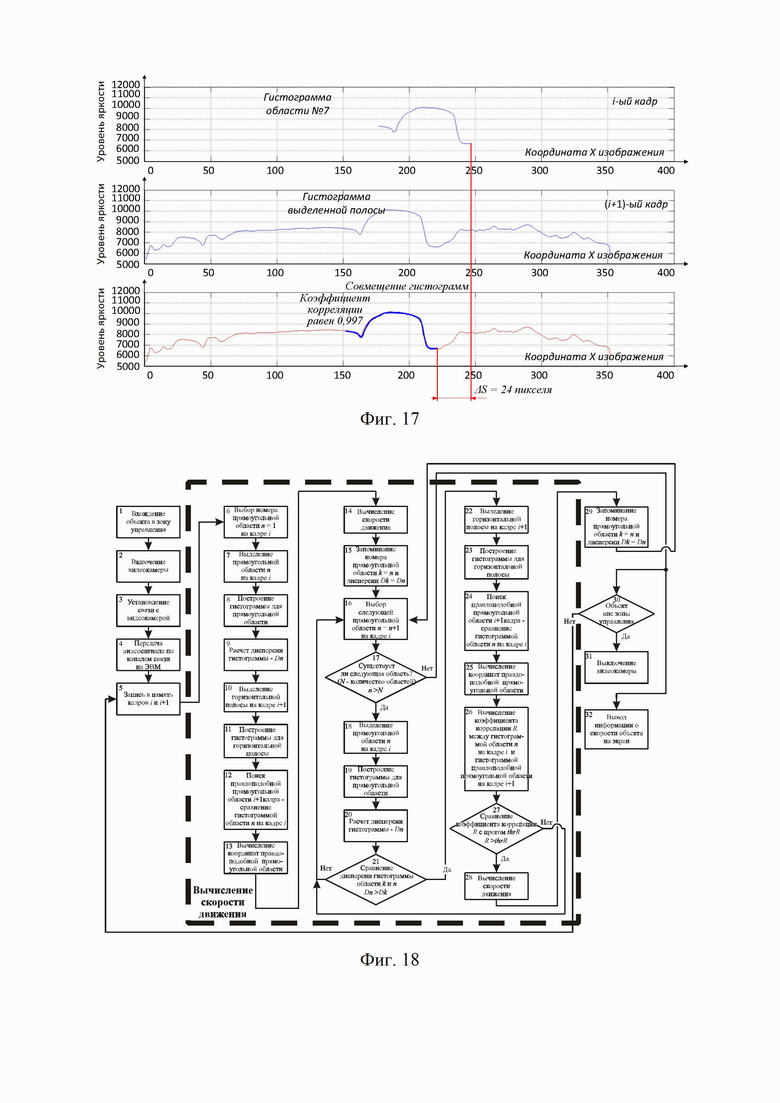
Из фиг. 15 и 17 видно, что после совмещения гистограмма выбранной области совпадает по форме с гистограммой выделенной полосы. Сходство гистограмм по форме позволяет определить коэффициент корреляции, который близок к 1,0.
На фиг. 15 коэффициент корреляции равен 0,998.
На фиг. 17 коэффициент корреляции равен 0,997.
В обоих случаях коэффициент корреляции больше порога thrR = 0,96, что позволяет выбрать информативную область с протяженным объектом для оценки смещения и скорости объекта (в соответствии с вышеописанным способом).
Введение дополнительного этапа выбора области (по сравнению с прототипом [7]) незначительно увеличивает время обработки, и удовлетворяет условиям работы в режиме реального времени.
Дополнительный этап занимает менее 1% процессорного времени от общей процедуры оценки смещения на примере изображений, в которых прототип [7] не обеспечивал корректное измерение смещений и скорости протяженного объекта.
На фиг. 18 представлен алгоритм работы автоматизированной системы измерения параметров движения протяженного объекта на базе предлагаемого способа.
На фиг. 19 представлен возможный интерфейс программного обеспечения для измерения параметров движения протяженного объекта.
Система включается в работу (блок № 2 на фиг. 18) после того, как объект войдет в зону контроля (блок № 1 на фиг. 18) и будет сформирован соответствующий сигнал управления существующей системой (например, АСУ сортировочной станции железнодорожного транспорта).
Далее начинает производиться съемка видеокамерой (устройство регистрации) с последующей передачей данных по каналу связи на ЭВМ (блок № 4 на фиг. 18).
Принимая данные, вычислительная машина фиксирует информацию.
Экспериментальные данные записываются в базу данных для последующего математического анализа с помощью разработанного прикладного программного обеспечения.
Из сформированного массива изображений текущий i-ый кадр и следующий (i+1)-ый кадр записываются в память для последующего анализа (блок № 5 на фиг. 15).
Далее на текущем i-ом кадре выделяются прямоугольные области размером m×n, где n - высота прямоугольной области в пикселях, m - длина в пикселях (фиг. 9). Для каждой области рассчитывается гистограмма по правилу: для каждого из m столбцов шириной в один пиксель производиться суммирование уровня яркости всех n пикселей. На следующем (i+1)-ом кадре выделяется горизонтальная полоса с координатами, соответствующими координатам прямоугольной области текущего i-го кадра, и определяется правдоподобная прямоугольная область. Максимальное значении дисперсии гистограммы прямоугольной области на i-ом кадре и коэффициент корреляции между гистограммой прямоугольной области текущего i-ого кадра и гистограммой правдоподобной области следующего (i+1)-ого кадра, превышающий порог, определяет информативную область, смещение Δs и скорость протяженного объекта (блоки № 6-29 на фиг. 18).
За период следования кадров τ объект перемещается по горизонтали на расстояние S, а соответствующее объекту изображение смещается на Δs пикселей (блок № 28 на фиг. 18). Расчет скорости проводится по формуле:

После того, как объект перемещается за пределы зоны управления (блок № 30 на фиг. 18), происходит выключение видеокамеры (блок № 31, фиг. 18).
На основе предложенного способа была разработана и испытана автоматизированная система измерения скорости движения протяженных объектов. Испытания проводились на сортировочной станции Кинель Куйбышевской железной дороги при плохих погодных условиях - во время метели. Дополнительно введенный этап выбора области обеспечил корректное измерение скорости объекта за счет выбора наиболее информативной области кадра с протяженным объектом, а не с фоном.
Предложенный способ измерения скорости движения протяженных объектов является реализуемым, так как введение дополнительного этапа выбора области (по сравнению с прототипом [7]) незначительно увеличивает время обработки сигналов (менее 1%) и удовлетворяет условиям работы в режиме реального времени.
Интерфейс программы с реализованным способом представлен на фиг. 19.
ЛИТЕРАТУРА
1. Патент №2229404, кл. B61L 17/00, 2004.
2. Патент №2216780, кл. G06T 7/20, 2003.
3. Васин Н.Н., Куринский В.Ю. Метод измерения скорости движения железнодорожных вагонов на сортировочной горке. // Инфокоммуникационные технологии, 2005. - Т3. - №1. - С. 40-44.
4. Васин Н.Н., Куринский В.Ю. Обработка видеосигналов для измерения скорости движения железнодорожных вагонов на сортировочной горке // Компьютерная оптика, 2005. №27. с. 185-188.
5. Патент № 753244, кл. G01C 23/00, 2006.
6. Патент № 2398240, кл. G01P 3/36, 2010.
7. Патент № 2747041, кл. G01P 3/36, 2021.
8. Патент № 2578648, кл. F16F 15/02, F16F 7/00, 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения скорости движения протяженных объектов | 2020 |
|
RU2747041C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2009 |
|
RU2398240C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА ПОВЕРХНОСТИ РЕЛЬСОВ | 2010 |
|
RU2426069C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И АВТОСОПРОВОЖДЕНИЯ ОБЪЕКТОВ ЦЕЛЕУКАЗАНИЯ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2748763C1 |
| АВТОМАТИЧЕСКАЯ СЪЕМКА ДОКУМЕНТА С ЗАДАННЫМИ ПРОПОРЦИЯМИ | 2013 |
|
RU2541353C2 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО ЗОНИРОВАНИЯ ТЕРРИТОРИИ | 1998 |
|
RU2132606C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| Способ детекции протяженных линейных объектов на изображении | 2022 |
|
RU2802991C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |



Изобретение относится к бесконтактным измерителям параметров движения протяженных объектов. Заявленный способ измерения скорости движения протяженного объекта основан на проецировании его изображения на экран приемника излучения - видеокамеры и преобразовании элементов изображения в электрические сигналы. На текущем кадре выделяется прямоугольная область, для которой рассчитывается гистограмма, получаемая путем суммирования уровней яркости пикселей каждого столбца шириной в один пиксель, на следующем кадре выделяется полоса, верхняя и нижняя граница которой соответствуют выделенной прямоугольной области текущего кадра с аналогичными координатами верхней и нижней границы, а для выделенной полосы также рассчитывается гистограмма. Далее внутри выделенной полосы производится поиск правдоподобной прямоугольной области по значению наименьшей суммы квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего кадра и последовательно анализируемых аналогичных областей выделенной полосы следующего кадра, положение прямоугольной области текущего кадра относительного правдоподобной прямоугольной области следующего кадра соответствует значению смещения изображения протяженного объекта за период следования кадров, а найденное значение смещения используется для расчета скорости движения протяженного объекта. При этом проводят предварительную обработку нескольких анализируемых областей изображения, для которых на дополнительно введенном предварительном этапе рассчитываются гистограммы уровней яркости, производится определение дисперсии гистограммы и коэффициента корреляции между гистограммой прямоугольной области текущего кадра и гистограммой правдоподобной области следующего кадра, что определяет наиболее информативную область, содержащую протяженный движущийся объект, выбираемую по наибольшей дисперсии гистограммы уровней яркости и коэффициентом корреляции, превышающем порог, которая используется для измерения величины смещения изображения объекта за период следования кадров и расчета скорости движения протяженного объекта по формуле: V = K⋅Δs/τ, где K - постоянный коэффициент, характеризующий расстояние от видеокамеры до объекта, Δs - смещение видеоизображения объекта, а τ - период следования кадров. Технический результат - повышение точности измерения (обеспечение низкой погрешности измерения) скорости движения протяженного объекта за счет выбора наиболее информативной области с протяженным объектом. 19 ил.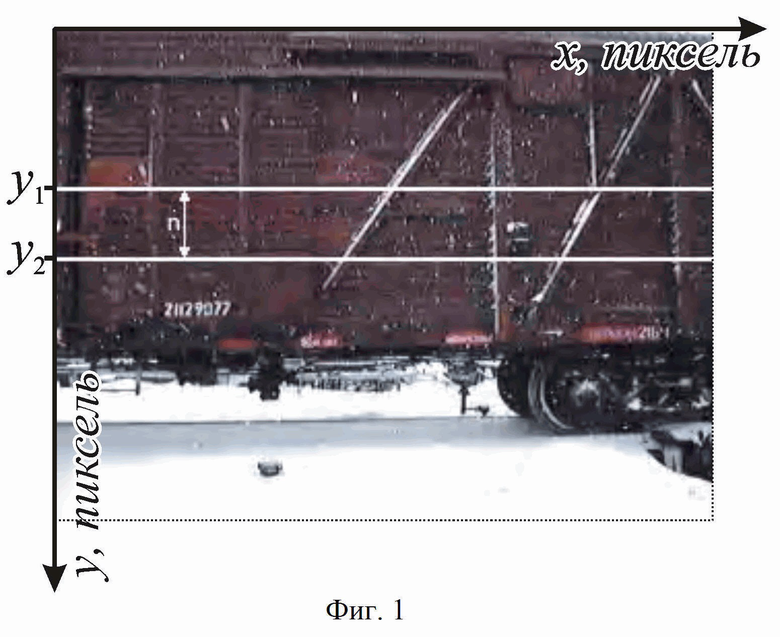
Способ измерения скорости движения протяженного объекта, основанный на проецировании его изображения на экран приемника излучения - видеокамеры и преобразовании элементов изображения в электрические сигналы, когда на текущем кадре выделяется прямоугольная область, для которой рассчитывается гистограмма, получаемая путем суммирования уровней яркости пикселей каждого столбца шириной в один пиксель, на следующем кадре выделяется полоса, верхняя и нижняя граница которой соответствуют выделенной прямоугольной области текущего кадра с аналогичными координатами верхней и нижней границы, для выделенной полосы также рассчитывается гистограмма, далее внутри выделенной полосы производится поиск правдоподобной прямоугольной области по значению наименьшей суммы квадратов разности между соответствующими элементами гистограмм выделенной прямоугольной области текущего кадра и последовательно анализируемых аналогичных областей выделенной полосы следующего кадра, положение прямоугольной области текущего кадра относительного правдоподобной прямоугольной области следующего кадра соответствует значению смещения изображения протяженного объекта за период следования кадров, найденное значение смещения используется для расчета скорости движения протяженного объекта, отличающийся тем, что проводят предварительную обработку нескольких анализируемых областей изображения, для которых на дополнительно введенном предварительном этапе рассчитываются гистограммы уровней яркости, производится определение дисперсии гистограммы и коэффициента корреляции между гистограммой прямоугольной области текущего кадра и гистограммой правдоподобной области следующего кадра, что определяет наиболее информативную область, содержащую протяженный движущийся объект, выбираемую по наибольшей дисперсии гистограммы уровней яркости и коэффициентом корреляции, превышающим порог, которая используется для измерения величины смещения изображения объекта за период следования кадров и расчета скорости движения протяженного объекта по формуле: V = K⋅Δs/τ, где K - постоянный коэффициент, характеризующий расстояние от видеокамеры до объекта, Δs - смещение видеоизображения объекта, а τ - период следования кадров.
| Способ измерения скорости движения протяженных объектов | 2020 |
|
RU2747041C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2009 |
|
RU2398240C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| US 5771485 A, 23.06.1998 | |||
| US 10397491 B2, 27.08.2019 | |||
| Способ измерения параметров движения протяженного объекта со случайным распределением яркости | 1979 |
|
SU753244A1 |
