Изобретение относится к медицине, а именно к эндоскопическим хирургическим аппаратам, и, в частности, к механизированным эндоскопическим хирургическим аппаратам.
Эндоскопическим хирургическим аппаратам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических аппаратов, которые пригодны для точного размещения дистального концевого эффектора в искомом операционном поле через канюлю или троакар.
Концевой эффектор является участком аппарата (например, эндоскопического режущего инструмента (типа endocutter), захвата, режущего приспособления, сшивающих скобками аппаратов, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства генной терапии к месту действия и энергетического устройства, использующего ультразвук, высокую частоту (RF), лазер и т.д.), выполненным с возможностью взаимодействия с тканью множеством способов для получения искомого диагностического или терапевтического результата.
Концевой эффектор выполняется с размером для введения через троакар в пациента.
Концевой эффектор эндоскопического хирургического аппарата-манипулятора является участком аппарата-манипулятора (в конкретном случае захвата-зажима).
Ходовой механизм концевого эффектора эндоскопического хирургического аппарата служит для регулирования положения инструмента (в конкретном случае захвата-зажима), а именно положения раскрытия и закрытия инструмента.
В зависимости от характера операции может потребоваться дополнительная регулировка положения концевого эффектора эндоскопического хирургического аппарата.
Известен концевой эффектор, описанный в патенте WO 2013119545 (PCT/US 2013/024736) от 10 февраля 2012 г., опубл. 15 августа 2013 г.
В одном из вариантов осуществления изобретения инструмент, а именно установочная часть хирургического инструмента, содержит зажим-челюсти, механизм открытия/закрытия и механизм приведения в действие ножа.
Хирургический инструмент содержит реечный передаточный механизм - механизм для обеспечения зажима челюсти и выполнения функции открытия/закрытия и нож срабатывания.
Работа механизма осуществляется первой шестерней, соединенной с возможностью вращения тела таким образом, что вращение соответствующего ведомого элемента вызывает вращение первой шестерни в первом направлении. Первая шестерня находится в зацеплении со второй шестерней, так что вторая шестерня вращается в направлении, противоположном первой шестерне.
Зубчатый механизм, включающий первую и вторую шестерни, сконфигурирован для управления открытием и закрытием верхней зажимной челюсти и движением с режущего элемента в форме двутавровой балки через щель, образованную в зажиме челюсти.
В другом варианте осуществления изобретения вторая шестерня представляет собой шестерню в зацеплении с шестерней рейки, которая движется в направлении гильзы.
Реечная передача соединена с блоком закрытия/открытия, который соединен с дистальным участком вала в сборе.
Недостатками описанных механизмов является их сложность и содержание многих конструктивных деталей.
Известен патент США 2012/0150154 от 15 ноября 2010г., опубл. 14 июня 2012 г. (выбран в качестве ближайшего аналога).
Работа устройства по ближайшему аналогу США 2012/0150154:
Концевой эффектор конструктивно включает в себя челюсти (зажим), которые могут открываться-закрываться при помощи ходового механизма, включающего в себя ходовой винт, гайку разведения, которая имеет выступы, взаимодействующие с прорезью, тем самым вызывая сочленение челюстей вокруг штифта.
Конструкция включает штифт для монтажа с возможностью поворота верхней и нижней челюстей к раме. Ходовой механизм, ходовой винт, гайка разведения, которая продвигается в переднем направлении и отводится назад вдоль щели посредством вращения винта. Гайка включает выступы и взаимодействует с прорезью, тем самым вызывая сочленение челюстей вокруг штифта.
Вращательное движение приводного вала преобразует в поступательное движение челюсти эффектора.
Недостатками известного технического решения по ближайшему аналогу является сложность изготовления деталей механизма, приводящего в движение челюсти (зажим).
Задачей заявляемого технического решения является создание упрощенного механизма приведения в действие хирургического инструмента (зажимы, иглодержатели, ножницы и т.п.).
Поставленная задача достигается тем, что концевой эффектор эндоскопического хирургического аппарата содержит хирургический инструмент, приводимый в движение механизмом управления приводом через ходовой механизм, содержащим передачу типа винт-гайка, рычаги сведения/разведения, при этом ходовой механизм дополнительно содержит рычаги, соединенные с ответными рычагами сведения/разведения посредством осей, а функцию гайки выполняет коническая шестерня с резьбовой втулкой.
Концевой эффектор эндоскопического хирургического аппарата, содержащий хирургический инструмент, приводится в движение механизмом, получившим название в нашем случае - ходовой механизм, содержащим передачу типа винт-гайка. Функцию винта выполняет ходовой винт с элементами крепления рычагов ходового механизма, функцию гайки - коническая шестерня с резьбовой втулкой. Рычаги ходового механизма соединены с ответными рычагами сведения-разведения концевого эффектора посредством осей.
Механическая часть, регулирующая положение инструмента (сведение или разведение), работает по принципу преобразования вращательного движения передачи
винт-гайка в возвратно-поступательное движение, передающее это движение на рычаги сведения-разведения рабочей части концевого эффектора.
Механизм управления рабочей частью концевого эффектора хирургического манипулятора представлен на чертежах:
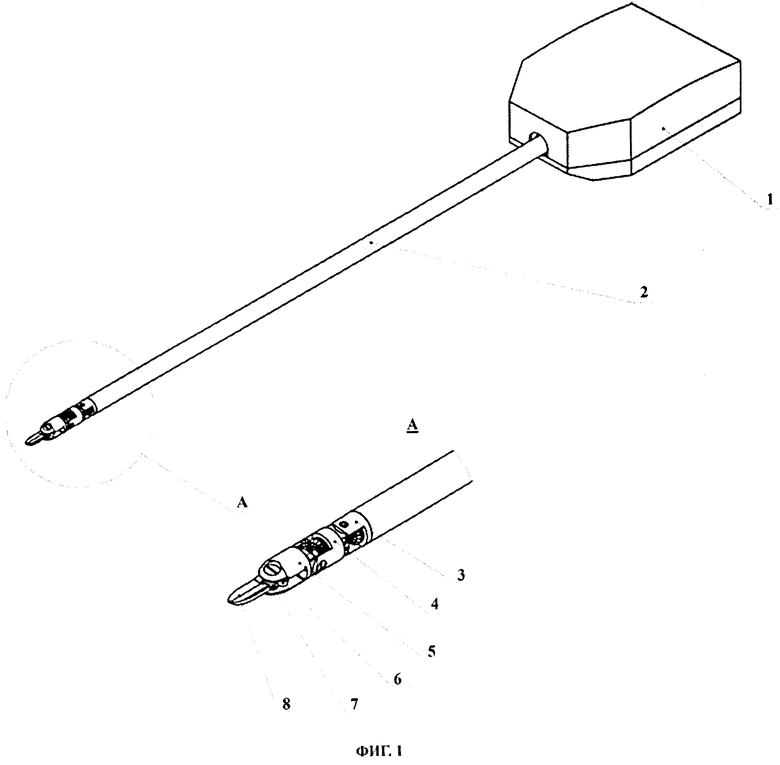
Фигура 1 - внешний вид механизма управления рабочей частью концевого эффектора хирургического манипулятора.
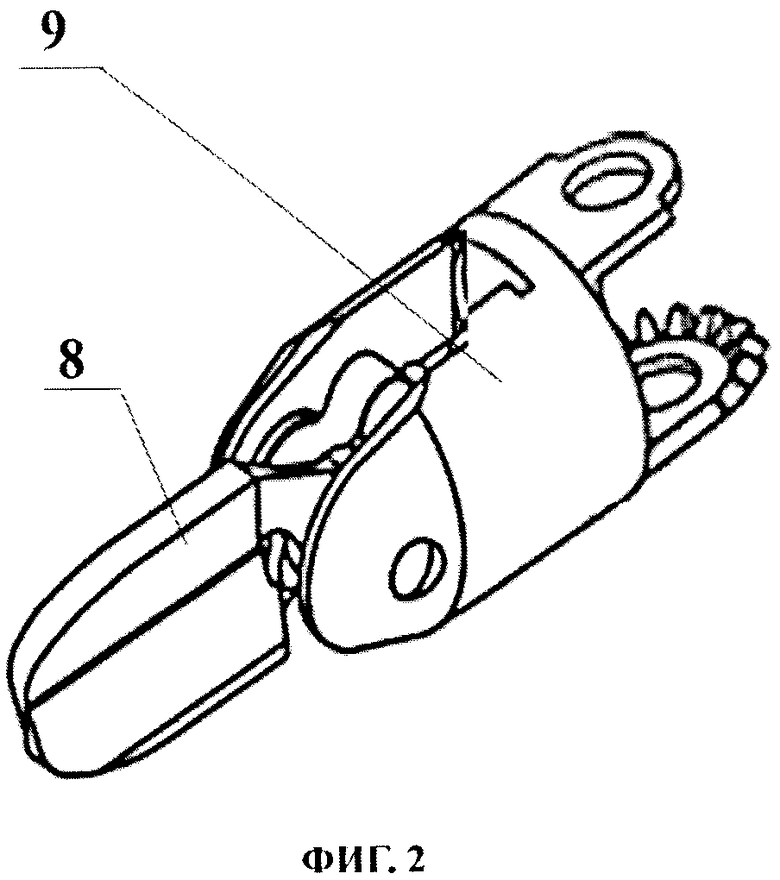
Фигура 2 - внешний вид концевого эффектора.
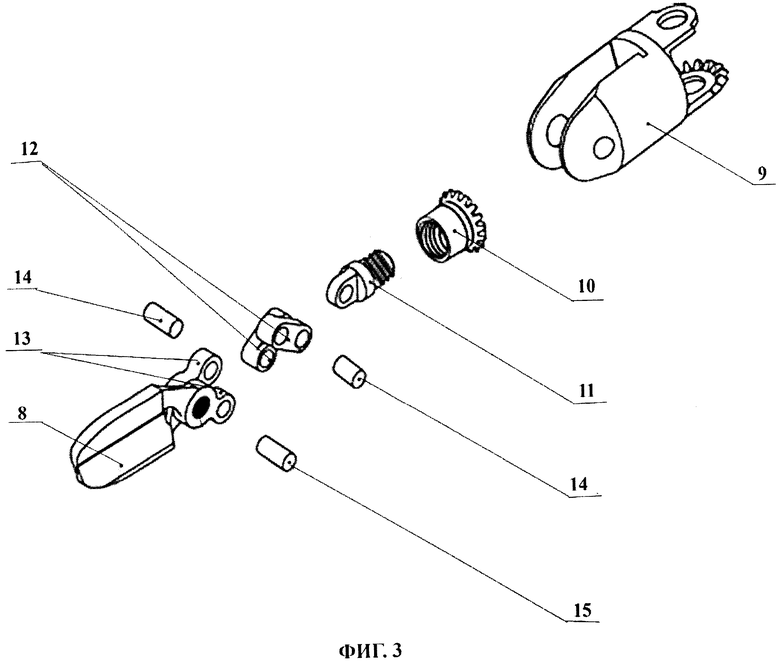
Фигура 3 - детальный вид конструктивных узлов ходового механизма рабочей части концевого эффектора.
Механизм управления привода для хирургического манипулятора включает следующие узлы (фиг. 1):
1 - механизм управления приводом;
2 - приводной вал;
3 - шарнирный узел с тремя коническими дифференциальными передачами;
4 - шарнирный узел с двумя коническими дифференциальными передачами;
5 - шарнирный узел с ходовым механизмом;
6 - ходовой механизм;
7 - концевой эффектор.
Узел 6 - ходовой механизм, приводящий в действие (сведение-/разведение) хирургический инструмент 8.
Ходовой механизм (фиг. 3, фиг. 2), приводящий в движение инструмент, состоит из корпуса 9, винтовой передачи, включающей ходовой винт 11, коническую шестерню ходового механизма с резьбовой втулкой 10, рычагов 12 и рычагов 13, которые соединяются с помощью осей 14, 15, и рабочей части 8 (хирургический инструмент) концевого эффектора 7.
Движение механизма сведения/разведения рабочей части осуществляется путем преобразования вращательного движения передачи винт-гайка в возвратно-поступательное
движение, передающее это движение на рычаги сведения/разведения рабочей части концевого эффектора.
Осуществление изобретения:
Перемещение ведущего элемента ходового винта 11, приводимого в движение ходовым механизмом 5 (фиг. 1), приводит к перемещению рычагов 12, закрепленных в корпусе 9 на осях 14, которое в свою очередь сопровождается перемещением рабочей части 8 концевого эффектора 7 (фиг. 1).
Рабочая часть выдвигается в дистальном направлении после передачи ей вращательного движения от механизма управления приводом 1 (фиг. 1) через приводной вал 2 и передачу типа винт-гайка, включающую ходовой механизм 10 и ходовой винт 11 (фиг. 3), и задвигается обратно в проксимальном направлении после передачи ей вращательного обратного движения.
В качестве хирургического инструмента в конкретном случае концевой эффектор содержит захват-челюсти.
В качестве хирургического инструмента могут быть применены режущие приспособления, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства, энергетические устройства, использующие ультразвук, высокую частоту (RF), лазер и т.д., выполненные с возможностью взаимодействия с тканью множеством способов для получения искомого диагностического или терапевтического результата. (патент РФ №2499567 от 13.02.2009).
Заявляемое изобретение соответствует критерию «новизна», т.к. из доступных источников информации не выявлены технические решения с такими же существенными признаками.
Заявляемое изобретение соответствует критерию «изобретательский уровень», так как является неочевидным для специалиста.
Заявляемое изобретение соответствует критерию «промышленная применимость», так как может быть получено из известных средств и известными методами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2541829C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И МЕХАНИЧЕСКОЙ СМЫКАЮЩЕЙ СИСТЕМОЙ | 2007 |
|
RU2449750C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И МЕХАНИЧЕСКОЙ СМЫКАЮЩЕЙ СИСТЕМОЙ | 2007 |
|
RU2449747C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ПОЛОЖЕНИЮ | 2007 |
|
RU2461362C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И АДАПТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ С ПОЛЬЗОВАТЕЛЕМ | 2007 |
|
RU2449748C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ С ПОЛЬЗОВАТЕЛЕМ | 2007 |
|
RU2449746C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И ОБРАТНОЙ СВЯЗЬЮ ПО УСИЛИЮ НАГРУЗКИ | 2007 |
|
RU2450793C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ФИКСАЦИИ ЗАМЫКАЮЩЕГО РЫЧАГА | 2007 |
|
RU2449751C2 |
Изобретение относится к медицине, а именно к эндоскопическим хирургическим аппаратам, и, в частности, к механизированным эндоскопическим хирургическим аппаратам. Задачей изобретения является создание упрощенного механизма приведения в действие хирургического инструмента (зажимы, иглодержатели, ножницы и т.п.). Поставленная задача достигается тем, что концевой эффектор эндоскопического хирургического аппарата содержит хирургический инструмент, приводимый в движение механизмом, содержащим передачу типа винт-гайка, при этом функцию гайки выполняет коническая шестерня с резьбовой втулкой, а рычаги ходового механизма соединены с ответными рычагами сведения/разведения концевого эффектора посредством осей. 4 з.п. ф-лы, 3 ил.
1. Концевой эффектор эндоскопического хирургического аппарата, содержащий хирургический инструмент, приводимый в движение механизмом управления приводом через ходовой механизм, содержащий передачу типа винт-гайка, рычаги сведения/разведения, отличающийся тем, что ходовой механизм дополнительно содержит рычаги, соединенные с ответными рычагами сведения/разведения посредством осей, а функцию гайки выполняет коническая шестерня с резьбовой втулкой.
2. Концевой эффектор по п. 1, отличающийся тем, что в качестве хирургического инструмента содержит захват-челюсти.
3. Концевой эффектор по п. 1, отличающийся тем, что в качестве хирургического инструмента содержит режущие приспособления.
4. Концевой эффектор по п. 1, отличающийся тем, что в качестве хирургического инструмента содержит приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| US 4641657 А, 10.02.1987 | |||

