Изобретение относится к медицине, а именно к эндоскопическим хирургическим аппаратам, в частности к механизированным эндоскопическим хирургическим аппаратами, предназначено для применения во время проведения эндохирургических вмешательств.
Эндоскопическим хирургическим аппаратам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений.
В области эндоскопических хирургических аппаратов выполняются разработки, которые пригодны для точного размещения дистального концевого эффектора, являющегося инструментом для проведения операции, в искомом операционном поле через канюлю или троакар.
Робот-манипулятор содержит основание, руку манипулятора, имеющую по существу вертикальную и горизонтальную части, запястный шарнир манипулятора и исполнительный блок для медицинского инструмента.
Концевой эффектор является участком аппарата (например, эндоскопического режущего инструмента (типа endocutter), захвата, режущего приспособления, сшивающих скобками аппаратов, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства генной терапии к месту действия и энергетического устройства, использующего ультразвук, высокую частоту (RF), лазер и т.д.), выполненным с возможностью взаимодействия с тканью множеством способов для получения искомого диагностического или терапевтического результата.
Концевой эффектор выполняется с размером для введения через троакар в пациента.
Механизм концевого эффектора эндоскопического хирургического аппарата служит для регулирования положения инструмента, а именно положения раскрытия и закрытия инструмента.
Механизм управления привода инструмента для хирургического манипулятора - главный приводной узел, функционально связанный с концевым эффектором через ряд механизмов, для приведения подвижного инструмента в движение.
На сегодняшний день в мире известны такие роботизированные хирургические системы как «DaVinci», «Zeus», «ΑΕΖΟΡ».
Вначале девяностых годов роботизированная лапароскопия получила значительное развитие. Две типичные, серийно выпускаемые роботизированные хирургические системы - это хирургическая система, известная под торговой маркой ″DA VINCI″, разработанная компанией Intuitive Surgical Inc., Саннивейл, Калифорния, и хирургическая система, известная под торговой маркой ″ZEUS″, первоначально разработанная компанией Computer Motion Inc., Голета, Калифорния.
Хирургическая система, известная под именем ″DA VINCI″, описана помимо других Молом и др. (Molletal.) в патентах US 6,659,939; US 6,837,883 и других патентных документах того же самого патентообладателя.
Хирургическая система, известная под именем ″ZEUS″, описана помимо других Вонг и др. (Wangetal.) в патентах US 6,102,850; US 5,855,583; US 5,762,458; US 5,515,478 и другой патентной литературе, переуступленной компании Computer Motion Inc., Голета, Калифорния.
Данные телеуправляемые роботизированные установки позволяют управлять хирургическим вмешательством либо напрямую из операционного зала, либо из удаленного местоположения, используя обратный визуальный контроль на панели управления. В любом случае, утомительная поза хирурга исключается.
Кроме высоких затрат на приобретение и эксплуатационные расходы данных роботизированных систем, их распространение и признание в медицинском сообществе ограничивается, среди прочего, ввиду дефицита разнообразия. Обе системы были разработаны специально для кардиологической хирургии, в которой топологическая анатомия постоянна, рабочее место мало и поэтому точность движения инструмента и манипуляционные возможности требуются только в ограниченном пространстве. Следовательно, механическая конструкция данных систем не совсем удобна для использования в других видах хирургии (включая гинекологию, урологию и общую хирургию), в которых рабочее пространство больше, чем в кардиологии, анатомическая топология варьируется (даже иногда непредсказуемо), а механические свойства ткани и органов различны.
Вне зависимости от этих двух конкретных систем, механическая разработка манипуляторов в роботизированных хирургических системах в настоящий момент допускает значительную возможность улучшения в различных аспектах, среди которых универсальность системы является одним из многих.
Известен приводной узел, описанный в патенте WO 2012068156 (PCT/US 2011/060849), опубл. 24 мая 2012 г., представляющий собой тросовую систему передач и используемый для разделения вращения вала инструмента и приведения в действие концевого эффектора хирургического инструмента.
Передача включает блок барабана, который вращательно соединен с вращением вала инструмента относительно проксимального корпуса, блок приведения в действие концевого эффектора, который вращательно соединен с источником приведения в действие, и шарико-винтовую паредачу (барабан), которая вращательно соединяется с механизмом приведения в движение челюстей концевого эффектора. Первый трос включает как блок барабана, так и шарико-винтовую передачу, вращение которой вызывает вращательное движение блок барабана. Второй трос включает блок приведения в действие концевого эффектора, прикрепленного к первому блоку и второму блоку. Первый многороликовый блок включает первый движущийся барабан. Второй многороликовый блок включает второй движущийся барабан. Первый и второй движущиеся барабаны затягивают первый трос.
Между блоком барабана и шарико-винтовой паредачей первый трос захватывает 4 зафиксированных ведущих ролика. Эти фиксированные ведущие ролики (барабаны) включают первый ведущий ролик и второй ведущий ролик, третий ролик, четвертый ведущий ролик.
Согласно изобретению может быть использована любая тросовая система передач. Например, в тросовой системе первый трос может приводиться в движение с помощью ролика (барабана), который приводит в движение концевой эффектор, второй трос приводится в движение цилиндром барабана.
Недостатком привода с тросовой системой передач является ненадежность и недолговечность конструкции.
Известен приводной узел, описанный в патенте WO 2013119545 (PCT/US 2013/024736) от 10 фев. 2012, опубл. 15 авг. 2013 г., выбранный в качестве ближайшего аналога.
В одном варианте ближайшего аналога хирургический инструмент содержит реечный передаточный механизм для обеспечения функциональных возможностей шарнирного вала.
Реечное зацепление механизма содержит первую шестерню, соединенную с вращающимся телом так, что вращение соответствующего ведомого элемента вызывает поворот первой шестерни. Подшипник соединен с вращающимся телом и расположен между ведомым элементом и второй шестерней.
Первая шестерня прикреплена к первой реечной передаче таким образом, что преобразование вращательного движения первой шестерни в линейное перемещение первой реечной передачи контролируется соединением сочленения узла валов в левом направлении.
Подшипник соединен с возможностью вращения тела и расположен между ведомым элементом и второй шестерней.
Вторая шестерня находится в зацеплении со второй реечной передачей таким образом, что преобразование вращательного движения второй шестерни в линейное перемещение второй реечной передачи контролируется соединением сочленения узла валов в правом направлении.
Вторая реечная передача прикреплена ко второй шарнирной зоне (фиг. 10, 14, 21, 22, 106, 107) так, что линейное перемещение второй шестерни в дистальном направлении происходит вследствие сцепления сочленения узла валов в правом направлении.
Дополнительные подшипники могут быть предусмотрены между вращающимися телами и соответствующими зубчатыми колесами.
Любые подходящие подшипники могут быть предусмотрены для поддержки и стабилизации монтажа и уменьшения трения поворотного вала и шестерен.
В другом варианте осуществления изобретения установочная часть хирургического инструмента включает в себя узел вала механизма вращения.
В этом варианте хирургический инструмент содержит первое спиральное червячное колесо, соединенное с возможностью вращения тела, и второе спиральное червячное колесо, соединенное с валом вращения. Подшипник соединен с вращающимся телом и расположен между ведомым элементом и первым спиральным червячным колесом. Первое спиральное червячное колесо входит в зацепление со вторым спиральным червячным колесом, которое соединено с валом сборки, чтобы контролировать вращение вала в сборе в направлении по часовой стрелке (CW) или против часовой стрелки (CCW) в соответствии с направлением вращения первой и второй червячных передач. Соответственно, вращение первого спирального червячного колеса относительно первой оси преобразуется во вращение второго спирального червячного колеса относительно второй оси, которая перпендикулярна первой оси.
Недостатком ближайшего аналога является конструктивная сложность механизма привода.
Задачей заявляемого технического решения является создание упрощенного, по сравнению с аналогом, механизма управления приводом инструментов, сопрягаемого с управляющей частью ассистирующего мехатронного хирургического комплекса.
Поставленная задача решается тем, что привод для инструмента эндоскопического хирургического аппарата содержит корпус и систему приводных валов, связанных с шарнирными узлами, при этом содержит управляющие механизмы концевого эффектора, выполненные в виде четырех независимых червячных редукторов, каждый из которых соединен с приводным валом, причем приводные валы расположены коаксиально, имеют разный диаметр и длину и передают крутящий момент к соответствующим шарнирным узлам.
В заявляемом техническом решении в приводе для инструмента эндоскопического хирургического аппарата в качестве управляющих механизмов применены четыре независимых червячных редуктора (червячные пары), которые позволяют получить большие передаточные числа, высокую плавность и бесшумность зацепления, повышенную кинематическую точность с возможностью точных делительных перемещений. Предложенная конструкция обладает таким важным свойством, как самоторможение, что обеспечивает фиксацию положения инструмента в заданной точке операционного поля.
ЧЕРТЕЖИ
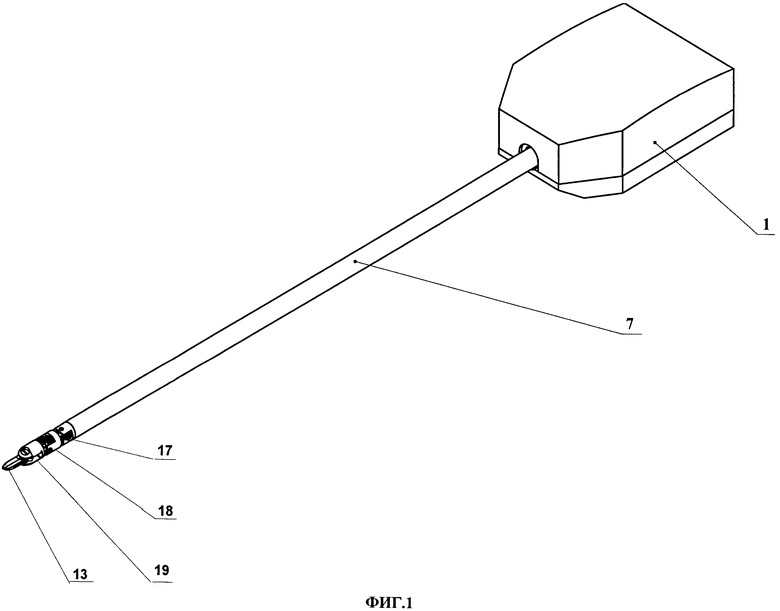
Фигура 1 - внешний вид хирургического манипулятора, включающий все рабочие узлы;
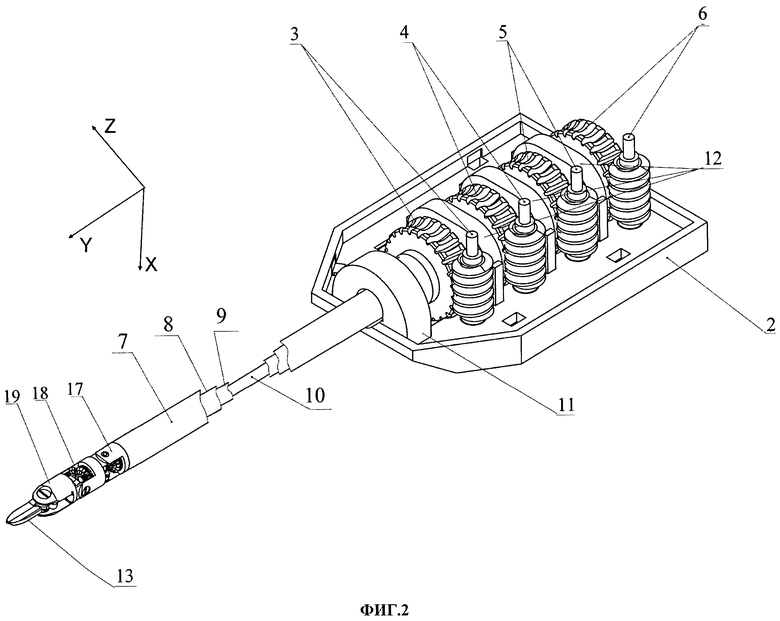
Фигура 2 - общий вид хирургического манипулятора;
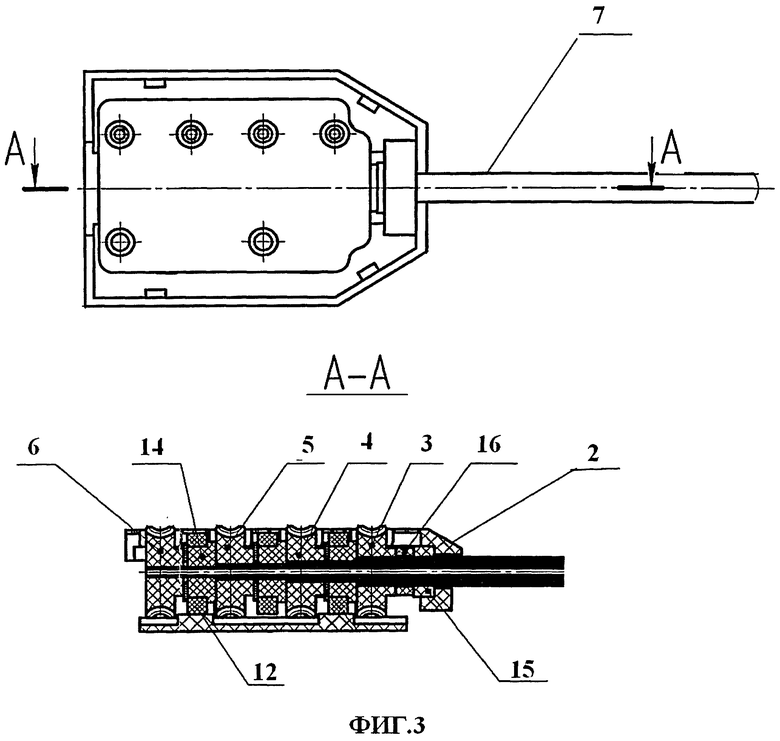
Фигура 3 - вид хирургического манипулятора в разрезе.
Описание
На фиг. 2 и фиг. 3 изображена конструкция механизма управления привода для хирургического манипулятора.
Привод для инструмента эндоскопического хирургического аппарата в качестве управляющих механизмов содержит четыре независимых червячных редуктора, состоящих из червячных пар 3, 4, 5, 6 (фиг 2, фиг 3), расположенных на основании 2 (на фиг. 2) пластмассового корпуса 1 на подшипниковых опорах 12. Червячные редукторы закреплены на трубчатых телескопических приводных валах 7, 8, 9, 10.
Каждое червячное колесо жестко закреплено с помощью клея с собственным трубчатым приводным валом.
Первая червячная пара 3 передает крутящий момент приводному валу 7, связанному с шарнирными узлами 17, 18 и ходовым механизмом 19 концевого эффектора 13.
Вторая червячная пара 4 передает крутящий момент приводному валу 8, связанному с шарнирным узлом 17.
Третья червячная пара 5 передает крутящий момент приводному валу 9, связанному с шарнирным узлом 18.
Четвертая червячная пара 6 передает крутящий момент приводному валу 10, связанному с ходовым механизмом 19 концевого эффектора 13.
На фиг. 1 приводные валы (поз. 8, 9, 10) расположены коаксиально, имеют разный диаметр и длину, и передают крутящий момент к соответствующим зубчатым шестерням шарнирных узлов 17, 18.
Коаксиальный приводной вал закреплен в отверстии элемента основания корпуса 11 втулками 15, 16.
Червячные пары разделены между собой шайбами 12, внутри которых расположены фторопластовые подшипники скольжения 14 (фиг. 3).
Осуществление изобретения
Каждая независимая червячная пара приводится в движение своим шаговым реверсивным электродвигателем.
Каждая независимая червячная пара с закрепленным за ней приводным валом обеспечивает одну степень свободы хирургического инструмента.
Первая червячная пара 3 (фиг. 1, 2, 3) передает крутящий момент на приводной вал 7 (фиг. 2), связанный с шарнирными узлами 17, 18 и ходовым механизмом 19 концевого эффектора 13, обеспечивая его вращение на угол φ=0°±360°.
Вторая червячная пара 4 (фиг. 1, 2, 3) передает крутящий момент на приводной вал 8 (фиг. 2), который приводит в движение шестерни шарнирного узла 17, обеспечивая поворот корпуса шарнирного узла 17 относительно оси приводных валов в плоскости ″ΥΖ″ на угол α≤0°±90°.
Третья червячная пара 5 (фиг. 1, 2, 3) передает крутящий момент на приводной вал 9 (фиг. 2), который приводит в движение через шестерни шарнирного узла 17 шестерни шарнирного узла 18, обеспечивая поворот корпуса шарнирного узла 18 относительно оси приводных валов в плоскости ″ΧΥ″ на угол β≤0°±90°.
Четвертая червячная пара 6 (фиг. 1, 2, 3) передает крутящий момент на приводной вал 10 (фиг. 2), который приводит в движение через шестерни шарнирного узла 17 и 18 шестерню ходового механизма 19 обеспечивая, за счет преобразования вращательного движения в возвратно-поступательное движение ходового винта, сведение/разведение рабочей части концевого эффектора на угол φ≤±38°.
Преимущества заявляемого привода для инструмента эндоскопического хирургического аппарата, основанного на работе четырех независимых червячных редукторов в сравнении с аналогами, основанными на тросовом приводе и червячном редукторе, содержащем реечную передачу:
- наиболее полно отвечает требованиям компоновки;
- обеспечивает высокую плавность и бесшумность зацепления;
- повышенная кинематическая точность с возможностью точных делительных перемещений;
- самоторможение червячной пары обеспечивает фиксацию положения рабочей части инструмента в заданной точке операционного поля за счет возможности самоторможения червячной пары.
Заявляемое изобретение соответствует критерию «новизна», т.к. из доступных источников информации не выявлены технические решения с такими же существенными признаками.
Заявляемое изобретение соответствует критерию «изобретательский уровень» так как является неочевидным для специалиста.
Заявляемое изобретение соответствует критерию «промышленная применимость», так как может быть получено из известных средств и известными методами.
Позиции на чертежах
1 - корпус привода;
2 - основание корпуса привода;
3-1-я червячная пара, закрепленная на приводном валу 7;
4-2-я червячная пара, закрепленная на приводном валу 8;
5-3-я червячная пара, закрепленная на приводном валу 9;
6-4-я червячная пара, закрепленная на приводном валу 10;
11 - элемент основания корпуса с отверстием для закрепления в нем приводных валов;
12 - элемент крепления - шайба;
13 - хирургический инструмент;
14 - подшипник;
15 - втулка;
16 - втулка;
17 - коническая дифференциальная передача;
18 - коническая дифференциальная передача;
19 - шарнирный узел.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| КОНЦЕВОЙ ЭФФЕКТОР ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2546957C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧИ ДЛЯ ХИРУРГИЧЕСКОГО ОТРЕЗНОГО И ФИКСИРУЮЩЕГО АППАРАТА С ПРИВОДОМ ОТ ДВИГАТЕЛЯ | 2007 |
|
RU2464945C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С РОБОТИЗИРОВАННЫМ ПРИВОДОМ И АКТИВИРУЕМОЙ ВРУЧНУЮ РЕВЕРСИРУЮЩЕЙ СИСТЕМОЙ | 2013 |
|
RU2641977C2 |
| ГИБКИЙ ПРИВОДНОЙ ЭЛЕМЕНТ | 2013 |
|
RU2644274C2 |
| ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С УСТРОЙСТВОМ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПУСКОВОГО ЭЛЕМЕНТА И СОСТОЯНИЯ КАРТРИДЖА | 2013 |
|
RU2631209C2 |
| ПОВОРОТНЫЕ ПРИВОДНЫЕ КОНСТРУКЦИИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2640002C2 |
Изобретение относится к медицине и может быть использовано в эндоскопии. Привод для инструмента эндоскопического хирургического аппарата содержит корпус и систему приводных валов, которые связаны с шарнирными узлами. В качестве управляющих механизмов концевого эффектора используют четыре независимых червячных редуктора. Каждый редуктор соединен с приводным валом системы коаксиально расположенных телескопических приводных валов. Каждый вал передает крутящий момент на соответствующий шарнирный узел. В результате создан упрощенный механизм управления приводом инструментов, сопрягаемый с управляющей частью ассистирующего мехатронного хирургического комплекса. 3 ил.
Привод для инструмента эндоскопического хирургического аппарата, содержащий корпус и систему приводных валов, связанных с шарнирными узлами, отличающийся тем, что содержит управляющие механизмы концевого эффектора, выполненные в виде четырех независимых червячных редукторов, каждый из которых соединен с приводным валом, причем приводные валы расположены коаксиально, имеют разный диаметр и длину и передают крутящий момент к соответствующим шарнирным узлам.
| US 5515478 A, 07.05.1996 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| DE 4136861 A1, 13.05.1993 | |||
| EP 0677275 A, 18.10.1995 | |||
| US 4641657 A, 10.02.1987 | |||
| US 6119913 A, 19.09.2000 | |||

