Изобретение относится к усовершенствованному способу обработки сейсмических данных, полученных от спаренных, но принципиально разнотипных сейсмоприемников, обеспечивающему подавление интерференции, возникающей вследствие реверберации в толще воды, при проведении морских сейсмических съемок на мелководных участках.
В ходе морских сейсмических съемок используют буксирование сквозь толщу воды на длинном кабеле приемников звуковых волн. Периодически источник звуковых волн вызывает ответное звучание находящихся под поверхностью воды слоев грунта, образуя отраженное поле сейсмических волн, которое фиксируется сейсмоприемниками и преобразуется в электрические сигналы, передаваемые по кабелю на судно. Сигналы записываются, а затем обрабатываются с целью визуального отображения топографии тех слоев грунта на морском дне, на которые направлены звуковые волны.
В морской среде отраженные волновые поля проявляются в виде колебаний гидродинамического давления или колебания скоростей частиц. Сейсмоприемники могут принадлежать к принципиально разным типам аппаратуры. Говоря иначе, они могут предназначаться для измерения колебаний давления (гидрофоны) или колебаний скорости частиц (геофоны). В зависимости от характера задач, которые решаются с помощью полевых исследований, на одном и том же кабеле могут находиться сейсмоприемники обоих типов либо какого-то одного из них. Реже в аналогичных условиях применяются акселерометры.
На относительных мелководьях (при глубинах порядка 8-63 м [25-200 футов] целесообразно применять так называемые "донные сейсмические косы". При этом методе сейсмоприемная коса размещается непосредственно на морском дне, а не буксируется постоянно вслед за судном, как принято на глубоководных участках моря. Оптимальный сейсмоприемной аппаратурой для измерения скоростей частиц на морском дне считаются геофоны, установленные на универсальном шарнирном устройстве. Речь идет о развертывании на дне косы из сотен или тысяч сейсмоприемников, электрические выходные сигналы которых подаются в мультиплексном режиме в соответствующие устройства регистрации данных.
На фиг. 1 показано судно 10 для укладки донного кабеля 12, который в данном случае находится на дне водоема 16 под толщей воды 14. Известно, что поверхность воды 18 образует в таких случаях отражающую сигналы границу раздела воздух-вода. Морское дно является также хорошим отражателем, хотя это свойство зависит от величины акустического импеданса. Датчик скорости (геофон) 20 и датчик давления (гидрофон) 22 размещены рядом на морском дне и соединены с различными электрическими каналами кабеля 12, через которые их сигналы поступают в установленную на судне 10 аппаратуру архивного запоминания и обработки данных (не показана). В целях упрощения изложения здесь показаны лишь два сейсмоприемника. Периодически источник 13 создает поле звуковых волн 15, которое распространяется в донный грунт 17, где происходит его последующее отражение от подповерхностных слоев и возвращение в виде поля отраженных сигналов, такого как поле 24. Источник 13 может быть запущен с борта судна 10 или с использованием отдельной морской сейсморазведочной станции (не показана).
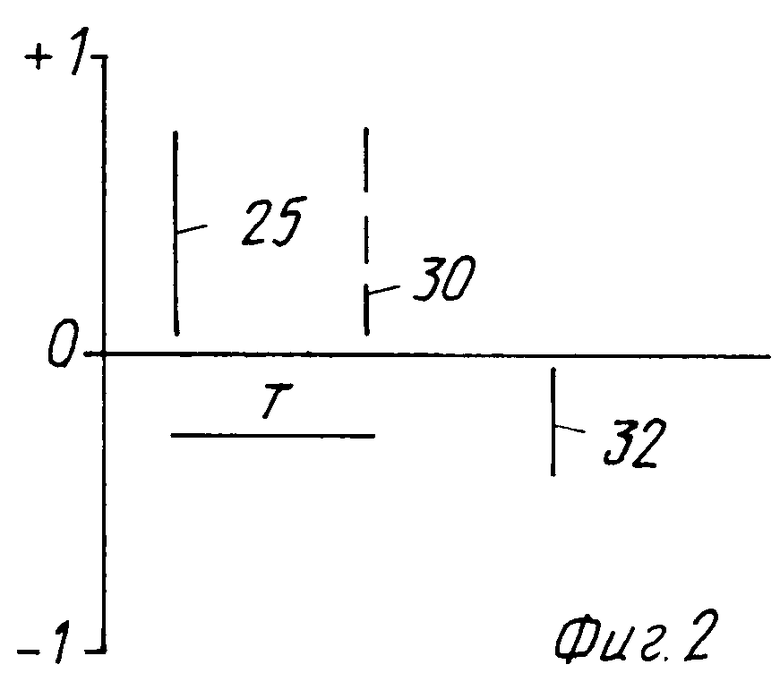
Приходящее поле 24 отраженных волн сжатия достигает установленного на дне геофона 20, который фиксирует его приход. В результате, согласно общепринятой в сейсморазведке эталонной схеме, формируется нарастающей электрический импульс 26 (фиг. 2). Отраженная волна продолжает восходящее движение, пока не достигнет границы раздела воздух - вода 18, откуда после сдвига фазы на 180o снова отразится вниз и уже в виде побочной волны попадет на геофон сверху. При нормальном ходе событий импульс сжатия, воздействующий на верхнюю часть геофона, создает уменьшающийся электрический заряд, однако с учетом обращения фазы на водной поверхности первая побочная отраженная волна формирует второй нарастающий электрический импульс 30, приведенный на фиг. 2, относительно произвольной шкалы амплитуд. В зависимости от величины акустического импеданса морского дна и сглаженности поверхности воды поля звуковых волн могут многократно переотражаться в прямом и обратном направлениях (реверберировать) между поверхностью и дном, подобно многократным переотражениям между зеркалами на противоположных стенах помещения. Вторая отраженная побочная волна формирует отрицательный импульс 32. Последующие импульсы чередуются по знаку, принимая то положительную, то отрицательную полярность. Реверберационные явления наблюдаются в водонасыщенных средах, например в прибрежном песке при низком приливе или в зыбучих песках.
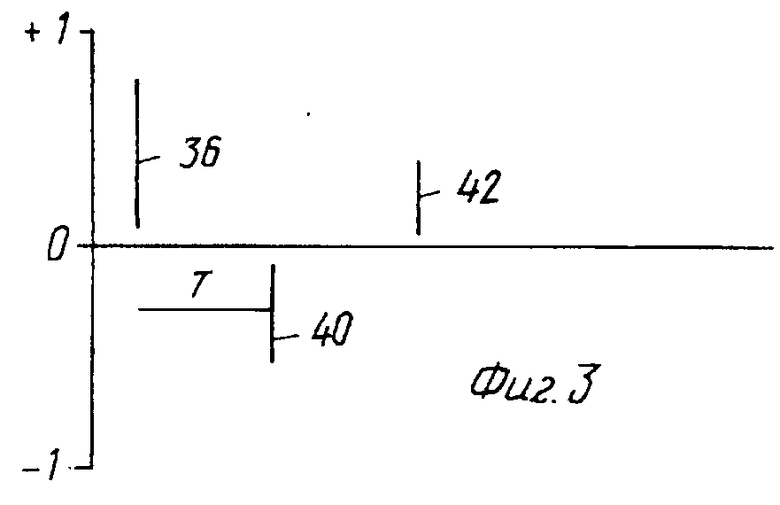
Гидрофон 22 воспринимает переходящее отраженное поле волн сжатия и фиксирует его приход в виде импульса сжатия. И снова, по общепринятому отраслевому стандарту, гидрофон преобразует импульс сжатия в нарастающий электрический импульс такой, как импульс 36 на фиг. 3, изображенный относительно той же самой произвольной шкалы амплитуд, что и на фиг. 2. Первая отраженная от поверхности побочная волна движется по направлению вниз в виде импульса разрежения, который улавливается гидрофоном 22 как электрический импульс 40 отрицательной полярности. Благодаря второму отражению от дна к поверхности, вторая отраженная побочная волна имеет положительный знак, а последующие волны будут поочередно иметь то положительную, то отрицательную полярности.
Интервал времени между импульсами τ определяется произведением удвоенной кажущейся глубины водной толщи на величину, обратную скорости воды (1/v). При нормальном падении, которое имеет место в точках 28 и 38 (фиг. 1), кажущаяся глубина воды является ее истинной глубиной. Во всех остальных случаях, например для волнового поля 44 и пути 45, кажущаяся глубина представляет собой произведение удвоенной глубины водной толщи и обратной величины скорости воды, деленное на косинус угла падения α .
Таким образом, геофоны фиксируют поступление первой отраженной волны и первой побочной волны в виде электрических импульсов одинаковой полярности, в то время как гидрофоны воспринимают поступление первой отраженной волны и первой побочной волны в виде разнополярных электрических импульсов. Поэтому использование двух спаренных разнотипных сейсмоприемников при сочетании их отличительных характерных признаков должно создавать условия, позволяющие усиливать энергию первой приходящей волны и подавлять последующие кратные волны реверберации. Второе преимущество основано на том, что случайные помехи, воспринимаемые разнотипными сейсмоприемниками, не обязательно должны быть одинаковыми либо коррелируемыми.
Для успешного совмещения сигнала гидрофона и геофона необходимо преобразовать сигналы одного из этих типов сейсмоприемников таким образом, чтобы они соответствовали сигналам сейсмоприемников другого типа. Их передаточные функции должны быть согласованы по фазе, амплитуде, частоте и затуханию.
Наиболее целенаправленным способом такого пересчета будет способ, включающий демультиплексирование набора зарегистрированных сейсмических данных от двух сейсмоприемников, устранение инструментальных эффектов усилений сигналов и уравновешивание сигналов по амплитуде с помощью идентичных функций восстановления амплитуды для обоих наборов данных. Соотношение амплитуд соответствующих первых приходящих сигналов определяет коэффициент пересчета. Однако, если учесть наличие помех и других возмущений, то данный метод представляется сверхупрощенным.
Известна электрическая сеть для согласования передаточной функции акселерометра или гидрофона с передаточной функцией геофона [1].
Известен детерминированный алгоритм расчета передаточной функции, позволяющий согласовывать гидрофоны и геофоны, компенсируя дефекты согласования этих сейсмоприемников с морским дном [2]. Такой способ требует наличия специального калибровочного волнового поля, генерируемого путем взрыва, произведенного прямо над выбранными расположенными рядом сейсмоприемниками. По времени калибровочный взрыв, как правило, непосредственно предшествует началу сейсмической съемки.
Известна компьютерная программа для получения коэффициента пересчета для съемки с использованием гидрофона, совмещенного с геофоном, с целью ослабления ревербераций в столбе воды [3]. Сейсмоприемники устанавливаются в какой-либо точке водной толщи выше уровня дна либо на самом дне. Коэффициент пересчета, который определяется из акустического импеданса воды или морского дна, можно рассчитать как детерминированно, так и статистически. В первом случае применяется калибровочный взрыв, который производится непосредственно над сейсмоприемниками, как в ранее приведенном источнике. Статистические способы не связаны с какими-либо конкретными требованиями к местоположению взрыва относительно сейсмоприемников, что составляет непременное требование при использовании детерминированного способа. Статистические способы основаны на итерационном расчете соотношений между различными сочетаниями функций автокорреляции и кросскорреляции волновых пакетов, зарегистрированных соответствующими сейсмоприемниками. С учетом разностей времен прихода волн с различными траекториями могут вноситься поправки на направленность волновых полей.
Адаптивная фильтрация помех - понятие, которое будет введено позже, объясняется в работе Бернарда Видроу и др. "Адаптивное подавление помех: принципы и применения", опублик. в "Трудах ИЕЕЕ", т. 63, N 12, декабрь 1975, с. 1692 - 1716.
Недостатки приведенных известных способов расчета коэффициента пересчета связаны, во-первых, с проблемой случайных помех. В частности, датчики скорости (геофоны) создают гораздо более высокий уровень помех по сравнению с гидрофонами. Что же касается статистических способов, то помехи геофонов неизбежно искажают результаты процессов коррелирования. Во-вторых, в итерационном процессе определения коэффициента пересчета на основе соотношений кросскорреляции и автокорреляций не содержится указания на коэффициент сходимости, который позволил бы точно установить оптимально пригодный коэффициент пересчета. Кроме того, простое суммирование данных, полученных от двух сейсмоприемников, как рекомендовано в этом источнике, обусловливает уменьшение отношения сигнал - шум для результата суммирования по сравнению с аналогичным отношением для гидрофона.
В дальнейшем изложении будут неоднократно встречаться ссылки на "скорость воды" и "характерный признак (сигнатура) скорости". При отсутствии каких-либо иных специально оговоренных значений термин "скорость" - это условный рабочий термин, означающий скорость частиц определенной среды (грунта или воды), возникающую при прохождении поля сейсмических волн через данную среду. Если же термин "скорость" будет употребляться в каком-либо ином смысле, то это его значение будет оговорено особо. Термины "характерный признак сжатия", "характерный признак помех" и "характерный признак скорости" относятся к количественным колебаниям уровня амплитуд соответствующих параметров как функции времени. Собирательный термин "характерный признак помех" или "характеристика помех" включает все и любые нежелательные сигналы, в то же время две другие отличительные характеристики "сжатие" и "скорость" относятся к искомым сейсмическим сигналам, полезным при сейсморазведке.
Таким образом, существует потребность в усовершенствованном способе статистического определения коэффициента взаимного пересчета ответных импульсов гидрофона и геофона, которых не будут искажать помехи. Кроме того, имеется потребность в способе позитивного определения коэффициента сходимости для определения оптимального коэффициента пересчета и снижения влияния помех в геофоне на суммарные данные.
В изобретении предлагается усовершенствованный способ обработки сейсмических данных с целью подавления ревербераций в столбе воды. В соответствии с предлагаемым способом в водоеме создается отраженное волновое поле, характеризующееся признаками сжатия и скорости, которые включают также фоновый шум. Характеристики сжатия и скорости обнаруживаются одновременно в выбранных соседних местоположениях. Характеристика помех геофона рассчитывается адаптивно на основе характеристик скорости и сжатия. Полученная характеристика помех суммируется с характеристикой скорости, но с противоположной полярностью, образуя не содержащую помех характеристику скорости. К такой уточненной характеристике скорости применяется выбранный коэффициент пересчета, после чего пересчитанная уточненная характеристика скорости суммируется с характеристикой сжатия. Затем выполняется автокорреляция полученной суммарной характеристики.
Для суммарной характеристики рассчитывается варимаксная функция. Перечисленные шаги повторяются несколько раз, причем величина коэффициента пересчета увеличивается при каждой итерации, пока варимаксная функция не приблизится максимально к единице.
В одном из аспектов этого изобретения на этапе выделения помех предусматривается включение операции адаптивного подавления сигнала, обусловленного фоновым шумом.
На фиг. 1 изображена иллюстрация расположения двух разнотипных сейсмоприемников на дне мелководного участка моря; на фиг. 2 - ответный сигнал датчика скорости на первичные отражения и отраженные побочные волны; на фиг. 3 - ответный сигнал датчика давления на первичные отражения и отраженные побочные волны; на фиг. 4 - схема, иллюстрирующая логику адаптивного выделения помех, а также адаптивный фильтр, действующий в направлении от гидрофона к геофону; на фиг. 5 - последовательность операций, характеризующая способ пересчета сигналов датчика скорости в сигналы датчика давления; на фиг. 6 - блок-схема предпочтительного способа осуществления обработки.
На первый взгляд может показаться, что суммирование выходных сигналов геофона с выровненными по амплитуде выходными сигналами гидрофона способно подавить многократные отражения. Однако эта проблема имеет несколько более сложное решение. Геофонам внутренне присущ высокий уровень помех по сравнению с гидрофонами. Именно этот уровень помех тем или иным способом необходимо устранить. Сигналы, показанные на фиг. 2 и 3, идеализированы в виде функций Дирака, тогда как на самом деле эти сигналы состоят из идеализированного колебания, свернутого с колебаниями переходного процесса, отображающими передаточную функцию сейсмоприемников.
В последующем изложении предполагается, что и данные представлены в форме дискретных выборок, индексированных в функции времени распространения отраженных волн.
Обработка начинается с фильтрации характеристики давления гидрофона для адаптивного получения оптимальной оценки характеристики скорости геофона. Затем оптимальную расчетную величину характерного признака скорости геофона вычитают из соответствующей реальной характеристики геофона, в которую включен также шумовой фон. В результате этой операции произойдет подавление соответствующей характеристики (полезного сигнала) геофона, в результате практически в чистом виде выделяется характеристика помех. Параллельно осуществляют временное запоминание первоначального реального зашумленного сигнала геофона. После выделения характеристики помех (шумового сигнала) считывают первоначальный реальный зашумленный сигнал геофона из устройства запоминания и вычитают из него соответствующую характеристику помех, чтобы получить незашумленный "чистый" сигнал геофона. К чистому сигналу геофона итерационно применяют коэффициент пересчета, после чего сигнал геофона суммируют с сигналом гидрофона, и при каждой очередной итерации выполняют автокорреляцию получаемой суммы. Величину коэффициента пересчета соответственно определяют, исходя из исследования основного и первого бокового лепестков автокорреляционной функции. Итерации проводятся до тех пор, пока не будет максимизирована соответствующая мера приемлемости получаемого результата.
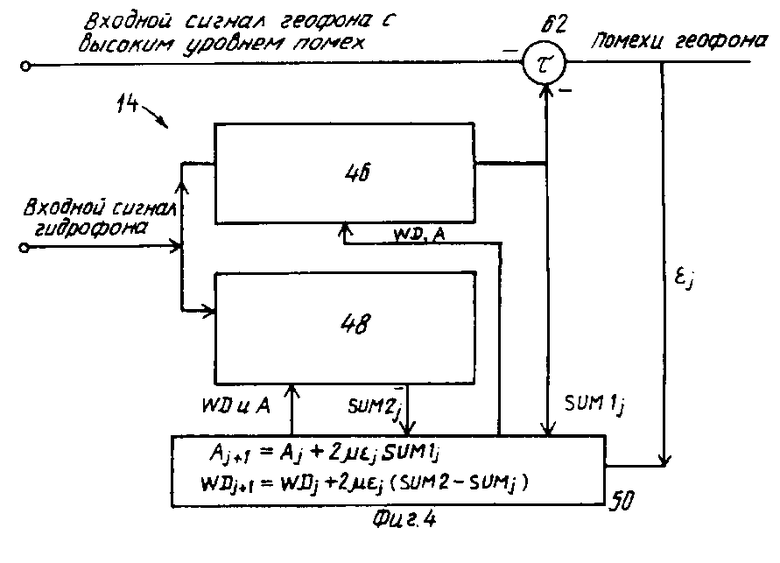
На фиг. 4 показан в общем виде контур адаптивного выделения помех, который работает по каждой выборке данных как функции индекса j, времени - выборки. Фильтр 47 преобразования сигналов от гидрофона к геофону включает блоки 46 и 48, в состав которых по каждой новой выборке входит адаптивный фильтр, аналогичный широко известному фильтру Винера. Фильтр обеспечивает оценку скорости по амплитуде, фазе, частоте и затуханию. Сигнал гидрофона вводится на вход блока 46 фильтра 47, где осуществляется его свертка с оценкой глубины воды WDj и динамической амплитудной характеристикой фильтра Aj с образованием оценки сигнала геофона SUMj. Вслед за тем SUMj комбинируется путем вычитания (субтрактивно) с входным сигналом геофона, имеющим высокий уровень помех, в точке суммирования 52. На выходе получаются почти в чистом виде помехи геофона εj, которые вводятся в блок 50 фильтра 47. При обработке используется коэффициент усиления μ цепи обратной связи. Величина коэффициента усиления цепи обратной связи находится в пределах узкого диапазона значений от нуля до 0,01. При коэффициенте усиления, равном нулю, фильтр прекращает функционировать. Если коэффициент усиления чересчур велик, фильтр становится неустойчивым. Поэтому необходимо настраивать коэффициент усиления цепи обратной связи, чтобы обеспечить нужную степень адаптивности. Производится приращение кажущейся глубины водной толщи для формирования нового фильтра преобразования сигналов от гидрофона к геофону. С использованием нового фильтра процесса свертки процесс свертки в блоке 48 повторяется. Если разность Δ WD результатов первоначального и обновленного фильтров улучшает оценку сигнала геофона, то опытное значение приращения глубины водной толщи принимается постоянным в подобных расчетах.
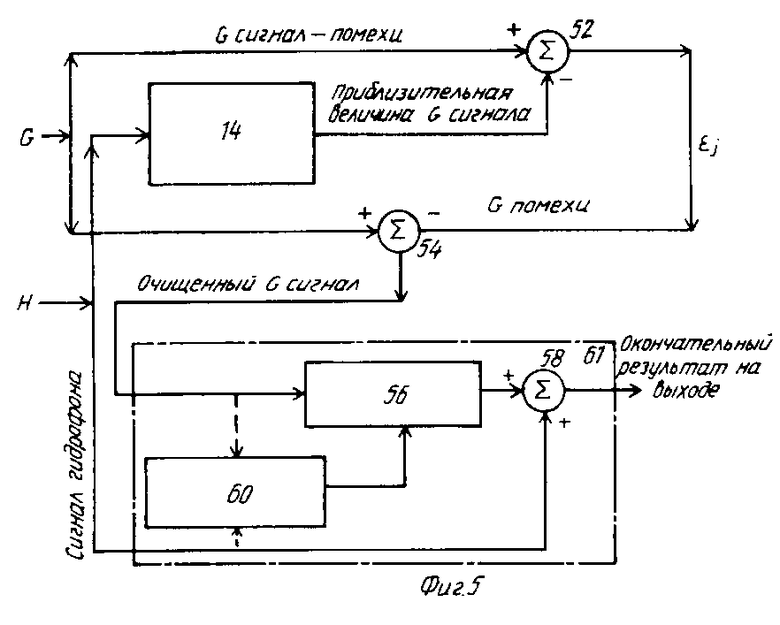
На фиг. 5 G обозначает зашумленный входной сигнал геофона (характеристика скорости), H представляет соответствующий входной сигнал гидрофона (характеристика давления). Почти чистый шумовой сигнал εj, не загрязненный полезным сигналом, вводится с противоположным знаком в зашумленный входной сигнал геофона G ("Сигнал + Помеха") в блоке 54 для получения чистого сигнала геофона, который на фиг. 5 обозначен как "Очищенный сигнал G".
В блоке 56 к сигналу геофона применяется коэффициент пересчета, и результат прибавляется в блоке суммирования 58 к сигналу гидрофона (порядок применения может быть обратным) для получения окончательной величины на выходе. Коэффициент пересчета определяется в блоке 60.
При заданных выборках из соответствующих наборов данных гидрофона и геофона, отсортированных на базе равноудаленных приемников и выровненных по амплитуде, выбирают окно зарегистрированных сигналов, которые характеризуются довольно чистым сигналом высокого уровня. Определяют значение коэффициента пересчета для уточненного сигнала, геофона, полученного на основе выбранных записей сигналов и с использованием этого коэффициента пересчета суммируют полученные величины с соответствующими зарегистрированными сигналами гидрофона. Осуществляют автокорреляционную обработку результата суммирования. Рассчитывают коэффициент сходимости и выполняют итерационную процедуру обработки, с каждой итерацией задавая приращения коэффициенту пересчета, пока не будет пройден весь необходимый диапазон коэффициентов пересчета. Для получения коэффициента пересчета для обработки всей выборки выбирают то значение коэффициента пересчета, которому соответствует максимальная величина коэффициента сходимости, т. е. значение, которое максимально приближено к единице.
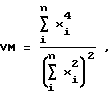
Расчет коэффициента сходимости наиболее удобно выполняется на основе варимаксной функции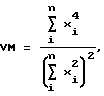
где
xi; i = 1, 2, 3,..., n,
есть последовательность дискретных выборок данных в пределах выбранного временного окна по функции автокорреляции, включающей область, в которой следует ожидать появления центрального и первых боковых лепестков функции автокорреляции. Если, как показано на фиг. 2 и 3, x представляет собой дискретный всплеск, то VM = 1. Значение VM уменьшается по мере того, как отклик волнового поля все менее напоминает дискретный всплеск.
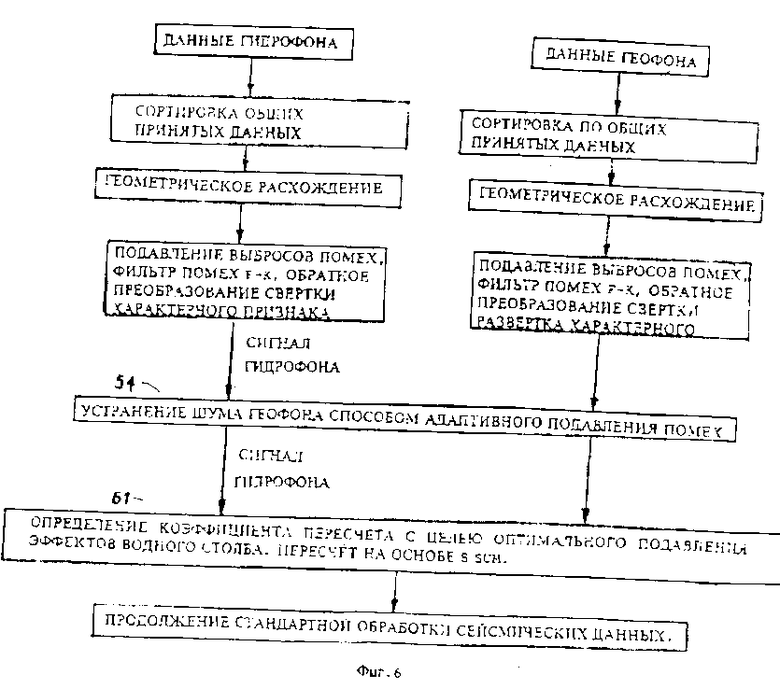
Блок-схема предпочтительного способа обработки приведена на фиг. 6. Каждый из наборов данных гидрофона и геофона сортируется по общим принимаемым выборкам. Эти данные затем преобразуются в соответствии с инверсным значением коэффициента усиления, выравниваются по амплитуде и корректируются на геометрическое расхождение обычными методами. Частично обработанные данные проходят дальнейшую обработку, предусматривающую исключение шумовых выбросов, фильтрацию (f - k) шумов и обратное преобразование свертки. Все вышеприведенные операции выполняются в соответствии со стандартными процедурами. В блоке 54 процедура адаптивного подавления помех применяется к наборам данных по способу, объяснение которого приводилось со ссылками на фиг. 4 и 5. В блоке 61 осуществляется пересчет данных относительно друг друга способом, объяснение которого приводилось со ссылками на фиг. 5, с использованием наилучшей оценки коэффициента пересчета, который определяется по максимальному значению коэффициента корреляции VM.
Следует иметь в виду, что, хотя способ был описан в отношении сейсмоприемной косы, уложенной на морское дно, его можно применять при морских сейсмических съемках любых других типов, а также при проведении работ в так называемых переходных зонах, где реверберация может иметь место в массе насыщенного влагой берегового песка. Неоднократно упоминалась операция пересчета сигналов геофона в сигналы гидрофона. При этом следует иметь в виду, что в принципе можно выполнить и обратный процесс, т.е. пересчет сигналов гидрофона и их согласование с сигналами геофона. Характеристика конкретных аспектов способа приводится здесь в целях иллюстрации на примерах, без каких-либо ограничений сущности и объема изобретения.
Использование: для ослабления эффектов реверберации на сейсмические волновые поля с высоким уровнем помех, записанных изнутри водонасыщенной среды. Сущность изобретения: волновое поле появляется в виде характерного признака сжатия и характерного признака скорости, в котором содержится характерный признак фонового шума. Признак сжатия адаптивно фильтруется и субтрактивно (в режиме вычитания) комбинируется со скоростным признаком, в результате чего удается выделить почти в чистом виде характерный признак помех. Этот последний почти в чистом виде вновь складывается с первоначальным характерным признаком скорости, но с противоположным знаком, чтобы исключить влияние фонового шума и получить уточненный и очищенный характерный признак скорости. Производится итерационный пересчет уточненного скоростного признака и его суммирование с характерным признаком сжатия при постоянном увеличении коэффициента пересчета при каждой итерации и автокорреляции полученной суммы. После каждой операции суммирования выполняется расчет коэффициента сходимости, и полученная в результате величина коэффициента сходимости, максимально близкая к единице, определяет оптимальный коэффициент пересчета. 9 з.п. ф-лы, 6 ил.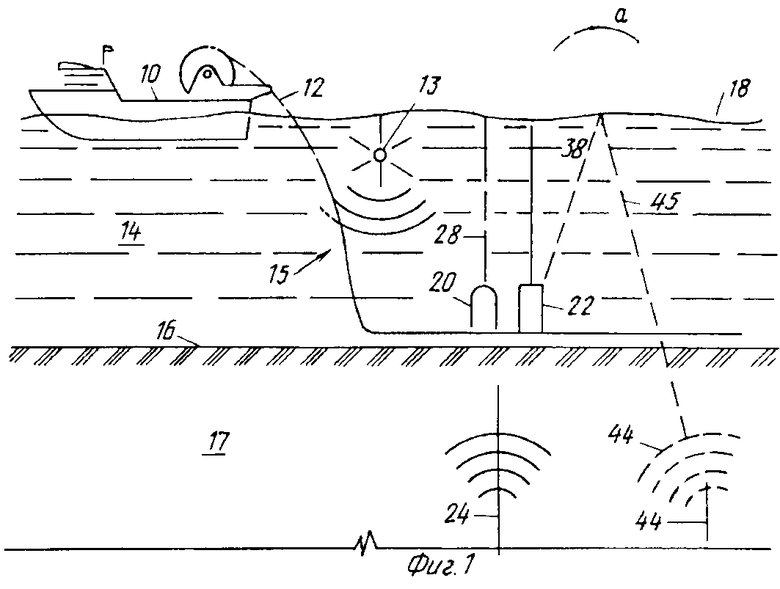
где xi, i = 1,2,3,...,n,
есть последовательность дискретных выборок данных, взятых в пределах избранного временного окна по упомянутой автокорреляционной функции, причем окно включает в себя главный и первый боковые лепестки автокорреляционной функции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4253164, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 5163028, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 4979150, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
