ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем, к считыванию компонент акустической волны, распространяющейся в текучей среде: давления и до трех ортогональных компонент движения частиц. В частности, оно относится к датчику, предназначенному для считывания акустической волны, не реагируя на движение держателя датчика. Кроме того, оно относится к считыванию акустической волны, не реагируя на поток акустической среды, проходящий мимо датчика. Изобретение может быть использовано для обнаружения звука в морской среде. Вследствие этого изобретение может быть применено для морской сейсморазведки и, в частности, для устройств и способов, снижающих влияние нежелательных сейсмических отражений, которые представляют собой акустические волны, распространяющиеся в текучей среде, в датчиках, буксируемых сзади разведочного судна, или в датчиках, лежащих на морском дне.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
В морской сейсморазведке с буксируемой сейсмоприемной косой вблизи поверхности моря сзади морского судна буксируется группа гидрофонов. Гидрофоны постоянно находятся в кабелях с рядом датчиков, обычно называемых сейсмоприемными косами. Сейсмический источник, также буксируемый вблизи поверхности моря, периодически излучает акустическую энергию. Эта акустическая энергия движется вниз через толщу морской воды, отражается от нижележащих геологических структур и возвращается вверх через толщу морской воды к группе гидрофонов. Группа гидрофонов регистрирует движущиеся от морского дна вверх сейсмические акустические упругие волны. Зарегистрированная гидрофонами информация далее преобразуется в сейсмические изображения нижележащих геологических структур.
Акустическое полное сопротивление представляет собой отношение давления к скорости частиц и равно произведению плотности ρ на скорость звука с в акустической среде, ρс. Каждый раз, когда звуковые волны встречают изменение акустического полного сопротивления, возникают отражения. Чем больше изменение акустического полного сопротивления, тем больше энергии отражается. Ввиду того, что акустическое полное сопротивление воздуха и воды сильно различаются, поверхность моря является почти идеальным отражателем звуковой энергии. Энергия, вернувшаяся назад после отражения от морского дна или объекта разведки, снова отражается от поверхности моря назад, по направлению к группе гидрофонов. Ввиду того, что гидрофон имеет всенаправленную пространственную характеристику, группа гидрофонов регистрирует волну-спутник, представляющую собой сейсмическую акустическую волну, отраженную от поверхности моря и прибывающую с задержкой во времени с обратной полярностью по отношению к прямому отражению. Волна-спутник является распространяющейся вниз сейсмической акустической волной, которая, при добавлении ее к искомой волне, отрицательно сказывается на зарегистрированном сейсмическом изображении.
Волна-спутник создает провал в частотном спектре отклика гидрофона на частоте fnotch=c/2d, где с - скорость и d - глубина группы гидрофонов. Группы сейсмических гидрофонов принято буксировать на глубинах порядка 10 м или менее. На глубине 10 м частота (fnotch) заграждения фильтра-пробки равна 75 Гц. Для получения высокого разрешения сейсмического изображения требуется продолжение частотной характеристики за пределами частоты 100 Гц. Поэтому группы гидрофонов иногда буксируют на меньших глубинах, чтобы улучшить разрешение сейсмического изображения.
Отражение, вызывающее волну-спутник, может также продолжаться до морского дна или другой сильной отражающей границы и отражаться в обратном направлении, оказывая мешающее воздействие на искомые отражения и ухудшая качество изображения. Эти отражения принято называть кратными волнами.
Буксирование на малых глубинах является проблематичным из-за того, что помехи от поверхности моря оказывают мешающее действие на искомые сейсмические сигналы. Кроме того, круговые водяные течения вблизи поверхности моря могут вызывать увеличенный гидравлический шум в поверхностном слое морской буксируемой косы. При ухудшении погодных условий эти эффекты усугубляются, иногда вынуждая команду приостанавливать работы до улучшения погодных условий. Чем больше глубина буксирования, тем меньше помехи от поверхности моря и меньше сказываются погодные условия. Если бы можно было исключить влияние провалов из-за волн-спутников, то желательно осуществлять буксирование на большей глубине.
Системы морской сейсморазведки с донными косами, в которых датчики устанавливаются на морском дне, подавляют волны-спутники методом, известным под названием суммирование p-z. В акустической волне давление р является скалярной величиной, а скорость и частиц под действием акустической волны является векторной величиной. Гидрофон регистрирует давление р сейсмической акустической волны положительной всенаправленной пространственной реакцией. Вертикально ориентированный геофон или акселерометр регистрирует вертикальную составляющую скорости uz частиц сейсмической акустической волны положительным откликом на восходящие сигналы и отрицательным откликом на нисходящие сигналы. При суммировании p-z сигнал скорости масштабируется по акустическому полному сопротивлению ρс морской воды и складывается с сигналом давления. Если используется акселерометр, то его выходной сигнал может быть интегрирован, чтобы получить сигнал скорости, или сигнал давления гидрофона может быть дифференцирован для того, чтобы он был лучше согласован по спектру с акселерометром. Это дает сложный датчик, который имеет полную реакцию на волну, распространяющуюся вверх, и нулевую реакцию на волну, распространяющуюся вниз, в целях подавления волны-спутника и кратных волн. Один такой способ предварительного формирования сигналов и объединения сигналов для получения одной записи с подавлением волн-спутников описан в патенте США №6539308, выданном на имя Монк и др. Этот и аналогичные ему методы хорошо работают тогда, когда на датчик скорости частиц акустической волны или акселерометр не оказывают отрицательного влияния нежелательные движения из-за факторов, вызванных не искомым сигналом. Такие нежелательные ускорения - распространенное явление в донной системе, размещенной в прибойной зоне или области, когда там имеются сильные глубинные течения.
В последнее время проявляется интерес к использованию комбинации гидрофонов и датчиков движения частиц для уменьшения влияния волн-спутников в сейсмоприемной косе. Управление работой датчика движения частиц в сейсмоприемной косе представляет проблему ввиду того, что сейсмоприемная коса испытывает действие ускорений из-за буксирования и влияния поверхности моря, которые велики в сравнении с ускорениями, вызываемыми искомыми сейсмическими отражениями. Кроме того, эти нежелательные ускорения заключены в той же спектральной полосе, что и искомый сейсмический отраженный сигнал.
Все сейсмоприемные косы и донные сейсмические кабели испытывают углы крена от 0° до 360° и умеренные углы наклона. Для внедрения вертикально ориентированного геофона используются донные системы: (а) электродинамический геофон на карданном подвесе; (b) 3-компонентный всенаклонный электродинамический геофон с наружным определением пространственного положения и осуществлением вычислительных операций снаружи датчика для разрешения измерения относительно гравитации; и (с) 3-компонентный акселерометр микроэлектромеханической системы (МЭМС) с внутренним определением пространственного положения и осуществлением вычислительных операций снаружи датчика для разрешения измерения относительно гравитации.
В патенте США №7167413, выданном на имя Рукетт, описано использование акселерометрического датчика движения частиц акустических волн в сейсмоприемной косе для подавления эффекта образования провала в спектре из-за волн-спутников. Рукетт предлагает использовать систему защиты от вибраций типа масса-пружина для уменьшения влияния динамического смещения кабеля на акселерометр и тензометрическую систему, чтобы произвести измерение и подавить действующую на акселерометр помеху, вызванную остаточным смещением кабеля. Система, предлагаемая Рукеттом, основывается на широко известных механических взаимосвязях, которые не остаются постоянными при производственных допусках, старении и условиях окружающей среды. Рукетт предлагает использовать адаптивный алгоритм обработки сигналов для получения расчетным путем зависимости системы масса-пружина от ускорения, действующего на акселерометр на месте его эксплуатации. Динамическое сотрясение акселерометра, вызываемое турбулентным потоком акустической среды, проходящим мимо датчика, обрабатывается таким же образом, как и динамическое смещение кабеля, и удаляется из измеренного значения движения частиц акустической волны. Рукетт описывает сложную электронно-механическую систему.
В патенте США №7239577, выданном на имя изобретателей Тенгхэм и др., описываются устройство и способ для устранения провала, вызванного волной-спутником, с использованием датчика скорости частиц акустической волны. Тенгхэм и др. предлагают использовать геофон на карданном подвесе с жидкостным демпфированием. В данной области техники известно, что текучая среда, герметизирующая геофон, выбирается таким образом, чтобы обеспечивать демпфирование датчика, качающегося на своих карданных подвесах. Хотя в патенте на имя Тенгхэм и др. это и не указывается, в рассматриваемой области техники известно, что система защиты от вибраций типа масса-пружина может обеспечивать уменьшение влияния динамики кабеля на характеристику геофона. Но динамическое сотрясение геофона, вызываемое турбулентным потоком акустической среды, проходящим мимо датчика, в патенте на имя Тенгхэм и др. не рассматривается. Движение геофона, вызываемое динамикой кабеля и турбулентным потоком акустической среды, проходящим мимо кабеля, в отклике геофона неотличимо от движения частиц акустической волны. В техническом решении, предлагаемом Тенгхэм и др., искомое движение частиц сейсмической волны маскировано динамическим смещением кабеля и движением, вызываемым турбулентным потоком.
В патенте США №7359283, выданном на имя Вааг и др., описывается способ объединения датчиков давления и датчиков движения частиц, учитывающий влияние динамического смещения кабеля и турбулентного потока на датчики движения частиц. В этом способе выходной сигнал датчика движения частиц ниже определенной частоты f0 не используется, но он рассчитывается исходя из выходного сигнала датчика давления и известной глубины, на которой находится датчик давления. Подавляются те частоты, на которых ожидается динамическое смещение сейсмоприемной косы и на которых проходящий мимо датчика турбулентный поток акустической среды вызывает сотрясение датчика. Расчетный выходной сигнал имеет неудовлетворительное отношение сигнал/шум на нижних частотах, представляющих интерес. Это подавление ниже определенной частоты является неоптимальным решением, поскольку подавляются также полезные сигналы в важном диапазоне низких частот, где вероятно присутствие сейсмических данных о глубокозалегающих объектах исследований.
Несмотря на то что во всех вышеупомянутых патентах описаны способы подавления в сейсмоприемной косе провала, обусловленного влиянием волн-спутников, с использованием измерений многокомпонентных сейсмических волн, общим их недостатком является недостаточный учет влияния движения держателя датчика, буксирования датчика через акустическую среду и движения акустической среды по датчикам многокомпонентных акустических волн. К тому же общим их недостатком является отсутствие высококачественных компонентов считывания акустических волн с хорошим отношением сигнал/шум вплоть до нижних частот, представляющих интерес.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Эти недостатки устраняются с помощью датчика движения частиц подводных акустических волн, в котором воплощены особенности изобретения. Датчик движения частиц акустических волн содержит жесткий корпус, имеющий периферию, вокруг которой происходит дифракция подводных акустических волн, датчик градиента давления дифрагированной волны и движения частиц акустической волны, соединенный с жестким корпусом, и датчик движения жесткого корпуса. Датчик градиента давления дифрагированной волны и движения частиц акустической волны считывает дифрагированную акустическую волну и далее формирует выходной сигнал первого датчика, чувствительный к движению частиц акустической волны и движению жесткого корпуса. Датчик движения жесткого корпуса, который прикреплен к жесткому корпусу, формирует выходной сигнал второго датчика, который почти полностью соответствует движению жесткого корпуса. В различных подводных системах жесткий корпус может быть соединен непосредственно с подводным кабелем, с внешним устройством, прикрепленным к подводному кабелю, или с автономным подводным транспортным средством.
Согласно другой особенности изобретения датчик градиента давления подводной дифрагированной волны, в котором реализованы особенности изобретения, содержит жесткий корпус, имеющий периферию, окружающую центральную продольную ось симметрии, и первую группу углублений, расположенных на окружности с интервалами и открывающихся к периферии, и вторую группу углублений, расположенных на окружности с интервалами вокруг периферии. Вторая группа углублений смещена в продольном направлении относительно первой группы. В каждом из углублений находится датчик давления. Жесткий корпус дифрагирует подводные акустические волны вокруг периферии жесткого корпуса.
Согласно еще одной особенности изобретения способ определения отклика на акустические волны, распространяющиеся в текучей среде, реализующий особенности изобретения, включает: (а) прием сигналов акустического давления от ряда датчиков давления, установленных на периферии жесткого корпуса, расположенного в текучей среде и дифрагирующего акустические волны вокруг периферии; (b) формирование из сигналов акустического давления сигналов градиента давления, которые включают отклики на акустические волны, отклики на движение жесткого коруса и отклики на поток текучей среды мимо датчиков давления в жестком корпусе; (с) прием сигналов движения жесткого корпуса датчиком движения, соединенным с жестким корпусом; (d) формирование сигналов датчика движения, которые включают отклики на движение жесткого корпуса и отклики, вызываемые прохождением потока текучей среды мимо датчика движения; и (е) объединение сигналов градиента давления и датчика движения с формированием в результате выходного сигнала, который включает отклик на акустические волны и является по существу независимым от сигналов, соответствующих движению жесткого корпуса или потоку текучей среды мимо датчиков давления и движения. Данные, соответствующие некоторым из сигналов, получаемых датчиками или формируемых согласно предлагаемому способу, могут быть сохранены на машиночитаемом носителе данных для последующей обработки.
Согласно следующей особенности изобретения датчик подводных акустических волн, в котором реализованы особенности изобретения, включает в себя датчик градиента давления и движения частиц акустической волны, который содержит датчики давления акустических волн, расположенные в фиксированных относительно друг друга положениях. Каждый из датчиков давления акустических волн имеет индивидуальный частотный отклик, и эти отклики объединяются для формирования частотного отклика по градиенту давления. Индивидуальные частотные отклики датчиков давления акустических волн достаточно точно согласованы в пределах рабочего диапазона частот, чтобы ослабить частотный отклик по градиенту давления на давление акустической волны до более низкого уровня, чем частотный отклик по градиенту давления на движение частиц акустической волны.
Согласно следующей особенности изобретения датчик подводных акустических волн, в котором реализованы особенности изобретения, содержит жесткий опорный корпус, имеющий наружную периферию и углубления, открывающиеся к периферии в местах, расположенных на равном расстоянии друг от друга, и ряд датчиков давления, размещенных в углублениях в местах, расположенных на равном расстоянии друг от друга, с образованием датчика градиента давления. Частотные отклики датчиков давления в диапазоне рабочих частот согласованы по амплитуде и фазе.
Согласно еще одной особенности изобретения способ формирования датчика градиента давления подводных акустических волн, обладающего функциональными возможностями датчика движения частиц, в котором реализованы признаки изобретения, включает: (а) прием первого и второго сигналов давления от первого и второго датчиков давления акустических волн, прикрепленных к жесткому корпусу в местах, расположенных на расстоянии друг от друга; (b) формирование сигнала градиента давления исходя из разности первого и второго сигналов давления; и (с) согласование частотных откликов первого и второго сигналов давления в рабочем диапазоне частот для ослабления в сигнале градиента давления отклика на давление акустической волны до более низкого уровня, чем величина отклика на движение частиц акустической волны.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Вышеупомянутые особенности и признаки изобретения очевидны из приведенного ниже подробного описания изобретения, формулы изобретения и прилагаемых чертежей, на которых:
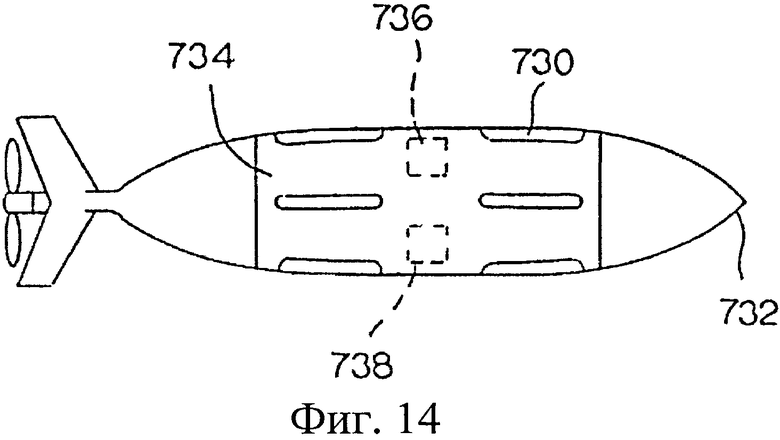
Фиг.1 - вид сбоку и два вида в поперечном разрезе одного варианта конструктивного исполнения многокомпонентного датчика распространяющихся в текучей среде акустических волн, в котором реализованы признаки изобретения.
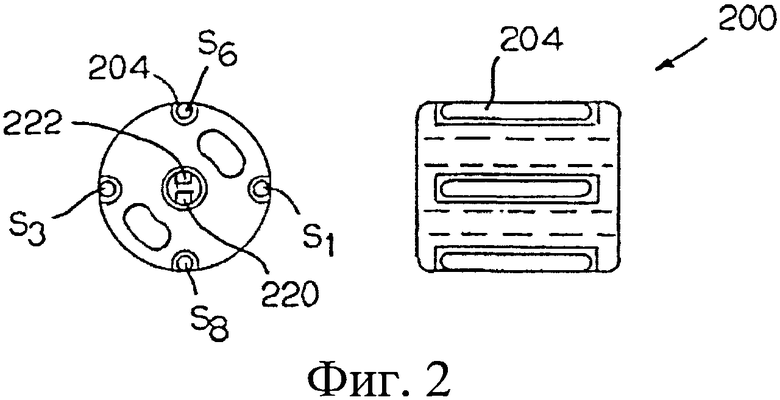
Фиг.2 - вид сбоку и вид в поперечном разрезе другого варианта конструктивного исполнения многокомпонентного датчика, имеющего четыре датчика давления.
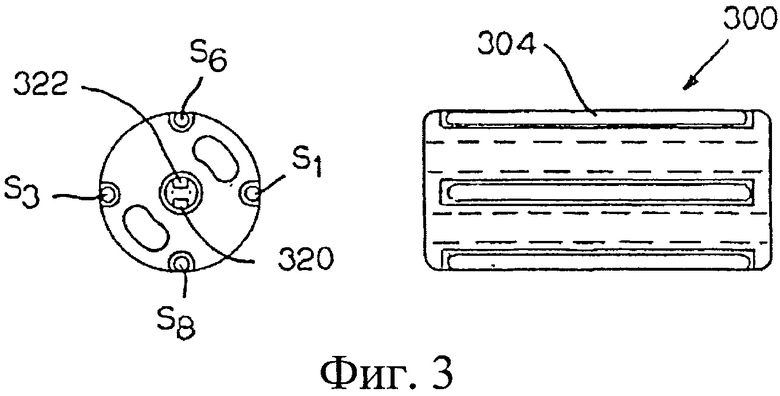
Фиг.3 - вид сбоку и вид в поперечном разрезе еще одного варианта конструктивного исполнения многокомпонентного датчика, имеющего четыре более длинных датчика давления.
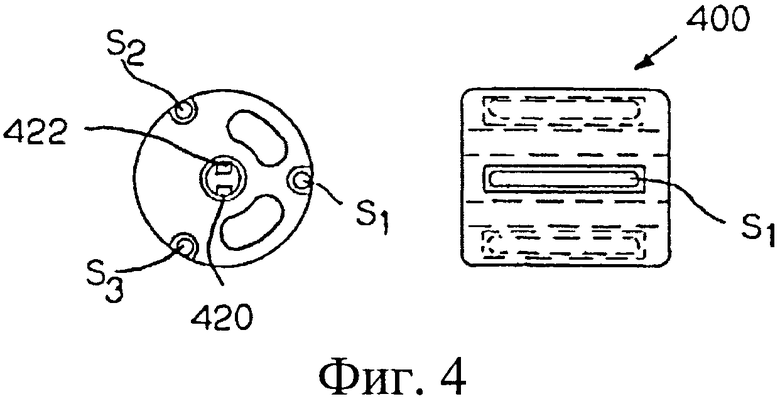
Фиг.4 - вид сбоку и вид в поперечном разрезе следующего варианта конструктивного исполнения многокомпонентного датчика, имеющего лишь три датчика давления.
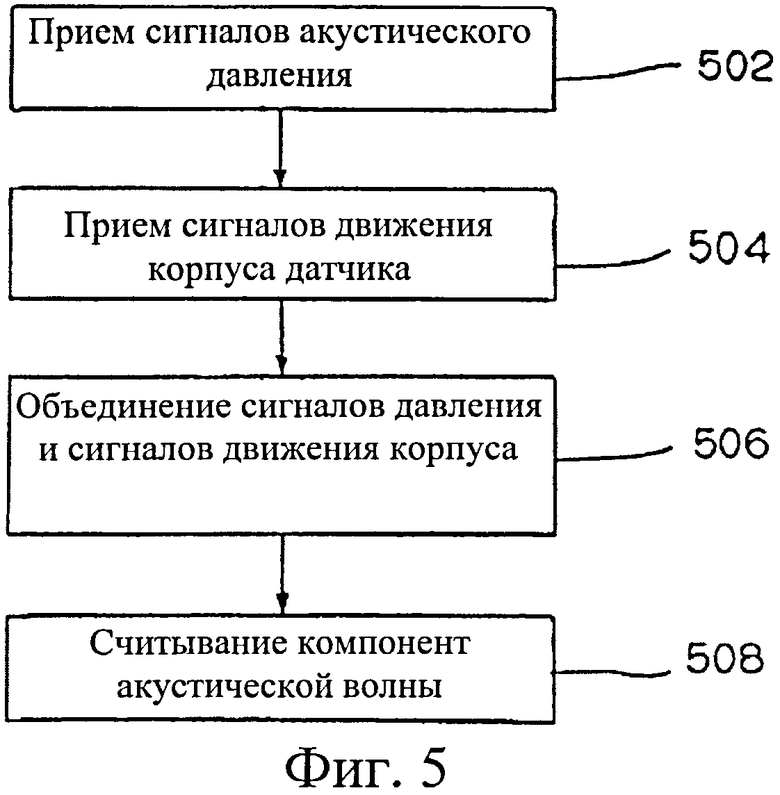
Фиг.5 - блок-схема алгоритма осуществления способа, используемого в датчиках по фиг.1-4, для считывания ряда компонент акустической волны, распространяющейся в текучей среде.
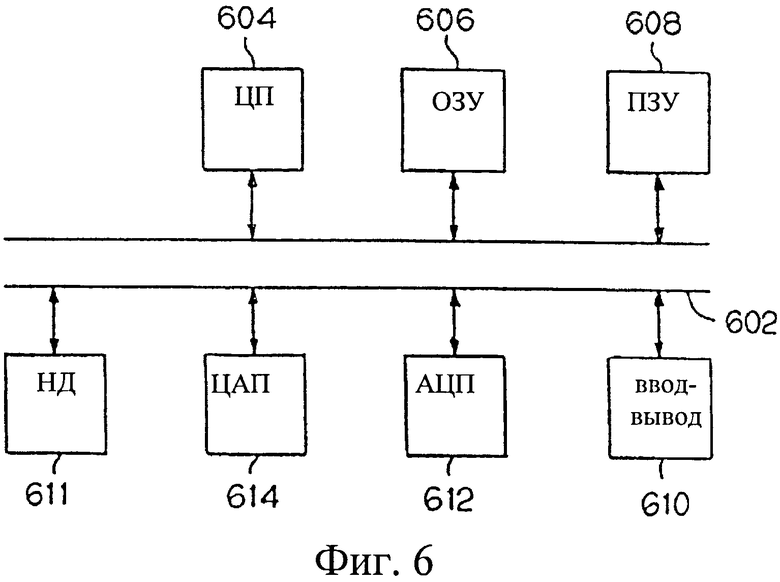
Фиг.6 - блок-схема устройства обработки данных, используемого в датчиках по фиг.1-4.
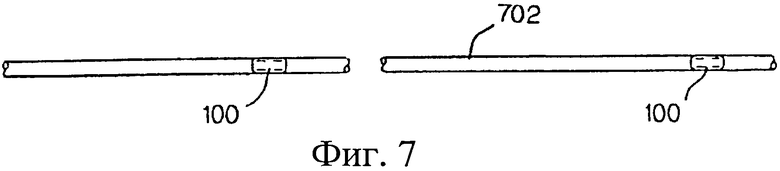
Фиг.7 - вид сбоку части подводного сейсмического кабеля, вмещающего датчики по фиг.1-4, расположенные отдельно друг от друга вдоль его длины.
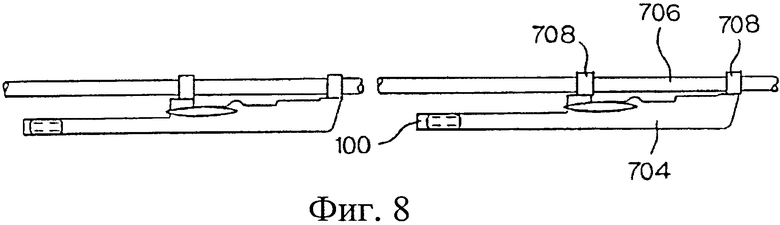
Фиг.8 - вид сбоку, вертикальная проекция, части буксируемой сейсмоприемной косы, имеющей устройства регулировки местоположения, закрепленные с возможностью поворота в отдельных местах вдоль длины сейсмоприемной косы и вмещающие датчики по фиг.1-4.
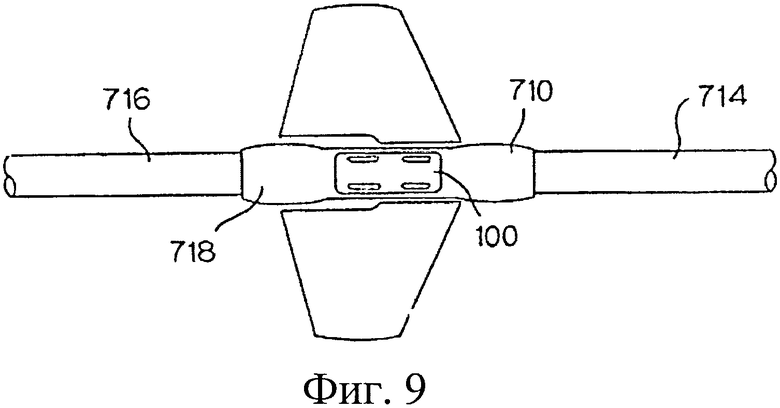
Фиг.9 - вид сбоку или горизонтальная проекция устройства для удержания сейсмического кабеля, установленного между секциями сейсмоприемной косы на одной прямой с ними и вмещающего такой датчик, как показанный на фиг.1-4, в своем центральном корпусе.
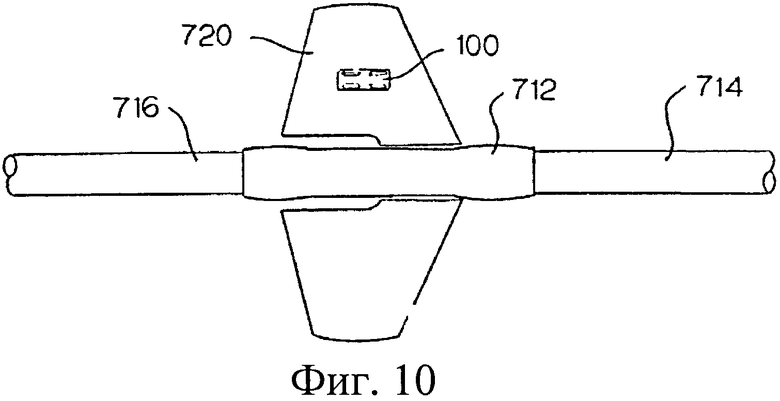
Фиг.10 - вид сбоку или горизонтальная проекция устройства для удержания сейсмического кабеля, установленного между секциями сейсмоприемной косы на одной прямой с ними и вмещающего такой датчик, как показанный на фиг.1-4, в одной из своих управляющих лопастей.
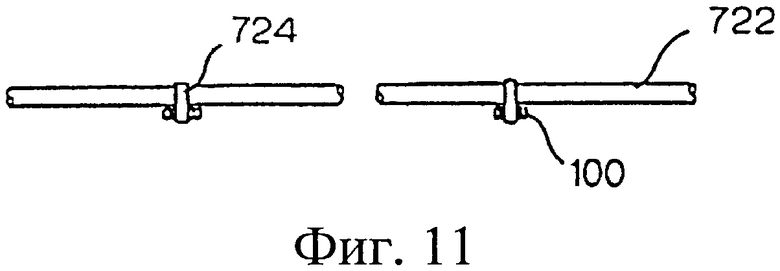
Фиг.11 - вид сбоку таких датчиков, как датчики, показанные на фиг.1-4, закрепленных в отстоящих друг от друга местах вдоль буксирного троса или кабеля.
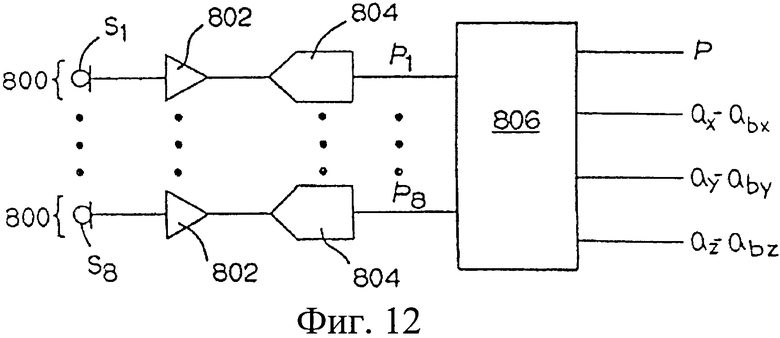
Фиг.12 - блок-схема одного варианта исполнения системы сбора данных и обработки сигналов, предназначенной для датчиков давления в многокомпонентном датчике по фиг.1.
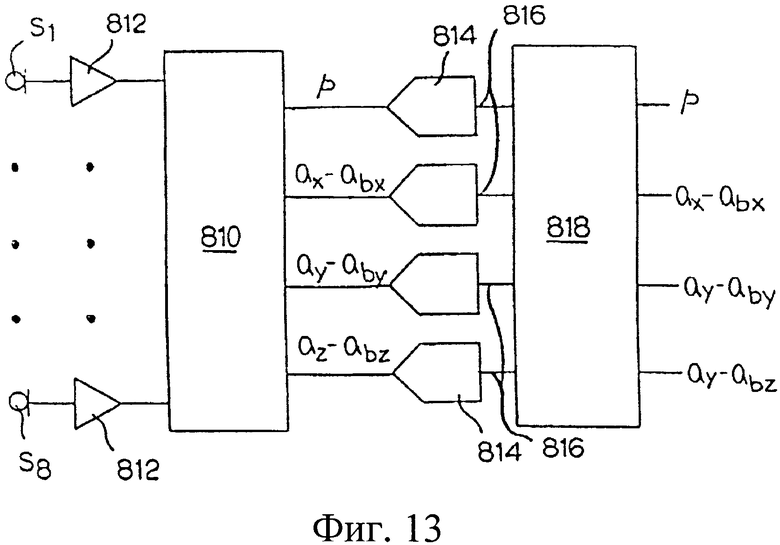
Фиг.13 - блок-схема другого варианта исполнения системы сбора данных и обработки сигналов, предназначенной для датчиков давления в многокомпонентном датчике по фиг.1, с использованием аналого-цифровых преобразователей.
Фиг.14 - вид сбоку автономного устройства регистрации подводных акустических волн, вмещающего такие датчики, как датчики по фиг.1-4.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Показанный на фиг.1 датчик 100 акустических волн, в котором реализованы признаки изобретения, имеет цилиндрическую форму для приспособления его к использованию в текучей акустической среде, проходящей мимо датчика в направлении длинной оси симметрии датчика, оси x. Текучая среда представляет собой газ или жидкость. Для направления линий потока акустической среды, проходящего мимо датчика, и для обеспечения аппроксимации корпуса датчика к модели бесконечно длинного цилиндра в целях достижения дифракции акустических волн, спереди и сзади корпусу датчика могут быть приданы аэродинамические или гидродинамические формы.
В случае применения в водной или жидкой акустической среде поток может представлять собой течение воды, поток жидкости, буксирование датчика через водное пространство или любое другое средство, вызывающее прохождение мимо датчика жидкой акустической среды. В случае применения в жидкой акустической среде датчики 104 давления представляют собой гидрофоны, предпочтительно пьезоэлектрические гидрофоны.
В случае применения в воздушной или газовой акустической среде поток может представлять собой ветер, поток газа, буксирование датчика через воздушную среду или любое другое средство, вызывающее прохождение газовой акустической среды мимо датчика. В случае применения в воздушной акустической среде датчики 104 давления представляют собой микрофоны, предпочтительно конденсаторные микрофоны.
Несмотря на то что принципы работы этого датчика подходят для любой текучей акустической среды, остальная часть данного описания изобретения посвящена описанию датчика, который используется в жидкой акустической среде, в частности, например, в воде.
Датчики 104, 104′ давления, обозначенные, в зависимости от места их расположения, как датчики S1-S8 давления, формируют сигналы p1-p8 давления акустической волны. Каждый датчик давления может быть выполнен в виде одного элемента или группы элементов, установленных в жестком корпусе 102 так, что может происходить дифракция акустической волны вокруг опорного корпуса датчика при отсутствии ее прохождения через него. Жесткий корпус может быть выполнен в виде любой удобной для данного применения формы, но в нижеприведенных примерах он цилиндрический, как видно из фигур чертежей, с продольной осью 103 симметрии и внешней периферией 105. В этой конструкции длина датчиков давления намного превышает их толщину и ширину или их диаметр, и все они установлены в соответствующих углублениях 123, расположенных на равном расстоянии друг от друга по всей окружности жесткого корпуса и открытых к его периферии. На протяжении всего текста описания изобретения термин "жесткий" применительно к опорному корпусу подразумевает, что наружная поверхность опорного корпуса датчиков давления и места расположения датчиков давления в держателе не испытывают существенного смещения, деформации или изменения формы под действием каких бы то ни было напряжений, вызванных акустическими волнами или механическими силами, прикладываемых к держателю датчиков. Взаимное расположение датчиков, установленных в держателе, является неизменным благодаря жесткости корпуса.
Вместе с датчиками давления в жестком корпусе датчиков размещен датчик 120 другого типа - датчик движения, измеряющий движение жесткого корпуса датчиков, который является непроницаемым для акустической волны. Датчиком движения может быть любой датчик, реагирующий на движение, то есть перемещение, скорость или ускорение. Примерами других исполнений датчика движения являются акселерометры, геофоны, сейсмометры, чувствительные к ускорению микрофоны, чувствительные к ускорениям гидрофоны, группы таких аналогичных датчиков или комбинации различных таких датчиков. Датчик 120 движения формирует сигнал a bm датчика, соответствующий движению жесткого корпуса датчиков, с которым этот датчик механически соединен. В предпочтительной конструкции a bm представляет собой вектор ускорения, тремя ортогональными компонентами которого являются a bmx, a bmy и a bmz. Датчик 120 движения может быть установлен в центральной выемке, такой как центральная выемка 124, в опорном корпусе датчиков и изолирован от движения частиц. Таким образом, датчик движения действует как датчик движения жесткого корпуса, а не как датчик движения частиц. Выемка может иметь любую форму, сохраняющую жесткость опорного корпуса датчиков.
Из-за возможности поворота корпуса датчиков в динамическом режиме используется датчик 122 ориентации, связанный с датчиком 120 движения, для ориентирования измеренных датчиком значений по отношению к вектору гравитационного поля, если это необходимо для конкретного случая применения. Многоосный датчик, такой как акселерометр МЭМС, имеющий отклик вплоть до постоянного тока, совмещает в одном устройстве считывание движения корпуса датчиков и считывание ориентации. Для ориентирования измеряемых датчиком значений относительно гравитационного поля могут использоваться известные вычислительные средства преобразования координат. Датчик 120 движения может представлять собой двухосный модуль, если одна ось ориентации известна и движение корпуса датчиков вдоль этой оси не требуется. В буксируемом датчике, для которого продольная ось симметрии, параллельная буксирному тросу, определяется другими средствами, такими как навигационная система, может использоваться двухосный датчик 122 ориентации. Другой альтернативой является отдельный датчик ориентации, используемый в комбинации с датчиком движения. Датчик 122 ориентации может быть установлен в выемке 124 в корпусе датчиков любой формы, обеспечивающей сохранение жесткости опорного корпуса датчиков. В любом случае сигнал датчика, снимаемый с датчика 120, используемый на протяжении всего описания изобретения, имеет отношение к измеренному значению, касающемуся корпуса датчиков, а не к измеренному значению, касающемуся гравитации.
В имеющихся в корпусе датчиков выемке или выемках 124 любой формы, при которой сохраняется жесткость корпуса датчиков, могут быть размещены электронные схемы предварительного формирования сигналов, предназначенные для датчиков давления и датчиков движения. Каналы 126, проходящие сквозь корпус датчиков, облегчают применение датчика. Каналы могут быть любой формы, при которой сохраняется жесткость корпуса датчиков. В каналах 126 могут размещаться буксирные тросы, провода электропроводки или другие устройства, используемые для размещения датчика.
Отклик датчика на давление акустической волны имеет вид

Это общеизвестное уравнение для составного датчика давления, и оно представляет собой среднее арифметическое выходных сигналов отдельных датчиков давления. Этот составной датчик давления акустических волн, составленный из восьми отдельных датчиков давления, ведет себя как точечный датчик для акустического давления вплоть до λmin, где самый большой размер датчика меньше, чем λmin/20, и λmin представляет собой самую короткую считываемую длину волны звука. Отклик p представляет собой давление акустической волны плюс шумовая составляющая из-за вихрей турбулентного потока на поверхности датчика.
Датчик давления с большей длиной L, чем характеристическая длина вихрей турбулентного потока, ослабляет шум псевдодавления потока по отношению к отклику точечного датчика на шум потока. Как известно из литературного источника "Narrow-Band Investigations of the Longitudinal Space-Time Correlation Function in Turbulent Airflow," JASA, 1964, Henry P. Bakewell, Jr. (Bakewell), включенного посредством ссылки, характеристическая длина определяется выражением вида 

Случайный процесс, вызывающий псевдодавление, обусловленное шумом потока, является статистически независимым на интервале разделения на характеристические длины или также больше в окружном направлении. Шум потока ослабляется на 10logN=10log4=6 дБ для частот свыше 
Датчик давления акустических волн, распространяющихся в текучих средах, имеющий такую конфигурацию, как показано на фиг.1, обладает низкой чувствительностью к шуму потока и в то же время ведет себя как точечный датчик для акустического давления вплоть до λmin, где наибольший размер датчика меньше, чем λmin/20, и λmin - самая меньшая регистрируемая длина волны звука. В предпочтительном варианте самый большой в длину размер датчика составляет 100 мм, что имеет результатом верхнюю рабочую частоту, составляющую 750 Гц, как у точечного датчика для акустического давления в воде.
Как известно из литературного источника "Measurement of Acoustic Intensity Using the Cross-Spectral Density of Two Microphone Signals," JASA, 1977, Frank J. Fahy, который включен посредством ссылки, движение частиц акустической волны может восприниматься датчиком градиента давления, который описывается уравнением для момента текучей среды с нулевым средним потоком, которое устанавливает связь между градиентом давления и ускорением частиц:

где ux - компонента скорости частиц акустической волны в направлении x и a x - компонента ускорения частиц акустической волны в направлении x. Это уравнение справедливо для акустических волн в свободном пространстве, где отсутствует дифракция вокруг твердого тела. Это состояние встречается тогда, когда акустическая волна распространяется в направлении x, огибая бесконечно длинный цилиндр. Как указано выше, это состояние встречается на практике тогда, когда спереди и сзади корпусу датчика приданы аэродинамические или гидродинамические формы для обеспечения обтекания датчика проходящим мимо него потоком акустической среды и для аппроксимации корпуса датчиков к модели бесконечно длинного цилиндра для дифракции акустических волн.
Датчик градиента давления может быть реализован вычислением разности откликов двух отдельных датчиков давления, расположенных на расстоянии l друг от друга в направлении x при условии, что больший размер датчика меньше, чем λmin/20, и λmin - наименьшая регистрируемая длина волны звука, где l - расстояние между акустическими центрами датчиков, имеющее конечное значение.
Для того чтобы датчик градиента давления хорошо работал как датчик движения частиц акустической волны, отклик каждого из двух составляющих датчиков давления должен быть хорошо согласован. Каждый из двух составляющих датчиков давления реагирует на давление акустической волны. Когда вычисляется разность откликов двух датчиков давления, дифференциальный отклик на давление акустической волны должен быть ослаблен настолько, чтобы он был значительно слабее, чем дифференциальный отклик на движение частиц акустической волны. Это выполняется согласованием частотного отклика каждого из двух составляющих датчиков давления по амплитуде и фазе в заданном рабочем диапазоне частот датчика. В предпочтительном варианте частотные отклики двух составляющих датчиков давления согласованы с точностью до ±0,1% или выше как по амплитуде, так и по фазе. Согласование по фазе с точностью до ±0,1% означает согласование с точностью до ±0,001 радиан, что составляет ±0,0573°.
Согласование по фазе выполняется: (а) изготовлением датчиков давления из одной и той же партии пьезоэлектрического материала; (b) контролем размеров датчиков давления и их держателей с пределом допуска ±0,1% или выше; и (с) предварительным формированием выходных сигналов датчиков давления электрометрическими усилителями или их эквивалентом. Согласование по амплитуде выполняется путем применения устройства для подстройки масштабного коэффициента канала приема данных каждого датчика давления. Как показано на фиг.12 для датчика градиента давления с восемью датчиками, по фиг.1, каждый из восьми каналов 800 приема данных содержит датчик S1-S8 давления и связанные с ним обслуживающие электронные схемы, включая усилитель 802 предварительного формирования сигнала, такой как электрометрический усилитель или измерительный усилитель, и соответствующее ему устройство приема данных, такое как аналого-цифровой преобразователь (АЦП) 804, формирующий один из выходных сигналов p1-p8. Для каждого канала приема данных могут быть применены стандартные статические (во время изготовления) методы подстройки масштабного коэффициента или коэффициента усиления. К тому же, стандартные методы и устройства могут использоваться для поддержания согласования по амплитуде и фазе частотных откликов канала приема данных с учетом влияния старения и окружающей среды (например, влияния температуры, ударных нагрузок и вибрации).
Для учета влияния старения и окружающей среды и для снижения требований к точности согласования при изготовлении датчиков целесообразно измерять согласование по амплитуде и фазе частотных откликов каналов приема данных в месте эксплуатации. В предпочтительном варианте вслед за выполнением операции приема данных предусмотрено выполнение операции обработки сигналов в процессоре 806 цифровых сигналов (ПЦС). ПЦС для каждого датчика градиента давления может или локальным или расположенным на некотором удалении. Для каждого канала приема данных акустического давления процессор сигналов выполняет взаимную корреляцию частотной области между сложным сигналом p давления, вычисленным ПЦС 806 в соответствии с уравнением 1, и одним из сигналов p1-p8 отдельных датчиков давления. Длина кадра взаимной корреляции выбирается достаточно большой для того, чтобы ограничить статистическую ошибку взаимной корреляции до значения, меньшего ±0,01%. Алгоритмы взаимной корреляции между обрабатываемыми сигналами в частотной области широко известны в данной области техники.
Амплитуда и фаза вычисленных спектров коэффициентов взаимной корреляции представляют собой соответственно мультипликативную поправку по амплитуде и аддитивную поправку по фазе для каждого канала приема данных акустического давления. Внесение соответствующей поправки по амплитуде и фазе в каждый канал приема данных акустического давления обеспечивает согласование каналов p1-p8 между собой и с откликом p на давление с более высокой точностью, чем ±0,1%.
Отклик датчика на составляющую по оси x ускорения частиц акустической волны вычисляется в ПЦС 806 и определяется выражением вида

Это общеизвестное уравнение для составного датчика градиента давления, в котором ρ - плотность акустической среды и l - интервал между акустическими центрами датчиков давления, и оно отображает реализацию датчика градиента давления из выходных сигналов p1-p8 отдельных датчиков давления. Отклик по градиенту давления представляет собой составляющую по оси x ускорения a x частиц акустической волны за вычетом составляющей но оси x ускорения a bx жесткого опорного корпуса датчиков. Это объясняется тем, что базой, определяющей в уравнении 2 ускорение и градиент давления, является средняя точка акустических центров датчиков давления.
Для получения составляющей по оси x ускорения частиц акустической волны составляющую по оси x датчика 120 движения жесткого корпуса суммируют с составляющей по оси x датчика градиента давления:

Отклик датчика на составляющую по оси x ускорения частиц акустической волны является точным при условии, что a bmx=a bxm; то есть существует относительная погрешность датчика градиента давления и датчика 120 движения жесткого корпуса. Относительная погрешность датчика градиента давления и датчика движения жесткого корпуса в предпочтительном варианте составляет ±0,1% или выше. Дополнительное вычисление, описываемое уравнением 3, с объединением составляющих по оси x выходных сигналов датчика градиента давления и датчика движения жесткого корпуса, может быть выполнено в ЦПС 806.
Отклик датчика градиента давления по оси x на шум потока при конструктивном исполнении в соответствии с фиг.1 ослаблен по сравнению с откликом на шум потока точечного датчика. Как пояснено выше, шум потока ослабляется на 
Ниже частоты fcl существует ослабление из-за различия датчиков, разделенных расстоянием l. Как известно из литературного источника автора Бэйквелл, случайный процесс возникновения псевдодавления при шуме потока имеет коэффициент корреляции 
Как пояснено выше, шум потока ослаблен на 10logN=10log4=6 дБ для частот свыше 
Работа датчиков движения частиц акустической волны для составляющих, направленных по оси y и оси z, основана на родственной, но отличающейся физической закономерности. Как известно из литературного источника "Vibration and Sound," Acoustical Society of America, 1976, Philip M. Morse (Morse), включенного посредством ссылки, акустическая волна, дифрагирующая вокруг жесткого цилиндра, создает на ближайшей стороне давление, отличающееся от давления на дальней стороне, которое описывается уравнением, связывающим разность давлений с ускорением частиц:
pfore-paft=2dρay,
где a y - составляющая ускорения частиц акустической волны в направлении y. Это состояние встречается тогда, когда акустическая волна распространяется в направлении y поперечно к бесконечно длинному цилиндру. Как указано выше, это состояние встречается на практике тогда, когда спереди и сзади корпусу датчиков приданы аэродинамические или гидродинамические формы для обеспечения обтекания датчика проходящим мимо него потоком акустической среды и для аппроксимации корпуса датчиков к модели бесконечно длинного цилиндра для дифракции акустических волн.
Датчик градиента давления дифрагированной волны может быть реализован путем определения разности откликов двух датчиков 104 давления, установленных на жестком цилиндре и отстоящем в направлении y на величину диаметра d при условии, что наибольший размер датчика меньше, чем λmin/20, и λmin является самой меньшей регистрируемой длиной волны звука. На практике датчики 104 давления постоянно находятся в углублениях 123 в жестком корпусе, но они реагируют на давление в местах выхода этих углублений на наружный диаметр цилиндра.
Отклик датчика градиента давления дифрагированной волны на составляющую ускорения частиц акустической волны по оси y вычисляется в ПЦС 806 и имеет вид

Это уравнение для составного датчика градиента давления дифрагированной волны, причем в этом уравнении ρ - плотность акустической среды и d - диаметр жесткого цилиндра, на котором установлены датчики давления. Отклик представляет собой результат вычитания из составляющей a y по оси y ускорения частиц акустической волны составляющей a by по оси y ускорения жесткого корпуса датчиков. Это объясняется тем, что базой, определяющей разность ускорений и давлений в уравнении 4, является средняя точка акустических центров датчиков давления.
Для получения составляющей по оси y ускорения частиц акустической волны составляющую по оси y датчика 120 движения жесткого корпуса суммируют с составляющей по оси у датчика градиента давления дифрагированной волны:

Отклик датчика на составляющую по оси у ускорения частиц акустической волны является точным при условии, что a bmy=a by; то есть существует относительная погрешность датчика градиента давления дифрагированной волны и датчика 120 движения жесткого корпуса. Относительная погрешность датчика градиента давления дифрагированной волны и датчика движения жесткого корпуса в предпочтительном варианте составляет ±0,1% или выше. Предусмотренное в уравнении 5 сложение для объединения выходных сигналов составляющих по оси у датчика градиента давления дифрагированной волны и датчика движения жесткого корпуса может быть выполнено в ПЦС 806.
При конструктивном исполнении в соответствии с фиг.1 отклик датчика градиента давления дифрагированной волны для составляющей по оси y на шум потока ослаблен по сравнению с откликом на шум потока точечного датчика. Как пояснено выше, шум потока ослаблен на 
Ниже частоты fcl имеет место ослабление из-за различия датчиков давления, отстоящих друг от друга на расстоянии d. Как показано Бэйквеллом, случайный процесс возникновения псевдодавления при шумах потока имеет коэффициент корреляции 
Аналогичным образом, отклик датчика градиента давления дифрагированной волны на составляющую по оси z ускорения частиц акустической волны вычисляется при помощи ПЦС и имеет вид

Для получения составляющей по оси z ускорения частиц акустической волны, ПЦС 806 объединяет ускорение частиц акустической волны с движением жесткого корпуса вдоль оси z путем суммирования составляющей по оси z датчика 120 движения жесткого корпуса с составляющей по оси z датчика градиента давления дифрагированной волны:

Отклик датчика на составляющую по оси z ускорения частиц акустической волны является точным при условии, что a bmz=a bz; то есть имеется относительная погрешность датчика градиента давления дифрагированной волны и датчика 120 движения жесткого корпуса. Относительная погрешность датчика градиента давления дифрагированной волны и датчика движения жесткого корпуса в предпочтительном варианте составляет ±0,1% или выше.
При таком конструктивном исполнении, как показано на фиг.1, отклик датчика градиента давления дифрагированной волны для оси z на шум потока ослаблен в той же степени, что и с датчиком градиента давления дифрагированной волны для оси y.
Точно регистрируются четыре компоненты акустической волны, распространяющейся в текучей среде - давление p и три ортогональные компоненты а х, a y и a z движения частиц, и датчик по существу нечувствителен к движению жесткого корпуса и по существу нечувствителен к создающему псевдодавление турбулентному потоку акустической среды, проходящему мимо датчика.
На фиг.13 показан другой вариант реализации обслуживающих электронных схем, составляющих каналы приема данных, и обработка цифровых сигналов, с использованием лишь четырех аналого-цифровых преобразователей вместо восьми, использованных в варианте, поясняемым фиг.12. Каждый из датчиков S1-S8 давления через предусилитель 812 подключен к процессору 810 аналоговых сигналов (ПАС). ПАС выполняет некоторые из функций объединения сигналов, выполняемых ПЦС 806 по фиг.12, чтобы уменьшить количество требующихся аналого-цифровых преобразователей. Например, в ПАС 810 используются аналоговые схемы, формирующие выходные сигналы p, (а х-a bx), (a y-a by) и (a z-a bz). Эти четыре аналоговых выходных сигнала преобразуются в цифровую форму в четырех аналого-цифровых преобразователях 814, и эти оцифрованные выходные сигналы 816 подаются в ПЦС 818, который может выполнять другие функции, выполняемые ПЦС 806 по фиг.12, как, например, выполнение взаимных корреляций для сохранения в динамическом режиме согласования частотных откликов и объединение сигналов градиента давления с сигналами движения жесткого корпуса. ПЦС может быть локальным для каждого датчика градиента давления или расположенным на некотором удалении. Таким образом, для системы ПАС по фиг.13 требуется меньшее количество аналого-цифровых преобразователей, чем для датчиков давления. Согласование частотных откликов по амплитуде и фазе может быть задано и поддерживается при помощи ПАС и ПЦС. Кроме того, при помощи ПАС и ПЦС могут выполняться вычисления других уравнений, описываемых далее применительно к датчикам.
Количество датчиков давления, минимально необходимое для считывания четырех компонент акустической волны, распространяющейся в водной среде, равно четырем. Во второй конструкции, относящейся к фиг.1, используются только четыре датчика S1, S3, S6 и S8. Отклик составного датчика давления на давление акустической волны в таком случае имеет вид
Для получения составляющей по оси x ускорения частиц акустической волны составляющую по оси x датчика 120 движения жесткого корпуса суммируют с составляющей по оси x датчика градиента давления:

Для получения составляющей по оси y ускорения частиц акустической волны составляющую по оси y датчика 120 движения жесткого корпуса суммируют с составляющей по оси y датчика градиента давления:

Для получения составляющей по оси z ускорения частиц акустической волны составляющую по оси z датчика 120 движения жесткого корпуса суммируют с составляющей по оси y датчика градиента давления:

При этом минимальном количестве датчиков ослабление шума потока на каждом из четырех считываемых компонент акустической волны приблизительно на 3 дБ меньше, чем в показанной на фиг.1 конструкции с восемью датчиками. Это объясняется тем, что в составных датчиках p и а х в два раза меньше элементов, и потому что в составных датчиках a y и a z длина L элементов в два раза меньше.
В третьей конструкции, относящейся к фиг.1, используются только датчики S2, S4, S5 и S7 давления. Отклик составного датчика давления на давление акустической волны имеет вид
Для получения составляющей по оси x ускорения частиц акустической волны составляющая по оси x датчика 120 движения корпуса суммируется с составляющей по оси x датчика градиента давления:

Для получения составляющей по оси y ускорения частиц акустической волны составляющая по оси y датчика 120 движения жесткого корпуса суммируется с составляющей по оси y датчика градиента давления:

Для получения составляющей по оси z ускорения частиц акустической волны составляющая по оси z датчика 120 движения жесткого корпуса суммируется с составляющей по оси z датчика градиента давления:

При этом минимальном количестве датчиков ослабление шума потока на каждом из четырех считываемых компонент акустической волны приблизительно на 3 дБ меньше, чем в показанной на фиг.1 конструкции с восемью датчиками. Это объясняется тем, что в составных датчиках p и а х в два раза меньше элементов, и потому что в составных датчиках а у и a z длина L элементов в два раза меньше.
Когда датчик градиента давления установлен так, как показано на фиг.1, в жестком опорном корпусе 102, вокруг окружной поверхности которого происходит дифракция акустических волн, датчик градиента давления работает как датчик градиента давления дифрагированных волн вдоль осей y и z, перпендикулярных к направлению в одну линию или к оси x. Получаемые в результате датчики градиента давления дифрагированных волн по осям y и z более чувствительны к движению частиц, чем датчик градиента давления, конструктивное исполнение которого не позволяет детектировать акустическую волну, дифрагированную вокруг опорного корпуса. Вдоль направления в одну линию, направления оси x, датчик работает как датчик градиента давления, вокруг жесткого опорного корпуса вдоль оси x дифракция акустических волн отсутствует. Вообще, очень длинный цилиндр не реагирует на движение частиц акустической волны, распространяющейся в направлении оси симметрии цилиндра.
Существуют вариации датчика, считывающие менее чем четыре компоненты акустической волны, распространяющейся в текучей среде, которые изображены на фиг.2-4. Четыре датчика давления и два датчика 220, 320 или 420 движения жесткого корпуса могут использоваться для считывания трех компонент акустической волны - давления и двух ортогональных компонент движения частиц. В альтернативном варианте лишь три датчика давления и два датчика 220, 320 или 420 движения жесткого корпуса составляют минимально необходимое количество датчиков для считывания трех компонент акустической волны - давления и двух ортогональных компонент движения частиц. Аналогичным образом, два датчика давления и один датчик 220, 320 или 420 движения жесткого корпуса составляют минимально необходимое количество датчиков для считывания двух компонент акустической волны - давления и одной компоненты движения частиц. Направление считываемой компоненты движения частиц привязано к держателю. Если может иметь место поворот корпуса датчиков в динамическом режиме, то тогда требуется способ использования датчика 222, 322 или 422 ориентации, как описано в отношении датчика по фиг.1, и минимально требующееся количество датчиков давления составляет три или четыре датчика. Составной датчик давления всегда математически представляется как среднее арифметическое выходных сигналов отдельных составляющих датчиков давления. Отклик датчика на шум потока по каждой считываемой компоненте увеличивается по мере уменьшения количества или длины датчиков, используемых для каждой считываемой компоненты.
С другой стороны, для дальнейшего снижения чувствительности датчика к шуму потока ниже величины чувствительности, достигаемой при использовании конструкции с восемью датчиками давления по фиг.1, может использоваться более, чем восемь датчиков давления, как например двенадцать или шестнадцать или более, для считывания четырех компонент акустической волны, распространяющейся в текучей среде.
Трехкомпонентный датчик может быть выполнен так, как показано на фиг.1, с использованием только датчиков и уравнений, которые дают величину p и любые две из величин a x, а y и a z. Двухкомпонентный датчик давления может быть выполнен так, как показано на фиг.1, с использованием только датчиков и уравнений, которые дают величину p и любую одну из величин a x, a y и a z.
Трехкомпонентный датчик 200 может быть выполнен так, как показано на фиг.2, где датчики S1, S3, S6 и S8 формируют отклики p1, p3, p6 и p8 на давление соответственно, и применяются уравнения для p, a y и a z. В примере выполнения датчика акустических волн с таким конструктивным исполнением, как показано на фиг.2, этот датчик имеет длину L датчика, равную 50 мм, и диаметр d, равный 50 мм; интервал lc между датчиками давления, расставленными на окружности на угловом расстоянии 90° относительно друг друга, составляет 39,3 мм. При использовании датчика по фиг.2 ослабление шума потока по каждой из трех считываемых компонент акустической волны на 3 дБ меньше, чем при использовании конструкции с восемью датчиками по фиг.1. Это объясняется тем, что в составном датчике величины p используется в два раза меньше элементов, и тем, что в датчиках величин a y и a z в два раза меньше длина L элементов. Двухкомпонентный датчик может быть выполнен так, как показано на фиг.2, с использованием только датчиков и уравнений, дающих величину p и любую одну из величин a y и a z.
Трехкомпонентный датчик 300 может быть выполнен так, как показано на фиг.3, где более длинные датчики S1, S3, S6 и S8 давления формируют отклики p1, p3, p6 и p8 на давление соответственно, и применяются уравнения для величин p, a у и a z. В примере выполнения датчика акустических волн с таким конструктивным исполнением, как показано на фиг.3, этот датчик имеет длину L датчика, равную 100 мм, и диаметр d, равный 50 мм; интервал lc между датчиками давления, расставленными на окружности на угловом расстоянии 90° относительно друг друга, составляет 39,3 мм. При использовании датчика по фиг.3 ослабление шума потока по каждой из трех считываемых компонент акустической волны приблизительно такое же, как при использовании конструкции с восемью датчиками по фиг.1. Это объясняется тем, что длина L элементов в два раза больше несмотря на то, что количество элементов в составном датчике величины p в два раза меньше, и тем, что длина L элементов в датчиках величин a y и a z такая же, как и суммарная длина расположенных в одну линию в продольном направлении датчиков по фиг.1. Двухкомпонентный датчик может быть выполнен так, как показано на фиг.3, с использованием только датчиков и уравнений, дающих величину p и любую одну из величин a y и a z.
Трехкомпонентный датчик 400 может быть также выполнен так, как показано на фиг.4, где датчики S1, S2 и S3 давления, расположенные с равными интервалами в 120° по окружности, формируют отклики p1, p2 и p3 на давление соответственно. Отклик составного датчика на давление акустической волны в таком случае имеет вид
Как показано автором Морс, дифракция акустической волны вокруг жесткого цилиндра вызывает действие на поверхность цилиндра давления, изменяющегося от максимума на ближней стороне до минимума на дальней стороне, в результате чего применимы приведенные ниже уравнения для градиента давления при дифракции.
Для получения составляющей по оси y ускорения частиц акустической волны составляющая по оси y датчика 420 движения жесткого корпуса суммируется с составляющей по оси у датчика градиента давления дифрагированной волны:

Для получения составляющей по оси z ускорения частиц акустической волны составляющая по оси z датчика 420 движения жесткого корпуса суммируется с составляющей по оси z дифракционного датчика градиента давления дифрагированной волны:

В примере выполнения датчик акустических волн, распространяющихся в водной среде, конструктивное исполнение которого показано на фиг.4, имеет длину L волны, равную 50 мм и диаметр d, равный 50 мм; интервал lc между датчиками давления, расположенными по окружности с угловым расстоянием 120° относительно друг друга, составляет 53,4 мм. При использовании датчика по фиг.4 ослабление шума потока по каждой из трех считываемых компонент акустической волны приблизительно на 4,3 дБ меньше, чем при использовании конструкции с восемью датчиками, по фиг.1. Это объясняется тем, что в составном датчике величины p количество элементов составляет 3/8 от количества элементов в этом датчике в конструкции но фиг.1, и тем, что длина L элементов в два раза меньше и для датчиков величин a y и a z интервал между датчиками по окружности уменьшен.
Датчик градиента давления и датчики движения жесткого корпуса, которые составляют датчик движения частиц, могут быть трехосными датчиками, реагирующими на движение вдоль трех ортогональных осей, двухосными датчиками, реагирующими на движение вдоль двух ортогональных осей, или одноосными датчиками, реагирующими на движение вдоль одной оси, в зависимости от требований конкретной области применения.
На фиг.5 приведена блок-схема, поясняющая способ считывания 500. Способ считывания 500 включает прием сигналов давления акустических волн в блоке 502, прием сигналов движения корпуса датчиков в блоке 504, объединение сигналов давления и сигналов движения корпуса в блоке 506 и формирование считанных компонент акустической волны в блоке 508.
Для осуществления способа считывания 500 в блоке 502 принимают от датчиков S1-S8 давления от двух до восьми или более сигналов p1-p8 давления акустической волны. Прием сигналов давления в блоке 502 может быть реализован при помощи каналов приема данных, каждый из которых состоит датчика давления, его согласующего усилителя, и его соответствующего устройства приема данных, формирующего один из выходных сигналов p1-p8, так, как показано в схеме по фиг.12 или фиг.13. В блоке 504 от датчика движения, соответствующего позициям 120 или 220 или 320 или 420, принимают от одного до трех сигналов a bmx, a bmy и a bmz движения корпуса датчика. Прием сигнала движения в блоке 504 может быть реализован при помощи каналов приема данных, каждый из которых состоит из датчика движения, его согласующего усилителя и его соответствующего устройства приема данных, формирующего один из выходных сигналов a bmx, a bmy и a bmz. В блоке 506 может выполняться дополнительная, являющаяся необязательной, операция измерения согласования амплитуды и фазы частотных откликов между каналами приема данных. Дополнительное, при желании, внесение соответствующей поправки по амплитуде и фазе в каждый канал приема данных давления акустической волны обеспечивает согласование каналов p1-p8 между собой и с откликом p составного датчика давления с более высокой точностью, чем ±0,1%. Объединение сигналов движения корпуса и сигналов давления в блоке 506 реализуют путем выполнения математических операций, описываемых уравнениями, приведенными выше. В блоке 508 формируют до четырех компонент акустической волны, распространяющейся в текучей среде, давление p и одну из трех ортогональных компонент a x, a y, и a z движения частиц. Результат, получаемый в блоке 508, нечувствителен к движению жесткого корпуса датчиков и по существу нечувствителен к создающему псевдодавление турбулентному потоку акустической среды, проходящей мимо датчика.
Хотя способ 500 описан с привязкой к датчику 100, 200, 300 или 400, он может быть осуществлен с использованием эквивалентных аппаратных средств, известных в области техники, к которой относится изобретение. Более того, способ 500 может быть осуществлен с использованием аппаратных средств, программных средств или комбинации аппаратных средств и программных средств. Например, способ считывания 500 может быть осуществлен, в целом или частично, при помощи процессора устройства обработки данных, осуществляющего обработку в соответствии с набором машинно-читаемых команд, таких как описываемые со ссылкой на фиг.6.
В примерах осуществления изобретения, реализуемых с использованием устройства обработки данных, выполняющего машинно-читаемые команды, машинно-читаемые команды хранятся на машинно-читаемом носителе данных и, когда они исполняются процессором, конфигурируют и ориентируют процессор или устройство обработки и дают ему указание осуществлять возможности датчика 100, 200, 300 или 400, и способ 500. Примерами машинно-читаемого носителя могут служить оперативные запоминающие устройства (ОЗУ), постоянные запоминающие устройства (ПЗУ), оптические диски (компакт-диски форматов CD или DVD) и магнитные носители данных.
На фиг.6 представлен пример выполнения устройства 600 обработки данных. Устройство 600 обработки данных включает в себя системную шину 602, процессор 604, ОЗУ 606, ПЗУ 608, и интерфейс 610 ввода/вывода данных, и машинно-читаемый носитель 611 данных (НД). В некоторых примерах осуществления устройство обработки данных содержит аналого-цифровой преобразователь (АЦП) 612 и цифро-аналоговый преобразователь (ЦАП) 614.
В процессе эксплуатации машинно-читаемые программные команды загружают из, по меньшей мере, одного из следующих элементов: из ОЗУ 606, ПЗУ 608 и других носителей данных (не показаны) в процессор 604 для их исполнения. Когда они исполняются процессором 604, машинно-читаемые программные команды конфигурируют процессор 604 и дают ему указание осуществить возможности датчика 100, 200, 300 или 400 и способа 500 считывания. Этим обеспечивается образование одного средства для объединения выходного сигнала первого датчика с выходным сигналом второго датчика, одного средства для согласования амплитуды и фазы частотного отклика датчиков давления акустических волн, одного средства для вычисления взаимных корреляций между частотными откликами каждого из датчиков давления акустических волн и одного средства для вычитания согласованных частотных откликов датчиков давления. Кроме того, для облегчения осуществления способа 500 считывания при помощи устройства обработки данных считываемые сигналы могут быть преобразованы с помощью АЦП 612, так что процессор 604 может работать по цифровой копии считанных сигналов. Цифровые копии сигналов давления акустических волн, сигналов градиента давления, сигналов движения жесткого корпуса, сигналов движения датчика и вычисленные компоненты акустической волны могут, например, запоминаться как данные датчика на машинно-читаемом накопителе данных при помощи устройства 611 хранения данных для автономной обработки данных или дистанционной обработки данных другим процессором. Кроме того, помимо предусмотренной в способе 500 считывания обработки данных, осуществляемой при помощи устройства обработки данных, считанные сигналы могут быть преобразованы при помощи ЦАП 614 в аналоговые считанные сигналы для дальнейшего использования.
Процессор 604 может содержать центральный процессор общего назначения (ЦП), процессор цифровых сигналов (ПЦС), программируемую пользователем вентильную матрицу (FPGA) или специализированную интегральную схему (ASIC).
Датчик 100 движения частиц показан размещенным различными способами на фиг.7-11 и фиг.14. На фиг.7 датчик 100 и его жесткий опорный корпус показаны помещенными в подводный сейсмический кабель 702, такой как морской донный сейсморазведочный кабель или буксируемая сейсмоприемная коса. На фиг.8 датчик 100 показан помещенным в корпус устройства позиционирования кабеля, такого как регулятор 704 глубины погружения морской сейсмоприемной косы, предназначенный для регулировки глубины погружения и управления кабелем, прикрепленного к буксируемой сейсмоприемной косе 706 при помощи колец 708 с возможностью поворота. Фиг.9 и 10 также показывают датчик, размещенный в устройствах 710, 712 управления кабелем. Оба эти устройства представляют собой устройства, расположенные в одну линию, введенные между секциями 714, 716 сейсмоприемной косы спереди и сзади. На фиг.9 датчик 100 размещен в основном корпусе 718 регулятора глубины погружения морской сейсмоприемной косы. На фигуре 10 датчик размещен в одной из управляющих лопаток регулятора глубины погружения сейсмоприемной косы или крыльях 720. Жесткий опорный корпус датчика может быть составной частью конструкции регулятора глубины погружения или же может представлять собой самостоятельный элемент, размещенный в имеющейся в регуляторе глубины погружения выемке. На фиг.11 датчики 100 показаны прикрепленными к буксировочному тросу 722 или кабелю при помощи таких средств крепления, как хомуты 724 или кольца, в местах, расположенных на расстоянии друг от друга вдоль длины троса. Этот вариант обеспечивает замену полностью оборудованной приборами сейсморазведочной косы намного менее дорогостоящим тросом, таким как трос диаметром 3,5 дюйма. Во всех этих вариантах датчик и его жесткий опорный корпус механически соединены непосредственно или опосредованно с подводным сейсмическим кабелем. На фиг.14 показан датчик 730, размещенный в автономном регистрирующем устройстве, в этом примере он показан размещенным в подводном аппарате (ПА) 732. Датчик измеряет характеристику давления и движения частиц акустической плоской волны и отделяет ее от динамического движения автономного регистрирующего устройства. Автономное регистрирующее устройство может иметь автономное оборудование для регистрации, такое как аккумуляторные батареи, стабильные часы и запоминающее устройство, которое обеспечивается в узле Fairfield Z700, изготавливаемом фирмой Фэрфилд ноудэл (Fairfield Nodal) из г. Хьюстон, штат Техас, США. В качестве ПА может быть использован, например, ПА модели Hugin 1000, изготавливаемый фирмой Конгсберг мэритайм (Kongsberg Maritime) из г.Конгсберг, Норвегия, или автономный подводный глайдер APEX, изготавливаемый фирмой Теледин Уэбб Рисерч (Teledyne Webb Research) из г. Ист Фэлмаус, штат Массачусетс, США. Система обеспечивает автономное измерение упругой продольной волны с режекцией сигнала под действием волны-спутника и исключением движения устройства во время свободного плавания в воде. Жесткий корпус 734 датчика может быть составной частью фюзеляжа ПА или отдельной корпусной деталью, устанавливаемой в ПА. ПА, как и регуляторы глубины погружения сейсмоприемной косы по фиг.7-10 и датчики по фиг.11, могут также содержать систему 736 обработки данных и машинно-читаемый носитель 738 данных для записи измеренных и рассчитанных сигналов датчиков.
Изобретение, подробно описанное выше на одном примере его осуществления с модификациями, допускает существование и других примеров осуществления изобретения. Например, предварительное формирование и масштабирование отдельных измеренных значений давления и движения акустических волн и все другие описанные вычисления могут быть выполнены в реальном времени или автономно при последующей обработке данных. Это может предусматривать масштабирование измеренного значения движения частиц акустической волны при акустическом полном сопротивлении. Оно может включать дифференцирование или интегрирование сигналов таким образом, что достигается согласование их спектров. Кроме того, способ объединения гидрофонов с датчиками движения частиц может быть выполнен pz-суммированием, как описано выше, или любыми другими средствами, которые используются или изучаются, уменьшающими влияние кратных волн или режекции сигнала из-за волн-спутников. Подробно описанные выше варианты изобретения служат для пояснения изобретения и не ограничивают его объем.
Ниже приведена формула изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКАЯ СИСТЕМА С РЕЖЕКЦИЕЙ ВОЛНЫ-СПУТНИКА И ДВИЖЕНИЯ | 2011 |
|
RU2546997C2 |
| СИСТЕМА ШУМОПОДАВЛЕНИЯ СО СДВОЕННЫМ ДАТЧИКОМ ДЛЯ ПОДВОДНОЙ СЕЙСМОПРИЕМНОЙ КОСЫ | 2011 |
|
RU2569414C2 |
| СЕЙСМИЧЕСКИЙ ДАТЧИК С ДАТЧИКАМИ ПЕРЕМЕЩЕНИЯ СНИЖЕНИЯ ШУМА | 2014 |
|
RU2678261C2 |
| ОСЛАБЛЕНИЕ ВОЛН-СПУТНИКОВ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2005 |
|
RU2418308C2 |
| Способ приема сейсмоакустической и гидроакустической волн у дна водоема и устройство для его осуществления | 2020 |
|
RU2740334C1 |
| СОВМЕСТНЫЕ ИНТЕРПОЛЯЦИЯ И ПОДАВЛЕНИЕ ВОЛН-СПУТНИКОВ В СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2507543C2 |
| Способ регистрации сейсмических сигналов с целью поиска и разведки углеводородов в структурах подводных геологических массивов | 2015 |
|
RU2623202C2 |
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ОКЕАНА | 2002 |
|
RU2221261C1 |
| СПОСОБ КОРРЕКТИРОВКИ СЕЙСМИЧЕСКИХ ДАННЫХ ПРИ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКЕ | 2002 |
|
RU2282877C2 |
| СЕЙСМИЧЕСКИЕ ДАТЧИКОВЫЕ УСТРОЙСТВА | 2009 |
|
RU2528594C2 |
Изобретение относится к области геофизики и может быть использовано для проведения морских сейсморазведочных работ. Предложен многокомпонентный датчик акустической волны, распространяющейся в текучей среде, который реагирует на давление и на максимум три ортогональные компоненты движения частиц. Датчик является нечувствительным к движению корпуса датчика. Кроме того, он является по существу нечувствительным к турбулентному потоку акустической среды, проходящему мимо датчика. Технический результат - повышение точности и достоверности получаемых данных. 5 н. и 26 з.п. ф-лы, 14 ил.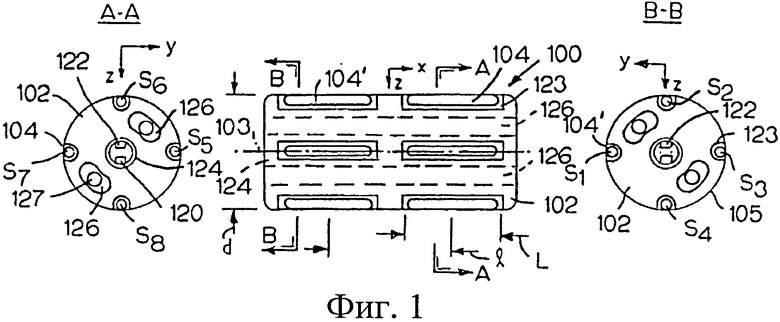
1. Датчик движения частиц подводных акустических волн, содержащий: жесткий корпус, имеющий периферию, вокруг которой дифрагирует подводная акустическая волна;
датчик градиента давления дифрагированной волны и движения частиц акустической волны, соединенный с жестким корпусом, реагирующий на дифрагированную акустическую волну и дополнительно формирующий выходной сигнал первого датчика, который соответствует движению частиц акустической волны и движению жесткого корпуса; и
датчик движения жесткого корпуса, прикрепленный к жесткому корпусу, формирующий выходной сигнал второго датчика, который соответствует почти полностью движению жесткого корпуса.
2. Датчик движения частиц подводных акустических волн по п. 1, дополнительно содержащий средство для объединения выходных сигналов первого и второго датчиков с формированием в результате отклика на движение частиц акустической волны за исключением движения жесткого корпуса.
3. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик градиента давления дифрагированной волны и движения частиц акустической волны содержит ряд датчиков давления, длина которых превышает характеристическую длину вихрей, образованных турбулентным потоком, для обеспечения их нечувствительности к псевдодавлению турбулентного потока, проходящего мимо датчика движения частиц подводных акустических волн.
4. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик градиента давления дифрагированной волны и движения частиц акустической волны содержит:
ряд датчиков давления акустических волн, установленных в жестком корпусе, причем датчики давления акустических волн имеют индивидуальные частотные отклики; и
средство для объединения индивидуальных частотных откликов с формированием в результате выходного сигнала первого датчика;
причем индивидуальные частотные отклики датчиков давления акустических волн согласованы в пределах рабочего диапазона частот, чтобы ослаблять
отклик выходного сигнала первого датчика на давление акустической волны до более низкого уровня, чем отклик на движение частиц акустической волны.
5. Датчик движения частиц подводных акустических волн по п. 4, где индивидуальные частотные отклики датчиков давления акустических волн согласованы по амплитуде и фазе в пределах диапазона рабочих частот с точностью до ±0,1%.
6. Датчик движения частиц подводных акустических волн по п. 4, где средство для объединения индивидуальных частотных откликов вычитает частотные отклики пар датчиков давления акустических волн с формированием в результате дифференциального частотного отклика для каждой из пар, образующего выходной сигнал первого датчика.
7. Датчик движения частиц подводных акустических волн по п. 1, где датчик градиента давления дифрагированной волны и движения частиц акустической волны содержит:
ряд датчиков давления акустических волн, каждый из которых формирует отдельный сигнал датчика давления;
средство для вычисления взаимных корреляций между каждым из отдельных сигналов датчиков давления и сложным сигналом давления, отображающим сумму отдельных сигналов датчиков давления, с получением в результате поправок по амплитуде и фазе, вносимых в каждый из отдельных сигналов датчиков давления.
8. Датчик движения частиц подводных акустических волн по п. 1 или 2, где жесткий корпус имеет центральную продольную ось симметрии и акустические волны дифрагируют вокруг периферии и где датчик градиента давления дифрагированной волны и движения частиц акустической волны работает как датчик градиента давления вдоль центральной продольной оси симметрии и как двухосный датчик градиента давления дифрагированной волны вдоль двух ортогональных осей, перпендикулярных центральной продольной оси симметрии.
9. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик градиента давления дифрагированной волны и движения частиц акустической волны содержит ряд датчиков давления акустических волн, скомпонованных в
виде пар расположенных в одну линию в продольном направлении датчиков давления акустических волн, расставленных с равными интервалами по окружности вокруг периферии жесткого корпуса.
10. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик градиента давления дифрагированной волны и движения частиц акустической волны и датчик движения жесткого корпуса являются трехосными датчиками, реагирующими на движение вдоль одной или более ортогональных осей.
11. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик градиента давления дифрагированной волны и движения частиц акустической волны содержит ряд датчиков давления акустических волн в равноудаленных друг от друга местах вокруг периферии жесткого корпуса.
12. Датчик движения частиц подводных акустических волн по п. 1 или 2, где жесткий корпус содержит выемку для размещения в ней датчика движения жесткого корпуса изолированно от дифрагированной акустической волны.
13. Датчик движения частиц подводных акустических волн по п. 1 или 2, где датчик движения жесткого корпуса имеет частотный отклик, включающий постоянный ток, для считывания гравитации.
14. Датчик движения частиц подводных акустических волн по п. 1 или 2, дополнительно содержащий датчик ориентации, совмещенный с датчиком движения жесткого корпуса.
15. Датчик движения частиц подводных акустических волн по п. 1 или 2, где жесткий корпус расположен в автономном подводном регистрирующем устройстве.
16. Датчик движения частиц подводных акустических волн по п. 1 или 2, где жесткий корпус расположен в автономном подводном транспортном средстве, движущемся через водное пространство.
17. Датчик движения частиц подводных акустических волн по п. 1, где жесткий корпус является в основном цилиндрическим с наружной периферией и центральной продольной осью симметрии и углублениями, открывающимися к
наружной периферии в местах, расположенных по окружности на удалении друг от друга, причем датчик градиента давления дифрагированной волны и движения частиц акустической волны дополнительно содержит ряд датчиков давления акустических волн, каждый из которых постоянно находится в одном из углублений.
18. Датчик движения частиц подводных акустических волн по п. 17, где углубления расположены вокруг периферии с равными интервалами.
19. Датчик движения частиц подводных акустических волн по п. 17, где углубления расположены попарно с интервалом относительно друг друга в продольном направлении.
20. Система обнаружения подводных акустических волн, содержащая подводный кабель и датчик движения частиц акустических волн по любому из пп. 1-14 и 17-19, соединенный с подводным кабелем.
21. Система обнаружения подводных акустических волн по п. 20, где датчик движения частиц подводных акустических волн содержит средство для объединения выходных сигналов первого и второго датчиков с формированием в результате отклика на движение частиц акустической волны за исключением движения жесткого корпуса, причем средство для объединения удалено от жесткого корпуса.
22. Система обнаружения подводных акустических волн по п. 20, где жесткий корпус размещен в подводном кабеле.
23. Система обнаружения подводных акустических волн по п. 20, дополнительно содержащая внешнее устройство, прикрепленное к подводному кабелю, причем жесткий корпус расположен во внешнем устройстве.
24. Система обнаружения подводных акустических волн по п. 23, где подводный кабель представляет собой буксируемую сейсмоприемную косу, а внешнее устройство представляет собой устройство позиционирования кабеля.
25. Система обнаружения подводных акустических волн по п. 20, где подводный кабель представляет собой буксируемую сейсмоприемную косу и дополнительно содержит устройство позиционирования кабеля, прикрепленное к буксируемой
сейсмоприемной косе и имеющее управляющую лопасть, причем датчик градиента давления и движения частиц акустической волны расположен в управляющей лопасти.
26. Система обнаружения подводных акустических волн по п. 20, где подводный кабель представляет собой буксирный трос или кабель и дополнительно содержит крепежные приспособления для закрепления жесткого корпуса к буксирному тросу или кабелю в местах, расположенных на удалении друг от друга вдоль длины буксирного троса или кабеля.
27. Способ определения отклика на акустические волны в текучей среде, включающий:
прием сигналов акустического давления от ряда датчиков давления, установленных на периферии жесткого корпуса, расположенного в текучей среде, и дифрагирование акустических волн вокруг периферии;
формирование сигналов градиента давления из сигналов акустического давления, которые включают отклики на акустические волны, отклики, вызванные движением жесткого корпуса, и отклики, вызванные прохождением текучей среды мимо датчиков давления в жестком корпусе;
прием сигналов движения жесткого корпуса датчиком движения, соединенным с жестким корпусом;
формирование сигналов датчика движения, которые включают отклики, вызванные движением жесткого корпуса, и отклики, вызванные прохождением текучей среды мимо датчика движения; и
объединение сигналов градиента давления и датчика движения с формированием в результате выходного сигнала, который включает отклик на акустические волны и является по существу независимым от сигналов, соответствующих движению жесткого корпуса или прохождению текучей среды мимо датчиков давления и движения.
28. Способ по п. 27, дополнительно включающий согласование по амплитуде и фазе откликов датчиков давления в пределах рабочего диапазона частот.
29. Способ по п. 27 или 28, дополнительно включающий:
вычисление взаимных корреляций между каждым из сигналов акустического давления и сложным сигналом давления, представляющим собой сумму сигналов акустического давления от всех датчиков давления;
получение из взаимных корреляций поправок по амплитуде и фазе; и
внесение поправок по амплитуде и фазе в сигналы акустического давления.
30. Машинно-читаемый носитель данных, хранящий данные, отображающие, по меньшей мере, один из сигналов акустического давления, сигналов градиента давления, сигналов движения жесткого корпуса, сигналов движения датчиков и выходного сигнала, принятых или сформированных в соответствии со способом по любому из пп. 27-29.
31. Машинно-читаемый носитель данных, хранящий машинно-читаемые команды, которые, когда они исполняются процессором, осуществляют способ по любому из пп. 27-29.
| US 6775618 B1 ,10.08.2004 | |||
| US 6128251 A1 , 03.10.2000 | |||
| US 20060203611 A1 , 14.09.2006 | |||
| US 20080253226 A1 ,16.10.2008 | |||
| US 20060215490 A1 ,28.09.2006 | |||
| US 20090067285 A1 ,12.03.2009 |

