Изобретение относится к измерительным океанографическим приборам, предназначенным для определения характеристик окружающей среды, преимущественно - пограничного слоя атмосферы и океана.
Известен метеорологический радиозонд [1] для измерения параметров атмосферы, содержащий газонаполненную оболочку, к которой посредством стропа прикреплен приборный контейнер. Радиозонд запускается в верхние слои атмосферы, где свободно дрейфует под действием воздушных потоков и передает научную информацию по радиоканалу. При соответствующей балластировке (заданном соотношении общего веса зонда и грузоподъемности оболочки, заданном конструктивном исполнении) такой радиозонд может дрейфовать, как буй, измеряя параметры пограничного слоя атмосферы и океана. Этот радиозонд выбран в качестве прототипа. Он характеризуется следующими признаками, сходными с существенными признаками заявленного изобретения: газонаполненная оболочка, к которой посредством стропа прикреплен приборный контейнер, наличие соотношения веса зонда и грузоподъемности оболочки.
Недостатком прототипа является малая, по сравнению со скоростью ветра, скорость дрейфа радиозонда из-за силы сопротивления, что снижает точность проводимых измерений. В океанологии и гидродинамике различают эйлеровский и ла-гранжевый подходы. В первом случае измеряется скорость потока в данной фиксированной точке, а во втором - отслеживается траектория жидкой частицы, поэтому необходимым условием повышения точности измерений, проводимых лагранжевым методом, является приближение скорости дрейфа радиозонда-буя к скорости ветра.
Другим недостатком является невозможность радиозонду удержаться в пределах требуемого диапазона высот - при сильном ветре оболочка может подняться слишком высоко над водой или прижаться к воде, что также снижает точность определения характеристик именно заданного диапазона приводной среды.
Недостатком также является то, что при большом приборном блоке зонд-буй испытывает большие динамические нагрузки из-за порывов воздуха и волнения морской поверхности.
В основу изобретения поставлена задача создания конструкции океанографического надповерхностного дрейфующего радиозонда-буя, существенные признаки которого позволяют осуществить заданную балластировку зонда и обеспечить особенность процесса его движения под действием воздушного потока.
Поставленная задача решается тем, что в радиозонде-буе, содержащем приборный блок, соединенный стропом с газонаполненной оболочкой, грузоподъемность которой соотносится с весом радиозонда-буя, новым является то, что на стропе закреплено крыло, которое имеет постоянное положение относительно оси натянутого стропа, вес в воздухе радиозонда-буя превышает на заданную величину грузоподъемность оболочки, при этом приборный блок включает в себя электрически связанные верхний блок, закрепленный на стропе, например, вблизи оболочки, и нижний блок, который закреплен на нижнем конце стропа и выполнен в виде одного конструктивного элемента или нескольких конструктивных элементов, соединенных гибкой связью.
Совокупность существенных признаков заявленного технического решения позволяет устранить недостатки прототипа.
Введение аэродинамической поверхности (крыла) не только позволило создать дополнительную подъемную силу и парусность. Признак "крыло" во взаимосвязи с другими признаками изобретения, такими, как "крыло имеет постоянное положение относительно оси натянутого стропа", "вес в воздухе зонда превышает на заданную величину грузоподъемность оболочки", "приборный блок включает в себя электрически соединенные верхний и нижний блоки", обусловливают новые технические свойства, не присущие известным аналогам - значительное увеличение скорости дрейфа радиозонда-буя и автоматическое обеспечение дрейфа именно в заданном диапазоне высот. Эти новые технические свойства особенно проявляются при лагранжевом методе измерений, требующем максимального приближения скорости движения зонда к скорости ветра. Выполнение приборного блока в виде разнесенных в пространстве верхнего и нижнего блоков (контейнеров), а также выполнение нижнего блока в виде одного конструктивного элемента или нескольких элементов, соединенных гибкой связью, обеспечивают еще одно новое техническое свойство - снижение динамических нагрузок на конструкцию зонда при увеличении количества измеряемых параметров, более точная балластировка зонда и обеспечение работы измерителей именно в соответствующих средах - в воздушной или водной.
Указанные новые технические свойства обусловливают достижение технического результата изобретения - повышение точности определения параметров заданного пограничного слоя атмосферы и океана.
Сущность изобретения поясняется с помощью описания процесса дрейфа радиозонда-буя (в допущении, что турбулентность воздушного потока отсутствует) со ссылкой на иллюстрации, на которых схематично изображено: на фиг. 1 - зонд при отсутствии ветра; на фиг. 2 - зонд при наличии ветра; на фиг. 3 - момент, когда зонд под действием сильного ветра оторвал нижний приборный контейнер от воды и совершает маятниковое движение; на фиг. 4 - случай, когда после маятникового движения зонда не происходит касания нижнего приборного контейнера с водой.
Радиозонд-буй (фиг. 1) содержит: оболочку 1, наполненную газом, например, гелием; строп 2, который прикреплен к оболочке 1; приборный блок, который включает в себя электрически соединенные верхний приборный блок (контейнер) 3, закрепленный вверху стропа 2, преимущественно вблизи оболочки 1, и нижний приборный блок (контейнер) 4, прикрепленный к нижнему концу стропа 2; крыло 5, закрепленное, преимущественно, в верхней части стропа, под верхним приборным блоком 3. Крыло 5 может быть выполнено в виде одной аэродинамической поверхности заданной формы, или в виде нескольких аэродинамических поверхностей, закрепленных друг под другом. В данном примере представлено крыло 5 в виде одной плоской поверхности. Крыло 5 закреплено на стропе 2 так, что строп проходит сквозь него, и зафиксировано снизу и сверху с помощью растяжек 6. Растяжки 6 обеспечивают постоянство положения крыла 5 относительно оси натянутого стропа 2 (с люфтом, который допускает технология сборки). В данном случае растяжки обеспечивают прямой угол наклона плоского крыла к натянутому стропу. Нижний приборный блок 4 может быть выполнен в виде одного конструктивного элемента, например, как показано на иллюстрациях, в виде одного плавучего приборного контейнера обтекаемой формы, или в виде нескольких конструктивных элементов, соединенных гибкой связью, - например, в виде погруженной в воду приборной "косы" (гирлянды измерителей), или в виде соединенных кабель-тросом нескольких плавучих приборных контейнеров обтекаемой формы.
Конструктивные параметры заявленного зонда могут быть, например, такими: при малой автономности зонда, например, 7 дней, и большой долей веса, приходящейся на элементы питания, оболочка 1 зонда выполнена эластичной или фольгированной и имеет диаметр приблизительно 2 м, объем - около 3 м3 и грузоподъемность - 3,0 кг. Лучшими в мире считаются японские оболочки фирмы "ТО-ТЕХ" [2]. Строп 2, кроме механического соединения элементов конструкции зонда, обеспечивает электрическую связь между приборами, поэтому, в зависимости от задач, в качестве стропа 2 может быть использован, например, провод полевой двухжильный П-274М или кабель-трос, изготовленный в лабораторных условиях, представляющий собой витую пару изолированных проводников типа МГТФ и грузонесущий сердечник из троса диаметром 1 мм, помещенные в оболочку из термоусаживаемой трубки. Длина стропа равна, например, 20 м. В данном примере в нижнем приборном контейнере 4 весом 0,5 кг расположен датчик температуры воды. Крыло 5 представляет собой, например, четырехугольный каркас с натянутой на него тонкой лавсановой тканью. Вес крыла площадью 0,75 м2 с растяжками из капроновых нитей составляет 0,25 кг. В верхнем приборном контейнере 3 располагают основную массу научных приборов, таких, как датчик скорости и направления ветра, альтиметр (измеритель высоты над уровнем моря), GPS-приемник, акселерометр для регистрации траектории движения оболочки, датчик температуры и влажности воздуха, система спутниковой связи, а также элементы питания. В данном примере, при небольшой грузоподъемности оболочки, зонд-буй балластируют следующим образом. Общий вес научных приборов в верхнем приборном контейнере 3 составляет около 2,2 кг. При этом суммарный вес оборудования радиозонда без учета веса нижнего приборного контейнера 4 составляет 3,0 кг, то есть, равен грузоподъемности оболочки 1. Это означает, что газонаполненная оболочка держит в воздухе всю конструкцию радиозонда, кроме нижнего приборного контейнера, который остается на плаву.
В общем случае соотношение общего веса зонда в воздухе и грузоподъемности газонаполненной оболочки задается расчетным и опытным путем, исходя из требования стабильного натяжения стропа и из конкретных условий, таких, как конструктивные параметры зонда, максимальная требуемая высота его подъема над поверхностью воды, вес каждого из контейнеров приборного блока, необходимость нахождения нижнего контейнера на плаву или заглубления его в воду на определенный горизонт, предполагаемые климатические и метеоусловия в исследуемом районе акватории. Одним из главных направлений при этом является минимизация веса зонда и размера оболочки.
Вышеприведенным распределением нагрузок обеспечивается заданное изобретением движение зонда-буя при его дрейфе.
Постановка зонда в исследуемой акватории осуществляется с борта судна или летательного аппарата, а также с берега. Радиозонд-буй движется следующим образом. При полном отсутствии ветра (фиг. 1) газонаполненная оболочка 1 стремится вверх, обеспечивая натяжение стропа 2, его вертикальное положение, вследствие действия на строп вертикальной, направленной вверх, силы, равной грузоподъемности оболочки. В данном примере вес в воздухе всей конструкции зонда превышает грузоподъемность оболочки на величину веса нижнего приборного контейнера 4, поэтому плавучий нижний приборный контейнер 4 продолжает оставаться на воде. Жестко установленное плоское крыло 5 при вертикальном положении стропа 2 располагается горизонтально. Из-за отсутствия набегающего воздушного потока крыло 5 не создает подъемной силы, парусности нет. В таком положении зонд перемещается только под влиянием течения, которое воздействует на нижний приборный контейнер 4.
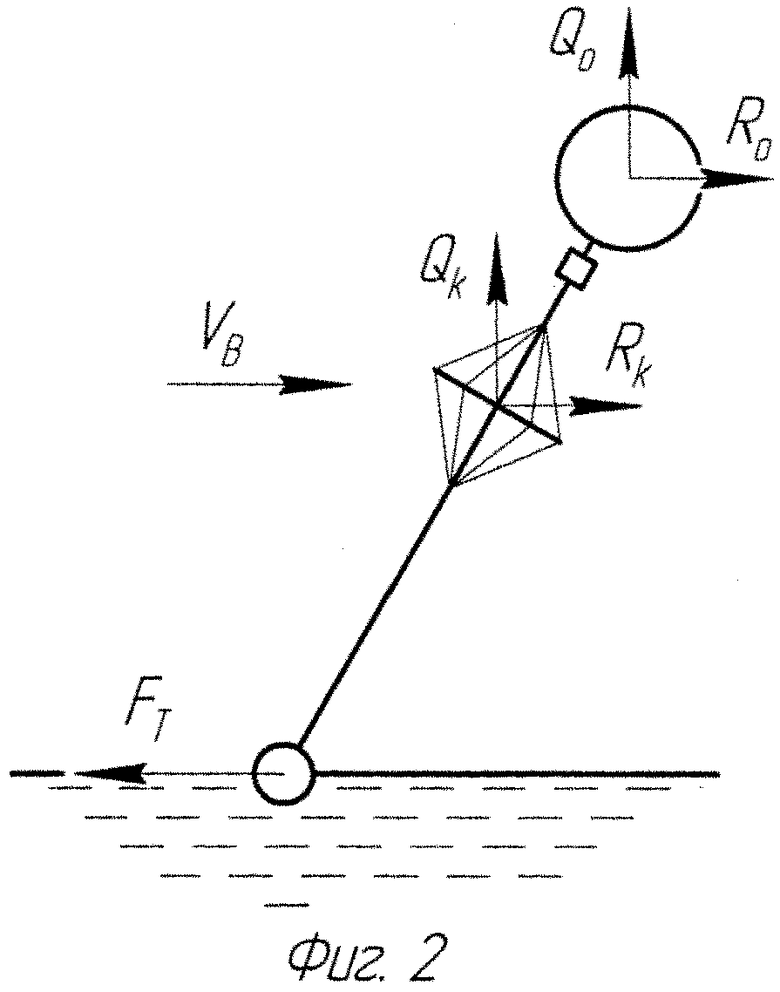
При наличии ветра (фиг. 2), скорость которого равна VB, строп отклоняется от вертикали под действием на оболочку горизонтальной силы давления ветра R0, парусности. Наклон стропа вызван тем, что оболочка стремится двигаться вперед по направлению ветра, а нижний приборный контейнер, находящийся в воде, создает сопротивление FT этому движению. Если сравнить с прототипом - в нем из-за силы сопротивления FT при большом ветре происходит пригибание оболочки к морской поверхности или даже ее прижимание к воде. В отличие от прототипа, в заявленном изобретении исключено прижимание оболочки, даже при значительном увеличении силы ветра - крыло не позволит оболочке опуститься слишком низко к поверхности океана. Заявленный зонд работает как система автоматического регулирования - он дрейфует именно в определенном, ограниченном сверху и снизу, диапазоне высот. Это поясняется следующим. Наклон стропа (под действием силы давления ветра R0 и силы сопротивления FT) создает угол атаки на крыло, в результате чего возникает дополнительная подъемная сила QK, направленная вверх, как и сила грузоподъемности оболочки Q0. Эта дополнительная подъемная сила суммируется с грузоподъемностью оболочки. Когда скорость ветра достигнет некоторой величины и к грузоподъемности оболочки прибавится достаточная подъемная сила крыла, оболочка и крыло, действуя совместно, вытащат нижний приборный контейнер из воды. Из-за уменьшения силы сопротивления скорость дрейфа радиозонда резко возрастет.
Рост подъемной силы крыла QK при возрастании скорости набегающего на крыло потока воздуха происходит по двум причинам. Первая - это непосредственно сама величина VB скорости ветра. Но кроме того, рост скорости ветра вызывает увеличение наклона стропа, а вместе с ним - и увеличение угла атаки на крыло, что также автоматически приводит к росту QK. Подъемная сила крыла, рост которой связан с усилением ветра, не позволяет оболочке зонда опускаться к поверхности воды, а, наоборот, стремится поднять ее вверх. То есть, сила ветра, которая стремится прижимать оболочку к поверхности океана, с помощью крыла преобразуется в подъемную силу, препятствующую этому процессу.
Необходимо подчеркнуть, что любые изменения угла наклона натянутого стропа приводят к изменению угла наклона крыла и, соответственно, - к изменению подъемной силы крыла. Такая зависимость обеспечивается жесткой фиксацией плоскости крыла относительно оси стропа сверху и снизу растяжками.
Таким образом, рост скорости ветра приводит к росту подъемной силы крыла QK и увеличению скорости дрейфа зонда, крыло не позволяет оболочке опускаться к воде ниже заданного горизонта, причем действие крыла в необходимом направлении происходит в автоматическом режиме. Кроме подъемной силы QK на крыло действует и горизонтальная сила давления ветра RK (парусность), которая также увеличивает скорость дрейфа.
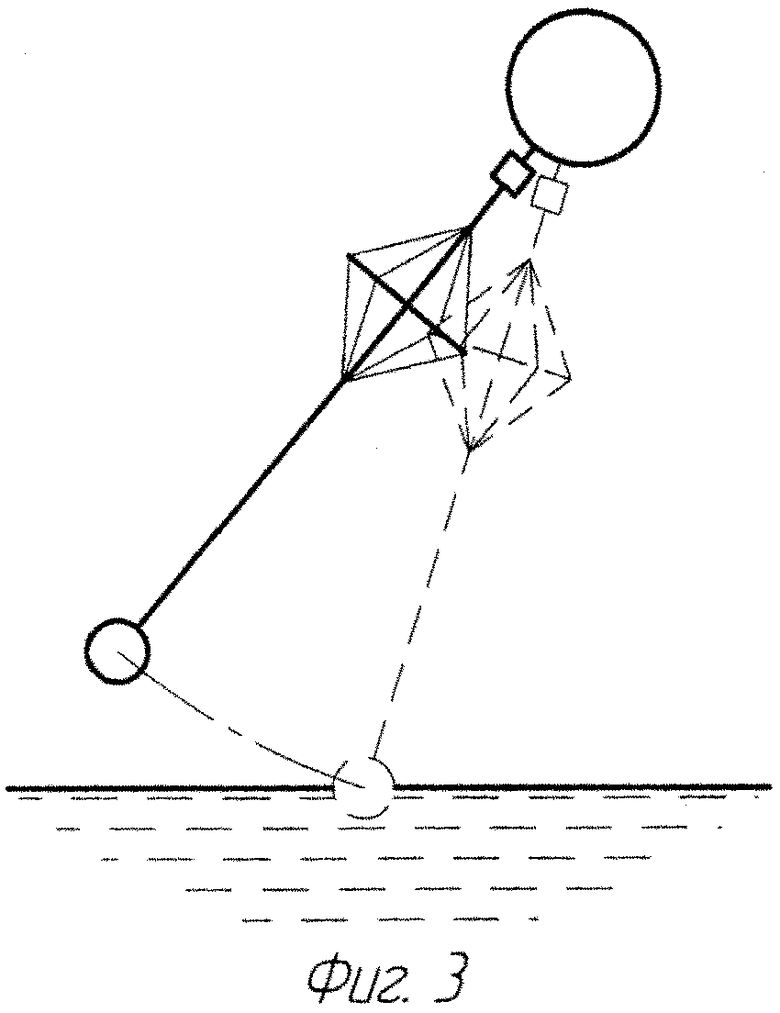
Далее, как только нижний приборный контейнер будет поднят на некоторую высоту над водой (фиг. 3), из-за наклона стропа нижний приборный контейнер, действуя как маятник, точка подвеса которого находится вверху зонда впереди по ветру, начнет двигаться вперед по ветру к состоянию равновесия, то есть, к положению, при котором строп будет располагаться вертикально. Это маятниковое движение зонда будет сопровождаться снижением подъемной силы крыла из-за уменьшения угла атаки на него и приведет к касанию нижним приборным контейнером воды (такое положение показано пунктиром).
Если же зонд успеет подняться выше над водой (фиг. 4), то после окончания маятникового движения нижнего контейнера, при вертикальном положении стропа, не произойдет касания нижнего приборного контейнера воды - он зависнет на высоте h (левое пунктирное изображение), максимальная величина которой задана балластировкой. Из-за того, что грузоподъемность оболочки меньше веса зонда на величину веса нижнего приборного контейнера, а также из-за равенства нулю подъемной силы крыла при таком положении стропа, зонд будет снижаться до момента касания нижнего приборного контейнера поверхности воды (правое пунктирное изображение). Так система крыло-груз (в систему входят все элементы зонда) автоматически ограничивает высоту подъема зонда.
Затем все повторится: нижний приборный контейнер вновь создаст силу торможения, наклон стропа приведет к увеличению угла атаки на крыло, возникнет дополнительная подъемная сила, зонд оторвется от воды и совершит маятниковое движение, затем зонд снова будет опускаться, касаться воды и проскальзывать по водной поверхности при сильном ветре, затем - снова подниматься. Процессы, происходящие с зондом, будут циклическими, будут повторяться друг за другом в приведенной последовательности. Траектория движения газонаполненной оболочки будет иметь волнообразный характер и будет осуществляться в ограниченном балластировкой, в том числе длиной стропа и регулировкой крыла, диапазоне высот.
Для снижения динамических нагрузок на строп и на всю систему, возникающих в результате волнообразных движений оболочки, большой по содержанию нижний приборный контейнер выполняют в виде ряда плавучестей, соединенных между собой гибкой связью.
Заметим, что большая скорость ветра, турбулентность и волнение океана могут вносить элемент неопределенности в характер движения зонда, возможны кратковременные выходы его из заданного горизонта высот, однако такое нештатное поведение зонда может быть выявлено с помощью данных альтиметра и в соответствии с этими данными измеряемые параметры могут быть отфильтрованы, то есть, погрешность может быть учтена в результатах измерений.
Сущность заявленного изобретения пояснена на примере конструкции зонда с небольшой грузоподъемностью - 3,0 кг. Однако даже ограниченная несколькими сутками автономная работа зонда может быть оправдана с точки зрения получаемой научной информации - зонд способен, при средней скорости ветра 5 м/с и скорости дрейфа, предположительно, 2 м/с, за одни сутки сделать "разрез" над поверхностью океана длиной более 170 км. Соответственно за 7 дней - 1200 км. Для выполнения "разреза" такой длины при использовании даже самого малого морского судна необходимы затраты в несколько тысяч долларов. Заявленный зонд способен передавать информацию из районов ураганов, где нахождение судов нежелательно, но в которых исследование турбулентного пограничного слоя океан-атмосфера представляет большой научный интерес. Он дает уникальную возможность проводить исследования в условиях, приближенных к требованиям лагранжевой методики измерений.
При кажущейся простоте изобретение обеспечивает очень важное в океанографии качество - повышение точности проводимых измерений параметров атмосферы в пограничном слое океана, как за счет автоматического удерживания свободно дрейфующего радиозонда-буя в требуемом диапазоне высот над поверхностью воды, так и за счет увеличения скорости дрейфа.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕЛЕМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ В ПРИБРЕЖНОЙ ЗОНЕ МОРЯ | 2021 |
|
RU2810706C2 |
| Аэрогидродинамический промысловый буй и способ промысла поверхностных объектов лова | 2016 |
|
RU2641898C1 |
| АЭРОСТАТ ВЕТРОЭНЕРГЕТИЧЕСКИЙ | 2017 |
|
RU2662101C1 |
| ВОЗДУШНО-ТРОСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА КУЩЕНКО В.А. | 2007 |
|
RU2356765C1 |
| Привязной аэростат | 2019 |
|
RU2722087C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| Автономный дрейфующий профилирующий океанологический буй | 2015 |
|
RU2609849C1 |
| НАЗЕМНО-ГЕНЕРАТОРНЫЙ ВЕТРОДВИГАТЕЛЬ | 2017 |
|
RU2638237C1 |
| СОВОКУПНОСТЬ ВОЗДУШНЫХ ПЛАТФОРМ СВЯЗИ И СПОСОБ ИХ ИСПОЛЬЗОВАНИЯ | 2000 |
|
RU2257016C2 |


Изобретение относится к измерительным океанографическим приборам, предназначенным для определения характеристик окружающей среды, преимущественно - пограничного слоя атмосферы и океана.
Технический результат - повышение точности определения параметров заданного пограничного слоя приводной среды.
Сущность: радиозонд-буй содержит: газонаполненную оболочку 1, к которой посредством стропа 2 прикреплен приборный блок, который включает в себя электрически соединенные верхний приборный блок (контейнер) 3, закрепленный вверху стропа 2, преимущественно вблизи оболочки 1, и нижний приборный блок (контейнер) 4, прикрепленный к нижнему концу стропа 2. Зонд содержит крыло 5, закрепленное на стропе, преимущественно, в верхней его части, под верхним приборным блоком 3. Крыло 5 установлено так, что его положение зафиксировано относительно оси натянутого стропа 2 - строп проходит сквозь крыло, крыло снизу и сверху зафиксировано растяжками 6. Крыло 5 может быть выполнено в виде одной аэродинамической поверхности заданной формы, или в виде нескольких аэродинамических поверхностей, закрепленных друг под другом. Нижний приборный блок 4 может содержать один конструктивный элемент - например, может быть выполнен в виде одного плавучего приборного контейнера обтекаемой формы, или может содержать несколько конструктивных элементов, соединенных гибкой связью, - например, может быть выполнен в виде погруженной в воду приборной "косы" (гирлянды измерителей) или в виде соединенных кабель-тросом нескольких плавучих приборных контейнеров обтекаемой формы.
Зонд-буй обеспечивает очень важное в океанографии свойство - автоматическое ограничение по высоте его свободного дрейфа, а также увеличение скорости дрейфа; максимальное приближение скорости дрейфа к скорости ветра, что дает возможность проводить исследования параметров среды с высокой точностью, особенно - в случае применения лагранжевой методики измерений. Он способен передавать информацию из районов ураганов, где нахождение судов нежелательно, но в которых исследование турбулентного пограничного слоя океан/атмосфера представляет большой научный интерес. 4 ил.
Океанографический надповерхностный дрейфующий радиозонд-буй, содержащий приборный блок, соединенный стропом с газонаполненной оболочкой, грузоподъемность которой соотносится с весом радиозонда-буя, отличающийся тем, что на стропе закреплено крыло, которое имеет постоянное положение относительно оси натянутого стропа, вес в воздухе радиозонда-буя превышает на заданную величину грузоподъемность оболочки, при этом приборный блок включает в себя электрически соединенные верхний блок, закрепленный в верхней части стропа, и нижний блок, закрепленный на нижнем конце стропа и выполненный в виде одного элемента или нескольких элементов, соединенных гибкой связью.

