ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, главным образом, к управлению помехами в беспроводных сетях связи и, более конкретно к поддержке сигнализации, связанной с глушением опорных сигналов для снижения помех в беспроводных сетях связи, которые осуществляют передачу опорных сигналов, например, для измерения местоположения.
УРОВЕНЬ ТЕХНИКИ
Возможность определения географического положения пользователя в сети сделала возможным огромное разнообразие коммерческих и некоммерческих услуг, например, навигационную поддержку, построение социальных сетей связи, извещение о местоположении, экстренные вызовы и т.д. Различные услуги могут иметь различные требования по точности определения местоположения, задаваемые приложением. Дополнительно, в некоторых странах существуют некоторые нормативные требования по точности определения местоположения для основных аварийных служб. Служба спасения 911 в США (FCC E911) предстает в качестве одного примера регулируемых требований.
Во многих средах местоположение может быть точно установлено при помощи использования способов определения местоположения на основе GPS (Глобальной системы определения местоположения). В наши дни сети также часто имеют возможность поддерживать объекты пользовательского оборудования (UE), улучшать их чувствительность приемника и характеристики старта GPS (называется ассистированное определение местоположения GPS или A-GPS). Однако приемники GPS или A-GPS не обязательно могут иметься в беспроводных оконечных устройствах. Дополнительно известно, что GPS часто терпит неудачу в пространствах внутри помещения и в городских каньонах. По этой причине 3GPP был стандартизован дополнительный способ определения наземного местонахождения, называемый наблюдаемой разностью времени приема сигналов (OTDOA).
При помощи OTDOA оконечное устройство измеряет разность времен для нисходящих опорных сигналов, принятых из множества удаленных мест. В качестве примера, конкретное UE принимает нисходящие опорные сигналы от поддерживающей, или опорной соты, и от некоторого количества соседних сот. Для каждой (измеряемой) соседней соты UE измеряет разность времени приема опорного сигнала (RSTD), которая представляет собой относительную разность времени между соседней сотой и опорной сотой. В этом случае значение местоположения UE находится как точка пересечения гипербол, соответствующих измеренным RSTD. Требуется, по меньшей мере, три измерения от географически распределенных базовых станций с хорошей геометрией для того, чтобы выяснить две координаты оконечного устройства и эталонное время приемника оконечного устройства. Расчеты по определению местонахождения могут производиться, например, сервером для определения местонахождения (E-SMLC или SLP в LTE) или UE. Предшествующий подход соответствует режиму определения местонахождения с ассистируемым UE, в то время как последующий соответствует режиму определения местонахождения на основе UE.
Для того чтобы предоставить возможность определения местонахождения в LTE и обеспечить проведение измерений по определению местоположения надлежащего качества и для значительного количества удаленных мест, в 3GPP были представлены новые физические сигналы, предназначенные для определения местоположения (опорные сигналы для определения местоположения или PRS), и были установлены подкадры для определения местоположения с малым уровнем помех. Для более детальной информации о RPS следует смотреть 3GPP TS 36.211, Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation.
Более широко PRS передаются в соответствии с предварительно определенным алгоритмом, и следуя одной из предварительно определенных конфигураций PRS, каждая из которых определяется: шириной полосы передачи PRS, числом последовательных подкадров для определения местоположения (NPRS), определенного как событие определения местоположения PRS, и периодичность событий PRS, состоящей из TPRS, измеренного в подкадрах, т.е. интервал времени между двумя событиями определения местонахождения. Фиг. 1 отображает это отличительное назначение для распределения подкадров в данной соте сети. (Следует отметить, что «сота» относится к определенной зоне покрытия, например, находящейся под управлением данной базовой станции. Каждая базовая станция в пределах радиодоступа части сети может управлять одной сотой, или более, чем одной сотой, но опорные сигналы обычно передаются для каждой такой удаленной соты). Значения, которые в настоящее время разрешены стандартами TPRS, представляют собой 160, 320, 640 и 1280 подкадров, и число NPRS последовательных подкадров представляет собой 1,2,4 или 6 (снова см. 3GPP TS 36.211).
Поскольку определение местоположения OTDOA требует измерения сигналов PRS из множества удаленных мест, приемник UE должен иметь возможность справиться с ситуацией, в которой некоторые из PRS приняты на более слабых уровнях сигнала. Например, PRS от данной соседней соты может быть намного слабее на UE, чем те, которые идут от обслуживающей соты. В качестве дополнительной сложности, UE без приблизительного знания того, когда PRS ожидаются к прибытию, и в соответствии с каким алгоритмом обязано выполнить поиск сигнала в пределах большого окна. Такая обработка влияет на время и точность измерений и непроизвольно увеличивает уровень сложности UE.
Следовательно, для того, чтобы упростить измерение PRS со стороны UE, сеть осуществляет передачу «ассистирующих данных». Среди прочего ассистирующие данные включают в себя информацию опорной соты, списки соседних сот, содержащие PCI (ID физической соты) соседних сот, число последовательных нисходящих подкадров, занятых PRS, ширину полосы передачи PRS, частоту и т.д.
Однако в качестве другой сложности, относящейся к измерению PRS, PRS, переданный любой данной сотой, может передаваться с нулевой или очень низкой мощностью, из которых оба случая могут называться глушением. Глушение применяется ко всем элементам источников PRS в пределах определенного периода времени (например, одного подкадра или одного события определения местоположения PRS) по всей ширине полосы передачи PRS. Глушение PRS обеспечивает механизм для уменьшения помех в измерениях PRS, например, глушение передачи PRS в одной соте позволяет осуществить лучшие измерения PRS, переданных в другую соту. Хотя могут существовать стандартизованные подходы к передаче PRS, не существует никакой подобной стандартизации, касающейся конкретных использующихся алгоритмов глушения.
Определенные подходы к глушению обсуждались в контексте 3GPP. Один подход опирается на случайное глушение сотами, где каждая базовая станция (eNodeB в LTE) решает, глушатся ли ее передачи PRS или нет для данного события определения местоположения в соответствии с некоторой вероятностью. В простом или случайном варианте исполнении не существует координирования среди eNodeB, и вероятность конфигурируется статически для каждого eNodeB или для каждой соты. Случайное глушение предоставляет то преимущество, что не требуется никакой сигнализации, поскольку каждый eNodeB принимает решение о глушении автономным образом, в соответствии со сконфигурированной вероятностью. Однако подход имеет недостатки.
Например, реальные сети не являются однородными. Они имеют различные зоны покрытия сот и плотность пользователей, и, возможно, различные типы базовых станций. Эти различия подразумевают, что установка оптимальных вероятностей глушения представляет собой трудоемкую задачу. К тому же случайное глушение не обеспечивает UE информацией о том, является ли или не является сота заглушенной для данного события определения местоположения, что усложняет измерения RSTD и увеличивает степень сложности UE. К тому же еще оптимальная схема вероятностей глушения также может изменяться, например, на протяжении дня или на протяжении недели и на основе соты, что делает статичные схемы не лучшим выбором с практической точки зрения.
Другой подход предусматривает ограниченный набор алгоритмов глушения и ставит в соответствие те алгоритмы множеству PCI. См., например, предложения, определенные как R1-093793, Muting for LTE Rel-9 OTDOA Positioning, 3GPP meeting #58bis, Oct. 2009, и как R1-092628, On serving cell muting for OTDOA measurements, 3GPPTSG-RAN WG1 meeting #57, June 2009.
Одно преимущество вышеуказанного подхода на основе установки соответствия представляет собой то, что будучи обеспеченным таблицей алгоритмов глушения и PCI, полученными в ассистирующей информации, любой данный UE может определить, когда PRS являются заглушенными в данной интересующей соте без передачи UE явным образом информации о глушении. Однако, как недостаток, алгоритмы глушения должны быть или жестко закодированы в UE (что предполагает, что решение не подходит всем UE) или получены из сети, для которой потребуется новая система сигнализации.
Как дополнительная сложность, установка соответствия алгоритмов глушения для PCI, вероятнее всего, не приведет к оптимальной схеме глушения в неоднородных реальных сетях, которые к тому же могут иметь многоуровневую структуру. Другими словами, такая схема глушения на основе установки соответствия будет зафиксирована и, вследствие этого, будет невозможно ее повторно оптимизировать, если только планирование PCI не будет переработано для всей сети конкретно для определения местоположения, что, вероятнее всего, будет являться менее всего желательным действием с точки зрения операторов сети.
Другие предложения задействуют передачу индикаторов глушения UE, определяющих, является ли активированным или нет автономное глушение для данной соты. См., например, 3GPP RP-100190, Autonomous muting in DL OTDOA, Motorola, March 2010 и см. CR к 3GPP TS 36.355, Autonomous muting in indication in OTDOA assistance information, Motorola, March 2010. В соответствии с такими подходами, осуществляется передача булева индикатора для опорной соты и также для всех соседних сот как часть ассистирующей информации, когда бы PRS ни передавались. Когда индикатор имеет значение FALSE, UE могут избежать обнаружения вслепую глушения PRS, оптимизировать обнаружение пороговых значений и, таким образом, улучшить выполнение задачи определения местонахождения. Если индикатор установлен в значение TRUE, то UE по-прежнему не принимает информацию о том, когда и в каких блоках ресурсов (RB) происходит глушение, что означает, что UE по-прежнему требуется обнаруживать вслепую, когда глушение PRS используется в каждой соте, т.е. предложение не решает проблем, связанных с обнаружением вслепую.
В качестве альтернативы, которая упрощает требования UE, было предложено убрать функцию автономного глушения из спецификации LTE Rel. 9. Однако такое предложение оставляет без внимания те сценарии, для которых было показано, что требуется глушение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном или более вариантах осуществления настоящее изобретение определяет схему глушения для передачи опорного сигнала (RS) как комбинацию последовательности глушения и опорной точки. Моменты глушения - также называемые событиями глушения - для данной соты таким образом могут отличаться от другой соты при помощи использования другой последовательности глушения, другой опорной точки, или обоих. Кроме этого в одном или более вариантах осуществления настоящее изобретение предусматривает использование общей последовательности глушения или опорной точки для всех сот, причем события глушения различаются между сотами путем использования различных опорных точек (в случае общей последовательности глушения) или путем использования различных последовательностей глушения (в случае общей опорной точки). Такие меры упрощают сигнализацию, необходимую для того, чтобы управлять или определять схему глушения, использующуюся в интересующей соте, обеспечивают преимущественную основу для распространения схем глушения среди сот, исключают необходимость в предварительно определенных схемах глушения и необходимость последовательного обнаружения глушения со стороны UE или других приемников.
К тому же один или более вариант осуществления настоящего изобретения обеспечивают ряд альтернативных решений для определения опорных точек и обеспечивают способ для преобразования между различными схемами глушения, например, путем сдвига основной последовательности глушения различным образом в каждой из нескольких сот таким образом, что каждая сота использует различно-сдвинутую версию основной последовательности. К тому же еще один или более вариант осуществления настоящего изобретения предусматривают учетную запись сигнализации между различными типами узлов сети для того, чтобы предоставить возможность обмена и оптимизации схем глушения.
В соответствии с этим, в одном или более вариантах осуществления настоящее изобретение предоставляет в беспроводном устройстве связи способ определения времени, когда периодически передаваемые опорные сигналы глушатся в соте беспроводной сети связи. Устройство также включает в себя контроллер, оперативно связанный с приемником. Контроллер выполнен с возможностью определять периодическую последовательность глушения, определяющую алгоритм глушения, использующийся для глушения опорных сигналов в соте, и определять опорную точку, относящую периодический алгоритм глушения к определенному опорному времени. Контроллер также выполнен с возможностью определять, когда опорные сигналы глушатся в соте в соответствии с периодической последовательностью глушения и опорной точкой.
В другом варианте осуществления способ осуществлен в базовой станции, которая выполнена с возможностью для использования в беспроводной сети связи. Способ включает в себя определение схемы глушения для соты, управляемой базовой станцией, где схема глушения определяется, по меньшей мере, частично последовательностью глушения, включающей в себя алгоритм для глушения опорных сигналов, периодически передаваемых для соты. Также способ включает в себя глушения опорных сигналов для соты в соответствии со схемой глушения.
В одном конкретном варианте осуществления «определение» схемы глушения на базовой станции включает в себя принятие решения базовой станцией о схеме глушения, и такое принятие решения может осуществляться единолично базовой станцией или через OAM, или совместно по одной или более из соседних сот (например, на основе взаимодействия с одной или более из других базовых станций, управляющих одной или более из соседних сот). В таком варианте осуществления способ также может включать в себя отправление базовой станцией сигнализации на узел определения местоположения или другой узел в пределах сети, определяющей схему глушения, решение о котором принято базовой станцией. Альтернативным образом «определение» схемы глушения на базовой станции включает в себя прием сигнализации, определяющей решение о схеме глушения, принятое для соты другим узлом в сети, таким как узел определения местоположения или узел функционирования и технического обслуживания.
В соответствии со способом базовой станции, далее в данном документе идея раскрывает базовую станцию, которая включает в себя интерфейс радиосвязи, выполненный с возможностью осуществлять передачу сигналов, включая в себя опорные сигналы (для каждой соты, управляемой базовой станцией). Также базовая станция включает в себя контроллер, оперативно связанный с интерфейсом радиосвязи. В частности, контроллер выполнен с возможностью определять схему глушения для соты, управляемой базовой станцией, причем указанная схема глушения определяется, по меньшей мере, частично при помощи последовательности глушения, включающей в себя алгоритм для глушения опорных сигналов, периодически передаваемых для соты, и глушит опорные сигналы для соты в соответствии со схемой глушения. Опять же базовая станция может «определять» схему глушения на основе приема сигнализации от другого узла, определяющей схему глушения, о которой принято решение, для соты, или базовая станция может «определить» схему глушения на основе ее принятии решения о схеме глушения (для соты на индивидуальной основе или для соты на совместной основе, например, совместном принятии решения о схеме глушения для соты как для одной среди набора соседних сот).
Во все еще другом варианте осуществления идея, представленная в данном документе, раскрывает способ в узле определения местоположения, который выполнен с возможностью для функционирования в беспроводной сети связи. Способ включает в себя определение схемы глушения для каждой из одной или более сот беспроводной сети связи, в которой схемы глушения одной или более сот управляют временем, когда глушение применяется к опорным сигналам, периодически передаваемым в каждую одну или более сот. Способ также включает в себя генерирование ассистирующих данных для одного или более пользовательского оборудования, причем указанные ассистирующие данные определяют схемы глушения одной или более сот, и передачу сигналов с ассистирующими данными одному или более пользовательскому оборудованию.
В одном варианте осуществления в способе определения местоположения узла «определение» схемы глушения для каждой из одной или более сот включает в себя принятие решения узлом определения местоположения о схеме глушения, которая будет использоваться для каждой из одной или более сот. Например, узел определения местоположения может принять решение о схеме глушения совместно для данных групп или наборов соседних сот таким образом, чтобы схема глушения каждой соты дополняла (в терминах алгоритм/время) схему глушения соседней соты. В любом случае варианты осуществления, в которых узел определения местоположения является принимающим решение о том, что касается схем глушения, способ также включает в себя отправку узлом определения местоположения управляющей сигнализации базовой(ым) станции(ям), связанным с одной или более сот, для которых узел определения местоположения принял решение о схемах глушения. Такая управляющая сигнализация заставляет базовую(ые) станцию(и) принять схемы глушения, как это решено узлом определения местоположения.
В альтернативном варианте осуществления базовые станции (или другой узел, такой как узел эксплуатации и технического обслуживания) принимают решение о схеме глушения для сот, и в таких случаях узел определения местоположения «определяет» схему глушения сот на основе приема сигнализации, которая определяет те схемы. Например, каждая базовая станция отправляет сигнал узлу определения местоположения о схеме глушения каждой соты под управлением базовой станции.
В варианте осуществления, соответствующем способу определения местоположения узла, идея в данном документе обеспечивает узел определения местоположения, который выполнен с возможностью функционирования в беспроводной сети связи. Узел определения местонахождения включает в себя одну или более электронных схем обработки, которые выполнены с возможностью определять схему глушения для каждой из одной или более сот беспроводной сети связи. Как объяснено выше, схемы глушения одной или более сот управляют временем, когда глушение применяется к опорным сигналам, периодически передаваемым в каждую одну или более сот, и «определение» содержит принятие решения о схемах глушения на узле определения местоположения, или прием сигнализации, определяющей схемы глушения, о которых принято решение другим узлом или узлами в сети.
Электронные схемы обработки также выполнены с возможностью генерировать ассистирующие данные для одного или более пользовательского оборудования (UE), причем ассистирующие данные определяют схемы глушения одной или более сот. Соответственно, узел определения местоположения включает в себя интерфейс взаимодействия, оперативно связанный с одной или более электронными схемами обработки, где интерфейс взаимодействия выполнен с возможностью передавать сигнал с ассистирующими данными одному или более пользовательскому оборудования. Как пример, такая сигнализация создает сигнализацию протокола определения местоположения более высокого уровня, которая передается, например, прозрачно через один или более узлов, например, вовлеченные базовые станции и MME, для приема со стороны UE.
Следует отметить, что один или более вариантов осуществления способа определения местоположения узла и аппаратура узла, рассматриваемые в данном документе, выполнены с возможностью обеспечивать распространение схемы глушения, в которых узел определения местоположения определяет последовательность глушения для одной соты путем циклического сдвига данной последовательности глушения на определенную величину. Например, данная последовательность глушения может включать в себя основную последовательность, имеющую опорную точку, определенную в соответствии с синхронизацией в опорной соте. Как пример, синхронизация может представлять собой синхронизацию передачи кадров или подкадров). Узел определения местоположения «распространяет» эту данную последовательность глушения (т.е. время синхронизирует ее с периодическими передачами опорных сигналов в другой соте на основе опорной точки и синхронизации другой соты). В целом, узел определения местоположения выполнен с возможностью работать со специализированными сотовыми последовательностями глушения и опорными точками или специализированными сотовыми опорными точками и общей последовательностью глушения, или специализированными сотовыми последовательностями глушения и общей опорной точкой.
Однако во всех вышеприведенных вариантах осуществлениях количество переданных сигналов, требующихся для того, чтобы передать конкретную схему глушения, использующуюся в данной соте, значительно уменьшено. Это означает, что схема глушения данной соты определяется последовательностью глушения и опорной точкой, и требуется относительно малое количество битов для идентификации опорной точки и/или последовательности глушения. Хотя в одном или более вариантах осуществления UE могут быть предварительно сконфигурированы с набором возможных последовательностей глушения и/или опорных точек, и сигнализация о том, какая последовательность глушения и/или опорная точка применяется к данной соте, может осуществляться путем передачи табличных индексов или подобным образом. Альтернативным образом, вместо того, чтобы предварительно конфигурировать UE, такие таблицы могут быть переданы каждому UE на этапе вызова или в другое подходящее время.
Конечно, настоящее изобретение не является ограниченным вышеуказанным кратким описанием признаков и преимуществ. Описанные варианты осуществления, включая перенастройку алгоритмов общей опорной точки, выполненную некоторым узлом, или распространение последовательности глушения в определенный момент времени, могут также выбираться для других задач, нежели определение местоположения, например, когда действия по сотовой передаче или глушение управляются при помощи алгоритмов передачи, и когда действия по передаче или глушение не обязательно ограничиваются опорными сигналами. Примеры других сигналов представляют собой сигналы или каналы, содержащие данные, например, Физический нисходящий канал для совместного использования (PDSCH) в LTE.
Также принципы и способы, раскрытые в данном документе, не ограничиваются LTE и могут прекрасно быть адаптированы в сетях, использующих одну или более других технологий радиодоступа.
Беспроводное UE, описанное в данном документе, может представлять собой любое устройство, для которого определяется местоположение, например, беспроводное оконечное устройство, переносной компьютер, малая RBS, сенсорное устройство или устройство радиомаяка.
Дополнительно, хотя изобретение описано для радиоузлов, называемых eNodeB, радиоузлы в вариантах осуществления изобретения могут представлять собой любой радиоузел, например макро-базовую станцию, микро-базовую станцию, ретранслятор, устройство радиомаяка, или даже беспроводное оконечное устройство с соответствующими функциональными возможностями в сетях связи между мобильными объектами. Узел определения местоположения, описанный в изобретении как E-SMLC, может представлять собой любой узел с функциональными возможностями определения местоположения, например, E-SMLC, Локационная платформа SUPL (SLP)в самолете пользователя, или даже беспроводное оконечное устройство с соответствующими функциональными возможностями в сетях связи между мобильными объектами.
Средние специалисты в данной области техники обнаружат дополнительные признаки и преимущества после прочтения следующего подробного описания и после просмотра сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схему подхода к временному распределению подкадров как подкадров событий определения местоположения, для передачи опорного сигнала определения местоположения (PRS) в данной соте.
Фиг. 2 представляет собой блок-схему одного варианта осуществления беспроводной сети связи, которая сконфигурирована в соответствии с настоящим изобретением.
Фиг. 3 представляет собой блок-схему, иллюстрирующую примерные варианты осуществления базовой станции, узел управления конфигурацией опорного сигнала и пользовательское оборудование, какое будет использоваться в сети, проиллюстрированной на Фиг. 2.
Фиг. 4 представляет собой логическую блок-схему последовательности операций, иллюстрирующую один вариант осуществления способа, реализованного в пользовательском оборудовании или другом устройстве беспроводной связи, для определения схемы глушения, использующейся для того, чтобы глушить передачи опорного сигнала в данной сетевой соте.
Фиг. 5 представляет собой логическую блок-схему последовательности операций, иллюстрирующую один вариант осуществления способа, реализованного в базовой станции, для определения схемы глушения, которая должна использоваться для глушения передач опорного сигнала базовой станцией.
Фиг. 6-8 представляют собой логические блок-схемы последовательности операций, иллюстрирующие варианты осуществления способов, реализованных в сетевом узле, таком как узле определения местоположения, для определения схемы глушения, которая должна использоваться для глушения передач опорного сигнала данной базовой станцией или множеством базовых станций.
Фиг. 9 представляет собой схему, иллюстрирующую один вариант осуществления основной последовательности, такой, которая могла бы использоваться для того, чтобы определять последовательность глушения в соответствии с настоящим изобретением.
Фиг. 10 представляет собой схему, иллюстрирующую варианты основной последовательности со сдвигом с Фиг. 9, в которой варианты со сдвигом функционируют как уникальные последовательности глушения для определения различных схем глушения в различных сотах беспроводной сети связи.
Фиг. 11 и 12 представляют собой примеры, иллюстрирующие распространение последовательности глушения.
Фиг. 13 представляет собой таблицу, иллюстрирующую различные комбинации уникальных или типовых опорных точек с уникальными или типовыми последовательностями глушения как основа для определения различных схем глушения в различных сотах беспроводной сети связи.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 2 отображает пример беспроводной сети 10 связи, которая может находиться в сети LTE. Примерная сеть 10 включает в себя сеть 12 радиодоступа (RAN), которая взаимосвязанно соединяет пользовательское оборудование 14 (UE) с опорной сетью 16 (CN), которая в свою очередь соединяет UE 14 друг с другом и/или с оборудованием в других внешних сетях.
RAN 12 включает в себя несколько базовых станций 18, каждая из которых управляет и предоставляет радио услуги в одной или более «сот» 20. В то время как Фиг. 2 отображает взаимно однозначную взаимосвязь между базовыми станциями 18 и сотами 20, специалисты в данной области техники поймут, что одна базовая станция 18, например, eNodeB в реализации LTE сети 10, могла являться выполненной с возможностью управлять более чем одной сотой 20 в сети 10.
Из Фиг. 2 также можно увидеть примерные объекты в пределах CN 16. Здесь примерные объекты включают в себя обслуживающий шлюзовой (SGW) узел 22, который обеспечивает маршрутизацию и другие функции связи, присоединение множества UE 14 к другому оборудованию и/или сетям. CN 16 также включает в себя контроллер 24 конфигурации опорного сигнала (RS CFG. CONTROLLER), который может представлять собой узел определения местоположения, такой как E-SMLC или SLP, или другой сетевой узел, например, узлы O&M или SON. В то время как он называется «контроллер», узел 24 может и не управлять схемами глушения, использующимися базовой станцией 18, или, по меньшей мере, не управлять всеми элементами таких схем, но все же может действовать, как централизованный узел для приема информации о схеме глушения от базовых станций 18 и для распределения, по меньшей мере, части той информации между множеством UE 14 (и любым другим радиооборудованием, получающим RS от базовых станций 18) через сигнализацию более высокого уровня, которая может распространяться через одну или более базовые станции 18.
Например, в одном варианте осуществления базовые станции 18, индивидуально или совместно друг с другом, принимают решение о схемах глушения для собственных сот и сигнализируют об этих решениях узлу 24 (который, например, представляет собой узел определения местоположения или узел эксплуатации и технического обслуживания). С этой целью базовые станции 18 могут включать в себя тип контроллера 25 опорных сигналов, который выполнен с возможностью принимать решение о схеме(ах) глушения. В других вариантах осуществления узел 24 является принимающим решение о схемах глушения для сот 20, и он посылает управляющую сигнализацию базовым станциям 18 для того, чтобы обозначить те решения о схеме глушения.
Фиг. 3 иллюстрирует соответствующие примерные реализации UE 14, базовых станций 18 и узла 24. Специалистам в данной области техники следует учесть, что эти объекты могут включать в себя компьютерные электронные схемы, такие как одна или более схем на основе микропроцессоров, цифровых устройств обработки сигналов, множество ASIC, множество FPGA или других программируемых или запрограммированных цифровых обрабатывающих электронных схем. В связи с этим один или более аспектов функционирования проиллюстрированных объектов могут реализовываться путем конфигурирования объекта через посредство выполнения сохраненных компьютерных программ, содержащиеся в памяти или другой машинно-читаемой среде в самом объекте, или будучи доступными объекту. В связи с этим различные проиллюстрированные электронные схемы могут реализовываться в аппаратном виде, программном виде или в комбинации обоих.
Имея это ввиду, первая примерная базовая станция 18-1 содержит интерфейс 30 радиосвязи, который выполнен с возможностью передавать опорные сигналы от базовой станции 18-1 в соответствии с определенным опорным временем для данной соты 20, которая управляется базовой станцией 18-1. В этой связи станет понятно, что данный тип опорного сигнала, например, опорный сигнал определения местоположения, может быть передан в данную соту 20 на периодической основе, и что эти повторяющиеся передачи опорных сигналов могут глушиться в соответствии с определенными алгоритмами. Применение того алгоритма к периодическим передачам опорного сигнала таким образом может быть привязано к определенному опорному времени, которое предоставляется как опорная или логическая начальная точка для алгоритма глушения в отношении периодичности опорного сигнала. В более широком смысле связной интерфейс 30, например, сотовый связной интерфейс, поддерживает нисходящую и восходящую сигнализацию со множеством UE 14.
Базовая станция 18-1 также включает в себя одну или более обрабатывающих электронных схем 32, которые, по меньшей мере, функционально включают в себя контроллер 34 передачи опорных сигналов, называемый для удобства как «контроллер 34». Контроллер 34 выполнен с возможностью определять события глушения, во время которых базовая станция 18-1 должна глушить свою передачу опорных сигналов для данной соты 20 на основе того, что она была сконфигурирована, чтобы: определять последовательность глушения, которая определяет алгоритм синхронизации по отношению к периодичности передачи опорных сигналов, где указанная последовательность глушения должна применяться базовой станцией 18-1, для глушения ее повторяющейся передачи опорных сигналов в данной соте 20; определять опорную точку, относя периодический алгоритм глушения к определенному опорному времени; и управлять указанным интерфейсом 30 радиосвязи, для того, чтобы глушить передачу опорных сигналов для данной соты 20.
Еще также базовая станция 18-1 включает в себя один или более связных интерфейсов 36 для взаимодействия с узлом другой сети в сети 10, например, с узлом 24 в CN 16. По меньшей мере, в одном таком варианте осуществления контроллер 34 выполнен с возможностью отправлять сигнал о схеме глушения базовой станции 18-1 для данной соты 20 другому сетевому узлу, в котором схема глушения определяет, по меньшей мере, одну из опорных точек и последовательность глушения для данной соты. Например, базовая станция 18-1 может определить свою схему глушения и отправить эту схему сетевому узлу 24 через посредство связного интерфейса 36. По меньшей мере, в одном таком варианте осуществления контроллер 34 выполнен с возможностью определять события глушения, которые должны использоваться им для соты 20 путем определения последовательности глушения или опорной точки или обоих, во взаимодействии с другой базовой станцией (например, базовой станцией 18-2) на основе обмена сигнализацией с другой базовой станцией. Каждая из базовых станций 18-1 и 18-2 включает в себя интерфейсные электронные схемы, поддерживающие интерфейс 38 базовой станции, для обмена такой сигнализацией - например, в варианте осуществления LTE обмен такой информацией производится между множеством eNodeB через интерфейс X2.
По меньшей мере, в одном варианте осуществления, где контроллер 34 принимает решение о всех или о части схемы глушения, используемой базовой станцией 18-1, контроллер 34 выполнен с возможностью определять последовательность глушения путем извлечения последовательности глушения со сдвигом из основной последовательности глушения в соответствии с информацией, обозначающей, что должен использоваться циклический сдвиг для извлечения последовательности глушения со сдвигом. Информация, обозначающая циклический сдвиг, может приниматься от другого узла в сети 10, например, от узла 24, или может определяться совместно среди базовых станций 18 или может предварительно определяться сотами, будучи одинаковой или различной. В любом случае нужно понимать, что любая данная базовая станция 18 «определяет» свою схему глушения целиком и частично на основе принятия своих собственных решений о том, какие последовательности глушения и опорные точки использовать для определения своих событий глушения (где эти решения могут приниматься совместно с другой базовой станцией 18), или «определяет» свою схему глушения целиком или частично на основе приема управляющей сигнализации от другого объекта (например, узла 24 и/или другой базовой станции 18). (Следует отметить два примерных случая: один, где BS направляет определенную схему глушения узлу определения местонахождения, и один, где BS направляет определенную схему глушения цели определения местонахождения (например, UE).
В случае, где другой узел в сети 10 принимает решение целиком или частично о схеме глушения, которая должна использоваться любой базовой станцией 18, тот узел отправляет (непосредственно или опосредованно) соответствующую управляющую сигнализацию базовой станции 18-1. Например, опорные сигналы, переданные от базовых станций 18-1, 18-2 и т.д., содержат множество PRS для того, чтобы дать возможность того, чтобы измерения, относящиеся к определению местоположения, были сделаны беспроводным устройством связи, функционирующим в данной соте 20 или функционирующим в соседней соте. По меньшей мере, в одном таком варианте осуществления контроллер 34 выполнен с возможностью определять моменты времени, когда опорные сигналы глушатся («события глушения») путем определения последовательности глушения или опорной точки, или обоих на основе сигнализации, принятой от узла 24 или от другого узла в сети 10.
Таким образом, Фиг. 3 предоставляет примерные подробности для узла 24. Как отмечалось, узел 24 может представлять собой E-SMLC или другой узел определения местоположения, выполненный с возможностью функционирования в сети 10. Как было проиллюстрировано, узел 24 включает в себя один или более телекоммуникационный интерфейс 40 для взаимодействия, по меньшей мере, одной базовой станцией 18 и одним или более радиоприемниками, которые принимают опорные сигналы от указанной базовой станции, например, одного или более UE 14. В указанном качестве телекоммуникационный(ые) интерфейс(ы) 40 будут восприниматься как электронные схемы и устройства обработки протоколов, для сигнализации базовым станциям 18 и/или для генерирования сигнализации более высокого уровня, которая передается через базовые станции 18, но направлены множеству UE 14 или другим радиоприемникам, которым требуется информация о схеме глушения, для измерения опорных сигналов от базовых станций 18.
Узел 24 также включает в себя одну или более электронных схем 42 обработки - например, цифровые электронные схемы обработки - которые выполнены с возможностью определять схему глушения для базовой станции 18. Схема глушения устанавливает события глушения, во время которых базовая станция 18 должна глушить свою передачу опорных сигналов. В соответствии с идеями в данном документе, схема глушения включает в себя информацию, обозначающую, по меньшей мере, одну последовательность глушения, которая обозначает алгоритм синхронизации относительно периодичности передачи опорных сигналов, в котором последовательность глушения должна применяться базовой станцией 18, для глушения своей повторяющейся передачи опорных сигналов; и опорную точку, которая обозначает логический начальный период последовательности глушения, относительно определенного опорного времени. (Следует понимать, что данная базовая станция 18 может отвечать за несколько сот и может использовать различные схемы глушения между такими сотами).
Электронная(ые) схема(ы) 42 обработки также выполнены с возможностью посылать информацию о схеме глушения базовой станции 18 или радиооборудованию, принимающему опорные сигналы от базовой станции 18, в соответствии со схемой глушения. Это означает, что в «определении» схемы глушения базовой станции 18 узел 24 может представлять собой объект, который принимает решение целиком или частично о той схеме глушения, и таким образом, посылает соответствующую управляющую сигнализацию базовой станции 18. В таких вариантах осуществления узел 24 также может посылать сигнализацию более высокого уровня множеству UE 14 для того, чтобы обозначить целиком или частично схему глушения, о которой принято решения для базовой станции 18, но следует отметить, что базовая станция 18 также может передавать некоторую информацию о схеме глушения множеству UE 14 через сигнализацию более низкого уровня.
В случаях, где базовая станция 18 или другой узел в сети принимает решение о схеме глушения, которая должна использоваться базовой станцией 18, узел 24 «определяет» схему глушения базовой станции 18 на основе приема сигнализации от базовой станции 18 или от другого узла, где эта сигнализация обозначает последовательность глушения и опорную точку. Таким образом, по меньшей мере, в одном варианте осуществления узел 24 выполнен с возможностью определять схему глушения для базовой станции 18 на основе приема сигнализации от базовой станции 18, которая обозначает целиком или частично схему глушения базовой станции. Специалисты в данной области техники поймут, что узел 24 может принимать сигнализацию о схеме глушения от множества базовых станций 18.
Также в вариантах осуществления, где узел 24 выполнен с возможностью определять скоординированные схемы глушения для множества базовых станций 18, «скоординированные схемы глушения» могут представлять собой опорные точки, которые взаимосвязаны между базовыми станциями 18, или могут представлять собой последовательности глушения, которые взаимосвязаны между базовыми станциями 18, или оба варианта.
По меньшей мере, в одном таком варианте осуществления узел 24 выполнен с возможностью определять взаимосвязанные схемы глушения для множества базовых станций 18 на основе дачи указания различным базовым станциям 18 в множестве базовых станций 18 использовать различные последовательности глушения, или различные опорные точки, или различные последовательности глушения и различные опорные точки. В одном примерном варианте осуществления узел 24 выполнен с возможностью давать указание различным базовым станциям 18 использовать различные последовательности глушения путем дачи указания различным базовым станциям 18 применять различные циклические сдвиги к основной последовательности, для того, чтобы таким образом извлечь для каждой такой базовой станции 18 версию с различным сдвигом общей основной последовательности.
Фиг. 3 также иллюстрирует примерный вариант осуществления UE 14, но специалисты в данной области техники признают, что чертежи и идеи в данном документе являются во многом применимыми к широкому диапазону беспроводных сетевых устройств. Проиллюстрированное UE 14 выполнено с возможностью измерять опорные сигналы, передаваемые сетевым передатчиком (например, данной базовой станцией 18) для данной соты 20 в сети 10.
Соответственно, UE 14 включает в себя: приемник, выполненный с возможностью принимать сигналы, передаваемые сетью 10 для данной соты 20, включая указанные опорные сигналы. Здесь приемник включен в проиллюстрированный интерфейс 50 радиосвязи, который включает в себя сотовый приемопередатчик/модем в одном или более вариантах осуществления, включающих в себя приемник для приема нисходящих передач от сети 10 и передатчик для передачи восходящих передач в сеть 10. Для удобства приемник называется «приемник 50» для того, чтобы обозначить, что он является частью интерфейса 50 радиосвязи.
Также UE 14 включает в себя одну или более электронных схем 52 обработки, например, цифровую схему обработки, которая включает в себя измерительную схему 54, которая выполнена с возможностью измерять опорные сигналы (например, синхронизацию, качество и т.д.) и измеритель RS, и обрабатывающий контроллер 56 («контроллер 56»), которые оперативно связаны с приемником 50 и измерительной схемой 54. Контроллер 56 выполнен с возможностью определять последовательность глушения, которая обозначает алгоритм глушения, применяемый сетевым передатчиком в передачах опорных сигналов; определять опорную точку, которая обозначает опорную синхронизацию для последовательности глушения, применяемую сетевым передатчиком; определять события глушения, в момент которых сетевой передатчик глушит свои передачи опорных сигналов на основе указанной последовательности глушения и указанной опорной точки; и управлять измерительной схемой 54 для того, чтобы производить измерение опорных сигналов от сетевого передатчика в соответствии с указанными событиями глушения таким образом, что измерительная схема 54 не измеряет опорные сигналы для данной соты 20 в течение указанных событий глушения. По меньшей мере, в одном варианте осуществления UE выполнен с возможностью приобретать схему глушения из принятой сигнализации, например, из ассистирующих данных, принятых поверх LPP от E-SMLC.
В одном или более вариантах осуществления контроллер 56 выполнен с возможностью определять опорную точку в соответствии с одним или набором предварительно определенных значений системного номера кадра (SFN). Эти значения могут являться предварительно определенными и, таким образом, могут являться предварительно сохраненными в памяти в UE 14 и/или переданными UE 14 сетью 10.
Также в одном или более вариантах осуществления контроллер 56 выполнен с возможностью использовать или последовательность глушения, или опорную точку в качестве общего значения для определения событий глушения для одной или более соседних сот 20, и управлять измерением опорных сигналов от каждой такой соседней соты 20 в соответствии с соответствующими событиями глушения, определенными для соседних сот 20.
Также в одном или более вариантах осуществления контроллер 56 выполнен с возможностью принимать через приемник 50 ассистирующие данные от сети 10, которые обозначают, что опорная точка является общей для нескольких сот 20, идентифицированных в ассистирующих данных, включая данную соту 20, и в котором опорная точка включает в себя общую опорную точку для нескольких сот 20, в то время как каждая такая сота 20 использует уникальную последовательность глушения, которая передана в ассистирующих данных. Например, все соты 20-1, 20-2 и 20-3 используют общую опорную точку, но каждая использует различную последовательность глушения.
Более широко, по меньшей мере, в одном варианте осуществления контроллер 56 выполнен с возможностью определять одно или оба из последовательности глушения и опорной точки на основе получения UE 14 сигнализации от передатчика (например, базовой станции 10) или от другого узла в беспроводной сети связи, такого как узел 24. Дополнительно или альтернативно контроллер 56 выполнен с возможностью определять одно или оба из последовательности глушения и опорной точки на основе прочтения предварительно определенной информации из памяти в пределах UE 14 - например, из энергонезависимой памяти в пределах UE 14.
Также, по меньшей мере, в одном варианте осуществления опорные сигналы представляют собой опорные сигналы определения местоположения (PRS), которые передаются в соответствии с известной периодичностью, подлежат глушению в момент указанных событий глушения, и контроллер 56 выполнен с возможностью определять последовательность глушения, находящей в использовании данной базовой станции 18 для данной соты 20 путем определения последовательности индикаторов или значений индексов, которые обозначают алгоритм глушения, относящийся к указанной известной периодичности.
Также еще, по меньшей мере, в одном варианте осуществления контроллер 56 выполнен с возможностью определять последовательность глушения для данной соты 20 на основе приема UE 14 сигнализации, обозначающей циклический сдвиг, который применяется передатчиком соты к основной последовательности глушения, и определения последовательности со сдвигом, использующейся передатчиком для данной соты 20 на основе осуществления сдвига в основной последовательности глушения в соответствии с обозначенным циклическим сдвигом. Это означает, что основная последовательность является заранее известной для UE 14, или переданной ему, и UE 14 определяет последовательность со сдвигом фактически во время использования для конкретной соты 20 на основе приема сигнализации, обозначающей сдвиг, относящийся к основной последовательности, таким образом, что та версия основной последовательности со сдвигом может определяться UE 14.
Если иметь в виду вышеуказанное, то Фиг. 4 иллюстрирует один вариант осуществления способа 400, осуществленного UE 14 или, по существу, любым другим устройством беспроводной связи. Способ 400 направлен на определение того, когда опорные сигналы глушатся в данной соте 20 сети 10. Способ включает в себя определение периодической последовательности глушения, обозначающей алгоритм глушения, используемый для глушения указанных опорных сигналов в соте 20 сети 10 (Блок 402), и определение опорной точки, относя периодический алгоритм глушения к определенному опорному времени (Блок 404). Способ также включает в себя определение того, когда опорные сигналы глушатся в соте 20 в соответствии с периодической последовательностью глушения и опорной точкой (Блок 406).
Способ (400) может также включать в себя измерения управляющих опорных сигналов в соответствии с определенными моментами времени глушения (Блок 408). Например, UE 14 не предпринимает попыток измерить опорные сигналы для соты 20 в те моменты времени, когда оно определило, что те сигналы заглушены. Конечно, будет понятным, что UE 14 может проводить измерения опорного сигнала для соты 20, которая не является заглушенной, в то же время избегая таких измерений для другой соты 20, которая является заглушенной.
Фиг. 5 иллюстрирует соответствующий способ 500 для базовой станции, такой, который может быть реализован одной или более из базовых станций 18, проиллюстрированных, например, на Фиг. 2 и 3. Способ 500 включает в себя определение схемы глушения для соты 20, управляемой базовой станцией 18 (Блок 502). В данном случае схема глушения соты 20 определяется, по меньшей мере, частично последовательность глушения, включающей в себя алгоритм для глушения опорных сигналов, периодически передаваемых для соты 20. Как отмечалось, базовая станция 18 может определять или последовательность глушения или опорную точку, или оба на основе принятия своих собственных решений или на основе взаимодействия с одной или более других базовых станций 18 или на основе приема управляющей сигнализации от узла 24 или другого узла в сети 10, который принял решение о том, какая схема глушения будет использоваться базовой станцией 18.
В любом случае способ включает в себя глушение опорных сигналов для соты 20 в соответствии со схемой глушения (Блок 504). Примерные подробности для действий обработки, содержащих Блок 504, включают в себя определение того, настало ли время (в общем) осуществлять передачу опорных сигналов в соответствии со сконфигурированной периодичностью (Блок 504A). Если нет, то передача опорного сигнала пропускается (Блок 504D). Если это так, то передатчик определяет, применяется ли глушение к конкретной передаче опорного сигнала (Блок 504B). Другими словами, должен ли передатчик осуществлять передачу опорных сигналов или глушить их (что может быть понято как передача с нулевой мощностью или низкой мощностью). Если эта передача опорного сигнала представляет собой событие глушения, тогда передатчик глушит опорные сигналы (Блок 504D). Если это не является событием глушения, тогда передатчик осуществляет передачу опорных сигналов (Блок 504C).
Обращаясь к Фиг. 6, можно увидеть один вариант осуществления способа 600 такой, который может реализовываться в узле 24, проиллюстрированном, например, на Фиг. 2 и 3. В данном случае способ 600 начинается с определения узлом 24 схем глушения одной или более сот 18, где схема глушения определяется при помощи последовательности глушения и опорной точки (Блок 602). Способ продолжается генерированием узлом 24 ассистирующих данных для одного или более UE 14, в котором ассистирующие данные обозначают схемы глушения одной или более сот 20 (Блок 604). Способ продолжается передачей (606) ассистирующих данных одному или более пользовательскому оборудованию (14).
В одном варианте осуществления базовая(ые) станция(и), связанная(ые) с одной или более сот 20, принимают решение о схемах глушения сот(ы) 20, и «определение» схем глушения сот узлом 24 включает в себя прием сигнализации узлом 24, например, от базовых станций 18, обозначающей схемы глушения, как было решено базовой станцией 18. В другом варианте осуществления узел 24 «определяет» схемы глушения одной или более сот 20 на основе того, что узел 24 является объектом, который принимает решение о схемах глушения - в этой связи, он может принять решение о схеме глушения для каждой соты 20 по отдельности или он может произвести объединенное определение (например, взаимосвязанных) схем глушения для всей группы соседних сот 20.
По меньшей мере, в одном варианте осуществления способа 600 узел 24 выполнен с возможностью определять схемы глушения для одной и более базовых станций 18 из сигнализации, принятой от тех одной или более базовых станций 18, обозначающей схемы глушения. По меньшей мере, в одном таком варианте осуществления узел 24 принимает сигнализацию, обозначающую первую схему глушения для первой соты 20, и извлекает вторую схему глушения для второй соты 20, т.е. он извлекает вторую схему глушения относительно второй соты 20. Узел 24 осуществляет извлечение на основе разницы синхронизации передач между первой и второй сотами 20. В частности, извлечение второй схемы глушения включает в себя сдвигание последовательности глушения первой схемы глушения на величину, зависящую от разницы синхронизации передач, для того, чтобы получить последовательность со сдвигом, которая должна использоваться в качестве последовательности глушения второй схемы глушения. В данном случае станет понятно, что «последовательность глушения» данной схемы глушения обозначает алгоритм глушения, применяемы к периодическим передачам опорных сигналов для соответствующей соты 20.
В более общем случае один или более узлов, обсужденных в данном документе, может быть выполнен с возможностью преобразовывать алгоритмы глушения в отношении общей опорной точки. Следует пояснить, что опорная сота 20 может различаться для различных UE 14, и что поэтому осуществление преобразования может потребоваться для каждого UE и для каждой опорной соты. В последнем случае осуществление преобразования может использоваться повторно для множества UE, имеющего одинаковые опорные соты. Если преобразующий узел представляет собой узел 24 или базовую станцию 18 или UE 14, то будет понятно, что преобразующему узлу в общем случае может потребоваться, чтобы он был проинформирован, непосредственно или опосредованно, об опорных точках алгоритмов глушения, которые подлежат преобразованию, и о соте, применительно к которой алгоритмы преобразуются. Следует также отметить, что первоначальные и преобразованные последовательности описывали глушение одних и тех же RS, просто различными способами, так что осуществлением установки не оказывается влияние на передачи/глушение RS.
Фиг. 7 иллюстрирует способ 700 совместного (взаимодействующего) определения, который реализуется, например, в узле 24. Здесь узел 24 идентифицирует множество сот 20 (Блок 702), например, узел 24 может быть снабжен, или в ином случает принять информацию со списком соседних сот или другую информацию, обозначающую связанные подгруппы сот 20. Способ продолжается определением узлом 24 скоординированного набора схем глушения для множества сот 20 (Блок 704). Здесь «скоординированный» подразумевает взаимосвязанное определение схем глушения по всему множеству сот 20, например, общая последовательность глушения и уникальные опорные точки, или наоборот, или уникальные комбинации последовательности глушения и опорных точек для всего множества сот 20. Способ также включает в себя отправление сигнализации, обозначающей определенные схемы глушения (Блок 706). Такая сигнализация может являться двоякой: например, управляющей сигнализацией задействованным базовым станциям 18 для того, чтобы информировать их о схемах глушения, о которых принято решение для сот 20, и передачей ассистирующих данных множеству UE 14, которые могут прозрачно передаваться через базовые станции 18 множеству UE 14.
В данном документе предполагается, что в качестве альтернативы данная базовая станция 18 может функционировать как ведущая базовая станция для совместного определения схем глушения для нескольких сот 20, даже там, где одна или более из тех сот 20 управляются одной или более другими базовыми станциями 18. Также несколько базовых станций 18 взаимодействуют для того, чтобы координировать принятие решений о схеме глушения, сделанное для группы сот 20, где каждая такая базовая станция 18 управляет одной или более сотами 20 в той группе.
Фиг. 8 отображает родственный сценарий, в котором способ 800 реализуется на узле 24, и в котором подразумевается, что базовая станция 18 принимает решение о схеме глушения сот, а не узел 24. По существу проиллюстрированная обработка начинается с определения узлом 24 схемы глушения одной или более сот 20 на основе принятой сигнализации от задействованных базовых станций 18 (Блок 802), где та сигнализация обозначает схемы глушения задействованных сот 20. Например, сигнализация включает в себя сообщения, которые включают в себя поля или другие такие информационные элементы, которые идентифицируют последовательность глушения и/или опорную точку, которые должны использоваться каждой сотой 20.
Способ 800 продолжается отправлением узлом 24 сигнализации более высокого уровня радиоприемникам, которые осуществляют или будут осуществлять измерения опорных сигналов для задействованных сот 20 (Блок 804). Например, узел 24 посылает сигнализацию более высокого уровня UE 14, функционирующего в сотах 20, управляемых базовой станцией 18, или функционирующего в прилежащих сотах 20. Этот аспект функционирования является преимущественным в смысле того, что базовая станция 18 принимает решение о схеме глушения, которая должна использоваться, но узел 24, по-прежнему, может действовать как централизованное хранилище для приема той информации и распространения всей или, по меньшей мере, части той информации (через сигнализацию более высокого уровня) UE 14, которое проводит или будет проводить измерения опорных сигналов в одной или более задействованных сотах 20.
Обращаясь к дальнейшим примерным подробностям, Фиг. 9 иллюстрирует примерную «основную последовательность», которая может использоваться как база для извлечения нескольких уникальных последовательностей со сдвигом, два примера которых показаны на Фиг. 10. Это означает, что один аспект схемы глушения, как сообщено в данном документе, представляет собой основную последовательность индикаторов глушения RS, каждое примененное в определенный интервал времени, где последовательность может представлять собой, например, последовательность двоичных индикаторов (например, '01001', где '1'=RS заглушен, '0'=RS не заглушен) или последовательность индексов интервалов времени с заглушенными RS (например, (2,5) для того же примера последовательности). Понятно, что последовательность индексов может быть преобразована в соответствующую последовательность двоичных индикаторов и наоборот.
Определенный интервал времени, например, может представлять собой минимальную единицу времени, на протяжении которой опорный сигнал является постоянным (например, символ, подкадр, несколько подкадров и т.д.). В LTE минимальная единица времени для постоянной мощности RS может представлять собой или подкадр, или событие определения местонахождения). Периодичность глушения (в случае двоичной последовательности периодичность глушения может равняться длине последовательности. В случае, когда последовательности глушения обозначаются с использованием последовательности индексов, может потребоваться, чтобы периодичность была дана в явном виде.
Что касается опорной точки, в одном или более вариантах осуществления ее можно понимать или как обозначение в явном виде циклического сдвига основной последовательности или как предоставление информации, необходимой для ее извлечения, таким образом, что последовательность глушения в измеренные единицы времени может получаться в правильном порядке. Более широко, опорная точка обозначает логическое начало периода последовательности глушения, где логическое начало не обязательно связано со временем, когда информация о глушении принята, и с какого момента оно, по существу, применяется. Таким образом, в одном или более вариантах осуществления опорная точка интерпретируется как время активирования глушения. В других вариантах осуществления опорная точка интерпретируется как логическая точка привязки. В таких случаях приемником (например, UE 14) может предполагаться, что опорная точка применяется при первой возможности для измерения после приема сигнализации о схеме глушения без предположения о том, что такая же схема глушения уже была активирована при предыдущей возможности для измерения (если только приемник не был проинформирован об этом ранее). В одном или более вариантах осуществления опорная точка представляет собой значение относительного смещения, например, относительное смещение SFN по отношению к соте, для которой определено глушение, или другой соты, которая может представлять собой опорную соту. Станет понятным, что опорная сота служит в качестве опоры для конкретных определений времени таких как те, которые относятся к измерениям временной разности опорного сигнала (RSTD).
Как отмечалось, также опорные сигналы в данном документе могут включать в себя опорные сигнала определения местоположения, опорные сигналы, специализированные для сот, или, по большому счету, любой тип опорных или пилотных сигналов, которые передаются узлом радиосети и которые могут глушиться в определенные моменты времени узлом радиосети. В качестве примера предположите основную последовательность длиной L, как показано на Фиг. 9.
Последовательность обозначается как M=(m1, m2,..., mL-1, mL) и имеет периодичность L, и опорную точку x. Исходя из этого, схема глушения RS в момент времени y (измеренного во временные интервалы, в которые применяется схема для RS, например, периодичность передачи опорного сигнала) представляет собой m((y-x)mod L)+1. Схема глушения RS в течение интервала времени длины L, начинающийся в y, может быть получена путем циклического сдвига M на ((y-x) mod L) элементов влево. См. Фиг. 10, иллюстрирующую схему глушения, распространенную на y, на основе основной последовательности с Фиг. 9 и опорной точки x.
Процесс определения схемы глушения RS в точке y называется в данном документе «распространение схемы глушения». В одном варианте осуществления настоящего изобретения циклический сдвиг распространения схемы глушения реализуется как операция умножения по модулю p(x), где p(x) представляет собой многочлен от x, и x используется для того, чтобы описать основную последовательность глушения RS многочленом степени L-1, т.е. m1 + m2x+...+mL-1xL-2, mLxL-1.
Следует отметить, что при распространении схемы глушения этим способом всегда возможно найти циклический сдвиг данной последовательности глушения RS по отношению к новой опорной точке, которая будет являться эквивалентной (основной) последовательности без сдвига и изначальной опорной точке. Таким способом уникальные схемы глушения могут распространяться для множества передающих узлов. Фиг. 11 и 12 предоставляют не ограничивающие примеры распространения последовательности глушения.
На фиг. 11 основная последовательность глушения распространена (сдвинута) для соты «i» для того, чтобы вызвать разницу во времени между опорной точкой основной последовательности и временем следующего (периодического) события опорного сигнала после приема схемы глушения. Например, UE или другое устройство беспроводной связи может распространить основную последовательность на основе осуществления циклического сдвига основной последовательности глушения для того, чтобы надлежащим образом установить по образцу с протекающей периодической передачей опорного сигнала. Фиг. 12 иллюстрирует аналогичное распространение, но где распространение осуществлено в соте «j» по отношению к опорной точке для соты «i».
Распространение может осуществиться, например, на узле 24 и/или на UE. Таким образом, узел 24 или другой сетевой узел может инициировать глушение опорных сигналов в одной или более сот 20 (например, группе обслуживающих или соседних сот 20) и на любой несущей частоте в соответствии с последовательностью глушения с определенной периодичностью в любой момент времени. С другой стороны узел 24 может предоставлять информацию о схеме глушения, используемой в сотах 20, UE 14 каждый раз после того, как глушение является инициированным в одной или более сотах 20. Важным является то, что любое данное UE 14 знает, глушатся ли или нет опорные сигналы в конкретной соте 20 в момент каждого события передачи опорного сигнала. Эта необходимость требует того, чтобы UE 14 был осведомлен о начале периода последовательности глушения в каждой соте 20, т.е. опорной точке.
На основании знания опорной точки и информации о схеме глушения (т.е. периодичности последовательности и их состояний глушения и.т.д.) UE 14 может извлечь последовательность глушения, использующуюся в каждой соте 20 в текущий момент. Как отмечается для одного или более вариантов осуществления, SFN или некоторая функция SFN может использоваться на опорной точке. Конечно, настоящее изобретение не исключает другие основы для опорной точки.
Предполагая, что опорная точка основывается на SFN, UE 14 идентифицирует идентификатор физической соты и, таким образом, имеет возможность обзавестись SFN для данной соты 20 путем считывания широковещательного канала (например, физического широковещательного канала (PBCH) в E-UTRAN). В таком примере SFN является счетчиком 1024 значений (от 0 до 1023), который обозначает текущий номер подкадра в соте 20. (Счетчик крутится, то есть, он запускается заново с 0 после достижения 1023).
Обладая знанием SFN соты, UE 14 определяет логическую начальную точку последовательности глушения в соте 20 в соответствии с опорной точкой. Опорная точка в терминах SFN может предоставляться UE любым числом вариантов. Например, может существовать общее предварительно определенное значение SFN, которое служит в качестве опорной точки. В вариации этого подхода, может существовать более одного выбора значения SFN для того, чтобы его взять в качестве опорной точки, но набор возможных значений является ограниченным и предварительно определенным. Альтернативным образом может существовать определенное установленное соответствие между значением SFN, для того, чтобы его взять в качестве опорной точки, и сотой 20 (например, соответствие SFN-to-CELL ID). В качестве еще одной альтернативы, значение SFN для того, чтобы его взять в качестве опорной точки, может являться переданным. Еще также правильное значение SFN может определяться как SFN mod N. В одном варианте осуществления N=16. Конечно, другие значения, такие как N=4, могут использоваться, и эти числовые примеры должны пониматься, как не являющиеся ограничивающими.
В соответствии с вариантом осуществления на основе предварительно определенного общего значения SFN, для того, чтобы взять в качестве опорной точки, существует одно такое значение SFN, которое является предварительно определенным в применимом стандарте беспроводной связи. В одном варианте осуществления предварительно определенное значение является общим для всех сот 20, включая обслуживающие/опорные и соседние соты, т.е. в синхронных сетях, где одно и то же значение SFN будет получаться в одно и то же время во всех сотах.
Вследствие этого UE 14 использует предварительно определенное значение в качестве опорного времени начала периодичности последовательностей глушения в каждой соте 20. Примером может являться предварительно определенное значение SFN, равное 0. Другим примером является значение SFN, равное 511. Другие предварительно определенные значения, конечно, могут выбираться. В асинхронных сетях общая опорная точка, данная SFN, должна определяться по отношению к некоторой соте, где асинхронная сеть может представлять собой сеть с сотами с синхронизацией по кадрами, сотами с синхронизацией по подкадрам, сотами без синхронизации или любой смесью сот, которые синхронизированы по-разному относительно друг друга. Синхронная сеть представляет собой сеть, где все соты синхронизированы по SFN. Это означает, что может существовать потребность осуществить некоторое корректирование последовательностей глушения сот в асинхронных сетях, например, в узле определения местоположения, для того, чтобы скорректировать их с общим опорным временем перед передачей сигналов цели определения местоположения (например, UE). Общая опорная точка может передаваться UE или являться предварительно определенной. Цель определения местоположения или должна иметь возможность обретать синхронизацию соты, по отношению к которой была определена общая опорная точка, или она должна иметь возможность снова скорректировать общую опорную точку, которая должна измеряться, с сотами.
Предварительно определенное значение SFN может являться одинаковым для всех несущих частот. Альтернативным образом значение SFN может определяться для каждой несущей частоты. В любом случае предварительно определенные SFN, при которых последовательности глушения RS начинаются или повторяются в сотах 20, сконфигурированы на надлежащих сетевых узлах (например, на базовых станциях 18). Например, eNodeB в сети LTE запрограммированы с предварительно определенным(и) значением(ями) SFN на этапе первичной установки. Такое обеспечение может реализовываться узлом функционирования и технического обслуживания (OAM) или сервером определения местоположения или, по существу, любым другим сетевым узлом.
В тех случаях, в которых опорная точка интерпретируется как фактор активации, обладание единственным предварительно определенным значением опорной точки имеет следующий недостаток. Предполагая, что используется фиксированная опорная точка (SFN=0), возможно, тогда сеть 10 должна ожидать вплоть до 1 цикла SFN (10,24 сек) для того, чтобы начать глушение RS в первый раз. Эта задержка самого плохого случая является долгой в относительных терминах. Использование более одного значения SFN в качестве возможной опорной точки устраняет этот недостаток. Таким образом, один подход, указанный в данном документе, заключатся в том, чтобы определить ограниченный набор подходящих значений SFN в качестве возможных вариантов для выбора, чтобы использовать для опорной точки. Например, опорная точка может ограничиваться несколькими значениями, например, SFN=[0, 127, 511, 1023]. Этот подход требует только небольшого числа бит для сигнализации об отборе, например, 2 бита для того, чтобы сигнализировать об одном из четырех вариантов для выбора. Применяемые стандарты беспроводной связи определят набор вариантов для выбора. Только одно из K предварительно определенных значений будет передано любому данному UE по радио интерфейсу, например, по LPR или RRC, или используя любой другой протокол передачи сигнала радио интерфейса. Переданное значение может использоваться в качестве общей опорной точки для набора сот 20, например, для группы обслуживающих/опорных или соседних сот. В таком случае UE 14 использует предварительно определенное значение в качестве опорной точки для начала периодичности последовательности глушения в каждой такой соте 20.
Примерный предварительно определенный набор подходящих значений SFN представляет собой ψ=[0, 127, 511, 1023]. Для этого примера требуется 2 бита для того, чтобы обозначить для множества UE 14, в котором конкретный SFN находится в использовании в качестве опорной точки, т.е. путем индексирования набора ψ. Предварительно определенный набор значений (ψ) SFN может являться одинаковым для всех несущих частот или предварительно определенный набор значений (ψ) SFN может различаться для каждой несущей частоты. Также опорная точка (на которой последовательность глушения опорного сигнала начинается или повторяется в данной соте 20 или в сотах 20 в сети 10) обычно должна передаваться между базовой станцией 18 и одним или более сетевыми узлами, такими как узел 24, который может представлять собой сервер определения местоположения, такой как E-SMLC в E-UTRAN. Например, сервер определения местоположения конфигурирует данный eNodeB, используя протокол LPPa, таким образом, что ENodeB обеспечивается значением SFN, которое должно использоваться eNodeB для начала последовательности глушения (как применяется к PRS, переданным eNodeB для одной или более сот 20).
В другом альтернативном варианте, упомянутом выше, соответствие SFN-to-CELL может использоваться как основа для определения значения SFN, которое должно использоваться в качестве опорной точки. В одном таком варианте осуществления SFN, использующийся для опорной точки, поставлен в соответствие информации, предназначенной только для сот, например, опорное время поставлено в соответствие идентификатору соты. Более конкретно, опорная точка определяется путем установления соответствия между значениями SFN и идентификаторами сот. Это соответствие может являться, например, предварительно определенным в применяемом стандарте беспроводной связи. В результате после приобретения идентификатора соты 20, такого как идентификатор физической соты, UE 14 может определить значение SFN, чтобы использовать его в качестве опорной точки, из предварительно определенной таблицы соответствия. Другой вариант осуществления расширяет такое установление соответствия до групп сот, в котором одна и та же опорная точка поставлена в соответствие группе сот 20, например, когда группирование основывается на классе мощности базовой станции или на любом одном или более других критериях.
Вместо предварительно определенных значений опорная точка может являться переданной. В одном таком варианте осуществления опорная точка передается множеству UE 14 в ассистирующих данных для каждой соты 20 для каждой (несущей) частоты, включая обслуживающие и соседние соты 20 и опорные или не опорные соты 20. В этом случае опорная точка может различаться для различных сот 20 различных частот. Более определенно, любое возможное значение SFN может использоваться в качестве опорного времени и, следовательно, передано множеству UE 14. Этот подход обеспечивает наиболее полную гибкость для использования по существу любого значения SFN в качестве опорной точки для любой данной соты 20 в сети 10. Поскольку SFN может принимать до 1024 значений в E-UTRAN, потребуется 10 бит, для того чтобы передать конкретное значение SFN для использования в качестве опорной точки. В качестве особого случая общее значение SFN может использоваться в качестве опорного времени по всем несущим частотам в данной соте 20, но различные значения могут использоваться в различных сотах 20. И как отмечено ранее, сигнализация протокола LPPa или другая такая сигнализация может проводиться между узлом определения местоположения и базовыми станциями, для того чтобы использовать совместно или в ином случае установить значения, которые должны использоваться в качестве опорных точек.
Во все еще другом рассматриваемом в данном документе варианте осуществления узел определения местоположения, например, E-SMLC, синхронизирует опорные точки, предназначенные только для сот, по всему множеству сот 20 и частот с одной основной, во время соответствующего преобразования схемы глушения. Одна реализация этого подхода использует подход распространения схемы глушения, представленный ранее. Имеется в виду, что преобразованные алгоритмы глушения могут предназначаться только для сот и, таким образом, передаваться для каждой соты, в то время как опорная точка является общей для всех сот 20. По меньшей мере, в одном таком варианте осуществления электронная схема обработки узла определения местонахождения выполнена с возможностью определять требуемые синхронизацию и преобразование.
Обладание основной опорной точкой может использоваться для того, чтобы снизить издержки сигнализации путем осуществления передачи информации об опорной точке только для одной соты 20, например, опорной соте (подразумевающее условное включение информации об опорной точке в состав ассистирующих данных). Более конкретно опорная точка, например, может представлять собой единичное основное значение SFN для всех сот 20, для всех несущих частот. Значение SFN может представлять собой любое значение, находящееся в пределах от 0 до 1023 в E-UTRAN.
В другом варианте осуществления основная опорная точка извлекается для каждой (несущей) частоты. В этом варианте осуществления опорная точка может представлять собой единичное универсальное значение SFN для всех сот 20 на одной несущей частоте.
Во все еще другом варианте осуществления, нацеленном на снижение издержек сигнализации, переданная основная опорная точка может извлекаться следующим образом: опорная точка = (SFN) mod (N), где N является целым. Конкретным примером является опорная точка = (SFN) mod (16). Поскольку SFN (для E-UTRAN) находится в пределах от 0 до 1023, возможное опорное время для mod 16 включает в себя 64 подходящих варианта, которые могут передаваться с использованием уменьшенного количества бит. Такая опорная точка может являться общей для всех сот на всех несущих частотах или может являться общей для всех сот 20 для каждой несущей частоты.
Поскольку опорная точка может являться универсальной для всех сот 20 или группы сот 20, то так же последовательности глушения могут являться общими для более, чем одной, соты, или могут являться специфическим для соты. В одном варианте осуществления общие параметры передаются (или присутствуют) для опорной соты 20 (и предполагаются для использования для других сот 20). Специфические для соты значения передаются или иначе присутствуют для всех сот 20, к которым они применяются. Фиг. 13 предоставляет примерную таблицу 60, показывающую, что все или группа сот 20 могут использовать общую опорную точку в комбинации с уникальной последовательностью глушения, или уникальную опорную точку в комбинации с общей последовательностью глушения, или могут использовать уникальные опорные точки последовательности глушения для каждой соты 20.
При смене опорной точки, например, со специфической для соты на универсальную или наоборот, последовательность схемы глушения должна преобразовываться соответствующим образом путем распространения схемы глушения, как описывалось ранее. Преобразование может реализовываться в базовой(ых) станции(ях) 18, в узле 24 или где-нибудь в другом месте в сети 10.
Предполагая отсутствие централизованного управления, решение о схеме глушения принимается базовой станцией 18 и передается, например, узлу определения местонахождения. Последовательности глушения, принятые на узле определения местонахождения, являются специфическими для соты; таким образом, если используется универсальная опорная точка, то преобразование последовательности схемы глушения перед отправкой ее цели определения местонахождения (например, UE) является необходимым. Рассмотрим следующий пример:
Последовательность глушения '00010001' данной Соты 1 с опорной точкой x и последовательность глушения '00010001' данной Соты 2 с опорной точкой y. В синхронной сети опорная точка x в Соте 1 соответствует тому же самому времени x в Соте 2. Предположим, что последовательность глушения Соты 2, настроенная для опорной точки a, дает '01000100'. Если x является общей опорной точкой для обеих Соты 1 и Соты 2, то сеть должна передать '00010001' для Соты 1 и '01000100' для Соты 2. В асинхронной сети опорная точка x в Соте 1 может не соответствовать тому же самому времени в Соте 2. Предположим, что принято решение о том, что опорное время x Соты 1 будет являться опорным для обеих Сот. Предположим, что опорное время x в Соте 1 соответствует опорному времени z в Соте 2. Дополнительно последовательность глушения Соты 2, настроенная для опорной точки z, дает '00100010'. Следовательно, предполагая, что опорная точка x является общей опорной для обеих сот, следующая информация будет передана цели определения местоположения: '00010001' для Соты 1 и '00100010' для Соты 2.
При наличии централизованного управления обработка происходит в обратном порядке. Например, узел определения местонахождения принимает решение о схеме, но тогда или множеству BS, или узлу определения местонахождения перед взаимодействием с множеством BS может потребоваться настроить последовательности перед применением схемы глушения, например, с общей опорной точки на специфическую для соты. Например, в асинхронной сети узел определения местонахождения может принять решение о последовательностях схемы для каждой соты, предполагая, что они являются синхронизированными (например, для того, чтобы оставлять реализацию сети простой). Если известно рассогласование данной соты 20 по отношению к опорной соте 20 или по отношению к некоторому опорному времени, то преобразование может быть сделано, например, в базовых станциях 18.
В КАЧЕСТВЕ ДРУГОГО ПРИМЕРА:
В асинхронной сети, предполагая ту же самую опорную точку x, Сота 1 и Сота 2 имеют последовательности глушения '00010001' и '00100010' соответственно. Однако Сота 1 и Сота 2 могут или не могут понять общую опорную точку и могут отнести ее к их собственной синхронизации. В таких случаях узлу определения местоположения может стать необходимым перейти к схемам глушения, специфическим для сот перед отправкой их множеству BS. Например, он может настроить на специфические для сот опорные точки, известные сотам, например, использовать специфическую для соты опорную точку x для Соты 1 и специфическую для соты опорную точку x для Соты 2 (поскольку сеть является синхронной, две опорные точки могут соответствовать разному времени в двух сотах).
Имея в виду такие примерные варианты, следует принимать во внимание, что различные варианты осуществления настоящего изобретения применяются к диапазону типов опорных сигналов, включая PRS. В случае PRS схемы глушения могут задаваться одним подкадром или одним событием определения местоположения, как наименьшей единицей времени. В любом случае, по меньшей мере, следующие расширения возможностей сигнализации обеспечиваются одним или более вариантами осуществления настоящего изобретения:
- Сигнализация от сервера LCS к цели LCS, например, от сервера определения местоположения (например, E-SMLC или SLP в LTE) к UE;
- Сигнализация от радиоузла (например, eNodeB, радиомаяка, ретранслятора и т.д.) к серверу LCS;
- Централизованная координация отсутствует: передается информация о глушении RS;
- Централизованная координация: передается индикатор в запросе об информации глушения;
- Сигнализация от сервера LCS к радиоузлу
- Централизованная координация отсутствует: передается индикатор в запросе об информации глушения, и такой индикатор может запустить или немедленную отправку отчета от радиоузла, или сервер LCS может сконфигурировать отчет по альтернативному отчетному критерию (т.е. не по требованию), следовательно, радиоузел может запустить отправку отчета об информации о глушении RS, например, всякий раз, когда она модифицируется;
- Централизованная координация: передается RS информации о глушении; это требует того, чтобы радиоузлу было известно о сервере LCS и подразумевает существование процедур для того, чтобы предварительно обмениваться информацией о конфигурации между сервером LCS и радиоузлом;
- Сигнализация от радиоузла к другому радиоузлу (например, для обмена схемами глушения RS и распределенной координации между радиоузлами);
- В том случае, если имеется множество узлов определения местоположения (например, между любыми двумя или более E-SMLC, SLP, GMLC и т.д.), сигнализация между узлами определения местоположения для того, чтобы иметь возможность обмена информацией о глушении, например универсальной опорной точкой; и
- Сигнализация от системы OAM (т.е. NMS или DMS) или другого сетевого узла (MME, узлов SON и т.д.) к серверу LCS и/или радиоузлу.
Рассмотрим пример сигнализации между радиоузлом (например, базовой станцией 18) и сервером LCS (например, узлом 24) без центральной координации. E-SMLC как указанный сервер LCS устанавливает индикатор в запросе на обмен информацией LPPa OTDOA для того, чтобы немедленно запросить 'PRS Muting Configuration' (без дальнейшего конфигурирования и критерия отчетности) и eNodeB отвечает посредством Ответа на обмен информацией LPPa OTDOA, в котором включен PRS Muting Information IE. Этот информационный элемент содержит информацию о глушении RS. E-SMLC устанавливает индикатор в запросе на обмен информацией LPPa OTDOA для того, чтобы немедленно запросить 'PRS Muting Configuration' и дополнительно конфигурирует критерий отчетности (новый IE 'Reporting Criteria') для того, чтобы информировать eNodeB о том, что ему требуются новые отчеты, если информация должна в будущем измениться. Новая процедура OTDOA Information Report добавляется к LPPa для того, чтобы поддерживать дополнительную отчетность. eNodeB немедленно отправляет отчет после первого запроса и также в любое время, когда информация изменяется.
В качестве примера сигнализации между сервером LCS и радиоузлом с централизованной координацией, E-SMLC и eNodeB обмениваются информацией о конфигурации заблаговременно через посредство LPPa, таким образом, eNodeB становится известно обо всех применимых E-SMLC, и они устанавливают постоянное или полупостоянное взаимодействие. (Следует отметить, что это поведение будет в ряду изменений в текущей архитектуре определения местоположения 3GPP). Затем E-SMLC распределяет рассматриваемую информацию о глушении RS по задействованным eNodeB.
Дополнительные примеры сигнализации включают в себя предполагаемую сигнализацию между радиоузлами, как, например, чтобы поддержать обмен информацией о схемах глушения между такими узлами и/или поддержать совместное определение схем глушения между узлами. В качестве конкретного примера, информация о глушении RS добавляется в протокол X2AP, а именно в процедуры установки X2 и обновления конфигурации eNodeB, для того, чтобы обеспечить возможность таких обменов между множеством eNodeB в сети LTE через протокол X2.
Другая сигнализация, рассматриваемая в данном документе, относится к поиску OAM. Например, информация о глушении RS предоставляется eNodeB системе OAM в пределах беспроводной сети связи для поиска применимым сервером OAM, который может представлять собой E-SMLC или SLP.
Имея в виду такую сигнализацию, и в свете последующих примеров, настоящее изобретение станет понятным в качестве предложения некоторых преимуществ, включающих в себя, но не ограничивающихся этими пунктами: гибкая схема глушения с простой сигнализацией с низкими издержками; отсутствие необходимости предварительно определенных алгоритмов глушения PRS; и сниженная сложность UE (отсутствие необходимости обнаружения RS вслепую), обработки, затрат мощности в комбинации с усовершенствованной эффективностью определения местоположения.
Эти и другие преимущества реализованы посредством различных аспектов настоящего изобретения, включающим в себя определение схемы глушения соты как последовательности глушения, определяющей алгоритм глушения, применяемый или наложенный на лежащую в основании периодичность передачи опорного сигнала, и опорную точку, которая обозначает или идентифицирует виртуальную начальную точку для соотнесения последовательности глушения к передачам опорного сигнала, - т.е. опорная точка обозначает или позволяет определение логической начальной точки для последовательности глушения, когда она применяется к передачам опорного сигнала в данной соте. С этим подходом опорные точки могут являться специфическими для сот или универсальными (общими) для нескольких сот и, подобным же образом, последовательности глушения могут являться специфическими для сот или универсальными. Одна эффективная реализация обеспечивает условную передачу универсальной опорной точки только для опорной соты.
Также для случая без централизованного управления схемами глушения RS, узел определения местоположения (например, E-SMLC или SLP) выполнен с возможностью преобразовывать специфические для сот основные последовательности.
Конечно, настоящее изобретение не огранивается последующими признаками и преимуществами. В значительной степени настоящее изобретение ограничивается только формулой изобретения и ее легальными эквивалентами.

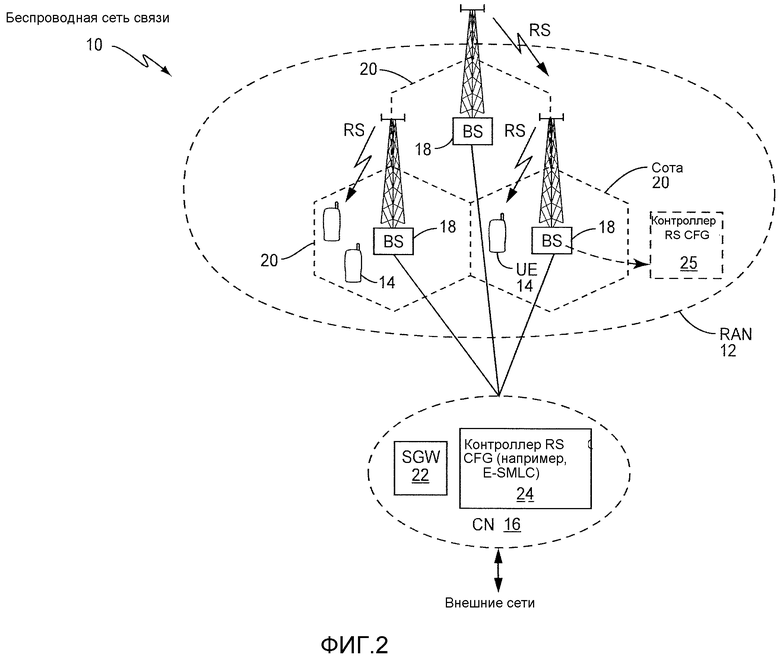
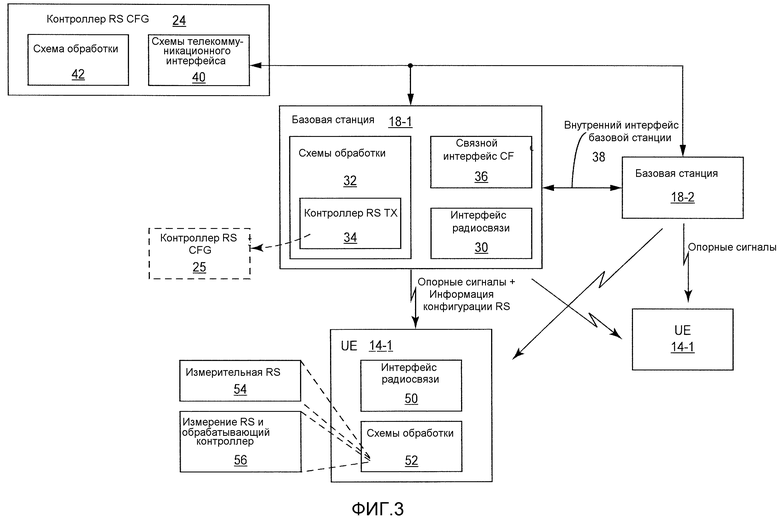
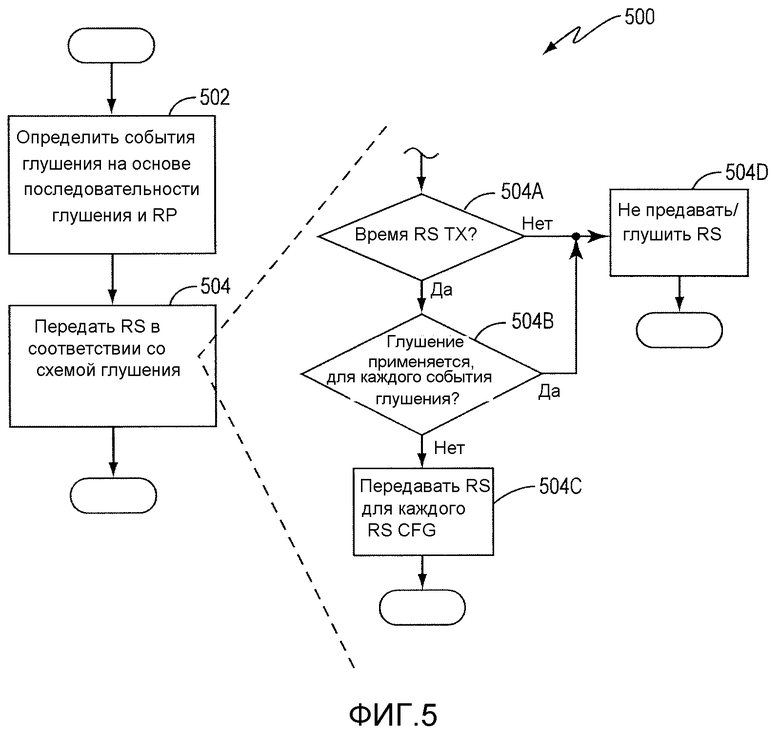
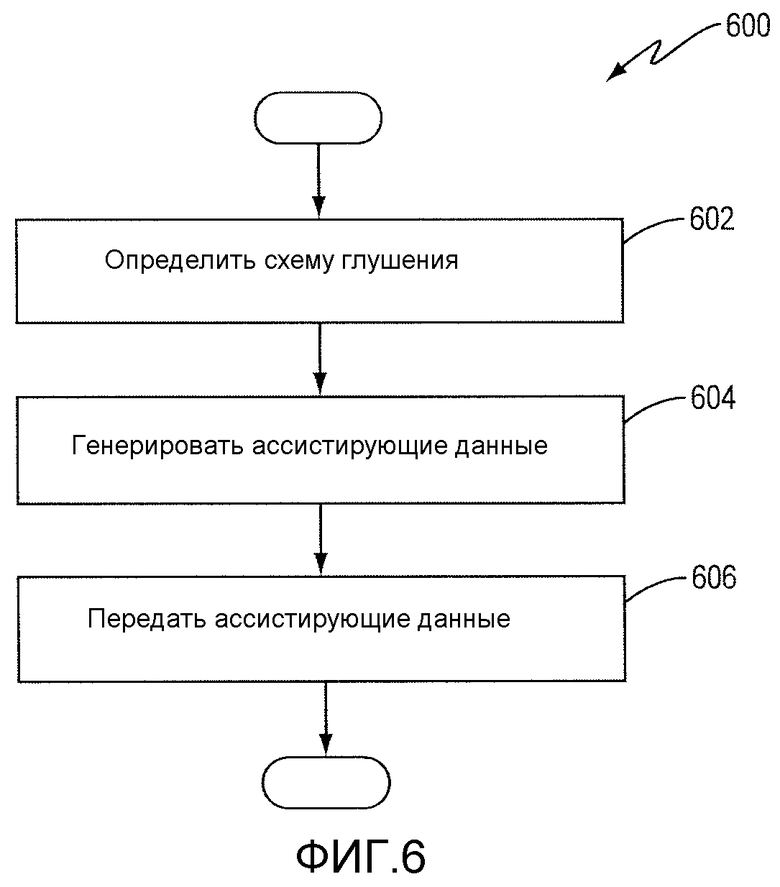
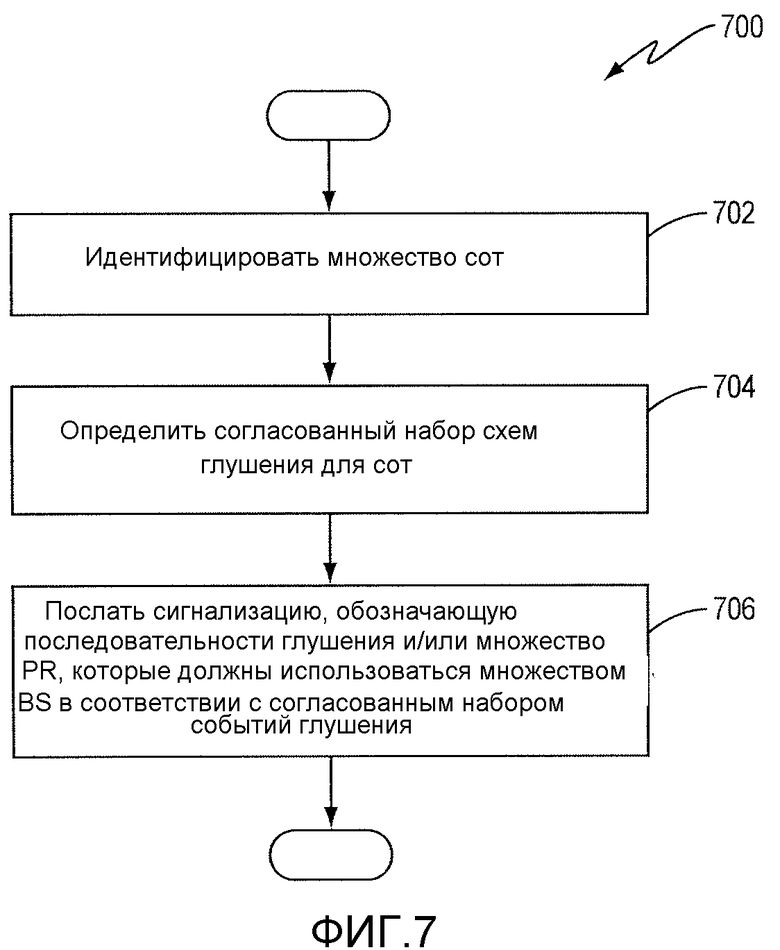
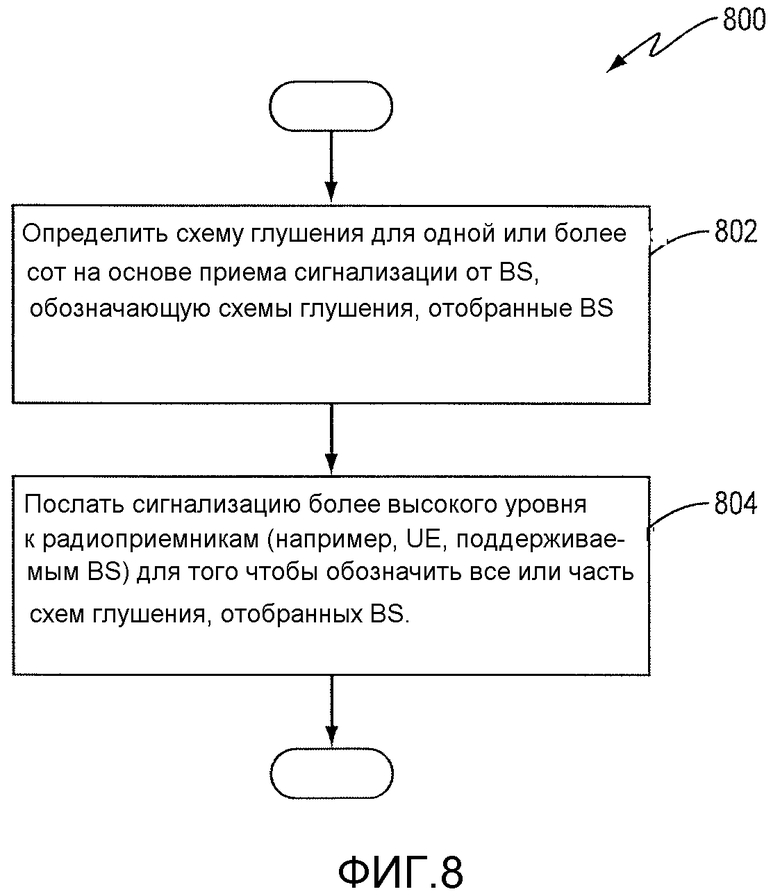
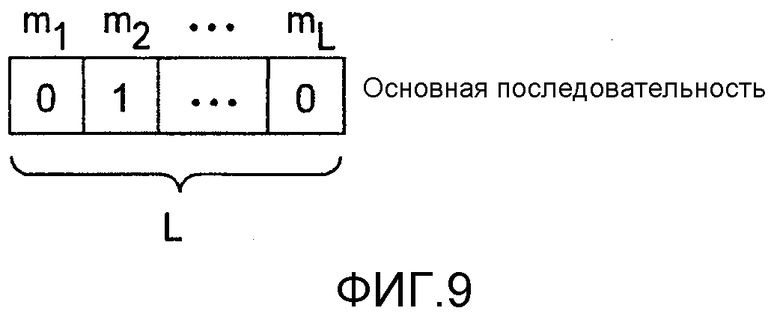
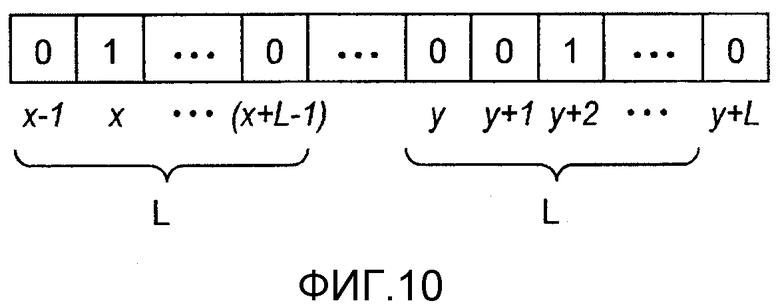

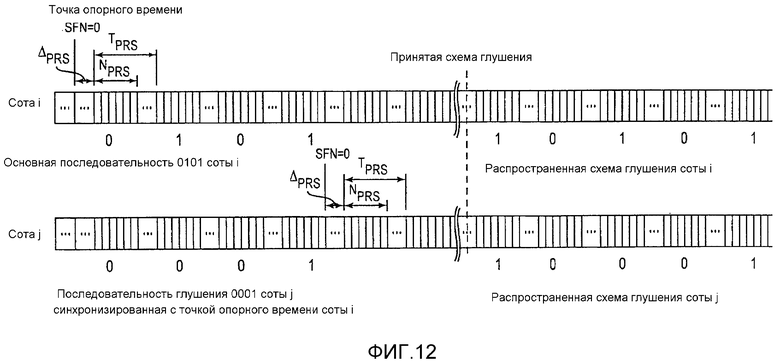
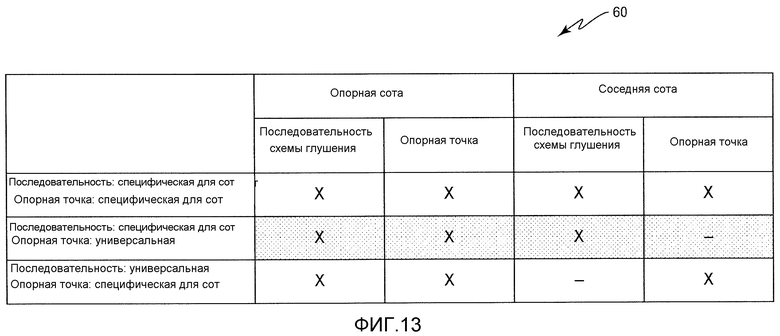
Изобретение относится к управлению помехами в беспроводных сетях связи и, более конкретно, к поддержке сигнализации, связанной с глушением опорных сигналов (RS) для снижения помех в беспроводных сетях связи, которые осуществляют передачу опорных сигналов, например, для измерения местоположения. Техническим результатом является упрощение сигнализации, требующейся для того, чтобы управлять или обозначать схему глушения, использующуюся в интересующих сотах, обеспечивают преимущественную основу для распространения схем глушения среди сот (20), устранить потребность в предварительно определенных схемах глушения и потребность обнаружения глушения вслепую устройствами (14) беспроводной связи, такими как UE. Настоящее изобретение обеспечивает схему глушения для передач опорных сигналов в виде алгоритма, определенного, по меньшей мере, комбинацией из последовательности глушения и опорной точки. События глушения для данной соты (20) беспроводной сети связи таким образом разграничиваются от другой соты путем использования другой последовательности глушения, другой опорной точки или обоих. Кроме этого, настоящее изобретение предусматривает использование общей последовательности глушения или опорной точки по всем сотам (20), причем события глушения разделяются между сотами (20) через использование различных опорных точек (в случае общей последовательности глушения) или через использование различных последовательностей глушения (в случае общей опорной точки) или различных последовательностей и различных опорных точек. 6 н. и 36 з.п. ф-лы, 13 ил.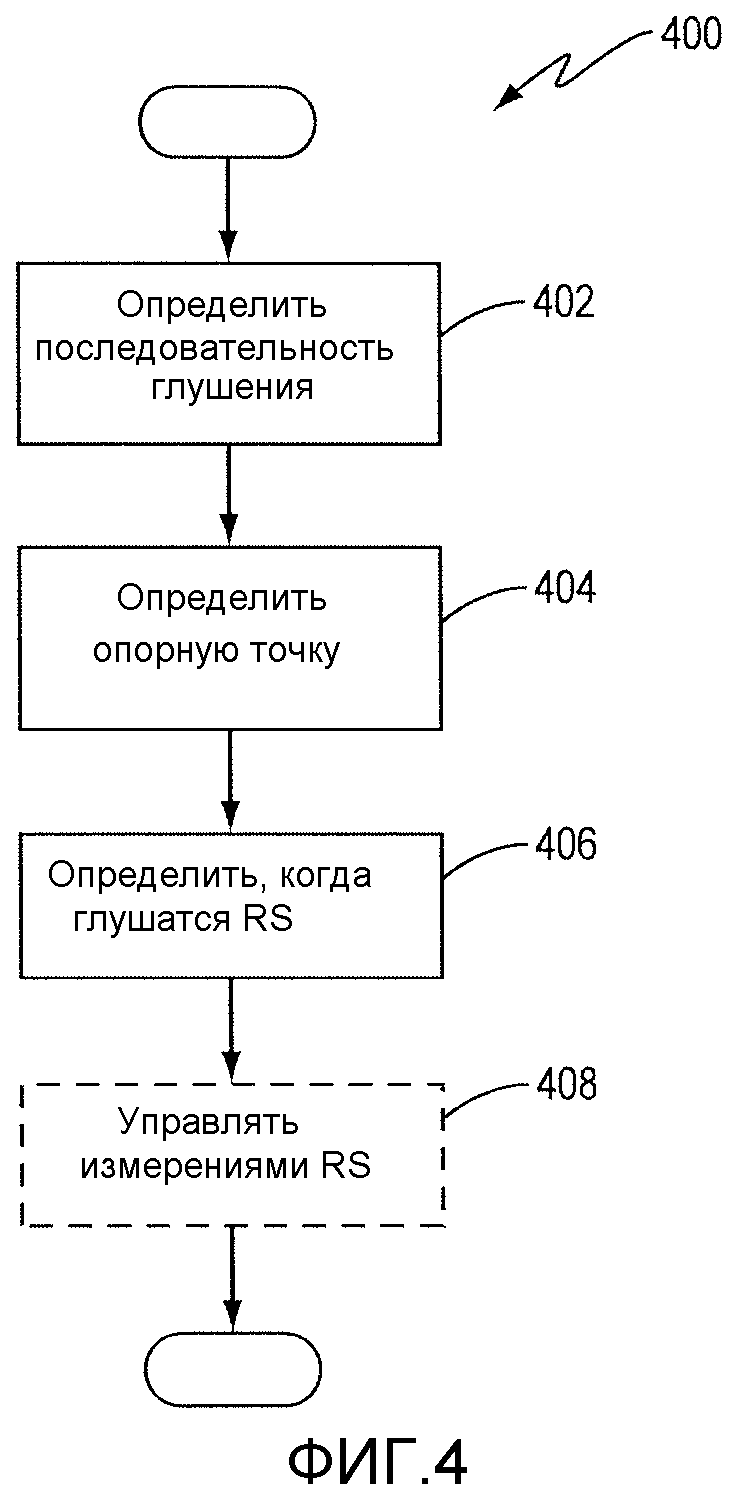
1. Способ (400) в устройстве (14) беспроводной связи для определения моментов времени, когда периодически передаваемые опорные сигналы глушатся в соте (20) беспроводной сети (10) связи, указанный способ (400), содержащий:
определение (402) периодической последовательности глушения, обозначающей алгоритм глушения, использующийся для глушения указанных опорных сигналов в соте (20); и
определение (404) опорной точки, относящей периодический алгоритм глушения к определенному опорному времени; и
определение (406), когда опорные сигналы глушатся в соте (20) в соответствии с периодической последовательностью глушения и опорной точкой.
2. Способ (400) по п. 1, также содержащий управляющее (408) измерение опорных сигналов устройством (14) беспроводной связи для соты (20) в соответствии с указанным определением того, когда опорные сигналы глушатся в соте (20).
3. Способ (400) по п. 1, в котором указанные опорные сигналы передаются во время периодических событий опорных сигналов, и в котором определение периодической последовательности глушения включает в себя прием последовательности индикаторов в составе ассистирующих данных, передаваемых устройству (14) беспроводной связи, в которой каждый индикатор представляет данное событие опорного сигнала и обозначает, будет ли применено глушение для того данного события опорного сигнала.
4. Способ (400) по п. 3, в котором определение опорной точки содержит использование системного номера кадра (SFN) опорной соты (20) в беспроводной сети (10) связи в качестве опорной точки, и в котором отнесение алгоритма периодического глушения к конкретному времени включает в себя логическое ассоциирование первого индикатора в последовательности индикаторов с первым событием опорного сигнала, который начинается после начала SFN=0 в опорной соте (20).
5. Способ (400) по п. 1, в котором сота (20) не является опорной сотой (20) для устройства (14) беспроводной связи, которая служит в качестве опорной для конкретных определений времени в устройстве (14) беспроводной связи, и в котором способ также включает в себя определение опорной точки как общей опорной точки по отношению к опорной соте (20) или определение последовательности глушения как общей последовательности глушения по отношению к опорной соте (20).
6. Способ (400) по п. 1, который дополнительно содержит определение опорной точки как специфической для соты опорной точки, специфической для соты (20), или определение последовательности глушения как специфической для соты последовательности глушения, специфической для соты (20).
7. Способ (400) по п. 1, в котором сота (20) является одной из некоторого количества сот, и в котором указанное определение последовательности глушения и указанное определение опорной точки содержит прием ассистирующих данных от беспроводной сети (10) связи, которая непосредственно или опосредованно идентифицирует опорную точку и последовательность глушения для каждой соты (20) из некоторого количества сот.
8. Способ (400) по п. 7, в котором указанные ассистирующие данные включают в себя общую опорную точку, которая должна использоваться устройством (14) беспроводной связи для всех сот (20) из некоторого количества сот, наряду со специфической для соты последовательностью глушения для каждой соты из некоторого количества сот, или в которой указанные ассистирующие данные включают в себя специфическую для соты опорную точку для каждой соты (20) из некоторого количества сот, наряду с общей последовательностью глушения, которая должна использоваться устройством (14) беспроводной связи для всех сот (20) из некоторого количества сот.
9. Способ (400) по п. 7, в котором указанные ассистирующие данные включают в себя специфическую для соты последовательность глушения для каждой соты (20) из некоторого количества сот, наряду со специфической для соты опорной точкой для каждой соты (20) из некоторого количества сот.
10. Способ (400) по п. 1, в котором определение того, когда опорные сигналы глушатся в соте (20), в соответствии с периодической последовательностью глушения и опорной точкой, содержит:
определение разницы между опорной точкой и другой точкой, относящейся к следующему событию опорного сигнала в соте (20); и
определение того, когда опорные сигналы глушатся, на основе циклического сдвига основной последовательности глушения на величину, соответствующую указанной разнице.
11. Способ (400) по п. 10, также включающий в себя прием основной последовательности глушения в составе ассистирующих данных, принятых из беспроводной сети (10) связи.
12. Способ (400) по п. 1, в котором, по меньшей мере, одно из указанных определений последовательности глушения и указанного определения опорной точки содержит прием сигнализации от узла (24) определения местонахождения в беспроводной сети (10) связи.
13. Устройство (14) беспроводной связи, выполненное с возможностью измерять опорные сигналы, периодически передаваемые для соты (20) в беспроводной сети (10) связи, указанное устройство (14) беспроводной связи, содержащее:
приемник (50), выполненный с возможностью принимать сигналы от беспроводной сети связи, включая опорные сигналы, периодически передаваемые для соты;
контроллер (56), оперативно связанный с приемником (50) и выполненный с возможностью:
определять периодическую последовательность глушения, обозначающую алгоритм глушения, использующийся для глушения указанных опорных сигналов в соте (20); и
определять опорную точку, относящую периодический алгоритм глушения к определенному опорному времени; и
определять, когда опорные сигналы глушатся в соте (20) в соответствии с периодической последовательностью глушения и опорной точкой.
14. Устройство (14) беспроводной связи по п. 13, также содержащее электронную схему (54) измерения, выполненную с возможностью измерения опорного сигнала, и в котором контроллер (56) выполнен с возможностью управлять измерениями опорных сигналов при помощи электронной схемы (54) измерения для соты (20) в соответствии с определением того, когда опорные сигналы глушатся в соте (20).
15. Устройство (14) беспроводной связи по п. 13, в котором указанные опорные сигналы передаются в момент периодических событий опорного сигнала, и в котором контроллер (56) определяет периодическую последовательность глушения на основе приема последовательности индикаторов в составе ассистирующих данных, переданных устройству (14) беспроводной связи, в которой каждый индикатор представляет данное событие опорного сигнала и обозначает, будет ли применено глушение для того данного события опорного сигнала.
16. Устройство (14) беспроводной связи по п. 15, в котором контроллер (56) выполнен с возможностью определять опорную точку путем использования системного номера кадра (SFN) опорной соты (20) в сети (10) беспроводной связи в качестве опорной точки, и соотносить периодический алгоритм глушения к определенному опорному времени путем логического связывания первого индикатора в последовательности индикаторов с первым событием опорного сигнала, который начинается после начала SFN=0 в опорной соте (20).
17. Устройство (14) беспроводной связи по п. 13, в котором сота (20) не является опорной сотой (20) для устройства (14) беспроводной связи, которая служит опорной для определенных временных определений на устройстве (14) беспроводной связи, и в котором контроллер (56) выполнен с возможностью определять опорную точку как общую опорную точку по отношению к опорной соте (20), или определять последовательность глушения как общую последовательность глушения по отношению к опорной соте (20).
18. Устройство (14) беспроводной связи по п. 13, в котором контроллер (56) выполнен с возможностью определять опорную точку как специфическую для соты опорную точку, специфическую для соты (20), или определять последовательность глушения как специфическую для соты последовательность глушения, специфическую для соты (20).
19. Устройство (14) беспроводной связи по п. 13, в котором сота (20) является одной из некоторого количества сот (20), и в котором указанное определение последовательности глушения и указанное определение опорной точки включает в себя прием ассистирующих данных из беспроводной сети (10) связи, которая непосредственно или опосредованно идентифицирует опорную точку и последовательность глушения для каждой соты (20) из некоторого количества сот (20).
20. Устройство (14) беспроводной связи по п. 19, в котором указанные ассистирующие данные включают в себя общую опорную точку, которая должна использоваться устройством (14) беспроводной связи для всех сот (20) из некоторого количества сот (20), наряду со специфической для соты последовательностью глушения для каждой соты (20) из некоторого количества сот (20), или в котором указанные ассистирующие данные включают в себя специфическую для соты опорную точку для каждой соты (20) из некоторого количества сот (20), наряду с общей последовательностью глушения, которая должна использоваться устройством (14) беспроводной связи для всех сот (20) из некоторого количества сот (20).
21. Устройство (14) беспроводной связи по п. 19, в котором указанные ассистирующие данные содержат специфическую для соты последовательность глушения для каждой соты (20) из некоторого количества сот (20), наряду со специфической для соты опорной точкой для каждой соты (20) из некоторого количества сот (20).
22. Устройство (14) беспроводной связи по п. 13, в котором контроллер (56) выполнен с возможностью определять последовательность глушения путем определения разницы между опорной точкой и другой точкой, соответствующей следующему событию опорного сигнала в соте (20), и циклически сдвигая основную последовательность глушения на величину, соответствующую указанной разнице.
23. Устройство (14) беспроводной связи по п. 22, также включающее в себя прием основной последовательности глушения от беспроводной сети (10) связи.
24. Устройство (14) беспроводной связи по п. 13, в котором контроллер (56) выполнен с возможностью определять, по меньшей мере, одну последовательность глушения и опорную точку из сигнализации, принятой от узла (24) определения местоположения в беспроводной сети (10) связи.
25. Способ (500) в базовой станции (18), выполненной с возможностью для использования в беспроводной сети (10) связи, указанный способ, содержащий:
определение схемы глушения для соты (20), управляемой базовой станцией (18), причем указанная схема глушения определена, по меньшей мере, частично, при помощи, по меньшей мере, одного из опорной точки и последовательности глушения, включающей в себя алгоритм для глушения опорных сигналов, периодически передаваемых от соты (20); и
глушение опорных сигналов для соты (20) в соответствии со схемой глушения.
26. Способ (500) по п. 25, в котором определение схемы глушения содержит принятие решения о схеме глушения автономным образом для ячейки (20) или совместно для ячейки (20) в соединении с одной или более соседних сот (20), и также включающей в себя передачу схемы глушения для соты (20) другому узлу (24) в беспроводной сети (10) связи.
27. Способ (500) по п. 26, в котором другой узел (24) включает в себя узел определения местоположения, и в котором передача схемы глушения другому узлу (24) включает в себя передачу схемы глушения для соты узлу определения местоположения в соответствии с определенным протоколом сигнализации определения местоположения.
28. Способ (500) по п. 26, в котором в случае, если решение о схеме глушения принято совместно в соединении с одной или более соседних сот (20), способ также включает в себя базовую станцию (18), обменивающуюся сигнализацией с одной или более соседними базовыми станциями (18), связанными с одной или более соседних сот (20) для совместного определения схемы глушения.
29. Способ (500) по п. 25, в котором решение о схеме глушения для соты (20) принято на узле определения местоположения или на узле (24) функционирования и технического обслуживания в беспроводной сети (10) связи, и в котором определение схемы глушения включает в себя определение схемы глушения из сигнализации, принятой от узла определения местоположения или узла (24) функционирования и технического обслуживания.
30. Базовая станция (18), выполненная с возможностью использования в беспроводной сети связи, указанная базовая станция (18), содержащая:
интерфейс (30) радиосвязи, выполненный с возможностью передавать сигналы, включая опорные сигналы;
контроллер (34), оперативно связанный с интерфейсом радиосвязи и выполненный с возможностью определять схему глушения для сетевого контроллера базовой станцией (18), указанная схема глушения определена, по меньшей мере, частично, при помощи, по меньшей мере, одного из опорной точки и последовательности глушения, включающая в себя алгоритм для глушения опорных сигналов, периодически передаваемых для соты (20); и глушить опорные сигналы для соты (20) в соответствии со схемой глушения.
31. Базовая станция (18) по п. 30, в которой указанная базовая станция (18) выполнена с возможностью принимать решение о схеме глушения путем определения автономным образом для ячейки (20) или совместно для ячейки (20) в соединении с одной или более соседних сот (20), и также включающая в себя связной интерфейс (36), выполненный с возможностью передачи схемы глушения для соты (20) другому узлу (24) в беспроводной сети (10) связи.
32. Базовая станция (18) по п. 31, в которой другой узел (24) включает в себя узел определения местоположения и в котором базовая станция (18) выполнена с возможностью передавать схему глушения для соты (20) узлу определения местоположения в соответствии с определенным протоколом сигнализации определения местоположения.
33. Базовая станция (18) по п. 31, в которой в случае, когда решение о схеме глушения принято для соты (20) совместно в соединении с одной или более соседних сот (20), базовая станция (18) выполнена с возможностью обмениваться сигнализацией с одной или более соседних базовых станций (18), связанных с одной или более соседних сот (20), через посредство внутреннего связного интерфейса (38) базовой станции для совместного принятия решения о схеме глушения.
34. Базовая станция (18) по п. 30, в которой решение о схеме глушения для каждой соты (20) принимается на узле определения местоположения или узле (24) функционирования и технического обслуживания в беспроводной сети (10) связи, и в которой базовая станция (18) выполнена с возможностью определять схему глушения из сигнализации, принятой от узла определения местоположения или узла (24) функционирования и технического обслуживания.
35. Способ (600) в узле определения местоположения, выполненного с возможностью функционирования в беспроводной сети (10) связи, причем указанный способ содержит:
определение (602) схемы глушения для каждой одной или более сот (20) беспроводной сети (10) связи, в которой схемы глушения одной или более сот (20) управляют временем, когда глушение применяется к опорным сигналам, периодически передаваемым в каждую из одной или более сот (20);
генерирование ассистирующих данных для одного или более пользовательского оборудования (14), причем указанные ассистирующие данные обозначают схемы глушения одной или более сот (20); и
передачу (606) ассистирующих данных одному или более пользовательскому оборудованию (14).
36. Способ (600) по п. 35, в котором определение схем глушения включает в себя определение схем глушения из сигнализаций, принятых от одной или более базовых станций (18), обозначающих схемы глушения.
37. Способ (600) по п. 36, в котором определение схем глушения из сигнализации, принятой от одной или более базовых станций (18), включает в себя прием сигнализации, обозначающей первую схему глушения для первой соты (20) и извлечение второй схемы глушения для второй соты (20) по отношению ко второй соте (20) на основе передачи временной разницы между первой и второй сотами, указанное извлечение второй схемы глушения включает в себя осуществление сдвига последовательности глушения первой схемы глушения на величину, зависящую от временной разницы передачи, для того, чтобы получить последовательность со сдвигом, которую нужно использовать в качестве последовательности глушения второй схемы глушения, в которой последовательность глушения данной схемы глушения обозначает алгоритм глушения, применяемый к периодическим передачам опорных сигналов для соответствующей соты (20).
38. Способ (600) по п. 35, в котором определение схем глушения включает в себя узел (24) определения местоположения, принимающий решение о схемах глушения, которые должны использоваться для каждой из одной или более сот (20), и также включающий посылку управляющей сигнализации базовой станции (18) или станциям (18), связанным с одной или более сот (20) для того, чтобы заставить одну или более базовые станции (18) принять схемы глушения, о которых принято решение узлом (24) определения местонахождения.
39. Узел (24) определения местонахождения, выполненный с возможностью для функционирования в беспроводной сети (10) связи, указанный узел (24) определения местонахождения, содержащий:
одну или более обрабатывающих схем (42), выполненных с возможностью: определять схему глушения для одной или более сот (20) беспроводной сети (10) связи, в которой схемы глушения одной или более сот (20) управляют временем, когда применяется глушение к опорным сигналам, периодически передаваемым в каждую из одной или более сот (20); и генерировать ассистирующие данные для одного или более пользовательского оборудования (14), причем указанные ассистирующие данные обозначают схемы глушения одной или более сот (20); и
телекоммуникационный интерфейс (40) для оперативного взаимодействия с одной или более схемами (42) обработки, и выполненный с возможностью передавать ассистирующие данные одному или более пользовательскому оборудованию (14).
40. Узел (24) определения местонахождения по п. 39, в котором узел (24) определения местонахождения выполнен с возможностью определять схемы глушения на основе того, что он выполнен с возможностью определять схемы глушения для сигнализации, принятой от одной или более базовых станций (18), обозначающих схемы глушения.
41. Узел (24) определения местонахождения по п. 39, в котором узел (24) определения местонахождения выполнен с возможностью определять схемы глушения для сигнализации, принятой от одной или более базовых станций (18), на основе того, что он выполнены с возможностью:
принимать сигнализацию, обозначающую первую схему глушения для первой соты (20) и извлекать вторую схему глушения для второй соты (20) на основе временной разницы передачи между первой и второй сотами (20); и
в котором узел (24) определения местонахождения, выполненный с возможностью извлекать вторую схему глушения, включает в себя осуществление сдвига последовательности глушения первой схемы глушения на величину, зависящую от временной разницы передачи, для того, чтобы получить последовательность со сдвигом, которая должна использоваться в качестве последовательности глушения второй схемы глушения, в которой последовательность глушения данной схемы глушения обозначает алгоритм глушения, применяемый к периодической передаче опорных сигналов для соответствующей соты (20).
42. Узел (24) определения местонахождения по п. 39, в котором узел (24) определения местонахождения выполнен с возможностью определять схемы глушения путем принятия решения узлом (24) определения местонахождения о схемах глушения, которые должны использоваться для каждой из одной или более сот (20), и также путем посылки управляющей сигнализации базовой станции (18) или станциям (18), связанным с одной или более сотами (20), для того чтобы заставить одну или более базовые станции (18) принять схемы глушения, о которых было принято решение узлом (24) определения местонахождения.
| MOTOROLA: "Positioning Subframe Muting for OTDOA Measurements", 3GPP DRAFT; R1-093406, 3RD GENERATION PARTNERSHIP PROJECT (3GPP), MOBILE COMPETENCE CENTRE ; 650, ROUTE DES LUCIOLES ; F-06921 SOPHIA-ANTIPOLIS CEDEX ; FRANCE, no | |||
| Shenzhen, China; 24.08.2009 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

