Область техники, к которой относится изобретение
Настоящее изобретение относится к двигателям внутреннего сгорания, в частности двигателям дизельного типа, снабженным системой впуска воздуха, выполненной с возможностью создания завихрения в камерах сгорания двигателя.
Уровень техники
Для двигателей внутреннего сгорания известно, что турбулентность может улучшить подготовку воздушно-топливной смеси в камере сгорания и процесс горения в ней, тем самым улучшая рабочие характеристики двигателя.
Обычная система впуска воздуха, как правило, имеет для каждой камеры сгорания двигателя по меньшей мере один прямой впускной канал, служащий для уменьшения до минимума сопротивления входящему потоку воздуха, и тем самым увеличения объемного коэффициента полезного действия.
Когда двигатель работает с высокой нагрузкой, хотя сопротивление потоку у впускного канала является низким, в камере сгорания создается достаточная турбулентность для поддержания на приемлемом уровне смешивания и сгорания воздушно-топливной смеси.
И напротив, когда двигатель работает с низкой или средней нагрузкой, низкое сопротивление потоку впускного канала и низкий объем входящего потока воздуха будут недостаточны для создания достаточной турбулентности в камере сгорания.
Для улучшения турбулентности были предложены системы впуска воздуха, которые обеспечивают каждую камеру сгорания не только прямым впускным каналом, но также дополнительным завихряющим впускным каналом, специально предназначенным сообщать вихревое перемещение входному воздушному потоку.
Завихряющий впускной канал этого типа представляет собой так называемый спиральный впускной канал, проходящий по спирали вокруг оси опорной поверхности впускного клапана.
Такие системы впуска воздуха дополнительно содержат элемент управления завихрением для каждой камеры сгорания двигателя, обычно в виде поворотной створки.
Данная створка управления завихрением располагается в проходе, соединяющем впускной коллектор с прямым впускным каналом камеры сгорания, для избирательного перекрытия указанного прохода в соответствии с режимом нагрузки двигателя.
Когда двигатель работает с низкой или средней нагрузкой, створка управления завихрением удерживается в закрытом положении, чтобы не допустить протекание входящего воздуха через прямой впускной канал. Тем самым большая часть входящего воздуха течет в камеру сгорания через завихряющий впускной канал, приобретая сильную турбулентность.
Когда двигатель работает с высокой нагрузкой, створка управления завихрением удерживается в открытом положении, чтобы позволить входному воздуху течь в цилиндр через прямой канал. Большая часть входного воздуха течет в камеру сгорания через прямой впускной канал, из-за меньшего сопротивления потоку последнего по сравнению с завихряющим впускным каналом, тем самым уменьшая падение давления и получая высокий объемный коэффициент полезного действия.
Все створки управления завихрением одновременно поворачиваются между их открытым и закрытым положением с помощью общего электромеханического привода.
Электромеханический привод обычно содержит подвижный вал, который называется приводным валом.
Электромеханический привод может быть приводом поворотного или линейного типа, например приводной вал представляет собой поворотный вал или вал с возвратно-поступательным перемещением соответственно.
Приводной вал механически связан со створками управления завихрением с помощью соответствующей кинематической цепи, которая будет содержать зубчатые колеса или рычаги.
Кинематическая цепь предназначена для преобразования любого поворотного или линейного перемещения приводного вала в соответствующий поворот створок управления завихрением.
Электромеханический привод дополнительно содержит встроенный датчик положения для определения в режиме реального времени углового или линейного положения приводного вала.
Электромеханический привод управляется блоком управления двигателем, на основе сигнала от датчика положения и режима работы двигателя.
В качестве альтернативы электромеханический двигатель может иметь встроенный контроллер на базе микропроцессора, который управляет поворотом приводного вала на основе сигнала от датчика положения и который соединен с блоком управления двигателем, для приема от него команд, указывающих, какое положение необходимо достичь согласно режимам работы двигателя.
По существу блок управления двигателем определяет положение приводного вала и режим работы двигателя, и когда двигатель работает с низкой или средней нагрузкой, подает команду электромеханическому приводу повернуть створки управления завихрением в закрытое положение, а когда двигатель работает с высокой нагрузкой, подает команду электромеханическому приводу повернуть створки управления завихрением в открытое положение.
Тем самым во время нормальной работы, на приводной вал подаются команды для перемещения в обоих направлениях между первым и вторым конечным положением, которые соответствуют открытому и закрытому положению створок управления завихрением.
Задачей настоящего изобретения является определение целостности кинематической схемы, соединяющей подвижный вал привода со створками управления завихрением.
Другой задачей настоящего изобретения является достижение указанной цели с помощью довольно простого, рационального и недорого решения.
Эти задачи решаются настоящим изобретением, отличительные признаки которого приведены в независимых пунктах формулы изобретения. Зависимые пункты формулы изобретения описывают предпочтительные и/или наиболее предпочтительные варианты изобретения.
Раскрытие изобретения
Согласно изобретению предлагается способ диагностики целостности системы создания завихрения двигателя внутреннего сгорания, содержащей:
множество элементов управления завихрением, расположенных отдельно друг от друга в соответствующем воздушном канале, соединяющем впускной коллектор двигателя с впускным каналом камеры сгорания двигателя,
привод с подвижным валом,
кинематическую цепь для механического соединения элементов управления завихрением с подвижным валом привода,
средство управления приводом для нормального перемещения подвижного вала привода в первом направлении к первому конечному положению и во втором, противоположном направлении ко второму конечному положению; и
детектирующее средство привода для определения положения подвижного вала привода.
Способ диагностики согласно изобретению включает в себя:
обеспечение по меньшей мере одного механического стопора для непосредственного действия на один элемент кинематической цепи, чтобы косвенно ограничить перемещение подвижного вала привода в первом направлении в первом контрольном положении, совпадающем или находящемся после первого конечного положения,
подачу команды на средство управления приводом для перемещения подвижного вала привода в первом направлении к первому контрольному положению; и
проверку с помощью средства определения положения привода, остановился ли подвижный вал привода в первом контрольном положении или же вышел за его пределы.
Если подвижный вал привода остановился в первом контрольном положении, заданным механическим стопором, то кинематическая цепь, соединяющая подвижный вал привода с элементами управления завихрением, является целостной и работает правильно.
В противном случае, если подвижный вал привода вышел за пределы первого контрольного положения, заданного механическим стопором, то кинематическая цепь является нарушенной, и системой управления двигателем может быть выдан сигнал неисправности.
Для улучшения диагностики способ согласно изобретению предпочтительно дополнительно включает в себя:
обеспечение по меньшей мере второго механического стопора для непосредственного действия на один элемент кинематической цепи, чтобы косвенно ограничить перемещение подвижного вала привода во втором направлении во втором контрольном положении, совпадающем или находящемся после второго конечного положения,
подачу команды на средство управления приводом для перемещения подвижного вала привода во втором направлении ко второму контрольному положению, и
проверку с помощью средств определения положения привода, остановился ли подвижный вал привода во втором контрольном положении или же вышел за его пределы.
Используя датчик положения, встроенный в привод, способ согласно изобретению может осуществлять диагностику целостности кинематической цепи без необходимости установки какого-либо дополнительного датчика положения, тем самым уменьшая стоимость системы и упрощая конструкцию системы.
Способ диагностики согласно изобретению может выполняться блоком управления двигателем (БУД) после каждого выключения двигателя, или циклически после предварительного заданного количества километров, пройденных транспортным средством, на котором установлен двигатель.
В изобретении дополнительно предлагается двигатель внутреннего сгорания, предназначенный для осуществления данного способа диагностики.
Другие цели, признаки и преимущества настоящего изобретения станут очевидны из приведенного ниже подробного описания предпочтительных вариантов осуществления, проиллюстрированных на прилагаемых чертежах.
Краткое описание чертежей
Фиг. 1 представляет собой схематичный вид одноблочного двигателя, снабженного системой впуска воздуха согласно настоящему изобретению.
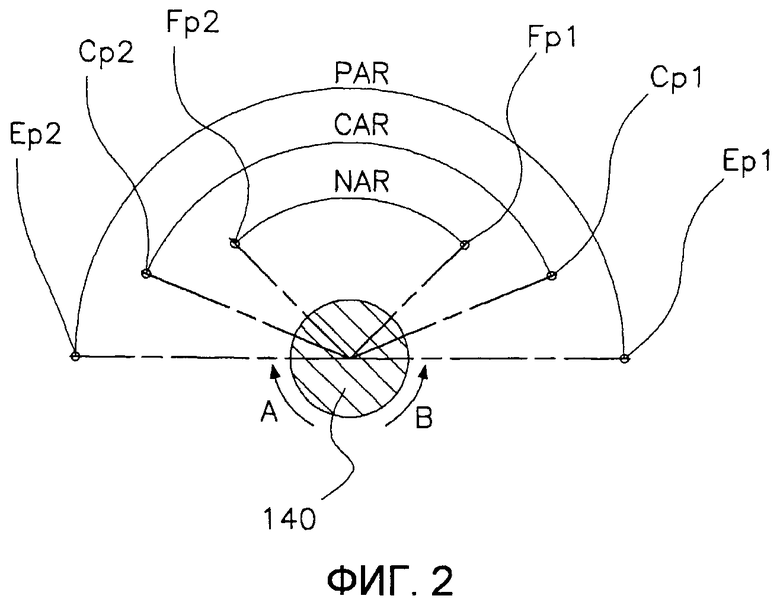
Фиг. 2 представляет собой разрез II-II на фиг. 1, показывающий возможные варианты поворота приводного вала.
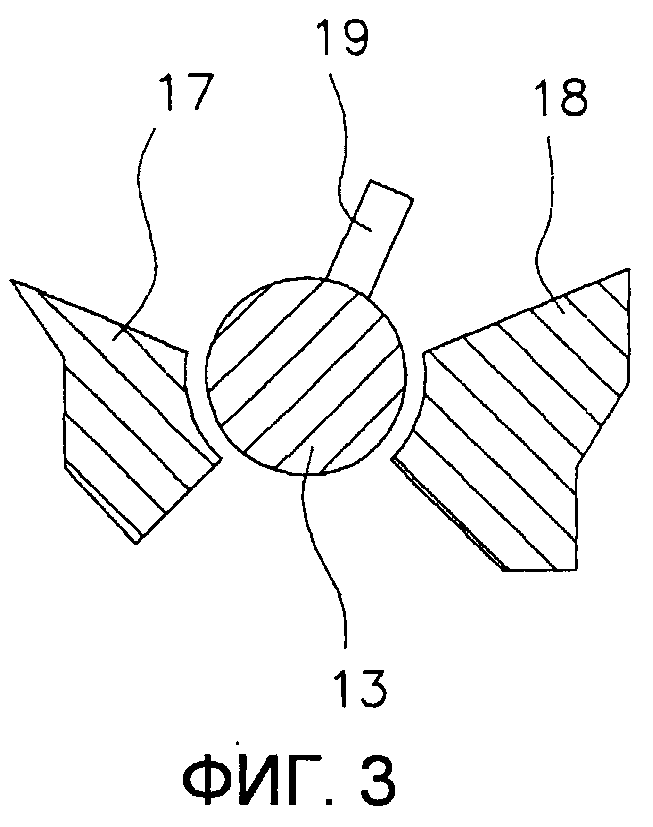
Фиг. 3 представляет собой разрез III-III на фиг. 1.
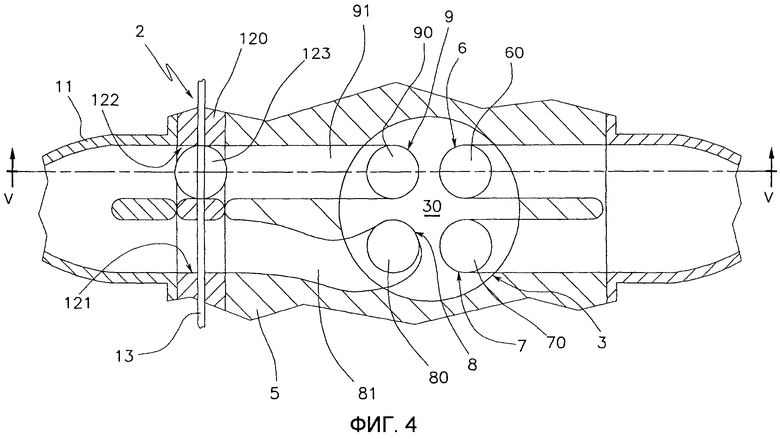
Фиг. 4 представляет собой фрагмент фиг. 1, показывающий один цилиндр.
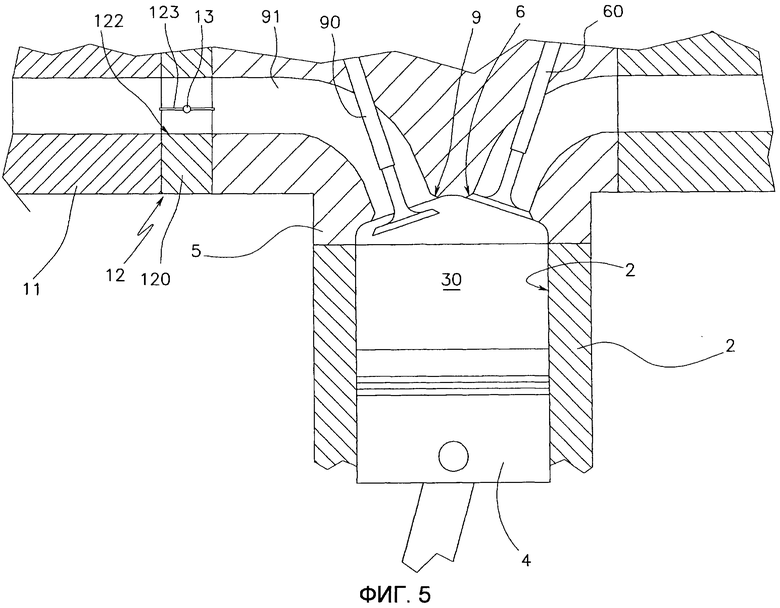
Фиг. 5 представляет собой разрез V-V на фиг. 3.
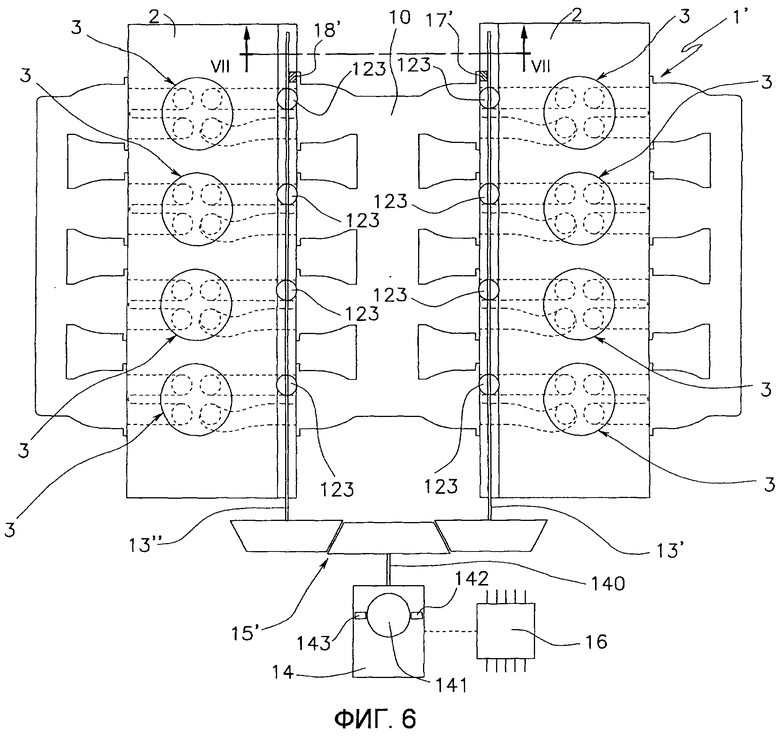
Фиг. 6 представляет собой схематичный вид двухблочного двигателя, снабженного системой впуска воздуха согласно настоящему изобретению.
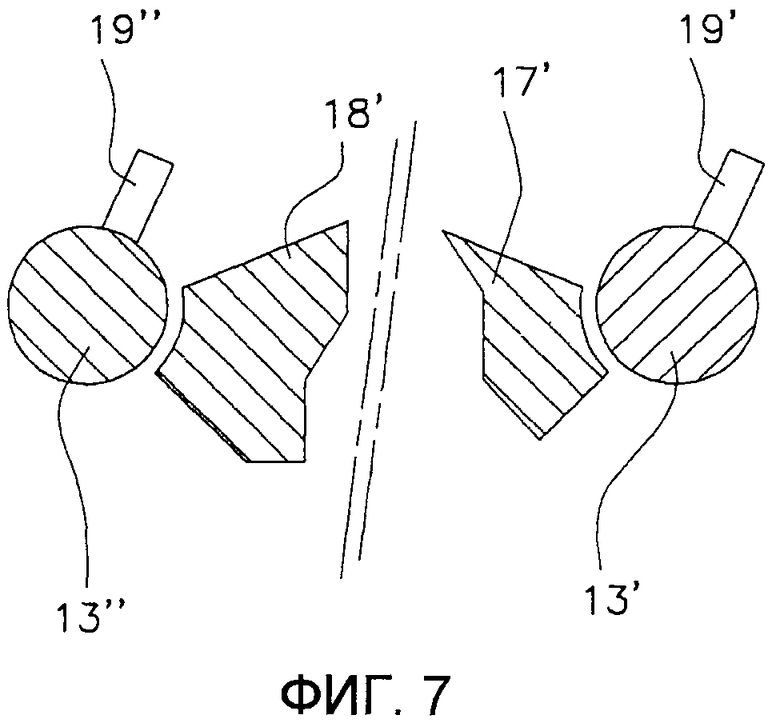
Фиг. 7 представляет собой разрез VII-VII на фиг. 6.
Подробное описание предпочтительных вариантов осуществления
На фиг. 1 схематично показан одноблочный дизельный двигатель 1 (например, однорядный двигатель).
По существу двигатель 1 содержит один блок 2 цилиндров, имеющий множество отверстий 3 цилиндра, оси которых выровнены в общей плоскости.
Головка 5 цилиндра закрывает верх каждого отверстия 3 цилиндра, образуя камеру 30 сгорания над поршнем 4.
Для каждого отверстия 3 цилиндра, головка 5 цилиндра содержит два выпускных канала 6 и 7 и два впускных канала 8 и 9, которые образованы четырьмя отверстиями в верхней поверхности камеры 30 сгорания (см. фиг. 4).
Выпускные каналы 6 и 7 открываются и закрываются соответствующими выпускными клапанами 60 и 70, и, подобным образом, впускные каналы 8 и 9 открываются и закрываются соответствующими впускными клапанами 80 и 90.
Входные и выпускные клапаны открываются и закрываются хорошо известным приводным механизмом.
Первый впускной канал 8 представляет собой впускной канал спирального типа, выполненный с возможностью сообщения вихревого перемещения протекающему через него воздуху, тем самым создавая турбулентность в камере 30 сгорания. Второй впускной канал 9 выполнен в виде обычного впускного канала прямого типа, имеющего низкое сопротивление потоку для уменьшения падения давления воздуха.
В головке 5 цилиндра выполнены два отдельных входных канала 81 и 91.
Входные каналы 81 и 91 сообщаются с первым впускным каналом 8 и вторым впускным каналом 9 соответственно.
Входные каналы 81 и 91 дополнительно сообщаются с входным коллектором 10 двигателя 1, через общий воздуховод 11, который прикреплен к головке 5 цилиндра.
Клапан 12 управления размещен между воздуховодом 11 и головкой 5 цилиндра.
Клапан 12 управления содержит корпус 120 клапана, имеющий два отдельных прохода 121 и 122, которые соединяют воздуховод 11 с воздушными каналами 81 и 91 соответственно.
Клапан 12 управления дополнительно содержит створку 123 управления завихрением, выполненную с возможностью поворота внутрь прохода 122 между открытым и закрытым положением.
Когда створка 123 управления завихрением находится в закрытом положении, входной канал 91 перекрыт, и соответственно большая часть входного воздуха течет в камеру 30 сгорания через входной канал 81 и завихряющий впускной канал 8.
Когда створка 123 управления завихрением находится в открытом положении, входной канал 91 открыт, и большая часть входного воздуха течет в камеру 30 сгорания через входной канал 91 и прямой впускной канал 9, из-за меньшего сопротивления потоку последнего в сравнении с завихряющим впускным каналом 8.
Как показано на фиг. 1, все створки 123 управления завихрением одноблочного двигателя 1 закреплены на общем поворотном валу 13, так называемом валу управления завихрением.
Вал 13 управления завихрением приводится электромеханическим приводом 14, для одновременного поворота створок 123 между открытым и закрытым положением.
Электромеханический привод 14 представляет собой привод поворотного типа, и поэтому содержит поворотный вал 140, так называемый приводной вал. Вал 13 управления завихрением механически связан с приводным валом 140 с помощью зубчатых колес 15 таким образом, что любой поворот приводного вала 140 соответствует повороту вала 13 управления завихрением и, тем самым, створок 123.
Вал 13 управления завихрением и зубчатые колеса 15 в общем образуют кинематическую цепь, позволяющую электромеханическому приводу 14 приводить в перемещение створки 123 управления завихрением.
В электромеханический привод 14 встроен датчик 141 положения для определения в режиме реального времени углового положения приводного вала 140.
Электромеханический привод 14 управляется блоком 16 управления двигателем на основе сигнала от датчика 141 положения и режима работы двигателя.
В качестве альтернативы электромеханический привод 14 может иметь встроенный контроллер на базе микропроцессора (не показан), который управляет поворотом приводного вала 140 на основе сигнала от датчика 141 положения и который соединен с блоком 16 управления двигателем для приема от последнего команд, указывающих, какое положение необходимо достичь согласно режимам работы двигателя.
По существу блок 16 управления двигателем определяет положение приводного вала 140 и режим работы двигателя, и когда двигатель работает с низкой или средней нагрузкой, подает команду электромеханическому приводу 14 повернуть створки 123 управления завихрением в закрытое положение, а когда двигатель работает с высокой нагрузкой, подает команду электромеханическому приводу 14 повернуть створки 123 управления завихрением в открытое положение. Как показано на фиг. 2, во время нормальной работы приводной вал выполнен с возможностью поворота в обоих направлениях между первым и вторым конечным положением, FP1 и FP2, которые соответствуют открытому и закрытому положениям створок управления завихрением соответственно.
Данные конечные положения FP1 и FP2 задают «номинальный угловой диапазон» NAR приводного вала 140.
В настоящем примере номинальный угловой диапазон NAR составляет около 90°. Для большей ясности, повороты приводного вала 140 в направлении первого конечного положения FP1 обозначены стрелкой А и далее будут называться поворотами в «переднем направлении».
Противоположные повороты приводного вала 140 в направлении второго конечного положения FP2 обозначены стрелкой В и далее будут называться поворотами в «обратном направлении».
Обычно электромеханический привод 14 содержит два внутренних механических стопора, которые схематично показаны на фиг. 1 позициями 142 и 143.
Внутренний механический стопор 142 непосредственно действует на приводной вал 140, чтобы механически ограничить поворот приводного вала 140 в переднем направлении А в первом предельном положении, обозначенном ЕР1 на фиг. 2.
Внутренний механический стопор 143 непосредственно действует на приводной вал 140, чтобы механически ограничить поворот приводного вала 140 в обратном направлении В во втором предельном положении, обозначенном ЕР2 на фиг. 2.
Данные предельные положения ЕР1 и ЕР2 задают «возможный угловой диапазон» PAR приводного вала 140.
Согласно изобретению внутренний механический стопор 142 должен позволять поворот приводного вала 140 в переднем направлении А за пределы первого конечного положения FP1.
Другими словами, первое предельное положение ЕР1, задаваемое внутренним механическим стопором 142, находится после первого конечного положения FP1 относительно переднего направления А поворота.
Аналогичным образом, внутренний механический стопор 143 должен позволять поворот приводного вала 140 в обратном направлении В за пределы второго конечного положения FP2.
Другими словами, второе предельное положение ЕР2, задаваемое внутренним механическим стопором 143, находится после второго конечного положения FP1 относительно обратного направления В поворота.
Таким образом, номинальный угловой диапазон NAR приводного вала 140 должен являться поддиапазоном возможного углового диапазона PAR, задаваемого внутренними механическими стопорами 142 и 143.
В настоящем примере возможный угловой диапазон PAR составляет около 180°.
Внутренние механические стопоры 142 и 143 по существу известны и не описаны здесь более подробно.
Как показано на фиг. 1, изобретение предлагает два внешних механических стопора 17 и 18, связанные с кинематической цепью, соединяющей приводной вал 140 со створками 123 управления завихрением.
Механический стопор 18 непосредственно действует на вал 13 управления завихрением, чтобы тем самым косвенно ограничить поворот приводного вала 140 в переднем направлении А в первом контрольном положении, обозначенном СР1 на фиг. 2.
Аналогичным образом, механический стопор 17 непосредственно действует на вал 13 управления завихрением, чтобы тем самым косвенно ограничить поворот приводного вала 140 в обратном направлении В во втором контрольном положении, обозначенном СР2 на фиг. 2.
Данные контрольные положения СР1 и СР2 задают «контрольный угловой диапазон» CAR приводного вала 140.
Согласно изобретению внешний механический стопор 18 должен обеспечить поворот приводного вала 140 в переднем направлении А в положение перед или после первого конечного положения FP1, но должен остановить приводной вал перед тем, как он достигнет первого предельного положения ЕР1, заданного внутренним механическим стопором 142. Аналогичным образом, внешний механический стопор 17 должен обеспечить поворот приводного вала 140 в обратном направлении А в положение перед или после второго конечного положения FP2, но должен остановить приводной вал перед тем, как он достигнет второго предельного положения ЕР2, заданного внутренним механическим стопором 143.
По существу, первое контрольное положение СР1 должно располагаться между первым конечным положением FP1 и первым предельным положением ЕР1, а второе контрольное положение СР1 должно располагаться между вторым конечным положением FP2 и вторым предельным положением ЕР2.
В качестве альтернативы первое контрольное положение СР1 может совпадать с первым конечным положением FP1, и/или второе контрольное положение СР2 может совпадать со вторым конечным положением FP2.
Поэтому контрольный угловой диапазон CAR должен являться поддиапазоном возможного углового диапазона PAR и должен совпадать или включать в себя номинальный угловой диапазон NAR.
Как показано на фиг. 3, внешние механические стопоры 17 и 18 могут быть выполнены в виде двух выступающих элементов, выполненных за одно целое с входным коллектором 10, и одного выступающего элемента 19, выполненного за одно целое с валом 13 управления завихрением, предназначенного для контактирования с выступающим элементом 17 при повороте приводного вала 140 в переднем направлении, и контактирования с выступающим элементом 18 при повороте приводного вала 140 в обратном направлении.
Для проверки целостности кинематической цепи, соединяющей приводной вал 140 со створками 123 управления завихрением, изобретение предлагает реализовать в блоке 16 управления двигателем следующую процедуру диагностирования.
Блок 16 управления двигателем выдает команду электромеханическому приводу 14 на поворот приводного вала 140 в переднем направлении А к первому предельному положению ЕР1, заданному внутренним механическим стопором 142.
С помощью датчика 141 положения, встроенного в электромеханический привод 14, блок 16 управления двигателем определяет угловое положение приводного вала 140, когда он останавливается.
Если угловое положение приводного вала 140 соответствует первому контрольному положению СР1, заданному внешним механическим стопором 18, тогда кинематическая цепь, соединяющая приводной вал 140 со створками 123 управления завихрением, является целостной и правильно работающей.
И наоборот, если угловое положение приводного вала 140 фактически соответствует первому предельному положению ЕР1, заданному внутренним механическим стопором 142, то кинематическая цепь нарушена, и системой 16 управления двигателем может быть выдан сигнал неисправности. Этот контроль должен быть достаточен для проверки целостности кинематической цепи, но, для лучшей достоверности проверки, процедура диагностирования предпочтительно предусматривает повторение контроля также и в противоположном направлении поворота.
Поэтому блок 16 управления двигателем подает команду электромеханическому приводу 14 на поворот приводного вала 140 в обратном направлении В ко второму предельному положению ЕР2, заданному внутренним механическим стопором 143. С помощью датчика 141 положения, встроенного в электромеханический привод 14, блок 16 управления двигателем определяет угловое положение приводного вала 140, когда он останавливается.
Если угловое положение приводного вала 140 соответствует второму контрольному положению СР2, заданному внешним механическим стопором 17, то кинематическая цепь, соединяющая приводной вал 140 со створками 123 управления завихрением, является целостной и правильно работающей.
И наоборот, если угловое положение приводного вала 140 фактически соответствует второму предельному положению ЕР2, заданному внутренним механическим стопором 143, то кинематическая цепь нарушена и системой 16 управления двигателем может быть выдан сигнал неисправности.
На фиг. 6 схематично показан двухблочный дизельный двигатель 1' (например, V-образный двигатель).
По существу двигатель 1' содержит два отдельных блока 2 цилиндров.
Каждый блок 2 цилиндров имеет соответствующее множество отверстий 3 цилиндра, которые в общем выровнены в двух отдельных плоскостях.
Каждое отверстие 3 цилиндра по существу идентично показанному на фиг. 3 и фиг. 4.
По существу каждое отверстие 3 цилиндра имеет соответствующий поршень 4 возвратно-поступательного перемещения и закрыто сверху головкой 5 цилиндра, которая образует камеру 30 сгорания над поршнем 4. Камера 30 сгорания имеет клапан 12 управления, который удерживается между соответствующим воздуховодом 11 входного коллектора 10 и головкой 5 цилиндра.
Таким образом, двухблочный двигатель 1' в общем содержит две отдельные группы створок 123 управления завихрением, которые связаны с соответствующим блоком 2 двигателя.
Створки 123 управления завихрением каждой группы закреплены на общем поворотном валу управления завихрением, обозначенным позициями 13' и 13'' соответственно. Валы 13' и 13'' управления завихрением приводятся общим электромеханическим приводом 14, выполненным с возможностью одновременного поворота всех створок 123 управления завихрением между открытым и закрытым положением. Электромеханический привод 14 идентичен описанному выше для одноблочного двигателя 1.
Валы 13' и 13'' управления завихрением механически связаны с приводным валом 140 с помощью зубчатых колес 15' таким образом, что любой поворот приводного вала 140 соответствует одновременному повороту обоих валов 13' и 13'' управления завихрением и тем самым створок 123 управления завихрением.
Валы 13' и 13'' управления завихрением и зубчатые колеса 15' образуют кинематическую цепь, позволяющую электромеханическому приводу 14 приводить створки 123 управления завихрением.
Как было описано выше, электромеханический привод 14 содержит встроенный датчик 141 положения для определения в режиме реального времени углового положения приводного вала 140.
Электромеханический привод 14 управляется блоком 16 управления двигателем на основе сигнала от датчика 141 положения и режима работы двигателя.
В качестве альтернативы электромеханический привод 14 может иметь встроенный контроллер на базе микропроцессора, который управляет поворотом приводного вала 140 и который соединен с блоком 16 управления двигателем
Во время нормальной работы приводной вал 140 управляется командами для поворота в обоих направлениях между первым и вторым конечным положением, FP1 и FP2, которые соответствуют открытому и закрытому положениям створок 123 управления завихрением соответственно.
Электромеханический привод 14 дополнительно содержит два внутренних механических стопора 142 и 143, которые непосредственно действуют на приводной вал 140, чтобы механически ограничить поворот последнего между первым и вторым предельными положениями ЕР1 и ЕР2. Задание предельных положений ЕР1 и ЕР2 относительно конечных положений FP1 и FP2 идентично описанному ранее для одноблочного двигателя 1.
Предусмотрены два внешних механических стопора 17' и 18', связанных с кинематической цепью, соединяющей приводной вал 140 со створками 123 управления завихрением.
В данном варианте осуществления внешний механический стопор 17' непосредственно действует на вал 13' управления завихрением, чтобы тем самым косвенно ограничить поворот приводного вала 140 в переднем направлении А в первом контрольном положении СР1.
Внешний механический стопор 18' непосредственно действует на вал 13'' управления завихрением, чтобы тем самым косвенно ограничивать поворот приводного вала 140 в обратном направлении В во втором контрольном положении СР2. Задание контрольных положений СР1 и СР2 относительно конечных положений FP1 и FP2 и предельных положений ЕР1 и ЕР2 идентично описанному ранее для одноблочного двигателя 1. Как показано на фиг. 7, внешний механический стопор 18' может быть выполнен в виде одного выступающего элемента, выполненного за одно целое с входным коллектором 10, и выступающего элемента 19'', выполненного за одно целое с соответствующим валом 13'' управления завихрением, предназначенного для контактирования с выступающим элементом 18' при повороте приводного вала 140 в обратном направлении.
Аналогичным образом внешний механический стопор 17' может быть выполнен в виде одного выступающего элемента, выполненного за одно целое с входным коллектором 10, и выступающего элемента 19', выполненного за одно целое с соответствующим валом 13' управления завихрением, предназначенного для контактирования с выступающим элементом 17' при повороте приводного вала 140 в переднем направлении.
Во время процедуры диагностики блок 16 управления двигателем подает команду электромеханическому приводу 14 на поворот приводного вала 140 в переднем направлении А к первому предельному положению ЕР1, заданному внутренним механическим стопором 142.
С помощью датчика 141 положения, встроенного в электромеханический привод 14, блок 16 управления двигателем определяет угловое положение приводного вала 140, когда он останавливается.
Если угловое положение приводного вала 140 соответствует первому контрольному положению СР1, заданному внешним механическим стопором 17', то кинематическая цепь, соединяющая приводной вал 140 со створками 123 управления завихрением вала 13' управления завихрением, является целостной и правильно работающей.
И наоборот, если угловое положение приводного вала 140 фактически соответствует первому предельному положению ЕР1, заданному внутренним механическим стопором 142, то кинематическая цепь нарушена, и системой 16 управления двигателем может быть выдан сигнал неисправности. Процедура диагностирования дополнительно предусматривает повторение контроля также и в противоположном направлении поворота.
Блок 16 управления двигателем подает команду электромеханическому приводу 14 на поворот приводного вала 140 в обратном направлении В ко второму предельному положению ЕР2, заданному внутренним механическим стопором 143.
С помощью датчика 141 положения, встроенного в электромеханический привод 14, блок 16 управления двигателем определяет угловое положение приводного вала 140, когда он останавливается.
Если угловое положение приводного вала 140 соответствует второму контрольному положению СР2, заданному внешним механическим стопором 18', то кинематическая цепь, соединяющая приводной вал 140 со створками 123 управления завихрением вала 13'' управления завихрением является целостной и правильно работающей.
И наоборот, если угловое положение приводного вала 140 фактически соответствует второму предельному положению ЕР2, заданному внутренним механическим стопором 143, то кинематическая цепь нарушена и системой 16 управления двигателем может быть выдан сигнал неисправности.
Хотя в предыдущих вариантах осуществления электромеханический привод 14 являлся приводом поворотного типа, электромеханический привод 14 может быть приводом линейного типа, например, приводной вал 140 может быть валом возвратно-поступательного перемещения, механически связанным с валом (валами) управления завихрением с помощью рычагов.
Хотя настоящее изобретение было описано в отношении конкретных предпочтительных вариантов осуществления и конкретных областей применения, понятно, что приведенное выше описание приведено только посредством примера, а не ограничения. Специалистам в данной области техники будет очевидно множество дополнений описанных конкретных вариантов осуществления, не выходящих за рамки объема приложенной формулы изобретения. Поэтому изобретение не ограничивается раскрытыми вариантами осуществления, а охватывает весь объем, определенный в приложенной формуле изобретения.
Изобретение может быть использовано для диагностирования работоспособности системы завихрения воздуха во впускном трубопроводе двигателя (1) внутреннего сгорания (ДВС). Способ заключается в определении положения подвижного вала (140) привода (ПВП) с использованием механического стопора (18) для действия на элемент (13) кинематической цепи, чтобы ограничить перемещение ПВП в первом направлении (А) в первом контрольном положении (СР1) и проверку с помощью детектирующего средства (141) определения положения, остановился ли ПВП в первом контрольном положении (СР1) или вышел за его пределы. Приведены дополнительные приемы способа. Описано устройство для реализации способа. Технический результат заключается в повышении точности диагностирования работоспособности. 2 н. и 12 з.п. ф-лы.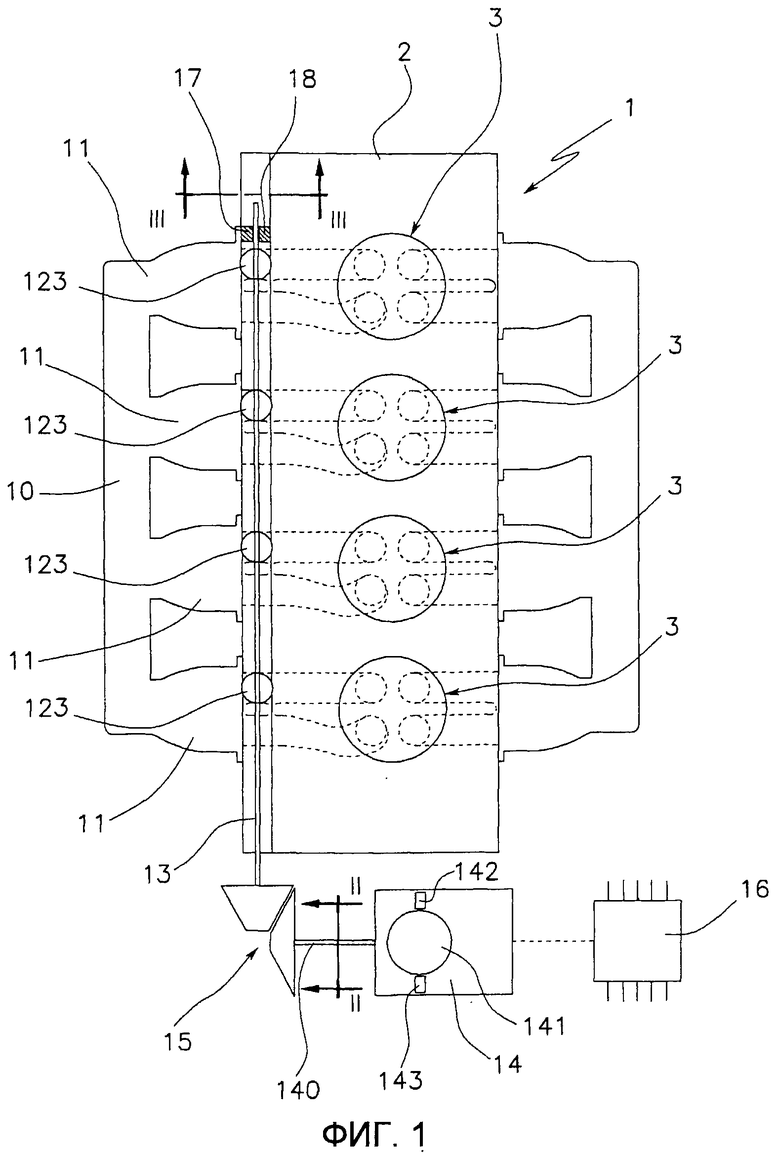
1. Способ диагностирования целостности системы создания завихрения двигателя (1) внутреннего сгорания, содержащей:
множество элементов (123) управления завихрением, расположенных отдельно друг от друга в соответствующем воздушном канале (121), соединяющем входной коллектор (10) двигателя (1) с впускным каналом (9) камеры (30) сгорания двигателя,
привод (14) с подвижным валом (140),
кинематическую цепь (13, 15) для механического соединения элементов (123) управления завихрением с подвижным валом (140) привода,
средство (16) управления приводом для нормального перемещения подвижного вала (140) привода в первом направлении (А) к первому конечному положению (FP1) и во втором противоположном направлении (В) ко второму конечному положению (FP2), и
детектирующее средство (141) привода для определения положения подвижного вала (140) привода,
отличающийся тем, что способ включает в себя:
обеспечение по меньшей мере одного механического стопора (18) для действия на один элемент (13) кинематической цепи, чтобы ограничить перемещение подвижного вала (140) привода в первом направлении (А) в первом контрольном положении (СР1), совпадающем или находящемся после первого конечного положения (FP1),
подачу команды на средство (16) управления приводом для перемещения подвижного вала (140) привода в первом направлении (A) к первому контрольному положению (СР1), и
проверку с помощью средства (141) определения положения привода, остановился ли подвижный вал (140) привода в первом контрольном положении (СР1) или вышел за его пределы.
2. Способ по п. 1, который дополнительно включает в себя:
обеспечение по меньшей мере второго механического стопора (17) для действия на один элемент (13) кинематической цепи, чтобы ограничить перемещение подвижного вала (140) привода во втором направлении (В) во втором контрольном положении (СР2), совпадающем или находящемся после второго конечного положения (FP2),
подачу команды на средство (16) управления приводом для перемещения подвижного вала (140) привода во втором направлении (B) ко второму контрольному положению (СР2), и
проверку с помощью средства (141) определения положения привода, остановился ли подвижный вал (140) привода во втором контрольном положении (СР2) или вышел за его пределы.
3. Способ по п. 1, в котором кинематическая цепь содержит один поворотный вал управления завихрением, на котором закреплены все элементы (123) управления завихрением, причем способ дополнительно включает этап обеспечения первого механического стопора (18) для действия на один вал управления завихрением.
4. Способ по п. 2 или п. 3, дополнительно включающий этап обеспечения второго механического стопора (17) для действия на один вал управления завихрением.
5. Способ по п. 2, в котором кинематическая цепь содержит два отдельных поворотных вала (13′, 13″) управления завихрением, на каждом из которых закреплена соответствующая группа элементов (123) управления завихрением, причем способ дополнительно включает этапы: обеспечения первого механического стопора (17) для действия на один вал (13′) управления завихрением, и обеспечения второго механического стопора (18) для действия на другой вал (13″) управления завихрением.
6. Способ по п. 1, в котором привод (14) представляет собой привод поворотного типа, подвижный вал (140) привода представляет собой поворотный вал, а средство (141) определения положения дополнительно выполняют с возможностью определения углового положения поворотного вала (140) привода.
7. Способ по п. 1, в котором привод представляет собой привод линейного типа, подвижный вал привода представляет собой вал возвратно-поступательного перемещения, а средство определения положения дополнительно выполняют с возможностью определения линейного положения вала возвратно-поступательного перемещения привода.
8. Система двигателя внутреннего сгорания, содержащая двигатель и систему создания завихрения двигателя, содержащую:
множество элементов (123) управления завихрением, расположенных отдельно друг от друга в соответствующем воздушном канале (121), соединяющем входной коллектор (10) двигателя (1) с впускным каналом (9) камеры (30) сгорания двигателя,
привод (14) с подвижным валом (140),
кинематическую цепь (13, 15) для механического соединения элементов (123) управления завихрением с подвижным валом (140) привода,
средство (16) управления приводом для нормального перемещения подвижного вала (140) привода в первом направлении (А) к первому конечному положению (FP1) и во втором противоположном направлении (В) ко второму конечному положению (FP2), и
детектирующее средство (141) привода для определения положения подвижного вала (140) привода,
отличающаяся тем, что система создания завихрения дополнительно содержит:
по меньшей мере один механический стопор (18) для действия на один элемент (13) кинематической цепи, чтобы ограничить перемещение подвижного вала (140) привода в первом направлении (A) в первом контрольном положении (СР1), совпадающем или находящемся после первого конечного положения (FP1),
средство (16) управления приводом выполнено с возможностью перемещения подвижного вала (14 0) привода в первом направлении (А) к первому контрольному положению (СР1) и проверки с помощью детектирующего средства (141) определения положения, остановился ли подвижный вал (140) привода в первом контрольном положении (СР1) или вышел за его пределы.
9. Система по п. 8, в которой система создания завихрения дополнительно содержит:
по меньшей мере один механический стопор (17) для действия на один элемент (13) кинематической цепи, чтобы ограничить перемещение подвижного вала (140) привода во втором направлении (B) во втором контрольном положении (СР2), совпадающем или находящемся после второго конечного положения (FP2),
средство (16) управления приводом выполнено с возможностью перемещения подвижного вала (140) привода во втором направлении (В) ко второму контрольному положению (СР2) и проверки с помощью детектирующего средства (141) определения положения, остановился ли подвижный вал (14 0) привода во втором контрольном положении (СР2) или вышел за его пределы.
10. Система по п. 8, в которой кинематическая цепь содержит один поворотный вал (13) управления завихрением, на котором закреплены все элементы (123) управления завихрением, причем первый механический стопор (18) предназначен для действия на один вал управления завихрением.
11. Система по п. 9 или 10, в которой второй механический стопор (17) предназначен для действия на один вал управления завихрением.
12. Система по п. 9, в которой кинематическая цепь содержит два отдельных поворотных вала (13′, 13″) управления завихрением, на каждом из которых закреплена соответствующая группа элементов (123) управления завихрением, причем первый механический стопор (17′) предназначен для действия на один вал (13′) управления завихрением, а второй механический стопор (18) предназначен для действия на другой вал (13″) управления завихрением.
13. Система по п. 8, в которой привод (14) представляет собой привод поворотного типа, подвижный вал (140) привода представляет собой поворотный вал, а детектирующее средство (141) определения положения выполнено с возможностью определения углового положения поворотного вала (140) привода.
14. Система по п. 8, в которой привод представляет собой привод линейного типа, подвижный вал привода представляет собой вал возвратно-поступательного перемещения, а детектирующее средство определения положения выполнено с возможностью определения линейного положения вала возвратно-поступательного перемещения привода.
| US 2010018496 A1, 28.01.2010 | |||
| US 5231964 A, 03.08.1993 | |||
| US 5267543 A, 07.12.1993 | |||
| Устройство для программированного набора номера | 1985 |
|
SU1270905A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЭЛЕМЕНТОВ ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2374613C2 |

