Автолет – это транспортное средство двойного назначения, выполняющее функции самолета и автомобиля. Известны аэромобили, автолеты, автопланеры и т.п. транспортные средства, см. патенты РФ № 2385807, 2128588, 2468933,2564942, 2561684, 2531538,2616451, которые могут двигаться по автомобильным дорогам до взлетно-посадочных площадок, с которых они взлетают и летят до пункта назначения, где производят посадку и двигаются далее по дорогам. Они состоят из автомобиля со складывающимися, различным способом, крыльями, хвостовыми балками, оперением и авиадвигателей, либо имеют съемные части аэроплана, которые перед транспортировкой по автодороге укладывают на специальные крепления на автомобиле или на прицеп.
Эти комбинированные транспортные средства имеют следующие недостатки:
1) при движении по автодорогам они везут на себе части самолета (аэроплан), как следствие:
- увеличение габаритов;
- уменьшение скорости и грузоподъемности;
- увеличение расхода горючего;
2) при движении по дорогам с плохим покрытием элементы аэроплана подвергаются сильной тряске, что отрицательно влияет на состояние приборов, деталей, механизмов;
3) по бездорожью такие средства не могут передвигаться вообще, либо двигаются с большими проблемами или посторонней помощью;
4) средства со съемным аэропланом требуют достаточно много времени на сборку-разборку.
Россия имеет большую территорию с малонаселенными регионами сибири, крайнего севера, дальнего востока, с которыми отсутствует железнодорожное и автомобильное сообщение. В некоторые населенные пункты и базы можно добраться только речным транспортом, по зимним дорогам и воздушным транспортом.
Автолет предназначен для транспортного сообщения с такими пунктами назначения и может быть использован для перевозки пассажиров и грузов и специальными службами: пожарной, МЧС, скорой медицинской помощи, МВД, ФСБ, министерства обороны, администрации РФ и регионов, лесотехнической, охотоведческой, рыбнадзора, геологической, гидрологической, метеорологической, научно-исследовательской, СМИ, частными предпринимателями и лицами и т.п.
Преимущество перед вертолетами - экономичность.
Вместимость автолета 4-10 человек, вес груза 0.5-1.5 т, взлетно-посадочная площадка ширина 10 м, длина 30-60 м, скорость полета 100-500 км/ч, скорость движения по автодорогам с усовершенствованным покрытием 100-150 км/ч, возможность движения по бездорожью, время сборки-разборки 1-5 минут.
Цель изобретения совместить функции внедорожника и самолета в одном аппарате.
Цель достигается тем, что автолет, содержащий автомобиль, крылья, авиадвигатели, хвостовые балки и оперение, состоит из автомобиля и аэроплана, объединенных в одно целое стыковочными устройствами, выполненными в виде двух усеченных конусов, наружные крепятся к аэроплану, внутренние к автомобилю, и имеют возможность входить в наружные конуса и выходить из них. Причем блокировка и объединение автомобиля и аэроплана в автолет выполнена в виде механического, электромеханического замка с соединением силовых и управляющих сетей в виде розетка - разъем. Хвостовые балки аэроплана содержат передние и задние телескопические опоры, имеющие возможность выпускаться и убираться с помощью гидравлических, электромеханических, пневматических систем, которые также имеют возможность выдвигать и втягивать подвижные части опор с компенсацией неровностей стояночной площадки и веса аэроплана.
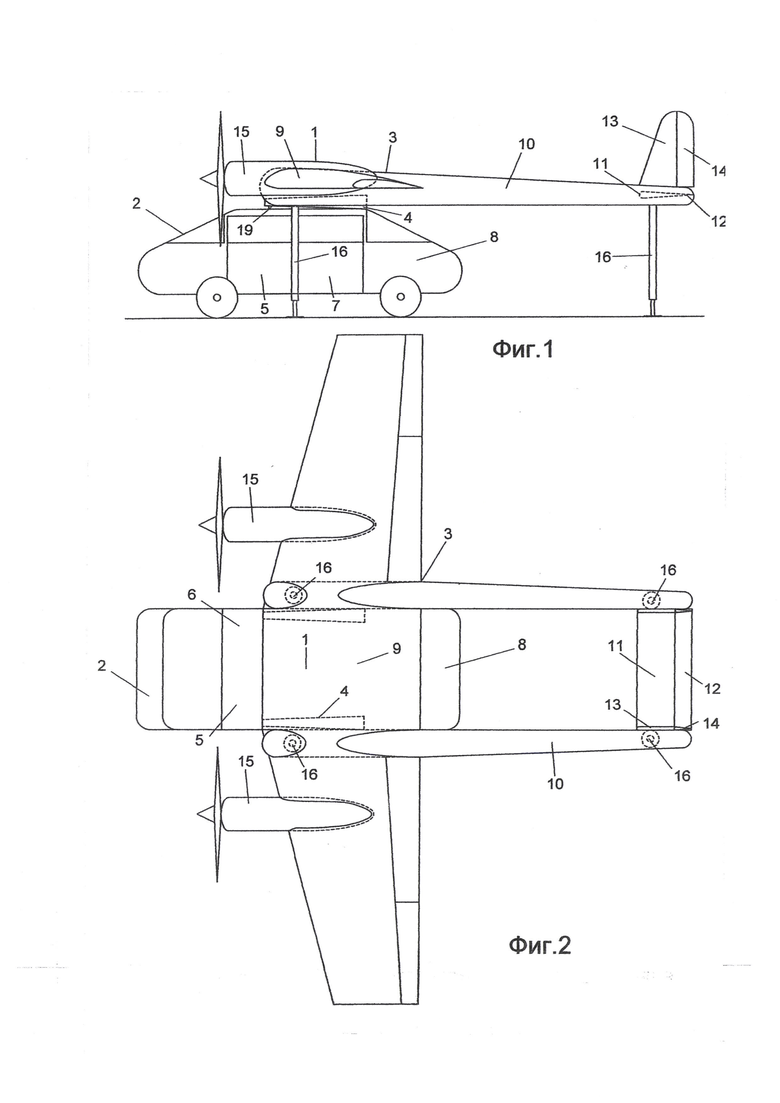
На фиг. 1 изображен автолет на стояночной площадке с выпущенными стояночными опорами, вид сбоку; на фиг. 2 – автолет, вид сверху; на фиг. 3 – автолет, вид спереди; на фиг. 4 – разрез простого механического замка стыковочного устройства; на фиг. 5 – разрез В-В на фиг. 6, 7 усложненного механического замка стыковочного устройства; на фиг. 6 – разрез А-А на фиг. 5; на фиг. 7 – разрез Б-Б на фиг. 5; на фиг. 8 – разрез электромеханического замка; на фиг. 9 – схематический разрез хвостовой балки с гидравлическим приводом стояночных опор; на фиг. 10 – схема системы управления выпуском и уборкой стояночных опор из хвостовой балки; на фиг. 11 – разрез золотника на фиг. 10, 12; на фиг. 12 – схема системы управления выдвижением и втягиванием нижней части телескопической опоры; на фиг. 13 – кинематическая схема электромеханической системы управления выпуском - уборкой и выдвижением - втягиванием телескопической опоры; на фиг. 14 – разрез опорной части телескопической опоры с электромеханической системой управления; на фиг. 15 – разрез телескопической опоры в верхней части выдвижной опоры с пневматической системой управления.
Автолет 1, см. фиг. 1-3, состоит из двух основных частей автомобиля 2 и аэроплана 3, которые соединяются между собой с помощью стыковочных устройств 4.
Автомобиль 2 имеет место водителя 5, находящееся в передней части салона с левой стороны со всеми необходимыми приборами, кнопками, рычагами, рулем, педалями и др. механизмами управления автомобилем. В передней части салона с правой стороны расположено место пилота 6 с приборами, штурвалом, педалями, кнопками, рычагами и пр. механизмами управления самолетом. В средней части салона имеются места для пассажиров 7, а в задней части отсек для груза 8. На крыше салона слева и справа жестко крепятся к каркасу автомобиля 2 нижние части стыковочных устройств 4.
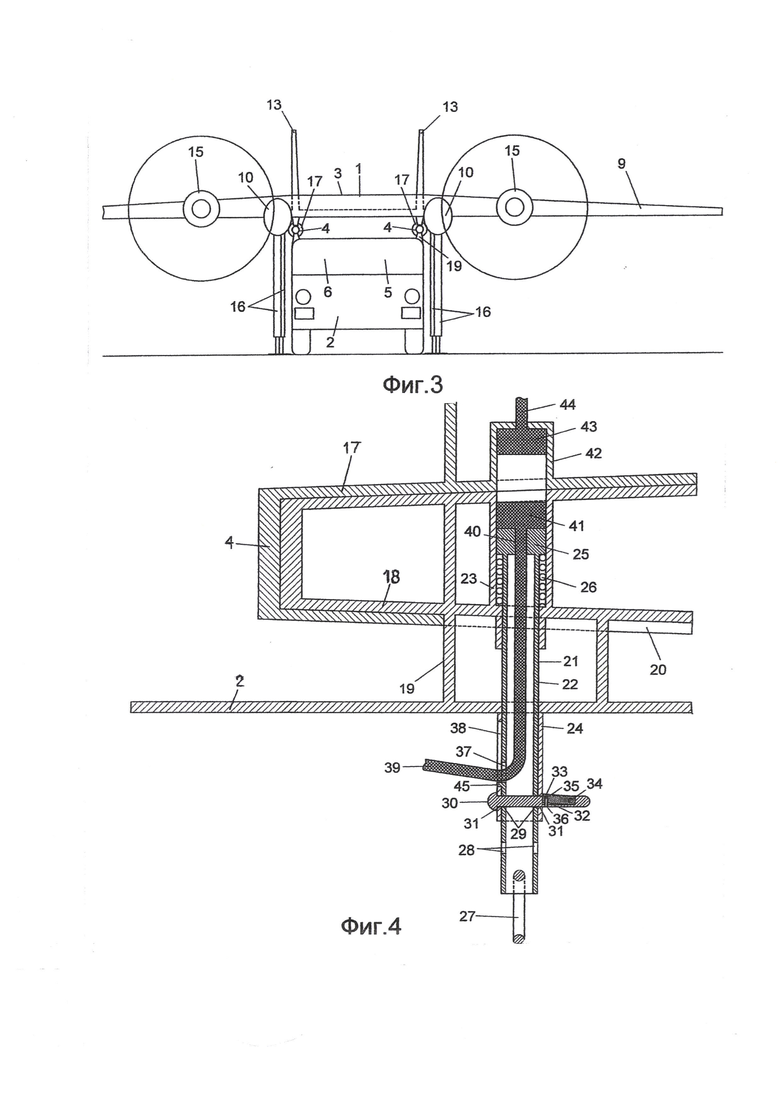
Аэроплан 3 состоит из крыла 9, к которому жестко крепятся две хвостовые балки 10, соединенные стабилизатором 11 с рулем высоты 12. К балкам 10 и стабилизатору 11 крепятся два киля 13 с рулями поворота 14. На крыле 9 слева и справа от хвостовых балок 10 установлены авиационные двигатели 15, а в нижней части крыла 9 и нижней боковой части хвостовых балок 10 крепятся наружные части стыковочных устройств 4. В передней и задней частях хвостовых балок 10 установлены телескопические стояночные опоры 16 аэроплана 3 с возможностью уборки в балки 10. Стыковочные устройства 4 состоят, см. фиг. 3, 4-8, из наружных пустотелых усеченных конусов 17, жестко крепящихся к нижней поверхности крыла 9 и боковой хвостовых балок 10, и внутренних 18, соосно устроенных с наружными, и жестко крепящихся с помощью кронштейнов 19 к каркасу автомобиля 2. В нижней части наружных конусов 17 выполнены разрезы 20, в которых имеют возможность движения кронштейны 19.
Далее представлены три варианта стыковочных устройств 4 с механическим и электромеханическим приводом замка и соединения силовых и управляющих сетей автолета.
Механический простой.
Замок 21, см. фиг. 4, устроен внутри кронштейна 19 и внутреннего конуса 18 и состоит из подвижной трубки 22, установленной внутри трубки 23, жестко закрепленной внутри конуса 18, и трубки 24 укрепленной на каркасе автомобиля 2. В верхнем конце трубки 22 жестко крепится стопорное кольцо 25, в которое упирается пружина 26. На нижнем конце трубка 22 имеет вытяжное кольцо 27 и отверстия 28, а несколько выше в отверстия 29 установлен стопорный болт 30, проходящий также в отверстия 31 трубки 24. Стопорный болт 30 имеет прорезь 32, в которую вставлена стопорная пластина 33 укрепленная на оси 34 и подпружиненная пружиной 35, установленной на винте 36. В трубках 22 и 24 выполнены прорези 37 и 38, соответственно, через которые проходит кабель 39 силовой, управляющей сети внутрь трубки 22. Далее через отверстие 40 в стопорном кольце 25 к, укрепленному на нем, разъему 41. В трубке 42, жестко закрепленной на конусе 17, установлена розетка 43 с кабелем 44, а к трубке 22 жестко крепится шип 45, входящий в прорезь 38. Количество замков 21 зависит от конструкции и количества кабелей силовых и управляющих сетей. Механический усложненный.
Замок 46, см. фиг. 5, 6, 7, устроен в передней части конусов 17,18, внутри передних кронштейнов 19 и автомобиля 2, и состоит из нескольких розеток 47, с подходящими к ним кабелями 48, жестко закрепленных во внутренней перегородке 49 конуса 17. Напротив розеток 47 на передней стенке конуса 18 и внутренней стенке 50 жестко закреплены разъемы 51, с подходящими к ним кабелями 52. Блокирующая часть замка состоит из оси 53, жестко укрепленной в передней стенке конуса 17 и внутренней перегородке 49, на конце которой находится стопор 54, имеющий возможность проходить через прорезь 55 стопорной шайбы 56. Последняя имеет вал 57, укрепленный в стенке 50, на другом конце которого жестко прикреплен шкив 58, гибкой передачей 59 соединенный со шкивом 60, составляющим единое целое с валом 61 и рычагом 62. Вал 61 укреплен в кронштейне 63 с возможностью вращения, последний крепится к кронштейну 19. Рычаг 62 имеет возможность перемещения из вертикального положения в горизонтальное от стопорного шипа 64 до стопорного шипа 65, укрепленных на кронштейнах 66 и 67, которые установлены на корпусе автомобиля 2. Кронштейны 66 и 67 имеют отверстия, куда вставляются стопорные болты 68 и 69.
Электромеханический.
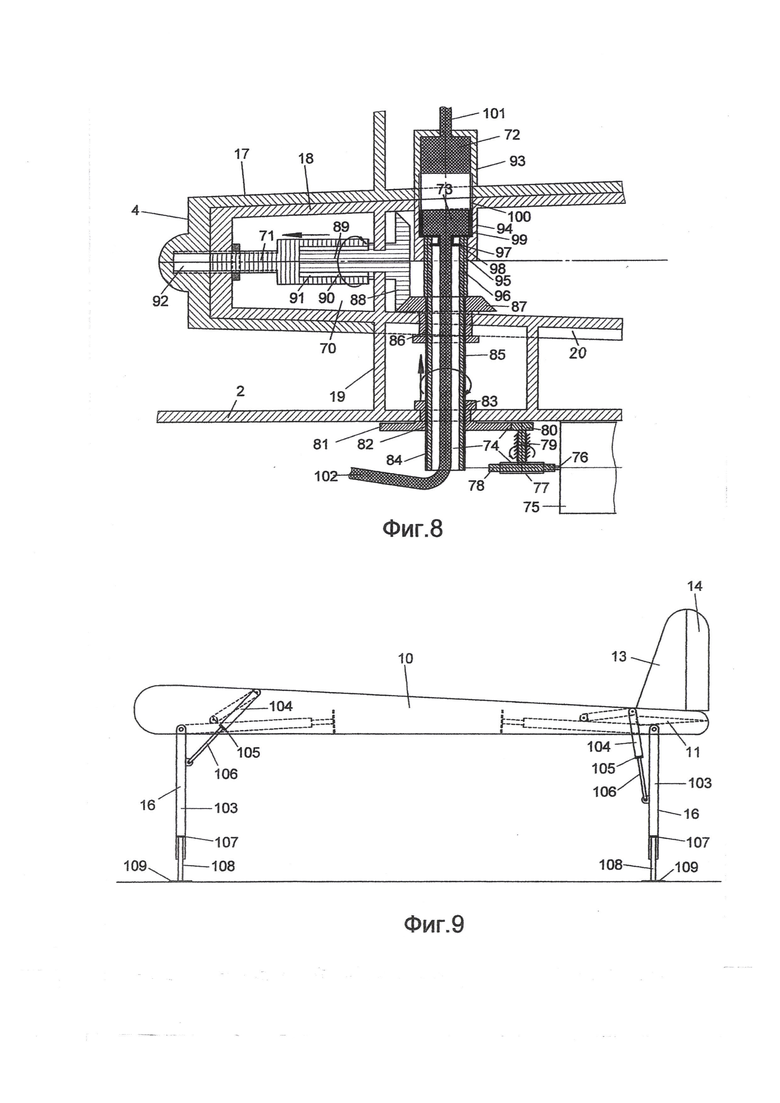
Замок 70, см. разрез на фиг. 8, расположен в передней части конусов 17, 18, внутри передних кронштейнов 19 и автомобиля 2. Он состоит из стягивающего болта 71, розетки 72, разъема 73 и управляющего механизма 74, имеющего электродвигатель 75, вал 76 которого соединен с червяком 77, входящим в зацепление с червячным колесом 78, жестко соединенным валом 79 с шестерней 80. Последняя входит в зацепление с зубчатым колесом 81 укрепленным в корпусе автомобиля 2, которое имеет по оси цилиндрическое отверстие 82 с шлицами 83, входящими в зацепление с шлицами 84 трубки 85. Шлицы 86 конической шестерни 87 также входят в зацепление с шлицами 84, последняя с конической шестерней 88, укрепленной на валу 89, имеющем шлицы 90 входящие в шлицы 91, устроенные в головке болта 71, имеющего возможность ввинчиваться в отверстие 92 в стенке конуса 17. Розетка 72 устроена в трубке 93, жестко закрепленной в конусе 17, а трубка 94 жестко крепится в конусе 18 и внутри содержит резьбу 95, внутрь последней имеет возможность ввинчиваться трубка 85 с резьбой 96. Разъем 73 с помощью кольца 97 и паза 98 крепится к трубке 85. Выступ 99 разъема 73 входит в паз 100 выполненный на внутренней поверхности трубок 93, 94 и отверстий в конусах 17, 18, а кабели 101 и 102 крепятся к розетке 72 и разъему 73, соответственно.
Стояночные опоры 16 представлены тремя вариантами приводов: гидравлическим, электромеханическим и пневматическим.
Гидравлические стояночные опоры 16 для аэроплана 3, см. фиг. 9-12, состоят из выпускных опор 103, шарнирно укрепленных в хвостовой балке 10 и имеющих возможность поворачиваться из горизонтального положения в вертикальное. К хвостовой балке 10 шарнирно крепится гидравлический цилиндр 104, внутри которого находится поршень 105 жестко соединенный со штоком 106, конец которого шарнирно соединен с выпускной опорой 103. Последняя выполнена в виде цилиндра, внутри которого находится поршень 107, жестко соединенный с выдвижной опорой 108, имеющей на конце опорную пластину 109.
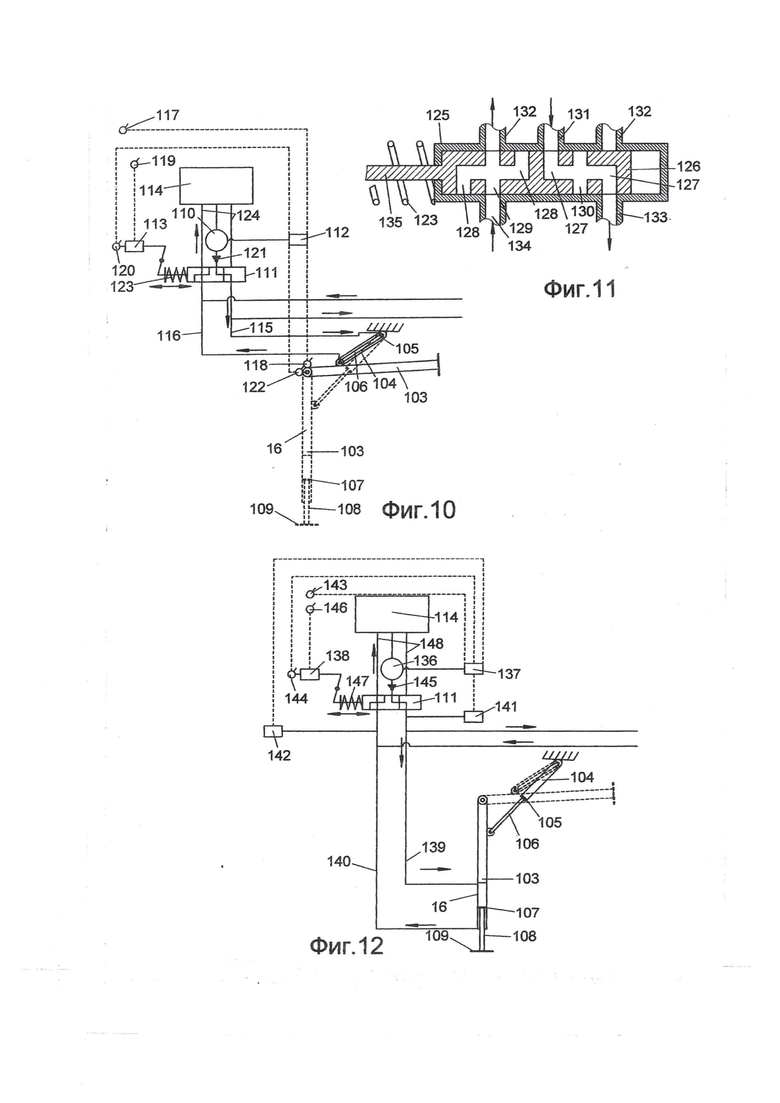
Система управления выпуском и уборкой опор 103, см. фиг. 10, состоит из электронасоса 110, золотника 111, пускателя 112, электромагнитного реле 113, бака с рабочей жидкостью 114, гидравлической сети выпуска опор 115, гидравлической сети уборки опор 116, тумблера выпуска опор 117, выключателя выпуска опор 118, тумблера уборки опор 119, включателя насоса уборки опор 120, обратного клапана 121, выключателя насоса уборки опор 122, возвратной пружины 123, трубок обратной подачи рабочей жидкости 124. Золотник 111, состоит, см. фиг. 11, из корпуса 125, в котором находится, с возможностью продольного перемещения, поршень 126, внутри которого выполнены каналы сети выпуска опор 127, сети уборки опор 128, выпуска рабочей жидкости из нижней части гидравлического цилиндра 129, выпуска рабочей жидкости из верхней части гидравлического цилиндра 130. Корпус 125 имеет патрубки: впускной 131, выпускные 132, сети выпуска опор 133, сети уборки опор 134. К поршню 126 золотника 111 жестко крепится шток 135, на котором находится возвратная пружина 123.
Система управления выдвижением и втягиванием опор 108 из опор 103, см. фиг. 12, состоит из электронасоса 136, золотника 111, пускателя 137, электромагнитного реле 138, бака с рабочей жидкостью 114, гидравлической сети 139 выдвижения опор 108, гидравлической сети 140 втягивания опор 108, реле давления 141 в сети выдвижения 139, реле давления 142 в сети втягивания 140, тумблера 143 выдвижения опор, включателя 144 пуска насоса в сети втягивания опор, обратного клапана 145, тумблера 146 втягивания опор, возвратной пружины 147, трубок 148 обратной подачи рабочей жидкости в бак 114.
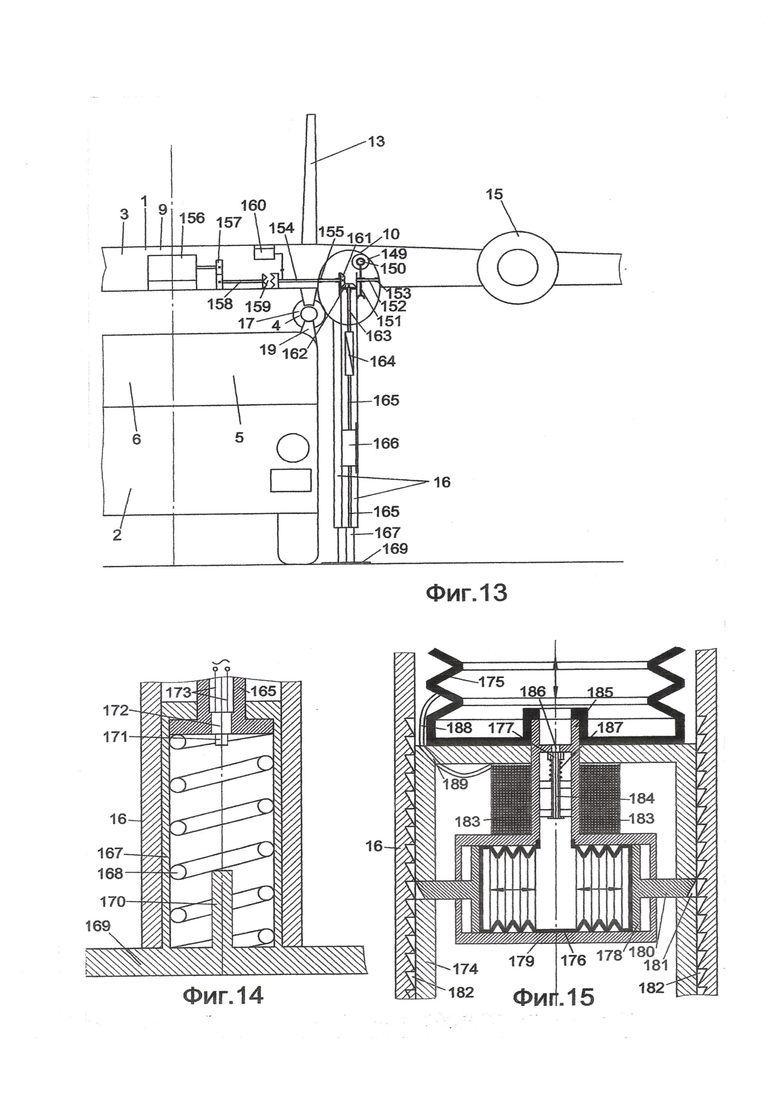
Кинематическая схема механизма управления опорами 16, см. фиг. 13, состоит из электродвигателя 149, вал которого соединен с червяком 150, входящим в зацепление с червячным колесом 151, жестко закрепленным на опоре 16. Последняя установлена на оси 152, укрепленной на хвостовой балке 10, с помощью втулки 153, опирающейся с обратной стороны на вал 154, укрепленный во втулке 155, установленной на балке 10.
Механизм компенсации неровностей стояночной площадки и веса аэроплана 3, состоит из электродвигателя 156, укрепленного в крыле 9, вал которого зубчатой передачей 157 связан с валом 158, объединенным муфтой сцепления 159 с валом 154. Муфта 159 управляется электромагнитным реле 160 укрепленным на крыле 9. На конце вала 154 находится шестерня 161, входящая в зацепление с конической шестерней 162, которая крепится на валу 163 установленному на опоре 16. Вал 163 связан винтовой передачей 164 с валом 165 имеющим поступательное соединение 166. Вал 165 входит в выдвижную опору 167, см. фиг. 14, с возможностью поступательного движения внутри нее, и упирается в пружину 168, второй конец которой опирается на опорную пластину 169. Последняя содержит нажимной палец 170, который имеет возможность давить на кнопку 171 включателя 172 при сжатии пружины 168. Включатель 172 проводами 173, проходящими внутри трубчатых валов 163 и 165, связан с электромагнитным реле 160. Провода 173 в валу 165 имеют форму пружины, что обеспечивает возможность удлинения.
Пневматическая система выпуска и уборки опор 16 аналогична, в основном, гидравлической и здесь не приводится. Основные механизмы и оборудование этой системы: компрессор, баллоны для сжатого воздуха, воздухопроводы металлические и упругие резиновые, клапана. Система компенсации неровностей стояночной площадки и веса аэроплана 3, состоит из выдвижной опоры 174, упругой гофрированной камеры 175, см. фиг. 15, находящейся в опоре 16 и имеющей возможность удлиняться под давлением воздуха внутри нее. Камеры 175 соединяются с камерами 176, находящимися в полости выдвижных опор 174, через канал с впускным клапаном 177. Торцы камер 176 упираются в опорные пластины 178, установленные в цилиндр 179 с возможностью возвратно-поступательных движений и жестко связанные со стопорными пальцами 180, которые находятся в отверстиях 181. Пальцы 180 имеют возможность входить в пазы 182 выполненные в стенке опоры 16. У впускного клапана 177 установлено электромагнитное реле 183, сердечник которого 184 связан с впускным клапаном 177. Цилиндр 179 и патрубок 185 выполнены из немагнитного материала (пластмассы). Клапан 177 прижат к отверстию 186 пружиной 187. К реле 183 подходят провода 188 уложенные витками вокруг камер 175 и проходящие через отверстие 189 в подвижной опоре 174.
Автолет 1 работает следующим образом. На фиг. 1, 2, 3 автолет 1 находится на стояночной площадке с опущенными стояночными опорами 16, готовый к разъединению на автомобиль 2 и аэроплан 3.
На фиг. 4 изображен уже открытый механический замок 21, который позволяет произвести разъединение автомобиля 2 и аэроплана 3 путем движения автомобиля 2 назад между опорами 16, которые компенсировали неровности стояночной площадки и приняли на себя вес аэроплана 3. При этом из конусов 17 аэроплана 3 выходят конуса 18 автомобиля 2, оставляя на опорах 16 аэроплан 3 на стояночной площадке и освобождая автомобиль 2 для доставки пассажиров и груза на объект назначения, в т.ч. и по бездорожью. После разъединения в отверстие над разъемом 41 надо вкрутить пробку, защищающую от пыли, грязи, воды.
Если необходимо замкнуть замок 21 для объединения автомобиля 2 и аэроплана 3 в автолет 1, надо вытащить стопорный болт 30 из отверстий 29 и 31, предварительно нажав на стопорную пластину 33 и оттянув трубку 22 за кольцо 27 вниз. После этого надо отпустить кольцо 27, тогда пружина 26 поднимет трубку 22 и стопорное кольцо 25 с разъемом 41, который войдет в розетку 43, соединяя кабели 39 и 44 силовых и управляющих сетей. Стопорное кольцо 25, при этом, обеспечит надежное объединение конусов 17 и 18, препятствуя выходу конуса 18 из конуса 17. После этого необходимо зафиксировать трубку 22, вставив стопорный болт 30 в отверстия 28 и 31.
Усложненный механический замок 46, см. фиг. 5, 6, 7, позволяет соединять сразу несколько силовых и управляющих кабелей 48 и 52 во время входа 18 в конус 17, при этом разъемы 47 входят в розетки 51. Стопор 54 входит в стопорную шайбу 56 через прорезь 55 в ней, после чего поворачивают рычаг 62 из горизонтального положения в вертикальное, см. фиг. 7, вытащив стопорный болт 69 и поставив, после поворота, в позицию 68. Вращение вала 61 через шкивы 58, 60, гибкую передачу 59 передается на вал 57, который поворачивает стопорную шайбу 56 на 90 градусов, блокируя выход конуса 18 из конуса 17. Расстыковка осуществляется после разблокировки стопора 54 поворотом рычага 62 из вертикального положения в горизонтальное и выдвижения конуса 18 из конуса 17. После расстыковки необходимо привинтить защитные колпаки на торцы конусов 18 для защиты розеток 51 от пыли, грязи, влаги.
На фиг. 8 приведен разрез замка 70, работа которого осуществляется с помощью электродвигателя 75, который вращает вал 76, соединенный с червяком 77, вращающим червячное колесо 78, передающим вращение через вал 79, шестерню 80, зубчатое колесо 81 и шлицы 83 и 84 трубке 85. Последняя своей резьбой 96 вкручивается в резьбу 95 внутри трубки 94 и движется вверх, перемещая разъем 73 к розетке 72, при этом вращение разъема 73 предотвращается выступами 99, входящими в пазы 100. Кроме этого, вращение трубки 85 через шлицы 84, конические шестерни 87 и 88, вал 89, шлицы 90 и 91, передается болту 71, который ввинчивается в отверстие с резьбой 92, находящееся в конусе 17. В результате кабели 101 и 102 соединяются, а конусы 17 и 18 объединяются в один, объединяя автомобиль 2 и аэроплан 3 в автолет 1. Для разъединения необходимо реверсивное вращение вала 76, тогда болт 71 будет вывинчиваться, также произойдет разъединение розетки 72 и разъема 73, конусов 17 и 18. После разъединения необходимо также вкрутить пробку в отверстие над разъемом 73, для предотвращения попадания пыли, грязи, воды. Возможен вариант замка с соединением кабелей из замка 46 и стяжки конусов из замка 70.
Стояночные опоры 16, перед разъединением автолета 1, выпускаются из тела хвостовой балки 10, см. фиг. 9, затем из неподвижных частей опор 103 выдвигаются подвижные части 108 до упора пластинами 109 в стояночную площадку.
Гидравлический привод работает следующим образом. В гидравлический цилиндр 104 над поршнем 105 подается рабочая жидкость, в результате последний движется вниз вместе со штоком 106, который давит на опору 16, перемещая ее в вертикальное положение. После этого рабочая жидкость подается в цилиндр над поршнем 107 и выдвигает подвижную часть опоры 108 из опоры 103 до упора пластины 109 в стояночную площадку. При уборке опор рабочая жидкость подается под поршень 107 до тех пор, пока пластина 109 не упрется в опору 103. Затем рабочая жидкость подается под поршень 105 до тех пор, пока опора 16 не повернется и не окажется в хвостовой балке 10.
Вес аэроплана 3 Раэ распределяется на передние опоры 16 Р1 и задние Р2, т.е. Раэ=Р1+Р2 [1], при этом выполняется соотношение Р1/Р2=h2/h1 [2], где:
h1 - расстояние от центра тяжести аэроплана до передних опор;
h2 - расстояние от центра тяжести аэроплана до задних опор;
Для удержания веса аэроплана опорами необходимо создать в гидравлической системе давление р=Раэ/S [3], где S - общая площадь поршней передних и задних опор. S=2*(S1+S2) [4], где S1 - площадь поршня передней опоры, S2 - площадь поршня задней опоры. Поскольку P1=2*p*S1, Р2=2*p*S2 и учитывая [2], получим S1/S2=h2/h1 или R1^2/R2^2=h2/h1 [5], где R1 - радиус поршня передних опор, R2 - радиус поршня задних опор, отсюда  [6].
[6].
При выполнении соотношения [6] вес аэроплана компенсируется четырьмя опорами независимо от неровностей стояночной площадки и разъединение автолета 1 на автомобиль 2 и аэроплан 3 произойдет легко и быстро. Стояночные опоры 16 разгрузят подвеску автомобиля 2 от веса аэроплана 3 и конуса 18 свободно выйдут из конусов 17, даже если неровности стояночной площадки будут приподнимать или опускать автомобиль 2 при выезде из-под аэроплана 3. Естественно, неровности должны быть не более определенных значений зависящих от конструкции конусов, подвесок, опор. Вес аэроплана меняется во время эксплуатации, уменьшается количество горючего, меняется центровка. Все эти изменения необходимо учитывать, но это задачи второго плана.
Работа системы управления гидравлическим приводом выпуска, уборки опор 16 из хвостовых балок 10 происходит следующим образом. Включают тумблер выпуска опор 117, см. фиг. 10, сигнал от которого идет на пускатель 112, который включает электронасос 110. Последний подает рабочую жидкость из бака 114 через золотник 111 по гидравлической сети 115 к верхней части гидравлических цилиндров 104 над поршнями 105, происходит выпуск опор 16 из хвостовых балок 10. При этом рабочая жидкость, находящаяся ниже поршней 105, по гидравлической сети 116 вытесняется через золотник 111 и трубку 124 обратно в бак 114. Электродвигатель 110 выключается выключателями 118 через пускатель 112.
Для уборки опор 16 в хвостовые балки 10 включают тумблер 119, сигнал от которого идет на реле 113, сердечник которого втягивается и через рычаг с шарниром давит на шток 135, см. фиг. 11, золотника 111, сжимая пружину 123, перемещает поршень 126 из левого положения в правое. При этом канал 128 соединяет впускной патрубок 131 через гидравлическую сеть 116 с рабочими цилиндрами 104 ниже поршней 105. А канал 130 соединяет выпускной патрубок 132 через гидравлическую сеть 115 с рабочими цилиндрами 104 выше поршней 105. После переключения золотника 111 реле 113 нажимает на включатель 120, который подает сигнал на пускатель 112, включающий электронасос 110. Последний по сети 116 подает рабочую жидкость в цилиндр 104 под поршень 105, который через шток 106 поднимает опору 16 в хвостовую балку 10, при этом жидкость из верхней части цилиндра 104 выдавливается через сеть 115 в бак 114. Электронасос 110 отключается выключателем 122 через пускатель 112.
Работа системы управления выдвижных опор 108, см. фиг. 12, происходит следующим образом.
Для выдвижения опор 108 из опор 103 включают тумблер 143, который через пускатель 137 включает электронасос 136. Последний подает рабочую жидкость из бака 114 через золотник 111 и гидравлическую сеть 139 в цилиндр опоры 103 над поршнем 107, которая выдвигает опору 108 из опоры 103. При этом рабочая жидкость из-под поршня 107 вытесняется через сеть 140, золотник 111 в бак 114. Выдвижение опор 108 происходит до тех пор, пока давление в сети 139 не достигнет необходимого р, см. [3], и реле давления 141 через пускатель 137 не отключит электронасос 136.
Для втягивания опор 108 включают тумблер 146, далее происходит переключение золотника 111, аналогичное вышеописанному в системе выпуска опор 16. Сеть 140 подключается к электронасосу 136, а сеть 139 – к выпускной трубке 148. Далее включается электронасос 136 через включатель 144 и пускатель 137, который подает рабочую жидкость под поршень 107, поднимая опору 108 и вытесняя жидкость из гидроцилиндра опоры 103 в бак 114. Отключение электронасоса 136 производится с помощью реле давления 142 через пускатель 137, при достижении определенного давления в сети 140.
Работа электромеханического привода опор 16, см. фиг. 13,14, происходит следующим образом.
Для выпуска опоры 16 на электродвигатель 149 подается электрический ток, в результате вал вращает червяк 150, который вращает червячное колесо 151, жестко закрепленное на опоре 16. Последняя, вращаясь на осях 152 и 154, выходит из хвостовой балки 10, принимая вертикальное положение, после чего электродвигатель 149 отключается.
Уборка опоры 16 происходит при включении реверса электродвигателя 149 аналогичным образом. Отключение электродвигателя 149 происходит при достижении опорой 16 транспортного положения в балке 10.
Для выдвижения опоры 167 из опоры 16 на электродвигатель 156 подают электрический ток, в результате вращение его вала через зубчатую передачу 157, валы 158, 54, муфту сцепления 159, конические шестерни 161, 62, передается валу 163. Последний с помощью винтовой передачи 164 преобразует вращательное движение в поступательное движение вала 165, закрепленного в поступательном соединении 166. Вал 165 выдвигает опору 167 через пружину 168 вплоть до упора пластины 169 в стояночную площадку. Далее пружина 168 сжимается до тех пор, пока опорный палец 170 не надавит на кнопку 171 и выключатель 172 не включит реле 160, которое отключит муфту сцепления 159 и разъединит валы 158 и 154.
Втягивание опоры 167 происходит при реверсивном вращении трансмиссии.
Отключение выдвижения опоры 167 происходит в том случае, когда опорная пружина 168 сжимается с усилием Р1/2 для передней опоры и Р2/2 для задней, когда будет справедливым равенство:
P1/2=kl*dl Р2/2=k2*dl2, где:
Р1 - вес аэроплана, приходящийся на передние опоры;
Р2 - вес аэроплана, приходящийся на задние опоры;
k1, k2 - коэффициенты жесткости пружин 168 передних, задних опор;
dl1, dl2 - расстояние между опорным пальцем 170 и кнопкой 171 выключателя 172 передних, задних опор. Таким образом компенсируются неровности стояночной площадки и вес аэроплана 3 в электромеханическом приводе опор 16.
Пневматическая система привода опор 16 работает следующим образом. Перед разъединением автолета 1 на автомобиль 2 и аэроплан 3 на стояночной площадке из хвостовых балок 10 выпускаются стояночные опоры 16 с помощью пневмоцилиндров аналогичных гидроцилиндрам. Далее из опор 16 выдвигаются опоры 174 с помощью пневматических камер 175, в которые подается сжатый воздух из баллона. Подача воздуха прекращается, когда в пневмосистеме будет достигнуто давление р, см. [3], и произойдет компенсация веса аэроплана 3 и неровностей стояночной площадки.
Поскольку пневмосистемы менее надежны, чем гидросистемы от утечек рабочего тела (воздух, рабочая жидкость), внутри выдвижных частей опор 174, см. фиг. 15, находятся блокирующие механизмы, работающие следующим образом. При выдвижении опор 174 в камере 175 создается давление воздуха р, под действием которого открывается клапан 177 и воздух поступает в камеру 176, где под его действием на пластины 178 выдвигаются пальцы 180 в гнездах 181. Пальцы 180 входят в пазы 182 и препятствуют обратному движению опоры 174. Релейный элемент отключает выдвижение опор 174 при достижении заданного давления р в пневматической системе. Если в пневматической системе есть утечка воздуха, клапаны 177 препятствуют выходу воздуха из камер 176, давление в которых удерживает пальцы 180 в пазах 182.
После соединения автомобиля 2 и аэроплана 3 в автолет 1, включают тумблер, замыкающий цепь реле 183, сердечник 184 втягивается внутрь его и открывает клапан 177, преодолевая сопротивление пружины 187 и давления воздуха в камере 176. Воздух выходит из последней, давление падает, пальцы 180 под действием упругих сил камер 176 выходят из пазов 182, освобождая от блокировки опоры 174.
Для втягивания опор 174 в опоры 16 открывают выпускной клапан системы и включают тумблер цепи реле 183, воздух выходит из пневмосети и всех камер, снимается блокировка опор 174, и они втягиваются в опоры 16 силами упругости камер 175.
После втягивания убирают телескопические опоры 16 в хвостовые балки 10, автолет готов к выезду на взлетную полосу.
Предложенная конструкция автолета позволяет устранить или уменьшить вышеперечисленные недостатки аналогов и достичь заявленные основные технические характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОДЯНОЕ КОЛЕСО И СПОСОБ ЖЕСТКОГО ЗАКРЕПЛЕНИЯ ЕГО ОСИ НА ДНЕ ВОДОТОКА | 1991 |
|
RU2010991C1 |
| ТУРБОДИСК | 2014 |
|
RU2572980C1 |
| РЕВОЛЬВЕР-ПУЛЕМЕТ | 2017 |
|
RU2674393C1 |
| Комплексная грузо-пассажирская переправа через водоток с приводом от водяного колеса | 2019 |
|
RU2713312C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2009945C1 |
| УСТРОЙСТВО, СОЗДАЮЩЕЕ ПОТОК В ГАЗАХ И ЖИДКОСТЯХ | 2012 |
|
RU2525045C2 |
| АВТОМОБИЛЬНЫЙ ПОЛУПРИЦЕП | 2018 |
|
RU2680361C1 |
| СБОРНО-РАЗБОРНЫЙ ВОДНЫЙ ВЕЛОСИПЕД | 1991 |
|
RU2011603C1 |
| Волномах | 2020 |
|
RU2736748C1 |
| ЧЕТЫРЕХОСНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684226C1 |

Изобретение относится к транспортным средствам двойного назначения - автомобилю и самолету и может быть применено для транспортного сообщения с удаленными населенными пунктами и другими объектами. Автолет состоит из автомобиля и аэроплана, объединенных в одно целое стыковочными устройствами, выполненными в виде двух усеченных конусов, наружные из которых крепятся к аэроплану, внутренние – к автомобилю, и имеют возможность входить в наружные конуса и выходить из них. Блокировка конусов и объединение автомобиля и аэроплана в автолет выполнена в виде механического или электромеханического замка с соединением силовых и управляющих сетей в виде розетка-разъем. Хвостовые балки аэроплана содержат передние и задние телескопические опоры, имеющие возможность выпускаться и убираться с помощью гидравлических, пневматических или электромеханических систем, которые также имеют возможность выдвигать и втягивать подвижные части опор с компенсацией неровностей стояночной площадки и веса аэроплана. Обеспечивается повышение проходимости и надежности транспортного средства. 15 ил.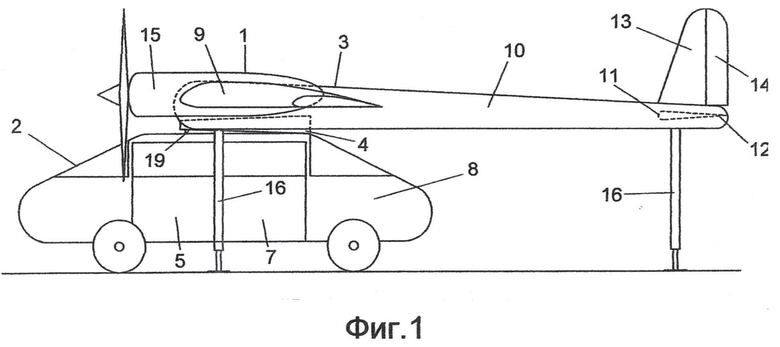
Автолет, содержащий автомобиль, крылья, авиадвигатели, хвостовые балки и оперение, отличающийся тем, что состоит из автомобиля и аэроплана, объединенных в одно целое стыковочными устройствами, выполненными в виде двух усеченных конусов, наружные из которых крепятся к аэроплану, внутренние – к автомобилю, и имеют возможность входить в наружные конуса и выходить из них, причем блокировка конусов и объединение автомобиля и аэроплана в автолет выполнена в виде механического или электромеханического замка с соединением силовых и управляющих сетей в виде розетка-разъем, хвостовые балки аэроплана содержат передние и задние телескопические опоры, имеющие возможность выпускаться и убираться с помощью гидравлических, пневматических или электромеханических систем, которые также имеют возможность выдвигать и втягивать подвижные части опор с компенсацией неровностей стояночной площадки и веса аэроплана.
| US 20180257448 A1, 13.09.2018 | |||
| МОДЕРНИЗИРОВАННОЕ БОГДАНОВА УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АВТОМОБИЛЯ ИЛИ ДРУГОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562474C1 |
| ЛЕТАЮЩЕЕ УСТРОЙСТВО КОРШУНОВА В.М. | 2014 |
|
RU2561684C1 |
| US 11027584 B1, 08.06.2021 | |||
| Трансформируемый самолет-амфибия вертикального взлета и посадки | 2017 |
|
RU2662311C1 |

