Изобретение относится к области железнодорожного транспорта и может быть использовано для проверки функционирования локомотивных систем, устройств безопасности, а также модулей и блоков, входящих в их состав, при проведении работ на контрольных пунктах и дорожных центрах, линейных эксплуатирующих предприятий отрасли для проведения диагностики функций бортового оборудования и связанных с ним приборов управления подвижного состава, а также для комплексной проверки на заводах изготовителях.
Известно устройство ПК-КЛУБ-У (Руководство по эксплуатации 36991-950-00РЭ, 24.10.2006), предназначенное для проверки работоспособности его составных частей на этапах входного контроля и технического облуживания в пунктах технического обслуживания и контрольно-ремонтных пунктах локомотивных депо или организациях сигнализации и связи.
Недостатки этого устройства заключаются в использовании старой элементной базы, больших массогабаритных показателях, а также в отсутствии возможности автоматизации процесса измерений, сохранении их на электронном носителе и наращивании проверяемых функций.
Наиболее близким к заявляемому устройству является комплекс проверочной аппаратуры КПА-САУТ-ЦМ/485 (Руководство по эксплуатации 99Г.04.00.00-01 РЭ, 29.01.2002 г.), содержащий имитатор сигналов ДПС, блок связи БС-КПА, программатор блоков ПБ САУТ-ЦМ, пульт проверки датчиков угла поворота, петлю испытательную Писп. - САУТ, блок контроля БК-БС-КПА, блок проверки БС-КЛУБ, блок проверки БС-ДПС, и предназначен для диагностики отдельных блоков и комплекса аппаратуры САУТ-ЦМ/485 на стенде автоматизированной проверки, для программирования блоков аппаратуры САУТ-ЦМ/485, для проведения поверки датчиков угла поворота ДПС-У и антенны Ан - САУТ-УМ, для производства ремонта блоков аппаратуры САУТ-ЦМ/485.
Недостатками этого устройства являются использование отдельных устройств для проверки составных частей системы безопасности и требование значительной площади для установки блоков, отсутствие возможности ввода, хранения и исполнения программ контроля (файлов - сценариев), что снижает необходимую достоверность результатов проверки, и экономическую эффективность работ по обслуживанию комплекса, отсутствие возможности формирования имитации сигналов АЛС, движения по СНС, движения от внешних систем, что делает данное проверочное оборудование не способным для проверки данных каналов приема информации, отсутствие возможности приема диагностической информации о работе локомотивного устройства безопасности, сформированной за время поездки с последующей обработкой, что делает проверку не эффективной.
Технический результат изобретения заключается в повышении эффективности диагностики и достоверности ее результатов за счет автоматизации процесса проверки объектов контроля.
Технический результат достигается тем, что стационарное устройство диагностики для технического обслуживания локомотивных устройств безопасности содержит блок связи, включающий в себя ячейку анализа, проверки, программирования и имитации, первый порт которой соединен с линией связи CAN-BUS, предназначенной для подключения ко вторым портам контролируемых ячеек ШЛЮЗ и регистрации сигналов CAN, а также к порту CAN-BUS локомотивного устройства безопасности, второй порт ячейки анализа, проверки, программирования и имитации соединен с линией связи RS-485, предназначенной для подключения ко вторым портам контролируемых ячеек приема сигналов точечного канала САУТ, входных дискретных сигналов, коммутации дискретных сигналов, вычислителя сигналов САУТ, а также к порту RS-485 локомотивного устройства безопасности, третий порт ячейки анализа, проверки, программирования и имитации соединен с линией связи CAN, предназначенной для подключения к первым портам контролируемых ячеек регистрации сигналов АЛС, приема сигналов АЛС, приема сигналов точечного канала САУТ, входных дискретных сигналов, коммутации дискретных сигналов, электронной карты и спутниковой навигационной системы, регистрации сигналов CAN, вычислителя сигналов САУТ, ШЛЮЗ, центрального обработчика, а также к порту CAN локомотивного устройства безопасности, пятый порт ячейки анализа, проверки, программирования и имитации соединен с линией связи CAN-TECH, предназначенной для подключения к портам контролируемых ячеек приема входных дискретных сигналов, вход которой соединен с выходом OUT локомотивного устройства безопасности, ячейки формирования выходных дискретных сигналов, выход которой подключен к входам IN и РУК локомотивного устройства безопасности, к источнику питания, выход которого подключен к входу ячейки коммутации аналоговых сигналов, выход которой подключен к входам ячеек входных дискретных сигналов и коммутации дискретных сигналов, ячейки управления коммутацией аналоговых сигналов, первый выход которой подключен к ячейке коммутации аналоговых сигналов, а второй выход - к ячейке контроля приема дискретных сигналов, ячейки контроля усилителя электропневматического клапана, первый выход которой подключен к входу усилителя электропневматического клапана, первый выход которого подключен к входу ячейки контроля усилителя электропневматического клапана, а второй - к входу ячейки нагрузки, ячейки проверочной, выход которой подключен к первому входу ячейки центрального обработчика, выход которой подключен к входу ячейки безопасного сравнения, выход которой - ко второму входу ячейки центрального обработчика, ячейки мастера фильтров, выход которой подключен к входу ячейки фильтрации сигналов, выход которой - к входу ячейки мастера фильтров, четвертый порт ячейки анализа, проверки, программирования и имитации подключен к порту USB персонального компьютера, выход которого подключен через разъем к входу ячейки имитатора электронной карты и спутниковой навигационной системы, первый выход ячейки анализа, проверки, программирования и имитации соединен с сигнальной линией связи, предназначенной для подключения к входам контролируемых ячеек регистрации сигналов АЛС, приема сигналов АЛС, приема сигналов точечного канала САУТ, а также к входу SIGNAL локомотивного устройства безопасности, второй выход ячейки анализа, проверки, программирования и имитации подключен к входам осциллографа, частотомера и мультиметра.
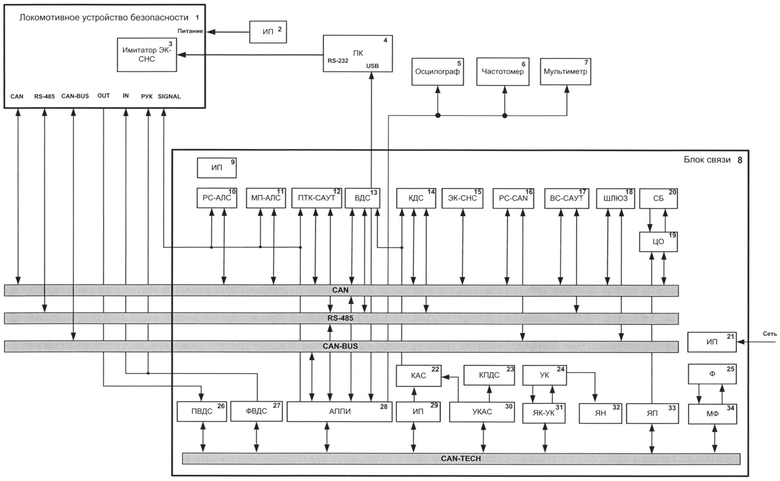
На чертеже представлена схема стационарного устройства диагностики для технического обслуживания локомотивных устройств безопасности.
Устройство содержит блок связи 8, включающий в себя ячейку анализа, проверки, программирования и имитации АППИ 28, первый порт которой соединен с линией связи CAN-BUS, предназначенной для подключения ко вторым портам ячеек регистрации сигналов CAN PC-CAN 16, ШЛЮЗ 18, а также к порту CAN-BUS локомотивного устройства безопасности 1, второй порт ячейки АППИ 28 соединен с линией связи RS-485, предназначенной для подключения к вторым портам контролируемых ячеек приема сигналов точечного канала САУТ ПТК-САУТ 12, входных дискретных сигналов ВДС 13, коммутации дискретных сигналов КДС 14, вычислителя ВС САУТ 17, а также к порту RS-485 локомотивного устройства безопасности 1, третий порт ячейки АППИ 28 соединен с линией связи CAN, предназначенной для подключения к первым портам контролируемых ячеек регистрации сигналов АЛС PC-АЛ С 10, приема сигналов АЛС МП-АЛС 11, электронной карты и спутниковой навигационной системы ЭК-СНС 15, центрального обработчика ЦО 19, приема точечного канала САУТ 12, регистрации сигналов PC-CAN 16, ШЛЮЗ 18, коммутации дискретных сигналов КДС 14, входных дискретных сигналов ВДС 13, а также к порту CAN локомотивного устройства безопасности 1, пятый порт ячейки АППИ 28 соединен с линией связи CAN-TECH, предназначенной для подключения к портам контролируемых ячеек приема входных дискретных сигналов ПВДС 26, вход которой соединен с выходом OUT локомотивного устройства безопасности 1, ячейки формирования выходных дискретных сигналов ФВДС 27, выход которой подключен к входам IN и РУК локомотивного устройства безопасности 1, ячейки питания ИП 29, выход которой подключен к входу ячейки коммутации аналоговых сигналов КАС 22, выход которой подключен к входам ячеек ВДС 13 и КДС 14, ячейки управления коммутацией аналоговых сигналов УКАС 30, первый выход которой подключен к ячейке коммутации аналоговых сигналов КАС 22, а второй выход к ячейке контроля приема дискретных сигналов КПДС 23, ячейки контроля усилителя ЯК-УК 31, первый выход которого подключен к входу усилителя ЭПК УК 24, первый выход которой подключен к входу ячейки ЯК-УК 31, а второй - к первому входу ячейки нагрузки ЯН 32, ячейки проверочной ЯП 33, выход которой подключен к первому входу ЦО 19, выход которой подключен к входу ячейки безопасного сравнения СБ 20, выход которой подключается к второму входу ячейки ЦО 19, ячейки мастера фильтров МФ 34, выход которой подключен к входу ячейки фильтрации сигналов Ф 25, выход которой подключен к входу МФ 34, четвертый порт ячейки АППИ 28 подключен к порту USB персонального компьютера ПК 4, выход которого подключен через разъем (на рисунке не показано) к входу ячейки имитатора ЭК-СНС 3, первый выход ячейки АППИ 28 соединен с сигнальной линией связи, предназначенной для подключения к входам контролируемых ячеек PC-АЛС 10, МП-АЛС 11, ПТК-САУТ 12, а также к входу SIGNAL локомотивного устройства безопасности 1. Для питания ячеек ВДС 26, ФВДС 27, АППИ 28, ИП 29, УКАС 30, ЯК-УК 31, ЯП 33, МФ 34, ИП 9 предназначен источник питания ИП 21 (на схеме не показано), вход которого подключен к сети 220 В переменного тока. Для питания проверяемых ячеек РС-АЛС 10, МП-АЛС 11, ПТК-САУТ 12, ВДС 13, КДС 14, ЭК-СНС 15, PC-CAN 16, ВС-САУТ 17, ШЛЮЗ 18, ЦО 19, СБ 20, предназначена ячейка питания ИП 9 (на схеме не показано). Выход источника питания ИП 2 подключен через разъем к входу локомотивного устройства безопасности 1. Второй выход ячейки АППИ 28 подключен к входам осциллографа 5, частотомера 6 и мультиметра 7.
Стационарное устройство диагностики для технического обслуживания локомотивных устройств безопасности работает следующим образом.
Устройство начинает работать сразу после подачи питания на блок связи 8, включения ИП 2 и запуска управляющей программы на ПК 4, предназначенном для контроля и управления ходом выполняемых проверок, а также для формирования управляющих команд. Из сети переменного тока напряжением 190-240 В питание поступает на вход ИП 21, где осуществляется его преобразование в постоянное стабилизированное напряжение уровнем 48 В, с выхода которого стабилизированное напряжение поступает на вход ячеек: АППИ 28, ПВДС 26, ФВДС 27, ИП 9, 29, УКАС 30, ЯК-УК 31, ЯП 33 и МФ 34. После включения ИП 2 с его выхода стабилизированное напряжение уровнем 50 В, поступает на вход локомотивного устройства безопасности 1. С выхода ИП 9 стабилизированное напряжение уровнем от 45 до 55 В поступает на входы ячеек: РС-АЛС 10, МП-АЛС 11, ПТК-САУТ 12, ВДС 13, КДС 14, ЭК-СНС 15, PC-CAN 16, ВС-САУТ 17, Шлюз 18, ЦО 19, СБ 20.
При проведении проверки отдельных модулей, входящих в состав локомотивного устройства безопасности 1, посредством программного обеспечения, установленного на ПК 4, управляющие команды которого через порт USB поступают на четвертый порт ячейки АППИ 28, где осуществляется их интерпретация и обработка. После обработки они через пятый порт и интерфейс CAN-TECH передаются на порты ячеек ВДС 26, ФВДС 27, ИП 29, УКАС 30, ЯК-УК 31, ЯП 33, МФ 34.
Устройство осуществляет проверку ячейки PC-АЛС 10. По команде оператора, с помощью управляющей программы установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для установки сигнала АЛС, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 со своего первого выхода по сигнальной линии связи передает установленный сигнал АЛС на вход ячейки PC-АЛС 10, в которой осуществляется его прием и запись. После записи принятых сигналов АЛС, с помощью установленного программного обеспечения, на ПК 4 осуществляется расшифровка записанных данных, для принятия решения о работоспособности ячейки PC-АЛС 10.
Устройство осуществляет проверку ячейки МП-АЛС 11. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды через четвертый порт на ячейку АППИ 28 для установки сигнала АЛС. Ячейка АППИ 28 принимает данную команду и обрабатывает ее. И на основании принятой команды со своего первого выхода по сигнальной линии связи передает установленный сигнал АЛС на вход ячейки МП-АЛС 11, где осуществляется его прием и обработка. После обработки ячейкой МП-АЛС 11 принятый сигнал через порт ячейки МП-АЛС 11 передается в CAN-интерфейс и поступает на третий порт ячейки АППИ 28, в которой осуществляется его обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного и принятого сигнала, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки ПТК САУТ 12. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для установки сигнала точечного канала САУТ, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 со своего первого выхода по сигнальной линии связи передает на вход ячейки ПТК-САУТ 12 установленный сигнал точечного канала САУТ, где осуществляется его прием и обработка. После обработки принятый сигнал с первого порта передается по CAN-интерфейсу и поступает на третий порт ячейки АППИ 28, в которой осуществляется его обработка и передача с четвертого порта на порт USB ПК 4, где осуществляется сравнение сформированного и принятого сигнала, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки CAN PC-CAN 16. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для передачи сообщений CAN, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через порты один и три по интерфейсам CAN и CAN-BUS передает CAN сообщения, которые поступают на первый и второй порт ячейки PC-CAN 16, которая принимает данные сообщения и записывает их. После записи ячейкой PC-CAN 16 принятых сообщений CAN с помощью установленного программного обеспечения на ПК 4 осуществляется расшифровка записанных данных, для принятия решения о работоспособности ячейки PC-CAN 16.
Устройство осуществляет проверку ячейки ВДС 13. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для формирования дискретных сигналов определенного уровня, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данную команду через порт на вход ячейки УКАС 30, а также через порт на вход ячейки ИП 29. После приема и обработки команды ячейка ИП 29 со своего выхода формирует установленный уровень напряжения, который с ее выхода поступает на первый вход ячейки КАС 22. После приема и обработки команды ячейка УКАС 30 с первого выхода формирует управляющий сигнал, который поступает на второй вход ячейки КАС 22. На основании данного управляющего сигнала ячейка КАС 22 коммутирует напряжение установленного уровня и со своего выхода передает на вход ячейки ВДС 13, где осуществляется его прием и обработка. После обработки принятый сигнал через первый порт передается по CAN-интерфейсу на третий порт ячейки АППИ 28, где осуществляется его обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного и принятого дискретных сигналов, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки КДС 14. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для формирования дискретных сигналов определенного уровня и полярности, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данную команду через порт на вход ячейки УКАС 30, а также через порт на вход ячейки ИП 29. После приема и обработки команды ячейка ИП 29 со своего выхода формирует установленный уровень напряжения, который поступает на первый вход ячейки КАС 22. После приема и обработки команды ячейка УКАС 30 с первого выхода формирует управляющий сигнал, который поступает на второй вход ячейки КАС 22. На основании данного управляющего сигнала ячейка КАС 22 коммутирует напряжение установленного уровня и полярности и со своего выхода передает на вход ячейки КДС 14, где осуществляется его прием и обработка. После обработки принятый сигнал через первый порт по CAN-интерфейсу передается на третий порт ячейки АППИ 28, где осуществляется его обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного и принятого дискретного сигнала, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки ЭК-СНС 15. Сигналы текущей координаты, по отношению к проверяющему (геопозиция), от ячейки ЭК-СНС 15 через порт по CAN интерфейсу передаются на третий порт ячейки АППИ 28, где осуществляется их обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется их обработка и визуальный контроль.
Устройство осуществляет проверку ячейки ВС-САУТ 17. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для проверки ячейки ВС-САУТ 17, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через третий порт по интерфейсу CAN передает данную команду через первый порт на вход ячейки ВС-САУТ 17, где осуществляется ее прием и обработка. После обработки команды данные через второй порт ячейки ВС-САУТ 17 по интерфейсу RS-485 поступают на второй порт ячейки АППИ 28, где осуществляется их прием и обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется их обработка и визуальный контроль.
Устройство осуществляет проверку ячейки ШЛЮЗ 18. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для проверки ячейки ШЛЮЗ 18, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через порты один и три по интерфейсам CAN-BUS и CAN передает CAN сообщения, которые поступают через второй и первый порт на вход ячейки ШЛЮЗ 18, где осуществляется их прием и обработка. После обработки ячейкой ШЛЮЗ 18 принятых CAN сообщений через первый и второй порты по интерфейсам CAN и CAN-BUS передаются сообщения на третий и первый порт ячейки АППИ 28, где осуществляется их прием и обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированной и принятой команд, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки УК 24. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для формирования сигнала установленной частоты, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данную команду через порт на вход ячейки ЯК-УК 31. С выхода которой управляемый высокочастотный сигнал FEPK поступает на вход ячейки УК 24, с второго выхода которой формируется установленное напряжение на вход ячейки ЯН 32. Сигнал обратной связи с первого выхода ячейки УК 24 поступает на вход ячейки контроля усилителя ЯК-УК 31. После приема и обработки сигнала обратной связи ячейкой ЯК-УК 31 принятый сигнал через порт передается по интерфейсу CAN-TECH и поступает на пятый порт ячейки АППИ 28, где осуществляется его прием и обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного уровня частоты с принятыми сигналами установленного напряжения, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки КПДС 23. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для формирования дискретных сигналов, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данную команду через порт на вход ячейки УКАС 30. После приема и обработки команды через второй выход передает дискретные сигналы на вход ячейки КПДС 23. После установки сигналов по визуальному контролю на ячейке КПДС 23 осуществляется сравнение сформированного и принятого дискретного сигнала.
Устройство осуществляет проверку ячеек ЦО 19 и СБ 20. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команд на четвертый порт ячейки АППИ 28 для проверки ячейки ЦО 19, ячейка АППИ 28 принимает данные команды и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данные команды через порт на вход ячейки ЯП 33. После обработки команд ячейка ЯП 33 со своего выхода передает управляющие сигналы, которые поступают на первый вход ячейки ЦО 19, с выхода которой сигналы поступают на вход ячейки СБ 20, где они обрабатываются и по обратной связи поступают на второй вход ячейки ЦО 19. После обработки ячейкой ЦО 19 принятый сигнал через порт по интерфейсу CAN передается на третий порт ячейки АППИ 28, где осуществляется их прием и обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного и принятого сигнала в соответствии с командами, а также визуальный контроль принятых данных.
Устройство осуществляет проверку ячейки Ф 25. По команде оператора с помощью управляющей программы, установленной на ПК 4, через порт USB осуществляется передача команды на четвертый порт ячейки АППИ 28 для формирования сигнала установленной частоты, ячейка АППИ 28 принимает данную команду и обрабатывает ее. На основании принятой команды ячейка АППИ 28 через пятый порт по интерфейсу CAN-TECH передает данную команду через порт на вход ячейки МФ 34. После приема и обработки команды ячейка МФ 34 со своего выхода формирует управляемый высокочастотный сигнал, который поступает на вход ячейки Ф 25, проходит через фильтрующие цепи и по обратной связи с выхода ячейки Ф 25 поступает на вход ячейки МФ 34. После приема и обработки сигнала обратной связи ячейкой МФ 34 принятый сигнал через порт передается по интерфейсу CAN-TECH и поступает на пятый порт ячейки АППИ 28, где осуществляется его прием и обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированного и принятого сигнала, а также визуальный контроль принятых данных.
По команде оператора с помощью управляющей программы, установленной на ПК 4, сигналы установленных координат и времени с выхода RS-232 передаются на вход ячейки имитатора ЭК-СНС 3, где осуществляется прием данных сигналов с последующей обработкой, для имитации движения по электронной карте.
Внутренние аналоговые высокочастотные сигналы с второго выхода ячейки АППИ 28, поступают на входы Осциллографа 5, Частотомера 6, Мультиметра 7, где осуществляется прием и обработка данных сигналов с последующим выводом для обеспечения визуального контроля.
Устройство обеспечивает автоматический выбор последовательности проверяемых функций с помощью файла-сценария проверки. По команде оператора «Открыть» с помощью управляющей программы, установленной на ПК 4, осуществляется выбор файла-сценария проверки. По команде оператора «Запуск» управляющая программа через ПК 4 запускает автоматическую проверку. После запуска автоматической проверки команды через порт USB ПК 4 поступают через четвертый порт в ячейку АППИ 28, где осуществляется их интерпретация и обработка с последующим формированием в соответствии с файлом-сценарием команд и сигналов АЛС и сигналов точечного канала САУТ, с первого выхода ячейки АППИ 28 через сигнальную линию связи, поступают на вход SIGNAL локомотивного устройства безопасности 1, где осуществляется их обработка по встроенным алгоритмам. С ячейки АППИ 28 через пятый порт по интерфейсу CAN-TECH управляющие команды поступают через порт на ячейку ФВДС 27, с выхода которой они поступают на входы IN и РУК локомотивного устройства безопасности 1. После обработки принятые аналоговые сигналы с выхода OUT локомотивного устройства безопасности 1 передаются на вход ячейки ПВДС 26, в которой они обрабатываются и передаются через порт по интерфейсу CAN-TECH через пятый порт на ячейку АППИ 28, где осуществляется их прием, обработка и передача через четвертый порт на порт USB ПК 4, где осуществляется сравнение сформированных сигналов и команд с принятыми данными, а также их визуальный контроль.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| Переносное устройство диагностики и формирования сигналов фактической скорости для технического обслуживания локомотивных устройств безопасности | 2024 |
|
RU2832488C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ СПЕЦИАЛЬНОГО САМОХОДНОГО ПОДВИЖНОГО СОСТАВА НА КОМБИНИРОВАННОМ ХОДУ (ССПС КХ) | 2013 |
|
RU2544044C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
Изобретение относится к области железнодорожного транспорта и может быть использовано для проверки функционирования локомотивных систем безопасности. Устройство содержит локомотивное устройство безопасности, включающее контролируемую ячейку имитатора электронной карты и спутниковой навигационной системы, персональный компьютер, блок связи, осциллограф, частотомер и мультиметр. Блок связи, включающий в себя ячейку анализа, проверки, программирования и имитации, линию связи CAN-BUS, контролируемые ячейки ШЛЮЗ и регистрации сигналов CAN, линию связи RS-485, контролируемые ячейки приема сигналов точечного канала САУТ, входных дискретных сигналов, коммутации дискретных сигналов, вычислителя сигналов САУТ, линию связи CAN, контролируемые ячейки регистрации сигналов АЛС, приема сигналов АЛС, коммутации дискретных сигналов, ячейки электронной карты и спутниковой навигационной системы, ячейки ШЛЮЗ, центральный обработчик, линию связи CAN-TECH, контролируемые ячейки приема входных дискретных сигналов, ячейки формирования выходных дискретных сигналов, источник питания, ячейки коммутации аналоговых сигналов, ячейки управления коммутацией аналоговых сигналов, ячейки контроля приема дискретных сигналов, ячейки контроля усилителя электропневматического клапана, усилитель электропневматического капана, ячейки нагрузки, ячейки проверочной, ячейки безопасного сравнения, ячейки мастера фильтров, ячейки фильтрации сигналов, контролируемые ячейки регистрации сигналов АЛС и приема сигналов АЛС. Достигается повышение эффективности диагностики и достоверности ее результатов. 1 ил.
Стационарное устройство диагностики для технического обслуживания локомотивных устройств безопасности содержит блок связи, включающий в себя ячейку анализа, проверки, программирования и имитации, первый порт которой соединен с линией связи CAN-BUS, предназначенной для подключения ко вторым портам контролируемых ячеек ШЛЮЗ и регистрации сигналов CAN, а также к порту CAN-BUS локомотивного устройства безопасности, второй порт ячейки анализа, проверки, программирования и имитации соединен с линией связи RS-485, предназначенной для подключения ко вторым портам контролируемых ячеек приема сигналов точечного канала САУТ, входных дискретных сигналов, коммутации дискретных сигналов, вычислителя сигналов САУТ, а также к порту RS-485 локомотивного устройства безопасности, третий порт ячейки анализа, проверки, программирования и имитации соединен с линией связи CAN, предназначенной для подключения к первым портам контролируемых ячеек регистрации сигналов АЛС, приема сигналов АЛС, приема сигналов точечного канала САУТ, входных дискретных сигналов, коммутации дискретных сигналов, электронной карты и спутниковой навигационной системы, регистрации сигналов CAN, вычислителя сигналов САУТ, ШЛЮЗ, центрального обработчика, а также к порту CAN локомотивного устройства безопасности, пятый порт ячейки анализа, проверки, программирования и имитации соединен с линией связи CAN-TECH, предназначенной для подключения к портам контролируемых ячейки приема входных дискретных сигналов, вход которой соединен с выходом OUT локомотивного устройства безопасности, ячейки формирования выходных дискретных сигналов, выход которой подключен к входам IN и РУК локомотивного устройства безопасности, к источнику питания, выход которого подключен к входу ячейки коммутации аналоговых сигналов, выход которой подключен к входам ячеек входных дискретных сигналов и коммутации дискретных сигналов, ячейки управления коммутацией аналоговых сигналов, первый выход которой подключен к ячейке коммутации аналоговых сигналов, а второй выход - к ячейке контроля приема дискретных сигналов, ячейки контроля усилителя электропневматического клапана, первый выход которой подключен к входу усилителя электропневматического клапана, первый выход которого подключен к входу ячейки контроля усилителя электропневматического клапана, а второй - к входу ячейки нагрузки, ячейки проверочной, выход которой подключен к первому входу ячейки центрального обработчика, выход которой подключен к входу ячейки безопасного сравнения, выход которой - ко второму входу ячейки центрального обработчика, ячейки мастера фильтров, выход которой подключен к входу ячейки фильтрации сигналов, выход которой - к входу ячейки мастера фильтров, четвертый порт ячейки анализа, проверки, программирования и имитации подключен к порту USB персонального компьютера, выход которого подключен через разъем к входу контролируемой ячейки имитатора электронной карты и спутниковой навигационной системы, первый выход ячейки анализа, проверки, программирования и имитации соединен с сигнальной линией связи, предназначенной для подключения к входам контролируемых ячеек регистрации сигналов АЛС, приема сигналов АЛС, приема сигналов точечного канала САУТ, а также к входу SIGNAL локомотивного устройства безопасности, второй выход ячейки анализа, проверки, программирования и имитации подключен к входам осциллографа, частотомера и мультиметра.
| Прибор для автоматического контроля скорости поездов | 1923 |
|
SU485A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ получения фтористого алюминия и белой сажи | 1940 |
|
SU60827A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| US 6125311 A, 26.09.2000. | |||

