Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано на всех типах локомотивов, мотор-вагонных подвижных составах (МВПС) с целью повышения безопасности и регулирования движения поездов в маневровой и поездной работе, на высокоскоростных участках, а также в составе многоуровневой системы интервального регулирования.
Известно комплексное локомотивное устройство безопасности унифицированное (КЛУБ-У) (патент РФ на изобретение №2248899, МПК B61L 25/04, 2003 г.), содержащее открытую систему реального времени с модульной архитектурой, в которую включены и соединены между собой кабелем системного CAN-интерфейса блоки электроники, индикации, коммутации и ввода данных, расположенные в кабине машиниста. Блок электроники выполнен с возможностью определения допустимого скоростного режима и осуществления контроля за его соблюдением за счет фиксации сигналов обратной связи от рукоятки бдительности машиниста, внутреннего фонового тестирования каждого модуля, а также двухканальной обработки информации и включает в себя два модуля центральной обработки информации, модуль маршрута, модуль цифрового радиоканала, два модуля измерения параметров движения, два модуля внешних устройств, систему контроля безопасности и усилитель электропневматического клапана. Блок индикации выполнен с возможностью подготовки информации, необходимой машинисту, ее регистрации и индикации, взаимодействия с машинистом посредством рукоятки безопасности и кнопок ввода информации, введения и отображения локомотивных и поездных характеристик, текущего времени, фактической скорости и их сохранения при отключении электропитания и включает в себя модуль регистрации, модуль управления и модуль индикации. Блок коммутации выполнен с возможностью включения электропитания устройства, осуществления его связей с периферийной аппаратурой, а также переключения связей при изменении кабины управления локомотивом и включает в себя узел формирования данных о состоянии цепей управления локомотивом.
Недостатками этого устройства являются:
- отсутствие функций служебного и принудительного торможения, не позволяющее осуществить плавную остановку, а только экстренную, что может привести к нанесению вреда здоровью машиниста и пассажиров, повышенному износу и повреждению подвижного состава, рельсовых путей и т.д.;
- отсутствие функции разрешения проезда запрещающего сигнала светофора по команде, полученной от модуля РК и переданной с базовой станции, что может привести к длительным задержкам поездов и, как следствие, к повышению затрат на перевозки;
- отсутствие синхронизации данных о географических координатах, принимаемых приемником спутниковой навигации СНС, с поправками, принимаемыми модулем радиоканала от базовой станции, что приводит к снижению точности определения координат и, как следствие, к нарушению скоростных режимов работы;
- использование открытой системы реального времени, в частности системного интерфейса CAN, для связи системы безопасности движения с устройствами локомотива, что приводит к перегрузке общей информационной магистрали сообщениями не используемыми для связи между системой безопасности и устройствами локомотива.
Аналогом заявляемого изобретения по совокупности существенных признаков и функциональным возможностям является комплексное локомотивное устройство безопасности (патент на изобретение РФ №2420418, 2007 г.), содержащее включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN-интерфейсом блок электроники локомотивный, блок индикации локомотивный, блок коммутации и регистрации, блок регистрации, блок индикации скорости, блок индикации локомотивный помощника машиниста, блок согласования интерфейсов, шлюз, при этом блок электроники включает в себя: CAN-интерфейс, двухканальный модуль центральной обработки, модуль электронной карты, модуль радиоканала, двухканальный модуль внешнего устройства и двухканальный модуль измерителя параметров движения, блок индикации локомотивный включает в себя плату управления дисплеем, дисплей TFT, плату управления модулем светофоров, модуль индикации светофоров, модуль ввода, рукоятку бдительности, клавиатуру.
Недостатками этого устройства являются:
- отсутствие прицельного торможения, позволяющее производить автоматическую остановку поезда у заданной точки прицельной остановки, для ликвидации дополнительных подключений локомотива к источнику тяги;
- отсутствие использования автономных модулей, которые максимально приближены к объектам контроля и управления, с которыми они взаимодействуют с целью повышения помехоустойчивости изделия;
- использование устройств согласования цифровой информации для передачи данных, что увеличивает время обработки информации и снижает точность;
- использование разнообразных приемных устройств радиосвязи и путевых систем передачи данных, что снижает удобство обслуживания;
- отсутствие синхронизации данных о географических координатах с использованием Глобальной навигационной спутниковой системы (ГЛОНАСС), принимаемых приемником спутниковой навигации;
- отсутствие возможности получения информации от путевых генераторов системы автоматического торможения поезда (САУТ) для получения информации о маршруте приема и следования по станции, скоростях следования по маршруту и его длине, координате прицельной остановки, о действующих ограничениях скорости и занятости перегона с целью предотвращения проездов запрещающих сигналов;
- отсутствие возможности обмена данными с локомотивными устройствами, что приводит к отсутствию однообразия источников информации, к различным значениям параметров, используемых в расчетах, и невозможности реализации алгоритмов существующими локомотивными исполнительными устройствами.
Технические результаты заявляемого изобретения заключаются в повышении уровня безопасности движения поездов в маневровой и поездной работе на высокоскоростных участках, увеличении пропускной способности участков железнодорожных путей, повышении точности определения координат локомотива, добавлении функции автоматического торможения, в обеспечении более глубокой диагностики системы и обновлении программного обеспечения блоков без вскрытия аппаратуры, в осуществлении помехозащищенного приема сигналов рельсовых цепей.
Технический результат достигается тем, что локомотивная система обеспечения безопасности движения поездов (далее система), содержащая включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN-интерфейсом блок центрального вычислителя БЦВ, блок индикации локомотивный БИЛ, блок индикации локомотивный помощника машиниста БИЛ-ПМ, блок регистрации БР с кассетой регистрации КР, шлюз и внешние устройства, цифровые датчики давления ДД, электропневматический вентиль ЭПВ и приставка крана машиниста ПКМ. К блоку БИЛ подключены рукоятка бдительности РБ, рукоятка бдительности специальная РБС, рукоятка бдительности помощника машиниста РБП. К блоку БЦВ подключены внешние устройства: антенна спутниковой навигационной системы СНС и радиоантенна, электропневматический клапан ЭПК и ключ ЭПК, датчики пути и скорости ДПС, приемные катушки АЛСН и АЛС-ЕН. БЦВ включает в себя подключенные к внутреннему CAN-интерфейсу двухканальный модуль центрального вычислителя, модуль безопасного сравнения БС, выход которого соединен с усилителем ЭПК, связанного с ЭПК, модуль спутниковой навигации, вход которого соединен с антенной СНС. В систему дополнительно введены двухканальный системный CAN-интерфейс и информационно-диагностический интерфейс ИДИ, которые соединяют БЦВ и блоки каждой из кабин локомотива БИЛ, БИЛ-ПМ и автономный блок приемника сигналов локомотивный АБПС-Л, выполненный с возможностью приема через соединительную коробку сигналов АЛСН и АЛС-ЕН с приемных катушек. К блоку БИЛ подключен блок оповещения локомотивный БОЛ, а через БР подключена КР. Антенна совмещенная локомотивная АСЛ, выполненная с возможностью приема-передачи сигналов радиоканала и приема сигналов СНС. В блоке БЦВ две ячейки центрального вычислителя ЦВ, ячейка спутниковой навигации СН и ячейка платы управления подключены к двухканальному системному CAN-интерфейсу и ИДИ системы; две ячейки БС соединены между собой и подключены к ячейкам ЦВ; шлюз выполнен встраиваемой в БЦВ ячейкой, подключенной одним входом/выходом к ячейке СН, другим к ИДИ, а третьим через внутренний САN-шлюз-интерфейс к ячейкам ЦВ; ячейки плат входов и ячейки плат реле подключены к ячейке плата управления; и модуль питания. Ячейки ЦВ соединены друг с другом и с ключом ЭПК каждой из кабин локомотива, вход ячейки СН соединен с АСЛ, на входы ячейки плата управления поступают сигналы с ДПС и с цифровых ДД. На входы ячеек плат входов поступают дискретные сигналы, каждая из ячеек платы реле одним входом/выходом подключена к ячейкам БС, вторым выходом к ЭПК, а несколько других выходов подключены к ПКМ и ЭПВ, на вход ячейки шлюз через приемо-передающее устройство ППУ поступает радиосигнал с АСЛ.
В блок БЦВ вводят ячейку телеметрической системы контроля бодрствования машиниста ТСКБМ, подключаемую к ячейке шлюзов и обеспечивающую непрерывный контроль работоспособности машиниста.
В систему введен блок хвостового вагона, выполненный с возможностью определения местоположения измерением в тормозной магистрали и передачей этой информации на АСЛ.
Предусмотрено несколько исполнений ячеек шлюзов с одним или несколькими различными интерфейсами, позволяющими стыковать различные внешние системы по различным интерфейсам с внутренним САN-шлюз-интерфейсом.
На блок БИЛ поступают сигналы по Ethernet интерфейсу для индикации и записи на кассету регистрации.
В систему введена видеокамера, видеосигнал с которой поступает на блок БИЛ для записи информации на КР.
На кассету регистрации осуществляется: запись параметров движения и диагностическая информация, смена программного обеспечения, а также запись и замена электронной карты.
Сущность предложенного технического решения поясняется чертежами:
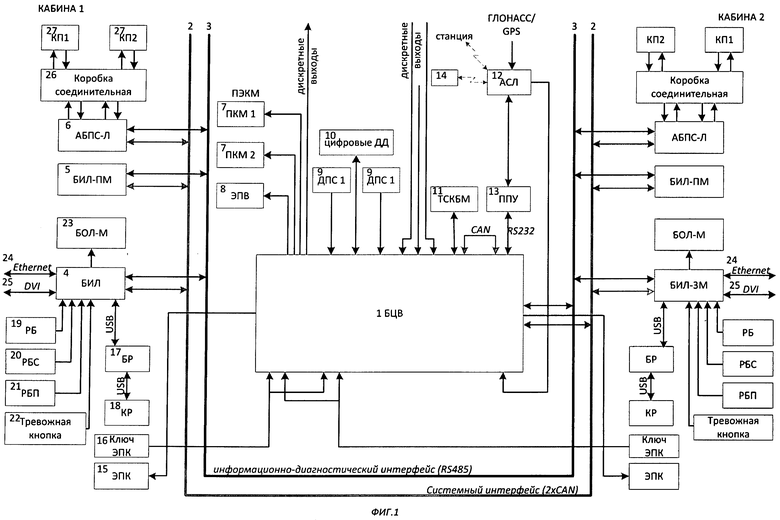
Фиг.1 - структурная схема локомотивной системы обеспечения безопасности движения поездов;
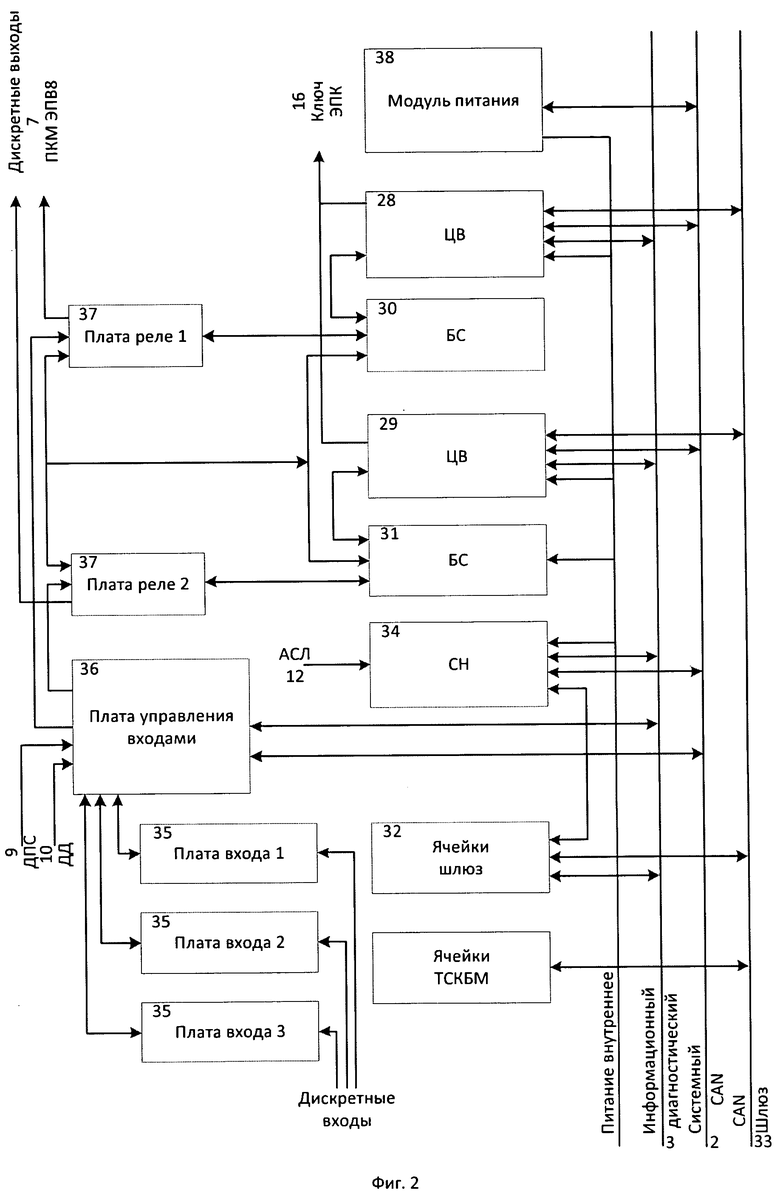
Фиг.2 - структурная схема блока центрального вычислителя.
На фиг.1 представлена структурная схема системы, содержащая блок центрального вычислителя БЦВ 1, соединенный через двухканальный системный CAN-интерфейс 2 и информационно-диагностический интерфейс ИДИ 3 с блоками, расположенными в обеих кабинах локомотива, блоком индикации локомотивным БИЛ 4, блоком индикации локомотивным помощника машиниста БИЛ-ПМ 5, автономным блоком приемников сигналов автоматической локомотивной сигнализации АБПС-Л 6, приставка крана машиниста 7 ПКМ1 (ПКМ2 для второй кабины), осуществляющая разрядку тормозной магистрали тремя ступенями и обеспечивающая управление служебным торможением поезда. Для второй кабины набор блоков идентичен. К блоку БЦВ 1 подключены внешние устройства: электропневматический вентиль ЭПВ 8, датчики пути и скорости ДПС 9, цифровые датчики давления ДД 10 (тормозной магистрали ТМ, тормозного цилиндра ТЦ и уравнительного резервуара УР на схеме не показаны), приемник телеметрической системы контроля бодрствования машиниста ТСКБМ 11, антенна совмещенная локомотивная АСЛ 12, подключаемая через приемно-передающее устройство ППУ 13 и непосредственно к блоку БЦВ 1, на АСЛ 12 поступает сигнал с блока хвостового вагона 14; электропневматический клапан ЭПК 15 и ключ 16 ЭПК.
К блоку БИЛ 4 подключены через блок регистрации БР 17 кассета регистрации КР 18, рукоятка бдительности РБ 19, рукоятка бдительности специальная РБС 20, рукоятка бдительности помощника машиниста РБП 21, тревожная кнопка ТК 22 и блок оповещения локомотивный БОЛ 23. На блок БИЛ 4 поступают сигналы по Ethernet-интерфейсу 24 для индикации и записи на КР 18 и видеосигнал 25 с видеокамеры (на схеме не показана) для записи информации на КР 18.
К автономному блоку приемников сигналов автоматической локомотивной сигнализации АБПС-Л 6 через соединительную коробку КС 26 подключены приемные катушки 27 КП (КП1 и КП2).
Блок БЦВ 1 (фиг.2) содержит две ячейки центрального вычислителя ЦВ 28 и 29, соединенные с двумя ячейками безопасного сравнения БС 30 и 31, ячейку шлюзов 32, подключенную к ИДИ 3, а через внутренний CAN-шлюз-интерфейс 33 соединена с ячейками ЦВ 28 и 29; ячейку спутниковой навигации СН 34, вход которой соединен с антенной совмещенной локомотивной АСЛ 12; ячейки плата входов 35, на которые поступают дискретные сигналы; ячейку плата управления ПУ 36, соединенную с платами входов 35, а также на нее поступают сигналы с ДПС 9 и с цифровых ДД 10; ячейки плата реле 37, одним входом/выходом соединенные между собой, подключены к ячейкам БС 30 и 31, второй выход подключен к ЭПК 15, а несколько других выходов подключены к ПКМ 7 и ЭПВ 8; модуль питания 38, предназначенный для гальванической развязки и фильтрации питающего напряжения, поступающего к ячейкам БЦВ 1; ячейка телеметрической системы контроля бодрствования машиниста ТСКБМ 39, подключаемая через внутренний CAN-шлюз-интерфейс к ячейкам шлюзов 32 и ЦВ 28 и 29.
Ячейки ЦВ 28 и 29 реализованы как двухканальные безопасные контроллеры. При включении электропитания одна ячейка определяется как рабочая, другая в «горячем» резерве. Каждая из ячеек ЦВ 28 и 29 подключается к двухканальному системному CAN-интерфейсу 2 и ИДИ 3. Также на ячейки ЦВ 28 и 29 поступают сигналы от ключей 16 ЭПК первой и второй кабин локомотива.
Ячейка БС 30 осуществляет безопасное сравнение информации, поступающей из двух каналов обработки информации ячейки ЦВ 28, формирует сигнал для управления ЭПК 15 в случае совпадения этой информации и прекращает формирование управляющих сигналов на ЭПК 15 в случае несовпадения или отсутствия данных от каналов обработки информации ячейки ЦВ 28 и формирует сигнал «Сброс». Формирует сигнал активности для ячейки ЦВ 28, а также для взаимодействия с другой ячейкой БС 31 для определения активной ячейки ЦВ.
Ячейка шлюзов 32 выполнена встраиваемой в БЦВ 1 ячейкой, подключенной одним входом/выходом к ячейке СН 34, другим к ИДИ 3, а третьим через внутренний CAN-шлюз 33 интерфейс к ячейкам ЦВ 28 и 29. В базовом случае ячейка шлюзов 32 выполняет функцию стыковки двухканального системного CAN-интерфейса 2 с внешним CAN-интерфейсом, к которому подключены сторонние системы и модули. Для реализации возможности подключения различных внешних систем по различным интерфейсам предусмотрено несколько исполнений ячеек шлюзов 32, позволяющих стыковать эти системы с двухканальным системным CAN-интерфейсом 2. Каждое исполнение ячейки шлюзов 32 реализует один или несколько различных интерфейсов с CAN-интерфейсом, что позволяет взаимодействовать с различным набором внешних интерфейсов.
В общем случае ячейки шлюзов 32 выполняют следующие основные функции: обмен информацией с внешними интерфейсами (CAN, CANOpen, RS-232/422/485, MVB, Profibus, Ethernet и другими) для взаимодействия с радиомодемами, датчиками, внешними системами и блоками; обработка информации; обмен информацией по двухканальному системному CAN-интерфейсу 2 и ИДИ 3 и гальваническая развязка и фильтрация внешних интерфейсов.
Ячейка СН 34 обеспечивает двухканальный прием, декодирование и обработку сигналов от антенного узла диапазона ГЛОНАСС/GPS антенны АСЛ 12, отсчет текущего времени с корректировкой по астрономическому времени СНС и формирует информацию для двухканального системного CAN-интерфейса 2 и ИДИ 3.
Ячейки плата входов 35, ячейка плата управления 36 и ячейки плата реле 37 объединены в модуль ввода-вывода, который предназначен для приема и обработки информации о давлении, скорости и других параметрах в виде дискретных аналоговых сигналов, а также для управления исполнительными цепями и устройствами локомотива.
Блок индикации БИЛ 4 предназначен для обмена информацией с двухканальным системным CAN-интерфейсом 2 и ИДИ 3, обеспечения функций современного универсального человеко-машинного интерфейса, реализации функций современных технических средств: аутентификации личности машиниста и видеонаблюдения. БИЛ 4 имеет на передней панели TFT дисплей, панель локомотивного светофора и модуль ввода.
Блок регистрации БР 17 предназначен для подключения кассеты регистрации КР 18 к БИЛ 4 и осуществления их информационного взаимодействия.
КР 18 предназначена для записи, хранения в обесточенном состоянии и последующего считывания информации о параметрах движения локомотива, работе локомотивной системы безопасности и подключенных к ней систем, действий машиниста, электронной карты ЭК, временных ограничений скорости на пути следования, биометрических параметров машиниста (отпечатков пальцев).
Система работает следующим образом.
Система начинает работать сразу после включения питания. Перед началом движения машинист устанавливает КР 18 в кассетоприемник блока БР 17, включает ключ ЭПК 16. Далее с клавиатуры блока БИЛ 4 вводит следующие параметры: номер машиниста, номер поезда, длину и массу поезда, направление движения, номер пути, признак правильности пути, устанавливает режим работы (поездной, маневровый, двойной тяги), и в случае, если движение будет происходить не по электронной карте, то вводит начальную координату.
После включения системы ячейки ЦВ 28 и 29 проводят опрос блоков системы для принятия решения о работоспособности блоков, полученные данные записываются в КР 18. Блок БЦВ 1 реализует такие логические функции, как контроль всех блоков системы, включение или выключение их из конфигурации по результатам контроля, контроль входных и выходных данных, формируемых в двух каналах обработки, и последующую выдачу этих данных на TFT дисплее БИЛ 4, управление ЭПК 15 по результатам выполнения технологических подпрограмм, формирование параметров, необходимых для осуществления прицельного торможения перед препятствием, и выдачу их на исполнительные устройства локомотива (дискретные выходы) и. т.д. В случае отказа блока, влияющего на безопасность движения, снимается управляющее напряжение с ЭПК 15, тем самым обеспечивается невозможность движения локомотива.
Сигналы от цифровых ДД 10 поступают на ячейку платы управления 40 блока БЦВ 1, которая производит обработку данных, вычисляет давление и передает на блок БИЛ 4 для отображения на TFT дисплее, в блок БР 17 для записи в КР 18 и в ячейки ЦВ 28 и 29 для реализации заданных режимов работы:
- защиты от несанкционированного отключения ключа ЭПК 16;
- выполнения служебного и принудительного торможения.
Сигналы АЛСН и АЛС-ЕН из рельсовой цепи через КП 27 и соединительную коробку 26 поступают в блок АБПС-Л 6, где осуществляется их фильтрация и демодуляция, декодирование и дешифрация (формируются показания локомотивного светофора, определяется количество свободных блок-участков впереди по ходу движения поезда, целевая скорость, с которой локомотив должен проследовать границу текущего блок-участка, предельно допустимая скорость движения поезда на данном блок-участке), а также осуществляет обмен информацией по двухканальному системному CAN-интерфейсу 2 и ИДИ 3, безопасное переключение между рабочим и тестовым режимами, имитация сигналов АЛСН и АЛС-ЕН на тестовом витке локомотивных катушек в тестовом режиме, преобразование сигналов с выхода приемных катушек в цифровой формат и передачу их на БИЛ 4 для индикации на TFT дисплее и для записи на КР 18.
Сигналы от ДПС 9 поступают на ячейку платы управления в блоке БЦВ 1, где происходит отделение полезного сигнала от внешних помех, формируются значения фактической скорости поезда, ускорения и пройденного пути, эти данные отображаются на TFT дисплее блока БИЛ 4 и записываются на КР 18. Далее сигналы поступают на ячейки ЦВ 28 и 29 для сравнения с допустимой скоростью и принятия решения об экстренном торможении или принятия решения о "боксовании" при превышении допустимой скорости. При принятии решения о "боксовании" решение об экстренном торможении не принимается и формируется команда "боксование", которая записывается в КР 18.
Сигналы диапазона ГЛОНАСС/GPS с АСЛ 12, поступающие на ячейку СН 37 блока БЦВ 1, декодируются и обрабатываются, осуществляется отсчет текущего времени с корректировкой по астрономическому времени СНС и формируется информация для двухканального системного CAN-интерфейса 2 и ИДИ 3. На основании этих сигналов определяются местоположение поезда, расстояние до впереди лежащего объекта и ограничение скорости проследования данного объекта. Эти данные отображаются на TFT дисплее блока БИЛ 4 и передаются на ячейки ЦВ 28 и 29.
Сигналы с АСЛ 12 УКВ диапазона через ППУ 13 поступают на ячейку шлюзов 32, где из них формируются данные об ограничениях движения на текущем участке пути и передаются в ячейки ЦВ 28 и 29. От базовой станции по этому каналу может поступать команда на разрешение проезда запрещающего сигнала светофора и команда о проведении служебного или принудительного торможения. От блока БЦВ 1 по УКВ диапазону на базовую станцию поступают данные о параметрах движения поезда (номер пути, номер поезда, число вагонов, координата поезда, значения допустимой, целевой и фактической скоростей). Ячейка шлюзов 32 формирует сигнал секундной метки, передаваемый в АСЛ 12 для обеспечения синхронизации с базовой станцией при приеме от нее дифференциальных поправок к географическим координатам. Кроме того, применение дуплексного фильтра (не показан) обеспечивает использование одной приемо-передающей радиоантенны для работы описываемой системы и возимой радиостанции РВС (не показана).
Ячейки ЦВ 28 и 29 принимают от ячеек плата входов 39, плата управления 40, шлюзов 32 и СН 34 данные о значениях допустимой и целевой скоростей на текущем блок-участке и формируют окончательное решение о значениях данных скоростей, а также на основании данных хранящихся в их энергонезависимой памяти, формируют плавное снижение данных значений скоростей для различных категорий поездов (скоростной, пассажирский, грузовой) при подъезде к запрещающему сигналу светофора, а также при подъезде к железнодорожному объекту (платформа, станция, стрелка, переезд и т.д.).
Ячейки ЦБ 28 и 29 на основании данных о значении фактической скорости, полученных от ДПС 9, и данных о давлении, полученных от цифровых ДД 10, формируют команду экстренного торможения в случаях превышения допустимой скорости, проезда запрещающего сигнала светофора или выключения ключа ЭПК 16 во время движения.
Блок БЦВ 1 принимает решение о проведении служебного торможения на основании данных, поступающих с ячейки плата управления 36, с блока АБПС-Л 4, ДПС 9, электронной карты, записанной на КР 18, с ячейки шлюзов 32, и выдает команду на ПКМ 7 о включении ЭПВ 8 в зависимости от поездной ситуации.
При получении от базовой станции по радиоканалу команды о принудительном торможении, поступающей на ячейки ЦВ 28 и 29, они формируют команду на выполнение принудительного торможения и передают ее на ячейку плата реле 37, где она усиливается и с помощью соответствующих реле происходит включение вентиля ЭПВ 8.
Ячейки плата входов 35 принимают сигналы от управляющих устройств локомотива (контроллер машиниста, компрессор, тифон, свисток, цепи включения электропневматического торможения и т.д.), проводят их первичную фильтрацию, с помощью фильтра низких частот выделяют полезные сигналы, часть из них передают на ячейки ЦВ 28 и 29. Оставшиеся сигналы преобразуют в гальванически развязанные цифровые сигналы, проводят их цифровую обработку и передают по двухканальному системному CAN-интерфейсу 2 для записи на КР 18.
При получении команды от ячеек ЦВ 28 и 29 о несанкционированном отключении ЭПК 15 ячейка плата управления 36 формирует команду на включение блока ключ ЭПК 16, при получении которой в нем срабатывает клапан, открывающий срывную полость ЭПК 15, соединенную с тормозной магистралью, тем самым производя экстренную разрядку тормозной магистрали и остановку поезда.
Блок индикации локомотивный БИЛ 4 предназначен для подготовки и индикации информации, взаимодействия с машинистом посредством рукояток бдительности РБ 19, специальной РБС 20 и помощника РБП 21 для ввода и отображения локомотивных и поездных характеристик, а также отображения сигналов светофоров, текущего времени, времени движения по графику, фактической скорости, допустимой скорости, рекомендуемой скорости, целевой скорости, ускорения, режима работы (поездной, маневровый, двойной тяги), частоты канала АЛСН или индикатора работы канала АЛС-ЕН, отображения железнодорожных координат, названий впередилежащих объектов следования и расстояния до них, данных с цифровых ДД 10, кроме того, технологической информации, необходимой для диагностики системы, индикации режима записи на КР 18.
Блок индикации локомотивный помощника БИЛ-ПМ 5 принимает данные о сигналах светофоров с блока АБПС 6 через двухканальный системный CAN-интерфейс 2 и ИДИ 3 и предназначен для отображения сигналов АЛСН и АЛС-ЕН, знака «Внимание» и фактической скорости.
Блок оповещения локомотивный БОЛ 23 подключается к БИЛ 4 и имеет внешний акустический динамик и кнопку отключения с контролем (не показаны), воспроизводит речевые сообщения, формируемые блоком БИЛ 4 при включенном тумблере, и разрывает контрольную цепь при выключенном, имеет двухпозиционный тумблер для отключения звука, при отключении звука тумблер также размыкает контрольную цепь.
ТСКБМ 11 обеспечивает контроль работоспособности машиниста по электрическому сопротивлению кожи (электродермальной чувствительности). Если при этом состояние машиниста определяется как неработоспособное, в систему передается сигнал о необходимости произвести проверку его работоспособности с помощью РБ 19. В случае неподтверждения работоспособного состояния происходит автоматическое торможение поезда. ТСКБМ 11 обеспечивает предварительную световую сигнализацию индикатором желтого цвета светодиодной линейки перед запросом на подтверждение работоспособности, в остальное время индикатор должен быть погашен. Нажатие на РБС 20, которая расположена выше остальных рукояток бдительности (для ее нажатия машинисту необходимо встать с места), учитывается как подтверждение работоспособности.
Тревожная кнопка 22 устанавливается в кабине локомотива в доступном месте и предназначена для информирования диспетчера о наличие опасной ситуации на локомотиве.
Электропитание системы строится по следующему принципу: электропитание от бортовой сети локомотива поступает на вторичные источники электропитания, которые осуществляют преобразование уровня напряжения бортовой сети в необходимый каждому блоку уровень напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ СПЕЦИАЛЬНОГО САМОХОДНОГО ПОДВИЖНОГО СОСТАВА НА КОМБИНИРОВАННОМ ХОДУ (ССПС КХ) | 2013 |
|
RU2544044C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ С АВТОНОМНЫМИ МОДУЛЯМИ | 2009 |
|
RU2398698C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ЛОКОМОТИВОМ И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2003 |
|
RU2262459C2 |
Изобретение относится к области железнодорожной автоматики, телемеханики и может быть использовано на всех типах локомотивов. Система содержит включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN-интерфейсом блок центрального вычислителя БЦВ, блок индикации локомотивный БИЛ, блок индикации локомотивный помощника машиниста БИЛ-ПМ, блок регистрации БР с кассетой регистрации КР, шлюз и внешние устройства. В систему дополнительно введены двухканальный системный CAN интерфейс и информационно-диагностический интерфейс ИДИ, которые соединяют БЦВ и блоки каждой из кабин локомотива БИЛ, БИЛ-ПМ и автономный блок приемника сигналов локомотивный АБПС-Л, выполненный с возможностью приема через соединительную коробку сигналов АЛСН и АЛС-ЕН с приемных катушек. К блоку БИЛ подключен блок оповещения локомотивный БОЛ, а через БР подключена КР. Антенна совмещенная локомотивная АСЛ выполнена с возможностью приема-передачи сигналов радиоканала и приема сигналов СНС. В блоке БЦВ две ячейки центрального вычислителя ЦВ, ячейка спутниковой навигации СН и ячейка платы управления подключены к системному CAN-интерфейсу и ИДИ системы, две ячейки БС соединены между собой и подключены к ячейкам ЦВ; шлюз выполнен встраиваемой в БЦВ ячейкой. Ячейки плат входов и ячейки плат реле подключены к ячейке платы управления. Достигается повышение уровня безопасности движения поездов. 6 з.п. ф-лы, 2 ил.
1. Локомотивная система обеспечения безопасности движения поездов, содержащая включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN-интерфейсом блок центрального вычислителя, блок индикации локомотивный, блок индикации локомотивный помощника машиниста, блок регистрации с кассетой регистрации, шлюз и внешние устройства цифровые датчики давления, электропневматический вентиль и приставку крана машиниста; к блоку индикации локомотивному подключены рукоятки бдительности и рукоятка бдительности помощника машиниста, к блоку центрального вычислителя подключены внешние устройства: антенна спутниковой навигационной системы и радиоантенна, электропневматический клапан и ключ электропневматического клапана, датчики пути и скорости, приемные катушки АЛСН и АЛС-ЕН, блок центрального вычислителя включает в себя подключенные к внутреннему CAN-интерфейсу двухканальный модуль центрального вычислителя, модуль безопасного сравнения, выход которого соединен с усилителем электропневматического клапана, связанного с электропневматическим клапаном, модуль спутниковой навигации, вход которого соединен с антенной спутниковой навигационной системы, отличающаяся тем, что в систему введены двухканальный системный CAN-интерфейс и информационно-диагностический интерфейс, которые соединяют блок центрального вычислителя и блоки каждой из кабин локомотива, блок индикации локомотивный, блок индикации локомотивный помощника машиниста и автономный блок приемника сигналов локомотивный, выполненный с возможностью приема через соединительную коробку сигналов с приемных катушек АЛСН и АЛС-ЕН, при этом к блоку индикации локомотивному подключен блок оповещения локомотивный, а через блок регистрации подключена кассета регистрации; антенна совмещенная локомотивная, выполненная с возможностью приема-передачи сигналов радиоканала и приема сигналов спутниковых навигационных систем; в блоке центрального вычислителя две ячейки центрального вычислителя, ячейка спутниковой навигации и ячейка платы управления подключены к системному CAN-интерфейсу и информационно-диагностическому интерфейсу системы; две ячейки безопасного сравнения соединены между собой и подключены к ячейкам центрального вычислителя; шлюз выполнен встраиваемой в блок центрального вычислителя ячейкой, подключенной одним входом/выходом к ячейке спутниковой навигации, другим к информационно-диагностическому интерфейсу, а третьим через внутренний CAN-шлюз-интерфейс к ячейкам центрального вычислителя; ячейки плат входов и ячейки плат реле подключены к ячейке плата управления; и модуль питания, при этом ячейки центрального вычислителя соединены друг с другом и с ключом электропневматического клапана каждой из кабин локомотива, вход ячейки спутниковой навигации соединен с антенной совмещенной локомотивной, на входы ячейки плата управления поступают сигналы с датчиков пути и скорости и с цифровых датчиков давления, а на входы ячеек плат входов поступают дискретные сигналы, каждая из ячеек платы реле одним входом/выходом подключена к ячейкам безопасного сравнения, вторым выходом к электропневматическому клапану, а несколько других выходов подключены к приставкам крана машиниста и электропневматическому вентилю, на вход ячейки шлюз через приемо-передающее устройство поступает радиосигнал с антенны совмещенной локомотивной.
2. Система по п. 1, отличающаяся тем, что в блок центрального вычислителя вводят ячейку телеметрической системы контроля бодрствования машиниста, подключаемую через внутренний CAN-шлюз-интерфейс к ячейкам шлюзов и центрального вычислителя и обеспечивающую непрерывный контроль работоспособности машиниста.
3. Система по п. 1, отличающаяся тем, что в систему введен блок хвостового вагона, выполненный с возможностью определения местоположения измерением в тормозной магистрали и передачей этой информации на антенну совмещенную локомотивную.
4. Система по п. 1, отличающаяся тем, что предусмотрено несколько исполнений ячеек шлюзов с одним или несколькими различными интерфейсами, позволяющими стыковать различные внешние системы по различным интерфейсам с внутренним CAN-шлюз-интерфейсом.
5. Система по п. 1, отличающаяся тем, что на блок индикации локомотивный поступают сигналы по Ethernet интерфейсу для индикации и записи на кассету регистрации.
6. Система по п. 1, отличающаяся тем, что в систему введена видеокамера, видеосигнал с которой поступает на блок индикации локомотивный для записи информации на кассету регистрации.
7. Система по п. 1, отличающаяся тем, что на кассету регистрации осуществляется: запись параметров движения и диагностическая информация, смена программного обеспечения, а также запись и замена электронной карты.
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| DE 19513244 A1,10.10.1996; | |||

