Изобретение относится к нефтяной промышленности и может найти применение при гидроразрыве пласта (ГРП).
Известен способ приблизительного определения длины и азимута гидравлического разрыва после его образования за счет проведения двух и более последовательных сейсмических измерений на поверхности. Способ заключается в проведении базовых сейсмических исследований с целью определения сейсмического сигнала невозмущенной формации с последующим проведением одной или нескольких сейсмических разведок, пока образовавшаяся при закачке трещина еще открыта и находится под давлением; изучение различий сейсмических сигналов позволяет определить длину и азимут трещины гидроразрыва. Сейсмический источник и группу сейсмоприемников размещают почти на одинаковом расстоянии от скважины, при этом это расстояние примерно равно половине глубины слоя, в котором осуществляется гидроразрыв (патент США №5574218, опубл. 12.11.1966 г.).
Описанный способ не позволяет эффективно определять характеристики трещины гидроразрыва, т.к. изначально направлен на регистрацию разностных сигналов, отраженных от трещины гидроразрыва вверх, которые имеют небольшие амплитуды.
Наиболее близким к предложенному изобретению по технической сущности является способ определения геометрических характеристик трещины гидроразрыва пласта, предусматривающий использование природных литологических отражателей, расположенных ниже искусственных трещин гидроразрыва. Способ предусматривает оптимизацию расположения сейсмических источников и приемников в соответствии с местонахождением отражателей и зоны исследования. Путем дифференциального измерения оттенения поперечной волны и расщепления поперечной волны, которое достигается путем вычитания сейсмического сигнала до разлома и во время разлома, можно эффективно преобразовать полученный сейсмический сигнал искусственной трещины гидроразрыва в полезные сведения о размерах и форме трещины (патент РФ №2461026, кл. Е21В 47/14, опубл. 10.09.2012).
Известный способ обладает невысокой точностью определения геометрических характеристик трещины гидроразрыва пласта.
В предложенном изобретении решается задача повышения точности определения геометрических характеристик трещины гидроразрыва пласта.
Задача решается тем, что в способе определения геометрических характеристик трещины гидроразрыва пласта, включающем расстановку сейсмических датчиков на дневной поверхности, регистрацию микросейсмических сигналов, обработку зарегистрированных сигналов, согласно изобретению расположение сейсмических датчиков производят на дневной поверхности в окрестности скважины гидроразрыва, в которой отношение «интенсивность сейсмического сигнала образования трещины гидроразрыва» / «интенсивность сейсмического шума» является максимальным, расстояния между датчиками выбирают из набора значений L=λ(n+1/2), где L - расстояние между датчиками, λ - длина волны Релея рабочей частоты, n - неотрицательное целое число, таким образом, чтобы при используемом при мониторинге гидроразрыва количестве датчиков они образовывали кольцо вокруг скважины с наружным радиусом порядка глубины проводимого гидроразрыва, рабочую частоту выбирают из предполагаемой доминантной частоты импульсов от трещины гидроразрыва пласта с учетом диапазона частот измерительной техники, значение энергии сейсмического сигнала. образованной трещиной гидроразрыва пласта в пункте наблюдения, рассчитывают численным моделированием распространения сейсмических волн от источника в центре возможной зоны распространения трещин гидроразрыва, значение энергии фонового шума замеряют на площади проведения работ сейсмическими датчиками до начала проведения работ ГРП в точке, наиболее удаленной от локальных источников шума, значение энергии шума от флота ГРП и других поверхностных источников сейсмического шума рассчитывают на основании замеров зависимости энергии шума от расстояния или исходя из предыдущих замеров энергии шума для условий, аналогичных исследуемой площади, регистрируют микросейсмические данные во время проведения ГРП, восстановление пространственного положения, времени и интенсивности сейсмических событий, сопровождающих формирование трещины гидроразрыва, производят, используя метод максимума правдоподобия для восстановления характеристик сигнала при многоканальном приеме, для чего методом численного моделирования рассчитывают форму сигнала от микросейсмических событий в точках предполагаемой области гидроразрыва, располагаемых по дискретной сетке, с дискретностью, определяемой длиной волны рабочей частоты, в узлах численной модели, соответствующих пунктам расстановки датчиков, считая каждый компонент датчика отдельным каналом, восстанавливают плотность вероятности распределения шума каждого канала каждого датчика аппроксимацией наблюденного вариационного ряда, для каждого дискретного момента времени проведения гидроразрыва для каждой точки восстановления сигнала восстанавливают наиболее правдоподобную амплитуду сейсмической эмиссии, производят финальное суммирование временных рядов в точках восстановления сигнала и пространственную интерполяцию накопленной энергии восстановленной сейсмической эмиссии с получением финальных карт распространения трещины ГРП.
Сущность изобретения
Основной проблемой наземных методов контроля гидроразрыва пласта является высокая зашумленность искомых сигналов от микросейсмических импульсов, сопровождающих образование трещины гидроразрыва, техногенными шумами от технологического оборудования, осуществляющего гидроразрыв, которое устанавливают в непосредственной близости от устья скважины. В известных аналогах не применяют специальные методы, основанные на специфических для операции гидроразрыва характеристиках сигнала и шума, максимизирующие отношение сигнал/шум в процессе регистрации, обработки и интерпретации микросейсмических сигналов, что снижает применимость, точность и достоверность результатов мониторинга.
В предложенном изобретении решается задача повышения точности определения геометрических характеристик трещины гидроразрыва пласта.
Задача решается за счет оптимизации процесса мониторинга на:
1. Полевом этапе путем оптимальной расстановки датчиков для регистрации микросейсмических сигналов в области максимального отношения сигнал/шум.
2. Этапе обработки путем восстановления пространственно-временной локализации микросейсмических шумов специализированной процедурой, основанной на методе максимального правдоподобия, устойчивой к сильному зашумлению зарегистрированного микросейсмического сигнала.
Основой для оптимизации этапов мониторинга являются суперкомпьютерная реализация численных методов моделирования распространения микросейсмических волн в геологической среде.
Этап регистрации микросейсмических сигналов
На этапе регистрации проектируют оптимальную расстановку датчиков с целью высокоточной локации очагов микросейсмических событий в зоне максимальных значений отношения сигнал/шум, рассчитанной с учетом реальных условий распределения интенсивности шумов на дневной поверхности при контроле операции гидроразрыва.
Для этого определяют рабочую частоту, на которой будет производиться регистрация сигналов. Рабочую частоту предварительно принимают равной доминантной частоте fdom импульсов от трещины гидроразрыва пласта. Доминантная частота регистрируемых событий принимается равной доминантной частоте, полученной при регистрации импульса перфорации, достигающего дневной поверхности с глубины проведения ГРП в данных геологических условиях.
Доминантная частота должна входить в рабочий диапазон применяемых для регистрации сейсмических датчиков. Если доминантная частота выше верхнего диапазона применяемых датчиков, за рабочую частоту принимают верхнюю частоту рабочего диапазона сейсмических датчиков.
Далее определяют длину волны поверхностных волн Релея для рабочей частоты по формуле

где Vr - скорость волны Релея, м/с, и fc - рабочая частота, Гц.
С целью максимального подавления шума от флота ГРП и других поверхностных источников шума минимальное расстояние между датчиками выбирают из набора значений:

где L - минимальное расстояние между датчиками, м, λ - длина волны Релея центральной частоты рабочего частотного диапазона, м, n - неотрицательное целое число. n выбирается таким образом, чтобы использующееся при мониторинге ГРП количество датчиков могло быть равномерно распределено по кольцу с наружным диаметром порядка глубины проведения гидроразрыва. Данное условие является ограничением при дальнейшем проектировании схемы наблюдения.
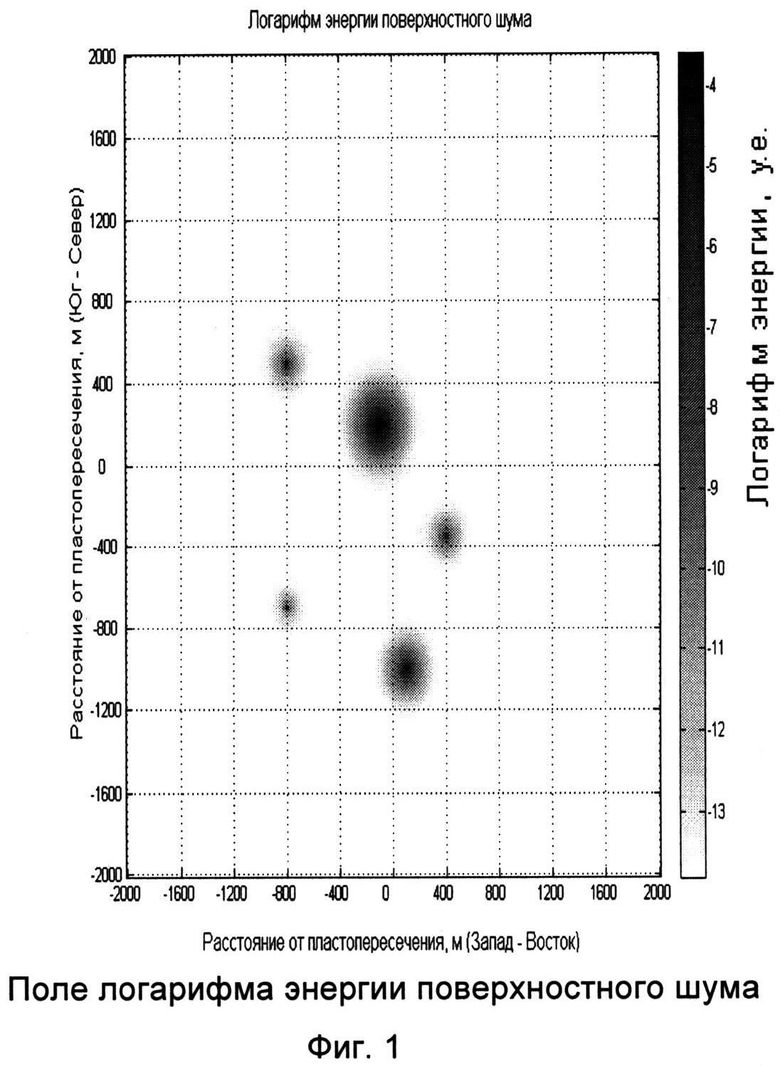
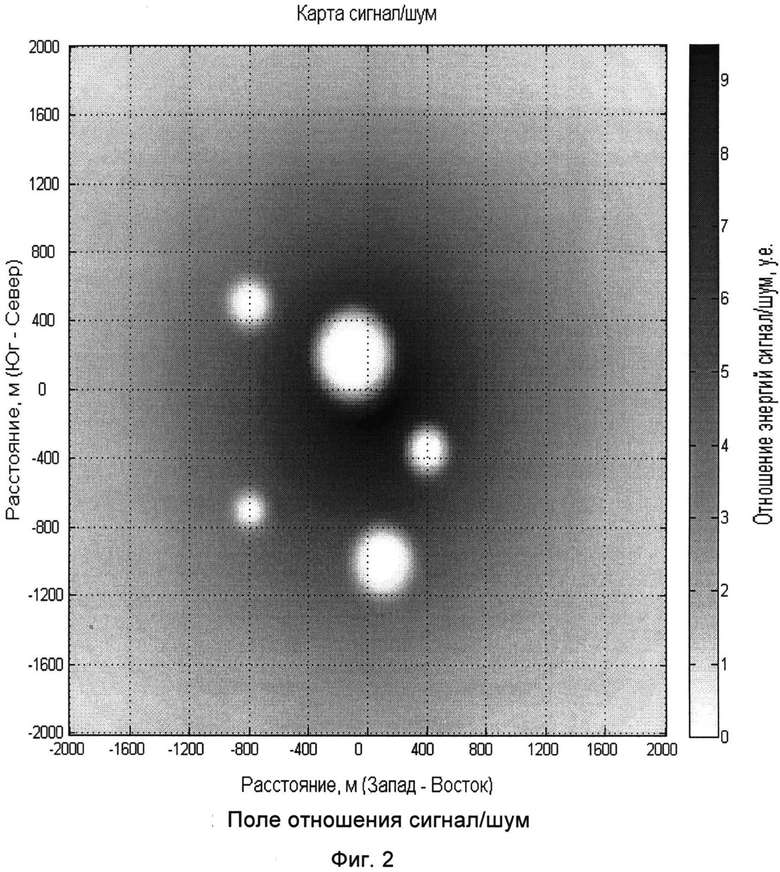
В достаточном для целей изобретения приближении сигнал от образующихся трещин при гидроразрыве можно представить преимущественно Р-волной, энергия которой от точки микросейсмического события убывает квадратично. Шум от работающего технологического оборудования на поверхности представлен преимущественно волнами Релея, энергия которого убывает по линейному закону. На дневной поверхности всегда присутствует также нелокальный микросейсмический фоновый шум, равномерно распределенный по площади исследования. Таким образом, распределение полезного сигнала и шума по поверхности неравномерно, так что существуют зоны с повышенным отношением сигнал/шум, расположение датчиков в которых наиболее информативно.
Для определения пространственного распределения поверхностного шума на площади работ до начала проведения ГРП проводят замер уровня шума локальных источников путем расстановки датчиков в окрестностях источников шума на различном расстоянии от него до выхода на фоновое значение. Полученные данные с помощью вычислительной техники аппроксимируют зависимостями вида:

где r - расстояние от источника шума (м), a - коэффициент, пропорциональный стандартному отклонению шума (м/с), b - коэффициент затухания (м-1), c - стандартное отклонение фонового шума (м/с). Уровень шума от флота ГРП определяют по замерам на предыдущих проводимых работах по мониторингу ГРП в сходных поверхностных условиях.
По результатам определения энергии источников шумов и расчета их энергии в зависимости от расстояния до них строят цифровую карту распределения энергии поверхностного шума.
Далее производят расчет распределения интенсивности микросейсмической волны на дневной поверхности (полезного сигнала) от единичного модельного микросейсмического импульса в точке, соответствующей положению ствола скважины на глубине проведения ГРП. Расчет ведут известными численными методами, например методом конечных элементов, на основе модели механических характеристик среды (плотности, модуля Юнга, коэффициента Пуассона) в районе работ. Модель механических характеристик геологической среды в окрестностях области гидроразрыва пласта получают из куба сейсмических скоростей (при наличии) либо восстанавливают путем экстраполяции данных вертикального сейсмопрофилирования или акустического каротажа по стратиграфической модели области исследований.
На основе рассчитанной интенсивности полезного сигнала и интенсивности поверхностных шумов рассчитывают карту отношения сигнал/шум.
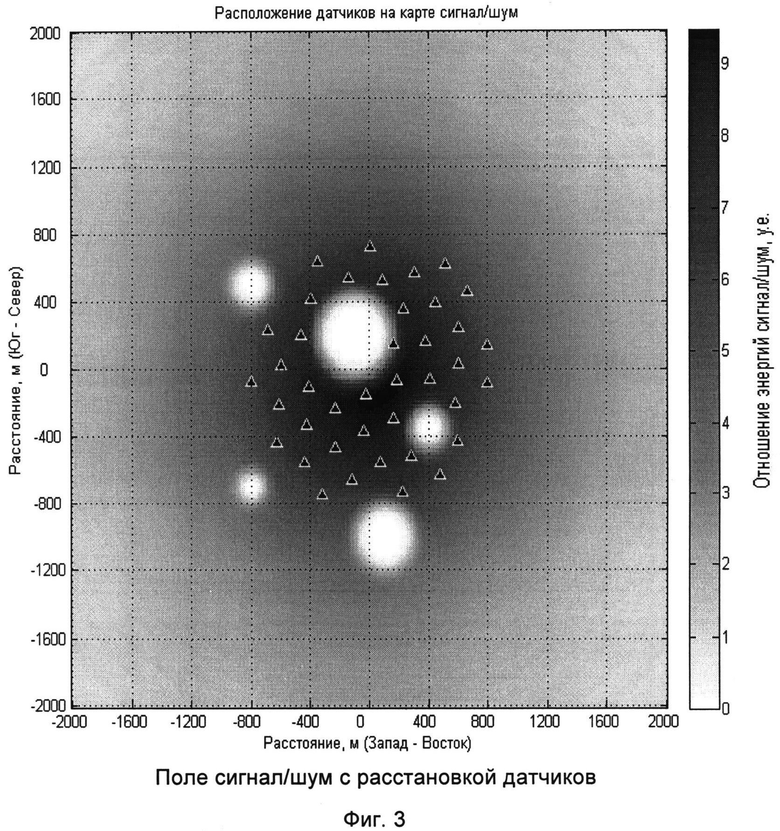
Далее, для известного количества датчиков находят субоптимальную расстановку датчиков, максимизирующую сумму отношений сигнал/шум с выдержкой минимального расстояния между датчиками согласно (2).
Для определения субоптимальной расстановки производят компьютерный поиск экстремума для функций больших размерностей, например, методом Монте-Карло. В силу неточного знания распределения параметра сигнал/шум на площади достаточно найти расстановку, близкую к оптимальной (субоптимальную).
По выбранной расстановке производят расстановку датчиков и регистрацию микросейсмических данных во время производства ГРП. Регистрацию производят сейсмологическими велосиметрами.
Этап обработки микросейсмических сигналов
На этапе обработки информации производят восстановление последовательности амплитуд произошедших микросейсмических событий в области развития трещины гидроразрыва пласта. Восстановление производят на основе метода максимального правдоподобия следующим образом.
1. Проводят расчет модельных сигналов в точках наблюдения от микросейсмических событий в точках области возможного развития трещины гидроразрыва пласта.
Расчет модельных сигналов в точках наблюдения от микросейсмических событий в точках области возможного развития трещины гидроразрыва с использованием кубов распределения упругих характеристик проводят следующим образом.
1) Определяют рабочую область пространства, в которой возможно развитие трещины гидроразрыва. Данная область для целей изобретения представляет собой квадрат со стороной, равной четырем линейным размерам трещины ГРП согласно ее дизайну с забоем в центре данного квадрата.
2) В данной области рассчитывают регулярную сеть из Μ точек восстановления сигнала с равномерным шагом по всем осям, равным или меньшим четверти длины волны рабочей частоты. Длина волны рабочей частоты рассчитывается по формуле (1).
3) Для каждой точки восстановления на сети Μ проводят моделирование распространения упругих волн от модельного микросейсма единичной интенсивности. Моделирование проводят в модельном объеме, достаточном для недопущения влияния отраженных волн за время моделирования на модельные сигналы, снимаемые в точках модели, соответствующих установленным датчикам в полевых наблюдениях.
4) Для каждой точки модели, соответствующей N установленным датчикам в полевых наблюдениях, снимают модельный сигнал отклика на единичное воздействие. Таким образом получают массив модельных сигналов (откликов модели) knm(t), где n - номер точки полевых наблюдений, m - номер точки восстановления сигнала, t - модельное время с момента воздействия, с. Отклик модели knm(t) представляет собой безразмерный набор значений амплитуд по времени моделирования из трех компонент для датчика n, которые представляют собой отклик на единичное воздействие в точке восстановления m. Дискретность представления сигналов по времени определяется исходя из выбранной рабочей частоты как

где Δt - интервал дисктеризации модельного сигнала, с, fp - рабочая частота, Гц. Таким образом, каждый сигнал от точки восстановления m до точки регистрации n представляется массивом knm(Δti).
2. Выполняют восстановление плотностей вероятностей наблюдаемых сигналов.
Для применения метода максимального правдоподобия восстанавливают распределение плотности вероятности fn(a) амплитуд регистрируемых микросейсм при отсутствии полезного сигнала, где n - номера датчиков. Данные распределения определяют из зарегистрированного сигнала на каждом n-ом датчике путем аппроксимации гистограммы распределения сигнала смесью функций, например смесью нормальных распределений.
3. Осуществляют восстановление интенсивности микросейсмических событий в точках восстановления в области возможного развития трещины гидроразрыва пласта.
Восстановление интенсивности микросейсмических событий в точках области возможного развития трещины гидроразрыва производят методом максимизации правдоподобия по оценкам плотностей вероятности сигналов fn(a). Для этого для каждого момента времени t вычисляют оценку исходной амплитуды А0 в каждой точке восстановления сигнала.
Таким образом, для каждой точки восстановления m определяют амплитуду А0, максимизирующую функцию правдоподобия:

где A - наиболее правдоподобная амплитуда исходного возмущения в точке восстановления, м/с, fn - плотности вероятности, определенные в п. 2, An(t+Δti) - амплитуда полевого сигнала (м/с) на n-ом датчике в момент времени t+Δti (с).
Повторяя данную процедуру для всех моментов времени t длительности наблюдения при мониторинге ГРП, получают восстановленный по методу максимального правдоподобия сигнал в некоторой точке восстановления m. Восстанавливая сигналы в каждой точке восстановления m, получают куб мгновенного распределения энергии восстановленного сигнала микросейсмической эмиссии во времени.
4. Производят суммирование мгновенных распределений энергии сигнала по выделенным временным интервалам, соответствующим характерным этапам ГРП (начало закачки, момент образования трещины, интервала закачки пропанта, других интервалов по необходимости) и пространственную интерполяцию накопленной энергии восстановленной сейсмической эмиссии (карты накопленной восстановленного сигнала микросейсмической активности) с получением финальных карт распространения трещины ГРП.
5. На основе полученного распределения интенсивности микросейсм определяют итоговые геометрические параметры трещины ГРП путем выделения осей концентрации накопленной микросейсмической активности.
Пример конкретного выполнения
При проведении гидроразрыва пласта в нефтедобывающей скважине выполняют определения геометрических характеристик трещины гидроразрыва пласта.
Этап регистрации
Схему наблюдения при мониторинге гидроразрыва проектируют с учетом расположения датчиков в зоне максимального отношения сигнал/шум, при этом минимальный шаг между датчиками выбирают согласно (1) и (2).
Центральную частоту рабочего диапазона fc выбирают 13.5 Гц в связи с тем, что импульс от перфорации локализуется в частотном диапазоне с данной центральной частотой. Наблюдения производят регистрирующими комплексами из трехкомпонентных широкополосных сейсмометров «LE-3DLite» и регистратора «Байкал-АСН88». Частотный диапазон датчиков от 1 до 40 Гц, таким образом, частотный диапазон аппаратуры не влияет на выбор рабочей частоты.
Скорость волны Релея в исследуемой области Vr=1150 м/с, поэтому согласно (1):
 .
.
На основе предварительных замеров фонового шума была построена аппроксимация формулами вида (3) распределения шума на площади исследования (фиг. 1). На основе скоростной модели по данным вертикального сейсмопрофилирования была построена скоростная 3D-модель исследуемой площади и проведено численное моделирование распространения волнового процесса от импульса в забое на глубине залегания целевого пласта до всех точек дневной поверхности. В результате на основе этих данных и аппроксимации распределения поверхностного шума было построено распределение отношения сигнал/шум по дневной поверхности (фиг. 2).
Количество регистрирующих комплексов составило - 28 шт. Далее согласно (2) выбрано минимальное расстояние между датчиками:
 ,
,
При n=2 минимальное расстояние между датчиками L=212 м выбрано равным 2, так как при нем датчики равномерно покрывают территорию исследования в радиусе, равном глубине залегания исследуемого пласта.
С учетом данного ограничения по расстоянию между датчиками был проведен выбор точек расположения датчиков методом Монте-Карло из 10000 случайно сгенерированных вариантов с отбором лучшего варианта по критерию сигнал/шум (фиг. 3).
Далее по данной расстановке проведена регистрация полевых сигналов в процессе проведения ГРП.
Этап обработки
По исходным данным каротажа и вертикального сейсмопрофилирования для исследуемой скважины построена математическая модель упругих характеристик (плотность, модуль Юнга и коэффициент Пуассона) сплошной среды в предположении плоскопараллельности залегания. Распространение микросейсм рассчитывалось методом конечных элементов.
Проведен расчет формы микросейсмических волн для каждого датчика на поверхности от всех точек визуализации по численной модели, для чего:
1) Определена рабочая область. Проектная длина трещины ГРП составляла 150 метров, исходя из чего рабочая область представляет собой квадрат со стороной 600 метров с забоем в центре квадрата.
2) Определена сеть точек восстановления сигналов. Длина волны согласно формуле (1) составляет 85 метров, шаг точек должен составлять четверть длины волны, таким образом, шаг регулярной сети Μ будет составлять 21,25 метра, для удобства проектирования сети округляется в меньшую сторону до 20 метров.
3) Проведено моделирование распространения сейсмических волн из каждой точки сети М.
4) Для каждой точки модели, соответствующей положению датчика на дневной поверхности, произведен съем сигнала по трем компонентам. Дискретность восстановления составляет согласно (4)
Δt=1/2fp=1/(2*13.5 Гц)=0,037 с.
5) На фиг. 4 представлен вид сигнала для точки восстановления сигнала, соответствующей центру квадрата для датчика номер 1. Для остальных комбинаций точек восстановления и датчиков произведен аналогичный расчет.
2. На основе полевых сигналов для каждого датчика были построены гистограммы амплитуды сигналов и построена аппроксимация данных гистограмм суммой из трех нормальных распределений. На фиг. 5 приведен вид зарегистрированного сигнала и аппроксимации гистограммы распределения вертикальной компоненты амплитуды f1(a) для датчика 1. Для остальных датчиков и компонент проведены аналогичные построения функции плотности вероятности.
3. На основе построенных в п. 2 распределений и полученных в п. 1 сигналов производят путем компьютерных расчетов по формуле (5) восстановление наиболее вероятной амплитуды микросейсмических сигналов для каждой точки восстановления. На фиг. 6 приведен вид восстановленной микросейсмической активности для первой тысячи отсчетов по Δt=0,037 с для точки, соответствующей центру рабочей области. Для остальных точек восстановления произведены аналогичные расчеты.
4. Для полученных амплитуд наиболее вероятной интенсивности произведено суммирование по отдельным периодам производства ГРП. На фиг. 7, части 1-5, приведены накопленные интенсивности микросейсм для различных диапазонах времени выполнения работ ГРП.
5. На основе накопленных амплитуд микросейсмической активности выделены зоны распространения трещины гидроразрыва (фиг. 7, часть 6)
- в юго-западном направлении (азимут 226°);
- в южном направлении (азимут 166°);
- в юго-восточном секторе восточнее северо-восточного направления от южной осевой линии (азимут 67°).
Таким образом, согласно предложенному способу достигнута высокая точность определения геометрических характеристик трещины гидроразрыва пласта.
Применение предложенного способа позволит решить задачу повышения точности определения геометрических характеристик трещины гидроразрыва пласта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров трещины гидроразрыва пласта | 2017 |
|
RU2649195C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ТРЕЩИНЫ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА ПО ГЕОЛОГО-ПРОМЫСЛОВЫМ ДАННЫМ | 2021 |
|
RU2769492C1 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ГИДРОРАЗРЫВА ПЛАСТА ЗАЛЕЖИ УГЛЕВОДОРОДОВ | 2006 |
|
RU2319177C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА ПРИ РАЗРАБОТКЕ МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ПРОЦЕССОВ ТЕПЛОВОГО ВОЗДЕЙСТВИЯ ПРИ РАЗРАБОТКЕ ВЫСОКОВЯЗКИХ УГЛЕВОДОРОДОВ | 2020 |
|
RU2758263C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ТРЕЩИН ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2021 |
|
RU2771648C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ЗОН РАСТРЕСКИВАНИЯ ГОРНЫХ ПОРОД В ПРОЦЕССЕ ГИДРОРАЗРЫВА | 2005 |
|
RU2282876C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ И ПАРАМЕТРОВ МЕХАНИЗМОВ ИХ ОЧАГОВ В УСЛОВИЯХ СИЛЬНЫХ СЕЙСМИЧЕСКИХ ПОМЕХ (ВАРИАНТЫ) | 2012 |
|
RU2494418C1 |
| Комплекс микросейсмического контроля разработки континентальных и шельфовых месторождений углеводородов на основе площадных систем наблюдения и суперкомпьютерных методов обработки информации | 2013 |
|
RU2618485C2 |
| МОБИЛЬНЫЙ ПОИСКОВЫЙ МЕТОД ПРОВЕДЕНИЯ ПАССИВНОЙ НИЗКОЧАСТОТНОЙ СЕЙСМОРАЗВЕДКИ | 2017 |
|
RU2648015C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МИКРОСЕЙСМИЧЕСКИХ ИСТОЧНИКОВ ПРИ ВОЗДЕЙСТВИИ ПОМЕХ | 2011 |
|
RU2451308C1 |




Изобретение относится к нефтяной промышленности и может найти применение при гидроразрыве пласта. Техническим результатом является повышение точности определения геометрических характеристик трещины гидроразрыва пласта. Предложен способ определения геометрических характеристик трещины гидроразрыва пласта проводят расстановку сейсмических датчиков на дневной поверхности, регистрацию микросейсмических сигналов, обработку зарегистрированных сигналов. Расположение сейсмических датчиков производят на дневной поверхности в области скважины гидроразрыва, в которой отношение «интенсивность сейсмического сигнала образования трещины гидроразрыва» / «интенсивность сейсмического шума» является максимальным, расстояния между датчиками выбирают из набора значений L=λ(n+1/2), где L - расстояние между датчиками, λ - длина волны Релея рабочей частоты, n - неотрицательное целое число, таким образом, чтобы при используемом при мониторинге гидроразрыва количестве датчиков они образовывали кольцо вокруг скважины с наружным радиусом порядка глубины проводимого гидроразрыва, рабочую частоту выбирают из возможностей измерительной техники, а также предполагаемой доминантной частоты импульсов от трещины гидроразрыва пласта. Значение энергии сейсмического сигнала образования трещины гидроразрыва пласта в пункте наблюдения рассчитывают численным моделированием распространения сейсмических волн от источника в центре возможной зоны распространения трещин гидроразрыва. Значение энергии фонового шума замеряют на площади проведения работ сейсмическими датчиками до начала проведения работ ГРП в точке, наиболее удаленной от источников шума. Значение энергии шума от флота ГРП и других поверхностных источников сейсмического шума рассчитывают на основании замеров зависимости энергии шума от расстояния или исходя из предыдущих замеров энергии шума для условий, аналогичных исследуемой площади. Регистрируют микросейсмические данные во время проведения ГРП. Восстановление пространственного положения, времени и интенсивности сейсмических событий, сопровождающих формирование трещины гидроразрыва производят, используя метод максимума правдоподобия для восстановления характеристик сигнала при многоканальном приеме, для чего методом численного моделирования рассчитывают форму сигнала от микросейсмических событий в точках предполагаемой области гидроразрыва, располагаемых по дискретной сетке, с дискретностью, определяемой рабочей частотой, в узлах численной модели, соответствующих пунктам расстановки датчиков, считая каждый компонент датчика отдельным каналом. Восстанавливают плотность вероятности распределения шума для каждого канала аппроксимацией наблюденного вариационного ряда. Для каждого дискретного момента времени проведения гидроразрыва для каждой точки восстановления сигнала восстанавливают наиболее правдоподобную амплитуду сейсмической эмиссии. Производят финальную фильтрацию временных рядов в точках восстановления сигнала и пространственную интерполяцию накопленной энергии восстановленной сейсмической эмиссии с получением финальных карт распространения трещины ГРП. 7 ил.
Способ определения геометрических характеристик трещины гидроразрыва пласта, включающий расстановку сейсмических датчиков на дневной поверхности, регистрацию микросейсмических сигналов и обработку зарегистрированных сигналов, отличающийся тем, что расположение сейсмических датчиков производят на дневной поверхности в окрестности скважины гидроразрыва, в которой отношение «интенсивность сейсмического сигнала образования трещины гидроразрыва» / «интенсивность сейсмического шума» является максимальным, расстояния между датчиками выбирают из набора значений λ(n+1/2), где λ -длина волны Релея рабочей частоты, n - неотрицательное целое число, таким образом, чтобы при используемом при мониторинге гидроразрыва количестве датчиков они образовывали кольцо вокруг скважины с наружным радиусом порядка глубины проводимого гидроразрыва, рабочую частоту выбирают из возможностей измерительной техники, а также предполагаемой доминантной частоты импульсов от трещины гидроразрыва пласта, значение энергии сейсмического сигнала образования трещины гидроразрыва пласта в пункте наблюдения рассчитывают численным моделированием распространения сейсмических волн от источника в центре возможной зоны распространения трещин гидроразрыва, значение энергии фонового шума замеряют на площади проведения работ сейсмическими датчиками до начала проведения работ ГРП в точке, наиболее удаленной от источников шума, значение энергии шума от флота ГРП и других поверхностных источников сейсмического шума рассчитывается на основании замеров зависимости энергии шума от расстояния или исходя из предыдущих замеров энергии шума для условий, аналогичных исследуемой площади, регистрируют микросейсмические данные во время проведения ГРП, восстановление пространственного положения, времени и интенсивности сейсмических событий, сопровождающих формирование трещины гидроразрыва производят, используя метод максимума правдоподобия для восстановления характеристик сигнала при многоканальном приеме, для чего методом численного моделирования рассчитывают форму сигнала от микросейсмических событий в точках предполагаемой области гидроразрыва, располагаемых по дискретной сетке, с дискретностью, определяемой рабочей частотой, в узлах численной модели, соответствующих пунктам расстановки датчиков, считая каждый компонент датчика отдельным каналом, восстанавливают плотность вероятности распределения шума для каждого канала аппроксимацией наблюденного вариационного ряда, для каждого дискретного момента времени проведения гидроразрыва для каждой точки восстановления сигнала восстанавливают наиболее правдоподобную амплитуду сейсмической эмиссии, производят финальное суммирование временных рядов в точках восстановления сигнала и пространственную интерполяцию накопленной энергии восстановленной сейсмической эмиссии с получением финальных карт распространения трещины ГРП.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ТРЕЩИНЫ ГИДРОРАЗРЫВА | 2011 |
|
RU2461026C1 |
| СПОСОБ ДИАГНОСТИКИ ПРОЦЕССОВ ГИДРОРАЗРЫВА ПЛАСТА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАНИЯ ТРУБНЫХ ВОЛН И МИКРОСЕЙСМИЧЕСКОГО МОНИТОРИНГА | 2010 |
|
RU2455665C2 |
| СПОСОБ ОПТИМИЗАЦИИ ПАССИВНОГО МОНИТОРИНГА ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА (ВАРИАНТЫ) | 2005 |
|
RU2318223C2 |
| US 7391675 B2, 24.06.2008 | |||
| WO 2005029130 A2, 31.03.2005 | |||
| WO 2005089404 A2, 29.09.2005 | |||

