Заявленная группа изобретений относится к области скважинной геофизики и может быть использована для обнаружения и исследования породного состава, механических и физических свойств подповерхностных структур.
Известны способы электромагнитного зондирования околоскважинного пространства устройствами, размещенными в скважинах (например, RU 71780 U1, опубл. 20.03.2008). Однако динамический диапазон таких приборов, реализованных по схеме стробоскопического преобразования отраженного сигнала в тракте приема, составляет не более 100 дБ, что позволяет применять их для оценки характеристик пород по измерениям параметров диэлектрической проницаемости только в точке измерения либо на небольших, порядка метра, расстояниях от ствола скважины для значений параметров диэлектрической проницаемости, характерных для реальных сред.
Наиболее близким аналогом заявленной группы изобретений является группа изобретений, в которой раскрыты способ и устройство радиолокационного зондирования подстилающей поверхности (RU 2490672 C1, опубл. 20.08.2013). Способ радиолокационного зондирования подстилающей поверхности заключается в формировании зондирующих импульсов с помощью газового разрядника или твердотельного генератора, излучении импульсов передающей антенной, регистрации отраженных волн приемной антенной с последующей их обработкой. Устройство для реализации этого способа включает формирователь зондирующих импульсов на газовом разряднике или твердотельный генератор, передающий блок, включающий передающую антенну, приемный блок, включающий приемную антенну, блок управления и связи с персональным компьютером.
Однако данные изобретения не предназначены для функционирования в режиме радиопросвечивания. Кроме того, известное устройство невозможно эксплуатировать в скважине, поскольку его схема, предназначенная для проведения зондирования с земной поверхности и в шахтах, не позволяет производить адекватную интерпретацию получаемых данных из-за невозможности определять ориентацию прибора в локальной системе координат, привязанной к окружающей среде, и осуществлять дистанционное управление работой прибора.
Задача, на решение которой направлена заявленная группа изобретений, заключается в проведении георадиолокационного каротажа в режимах радиозондирования и радиопросвечивания (радиотомографии) на значительном удалении (от десятков до нескольких сотен метров) от оси скважины.
Технический результат, который может быть при этом получен, заключается в повышении информативности каротажа за счет увеличения динамического диапазона сигналов, а также в расширении функциональных возможностей - то есть в возможности осуществления как радиозондирования, так и радиопросвечивания (радиотомографии), причем на значительном удалении от оси скважины.
Указанный технический результат достигается за счет того, что осуществляют формирование сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с, затем излучают видеоимпульсы передающей антенной, размещенной в диэлектрическом корпусе, в разных азимутальных направлениях в плоскости, перпендикулярной оси скважины, регистрируют видеоимпульсы блоком приемных антенн, размещенных в диэлектрическом корпусе, причем приемные антенны размещены в диэлектрическом корпусе в такой конфигурации, которая обеспечивает формирование диаграммы направленности блока приемных антенн в одном из режимов: радиозондирования и радиопросвечивания, записывают полноволновую форму зарегистрированного сигнала, представленную в виде двумерного кадра «амплитуда - время задержки», по которой оценивают азимутальную анизотропию среды, обрабатывают полученную информацию в реальном масштабе времени и визуализируют результат обработки в 4D представлении. Система для реализации данного способа содержит передающий и приемный блоки, при этом передающий блок содержит устройство, обеспечивающее формирование сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с, передатчик, одну или несколько передающих антенн, размещенных в диэлектрическом корпусе, приемный блок включает одну или несколько приемных антенн, размещенных в диэлектрическом корпусе, одно или несколько устройств согласования приемных антенн, коммутатор приемных антенн, приемник, блок управления и связи с персональным компьютером, антенну синхронизации и оптиковолоконную линию синхронизации, причем выходы устройств согласования приемных антенн соединены со входами приемника, а входы - с выходами коммутатора приемных антенн, первый вход которого соединен с выходами антенны синхронизации и оптиковолоконной линии синхронизации, вход-выход приемника соединен со входом-выходом блока управления и связи с ПК, один из выходов которого соединен со вторым входом коммутатора приемных антенн, а другой - со входом передатчика.
Заявленные изобретения базируются на технологии наземного георадара «Грот-12», который обеспечивает по результатам опытов зондирование на глубину до нескольких сотен метров и разрешающая способность которого составляет от 1 см до 10 м в зависимости от глубины.
На фиг.1 показана схема системы электромагнитного каротажа.
На фиг.2 показана схема работы системы в режимах радиозондирования - 3 и радиопросвечивания (радиотомографии) - Т.
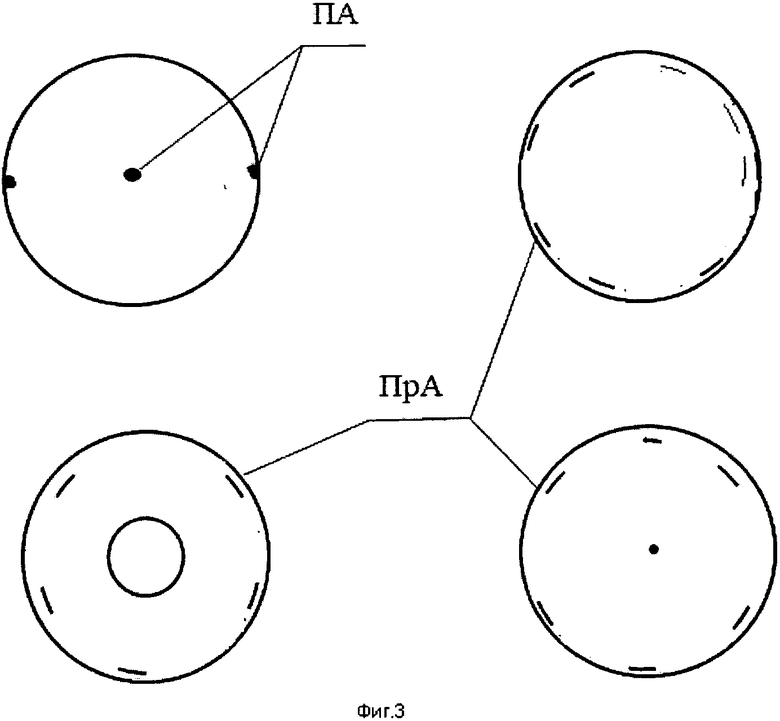
На фиг.3 показаны возможные схемы размещения передающих - ПА и приемных - ПрА антенн.
Система для георадиолокационного каротажа включает приемный и передающий блоки, которые могут быть расположены как в одной скважине (режим радиозондирования), так и в разных скважинах (режим радиопросвечивания). Приемный и передающий блоки управляются при помощи компьютера, который может быть размещен как в непосредственной близости от указанных блоков, так и на земной поверхности. Передающий блок включает устройство (не показано на чертеже), обеспечивающее формирование сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с (газовый разрядник или твердотельный генератор), передатчик (1), одну или несколько передающих антенн (2), размещенных в диэлектрическом корпусе. Приемный блок включает одну или несколько приемных антенн (3), размещенных в диэлектрическом корпусе, одно или несколько устройств согласования (4) приемных антенн, коммутатор (5) приемной антенны, приемник (6), блок (7) управления и связи с персональным компьютером, антенну синхронизации (8) и оптиковолоконную линию синхронизации (9).
Приемные антенны (3) размещают в диэлектрическом корпусе в такой конфигурации, которая обеспечивает формирование диаграммы направленности блока приемных антенн в двух режимах: радиозондирования и радиопросвечивания (фиг.2). Блок (7) управления и связи с ПК выставляет необходимые параметры приемника (6) и через коммутатор (5) подсоединяет одну из нескольких приемных антенн (3), затем выдает команду для передатчика (1) на излучение. По сигналу от блока (7) управления и связи с ПК передатчик (1) выдает на передающую антенну (2) высоковольтный сигнал в виде зондирующего сверхширокополосного видеоимпульса. Видеоимпульс через среду распространения попадает на антенну (8) синхронизации и (или) оптиковолоконную линию синхронизации (9), затем через коммутатор (5) попадает на приемные антенны (3) и далее на приемник (6), запуская цикл записи принимаемой информации от приемных антенн (3).
В режиме радиопросвечивания, когда приемный и передающий блоки размещены в разных скважинах, синхронизирующий импульс от передатчика к приемнику передается по оптиковолоконному кабелю скважины, потом по воздушной радиолинии до скважины, где находится приемник, а затем с поверхности скважины до приемника снова по кабелю.
В качестве объекта исследования используется полная волновая форма отраженного сверхширокополосного видеоимпульса, которая несет всю информацию о распределении диэлектрической проницаемости среды около скважинного пространства. Полная волновая форма представляет собой двумерный кадр «амплитуда - время задержки». Составной кадр из последовательного множества полных волновых форм является трехмерным; для измерения при движении вдоль оси скважины его координаты - это «азимутальное направление - время задержки - длина профиля» (с цветовой кодировкой амплитуды), а для измерения в точке при фиксации изменения параметров окружающей среды в условиях искусственного воздействия на нее - «азимутальное направление - время задержки - время регистрации» (с цветовой кодировкой амплитуды).
Заявленные изобретения позволят решать такие задачи, как выделение, корреляция и оконтуривание залежей нефти, оценка характера насыщения пластов различными углеводородами (нефть, газ, газогидраты), твердыми полезными ископаемыми и флюидами, в том числе с низкой пористостью и трещинно-кавернозного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490672C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244322C1 |
| СПОСОБ ГЛУБИННОЙ ГЕОРАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2816128C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ МЕСТОРОЖДЕНИЯ УГЛЕВОДОРОДОВ С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ РЕГУЛИРУЕМОГО ИСТОЧНИКА | 2003 |
|
RU2335788C2 |
| ГЛУБОКАЯ АЗИМУТАЛЬНАЯ СИСТЕМА С ПРИМЕНЕНИЕМ МНОГОПОЛЮСНЫХ ДАТЧИКОВ | 2012 |
|
RU2628000C2 |
| МОДУЛЬНЫЙ ПРИБОРНЫЙ УЗЕЛ ДЛЯ ГЕОУПРАВЛЕНИЯ | 2007 |
|
RU2394270C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА | 2015 |
|
RU2611204C1 |
| СПОСОБ ГЕОРАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2707419C1 |
| УСТРОЙСТВО СВЯЗИ | 1999 |
|
RU2185033C2 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |

Заявленная группа изобретений относится к области скважинной геофизики и может быть использована для исследования подповерхностных структур из скважин. Сущность: формируют сверхширокополосные видеоимпульсы длительностью 10-11-10-8 с. Излучают видеоимпульсы передающей антенной (2), размещенной в диэлектрическом корпусе, в разных азимутальных направлениях в плоскости, перпендикулярной оси скважины. Регистрируют видеоимпульсы блоком приемных антенн (3), размещенных в диэлектрическом корпусе. Записывают полноволновую форму зарегистрированного сигнала, представленную в виде двумерного кадра «амплитуда - время задержки», по которой оценивают азимутальную анизотропию среды. Обрабатывают полученную информацию в реальном масштабе времени. Визуализируют результат обработки в 4D представлении. Система для реализации способа содержит передающий и приемный блоки. При этом передающий блок включает устройство (не показано на чертеже), обеспечивающее формирование сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с, передатчик (1), одну или несколько передающих антенн (2), размещенных в диэлектрическом корпусе. Приемный блок включает одну или несколько приемных антенн (3) с устройствами согласования (4), размещенных в диэлектрическом корпусе, коммутатор (5), приемник (6), блок (7) управления и связи с персональным компьютером, антенну (8) синхронизации и оптиковолоконную линию (9) синхронизации. Приемные антенны (3) размещают в диэлектрическом корпусе в такой конфигурации, которая обеспечивает формирование диаграммы направленности блока приемных антенн в двух режимах: радиозондирования и радиопросвечивания. Технический результат: повышение информативности каротажа за счет увеличения динамического диапазона сигналов, а также расширение функциональных возможностей - возможность осуществления как радиозондирования, так и радиопросвечивания (радиотомографии), причем на значительном удалении от оси скважины. 2 н.п. ф-лы, 3 ил.
1. Способ георадиолокационного каротажа, заключающийся в формировании сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с, излучении видеоимпульсов передающей антенной, размещенной в диэлектрическом корпусе, в разных азимутальных направлениях в плоскости, перпендикулярной оси скважины, регистрации видеоимпульсов блоком приемных антенн, размещенных в диэлектрическом корпусе, причем приемные антенны размещены в диэлектрическом корпусе в такой конфигурации, которая обеспечивает формирование диаграммы направленности блока приемных антенн в двух режимах: радиозондирования и радиопросвечивания, записи полноволновой формы зарегистрированного сигнала, представленной в виде двумерного кадра «амплитуда - время задержки», по которой оценивают азимутальную анизотропию среды, обработке полученной информации в реальном масштабе времени и визуализации результата обработки в 4D представлении.
2. Система для реализации способа по п.1, содержащая передающий и приемный блоки, при этом передающий блок включает устройство, обеспечивающее формирование сверхширокополосных видеоимпульсов длительностью 10-11-10-8 с, передатчик, одну или несколько передающих антенн, размещенных в диэлектрическом корпусе, приемный блок включает одну или несколько приемных антенн с устройствами согласования, размещенных в диэлектрическом корпусе, одно или несколько устройств согласования приемных антенн, коммутатор приемных антенн, приемник, блок управления и связи с персональным компьютером, антенну синхронизации и оптиковолоконную линию синхронизации, причем выходы устройств согласования приемных антенн соединены со входами приемника, а входы - с выходами коммутатора приемных антенн, первый вход которого соединен с выходами антенны синхронизации и оптиковолоконной линией связи, вход-выход приемника соединен со входом-выходом блока управления и связи с ПК, первый выход которого соединен со вторым входом коммутатора приемных антенн, а второй выход - со входом передатчика.
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490672C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244322C1 |
| В.В.Варенков и др | |||
| Российские георадарные технологии в Австралии / Разведка и охрана недр, 2006, N6, стр.45-50 | |||

