Изобретение относится к радиолокации с активным ответом и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от РЛС до аэрологического радиозонда (АРЗ) импульсным методом и пеленгации его по угловым координатам, а также передачи телеметрической информации о состоянии атмосферы на РЛС и команд управления на АРЗ.
Известны РЛС с активным ответом, которые кроме определения координат АРЗ, используются также для приема и обработки метеоданных с борта АРЗ. Примером такой РЛС служит система слежения за АРЗ, разработанная английской фирмой Кроули (см. стр. 78–82, [1]; стр. 38–41, [2]). Измерение дальности до АРЗ в этой системе производится по времени задержки приема ответного радиосигнала относительно запросного, угловых координат – по данным привода антенны. По этим данным вычисляются скорость и направление ветра. Блок телеметрии РЛС декодирует принятые сигналы и регистрирует метеорологические данные о состоянии атмосферы (давлении, влажности и температуры).
Сложность, громоздкость и большое потребление энергии известной системы радиозондирования являются ее недостатками. Наличие отдельных антенн, передатчика и приемника на разные диапазоны частот (см. рис. 26, стр. 79, [1]; стр. 40, рис. 20, [2]) значительно усложняет и удорожает приемо-передающее устройство бортовой аппаратуры АРЗ, которая является по существу расходным материалом при зондировании, поскольку используется разово. Кроме того, большие габариты и вес этой аппаратуры создают угрозу безопасности для самолетов.
Предложенные в 50-е годы прошлого столетия сверхрегенеративные приемопередатчики (СПП) сначала использовались в авиационных системах опознавания «свой – чужой» (см. стр. 21, рис. 6, [1]). СПП отличаются предельной простотой конструкции, малыми весом и габаритами благодаря совмещению функций передатчика и приемника в одном каскаде – автогенераторе, работающем в сверхрегенеративном режиме. Позже СПП стали применять на борту АРЗ в качестве ответчиков в отечественных системах радиозондирования атмосферы (см. стр. 41–45, [2], авт. свид. SU115078, опубл. 01.01.1958, [3]).
Высокая чувствительность СПП к радиоимпульсному запросному сигналу позволяет сформировать ответный сигнал по дальности в виде короткой паузы в излучении приёмопередатчика при пониженной мощности запросного радиоимпульса радиопередающего устройства РЛС. Достаточно мощное излучение СПП обеспечивает надежное сопровождение АРЗ по дальности и угловым координатам, а также одновременную передачу телеметрической информации о состоянии атмосферы до расстояний 100…150 км (см. авт. свид. SU115078, опубл. 01.01.1958, [3]; стр. 61–67 [4]). Дальнейшее развитие теории и техники СПП позволило снизить мощность передатчика запросного сигнала, повысить помехоустойчивость комплекса и скрытность работы наземной РЛС при увеличении дальности сопровождения АРЗ до 250…300 км [5, 6].
Известен способ определения дальности до АРЗ, включающий подачу запросного сигала наземной РЛС на аэрологический радиозонд, его усиление и переизлучение с помощью СПП в направлении РЛС, отличающийся тем, что в качестве запросного сигнала используют когерентные радиоимпульсы РЛС, которые синхронизируют фазу радиоимпульсов СПП радиозонда, переизлучают их в направлении РЛС, выделяют из принятого излучения СПП когерентные ответные радиоимпульсы, определяют время задержки между запросными и ответными когерентными радиоимпульсами и определяют по времени задержки дальность до радиозонда (см. патент RU2304290С2 от 10.08.2007, бюл. № 22, [7]).
Однако у систем радиозондирования, использующих в качестве радиолокационного ответчика СПП, имеются их общие существенные недостатки.
1. Недостаточная чувствительность устройства в режиме приёма, которая ограничивается ударными колебаниями, присущими сверхрегенеративному режиму работы СВЧ-генератора при формировании переднего фронта радиоимпульса (см. стр. 140–146, книги [8]; фиг. 4, патента RU2345379С1, опубл. 27.01.2009, бюл. № 3, [9]; фиг. 4, патента RU2470323C1, опубл. 20.12.2012, бюл. № 35, [10]; статью [11]).
2. Асинхронность процессов формирования приёмного окна СПП и посылок запросных радиоимпульсов РЛС вызывает дополнительные флуктуации временного положения, глубины и продолжительности ответной паузы (см. фиг. 5 патента RU2368916С2, опубл. 27.09.2009, бюл. № 27, [12]; стр. 566, рис. 4.4.18, книги [6]). Этот фактор является причиной принципиально неустранимой составляющей дополнительной ошибки измерения наклонной дальности.
3. Реальное расхождение частот приема и передачи СПП из-за нестабильности параметров элементов, снижающее его чувствительность как приемника (см. фиг. 3 и 4 патента RU2172965C1, 27.08.2001, [13]; см. фиг. 5, патента RU2470323C1, 20.12.2012, бюл. № 35, [10]; статья [14])
4. Сложность настройки СПП, связанная с тем, что изменения одного из параметров влечёт изменение другого, например, регулировка условий возбуждения колебаний вызывает изменение несущей частоты, что отмечено в патенте RU2470323C1, опубл. 20.12.2012, бюл. № 35, [10].
5. Широкий спектр излучения СПП и его шумовой характер создаёт проблемы электромагнитной совместимости, например, работе систем ГЛОНАСС/GPS (см. стр. 532–537, рис. 4.3.34, [6]). Ширина спектра по уровню половинной мощности обычно составляет 6...8 МГц в зависимости от длительности формируемых радиоимпульсов (см. рис. 36, стр. 103, [15]; см. фиг. 2 патента RU2368916C2, опубл. 27.09.2009, бюл. 27, [12]).
Свободным от указанных недостатков является способ и устройство приема и обработки запросного сигнала, использующий в качестве приёмопередатчика автодинный генератор, согласно патенту RU2624993C1, опубл. 11.07.2017, бюл. № 20, [16], который принят в качестве прототипа.
Способ приема и обработки запросного сигнала устройства-прототипа в соответствие с описанием принципа его действия состоит в следующей последовательности действий. Радиоимпульс сигнала запроса передающего устройства РЛС формируют по длительности и периоду повторения, передают по радиоканалу на борт АРЗ, направляют его в резонатор автодинного генератора, смешивая с собственными колебаниями автодинного генератора, полученную смесь на нелинейности автодинного генератора преобразуют в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи смещения активного элемента, посредством блока регистрации выделяют автодинный отклик генератора в виде радиоимпульса сигнала запроса с частотой биений, после этого радиоимпульс последовательно усиливают по амплитуде, фильтруют полосовым фильтром, далее путем амплитудного детектирования преобразуют радиоимпульс в видеоимпульс сигнала запроса, сравнивают его амплитуду с пороговым уровнем, выполняют селекцию запросного сигнала по длительности и периоду повторения и формируют импульс ответной паузы, которым прерывают колебания автодинного генератора и, соответственно, излучение антенны на борту АРЗ, приемным устройством РЛС принимают сигнал АРЗ и фиксируют в нем момент прерывания излучения, сравнивают момент посылки сигнала запроса и момент приема прерывания излучения, после этого определяют время задержки между ними и по времени задержки определяют дальность до АРЗ, при этом частоту автодинного генератора модулируют сигналом радиотелеметрии для передачи метеоданных с борта АРЗ на РЛС системы радиозондирования атмосферы, причем предварительно частоту запросного сигнала РЛС отстраивают от частоты автодинного генератора на величину более полуширины полосы синхронизации автодинного генератора.
Устройство-прототип, содержит наземную базовую станцию – РЛС и АРЗ, причем РЛС состоит из импульсного передатчика и приемного устройства, связанные с антенной РЛС через антенный переключатель, а АРЗ – из последовательно подключенных антенны, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала на частоте биений, усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора запросных импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора, при этом автодинный генератор работает в режиме биений, когда частота передатчика РЛС смещена относительно частоты автодинного генератора, по крайней мере, на порядок больше, чем полуширина полосы синхронизации автодинного генератора.
Однако у прототипа и всех известных аналогов имеется существенный недостаток, который состоит в отсутствии канала передачи команд управления от РЛС на борт АРЗ, необходимого для дистанционного управления режимами работы аппаратуры и выполнения различных команд. Например, команд на изменение частоты несущего колебания, подключение или отключение какого-либо датчика метеоданных, выполнение калибровки, изменение режима кодирования телеметрической информации, а также выполнение разовой команды «Пуск» для сбрасываемого радиозонда, предназначенного для оперативного определения состояния приземных слоев локальной области атмосферы на заданном расстоянии АРЗ, что востребовано для многих служб прогноза погоды, и пр.
Таким образом, техническая проблема, на решение которой направлено заявляемое изобретение, состоит в расширении функциональных возможностей прототипа путем создания канала передачи команд управления от РЛС на борт АРЗ.
Решение указанной проблемы основано на формировании командного радиоимпульса, в качестве несущей которого используются колебания с дополнительной внутриимпульсной частотной модуляцией, применяемой в качестве поднесущей для передачи кодированных данных команд управления, а также на использовании в качестве преобразователя частоты автодинного генератора.
Для решения указанной проблемы предложен способ передачи команд управления на борт аэрологического радиозонда (АРЗ), включающий формирование в передающем устройстве РЛС командного радиоимпульса, длительность которого выбирают, по крайней мере, на порядок больше длительности запросного радиоимпульса, при этом несущую частоту командного радиоимпульса модулируют квазигармонической поднесущей, которая, в свою очередь, подвергнута дополнительной частотной или фазовой модуляции двоичным кодом команд управления, передают командный радиоимпульс по радиоканалу на борт АРЗ, направляют его в резонатор автодинного генератора, смешивая его с собственными колебаниями автодинного генератора, полученную смесь на нелинейности автодинного генератора преобразуют в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи смещения активного элемента, посредством блока регистрации выделяют автодинный сигнал в виде командного радиоимпульса на частоте биений с внутриимпульсной частотной или фазовой модуляцией двоичным кодом на квазигармонической поднесущей, после этого радиоимпульс последовательно усиливают по амплитуде, фильтруют полосовым фильтром, детектируют посредством амплитудного детектора и сравнивают амплитуду полученного видеоимпульса с пороговым уровнем, при этом квазигармоническую поднесущую командного радиоимпульса с частотой биений после фильтрации в полосовом фильтре демодулируют по частоте или фазе, получая при этом двоичную последовательность передаваемых команд управления, которую при условии превышения амплитудой видеоимпульса порогового уровня преобразуют в двоичный параллельный код, который дешифруют, разделяют на каналы и передают к исполнительным устройствам, при этом несущую частоту командного радиоимпульса предварительно отстраивают от частоты автодинного генератора АРЗ на величину, по крайней мере, на порядок больше полуширины полосы синхронизации автодинного генератора, девиацию несущей частоты командного радиоимпульса ограничивают условием ее нахождения внутри полосы пропускания фильтра, а частоту автодинного генератора модулируют сигналом радиотелеметрии.
Предложена радиолокационная система радиозондирования атмосферы для передачи команд управления на борт АРЗ реализующая способ по п.1, содержащая наземную базовую станцию – РЛС и аэрологический радиозонд – АРЗ, причем РЛС состоит из импульсного передатчика и приемного устройства, связанных с антенной РЛС через антенный переключатель, а АРЗ состоит из последовательно подключенных антенны, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала, усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора запросных импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора, при этом автодинного генератора работает в режиме биений, когда частота передатчика РЛС смещена относительно частоты автодинного генератора, по крайней мере, на порядок больше, чем полуширина полосы синхронизации автодинного генератора, отличающаяся тем, что в состав РЛС дополнительно введены последовательно соединенные кодер и модулятор поднесущей, который своим выходом подключен к входу управления частотой импульсного передатчика, а в состав АРЗ – демодулятор поднесущей и декодер, причем демодулятор поднесущей включен между выходом полосового фильтра и сигнальным входом декодера, а выход компаратора подключен к входу разрешения декодера.
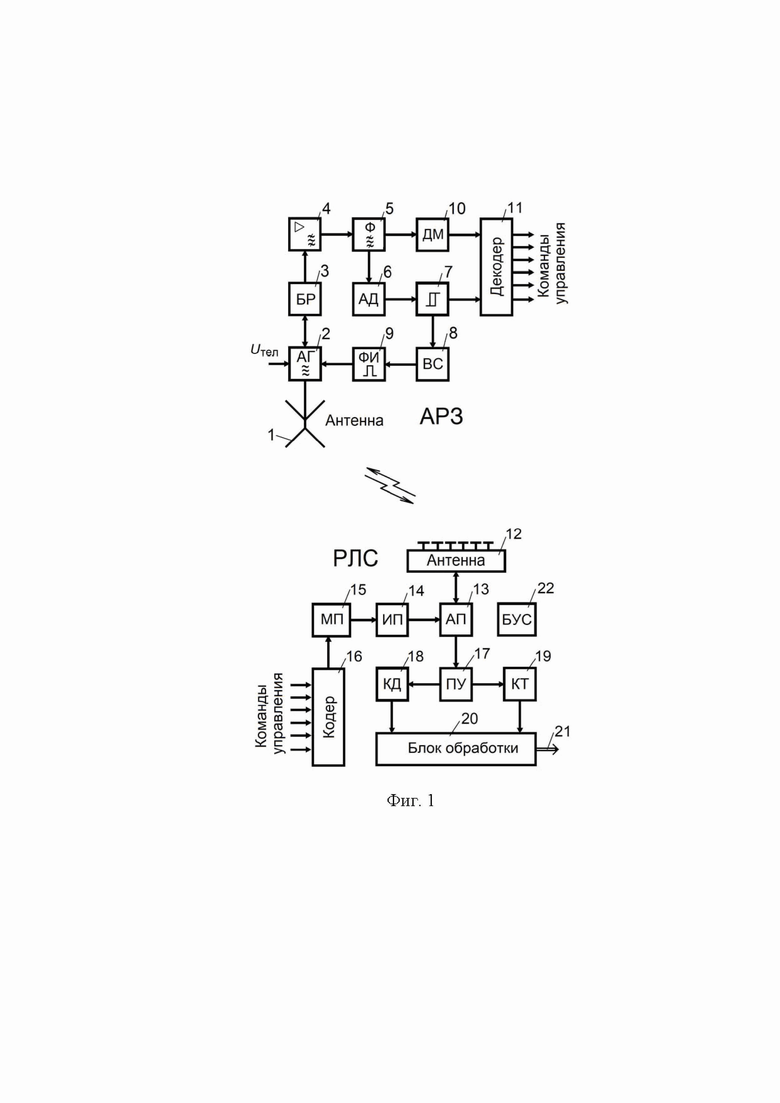
Сущность изобретения поясняется представленной на фиг. 1 структурной схемой части системы радиозондирования, которая задействована в реализации предлагаемого способа.
В состав бортовой аппаратуры АРЗ системы радиозондирования атмосферы входят (см. фиг. 1): 1 – антенна АРЗ; 2 – автодинный генератор, выполненный с возможностью электрического управления частотой генерации; 3 – блок регистрации автодинного сигнала; 4 – усилитель; 5 – фильтр; 6 – амплитудный детектор; 7 – компаратор; 8 – временной селектор; 9 – формирователь импульса ответной паузы; 10 – демодулятор поднесущей; 11 – декодер; шлейф выходных данных «Команды управления». При этом в состав РЛС системы радиозондирования атмосферы для формирования и передачи команд управления входят: 12 – антенна РЛС; 13 – антенный переключатель; 14 – импульсный передатчик; 15 – модулятор поднесущей; 16 – кодер; 17 – приемное устройство; 18 – канал «Дальности»; 19 – канал «Телеметрии»; 20 – блок обработки данных; 21 – шлейф выходных данных; шлейф входных данных «Команды управления»; 22 – блок управления и синхронизации.
Устройство передачи команд управления от РЛС на борт АРЗ с автодинным асинхронным приемопередатчиком содержит (см. фиг. 1) импульсный передатчик 14, подключенный к передающему порту антенного переключателя 13, приемный порт которого соединен с приемным устройством 17, а антенный – с антенной 12 РЛС, при этом первый и второй выходы приемного устройства 17 соответственно через канал 18 дальности и канал 19 телеметрии связаны с входами блока 20 обработки данных, а выход кодера 16 через модулятор 15 поднесущей связан с модулирующим входом импульсного передатчика 14.
Устройство приема команд управления от РЛС на борту АРЗ с автодинным асинхронным приемопередатчиком содержит (см. фиг. 1) связанный с антенной 1 АРЗ автодинный генератор 2, выполненный с возможностью электрического управления частотой, к которому подключены последовательно соединённые блок 3 регистрации автодинного сигнала, усилитель 4, фильтр 5 сигнала биений, амплитудный детектор 6, компаратор 7, временной селектор 8 и формирователь 9 импульсов ответной паузы, выход которого подключен к входу прерывания работы автодинного генератора 2, при этом второй выход компаратора 7 подключен к входу «Разрешения» декодера 11, а второй выход фильтра 5 – через демодулятор 10 поднесущей связан с сигнальным входом декодера 11.
Указанные узлы и блоки могут быть выполнены на следующих элементах и интегральных микросхемах общего применения.
Антенна 1 АРЗ может быть выполнена в виде четвертьволнового вибратора (см. фиг. 4 патента RU2214614С2, опубл. 20.10.2003, [17]). Автодинный генератор 2, выполненный с возможностью электрической перестройки частоты, может быть собран на полевом транзисторе по схеме, представленной на стр. 88, рис. 3.7 книги [18].
Блок 3 регистрации автодинного сигнала также имеет альтернативные технические решения. Например, при регистрации сигнала в цепи питания генератора 2 устройство 3 может быть выполнено в соответствие с одной из схем, представленных на рис. 14 статьи [19], или по схеме с трансформаторно-емкостной связью контуров (см. рис. 74, монографии [20]). В случае регистрации сигнала по изменению амплитуды колебаний блок 3 регистрации автодинного сигнала обычно выполняется на основе детекторного диода. Этот диод помещается непосредственно в резонатор автодинного генератора 2 или в связанную с резонатором передающую линию, как показано на фиг. 2 патента RU2295911С1, опубл. 27.03.2007, бюл. № 9, [21] и на рис. 6а и 9а статьи [19].
Усилитель 4 автодинного сигнала может быть выполнен в виде обычного полосового усилителя с линейной или логарифмической амплитудной характеристикой в рабочем диапазоне уровней сигнала (см., например, стр. 60, рис. 4.3, [22]).
В качестве полосового фильтра 5 может использоваться фильтр на поверхностных акустических волнах (ПАВ), с центральной частотой, равной частоте биений. Полоса  пропускания его, с одной стороны, определяется условиями неискаженного прохождения радиоимпульса запроса на частоте биений:
пропускания его, с одной стороны, определяется условиями неискаженного прохождения радиоимпульса запроса на частоте биений:  , где
, где  – длительность импульса (см. рис. 4.21, стр. 72, стр.241–243, [22]) и, с другой стороны, прохождением модулированных по частоте командных радиоимпульсов:
– длительность импульса (см. рис. 4.21, стр. 72, стр.241–243, [22]) и, с другой стороны, прохождением модулированных по частоте командных радиоимпульсов:  , где
, где  – девиация частоты.
– девиация частоты.
В качестве амплитудного детектора 6 может использоваться диодный амплитудный детектор, выполненный по последовательной или параллельной схеме (см. рис. 7.1, стр. 123, рис. 7.8, стр. 131, [22]). Компаратор 7 с гистерезисом может быть выполнен на микросхеме К521СА3 согласно электрической схеме, приведенной на рис. 6.7,б стр. 170, [23].
Временной селектор 8 импульсов может быть выполнен по одной из электрических схем селекторов импульсов по длительности, представленных на рис. 6.8 и описанных на стр. 117–119 книги [24], а также на стр. 509–511, 516–517, [25]. Формирователь 9 импульса ответной паузы может быть выполнен на микросхеме К564АГ1 (см. на схеме рис. 2.83а генератор G1, стр. 287–290 справочника [26]).
Демодулятор 10 поднесущей предназначен для преобразования модулированных колебаний поднесущей в сигналы логических уровней последовательного двоичного кода. Реализация демодулятора 10 поднесущей зависят от типа используемой модуляции сигнала поднесущей и выбора элементной базы. Для демодуляции сигнала поднесущей с фазовой модуляцией (ФМ) может использоваться известная аналоговая или цифровая схемы Костаса (см. рис. 8.11 на стр. 292 и рис. 8.12 на стр. 296 книги [27]), а для сигнала поднесущей с частотной модуляцией (ЧМ) – устройство для приема частотно-манипулированных сигналов согласно авт. свидетельству SU1518910A2 (опубл. 30.10.1989, бюл. № 40, [28]), квадратурный частотный детектор (см. рис. 8.20 на стр. 312 книги [27]).
Декодер 11 запросного сигнала может иметь различные технические решения, направленные на преобразование сигналов логических уровней последовательного двоичного кода в цифровой параллельный код с помощью дешифратора и его передача на выходы в виде команд управления. Кодер 16 предназначен для обратного преобразования команд управления в цифровой код. Обычно микросхемы кодеров-декодеров (кодеков) обратимые. Вопросы реализации вариантов их исполнения широко рассмотрены в патентной и технической литературе (см., например, RU2550083C1 (опубл. 10.05.2015, бюл. № 13, [29]); US20120001788A1 (опубл. 05.01.2012, [30]). Кодеки с различными параметрами и возможностями выпускаются многими фирмами в виде микросхем (см. стр. 123–130, 135–144, 249–253 справочника [31]).
Антенна 12 РЛС может быть выполнена в виде фазированной антенной решетки (см. патент RU2161847С1, опубл. 10.01.2001, [32]). Антенный переключатель 13 может быть выполнен на основе двух трехдецибельных направленных ответвителей на связанных линиях (см. стр. 193, рис. 2.54, [33]). Импульсный передатчик 14 может быть выполнен на основе автогенератора с диэлектрическим резонатором в цепи обратной связи и двухкаскадного усилителя мощности на мощных полевых или биполярных транзисторах (см. рис. 12, [5]). При этом он должен иметь частоту, отстоящую от частоты приемоответчика АРЗ на величину не менее, чем на порядок больше полуширины полосы синхронизации автодинного генератора 2. Модулятор 15 поднесущей предназначен для преобразования сигналов логических уровней последовательного двоичного кода в модулированные колебания поднесущей. Реализация модулятора 15 поднесущей зависят от типа используемой модуляции сигнала поднесущей и выбора элементной базы. Для модуляции сигнала поднесущей с бинарной фазовой модуляцией (БФМ) сигнала поднесущей и с частотной модуляцией (ЧМ) могут использоваться известные аналоговые или цифровые схемы (см. стр. 96–127, рис. 3.13, 3.17, 3.25, 3.27, 3.31, [27]).
В структурной схеме, представленной на фиг. 1, не раскрыты некоторые узлы, блоки и связи между ними, которые не являются обязательными при рассмотрении предлагаемого способа. К ним относятся, например, общая схема синхронизации РЛС, цепь управления антенным переключателем 13 и приводом антенны 12 РЛС от микропроцессорной системы управления, а также внутренние структуры импульсного передатчика 14 с системой автоматической подстройки частоты (АПЧ), приемного устройства 17, каналов измерения «Дальности» 18 и дешифрации сигналов «Телеметрии» 19, а также блока 20 обработки данных (полная структурная схема РЛС «Бриз» и «Вектор» представлена на стр. 80, [6]).
Более подробно суть предлагаемого способа рассмотрим на примере функционирования описанной выше реализации устройства.
В обычном режиме эксплуатации, когда не требуется передача на борт АРЗ команд управления, система радиозондирования атмосферы функционирует следующим образом. При подаче на устройство напряжения питания в автодинном генераторе 2 (см. фиг. 1) возникают высокочастотные колебания, которые промодулированы узкополосной частотной модуляцией (ЧМ) сравнительно «медленным» (2,4 кбит/с) сигналом телеметрии с пакетным методом передачи информации (см. патент RU2529177C1, опубл. 27.09.2014, бюл. № 27 [34]). Для этого кодированный сигнал  с метеорологическими данными от блока телеметрии (на фиг. 1 не показан) поступает на встроенный в резонатор автодинного генератора 2 варикап. Выходные колебания автодинного генератора 2 через антенну 1 АРЗ в виде электромагнитных волн излучаются на несущей частоте
с метеорологическими данными от блока телеметрии (на фиг. 1 не показан) поступает на встроенный в резонатор автодинного генератора 2 варикап. Выходные колебания автодинного генератора 2 через антенну 1 АРЗ в виде электромагнитных волн излучаются на несущей частоте  по направлению РЛС.
по направлению РЛС.
В соответствии с заложенным в работу РЛС принципом действия (см. стр. 74–87, [6]) антенна 11 РЛС принимает пришедшие от АРЗ электромагнитные волны, преобразует их в радиосигнал в виде электрических колебаний и направляет его через антенный переключатель 12 в приёмное устройство 15 РЛС. В приемном устройстве 15 радиосигнал усиливается и поступает в блоки канала приёма телеметрического сигнала 17, откуда первичные данные телеметрии следуют в блок 21 обработки.
Импульсный передатчик 13 РЛС в соответствие с импульсами запуска вырабатывает периодические (с частотой повторения около 500 Гц) посылки коротких (порядка 1 мкс) радиоимпульсов запроса, которые через антенный переключатель 12 поступают в антенну 11 РЛС и излучаются в направлении АРЗ на частоте  .
.
Принятое на борту АРЗ антенной 1 излучение преобразуется в электрические колебания, которые в виде запросных радиоимпульсов, имеющих частоту , поступают в резонатор автодинного генератора 2. Здесь они смешиваются с собственными колебаниями автодинного генератора 2, имеющими частоту . Образовавшаяся смесь колебаний, взаимодействуя на нелинейности активного элемента автодинного генератора 2, вызывает в нем автодинный эффект, который в зависимости от соотношения величины разности частот  и полуширины полосы
и полуширины полосы  синхронизации автодинного генератора 12 проявляется по-разному (см. стр. 13–24, [35]).
синхронизации автодинного генератора 12 проявляется по-разному (см. стр. 13–24, [35]).
Если разностная частота  находится в пределах полуширины полосы синхронизации , то происходит захват частоты автодинного генератора 2 воздействующим сигналом. Если разностная частота находится за пределами полуширины полосы синхронизации , когда выполняется неравенство
находится в пределах полуширины полосы синхронизации , то происходит захват частоты автодинного генератора 2 воздействующим сигналом. Если разностная частота находится за пределами полуширины полосы синхронизации , когда выполняется неравенство  , то в автодинном генераторе 2 наблюдается режим биений. В этом режиме колебания автодинного генератора 2 сопровождаются сложной амплитудно-частотной модуляцией со значительными нелинейными искажениями автодинного сигнала [36]. При этом частота
, то в автодинном генераторе 2 наблюдается режим биений. В этом режиме колебания автодинного генератора 2 сопровождаются сложной амплитудно-частотной модуляцией со значительными нелинейными искажениями автодинного сигнала [36]. При этом частота  биений равна разности между частотой воздействующего сигнала и ближайшим к ней значением частоты края полосы синхронизации, то есть
биений равна разности между частотой воздействующего сигнала и ближайшим к ней значением частоты края полосы синхронизации, то есть  .
.
В случае выполнения сильного неравенства, когда  , в автодинном генераторе 2 наблюдаются квазигармонические изменения амплитуды
, в автодинном генераторе 2 наблюдаются квазигармонические изменения амплитуды  и частоты
и частоты  колебаний
колебаний  с частотой биений
с частотой биений  (см. стр. 19, 20, [35]):
(см. стр. 19, 20, [35]):
 , (1)
, (1)
 , (2)
, (2)
где
 – мгновенные значения колебаний на выходе автодинного генератора 2;
– мгновенные значения колебаний на выходе автодинного генератора 2;
 ,
,  – соответственно амплитуда и частота колебаний автодинного генератора 2 в стационарном режиме автономных колебаний;
– соответственно амплитуда и частота колебаний автодинного генератора 2 в стационарном режиме автономных колебаний;
 – коэффициент ослабления амплитуды радиосигнала на пути его распространения от РЛС до АРЗ, приведенный к порту антенны 1 АРЗ (см. стр. 23–24 книги [1]);
– коэффициент ослабления амплитуды радиосигнала на пути его распространения от РЛС до АРЗ, приведенный к порту антенны 1 АРЗ (см. стр. 23–24 книги [1]);
 – средняя мощность радиосигнала на порте антенны 1 АРЗ;
– средняя мощность радиосигнала на порте антенны 1 АРЗ;
 – средняя мощность запросного радиосигнала РЛС;
– средняя мощность запросного радиосигнала РЛС;
 ,
,  – коэффициенты усиления антенн 11 РЛС и 1 АРЗ соответственно;
– коэффициенты усиления антенн 11 РЛС и 1 АРЗ соответственно;
 – текущее расстояние от РЛС до АРЗ;
– текущее расстояние от РЛС до АРЗ;
 – длина волны излучения АРЗ в свободном пространстве;
– длина волны излучения АРЗ в свободном пространстве;
 – скорость распространения радиоволн;
– скорость распространения радиоволн;
 ,
,  – коэффициенты автодинного усиления принимаемого сигнала и относительных отклонений частоты генерации соответственно от стационарных значений;
– коэффициенты автодинного усиления принимаемого сигнала и относительных отклонений частоты генерации соответственно от стационарных значений;
 ,
,  – углы относительного фазового смещения автодинных характеристик;
– углы относительного фазового смещения автодинных характеристик;
 ,
,  – коэффициенты неизодромности и неизохронности генератора 12 соответственно;
– коэффициенты неизодромности и неизохронности генератора 12 соответственно;
 ,
,  – КПД и внешняя добротность резонатора генератора 2;
– КПД и внешняя добротность резонатора генератора 2;
 ,
,  ,
,  – дифференциальные параметры генератора 2, определяющие его приведенную крутизну инкремента, неизохронность и неизодромность соответственно в окрестности режима стационарных колебаний.
– дифференциальные параметры генератора 2, определяющие его приведенную крутизну инкремента, неизохронность и неизодромность соответственно в окрестности режима стационарных колебаний.
Максимальные изменения амплитуды и частоты колебаний генератора 2 в выражениях (1) и (2) определяются значениями множителей перед тригонометрическими функциями. Необходимо отметить, что коэффициент автодинного усиления  при указанном множителе в (1) показывает, во сколько раз амплитуда отклика автодинного генератора 2 больше амплитуды принимаемого сигнала, причем его величина может быть
при указанном множителе в (1) показывает, во сколько раз амплитуда отклика автодинного генератора 2 больше амплитуды принимаемого сигнала, причем его величина может быть  (см. рис. 2,в,г, [35]). При этом множитель перед синусом в (2) определяет величину автодинной девиации частоты колебаний генератора 2 и численно равен полуширине
(см. рис. 2,в,г, [35]). При этом множитель перед синусом в (2) определяет величину автодинной девиации частоты колебаний генератора 2 и численно равен полуширине  его полосы синхронизации (см. стр. 25, 26, [37]):
его полосы синхронизации (см. стр. 25, 26, [37]):
 . (3)
. (3)
В результате расчета полуширины полосы синхронизации по формуле (3) при  , что соответствует случаю сильного сигнала и малого расстояния от РЛС до АРЗ (десятки метров), на частоте
, что соответствует случаю сильного сигнала и малого расстояния от РЛС до АРЗ (десятки метров), на частоте  при
при  ,
,  ,
,  и
и  получаем
получаем  , т.е. 2,37 МГц. Очевидно, что условию удовлетворяет выбор разности частот порядка
, т.е. 2,37 МГц. Очевидно, что условию удовлетворяет выбор разности частот порядка  , то есть 30 МГц и более.
, то есть 30 МГц и более.
Таким образом, за время действия запросного сигнала в одну микросекунду, в автодинном генераторе 2 при значении разности частот 30 МГц будут сформированы возмущенные колебания, модулированные по амплитуде и частоте не менее чем 30 периодами сигнала биений. В остальное время работы генератора 2 его колебания, как отмечалось выше, промодулированы сигналом телеметрии с пакетной передачей информации, скорость передачи которой (2,4 кбит/с) значительно ниже частоты сигнала биений.
Автодинные изменения величины смещения (тока или напряжения) активного элемента или амплитуды колебаний автодинного генератора 2 с помощью блока 3 регистрации автодинного сигнала преобразуются в выходной сигнал (биений) разностной частоты , который после усиления в усилителе 4 отфильтровываются по частоте полосовым фильтром 5, детектируются линейным амплитудным детектором 6 и в случае превышения порогового уровня компаратора 7 поступают на вход временного селектора импульсов 8. Временной селектор импульсов 8 при соответствии длительности и периода повторения принятых импульсов временным параметрам запросных сигналов РЛС, вырабатывает импульс, поступающий на вход формирователя 9 импульса ответной паузы.
Формирователь 9 импульса ответной паузы производит кратковременное (порядка 1…2 мкс) прерывание передачи электромагнитных колебаний от автодинного генератора 2 в антенну 1 АРЗ. Данное прерывание может достигаться в простейшем случае путём отключения питания автодинного генератора 2 или иными техническими решениями.
В соответствии с заложенным в работу РЛС принципом действия (см. стр. 74–87, [6]) по временному положению принятой радиоприёмным устройством 17 РЛС паузы в канале дальности 18 относительно момента посылки запросного радиоимпульса измеряется наклонная дальность до АРЗ. По значению наклонной дальности в блоке 20 обработка с учетом угловых координат АРЗ, получаемых от привода антенны 12 РЛС, определяются текущие координаты нахождения радиозонда.
Таким образом, предлагаемое устройство выполняет функции прототипа: передачу телеметрической информации с АРЗ на РЛС и определение дальности до АРЗ импульсным методом.
В случае передачи на борт АРЗ команд управления, которые подаются на входы кодека 16, от блока управления и синхронизации 22 поступает импульс запуска импульсного передатчика 14. При этом с выхода кодера 16 на модулятор 15 поднесущей поступает двоичная кодовая последовательность одной или нескольких команд управления. Эта последовательность в модуляторе 4 поднесущей формирует модулирующее напряжение в виде квазигармонических поднесущей на частоте порядка нескольких килогерц с фазовой или частотной модуляцией (см. стр. 233–240, [38]), которое поступает на вход управления частотой несущей импульсного передатчика 5. Сформированный таким образом командный радиоимпульс с внутриимпульсной частотной модуляцией, длительность которого в зависимости от длины цифрового кода может составлять порядка от десяти до ста микросекунд, с выхода передатчика 5 поступает через антенный переключатель 13 и антенну 12 РЛС в виде электромагнитного излучения на вход антенны 1 АРЗ.
Командный радиоимпульс, преобразованный в антенне 1 АРЗ в электрические колебания, поступает в резонатор автодинного генератора 2, смешиваясь с его собственными колебаниями. Полученная смесь колебаний на нелинейности активного элемента (АЭ) генератора преобразуется в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи питания АЭ [36, 37]. При использовании параллельного колебательного контура, настроенного на частоту биений, в качестве блока регистрации автодинного сигнала в цепи питания АЭ, происходит преобразование изменений тока в напряжение автодинного сигнала. На практике находят применение и другие электрические цепи для выделения автодинного сигнала, например, резисторы, индуктивности, трансформаторы и связанные контура [19]. Иной метод регистрации автодинного сигнала состоит в детектировании изменений амплитуды колебаний посредством детекторного диода, связанного с резонатором генератора 2 [19]. Во всех упомянутых случаях выходной сигнал блока регистрации представляет собой командный радиоимпульс на частоте биений с внутриимпульсной частотной или фазовой модуляцией двоичным кодом квазигармонической поднесущей.
Выходной сигнал блока 3 регистрации в виде колебаний на частоте биений, содержащий информацию о коде командного сигнала в виде фазовой или узкополосной частотной модуляции (см. стр. 75–128, [27]), после усиления в усилителе 4 и фильтрации полосовым фильтром 5 поступает на входы амплитудного детектора 6 и демодулятора 10. Амплитудный детектор 6 преобразует командные радиоимпульсы на частоте биений в видеоимпульсы, амплитуда которых прямо пропорциональна амплитуде радиоимпульсов, и передает их на вход компаратора 7. В случае превышения видеоимпульсами порогового уровня компаратора 7 далее они поступают на управляющий вход декодера 11 запросного кода в виде команды «разрешения», а также на вход временного селектора 8.
В демодуляторе 10 поднесущей производится преобразование сигнала на частоте биений с частотной или фазовой модуляцией поднесущей в цифровой бинарный сигнал во временной области, который в виде последовательности импульсов уровней «нуль» и «единица» далее поступает на сигнальный вход декодера 14. Декодер 14 при поступлении с выхода компаратора 7 на управляющий вход сигнала «разрешения» производит преобразование поступающей от демодулятора 10 цифровой бинарной последовательности импульсов уровней «нуль» и «единица» во временной области в параллельный код, дешифрует его и выводит на своих выходах «Команды управления» для передачи на исполнительные устройства АРЗ.
Временной селектор 8 импульсов, который по длительности и периоду повторения селектирует запросные импульсы, в данном случае на принятый командный импульс не реагирует, поскольку длительность командного видеоимпульса значительно отличается от длительности запросных импульсов. Поэтому на выходе временного селектора 8 отсутствует импульс, разрешающий запуск формирователя 9, и, соответственно, на выходе последнего импульс ответной паузы также отсутствует.
Результаты выполненных исследований транзисторного автодинного генератора на частоту 1680 МГц подтвердили осуществимость предложенного способа передачи команд управления на борт АРЗ и его пригодность для использования в перспективной разработке системы радиозондирования атмосферы [37].
Таким образом, техническая проблема, на решение которой направлено предлагаемое изобретение, а именно, создания канала передачи команд управления от РЛС на борт АРЗ при сохранении функциональных возможностей прототипа, успешно решена. Предложенное техническое решение обеспечивает возможность дистанционного управления режимами работы аппаратуры АРЗ и выполнения различных команд. Например, в случае воздействия помех работе системе радиозондирования имеется возможность по распоряжению оператора центра управления или автоматизированной системой управления РЛС передать команду управления на изменение частоты несущего колебания АРЗ. Кроме того, в изменяющихся условиях работы системы радиозондирования есть возможность вариации состава датчиков метеоданных, выполнения их калибровки, изменения режима кодирования телеметрической информации, а также передача разовой команды «Пуск» для сбрасываемого радиозонда, предназначенного для оперативного определения состояния приземных слоев локальной области атмосферы на заданном расстоянии АРЗ, что востребовано для многих служб прогноза погоды, и пр.
Литература
Смирнов Г.Д., Горбачев В.П. Радиолокационные системы с активным ответом. - М.: Воениздат, 1962. 116 с.
Хахалин В.С. Современные радиозонды. - М.: Госэнергоиздат, 1959. 65 с.
Авт. свид. SU115078, опубл. 01.01.1958. Передатчик-ответчик для радиозонда / В.С. Хахалин, Б.В. Васильев, С.Ф. Калачинский.
Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК-1. - М.: Гидрометеоиздат, 1989 г. - 148 с.
Иванов В.Э., Гусев А.В., Игнатков К.А. и др. Современное состояние и перспективы развития систем радиозондирования атмосферы в России // Успехи современной радиоэлектроники. 2015. № 9. С. 3-49.
Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств / Под ред. В.Э. Иванова - Екатеринбург: УрО РАН, 2004. - 596 с.
Патент RU2304290C2, опубл. 10.08.2007, бюл. № 22. МПК (2006.01) G01S13/95. Способ определения дальности до аэрологического радиозонда / В.Э. Иванов.
Белкин М.К., Кравченко Г.И., Скоробутов Ю.Г., Стрюков Б.А. Сверхрегенераторы. - М.: Радио и связь, 1983, 248 с.
Патент RU2345379C1, опубл. 27.01.2009, бюл. № 3. МПК (2006.01) G01S7/282. СВЧ-модуль сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов.
Патент RU2470323C1, опубл. 20.12.2012, бюл. № 35. МПК (2006.01) G01S13/95. Способ регулировки выходных параметров сверхрегенеративного приемопередатчика радиозонда / В.Э. Иванов, С.И. Кудинов, А.В. Гусев.
Кудинов С.И., Иванов В.Э. Исследование влияния флуктуационных и ударных колебаний на чувствительность сверхрегенеративных приемопередающих устройств // Ural Radio Engineering Journal. 2019. Т. 3. № 2. С. 170-194
Патент RU2368916C2, опубл. 27.09.2009, бюл. № 27. МПК (2006.01) G01S13/74. Моноимпульсная система со сверхрегенеративным ответчиком / В.Э. Иванов.
Патент RU2172965C1, опубл. 27.08.2001, бюл. № 24. МПК (2000.01) G01S13/74. Сверхрегенеративный приемопередатчик / В.Э. Иванов.
Кудинов С.И., Гусев А.В., Иванов В.Э. Исследование методов совмещения частот приёма и передачи в транзисторных сверхрегенеративных приёмопередатчиках радиозондов // 23-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо’2015). Севастополь, 2013. С. 1026-1027.
Кудинов С.И. Транзисторные сверхрегенеративные приемопередающие устройства с повышенным потенциалом в системах радиолокации и связи / Диссертация к.т.н. - Екатеринбург: УГТУ-УПИ, 2007. - 158 с.
Патент RU2624993C1, опубл. 11.07.2017, бюл. № 20. МКИ (2006.01) G01S13/74. Автодинный приёмопередатчик системы радиозондирования атмосферы / В.Я. Носков, В.Э. Иванов, К.А. Игнатков и др.
Патент RU2214614C2, опубл. 20.10.2003, МПК7 G01S7/00. Приемопередающая система аэрологического радиозонда и ее конструктив / В.Э. Иванов.
Баранов А.В., Кревский М.А. Транзисторные генераторы гармонических СВЧ колебаний. - М.: Горячая линия - Телеком, 2021. - 276 с.
Носков В.Я., Смольский С.М., Игнатков К.А., Мишин Д.Я., Чупахин А.П. Современные гибридно-интегральные автодинные генераторы микроволнового и миллиметрового диапазонов и их применение. Часть 11. Основы реализации автодинов // Успехи современной радиоэлектроники. 2019. № 2. С. 5-33.
Костылев С.А., Гончаров В.В., Соколовский И.И., Челядин А.В. Полупроводники с объемной отрицательной проводимостью в СВЧ полях: Электронные процессы и функциональные возможности. - Киев: Наук. думка, 1987. - 144 с.
Патент RU2295911C1, опубл. 27.03.2007, бюл. № 9, МПК (2006.01) A61B5/05. Способ дистанционного контроля физиологических параметров жизнедеятельности организма / Д.А. Усанов и др.
Радиоприёмные устройства / Под ред. А.П. Жуковского. М.: Высшая школа, 1989, 342 с.
Коломбет Е.А. Микроэлектронные средства обработки аналоговых сигналов. - М.: Радио и связь, 1991. - 376 с.
Щербаков В.И., Грездов Г.И. Электронные схемы на операционных усилителях: Справочник. - К.: Техника, 1983, 213 с.
Ерофеев Ю.Н. Импульсные устройства. - М.: Высшая школа, 1989, 589 с.
Шило В.Л. Популярные цифровые микросхемы: Справочник. - М.: Металлургия, 1988. - 321 с.
Галкин В.А. Цифровая мобильная радиосвязь. - М.: Горячая линия - Телеком, 2007. - 432 с.
Авт. свид. SU1518910A2, опубл. 30.10.1989, бюл. № 40, МПК4 H04L27/14. Устройство для приема частотно-манипулированного сигнала / Ю.В. Васильев и др.
Патент RU2550083C1, опубл. 10.05.2015, бюл. № 13, МПК (2006.01) G01S13/78. Устройство для декодирования запросных сигналов / Ф.Ю. Трутце и др.
Заявка US20120001788A1, опубл. 05.01.2012, МПК (2006.01) G01S13/91. Transponder decoder / L.R. Carlson et al.
Справочник: Микросхемы для телефонии и средств связи. - М.: Додека, 1998. - 400 с.
Патент RU2161847C1, опубл. 10.01.2001. МПК7 H01Q1/38. Антенная система метеолокатора / В.Э. Иванов, С.Н. Шабунин, С.Т. Князев.
Малорацкий Л.М. Микроминиатюризация элементов и устройств СВЧ. - М.: Советское радио, 1976. - 216 с.
Патент RU2529177C1, опубл. 27.09.2014, бюл. № 27. МПК (2006.01) G01S13/95. Система радиозондирования атмосферы с пакетной передачей метеорологической информации / В.Э. Иванов, А.В. Гусев, О.В. Плохих.
Демьянченко А.Г. Синхронизация генераторов гармонических колебаний. - М.: Энергия, 1976. - 240 с.
Минаев М.И. Низкочастотный спектр автодинного преобразователя частоты // Электронная техника. Сер. Электроника СВЧ. 1989. №. 7. С. 12-14.
Носков В.Я., Иванов В.Э., Гусев А.В. и др. Применение автодинов в перспективных системах радиолокационного зондирования атмосферы / Ural Radio Engineering Journal. 2022. Т. 6. № 1. С. 11-53.
Гоноровский И.С. Частотная модуляция и ее применения. М.: Связьиздат, 1948. - 283 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786729C1 |
| СПОСОБ СИНХРОННОГО ПРИЕМА И ОБРАБОТКИ ЗАПРОСНОГО СИГНАЛА В АВТОДИННОМ ПРИЕМОПЕРЕДАТЧИКЕ СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2789416C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| АВТОДИННЫЙ АСИНХРОННЫЙ ПРИЕМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2786415C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
Изобретение относится к радиолокации с активным ответом и может быть использовано в системах радиозондирования атмосферы для измерения наклонной дальности от радиолокационной станции (РЛС) до аэрологического радиозонда (АРЗ) импульсным методом и пеленгации его по угловым координатам, а также передачи телеметрической информации о состоянии атмосферы на РЛС и команд управления на АРЗ. Техническим результатом является расширение функциональных возможностей системы радиозондирования атмосферы путем создания канала передачи команд управления от РЛС на борт АРЗ. Заявленный способ передачи команд управления на борт аэрологического радиозонда (АРЗ) с автодинным асинхронным приемопередатчиком включает в себя формирование в передающем устройстве РЛС командного радиоимпульса, несущую частоту которого предварительно отстраивают от частоты автодинного генератора АРЗ на величину, по крайней мере, на порядок больше полуширины полосы синхронизации автодинного генератора, при этом модулируют несущую частоту квазигармонической поднесущей, которая, в свою очередь, подвергнута дополнительной частотной или фазовой модуляции двоичным кодом команд управления. Передают командный радиоимпульс по радиоканалу на борт АРЗ, где в резонаторе автодинного генератора его смешивают с собственными колебаниями автодинного генератора. Полученную смесь преобразуют в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи смещения активного элемента. Посредством блока регистрации выделяют автодинный отклик генератора в виде командного радиоимпульса на частоте биений с внутриимпульсной частотной или фазовой модуляцией двоичным кодом квазигармонической поднесущей. После этого радиоимпульс последовательно усиливают по амплитуде, фильтруют полосовым фильтром, преобразуют в видеоимпульс и сравнивают его амплитуду с пороговым уровнем. При этом после фильтрации командного радиоимпульса с частотой биений демодулируют его квазигармоническую поднесущую по частоте или фазе, получая при этом двоичную последовательность передаваемых команд управления, которую при условии превышения амплитудой видеоимпульса порогового уровня преобразуют в двоичный параллельный код, который дешифруют и разделяют на каналы для передачи к исполнительным устройствам. Заявлена также радиолокационная система радиозондирования атмосферы для передачи команд управления на борт АРЗ, реализующая способ. 2 н. и 4 з.п. ф-лы, 1 ил.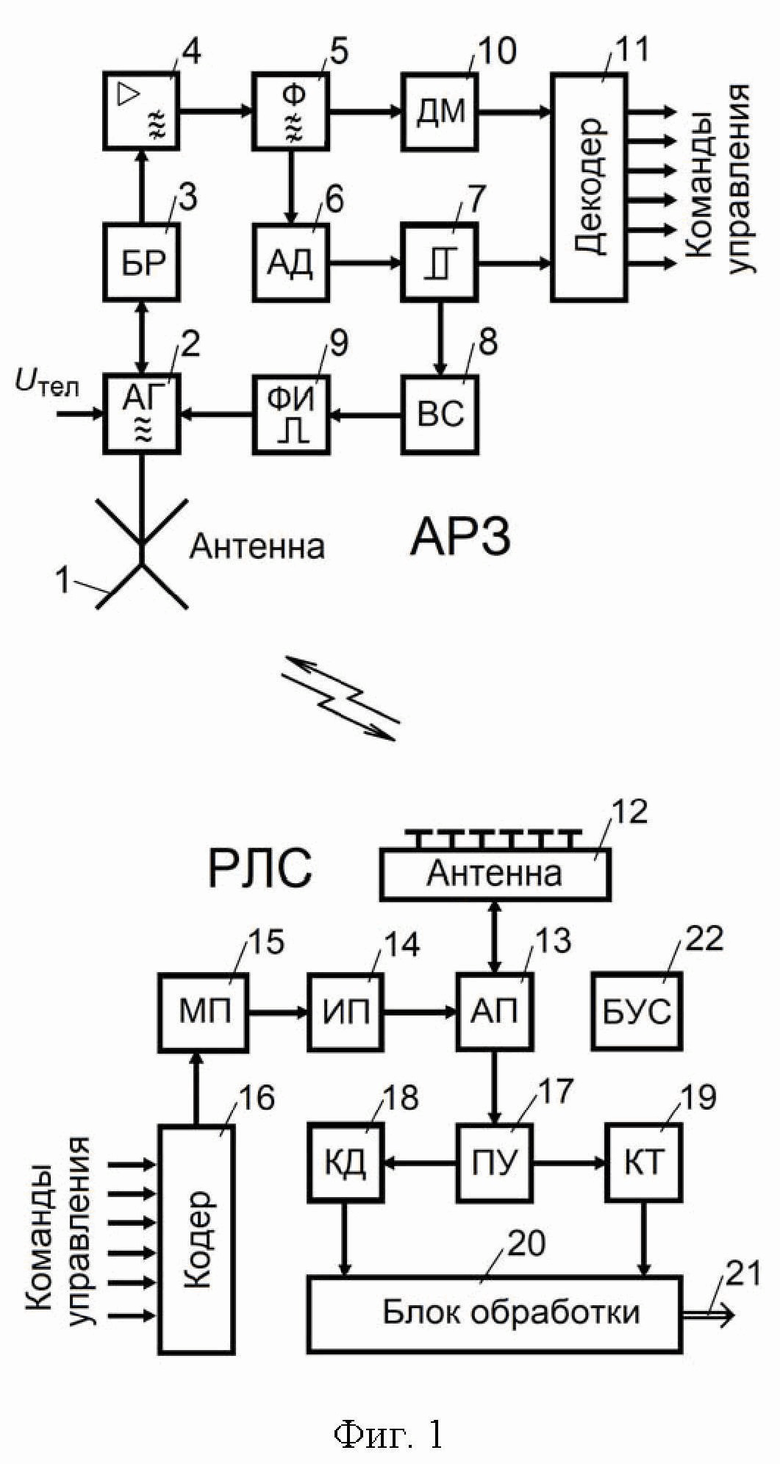
1. Способ передачи команд управления на борт аэрологического радиозонда (АРЗ), включающий формирование в передающем устройстве РЛС командного радиоимпульса, длительность которого выбирают, по крайней мере, на порядок больше длительности запросного радиоимпульса, при этом несущую частоту командного радиоимпульса модулируют квазигармонической поднесущей, которая, в свою очередь, подвергнута дополнительной частотной или фазовой модуляции двоичным кодом команд управления, передают командный радиоимпульс по радиоканалу на борт АРЗ, направляют его в резонатор автодинного генератора, смешивая его с собственными колебаниями автодинного генератора, полученную смесь на нелинейности автодинного генератора преобразуют в автодинный отклик в виде изменений с частотой биений амплитуды и частоты колебаний, а также среднего значения тока и напряжения в цепи смещения активного элемента, посредством блока регистрации выделяют автодинный сигнал в виде командного радиоимпульса на частоте биений с внутриимпульсной частотной или фазовой модуляцией двоичным кодом на квазигармонической поднесущей, после этого радиоимпульс последовательно усиливают по амплитуде, фильтруют полосовым фильтром, детектируют посредством амплитудного детектора и сравнивают амплитуду полученного видеоимпульса с пороговым уровнем, при этом квазигармоническую поднесущую командного радиоимпульса с частотой биений после фильтрации в полосовом фильтре демодулируют по частоте или фазе, получая при этом двоичную последовательность передаваемых команд управления, которую при условии превышения амплитудой видеоимпульса порогового уровня преобразуют в двоичный параллельный код, который дешифруют, разделяют на каналы и передают к исполнительным устройствам.
2. Способ по п. 1, отличающийся тем, что частоту автодинного генератора на борту АРЗ модулируют сигналом радиотелеметрии.
3. Способ по п. 1, отличающийся тем, что девиацию несущей частоты командного радиоимпульса ограничивают условием ее нахождения внутри полосы пропускания фильтра.
4. Способ по п. 1, отличающийся тем, что несущую частоту командного радиоимпульса предварительно отстраивают от частоты автодинного генератора АРЗ на величину, по крайней мере, на порядок больше полуширины полосы синхронизации автодинного генератора.
5. Радиолокационная система радиозондирования атмосферы для передачи команд управления на борт АРЗ, реализующая способ по п. 1, содержащая наземную базовую станцию – РЛС и аэрологический радиозонд – АРЗ, причем РЛС состоит из импульсного передатчика и приемного устройства, связанных с антенной РЛС через антенный переключатель, а АРЗ состоит из последовательно подключенных антенны, автодинного генератора, выполненного с возможностью электрического управления частотой, блока регистрации автодинного сигнала, усилителя, полосового фильтра, амплитудного детектора, компаратора, временного селектора запросных импульсов и формирователя импульсов ответной паузы, который своим выходом подключен к входу отключения автодинного генератора, при этом автодинный генератор работает в режиме биений, когда частота передатчика РЛС смещена относительно частоты автодинного генератора, по крайней мере, на порядок больше, чем полуширина полосы синхронизации автодинного генератора, отличающаяся тем, что в состав РЛС дополнительно введены последовательно соединенные кодер и модулятор, который своим выходом подключен к входу управления частотой импульсного передатчика, при этом кодер и модулятор выполнены с возможностью модулирования несущей частоты командного радиоимпульса квазигармонической поднесущей и осуществления дополнительной частотной или фазовой модуляции квазигармонической поднесущей двоичным кодом команд управления, а в состав АРЗ – демодулятор и декодер, причем демодулятор включен между выходом полосового фильтра и сигнальным входом декодера, а выход компаратора подключен к входу разрешения декодера, при этом демодулятор и декодер выполнены с возможностью демодулирования квазигармонической поднесущей командного радиоимпульса с частотой биений после фильтрации в полосовом фильтре по частоте или фазе, получения при этом двоичной последовательности передаваемых команд управления, преобразования её при условии превышения амплитуды видеоимпульса порогового уровня в двоичный параллельный код с его последующим дешифрованием.
6. Радиолокационная система радиозондирования атмосферы по п. 5, отличающаяся тем, что автодинный генератор выполнен с возможностью прерывания работы подачей выходного импульса от формирователя импульса ответной паузы.
| АВТОДИННЫЙ ПРИЁМОПЕРЕДАТЧИК СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2624993C1 |
| АЭРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С ЗАЩИЩЁННЫМ КАНАЛОМ СВЯЗИ | 2019 |
|
RU2738438C2 |
| US 5486830 A, 23.01.1996 | |||
| ЗАЖИМНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ БУРИЛЬНЫХ ТРУБ ПРИ СПУСКО-ПОДЪЕМНЫХ РАБОТАХ | 1947 |
|
SU71778A1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| РЕКЛАМНОЕ УСТРОЙСТВО | 1938 |
|
SU56001A1 |
| НОСКОВ В.Я., ИВАНОВ В.Э., ГУСЕВ А.В., ИГНАТКОВ К.А., КНЯЗЕВ С.Т., КУДИНОВ С.И., МАЛЫГИН И.В., ПЛОХИХ О.В., ПОНОМАРЕВ О.П., ЧЕРНЫХ О.А | |||
| Применение автодинов в перспективных системах | |||
