Область техники, к которой относится изобретение
Изобретение относится к движительному устройству в корабле согласно преамбуле п. 1 формулы изобретения.
Устройство предназначено для использования в кораблях, предусмотренных с двумя движительными агрегатами, расположенными бок о бок у кормы корабля. Движительные агрегаты расположены на противоположных сторонах средней линии корпуса корабля. Такая система с двумя движительными агрегатами используется, например, в пассажирских кораблях, пассажирских паромах, грузовых кораблях, баржах, нефтяных танкерах, ледоколах, шельфовых кораблях и военных кораблях. Особенно большие корабли, например крейсеры, танкеры, перевозящие нефть или сжиженный природный газ, корабли для перевозки автотранспорта, контейнерные корабли и паромы используют систему с двумя движительными агрегатами.
Предпосылки создания изобретения
В публикации WO 98/54052 описан корабль с двумя гребными винтами и двумя рулями Шиллинга, то есть с соответствующим рулем для каждого гребного винта. Каждый руль установлен с возможностью поворота посредством соответствующего вала, имеет луковицеобразную носовую часть, утоненную среднюю часть и расширяющийся хвост. Расширяющийся хвост расширяется наружу, по существу, только на внутренней стороне каждого руля, то есть на стороне, которая обращена к другой рулевой паре. Каждый руль имеет верхнюю пластину и нижнюю пластину, причем пластины имеют гораздо большую протяженность на внутренней стороне, чем на наружной стороне, причем пластины выровнены с линиями обтекания от соответствующего гребного винта, и нижняя пластина имеет наклоненную вниз часть на внутренней стороне. Рули как бы образуют что-то вроде угла обратного схождения по отношению к средней линии корпуса.
В патенте США 7033234 описан способ руления планирующей лодкой с V-образным дном с двумя независимо рулящими приводами с подводными корпусами, которые простираются вниз от дна лодки. При движении со скоростью планирования прямо вперед подводные корпусы устанавливаются с так называемым углом схождения, то есть с наклоном друг к другу с противоположными углами равной величины относительно средней линии лодки. При повороте лодки внутренний привод устанавливается с большим углом руления, чем наружный привод.
В публикации патента Японии 2006007937 описано устройство в корабле с двумя гондолами с противоположно вращающимися гребными винтами, расположенными у кормы корабля. Первая гондола в первом варианте осуществления установлена неподвижно в скег так, что линия вала наклонена вверх. Вторая гондола прикреплена посредством горизонтальной оси к рулевому столу, причем этот рулевой стол вращается вокруг вертикальной оси, при этом этот рулевой стол может быть опущен или поднят посредством гидравлических цилиндров. Линия вала второй гондолы выровнена с линией вала первой гондолы. Задний конец первой гондолы во втором варианте осуществления прикреплен с горизонтальной осью к скегу, и передний конец первой гондолы прикреплен к вертикальному цилиндру. Таким образом, наклон первой гондолы может быть отрегулирован цилиндром. Обе гондолы в третьем варианте осуществления прикреплены к противоположным концам общей рамы, причем эта рама прикреплена от средней части горизонтальной оси к рулевому столу, причем этот рулевой стол вращается вокруг вертикальной оси, при этом этот рулевой стол может быть опущен или поднят посредством гидравлических цилиндров. В этом устройстве нет отдельного руля, и руление корабля выполняется либо посредством вращения только второй гондолы, расположенной после первой гондолы в направлении приведения корабля, вокруг вертикальной оси, либо посредством вращения обеих гондол вокруг вертикальной оси.
Краткое изложение сущности изобретения
Целью изобретения является улучшение движительных устройств предшествующего уровня техники, основанных на двух, расположенных бок о бок движительных агрегатах в кораблях.
Движительное устройство согласно изобретению отличается признаками в отличительной части п. 1 формулы изобретения.
Движительное устройство содержит два движительных агрегата, расположенных бок о бок у кормы корабля у противоположных сторон средней линии корпуса корабля. Каждый движительный агрегат содержит полую поддерживающую структуру, прикрепленную к корпусу, камеру, прикрепленную к поддерживающей структуре, электрический двигатель внутри камеры, гребной винт у переднего конца камеры, причем упомянутый гребной винт присоединен через вал к электрическому двигателю, и поддерживающийся с возможностью поворота руль у заднего конца камеры.
Каждый движительный агрегат согласно изобретению установлен в положении обратного схождения, образуя угол горизонтального наклона в диапазоне 0,5°-6° по отношению к средней линии корпуса. Таким образом, передний конец камеры наклонен от средней линии корпуса корабля, и задний конец камеры наклонен к средней линии корпуса корабля.
Это устройство движительных агрегатов с обратным схождением улучшает угол потока воды, входящего к гребным винтам, что улучшает эффективность гребного винта.
Устройство с обратным схождением также уменьшает шум и вибрации, которые являются причиной кавитации, так как улучшенный угол потока воды, входящего к гребным винтам, уменьшает кавитацию.
Устройство с обратным схождением также уменьшает вибрации и силы линии вала. Причиной этого является факт того, что на гребные винты воздействуют менее ассиметричные силы, когда угол потока воды, входящего к гребным винтам, улучшается. Уменьшенные нагрузки и вибрации увеличат срок службы подшипников валов, а также других компонентов, подверженных воздействию этих вибраций и сил.
В преимущественном варианте осуществления изобретения движительные агрегаты дополнительно наклонены в вертикальной плоскости, чтобы передний конец камеры был расположен ниже, чем задний конец камеры по отношению к ватерлинии. Углы вертикального наклона движительного агрегата дополнительно улучшают угол потока воды, входящего к гребным винтам движительных агрегатов, посредством этого дополнительно улучшая эффективность движительных агрегатов.
Изобретение может быть использовано в больших кораблях, предусмотренных с двумя движительными агрегатами, расположенными бок о бок у кормы корабля, таких как, например, крейсеры, танкеры, перевозящие нефть или сжиженный природный газ, корабли для перевозки автотранспорта, контейнерные корабли или паромы. Мощность каждого движительного агрегата в таких больших кораблях составляет по меньшей мере порядка 1 МВт.
Краткое описание чертежей
Далее подробно описаны некоторые конкретные варианты осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
на фиг. 1 показано движительное устройство предшествующего уровня техники;
на фиг. 2 показано движительное устройство согласно изобретению;
на фиг. 3 показан вид сбоку одного варианта осуществления движительного устройства согласно изобретению;
на фиг. 4 показан вид сверху движительного устройства согласно фиг. 3;
на фиг. 5 показан вид сбоку другого варианта осуществления движительного устройства согласно изобретению.
На фиг. 6 показан вид сбоку третьего варианта осуществления движительного устройства согласно изобретению;.
Подробное описание вариантов осуществления настоящего изобретения
На фиг. 1 показано движительное устройство предшествующего уровня техники. Устройство содержит приводную систему 10a, 20a с двумя гребными винтами, расположенными бок о бок у кормы корабля. Каждая приводная система содержит гребной винт 15a, 25a, приводимый валом 14a, 24a, и руль 16a, 26a, расположенный за гребным винтом 15a, 25a в направлении S приведения в движение корабля. Гребные винты 15a, 25a расположены на противоположных сторонах средней линии CL корпуса 100 корабля. Первый гребной винт 15a приводится первым валом 14a, и второй гребной винт 25 приводится вторым валом 24a. Каждый вал 14a, 24a приводится своим собственным основным двигателем (не показан на чертежах). Первый руль 16a расположен за первым гребным винтом 15a, и второй руль 26a расположен за вторым гребным винтом 25a. Валы 14a, 24a гребного винта параллельны по отношению друг к другу и также параллельны по отношению к средней линии CL корпуса 100 корабля. На чертеже также показан грузовой бак 200 для сжиженного природного газа LNG. На чертеже показано, что положение гребных винтов 15a, 25a по отношению к линиям F обтекания воды, текущей к гребным винтам 15a, 25a, не является оптимальным.
На фиг. 2 показано движительное устройство согласно изобретению. Устройство содержит два движительных агрегата 10, 20, расположенных бок о бок у противоположных сторон средней линии CL корпуса 100 корабля. Каждый движительный агрегат 10, 20 содержит камеру 12, 22, присоединенную поддерживающей структурой к корпусу 100 корабля. Гребной винт 15, 25, расположенный у переднего конца камеры 12, 22, приводится электрическим двигателем 13, 23, расположенным в камере 12, 22. Руль 16, 26 расположен у заднего конца камеры 12, 22. Линии SL вала движительных агрегатов 10, 20 расположены в положении обратного схождения по отношению к средней линии CL корпуса 100 корабля. Линии SL вала образуют угол β горизонтального наклона со средней линией CL корпуса 100 корабля так, чтобы линии SL вала пересекали друг друга у точки на средней линии CL корпуса корабля, причем упомянутая точка пересечения расположена за кораблем. Передний конец камер 12, 22 наклонен наружу (положение обратного схождения) по отношению к средней линии CL корпуса 100 корабля и задний конец камер 12, 22 наклонен вовнутрь по отношению к средней линии CL корпуса 100 корабля. На чертеже также показан грузовой бак 200 для сжиженного природного газа LNG.
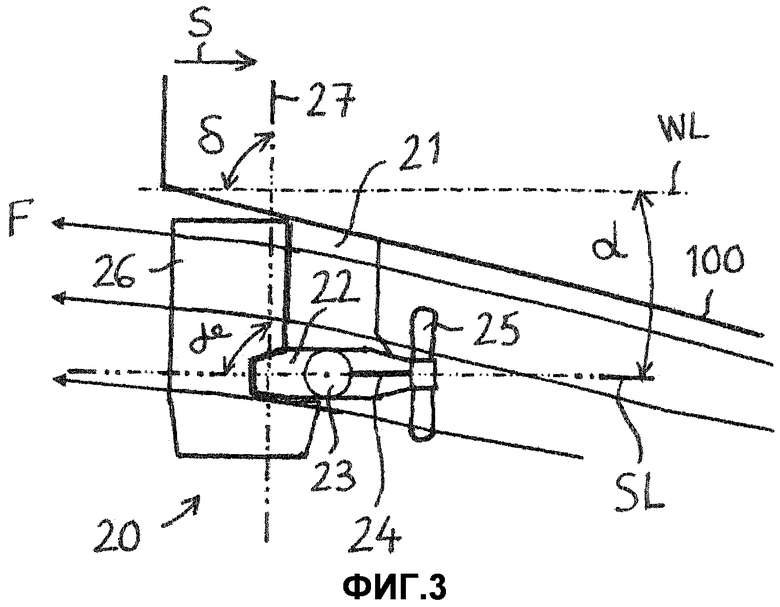
На фиг. 3 показан вид сбоку одного варианта осуществления движительного устройства согласно изобретению. На этих чертежах показано устройство движительного агрегата 20 по правому борту, показанного на фиг. 2. Движительный агрегат 10 по левому борту идентичен движительному агрегату по правому борту за исключением того, что наклон противоположен, чтобы два движительных агрегата 10, 20 образовывали зеркальные отображения друг друга. На чертежах также показано направление S приведения в движение корабля. На фиг. 3 также показаны линии F обтекания воды, текущей к движительному агрегату 20.
Движительный агрегат 20 содержит полую поддерживающую структуру 21, присоединяющую движительный агрегат 20 к корпусу 100 корабля, камеру 22, имеющую передний конец и задний конец по отношению к направлению S приведения корабля, причем упомянутая камера 22 присоединена к поддерживающей структуре 21, электрический двигатель 23 внутри камеры 22, вал 24, имеющий первый конец и второй конец, причем упомянутый первый конец вала 24 присоединен к ротору электрического двигателя 23, и упомянутый второй конец вала 24 выступает из переднего конца камеры 22 и присоединен к гребному винту 25. Электрический двигатель 23 может быть асинхронным двигателем или синхронным двигателем. Движительный агрегат 20 прикреплен к корпусу 100 судна с помощью поддерживающей структуры 22. Это значит, что гребной винт 25 всегда будет оставаться в неподвижном положении по отношению к корпусу 100 судна.
Вал 14 образует линию SL вала движительного агрегата 20. Линия SL вала и ватерлиния WL параллельны, что означает, что угол α вертикального наклона между ними составляет 0°. Угол между осью 27 руля 26 и линией SL вала, то есть угол γ, составляет 90°. Угол между осью 27 руля 26 и ватерлинией WL, то есть угол δ, также составляет 90°.
Руление корабля выполняется посредством отдельного руля 26, который присоединен к корпусу 100 корабля и к движительному агрегату 20 посредством оси 27. Таким образом, руль 26 прикреплен с возможностью поворота к корпусу 100 и к движительному агрегату 20. Руль 26 выполнен так, чтобы он образовывал плавное продолжение поддерживающей структуры 21 и камеры 22. Нижняя часть руля 26 простирается на некоторое расстояние под камеру 22. Рулевое зубчатое колесо, которое не показано на чертежах, поворачивает ось 27 и, таким образом, также руль 26 на основании команд с ходового мостика.
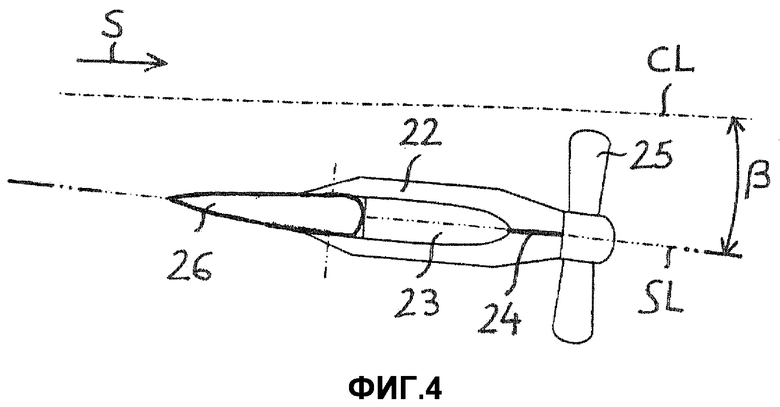
На фиг. 4 показано, что линия SL вала движительного агрегата 20 дополнительно расположена под углом β горизонтального наклона по отношению к средней линии CL корпуса 100 корабля. Это значит, что передняя сторона камеры 22, обращенная к гребному винту 25, наклонена наружу от средней линии CL корпуса 100 корабля, и задняя сторона камеры 22, обращенная к рулю 26, наклонена вовнутрь к средней линии CL корпуса 100 корабля. Движительный агрегат 20, таким образом, находится в положении обратного схождения по отношению к средней линии CL корпуса 100 корабля. Движительный агрегат 10 по левому борту образует зеркальное отображение движительного агрегата 20 по правому борту. Таким образом, движительный агрегат 10 по левому борту также расположен в положении обратного схождения по отношению к средней линии CL корпуса 100 корабля. Угол β обратного схождения лежит в диапазоне 0,5°-6°.
Эти устройства 10, 20 движительного агрегата с обратным схождением улучшат угол потока воды, входящей к гребным винтам 15, 25. Это устройство с обратным схождением улучшит эффективность, уменьшит вибрации и возбуждение корпуса 100 корабля.
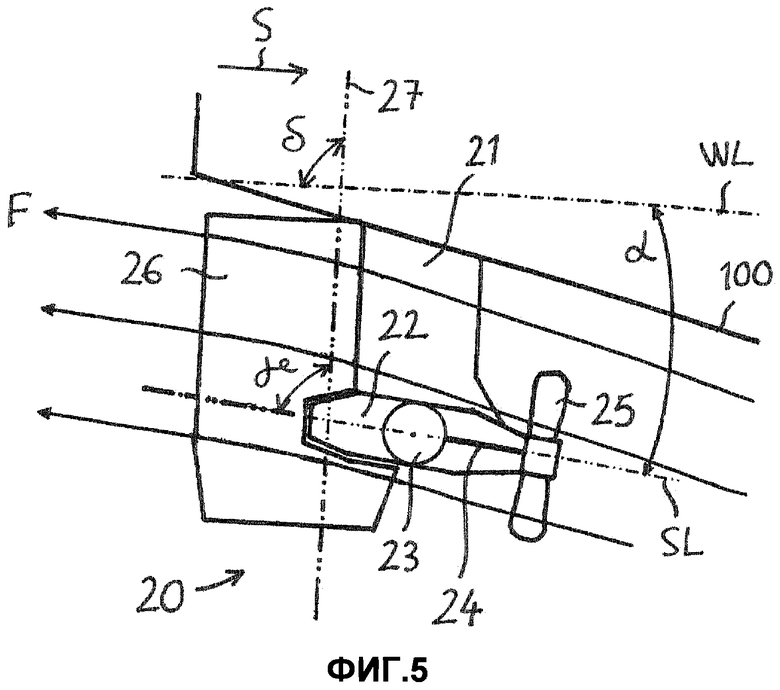
На фиг. 5 показан вид сбоку другого варианта осуществления движительного устройства согласно изобретению. Движительный агрегат 20 соответствует как таковой движительному агрегату, показанному на фиг. 3. Разница по сравнению с устройством, показанным на фиг. 3, заключается в том, что линия SL вала движительного агрегата 20 образует угол α вертикального наклона по отношению к ватерлинии WL. Это значит, что передний конец камеры 22 расположен ниже, чем задний конец камеры 22 по отношению к ватерлинии WL. Угол потока F воды, входящей к гребному винту 25, будет улучшен, если движительный агрегат 20 наклонен в вертикальном направлении. Это значит, что улучшится гидродинамическая эффективность гребного винта 25. Угол между осью 27 руля 26 и ватерлинией WL, то есть угол δ, все еще составляет 90°, как на фиг. 3. Угол между осью 27 руля 26 и линией SL вала, то есть угол γ, тем не менее, меньше, чем 90° в этом варианте осуществления из-за вертикального наклона движительного агрегата 20. На чертеже также показано направление S приведения в движение корабля.
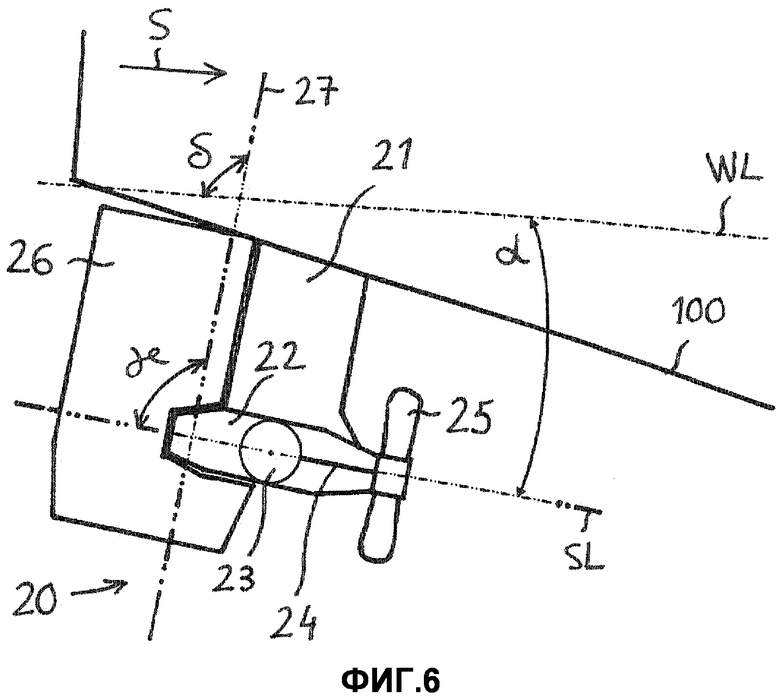
На фиг. 6 показан вид сбоку третьего варианта осуществления движительного устройства согласно изобретению. Это устройство как таковое соответствует устройству с фиг. 5, то есть движительный агрегат 20 наклонен под углом α по отношению к ватерлинии WL. Разница заключается в устройстве руля 26. В этом варианте осуществления угол между осью 27 руля 26 и линией SL вала, то есть угол γ, составляет 90°, что соответствует ситуации на фиг. 3. Это значит, что ось 27 руля 26 была наклонена по отношению к ватерлинии WL, то есть угол δ стал больше, чем 90°. Устройство, в котором ось 27 руля 26 образует прямой угол с линией SL вала, является преимущественным в отношении потока, образуемого гребным винтом 25. На чертеже также показано направление S приведения в движение корабля.
По меньшей мере один генератор (не показан на чертежах) предусмотрен внутри корпуса 100 корабля, обеспечивая подачу электрической энергии к электрическим двигателям 13, 23 в движительных агрегатах 10, 20 через электрическую сеть (не показана на чертежах).
Угол β горизонтального наклона, то есть угол обратного схождения, и угол α вертикального наклона должны быть определены отдельно для каждого корабля или серии кораблей. Оптимизация угла β горизонтального наклона и угла α вертикального наклона выполняется на основании испытания модели для каждого корабля или серии кораблей. Оптимизация выполняется отдельно для угла β горизонтального наклона и угла α вертикального наклона. Целью оптимизации является снижение потребления топлива, то есть увеличение эффективности. Наилучшая эффективность обычно достигается, когда поток воды, входящий в гребной винт, является прямым.
Отдельный руль 26 на чертежах поддерживается с возможностью поворота у корпуса 100 и у камеры 22 движительного агрегата 20. Руль 26 может поддерживаться с возможностью поворота у корпуса 100 и/или у движительного агрегата 20. Таким образом, руль 26 может поддерживаться с возможностью поворота только у полой поддерживающей структуры 21, или у корпуса 100 и полой поддерживающей структуры 21, или у корпуса 100 и камеры 22, или у камеры 21 и полой поддерживающей структуры 21.
Примеры вариантов осуществления настоящего изобретения, представленные выше, не направлены на ограничение объема изобретения только этими вариантами осуществления. В объеме формулы изобретения может быть выполнено множество модификаций изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПУЛЬСИВНАЯ УСТАНОВКА НА СУДНЕ | 2012 |
|
RU2544250C1 |
| ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2629812C1 |
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ФРЕГАТА | 2006 |
|
RU2311313C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2022 |
|
RU2785390C1 |
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 1972 |
|
SU426904A1 |
| ТРАНСПОРТНОЕ СУДНО | 2007 |
|
RU2395426C2 |
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ЭСМИНЦА (ВАРИАНТЫ) | 2006 |
|
RU2300477C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ДЛЯ МОРСКОГО СУДНА, СОДЕРЖАЩАЯ ДВИЖИТЕЛЬНЫЙ БЛОК, ПОДШИПНИК РУЛЯ И СОЕДИНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ | 2017 |
|
RU2754469C2 |

Изобретение относится к судостроению, а именно к кораблям с движительными устройствами. Корабль с движительным устройством содержит корпус, который имеет среднюю линию. Движительное устройство содержит неподвижный первый движительный агрегат на левой стороне от средней линии (CL) у кормы корпуса, неподвижный второй движительный агрегат на правой стороне от средней линии (CL) у кормы корпуса. Первый и второй движительные агрегаты содержат полую поддерживающую структуру, камеру, электрический двигатель, вал и поддерживающиеся с возможностью поворота отдельные рули у задних концов камер. Каждый отдельный руль прикреплен с возможностью поворота к корпусу и движительному агрегату. Каждый движительный агрегат установлен так, чтобы линия (SL) вала образовывала угол (β) горизонтального наклона в диапазоне 0,5°-6° к средней линии (CL) корпуса, чтобы движительные агрегаты были расположены в положении обратного схождения по отношению к средней линии (CL) корпуса. Достигается улучшение движительных устройств. 4 з.п. ф-лы, 6 ил.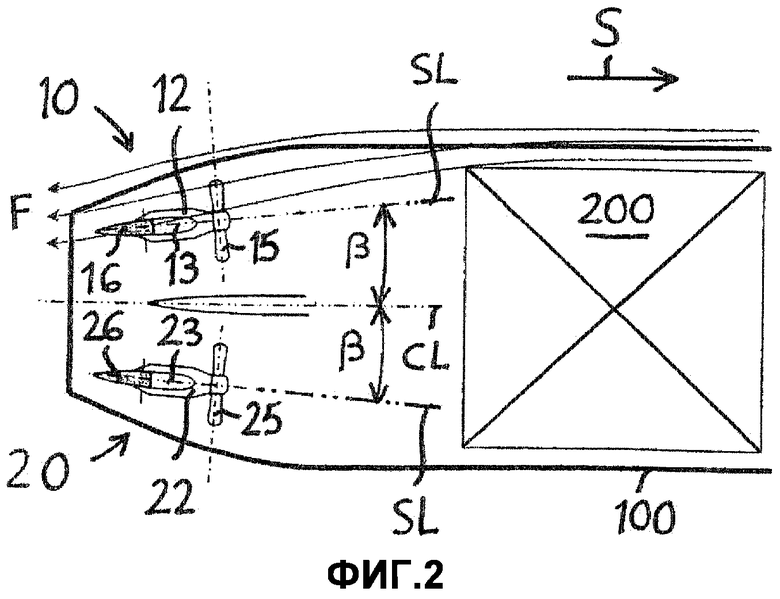
1. Корабль с движительным устройством, причем корабль содержит корпус (100), имеющий среднюю линию (CL), и движительное устройство содержит:
- неподвижный первый движительный агрегат (10) на левой стороне от средней линии (CL) у кормы корпуса (100);
- неподвижный второй движительный агрегат (20) на правой стороне от средней линии (CL) у кормы корпуса (100);
- причем как первый, так и второй движительные агрегаты (10, 20) содержат:
- полую поддерживающую структуру (21), прикрепленную к корпусу (100),
- камеру (12, 22), имеющую передний конец и задний конец, причем камера (22) прикреплена к поддерживающей структуре (21),
- электрический двигатель (13, 23) внутри камеры (12, 22),
- вал (24), имеющий первый конец и второй конец, причем первый конец вала (24) присоединен к электрическому двигателю (13, 23), и второй конец вала (24) выступает из переднего конца камеры (12, 22) и присоединен к гребному винту (15, 25), причем вал (24) образует линию (SL) вала (SL), и
- поддерживающийся с возможностью поворота отдельный руль (16, 26) у заднего конца камеры (22),
отличающийся тем, что:
- каждый отдельный руль (16, 26) прикреплен с возможностью поворота к корпусу (100) и движительному агрегату (10, 20), и
- каждый движительный агрегат (10, 20) установлен так, чтобы линия (SL) вала образовывала угол (β) горизонтального наклона в диапазоне 0,5°-6° к средней линии (CL) корпуса (100), чтобы движительные агрегаты (10, 20) были расположены в положении обратного схождения по отношению к средней линии (CL) корпуса (100), то есть передние концы камер (12, 22) были наклонены от средней линии (CL) корабля, и задние концы камер (22) были наклонены к средней линии (CL) корпуса (100) корабля.
2. Корабль по п.1, отличающийся тем, что каждый движительный агрегат (10, 20) установлен так, чтобы линия (SL) вала образовывала угол (α) вертикального наклона в диапазоне 1°-8° по отношению к ватерлинии (WL), чтобы передний конец камеры (12, 22) был расположен ниже, чем задний конец камеры (12, 22) по отношению к ватерлинии (WL).
3. Корабль по п.1 или 2, отличающийся тем, что корабль представляет собой крейсер, танкер, перевозящий нефть или сжиженный природный газ, корабль для перевозки автотранспорта, контейнерный корабль или паром.
4. Корабль по п.1 или 2, отличающийся тем, что мощность каждого движительного агрегата (10, 20) составляет, по меньшей мере, 1 МВт.
5. Корабль по п.3, отличающийся тем, что мощность каждого движительного агрегата (10, 20) составляет, по меньшей мере, 1 МВт.
| WO 2009126096 A1, 15.10.2009 | |||
| GB 221483 A, 05.02.1925 | |||
| US 5632658 A, 27.05.1997 | |||
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ФРЕГАТА | 2006 |
|
RU2311313C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ СУДНА С ДВИЖИТЕЛЬНО-РУЛЕВЫМ КОМПЛЕКСОМ | 2001 |
|
RU2203824C2 |

