Изобретение относится к космической технике и может быть использовано для выведения наноспутников и микроспутников на заданные траектории и с заданными скоростями.
Малые спутники, массами от одного до нескольких десятков килограмм, получивших названия «наноспутники» и «микроспутники», прочно вошли в различные сферы космических исследований. С их помощью широкий круг исследователей получил возможность проводить анализ отдельный областей атмосферы, исследовать определенные участки земной поверхности, анализировать различные виды космического излучения, а также излучение Земли в разных участках ЭМ спектра и т.д. Как правило, такие спутники доставляются на орбиты в качестве попутного груза.
Известна система отделения полезного груза от борта космического аппарата, содержащая разъединяемое переходное устройство, установленное между конструкциями космического аппарата и полезного груза и включающее в себя механические замки с удерживающими и фиксирующими звеньями, устройство фиксации механических замков, при этом система содержит толкатели отделения полезного груза, и отличающаяся тем, что устройство фиксации механических замков выполнено в виде равноплечной качалки без ограничения количества плеч, соответствующих количеству механических замков, установленной на оси вращения, закрепленной в корпусе переходного устройства, причем равноплечая качалка через сквозные окна переходного устройства шарнирно взаимодействует посредством стержневых тяг с фиксирующими звеньями механических замков, подпружиненные стержни которых имеют выемку под удерживающий поворотный двуплечий рычаг, другим концом, взаимодействующим с фиксирующим звеном замка, при этом одно из плеч равноплечей качалки шарнирно взаимодействует через стержневую тягу с пружинным толкателем, другое - с пирочекой, которые жестко закреплены снаружи корпуса переходного устройства, а на полезном грузе выполнены ограничители хода, взаимодействующие с подпружиненными стержнями механических замков (RU 2471684, МПК B64G 1/64, опубл. 10.01.2013).
К недостаткам такой системы можно отнести следующее:
- наличие вибрации запускаемого аппарата на стадии вывода ракеты-носителя на заданную орбиту;
- относительно большая масса адаптера по отношению к сателлиту, до 150% на каждое место установки спутника;
- повторное использование такой системы не предусмотрено.
Также известен адаптер для группового запуска наноспутников, содержащий платформу, на которую установлен наноспутник. Адаптер снабжен индуктором, выполненным в виде спиральной катушки, к активной зоне которого примыкает одной стороной переходная пластина, а на другой стороне расположен наноспутник, индуктор подключен через управляемый разрядник к емкостному накопителю энергии, а накопитель соединен с выходом высоковольтного зарядного блока, входы которого соединены с бортовой сетью питания (RU 2472679, МПК B64G 1/22, B64G 1/64, опубл. 20.01.2013) - прототип.
Основным недостатком таких адаптеров является малая величина КПД, обусловленная тем, что большая часть энергии магнитного поля, созданного индуктором, бесполезно рассеивается в окружающем пространстве и, кроме того, вследствие наличия токов Фуко, переходит в тепловую энергию Джоуля-Ленца, что, как правило, приводит к деформации посадочного места запускаемого аппарата и создает помехи для бортовых электронных устройств спутников.
Задача, на решение которой направлено заявленное изобретение: устранение указанных недостатков и обеспечение управляемого запуска нанос путников и микроспутников с заданной скоростью и с заданными направлениями азимутального и зенитных углов соответственно.
Поставленная задача решается за счет того, что устройство управляемого запуска наноспутников и микроспутников, содержащее платформу, на которую установлен наноспутник или микроспутник, согласно изобретению, снабжено системой ориентации и магнитоиндукционным эжектором, система ориентации состоит из внешнего и внутреннего корпусов, внешний корпус расположен на основании и выполнен с возможностью поворота при помощи электродвигателя относительно вертикальной оси, внутренний корпус закреплен на внешнем корпусе с помощью горизонтальной оси и двух подшипников и выполнен с возможностью поворота относительно горизонтальной оси при помощи электродвигателя, магнитоиндукционный эжектор состоит из двух катушек индуктивности соленоидального типа, которые помещены в сердечники броневого типа и попарно запрессованы в стаканы, являющиеся экранами от импульсов магнитного поля, при этом к одному стакану, выполненному с возможностью вертикального перемещения по скользящим направляющим, расположенным на внутреннем корпусе, прикреплен шток, жестко связанный с платформой, катушки индуктивности связаны с конденсаторами.
Кроме того, устройство содержит электронную систему управления запуска, состоящую из микроконтроллера, который соединен с коммуникатором, блоком управления зарядом, драйверами электродвигателей и ключевыми устройствами, при этом драйверы электродвигателей соединены с соответствующими электродвигателями, конденсаторы через ключевые устройства соединены с микроконтроллером, катушки индуктивности соленоидального типа соединены с конденсаторами с помощью ключевых устройств, при этом одно из ключевых устройств соединено с другим ключевым устройством через переключатель выводов обмотки.
Сердечники броневого типа выполнены из ферромагнитного материала.
Катушки индуктивности соленоидального типа плотно прижаты друг к другу при помощи поджимной пружины.
Изобретение поясняется чертежами, где:
на фиг. 1 показан общий вид,
на фиг. 2 - структурная схема электронной системы управления устройством управляемого запуска наноспутников и микроспутников.
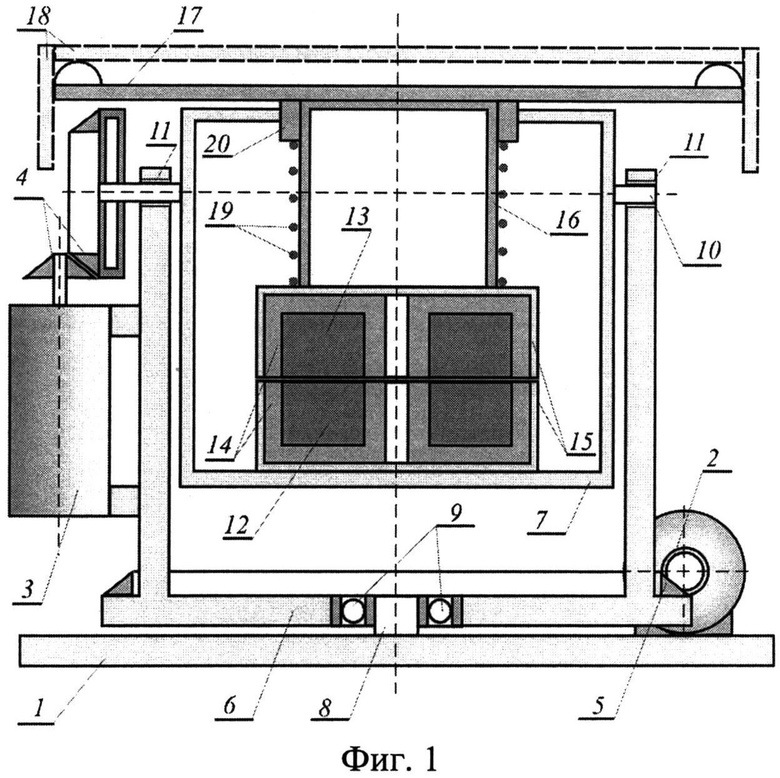
Устройство управляемого запуска наноспутников и микроспутников состоит из двух основных частей: магнитоиндукционного эжектора и системы ориентации. Устройство управляемого запуска наноспутников и микроспутников смонтировано на плите - основании 1, жестко связанной со средством доставки. Система ориентации дает возможность выбрать заданные углы зенита и азимута соответственно. Система ориентации состоит из электродвигателей привода 2 и 3, конических передач 4 и 5 и двух корпусов: внешнего 6 и внутреннего 7. Внешний корпус 6 через вертикальную ось 8 и подшипник 9 соединен с плитой-основанием 1, внутренний корпус 7 через горизонтальную ось 10, насаженную на два подшипника 11, прикреплен к внешнему корпусу 6. Магнитоиндукционный эжектор состоит из двух катушек индуктивности соленоидального типа: неподвижной 12 и движущейся 13, которые помещены в сердечники броневого типа 14. Катушки индуктивности 12 и 13, жестко размещенные в сердечниках броневого типа 14, попарно запрессованы в стаканы 15, выполняющие дополнительно роль экранов от импульсов магнитного поля. К верхнему стакану прикреплен полый шток 16, который жестко связан с платформой запуска 17 наноспутника 18. Вокруг штока 16 расположена поджимная пружина 19. В верхней части внутреннего корпуса 7 расположена скользящая направляющая 20.
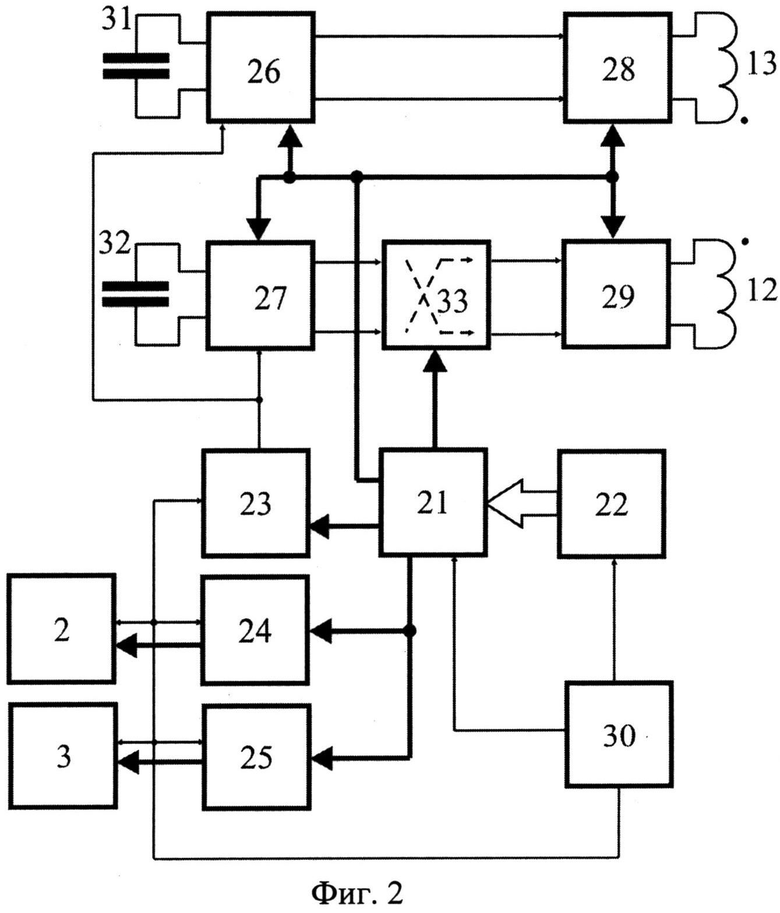
На фиг. 2 приведена структурная схема электронной системы управления устройством управляемого запуска наноспутников и микроспутников. Центральным узлом здесь является микроконтроллер 21, который соединен с коммуникатором 22, блоком управления зарядом 23, драйверами электродвигателей 24 и 25, ключевыми устройствами 26, 27, 28 и 29. Электронная система управления устройством запуска наноспутников и микроспутников имеет в своем составе уже существующую автономную систему электропитания 30, принцип действия которой приведен в патенте RU 2337452 С1.
Драйверы электродвигателей 24 и 25 соединены с электродвигателями 2 и 3 соответственно. Конденсаторы 31 и 32, через ключевые устройства 26 и 27 соединены с микроконтроллером 21. Катушки индуктивности соленоидального типа 12 и 13 соединены с конденсаторами 31 и 32 с помощью ключевых устройств 28 и 29, при этом ключевое устройство 29 соединено с ключевым устройством 27 через переключатель выводов обмотки 33.
Устройство управляемого запуска наноспутников и микроспутников работает следующим образом. Микроспутник или наноспутник 18 роботом манипулятором устанавливается на платформу запуска 17. Для установки заданного угла азимута на драйвер электродвигателя 24 поступает соответствующая кодовая посылка от микроконтроллера 21. После чего драйвер электродвигателя 24 выдает управляющие сигналы на электродвигатель привода 2, вращающее воздействие от которого через коническую передачу 5 передается на внешний корпус 6. Таким образом, происходит поворот в азимутальной плоскости корпуса 6 вокруг вертикальной оси 8, насаженной на подшипник 9. Для установки заданного зенитного угла на драйвер электродвигателя 25 поступает соответствующая кодовая посылка от микроконтроллера 21. После чего драйвер электродвигателя 25 выдает управляющие сигналы на электродвигатель привода 3, вращающее воздействие от которого через коническую передачу 4 передается на внутренний корпус 7. Таким образом, происходит поворот в зенитной плоскости внутреннего корпуса 7 вокруг горизонтальной оси 10, насаженной на два подшипника 11. Для создания импульса электромагнитного поля в катушках индуктивности используются конденсаторы 31 и 32, которые предварительно заряжаются от бортовой сети средства доставки или от аккумулятора входящего в состав данного устройства. Контроль заряда конденсаторов 31 и 32 осуществляет блок управления зарядом 23. После того как в конденсаторах сформировался нужный заряд, производится их разряд через катушки индуктивности соленоидального типа 12 и 13. При этом в течение (10…40) мкс катушки индуктивности соленоидального типа 12 и 13 включены так, что «направление обмоток» у них совпадает. Затем катушки индуктивности соленоидального типа 12 и 13 включаются «встречно», при этом подвижная катушка индуктивности соленоидального типа 13 успевает пройти расстояние порядка 10-2 м. Это реализовано с помощью переключателя выводов обмотки 33, который соединен с «неподвижной» катушкой индуктивности соленоидального типа 12, и ключевых устройств заряда и разряда 26, 27, 28 и 29.
Дальнейшее движение определяется магнитным взаимодействием почти «свободных контуров», определяемых величиной индуктивности катушек, их активными сопротивлениями, а также суммарными токами в них. Энергия такого взаимодействия относительно невелика и расходуется фактически на преодоление сил трения в системе и сил упругости демпфера. Основной импульс, требуемый для запуска с заданной начальной скоростью микроспутника или наноспутника, таким образом, формируется практически в начальный интервал времени.
В рабочем макете данной системы были использованы электролитические конденсаторы емкостью 10000 мкф (100 В). Катушки индуктивности соленоидального типа содержат по 48 витков медного провода, диаметром 1 мм. Энергия, запасаемая в каждом конденсаторе около 50 Дж, энергия, которую можно сосредоточить в катушках индуктивности соленоидального типа примерно 3 Дж. Время заряда конденсаторов (1÷20) с определяется требуемой величиной заряда для сообщения запускаемому аппарату заданной скорости. Габариты устройства управляемого запуска наноспутников и микроспутников примерно 1 дм3, масса порядка 1,5 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |
| Механизм для запуска наноспутников | 2023 |
|
RU2829378C1 |
| СПОСОБ ЗАПУСКА НАНОСПУТНИКОВ В КАЧЕСТВЕ ПОПУТНОЙ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472679C1 |
| Магнитная система ориентации нано- и микроспутников | 2023 |
|
RU2823985C1 |
| АВТОНОМНОЕ ПЕРЕНОСНОЕ УСТРОЙСТВО ИНДУКТИВНОЙ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2018 |
|
RU2695103C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ С ПЕРЕМЕННОЙ СКОРОСТЬЮ ВРАЩЕНИЯ | 2003 |
|
RU2275734C2 |
| Автономная мобильная фотоэлектростанция | 2023 |
|
RU2805773C1 |
| Магнитно-резонансный томограф с метаповерхностью (варианты) | 2021 |
|
RU2776338C1 |
Изобретение относится к космической технике и может быть использовано для запуска спутников. Устройство управляемого запуска наноспутников и микроспутников содержит платформу с наноспутником или микроспутником, шток, конденсаторы, систему ориентации с внешним и внутренним корпусами, электродвигателями и подшипниками, магнитоиндукционный эжектор с двумя плотно прижатыми поджимной пружиной катушками индуктивности соленоидального типа, размещенными в сердечнике броневого типа из ферромагнитного материала и попарно запрессоваными в стаканы, электронную систему управления запуска с микроконтроллером, коммуникатором, блоком управления зарядом, драйверами электродвигателей, ключевыми устройствами и переключателем выводов обмотки. Изобретение позволяет повысить КПД устройства запуска. 3 з.п. ф-лы, 2 ил.
1. Устройство управляемого запуска наноспутников и микроспутников, содержащее платформу, на которую установлен наноспутник или микроспутник, отличающееся тем, что оно снабжено системой ориентации и магнитоиндукционным эжектором, система ориентации состоит из внешнего и внутреннего корпусов, внешний корпус расположен на основании и выполнен с возможностью поворота при помощи электродвигателя относительно вертикальной оси, внутренний корпус закреплен на внешнем корпусе с помощью горизонтальной оси и двух подшипников и выполнен с возможностью поворота относительно горизонтальной оси при помощи электродвигателя, магнитоиндукционный эжектор состоит из двух катушек индуктивности соленоидального типа, которые помещены в сердечники броневого типа и попарно запрессованы в стаканы, являющиеся экранами от импульсов магнитного поля, при этом к одному стакану, выполненному с возможностью вертикального перемещения по скользящим направляющим, расположенным на внутреннем корпусе, прикреплен шток, жестко связанный с платформой, катушки индуктивности связаны с конденсаторами.
2. Устройство по п. 1, отличающееся тем, что оно содержит электронную систему управления запуска, состоящую из микроконтроллера, который соединен с коммуникатором, блоком управления зарядом, драйверами электродвигателей и ключевыми устройствами, при этом драйверы электродвигателей соединены с соответствующими электродвигателями, конденсаторы через ключевые устройства соединены с микроконтроллером, катушки индуктивности соленоидального типа соединены с конденсаторами с помощью ключевых устройств, при этом одно из ключевых устройств соединено с другим ключевым устройством через переключатель выводов обмотки.
3. Устройство по п. 1, отличающееся тем, что сердечники броневого типа выполнены из ферромагнитного материала.
4. Устройство по п. 1, отличающееся тем, что катушки индуктивности соленоидального типа плотно прижаты друг к другу при помощи поджимной пружины.
| СПОСОБ ЗАПУСКА НАНОСПУТНИКОВ В КАЧЕСТВЕ ПОПУТНОЙ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472679C1 |
| АДАПТЕР ДЛЯ ГРУППОВОГО ЗАПУСКА МИКРОСПУТНИКОВ | 2004 |
|
RU2260551C1 |
| WO 2011096899 A1, 11.08.2011 | |||
| US 6068010 A1, 30.05.2000 | |||

