Изобретение относится к космической технике, в частности к системам отделения от космических летательных аппаратов (КЛА), и может быть использовано для одновременного отделения как одного, так и группы наноспутников (НС).
На сегодняшний день для отделения НС используются устройства, работающие на основе пружинного толкателя (патент 2254265, МПК В64С 1/00, опубл. 20.06.2004 г.), либо на энергии сжатого газа, либо на основе пирозаряда.
Известно устройство, содержащее адаптируемую к ракете-носителю стойку и идентичные органы стыковки (патент 2156212, МПК B64G 1/22, опубл. 20.09.2000 г.). На каждом органе расположена система крепления и отделения наноспутника, а также электроразъемы, которые служат для электрической связи с ракетой-носителем спутников и органов стыковки. Снаружи стойки монтируются идентичные посадочные места. Органы стыковки могут быть установлены на любое число этих мест. Изобретение направлено на достижение унификации средств выведения спутников.
Известен адаптер для группового запуска наноспутников (патент 2260551, МПК B64G 1/64, опубл. 20.09.2005). Для обеспечения жесткости системы крепления и уменьшения массы спутники размещаются по оптимальной схеме на платформе.
В перечисленных патентах наноспутники отделяются от средства выведения с помощью индивидуальных автономных устройств, которые размещаются на местах установки при проведении наземных сборочно-монтажных работ. Повторное использование их не предусмотрено.
Известен также способ отделения НС от средства доставки с помощью магнитоиндукционной системы, содержащей индуктор, через соленоидальную катушку которого разряжается конденсатор (патент №2472679, МПК B64G 1/22, опубл. 20.01.2013). В данном способе индуктор и конденсаторы жестко закреплены на платформе средства доставки, запускаемый аппарат, основание которого должно быть выполнено из ферромагнитного материала, устанавливается на индуктор. Запуск производится следующим образом: конденсатор с помощью тиристорного ключа разряжается через индуктор, в материале основании запускаемого аппарата наводятся токи Фуко, таким образом, за счет взаимодействия магнитных полей индуктора и индуцированных полей в зоне основания наноспутника происходит отделение аппарата от средства доставки.
Недостатками данного способа устройства являются крайне малый коэффициент полезного действия, деформация или разрушение основания наноспутника, отсутствие возможности произвести запуск в заданном направлении, произвольное (хаотичное) движение наноспутника относительно его центра масс после отделения.
Наиболее близким к заявляемому устройству является устройство запуска с помощью магнитоиндукционного эжектора (патент №2551408 C1 RU, МПК B64G 1/64 опубл. 20.05.2015). На этом устройстве расположена система крепления и отделения наноспутника, а также электроразъемы, которые служат для электрической связи с ракетой-носителем спутников и органов стыковки. После определения направления ориентации средства доставки КЛА относительно данной планеты производится расчет параметров запуска группировки микроспутников. Эта процедура выполняется бортовым вычислительным комплексом средства доставки КЛА. Рассчитанные исходные данные передаются на микропроцессорную систему управления запуском, осуществляемую с помощью магнитоиндукционного эжектора (МИЭ). Микроспутник роботом манипулятором устанавливается на платформу запуска МИЭ. После установки и фиксации НС на планшайбе МИЭ с помощью электромеханических систем поворота задаются азимутальный и зенитный углы относительно ориентации средства доставки или относительно системы координат связанной с планетой. Для создания импульса электромагнитного поля в индукторах служат конденсаторы C1, C2, которые предварительно заряжаются от бортовой сети КЛА, а именно системы аккумулятор - солнечные панели. В исходный момент времени индукторы плотно прижаты друг к другу. В этот момент тиристоры Vs1, Vs2 открываются импульсами сформированными микропроцессором и через полевые транзисторы T1, T2 начинается разряд конденсаторов через индуктивности L1, L2, помещенные в броневые сердечники из ферромагнитного материала. Так как в исходный момент времени индукторы плотно прижаты друг к другу, а ток разряда достигает нескольких сотен ампер, то в замкнутом объеме индукторов можно запасти энергию в несколько джоулей, что обеспечивает коэффициент полезного действия в несколько десятков процентов.
К недостаткам этого магнитоиндукционного эжектора можно отнести:
- наличие вибрации наноспутника на стадии вывода ракеты-носителя на заданную орбиту, обусловленную собственными частотами системы прижимных и выпускных пружин контейнера и наноспутника;
- после отделения наноспутник может занимать произвольное положение в пространстве - вращательное, колебательное движение по траектории;
- относительно невысокая энергоемкость системы, позволяющая запускать наноспутники с небольшими начальными скоростями несмотря на высокий коэффициент полезного действия.
Задачей предлагаемого изобретения является улучшение энергомассовых характеристик, повышение энергии запуска, расширение функциональных возможностей устройства для запуска наноспутников с заданной скоростью и в заданном направлении в соответствии с выбранными зенитным и азимутальным углами, исключающее хаотичное движение по траектории.
Поставленная задача решается благодаря тому, что перед запуском каждого спутника на его основание устанавливается одноосный гироскоп, после чего платформа запуска с установленным аппаратом ориентируется в заданных зенитном и азимутальном направлениях с помощью соответствующих систем привода, управляемых микропроцессором, после чего производится раскрутка одноосного гироскопа до заданного значения момента импульса и затем с помощью импульсного магнитного поля, импульс силы которого оказывается приложенным к отделяемому аппарату, осуществляется его отделение от платформы магнитоиндукционной системы запуска.
Устройство на основе микропроцессорной магнитоиндукционной системы для осуществления данного способа содержит сильноточный соленоид, помещенный в рабочий зазор системы постоянных неодимовых магнитов и состоящий из набора кольцевых магнитов и соосно установленного неодимового цилиндрического магнита, заключенных в корпус, выполненный из магнитомягкого материала для экранирования электромагнитных помех, при этом соленоид подключен через электронный ключ к ждущему одновибратору, соединенному с микропроцессором, установленным на устройстве запуска, которое также соединено с формирователем токового импульса электронным ключом, состоящим из нескольких мощных полевых транзисторов, включенных параллельно друг другу, а также с блоком коррекции формы импульсов разряда от конденсаторной батареи.
Кроме того, устройство содержит электромагниты фиксации запускаемого аппарата, которые соединены с микропроцессором, расположенным в системе запуска.
Кроме того микропроцессор блока управления соединен через интерфейс с компьютером средства доставки и имеет свое постоянное запоминающее устройство, в котором хранится программное обеспечение процедур запуска, микропроцессор также соединен с преобразователем напряжения, который формирует напряжения для зарядки конденсаторной батареи и напряжение для питания сильноточной обмотки одноосного гироскопа, ждущим одновибратором и формирователями управляющих сигналов для шаговых двигателей ориентации.
Изобретение позволяет по сравнению с выбранным прототипом в несколько (десятков) раз увеличить кинетическую энергию отделяемого аппарата, наличие одноосного гироскопа, который раскручивается до заданного значения момента инерции на старте после выбора зенитного и азимутального углов, а после старта становится неотъемлемой частью НС, исключает хаотическое движение НС по траектории.
Техническая сущность и принцип действия заявляемого способа запуска микро- и наноспутников и устройства на основе микропроцессорной магнитоиндукционной системы для осуществления запуска поясняется следующими чертежами:
На фиг. 1 показана схема электромеханической магнитоиндукционной системы запуска микро- и наноспутников;
на фиг. 2 изображена блок схема электронного блока управления магнитоиндукционной системой запуска микро- и наноспутников.
Устройство электромеханической части магнитоиндукционной системы запуска микро- и наноспутников содержит: элемент корпуса средства доставки 1, фланец корпуса основания устройства 2, основание 3, шаговый двигатель 4, сектор ведомой шестерни механизма зенитной ориентации 5, подшипники 6, ограничители 7, корпус платформы 8, механизм привода азимутальной ориентации 9, корпус подшипников 10, фланец 11, корпус магнитного эжектора 12, магниты кольцевые 13, направляющую 14, посадочную планшайбу 15, электромагниты фиксации запускаемого аппарата 16, слаботочную обмотку одноосного гироскопа и магниты возбуждения тока 17, корпус гироскопа 18, демпферы 19, замки фиксации 20, ротор гироскопа 21, подшипник 22, конусные направляющие 23, основание запускаемого аппарата 24, балластное кольцо ротора гироскопа 25, сильноточную обмотку одноосного гироскопа и магниты возбуждения тока 26, ферромагнитные вставки, демпферы 27, направляющие 28, пружину 29, обмотку сильноточного соленоида 30, узел подшипника скольжения механизма ориентации в зенитном направлении 31, цилиндрический магнит 32, ось механизма зенитной ориентации 33, ось механизма азимутальной ориентации 34.
Электронный блок управления содержит следующие блоки и узлы (фиг. 2): блок аккумуляторов 35, преобразователь напряжения 36, конденсаторную батарею 37, ключ 38, выполненный на мощных полевых транзисторах, корректор импульсов запуска 39, соленоидальную катушку эжектора 40, ПЗУ 41, ждущий одновибратор 42, формирователь токовых импульсов запуска 43, микроконтроллер (микропроцессор) 44, формирователи сигналов управления шаговыми двигателями (ШД) 45, 46, драйверы шаговых двигателей 47, 48, интерфейс связи со средством доставки 49, шаговые двигатели 50, 51.
Электромеханическая часть микропроцессорной магнитоиндукционной системы запуска устанавливается на корпусе средства доставки с помощью фланца корпуса основания 2, в котором запрессовано основание 3, выполненное в виде пустотелого цилиндра. На основании закреплен корпус платформы 8, внутри которого расположены подшипники 6 с запрессованной в них осью механизма азимутальной ориентации 34. На эту ось 34 напрессованы: цилиндрический неодимовый магнит 32 и корпус магнитного эжектора 12 цилиндрической формы. Он выполнен из магнитомягкого материала для экранирования импульсных электромагнитных помех, возникающих при разряде конденсаторной батареи через сильноточный соленоид 30. Внутри корпуса 12 установлены кольцевые магниты, например, из неодима, их количество определяется энергией, необходимой для запуска отделяемого аппарата определенной массы. Таким образом, в области пространства между цилиндрическим и кольцевыми магнитами, которые сориентированы соосно, формируется почти однородное магнитное поле. Эта область пространства является рабочим зазором магнитоиндукционного эжектора. В рабочем зазоре, также соосно, размещается многослойный сильноточный соленоид 30, закрепленный на пустотелой направляющей 14, выполненной из немагнитного материала. Направляющая может перемещаться вдоль оси цилиндрического магнита, являющегося продолжением оси 34. Направляющая 14 и посадочная планшайба запуска 15 представляют собой одно целое. В посадочной планшайбе запрессована обмотка электромагнита фиксации 16 запускаемого аппарата, а для выполнения условия соосности отделяемого аппарата и системы запуска в посадочной планшайбе сделана конусная направляющая 23 и соответственно в основании одноосного гироскопа 18 - ее ответная часть. Для предотвращения резких ударов соленоида 30 о крышку корпуса 12 во время запуска между верхней крышкой корпуса 12 и соленоидом установлена демпфирующая пружина 29. На нижнюю часть корпуса 12 напрессована зазоровыбирающая ведомая шестерня, которая с ведущей шестерней и шаговым двигателем составляют механизм привода в азимутальном направлении 9. Через корпус платформы 8 проходит ось механизма зенитной ориентации 31, установленная в подшипник скольжения, на эту ось запрессован сектор ведомой шестерни механизма зенитной ориентации 5, который приводится во вращение ведущей шестерней, насаженной на вал шагового двигателя 4. Одноосный гироскоп состоит из корпуса 18, в котором размещены сильноточная обмотка 26 и слаботочная обмотка 17. В центре корпуса установлен подшипник качения 22, на внутреннее кольцо которого напрессован ротор гироскопа 21. Ротор гироскопа состоит из цилиндрического корпуса, на внешней поверхности которого закреплены постоянные магниты. Они в совокупности с сильноточной и слаботочной обмотками служат двигателями для его раскрутки. Внутри гироскопа установлено балластное кольцо 25, масса которого определяет его инерционные свойства. На нижнем основании гироскопа напрессованы кольца из ферромагнитного материала, которые в сочетании с соленоидальной обмоткой образуют электромагнит 16 для фиксации на планшайбе 15 запускаемого аппарата. Между гироскопом и посадочной планшайбой 15 установлены демпферы 27, которые закреплены на планшайбе, на ней же установлены направляющие 28, облегчающие манипулятору процесс установки отделяемого аппарата посадочную планшайбу. Механические замки фиксации 20 служат для жесткой стыковки НС с одноосным гироскопом. Между основанием НС 24 и одноосным гироскопом установлены демпферы 19, закрепляемые на корпусе гироскопа.
Электромеханическая часть микропроцессорной магнитоиндукционной системы запуска работает следующим образом. На посадочную планшайбу 15 устанавливаются одноосный гироскоп 18, который через фиксирующие электромагниты 16 связан с запускаемым аппаратом. Для точной фиксации относительно главной оси запускаемого аппарата служит конусная направляющая 23 на посадочной планшайбе 15 с соответствующей ответной частью в основании гироскопа 18. Фиксация отделяемого аппарата на посадочной планшайбе системы запуска осуществляется с помощью электромагнита фиксации 16, который состоит из соленоидальной обмотки, расположенной на планшайбе 15 и кольцевой вставки из ферромагнитного материала, запрессованной в основание одноосного гироскопа 18. Физически фиксация производится подачей постоянного напряжения на обмотку электромагнита 15 в течение интервала времени от момента установки НС на планшайбу до момента его отделения, этим процессом управляет микропроцессор. Далее с помощью шаговых электродвигателей и механизмов привода 4, 5, 9 по командам микропроцессора производится установка зенитного и азимутального углов относительно ориентации средства доставки, или относительно системы координат связанной с планетой, после этого осуществляется раскрутка гироскопа с помощью сильноточной обмотки 26, после достижения заданного момента импульса микропроцессор отключает обмотку 26. В течение интервала времени фиксации отделяемого аппарата на системе запуска, его ориентации в заданном направлении и раскрутки гироскопа, производится заряд конденсаторной батареи под управлением микропроцессора. Далее осуществляется разряд конденсаторов через обмотку сильноточного соленоида 30, в результате взаимодействия индуцированного импульсного магнитного поля в обмотке соленоида с постоянным магнитным полем, сформированным кольцевыми магнитами 13 и цилиндрическим магнитом 32, отделяемый аппарат получает механический импульс. В момент отделения отключается электромагнит фиксации 16 и НС с одноосным гироскопом отделяется от планшайбы 15. Для коррекции момента импульса вращательного движения микроконтроллер, установленный на НС, включает слаботочную обмотку одноосного гироскопа, компенсируя, таким образом, вращательное движение относительно главной оси отделенного аппарата.
Центральным узлом электронного блока является микроконтроллер (микропроцессор) 44 с внешним ПЗУ 41, в котором записаны программы управления. Микропроцессор 44 соединен с преобразователем напряжения 36, ждущим одновибратором 42, который связан с формирователем токовых импульсов 43, соединенным с управляющими затворами полевых транзисторов, образующих ключ 38, и с формирователями импульсов управления шаговыми двигателями 45, 46, а также с интерфейсом связи 49 с компьютером, установленным на средстве доставки. Формирователи сигналов управления шаговыми двигателями 45, 46 через драйверы 47, 48 соединены с шаговыми двигателями 50, 51. Преобразователь напряжения 36 соединен с конденсаторной батареей 37, которая через ключ 38, выполненный из параллельно включенных, мощных полевых транзисторов подключена к корректору фронтов импульсов запуска 39, который, в свою очередь, соединен с обмоткой сильноточного соленоида 40.
Электронный блок управления магнитоиндукционной системой запуска микро- и наноспутников работает следующим образом. После того как средство доставки заняло некоторое положение в пространстве, соответствующее возможности запуска наноспутников, с бортового компьютера поступает соответствующий сигнал и данные о пространственной ориентации через интерфейс 49 на микропроцессор 44. Микропроцессор, после того как робот манипулятор установит наноспутник и одноосный гироскоп на посадочную планшайбу системы запуска, выдает команды преобразователю напряжения 36 на начало зарядки конденсаторной батареи 37 от аккумулятора 35. Одновременно подключается обмотка электромагнита фиксации запускаемого аппарата. В это же время производится ориентация отделяемого аппарата с пристыкованным к нему гироскопом в заданных зенитном и азимутальном направлениях. Это осуществляется по соответствующим командам микропроцессора 44, который через формирователь сигналов управления в азимутальном направлении 45, драйвер шагового двигателя 47 заставляет ротор двигателя 50 повернуться на соответствующий угол, в результате чего с помощью механизма привода 9 запускаемый аппарат устанавливается под нужным азимутальным углом. Затем происходит разворот установочной планшайбы с закрепленными на ней одноосным гироскопом и отделяемым аппаратом в зенитном направлении. Это осуществляется по соответствующим командам микропроцессора через формирователь управляющих сигналов шагового двигателя в зенитном направлении 46, который через драйвер 48, разворачивает ось шагового двигателя 51 на необходимый угол. С помощью сектора ведомой шестерни 5 относительно оси механизма зенитной ориентации 33 система запуска устанавливается под заданным зенитным углом. Потом начинается раскрутка ротора гироскопа с помощью сильноточной обмотки в течение некоторого времени, задаваемого микропроцессором и определяемого необходимым моментом вращательного движения соответствующего стабильному положению главной оси НС на орбите после отделения. После того как заданное направление запуска выбрано и ротор одноосного гироскопа приобрел заданное число оборотов, микропроцессор 44 запускает ждущий одновибратор 42 и задает ему определенную длительность импульса, одновибратор в свою очередь включает формирователь токового импульса 43, который открывает параллельную сборку мощных полевых транзисторов ключа 38. Таким образом, осуществляется разряд конденсаторной батареи 37 через корректор импульсов 39, устраняющий высокочастотные помехи в разрядном импульсе, на соленоидальную катушку 40. Под действием импульса запуска сильноточная соленоидальная катушка в окружающем пространстве формирует магнитное поле, которое в результате взаимодействия с постоянным полем, сформированным неодимовыми кольцевым и цилиндрическим магнитами, сообщает отделяемому аппарату соответствующий механический импульс. Непосредственно перед отделением микропроцессор 44 выдает команду преобразователю напряжения 36, который отключает обмотку электромагнита фиксации запускаемого аппарата. Таким образом, данная система производит запуск отделяемого аппарата в заданном направлении с заданной скоростью, которая определяется величиной заряда снимаемого с конденсаторной батареи 37, длительностью импульса ждущего одновибратора 42.
Для запуска второго и последующих запусков наноспутников производятся последовательные циклы: заряд конденсаторной батареи, установка НС с одноосным гироскопом на планшайбу запуска, фиксация отделяемого аппарата с помощью электромагнита, ориентирование отделяемого аппарата в заданном направлении, разряд конденсаторной батареи через соленоид - запуск.
Энергия, запасаемая в конденсаторе и равная:  , расходуется на создание магнитного поля в индуктивности
, расходуется на создание магнитного поля в индуктивности  , на нагрев контура
, на нагрев контура  , (0÷t1) - выбираемый интервал времени разряда. Кроме того, при движении соленоидальной катушки в магнитном поле в ней возбуждаются индукционные токи, ЭДС которых
, (0÷t1) - выбираемый интервал времени разряда. Кроме того, при движении соленоидальной катушки в магнитном поле в ней возбуждаются индукционные токи, ЭДС которых  , уменьшающие основной ток разряда, что приводит к снижению КПД этой электромеханической системы. КПД магнитоиндукционной системы запуска, определяемый как отношение механической энергии, необходимой для запуска аппарата с заданной скоростью, к энергии, запасенной в конденсаторе, составляет порядка 6÷9%. Таким образом, исходя из условий запуска, например НС массой в 1 кг со скоростью 1 м/с в конденсаторе необходимо запасти не менее 50 Дж энергии, что можно обеспечить с помощью электролитического конденсатора 0.01 Ф × 100 В.
, уменьшающие основной ток разряда, что приводит к снижению КПД этой электромеханической системы. КПД магнитоиндукционной системы запуска, определяемый как отношение механической энергии, необходимой для запуска аппарата с заданной скоростью, к энергии, запасенной в конденсаторе, составляет порядка 6÷9%. Таким образом, исходя из условий запуска, например НС массой в 1 кг со скоростью 1 м/с в конденсаторе необходимо запасти не менее 50 Дж энергии, что можно обеспечить с помощью электролитического конденсатора 0.01 Ф × 100 В.
Силу, действующую на соленоид со стороны внешнего магнитного поля, можно оценить с помощью формулы:
F(t)=i(t)B0l,
где i(t) - результирующий ток через соленоид, напомним, что ток разряда складывается из двух токов: i(t)=iC(t)-ii(t), где ii(t) - индукционный в контуре, возникающий при движении соленоида, iC(t) - ток разряда конденсаторной батареи, B0 - суммарная индукция магнитного поля, создаваемого постоянными неодимовыми магнитами, l - длина провода соленоида находящегося в рабочем зазоре, l=nπD2, n - число витков, находящихся в рабочем зазоре, D2 - внешний диаметр катушки. Очевидно, что максимальная эффективность преобразования энергии магнитного поля в катушке в механическую энергию, при всех прочих равных условиях, определяется неравенством: n≤H/d, H - толщина магнитопроводов, образующих рабочий зазор, d - диаметр провода соленоида.
Возможность осуществления заявляемого изобретения показана следующим примером на выполненном макете.
Предлагаемое устройство было испытано на макете наноспутника массой 1 кг с габаритными размерами 100×100×100 мм.
В макетном варианте МИСЗ были использованы неодимовые магниты диаметром ⌀=9 мм и высотой hm=10 мм. Направляющая втулка 14, точнее ее часть, движущаяся в рабочем зазоре, в этом случае была выполнена из диэлектрика - стеклотекстолита, на ней был закреплен соленоид. Параметры соленоида - число витков, диаметр провода и т.д. - выбираются также исходя из энергетических соотношений и электрической прочности системы. Из этих соображений был рассчитан многослойный соленоид со следующими характеристиками: число витков N=84, число слоев - 10, индуктивность L - 48.43×10-6 Гн, внешний диаметр R2=27 мм, внутренний диаметр R1=11 мм, высота h=14 мм, активное сопротивление R=0.08 Ом, собственная частота ω0=1437 Гц, частота ω=1183 Гц, коэффициент затухания β=816, критическое сопротивление 0.14 Ом, диаметр провода ⌀=1 мм.
Полученная зависимость механической силы и ее интегральное значение для рассматриваемого случая оказалось равной:  Дж. Этого вполне достаточно, чтобы запускать наноспутники массами от 1 кг до 3 кг со скоростями 1 м/с, …, 3 м/с. На тепловое излучение в данной системе расходуется в общей сложности за время разряда Δt=0÷0.0015 с порядка 4.36 Дж энергии, в то время как в механическую энергию за этот интервал времени преобразуется всего лишь 0.02 Дж.
Дж. Этого вполне достаточно, чтобы запускать наноспутники массами от 1 кг до 3 кг со скоростями 1 м/с, …, 3 м/с. На тепловое излучение в данной системе расходуется в общей сложности за время разряда Δt=0÷0.0015 с порядка 4.36 Дж энергии, в то время как в механическую энергию за этот интервал времени преобразуется всего лишь 0.02 Дж.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |
| Механизм для запуска наноспутников | 2023 |
|
RU2829378C1 |
| УСТРОЙСТВО УПРАВЛЯЕМОГО ЗАПУСКА НАНОСПУТНИКОВ И МИКРОСПУТНИКОВ | 2014 |
|
RU2551408C1 |
| Транспортно-пусковой контейнер для спутников стандарта CubeSat | 2023 |
|
RU2819744C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| Роботизированный наноспутниковый комплекс спасения космонавтов | 2017 |
|
RU2653668C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2016 |
|
RU2629690C1 |
| СПОСОБ ЗАПУСКА НАНОСПУТНИКОВ В КАЧЕСТВЕ ПОПУТНОЙ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472679C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629922C1 |

Группа изобретений относится к космической технике. Способ запуска микро- и наноспутников заключается в том, что после установки запускаемого спутника с одноосным гироскопом на основании и после выбора с помощью электромеханической системы ориентации заданного направления производится раскрутка гироскопа и запуск аппарата. Электромеханическая часть микропроцессорной магнитоиндукционной системы запуска содержит механизмы поворота планшайбы запуска в азимутальном и зенитном направлениях, приводимые в действие шаговыми двигателями, управляемыми по командам микропроцессора. Для формирования механического импульса запуска служит соленоид, помещенный в рабочий зазор магнитной системы. Электромеханическая система также содержит электромагнит, фиксирующий спутник с установленным на его нижнем основании одноосным гироскопом. Микропроцессор системы запуска отключает электромагнит в момент отделения. Техническим результатом группы изобретений является обеспечение управляемого запуска наноспутников и микроспутников с сохранением ориентации в пространстве относительно главной оси отделенного аппарата. 2 н. и 2 з.п. ф-лы, 2 ил.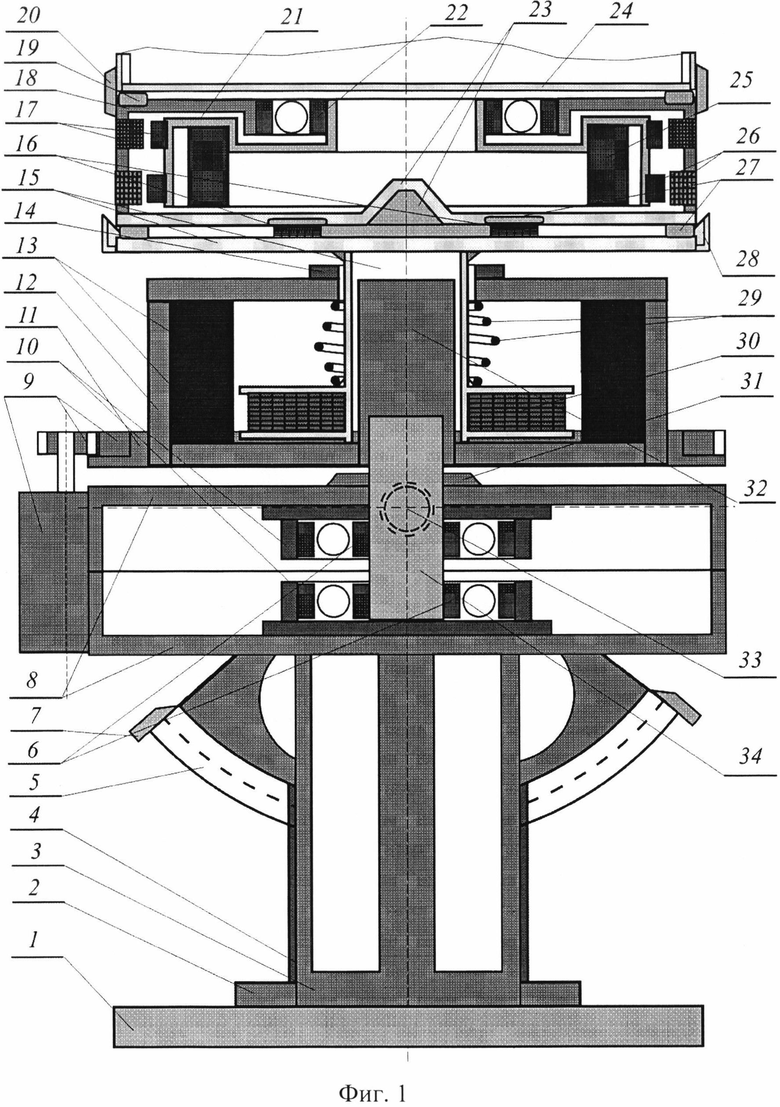
1. Способ запуска микро- и наноспутников, включающий их размещение на платформе, при котором после отделения основной нагрузки на безопасное расстояние отделяют попутные наноспутники с помощью импульсного магнитного поля, отличающийся тем, что перед запуском каждого спутника на его основание устанавливается одноосный гироскоп, после чего платформа запуска с установленным аппаратом ориентируется в заданных зенитном и азимутальном направлениях с помощью соответствующих систем привода, управляемых микропроцессором, после чего производится раскрутка одноосного гироскопа до заданного значения момента импульса и затем с помощью импульсного магнитного поля, импульс силы которого оказывается приложенным к отделяемому аппарату, осуществляется его отделение от платформы магнитоиндукционной системы запуска.
2. Устройство на основе микропроцессорной магнитоиндукционной системы для осуществления запуска, содержащее магнитоиндукционный эжектор и блок управления с микропроцессором, отличающееся тем, что содержит сильноточный соленоид, помещенный в рабочий зазор системы постоянных неодимовых магнитов и состоящий из набора кольцевых магнитов и соосно установленного неодимового цилиндрического магнита, заключенных в корпус, выполненный из магнитомягкого материала для экранирования электромагнитных помех, при этом соленоид подключен через электронный ключ к ждущему одновибратору, соединенному с микропроцессором, установленным на устройстве запуска, которое также соединено с формирователем токового импульса электронным ключом, состоящим из нескольких мощных полевых транзисторов, включенных параллельно друг другу, а также с блоком коррекции формы импульсов разряда от конденсаторной батареи.
3. Устройство по п. 2, отличающееся тем, что содержит электромагниты фиксации запускаемого аппарата, которые соединены с микропроцессором, расположенным в системе запуска.
4. Устройство по п. 2, отличающееся тем, что микропроцессор блока управления соединен через интерфейс с компьютером средства доставки и имеет свое постоянное запоминающее устройство, в котором хранится программное обеспечение процедур запуска, микропроцессор также соединен с преобразователем напряжения, который формирует напряжения для зарядки конденсаторной батареи и напряжение для питания сильноточной обмотки одноосного гироскопа, ждущим одновибратором и формирователями управляющих сигналов для шаговых двигателей ориентации.
| СПОСОБ ЗАПУСКА НАНОСПУТНИКОВ В КАЧЕСТВЕ ПОПУТНОЙ ПОЛЕЗНОЙ НАГРУЗКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472679C1 |
| УСТРОЙСТВО УПРАВЛЯЕМОГО ЗАПУСКА НАНОСПУТНИКОВ И МИКРОСПУТНИКОВ | 2014 |
|
RU2551408C1 |
| US 3380687 A1, 30.04.1968 | |||
| US 7178763 B2, 20.02.2007 | |||
| WO 2006068884 A1, 29.06.2006. | |||

