Изобретение относится к электротехнике, в частности к электрическим машинам, и может быть использовано в специальных электроприводах в качестве низкооборотных электродвигателей. Плоская конструкция электродвигателя с подшипником большого диаметра и отверстием внутри статора пригодна для приводов специальных устройств космического назначения, в частности направленных антенно-фидерных систем.
Известен вентильный реактивный электродвигатель (Беспалов В.Я., Котеленец Н.Ф. Электрические машины: учебное пособие для студ. высших учеб. заведений - М.: Издательский центр «Академия», 2010. - с. 229-232), состоящий из зубчатого статора, в пазах которого расположена многофазная обмотка, зубчатого ротора, вращающегося в подшипниках. Для обеспечения коммутации фаз обмотки статора с целью максимизации вращающего момента электродвигатель снабжен датчиком углового положения ротора.
Недостатком аналога вентильного реактивного электродвигателя является то, что оптимальные соотношения числа зубцов статора и полюсов ротора не выбраны.
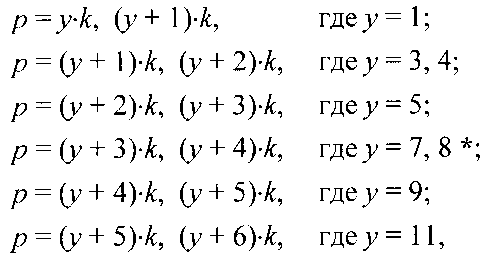
Известен электромеханический преобразователь (Патент на изобретение РФ 2441308, автор Захаренко А.Б., МПК H02K 19/10), содержащий, по меньшей мере, одну статорно-роторную пару, в которой статор состоит из сердечников из материала с высокой магнитной проницаемостью, торцами прикрепленных к опорному статорному кольцу и ориентированных параллельно основному магнитному потоку, и между которыми расположены проводники многофазной обмотки, ротор выполнен в виде двух коаксиально расположенных наружного и внутреннего индукторов - магнитопроводов из материала с высокой магнитной проницаемостью в форме полых цилиндров, закрепленных с возможностью вращения относительно статора, несущих расположенные по окружностям полюса с чередующейся полярностью, обращенные через рабочие зазоры к статору и охватывающие его, при этом полярность полюсов, расположенных на внутреннем и наружном индукторах друг напротив друга, согласная, отличающийся тем, что число пар полюсов p, число сердечников статора Z связаны соотношениями:
- для двухфазной обмотки (m=2):
для Z=y·m·k p=(y-1)·k, (y+1)·k, где y - четное число, y≥4; k - целое положительное число;
при этом y, k - целые положительные числа.
Недостатком прототипа электромеханического преобразователя является консольное крепление индукторов ротора, которое вследствие наличия силы магнитного притяжения между статором и ротором не позволяет увеличить диаметр машины. А увеличение диаметра благотворно сказалось бы на увеличении электромагнитной мощности. Кроме того, исходя из выбора в качестве основной гармоники МДС с максимальной амплитудой, наилучшими для m=3, Z=24, y=8, k=1 являются варианты с 2р=22, и 2р=24. Совпадение Z и 2р недопустимо из-за получения нежелательно устойчивого положения сердечников статора напротив магнитов ротора. Таким образом, соотношение, отмеченное «*», не является верным, его следует уточнить.
Следует отметить, что сердечники, прикрепленные к ярму (или выполненные с ним как единое целое, как в настоящем изобретении) и между которыми расположены проводники многофазной обмотки обычно называют зубцами [Иванов-Смоленский А.В. Электрические машины в 2-х томах. Учебник для вузов. - М.: Издательство МЭИ, 2004.]. Понятие «сердечник» в настоящем изобретении включает в себя ярмо с зубцами, как в вышеупомянутом учебнике.
Целью настоящего изобретения является уточнение оптимальных соотношений между числом Z зубцов статора и числом 2р полюсов ротора для синхронного реактивного электродвигателя.
Техническим результатом настоящего изобретения является максимизация электромагнитного момента и электромагнитной мощности низкооборотного синхронного реактивного электродвигателя за счет выбора числа полюсов ротора упомянутого электродвигателя, правильно согласованного с числом периодов гармоники МДС с максимальной среди высших гармоник амплитудой, т.е. с числом зубцов статора.
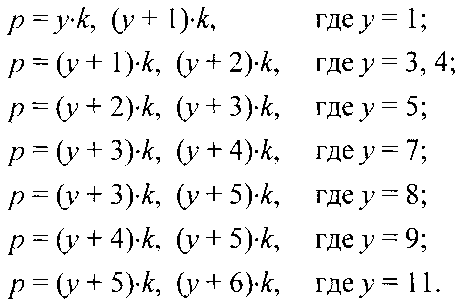
Для достижения технического результата необходимо выполнение следующих соотношений между числом пар полюсов ротора p и числом зубцов статора Z для трехфазной обмотки (m=3):

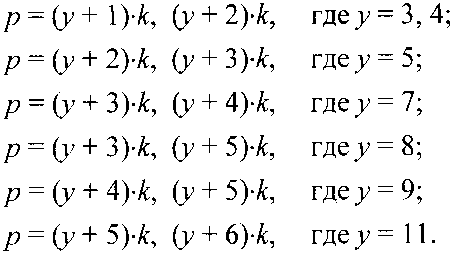
при этом Z=y×m×k, а также y, k - целые положительные числа.
Например, исходя из выбора в качестве основной гармоники МДС с максимальной амплитудой, для m=3, Z=24, y=8, k=1, необходимы следующие оптимальные соотношения p=(y+3)×k, (y+5)×k, то есть 2р=22, и 2р=26.
Настоящее изобретение поясняется фигурами чертежей:
Фиг. 1. Конструкция синхронного реактивного электродвигателя.
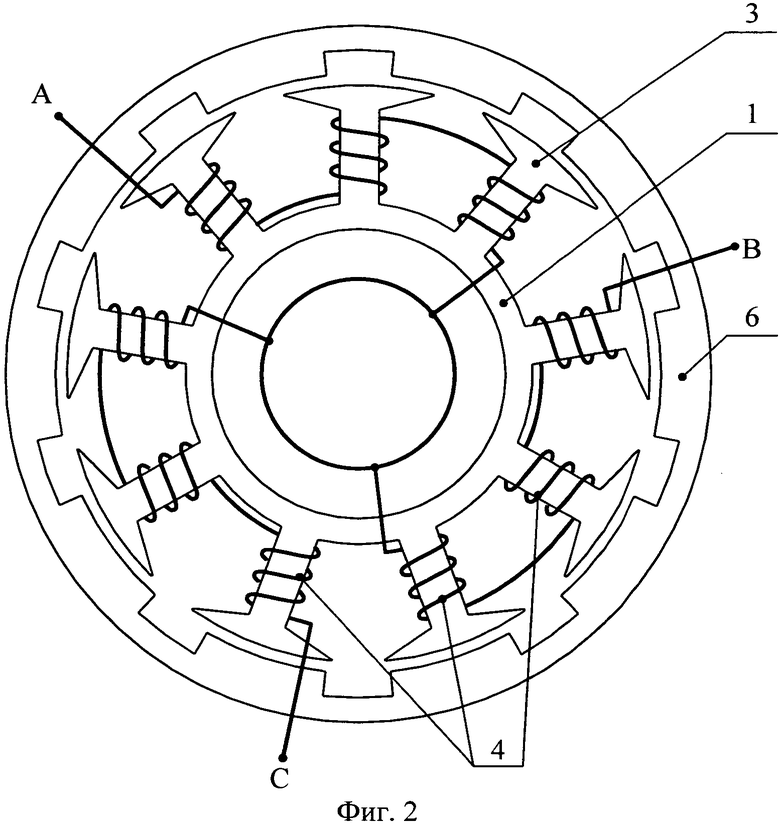
Фиг. 2. Конструкция активной части трехфазного синхронного реактивного электродвигателя.
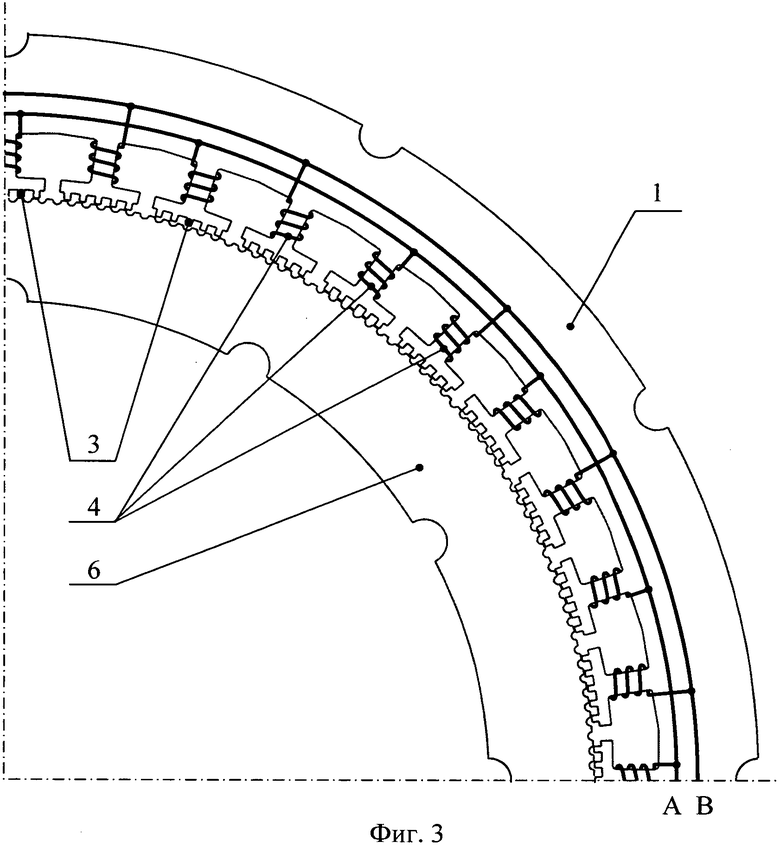
Фиг. 3. Конструкция активной части двухфазного синхронного реактивного электродвигателя (четверть поперечного сечения).
Конструкция синхронного реактивного электродвигателя Сердечник 1 статора (якоря) прикреплен к корпусу 2. Сердечник 1 выполнен из магнитомягкого материала. Сердечник 1 статора шихтован из электротехнической стали, корпус 2 статора выполнен из немагнитного материала. На зубцах 3 статора размещена m-фазная катушечная обмотка 4. На фигуре 2 показана трехфазная обмотка (m=3), буквами А, В, С обозначены начала соответствующих фаз. Катушечная обмотка 4 также может иметь другое число фаз, например, m=2. Катушки обмотки 4 статора наматываются из обмоточного провода, например, медного эмаль-провода. Катушки обмотки 4 статора последовательно соединяются в катушечные группы (на фигуре 2 в катушечной группе каждой фазы по 3 катушки). Для увеличения надежности катушечная группа, либо фаза в целом, может наматываться непрерывным проводом. Следует отметить, что при k≥1 катушечные группы между собой могут соединяться последовательно или параллельно. Кроме того, катушечные группы могут образовывать параллельные ветви (соединяться последовательно-параллельно) по нескольку последовательно соединенных катушечных групп в случае, если k=4, 6, 8, 10, четное число больше двух. Трехфазная обмотка 4 статора (m=3) может быть соединена в звезду (как показано на фиг. 2), а также
в треугольник. На немагнитном основании 5 закрепляется сердечник ротора 6. Ротор вращается относительно статора благодаря подшипнику 7. Подшипник 7 может быть выполнен в виде подшипника качения, например шарикового.
Принцип действия синхронного реактивного электродвигателя
На зажимы каждой фазы катушечной обмотки 4 статора синхронного реактивного электродвигателя подается переменное напряжение, по обмотке 4 протекает ток, вызывая вращающуюся МДС и магнитный поток статора. Магнитный поток каждой катушки обмотки 4 статора (якоря) проходит через воздушные зазоры между статором и ротором, зубцы 3 и ярмо сердечника 1 статора и замыкается по сердечнику 6 ротора. Обычно две гармоники МДС статора имеют наибольшую амплитуду. Ротор выполнен с числом полюсов (выступов), равным числу периодов одной из этих гармоник. При протекании электрического тока в обмотке 4 статора происходит силовое взаимодействие магнитного потока обмотки 4 с явнополюсным ротором за счет разности магнитной проводимости между зубцом статора и полюсом (выступом) ротора, а также между зубцом статора и междуполюсным промежутком ротора. Перемещаясь, волна МДС статора создает вращающий момент, действующий на статор и ротор. Ротор вращается, поскольку статор закреплен. При вращении ротора синхронный реактивный электродвигатель будет отдавать механическую мощность в нагрузку.
Питание обмотки 4 статора осуществляется от сети переменного тока, либо от инвертора. В случае питания от инвертора для наиболее эффективной работы синхронного реактивного электродвигателя вводится обратная связь по положению ротора. Положение ротора определяется по показаниям датчика углового положения ротора. В качестве датчика углового положения ротора может использоваться синусно-косинусный вращающийся трансформатор.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2013 |
|
RU2541427C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ДВОЙНОГО ВРАЩЕНИЯ | 2010 |
|
RU2437196C1 |
| ТОРЦЕВАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2007 |
|
RU2337458C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2339147C1 |
| СИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2006 |
|
RU2311715C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2354032C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2008 |
|
RU2379814C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2380814C1 |
Изобретение относится к электротехнике, в частности к электрическим машинам, и может быть использовано в специальных электроприводах в качестве низкооборотного электродвигателя. Технический результат - максимизация электромагнитного момента и электромагнитной мощности низкооборотного синхронного реактивного электродвигателя. Синхронный реактивный электродвигатель состоит из зубчатого статора, в пазах которого расположена трехфазная обмотка (m=3), зубчатого ротора, вращающегося в подшипниках. При этом число пар полюсов ротора p, число зубцов статора Z связаны соотношениями:
При этом Z=y·m·k, а также y, k - целые положительные числа. 10 з.п. ф-лы, 3 ил.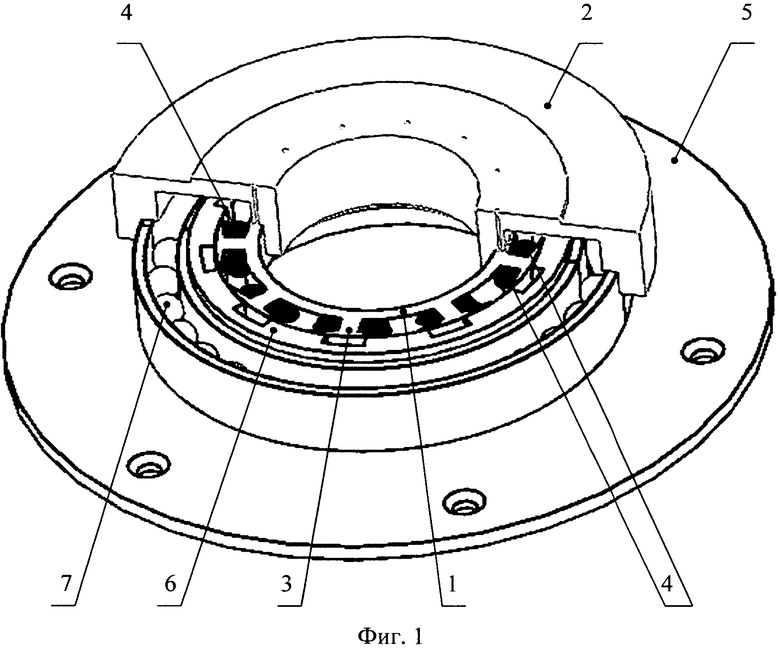
1. Синхронный реактивный электродвигатель, состоящий из зубчатого статора, в пазах которого расположена трехфазная обмотка (m=3), зубчатого ротора, вращающегося в подшипниках, отличающийся тем, что число пар полюсов ротора p, число зубцов статора Z связаны соотношениями:
при этом Z=y·m·k, а также y, k - целые положительные числа.
2. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что k≥1.
3. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что при четном k катушечные группы одной и той же фазы обмотки статора соединены параллельно.
4. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что катушечные группы одной и той же фазы обмотки статора соединены последовательно.
5. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что при четном k>2 катушечные группы одной и той же фазы обмотки статора соединены последовательно-параллельно.
6. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что обмотка статора соединена в звезду.
7. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что обмотка статора соединена в треугольник.
8. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что обмотка статора питается от сети переменного тока.
9. Синхронный реактивный электродвигатель по п. 1, отличающийся тем, что обмотка статора питается от управляемого инвертора.
10. Синхронный реактивный электродвигатель по п. 1, отличающийся наличием датчика углового положения ротора.
11. Синхронный реактивный электродвигатель по п. 10, отличающийся тем, что в качестве датчика углового положения ротора используется синусно-косинусный вращающийся трансформатор.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2441308C1 |
| Кипрегель | 1944 |
|
SU67347A1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| WO 2001029955 A1, 26.04.2001 | |||

