Изобретение относится к электротехнике, в частности к низкооборотным высокомоментным электрическим двигателям и электроприводам и высокочастотным электрическим генераторам.
Известны конструкции синхронных машин с трехфазной обмоткой якоря и обмоткой возбуждения индуктора (Иванов-Смоленский А.В. Электрические машины: Учебник для вузов. - М.: Энергия, 1980). Якорь выполняется неявнополюсным, несущим трехфазную распределенную разноименнополюсную р-периодную обмотку, индуктор выполняется явнополюсным или неявнополюсным, несущим разноименнополюсную р-периодную обмотку возбуждения. Электрическая связь с источником питания осуществляется непосредственно и при помощи щеточно-контактного узла. Наибольшее распространение получили синхронные машины, у которых обмотка якоря подключается к нагрузке (в режиме генератора) или к источнику трехфазного напряжения (в режиме двигателя) непосредственно, а обмотка возбуждения индуктора соединена с контактными кольцами и подключается к постоянному источнику напряжения через скользящие контакты при помощи щеток. Синхронные машины малой мощности могут изготавливаться и в обращенном исполнении, когда электрический контакт с обмоткой возбуждения осуществляется непосредственно, а с обмоткой якоря - через щеточно-контактный узел. Недостатком этих электрических машин является сложность выполнения распределенной обмотки якоря и наличие скользящих контактов. Кроме этого, синхронные машины данного класса в режиме двигателя имеют малые пусковые моменты, и для пуска их в ход применяют специальные меры, что усложняет конструкцию. А применение в этих машинах распределенной обмотки якоря снижает надежность по сравнению с катушечной сосредоточенной обмоткой якоря.
Известен принятый за прототип синхронный электродвигатель (А.с. СССР SU №1345291 А1, МПК Н02К 19/02, бюл. №38, 1987 г., автор А.Ф. Шевченко), содержащий статор с трехфазной обмоткой и активный ротор с чередующейся полярностью полюсов, статор выполнен с явно выраженными полюсами, причем числа полюсов статора ZS и ротора ZR выполнены в соотношении ZR=ZS±k, где ZS=3·k, a k=1, 2, 3,…, - катушки обмотки статора, принадлежащие одной фазе и расположенные на полюсах, сдвинутых на 360 эл. град., включены встречно. Недостатком описанного синхронного электродвигателя является наличие статора только с трехфазной обмоткой якоря, что уменьшает возможные применения данного устройства.
Целью настоящего изобретения является достижение высоких энергетических показателей магнитоэлектрической машины при высоком удельном (отнесенном к массе активных материалов) моменте на валу.
Задачей настоящего изобретения является оптимальный выбор соотношения числа явно выраженных полюсов якоря и числа пар полюсов индуктора, образованных постоянными магнитами, при выполнении сосредоточенной на полюсах якоря m-фазной катушечной обмотки якоря бесконтактной магнитоэлектрической машины.
Техническим результатом настоящего изобретения является расширение применения бесконтактной магнитоэлектрической машины, обладающей высокой технологичностью, надежностью, ремонтопригодностью. С этой целью якорь выполняется с m-фазной сосредоточенной на полюсах якоря катушечной обмоткой и с возможностью применения каркасных катушек, возбуждение индуктора выполняется от постоянных магнитов, имеющих чередующуюся полярность.
При применении бесконтактной магнитоэлектрической машины в качестве синхронного двигателя питание обмотки якоря осуществляется:
- от источника трехфазного переменного напряжения,
- от источника двухфазного переменного напряжения со сдвигом начальных фаз напряжений на 90 эл. град. и полученного из трехфазной системы с нулем,
- от источника однофазного переменного напряжения при помощи фазосдвигающего элемента,
- от m-фазного источника переменного напряжения постоянной частоты,
- от m-фазного источника переменного напряжения регулируемой частоты,
- от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
При применении бесконтактной магнитоэлектрической машины в качестве двигателя постоянного тока с независимым возбуждением питание обмотки якоря осуществляется прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента. Бесконтактная магнитоэлектрическая машина может также работать в качестве синхронного m-фазного генератора синусоидальной ЭДС и в качестве синхронного m-фазного генератора ЭДС прямоугольной формы.
В настоящем изобретении магнитный поток возбуждения создается постоянными магнитами индуктора, имеющими чередующуюся полярность «N-S», а m-фазная обмотка якоря размещена на сердечнике якоря. Индуктор является ротором, а якорь - статором. Возможны исполнения ротора с постоянными магнитами любого типа - с радиальным размещением магнитов, с тангенциальным размещением магнитов (ротор коллекторного типа), сборный мозаичный ротор (типа РОМС). Возможны исполнения бесконтактной магнитоэлектрической машины с внешним якорем и внутренним индуктором, с внутренним якорем и внешним индуктором.
Сущность изобретения поясняется чертежами:
фиг.1 - общий вид бесконтактной магнитоэлектрической машины с внутренним индуктором и внешним якорем, ротор выполнен с постоянными магнитами, намагниченными в радиальном направлении и прикрепленными непосредственно к магнитопроводу,
фиг.2-15 - примеры реализации изобретения в виде поперечных сечений сердечников якоря и индуктора, схем соединения катушек обмоток якоря и включение обмоток якоря на источники напряжений с различным числом фаз и диаграмм токов (МДС).
В соответствии с настоящим изобретением для получения наилучших энергетических показателей бесконтактной магнитоэлектрической машины между числом полюсов якоря Z1, числом пар полюсов индуктора p и числом фаз обмотки якоря m=3, 4, 5, 6… установлена связь (1):

Для получения максимального удельного момента на валу бесконтактной магнитоэлектрической машины число полюсов якоря Z1, число пар полюсов индуктора р, число фаз обмотки якоря m, число модулей с связаны равенствами (2) и (3):


где m=3, 4, 5, 6…; с=1, 2, 3, 4… Модулем бесконтактной магнитоэлектрической машины является соотношение полюсов якоря и пар полюсов индуктора «элементарной машины» в составе бесконтактной магнитоэлектрической машины. Модуль представляет собой неделимую дробь и определяется соотношением Мz=m/(m-1). Число модулей может быть не менее одного и определяется равенством с=Z1-p.
Катушки обмотки в фазе якоря должны быть соединены между собой таким образом (согласно или встречно), чтобы векторы наведенных в них ЭДС, геометрически складываясь, образовывали максимальную суммарную ЭДС фазы якоря бесконтактной магнитоэлектрической машины.
Катушки обмотки фазы якоря разных модулей могут быть соединены между собой последовательно, параллельно, а при с=4, 6, 8, 10… - последовательно-параллельно, т.е. смешанно.
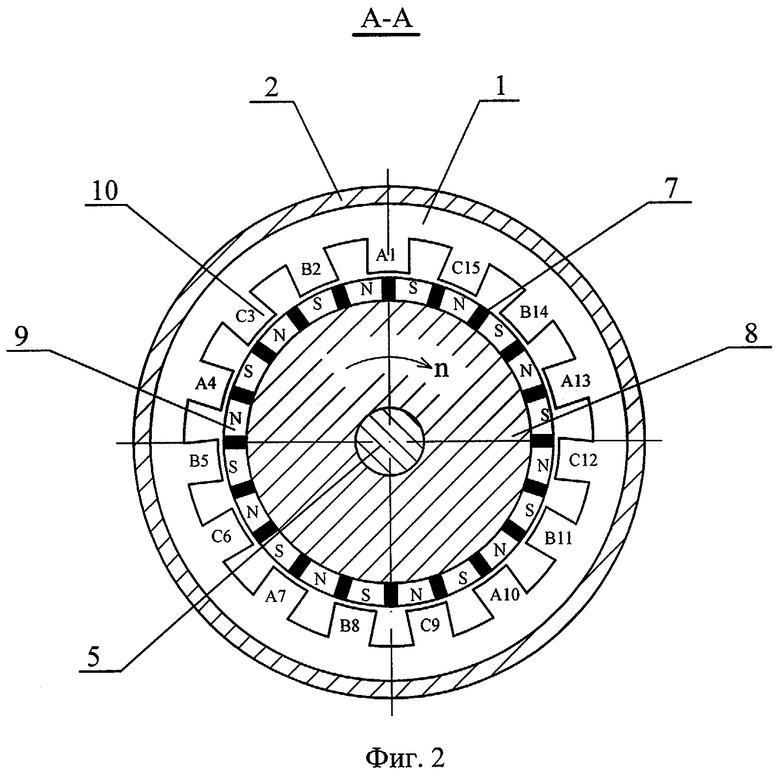
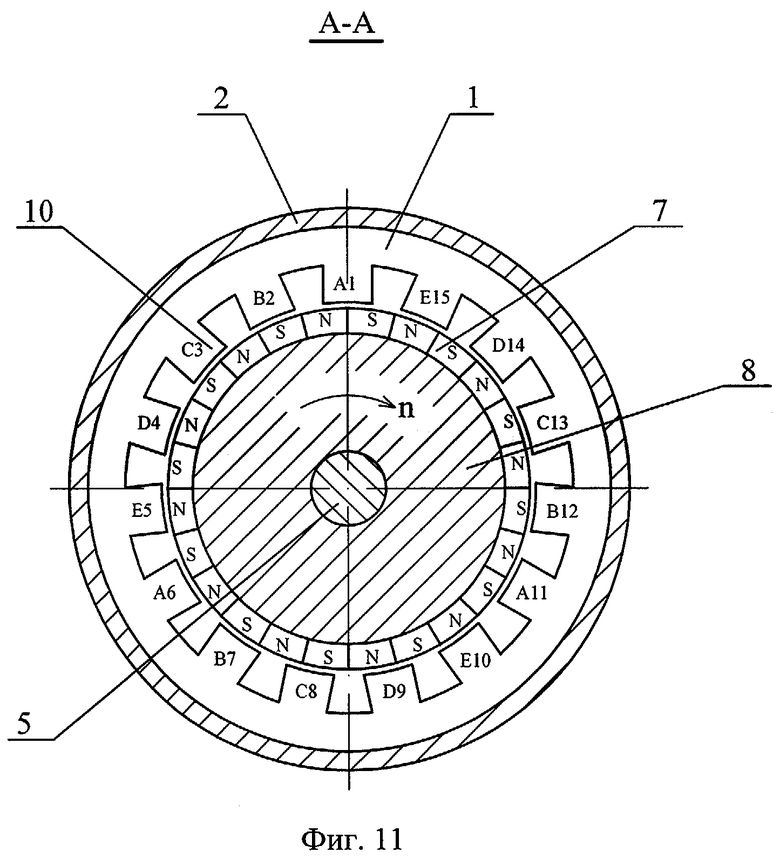
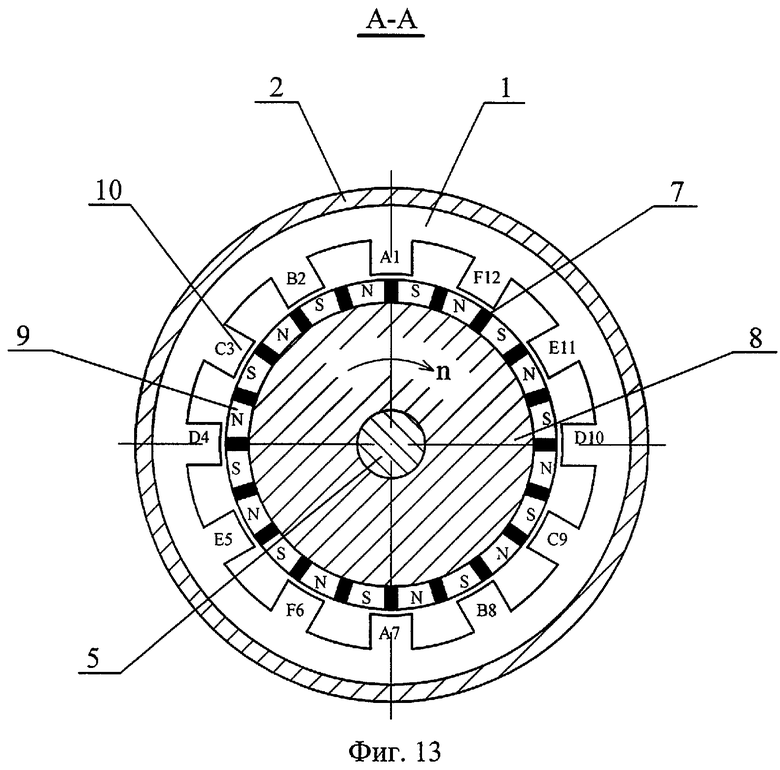
На фиг.2÷15 представлены примеры реализации изобретения в соответствии с формулами (2) и (3) в виде поперечных сечений сердечников якоря и индуктора бесконтактной магнитоэлектрической машины, схем соединения катушек m-фазных обмоток якоря при включении обмоток якоря на источники напряжений с различным числом фаз и диаграмм токов (МДС). Соответствие чертежей поперечных сечений сердечников якоря и индуктора и схем соединения катушек m-фазных обмоток якоря поясняется в таблице. Буква m в таблице обозначает количество фаз обмотки якоря бесконтактной магнитоэлектрической машины, а mист. - количество фаз источника напряжения. Положение сердечника индуктора относительно сердечника якоря на чертеже в двигательном режиме соответствует моменту времени, при котором показано положение векторов токов на соответствующей схеме соединения катушек m-фазной обмотки якоря (см. таблицу).
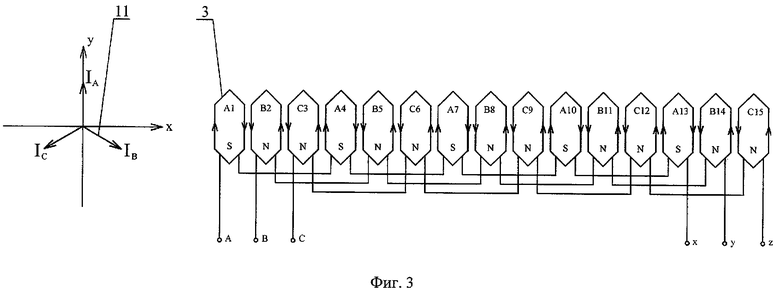
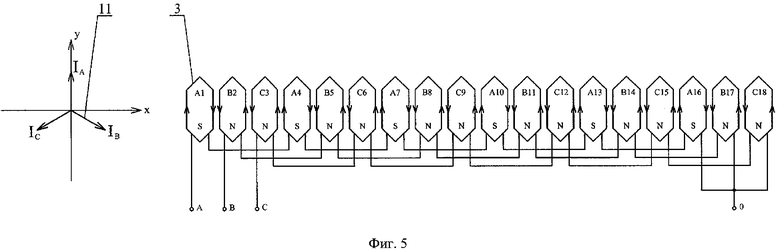
На фиг.3 и 5 представлены схемы соединений катушек 3 - фазной обмотки якоря с подключением на 3
- фазной обмотки якоря с подключением на 3 - фазный источник напряжения.
- фазный источник напряжения.
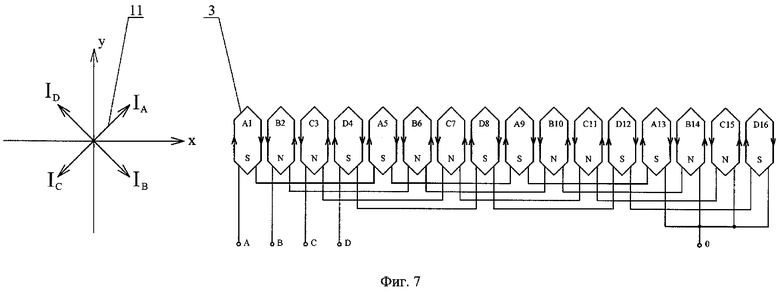
На фиг.7 представлена схема соединений катушек 4 - фазной обмотки якоря с подключением на 4 - фазный источник напряжения.
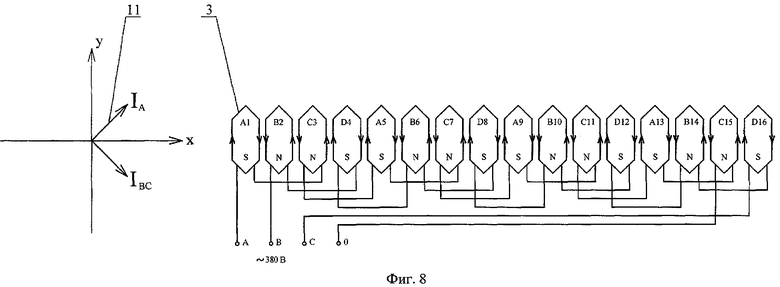
На фиг.8 представлена схема соединений катушек 4 - фазной обмотки якоря с подключением на 3 - фазный источник напряжения с нулем. Следует иметь ввиду, что при такой схеме числа витков катушек обмотки якоря, подключенных к фазе «А» и нулю источника напряжения, должны быть приблизительно в √3 раз меньше числа витков катушек обмотки якоря, подключенных к фазам «В» и «С» источника напряжения, то есть kтр.=wBC/wA≈√3, здесь kтр. - коэффициент трансформации обмоток фаз якоря.
На фиг.9 представлена схема соединений катушек 4х - фазной обмотки якоря с подключением на 2 - фазный источник напряжения с искусственным нулем. Такую схему 2 - фазного источника напряжения можно получить из 3 - фазного источника напряжения при помощи разделительного трансформатора и понижающего трансформатора с коэффициентом трансформации трансформатора ≈ √3. При этом число витков во всех катушках обмотки якоря машины одинаково.
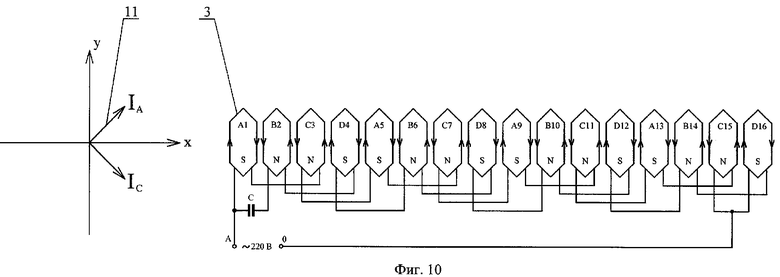
На фиг.10 представлена схема соединений катушек 4 - фазной обмотки якоря с подключением в однофазную сеть переменного тока промышленной частоты. Сдвиг фаз, необходимый для работоспособности машины, обеспечивается при помощи фазосдвигающего элемента, в данном случае при помощи емкости С. При этом wAN - это число витков катушек обмотки якоря, подключенных непосредственно к фазе «А» и нулю, wCN - это число витков катушек обмотки якоря, подключенных к фазе «А» и нулю через фазосдвигающую емкость С. Коэффициент трансформации обмоток фаз якоря лежит в пределах kтр.=wCN/wAN=1÷2.
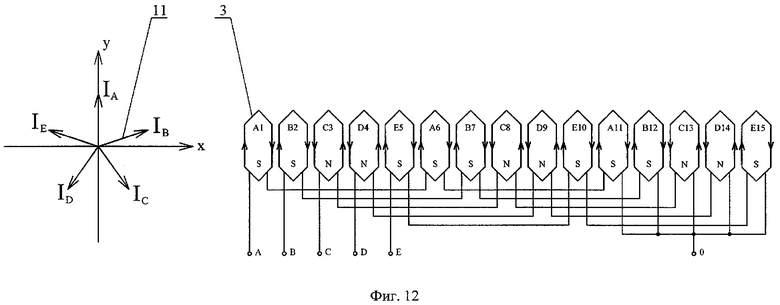
На фиг.12 представлена схема соединений катушек 5 - фазной обмотки якоря с подключением на 5
- фазной обмотки якоря с подключением на 5 - фазный источник напряжения.
- фазный источник напряжения.
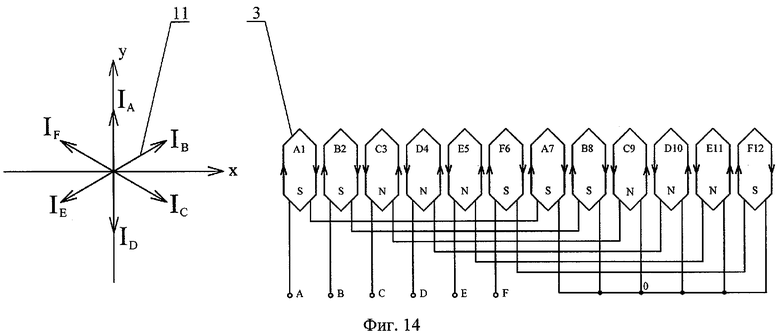
На фиг.14 представлена схема соединений катушек 6 - фазной обмотки якоря с подключением на 6 - фазный источник напряжения.
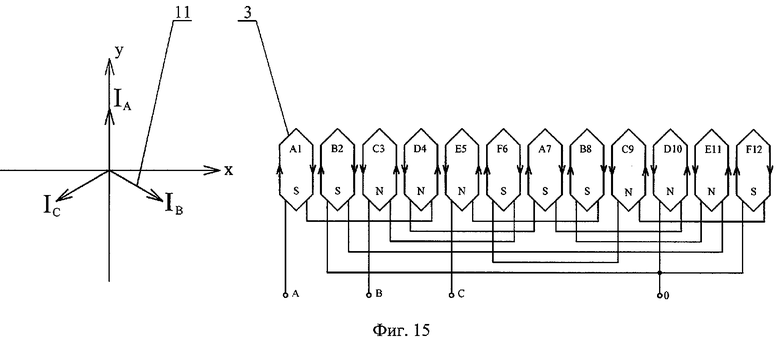
На фиг.15 представлена схема соединений катушек 6 - фазной обмотки якоря с подключением на 3 - фазный источник напряжения.
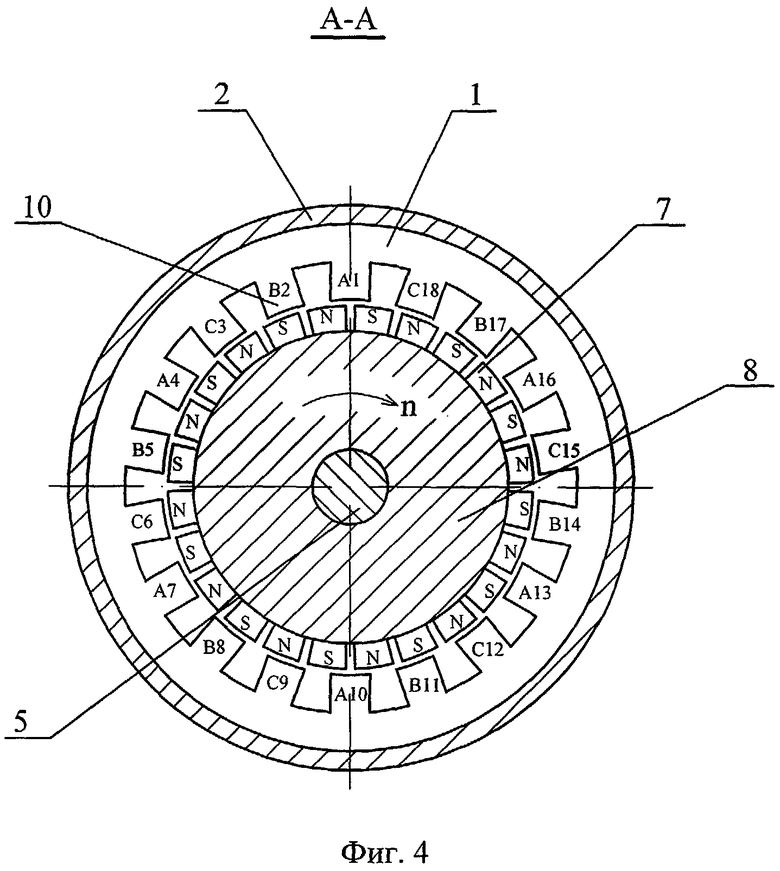
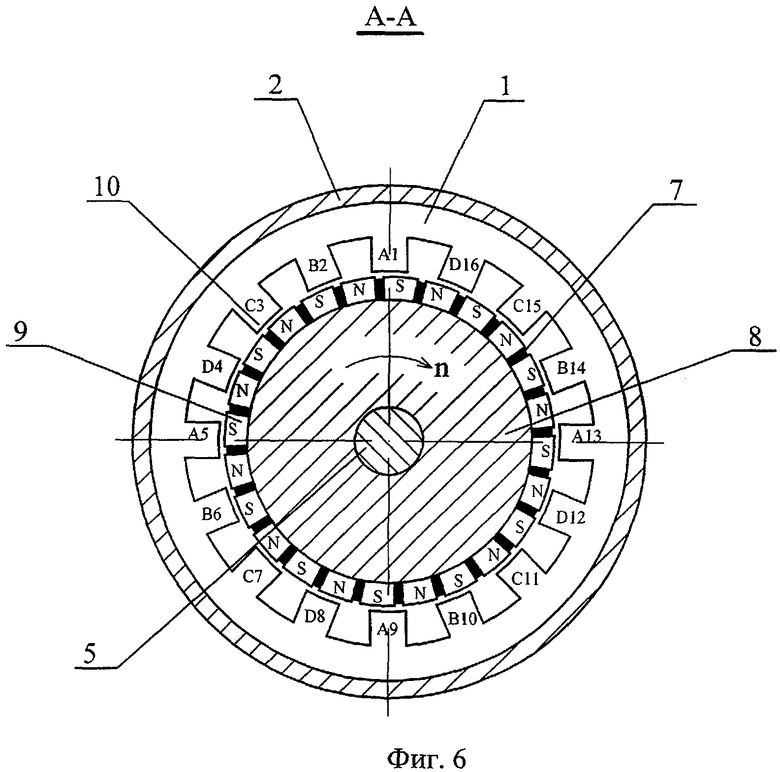
Рассмотрим конструкцию бесконтактной магнитоэлектрической машины с внешним якорем и внутренним индуктором (фиг.1). Перемагничиваемый с высокой частотой сердечник 1 якоря выполнен шихтованным из электротехнической стали с высокой магнитной проницаемостью и запрессован в корпусе 2, выполненного из стали или из сплава алюминия. На каждом из полюсов 10 якоря размещена катушечная обмотка 3 якоря. Катушки обмотки 3 якоря выполняются из обмоточного медного провода или медной обмоточной шины и могут наматываться на намоточных станках непосредственно и затем изолироваться либо наматываться на каркасы, выполненные из изоляционных материалов. Индуктор при помощи подшипников 4, вала 5 и подшипниковых щитов 6 позиционирован относительно якоря. Вал 5 выполнен из стали. Активная часть индуктора состоит из постоянных магнитов 7 и при использовании роторов с радиальным размещением магнитов (фиг.4 и 11) втулки 8, которая является магнитопроводом и выполняется из материала с высокой магнитной проницаемостью. При использовании роторов коллекторного типа (фиг.2, 6 и 13) активная часть индуктора собирается из тангенциально расположенных постоянных магнитов 7 и чередующимися с ними элементами магнитопровода 9, которые выполняются из материала с высокой магнитной проницаемостью, таким образом, чтобы образовывалась чередующаяся полярность полюсов «N-S» индуктора, и крепится к втулке 8, выполненной из немагнитного материала, чтобы магнитный поток возбуждения не замыкался сам на себя. Магнитный поток индуктора (фиг.1 и 4) выходит из постоянных магнитов с полярностью «N», пронизывает воздушный зазор между индуктором и якорем, проходит через полюса якоря, ярмо якоря, вновь через полюса якоря, пронизывает воздушный зазор между индуктором и якорем, входит в постоянные магниты с полярностью «S» и замыкается через магнитопровод 8.
Бесконтактная магнитоэлектрическая машина работает в двигательном и генераторном режимах.
Рассмотрим двигательный режим (фиг.1). На фазы обмотки 3 якоря из внешней цепи - цепи питания - непосредственно подают переменное напряжение, по обмотке протекает переменный ток, наводящий переменную во времени МДС якоря. На фиг.3, 5, 7, 8-10, 12, 14, 15 представлены векторные диаграммы токов 11 для соответствующих многофазных обмоток, представленных на этих же чертежах. Симметричные многофазные напряжения, поданные на зажимы этих обмоток, изменяются во времени, и векторы токов 11 поворачиваются в осях координат xy. Рассмотрим момент времени, когда токи проецируются на ось ординат. Катушки обмотки 3 якоря названы буквой, обозначающей принадлежность к соответствующей фазе, и цифрой, обозначающей номер полюса сердечника 1 якоря. Например, катушка СЗ-катушка фазы С, расположенная на третьем полюсе сердечника 7 якоря. На фиг.3, 5, 7, 8-10, 12, 14, 15 обозначены направления токов в катушках в соответствии с проекцией векторов токов на ось у. При этом полюса 10 якоря, на которых расположены катушки обмотки якоря, образуют южные полюса «S» и северные полюса «N». Вследствие взаимодействия переменной МДС якоря с постоянной МДС индуктора, созданной постоянными магнитами 7, к ротору приложен вращающий момент, т.е. при изменении питающих напряжений, поданных на обмотку якоря с частотой f (Гц), ротор вращается с синхронной частотой вращения n=60·f/p (об/мин). Направление вращения ротора на чертежах показано стрелкой с буквой «n».
Рассмотрим генераторный режим (фиг.1). При вращении ротора сторонним источником момента с частотой вращения n магнитный поток индуктора, пронизывая воздушный зазор и полюса 10 якоря то со стороны индуктора, то со стороны якоря, создает в полюсах 10 якоря переменный магнитный поток, наводящий в катушках обмотки 3 якоря переменную ЭДС. Если внешняя цепь - цепь нагрузки замкнута, то по обмотке 3 якоря протекает ток, электрическая мощность отдается потребителю.
Фазы обмотки якоря могут быть соединены в звезду, а также в многоугольник. Катушки обмотки фазы якоря разных модулей могут быть соединены между собой последовательно, параллельно, а при с=4, 6, 8, 10… - последовательно-параллельно, т.е. смешанно.

Изобретение относится к области электротехники, в частности к низкооборотным высокомоментным электрическим двигателям и электроприводам, а также к высокочастотным электрическим генераторам. Бесконтактная магнитоэлектрическая машина содержит индуктор с постоянными магнитами, образующими чередующуюся полярность полюсов индуктора, и шихтованный якорь с явно выраженными полюсами, m-фазная обмотка которого состоит из катушек, охватывающих по одному полюсу якоря. При выполнении определенных, в соответствии с данным изобретением, соотношений между числом полюсов якоря Z1, числом пар полюсов индуктора p, числом фаз обмотки якоря m и числом модулей с достигается технический результат, состоящий в обеспечении большого удельного вращающего момента при низких частотах вращения в двигательном режиме, а в генераторном режиме - большой удельной мощности при высоких частотах при одновременном обеспечении высокой надежности, технологичности и ремонтопригодности предлагаемой бесконтактной магнитоэлектрической машины. 13 з.п. ф-лы, 15 ил., 1 табл.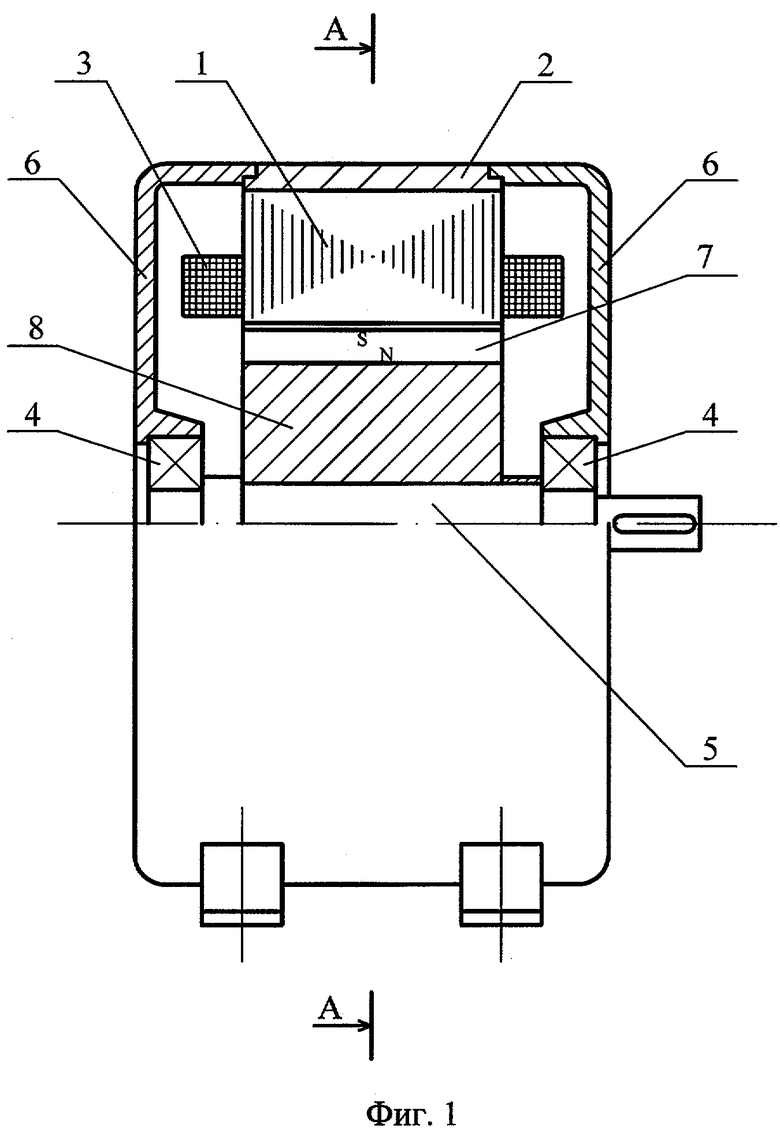
1. Бесконтактная магнитоэлектрическая машина, содержащая статор с обмоткой якоря и активный ротор с чередующейся полярностью полюсов, отличающаяся тем, что сердечник якоря выполнен шихтованным с явно выраженными полюсами, на полюсах расположена катушечная m-фазная обмотка якоря, при этом между числом полюсов якоря Z1, числом пар полюсов индуктора p, числом фаз обмотки якоря
m=3, 4, 5, 6… установлена связь: 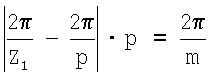
2. Бесконтактная магнитоэлектрическая машина по п.1, отличающаяся тем, что число полюсов якоря Z1=m·с, число пар полюсов индуктора p=(m-1)·с, где с=1, 2, 3, 4… - число модулей в составе бесконтактной магнитоэлектрической машины.
3. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что якорь расположен снаружи, индуктор - внутри.
4. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что индуктор расположен снаружи, якорь - внутри.
5. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от m-фазного источника переменного напряжения постоянной частоты.
6. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от m-фазного источника переменного напряжения регулируемой частоты.
7. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от источника постоянного напряжения посредством управляемого инвертора, подающего синусоидальное напряжение на фазы обмотки якоря в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
8. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при применении ее в качестве двигателя постоянного тока с независимым возбуждением питание обмотки якоря осуществляется прямоугольными импульсами напряжения от электронного коммутатора по определенному алгоритму в зависимости от показаний датчика углового положения ротора для достижения максимального вращающего момента.
9. Бесконтактная магнитоэлектрическая машина по п.5, отличающаяся тем, что при применении ее в качестве синхронного двигателя питание обмотки якоря осуществляется от однофазного источника переменного напряжения постоянной частоты при помощи фазосдвигающего элемента.
10. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при с>1 катушки обмотки якоря разных модулей одной и той же фазы соединены последовательно.
11. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при с>1 катушки обмотки якоря разных модулей одной и той же фазы соединены параллельно.
12. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что при с=4, 6, 8, 10… катушки обмотки якоря разных модулей одной и той же фазы соединены последовательно-параллельно (смешанно).
13. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что фазы обмотки якоря соединены в звезду.
14. Бесконтактная магнитоэлектрическая машина по п.2, отличающаяся тем, что фазы обмотки якоря соединены в многоугольник.
| Синхронный электродвигатель | 1986 |
|
SU1345291A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА МАГНИТОЭЛЕКТРИЧЕСКОГО ТИПА | 1998 |
|
RU2143777C1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2190292C2 |
| Кипрегель | 1944 |
|
SU67347A1 |
| US 5117142 А, 26.05.1992 | |||
| Статистический анализатор | 1974 |
|
SU484525A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ СПОСОБНОСТИ САМОСТОЯТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ОГРАНИЧЕННОГО В СВОЕЙ МОБИЛЬНОСТИ ЧЕЛОВЕКА | 2019 |
|
RU2774223C1 |
| ИВАНОВ-СМОЛЕНСКИЙ А.В | |||
| Электрические машины | |||
| - М.: Энергия, 1980, с.490-491. | |||

