Изобретение относится к железнодорожным транспортным средствам, в частности к электрооборудованию транспортных средств с электротягой, и касается способа управления скоростью движения тепловоза, путевых машин.
Известен способ автоматического регулирования скорости движения поезда, осуществляемый путем задания требуемого значения скорости движения, в котором используют двухступенчатый режим плавного изменения заданного ускорения (замедления) движения, а следовательно, и силы тяги (торможения), при малых скоростях движения, когда сигнал обратной связи по скорости содержит значительную погрешность, используют устройство задания силы, которое реализует зависимость между входными и выходными величинами на основании информации о доле максимального ускорения, реализуемого во время выполнения первой ступени, величине силы тяги локомотива, реализуемой в процессе пуска поезда, постоянных времени устройства задания силы и величине времени задержки между применением ступеней (RU, патент на изобретение №2399515 С1, кл. B60L 15/20, опубл. в 2010 г.).
Недостатком технического решения является то, что при работе на малых («ползучих») скоростях движения, которые требуются для работы путевых машин или при работе на горке (рабочие скорости движения составляют величину порядка 3-10 км/ч), практически невозможно определить величины ускорений, что делает техническое решение неработоспособным.
Известен способ регулирования скорости движения локомотива с поездом, при котором текущее значение скорости движения, получаемое с помощью датчика скорости, сравнивается с заданным значением в сравнивающем устройстве, разность подается на вход усиливающего устройства, выполненное в виде релейного устройства, далее выходной сигнал релейного устройства подается на вход блока регулирования мощности энергетической установки (Автоматические системы управления локомотивов. М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2009, с 398-418. Авт.: Н.М.Луков, А.П.Космодамианский).
Недостатком технического решения является то, что релейный принцип регулирования обуславливает значительную степень колебательности процессов в энергетической установке локомотива и соответственно скорость движения также имеет колебательный характер, что делает невозможным использование технического решения в условиях работы путевой техники и в горочной работе.
Известен способ регулирования скорости тепловоза с электрической передачей, принятый за прототип, заключающийся в том, что выделяют сигнал, пропорциональный скорости движения, сравнивают его с заданным значением и изменяют напряжение тягового генератора, причем выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя, фиксируют момент времени, когда разность величин сигналов, пропорциональных фактической и заданной скоростям движения, становится меньше заданной величины, сигнал, пропорциональный величине этой разности, интегрируют и по величине полученного сигнала корректируют напряжение тягового генератора (SU, авторское свидетельство на изобретение №1199676, кл. B60L 15/20, опубл. в 1985 г.).
Недостатком способа регулирования скорости является то, что не учитываются условия движения локомотива с составом, его вес, профиль участка, по которому движется состав, что снижает точность и быстродействие системы регулирования скорости движения.
Техническим результатом заявленного изобретения является повышение точности и быстродействия регулирования скорости движения с исключением колебательных процессов в энергетической установке тепловоза.
Технический результат достигается тем, что в способе регулирования скорости движения тепловоза с электрической передачей, заключающемся в том, что выделяют сигнал, пропорциональный скорости движения, сравнивают его с заданным значением и изменяют напряжение тягового генератора, выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя, фиксируют момент времени, когда разность величин сигналов, пропорциональных фактической и заданной скоростям движения, становится меньше наперед заданной величины, сигнал, пропорциональный величине этой разности, интегрируют, вычисляют сопротивление движению по наперед заданным значениям веса тепловоза с составом и профиля участка движения, по вычисленному значению сопротивления движению и известным характеристикам тягового электродвигателя определяют уставку требуемого значения тока тягового генератора по известной величине силы тяги тепловоза, перемножают величину сигнала, пропорционального магнитному потоку тягового электродвигателя, с величиной заданного значения скорости движения, полученный результат нормируют, корректируют по величине падения напряжения на сопротивлении цепей тяговых электродвигателей, результат корректировки принимают за уставку напряжения тягового генератора, определяют уставку требуемой мощности тягового генератора, для чего величину уставки напряжения тягового генератора перемножают с уставкой тока тягового генератора, скорректированной по результату интегрирования разности величин сигналов, пропорциональных фактической и заданной скоростям движения, результат умножения нормируют и по полученному результату регулируют мощность тягового генератора.
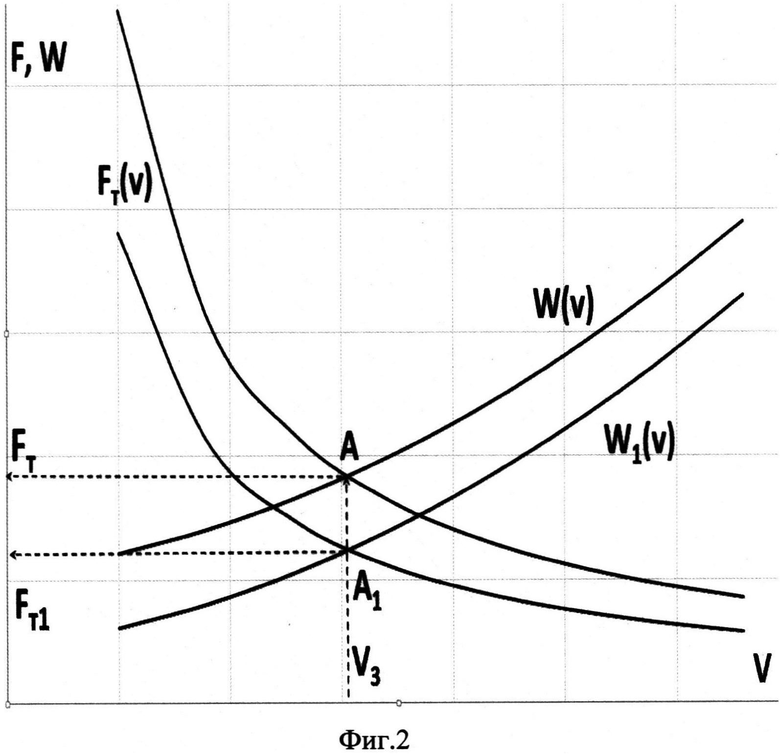
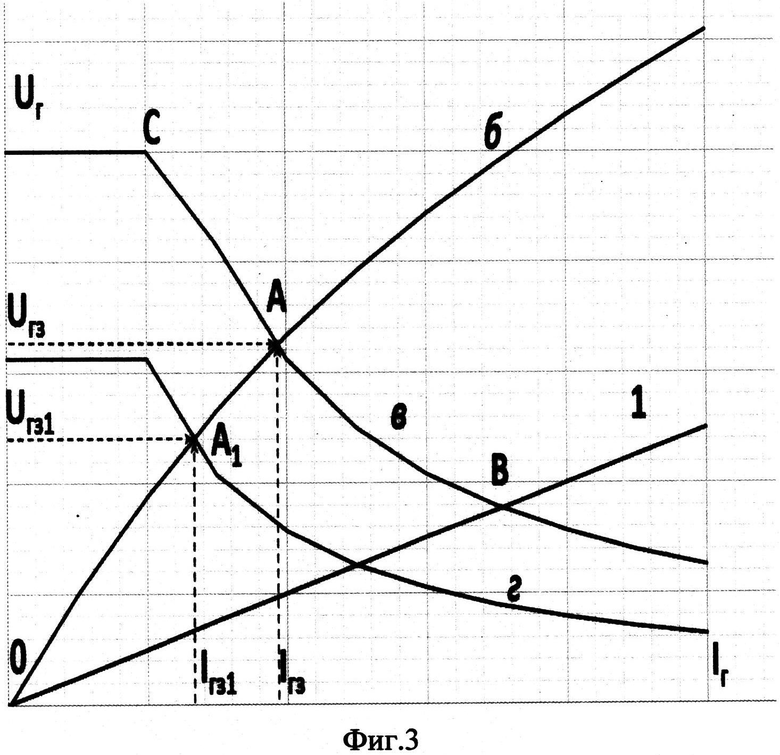
На фиг. 1 представлена блок-схема устройства, реализующая способ, на фиг. 2 представлены тяговые характеристики - зависимости силы тяги FT от скорости V (FT=f(V)) и характеристики основного сопротивления движению тепловоза W1(V) и W2(V) для разных весов составов от скорости движения V (W=f(V)), на фиг. 3 - напряжение на тяговых электродвигателях тепловоза Uдв в функции тока нагрузки генератора Uдв=f(Iг) для стоящего тепловоза V=0 (кривая а) и при заданной скорости движения V=Vз (кривая б) и характеристики тягового генератора Uг=f(Iг) при двух значениях постоянной мощности тягового генератора Ргз (кривая в) и Ρгз1 (кривая г).
Устройство (фиг. 1) состоит из датчика скорости 1, блока сравнения 2, входы которого соединены с выходами датчика скорости 1 и задатчика 3, выход блока сравнения 2 соединен с входом порогового устройства 4, выход которого соединен с входом интегратора 5, выход задатчика соединен с входом блока 6 оценки сопротивления движению, выход которого соединен с входом блока 7 расчета уставки тока тягового генератора, выход блока 7 расчета уставки тока тягового генератора соединен с первым входом сумматора 8, второй вход которого соединен с выходом интегратора 5, выход сумматора 8 соединен с первым входом блока 9 вычисления уставки напряжения тягового генератора, второй вход которого соединен с выходом задатчика 3, выход блока 9 вычисления уставки напряжения тягового генератора соединен с первым входом блока 10 умножения, второй вход блока 10 умножения соединен с выходом сумматора 8, а выход блока 10 умножения соединен с входом блока 11 регулирования мощности тягового генератора.
Способ осуществляется следующим образом.
Датчиком 1 скорости движения (фиг. 1) выделяют сигнал, пропорциональный скорости движения, в блоке 2 сравнения сравнивают его с сигналом, пропорциональным заданному значению скорости движения тепловоза Vз, поступающим с выхода задатчика 3, в качестве которого может использоваться штатный контроллер машиниста либо устройство дистанционного управления (при необходимости удаленного управления тепловозом), изменяют напряжение тягового генератора (на фиг. 1 не показан), с помощью порогового устройства 4 фиксируют момент времени, когда разность величин сигналов, пропорциональных фактической и заданной скоростям движения, поступающая на вход порогового устройства 4, становится меньше наперед заданной величины, сигнал, пропорциональный величине этой разности, интегрируют, для чего с выхода порогового устройства 4 подают его на вход интегратора 5, выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя, в блоке 6 оценки сопротивления движению по заданному значению скорости движения Vз, наперед заданным значениям веса тепловоза (Р) с составом (Q) и профиля участка (i), по которому движется тепловоз, вычисляют значение сопротивления движению (W) тепловоза с составом в соответствии с выражением:
W=(wo±i)∗(P+Q), где
W - сопротивление движению тепловоза с составом;
wo - основное удельное сопротивление движению;
i - продольный профиль участка, по которому движется локомотив, знак (+), если подъем, знак (-), если уклон;
Ρ - вес тепловоза;
Q - вес состава.
Для заданного значения скорости движения Vз и вычисленному значению сопротивления движению W определяют величину силы тяги тепловоза Fт=WА, которую должен развить тепловоз для достижения этой скорости, этому режиму соответствует точка А на фиг. 2, в которой достигается равенство силы тяги и сопротивления движению Fт=WA.
Как известно, сила тяги тепловоза FT однозначно определяется известными характеристиками тяговых электродвигателей и суммарным током нагрузки тяговых электродвигателей Σ Iя, или током нагрузки тягового генератора Iг. В блоке 7 расчета уставки тока тягового генератора (фиг. 1) решают обратную задачу и определяют уставку требуемого значения тока Iгз тягового генератора по известной величине силы тяги тепловоза Fт. В сумматоре 8 корректируют поданную на его первый вход с выхода блока 7 расчета уставки тока тягового генератора величину уставки тока тягового генератора на величину результата интегрирования, поступающего на второй вход сумматора 8 с выхода интегратора 5.
В блоке 9 вычисления уставки напряжения тягового генератора (фиг. 1) по скорректированной уставке тока тягового генератора Iгз, поступающей с выхода сумматора 8 на первый вход блока 9 вычисления уставки напряжения тягового генератора, выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя, и перемножают его с поступающим с выхода задатчика 3 сигналом заданного значения скорости движения тепловоза Vз, полученный результат умножения нормируют и корректируют полученный результата на величину падения напряжения на сопротивлении цепей тяговых электродвигателей тепловоза, результат корректировки принимают за уставку напряжения тягового генератора Uгз в соответствии с выражением:
Urз=К∗СФтэд∗Vз+Iгз∗ΣR, где
К - нормирующий коэффициент;
СФтэд - магнитный поток тяговых электродвигателей (определяемый по известной в литературе характеристике намагничивания магнитной системы тяговых электродвигателей);
Vз - заданное значение скорости движения тепловоза;
Ιгз∗ΣR - падение напряжения на сопротивлении цепей тяговых электродвигателей тепловоза;
ΣR - суммарное сопротивление цепей тяговых электродвигателей тепловоза.
Далее в блоке 10 умножения (фиг. 1) определяют уставку требуемой мощности тягового генератора Ргз путем перемножения полученных ранее уставок напряжения тягового генератора Uгз и тока Iгз тягового генератора, поступающих на входы блока 10 умножения с выходов сумматора 8 и блока 9 вычисления уставки напряжения тягового генератора, результат умножения нормируют и подают на вход блока 11 регулирования мощности тягового генератора, по полученному результату регулируют мощность тягового генератора.
Процесс разгона тепловоза с составом до заданной скорости движения иллюстрируется фиг. 3., когда рабочая точка перемещается из точки 0 (стоящий тепловоз), по кривой а из точки 0 в точку В (процесс трогания), затем переход на кривую в (характеристика постоянной мощности Ргз). В точке А на пересечении кривых 6 и в (фиг. 3) процесс разгона завершается, так как достигнуты все необходимые уставки по току Iгз, напряжению Uгз и мощности Ргз тягового генератора, и достигается равенство силы тяги Fт и сопротивления движению W (фиг. 2).
При изменении условий движения, например, уменьшении веса Q до величины Q1 при роспуске состава на горке, в блоке 4 оценки сопротивления движению осуществляют пересчет сопротивления движению W1 и соответственно потребной силы тяги FT1, далее в блоках 5-7 вычисляют все необходимые уставки по току Iгз1, напряжению Uгз1 и мощности Ρгз1 тягового генератора и производят регулирование тягового генератора на уменьшение мощности тягового генератора, при этом рабочая точка перемещается из точки А в точку А1 характеристики W1(v) на фиг. 2 и в точку А1 на кривой г (характеристики постоянной мощности Ρгз1) на фиг. 3.
Таким образом, заявленное изобретение позволит обеспечить повышение точности и быстродействия регулирования скорости движения с исключением колебательных процессов в энергетической установке тепловоза и может быть использовано на тепловозах и путевых машинах, где по роду деятельности требуется повышенная точность поддержания скорости движения, например при работе маневровых тепловозах на сортировочных горках.
Предлагаемый способ опробован на секции грузового тепловоза 2ТЭ116 и показал хорошие результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2016 |
|
RU2616111C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ЭЛЕКТРИЧЕСКОГО ТОРМОЗА | 2019 |
|
RU2709642C1 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2020 |
|
RU2750943C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2520837C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |
Изобретение относится к способам для управления тяговой системой транспортных средств с электротягой. Способ регулирования скорости заключается в том, что выделяют сигнал, пропорциональный скорости движения, сравнивают его с заданным значением и изменяют напряжение тягового генератора. Выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя. Интегрируют сигнал, пропорциональный величине разности сигналов, пропорциональных фактической и заданной скоростям движения, когда разность величин этих сигналов становится меньше заданной. Вычисляют сопротивление движению по заданным значениям веса тепловоза с составом и профиля участка. По значению сопротивления движению и характеристикам тягового электродвигателя определяют уставку требуемого значения тока тягового генератора по известной величине силы тяги тепловоза. Перемножают величину сигнала, пропорционального магнитному потоку электродвигателя, с величиной заданного значения скорости движения, полученный результат корректируют по величине падения напряжения на сопротивлении цепей электродвигателей и принимают за уставку напряжения тягового генератора. Величину уставки напряжения тягового генератора перемножают с уставкой тока, скорректированной по результату интегрирования разности величин сигналов, фактической и заданной скоростям движения, результат умножения принимают за уставку мощности тягового генератора. Техническим результатом изобретения является повышение точности и быстродействия регулирования скорости движения тепловоза. 3 ил.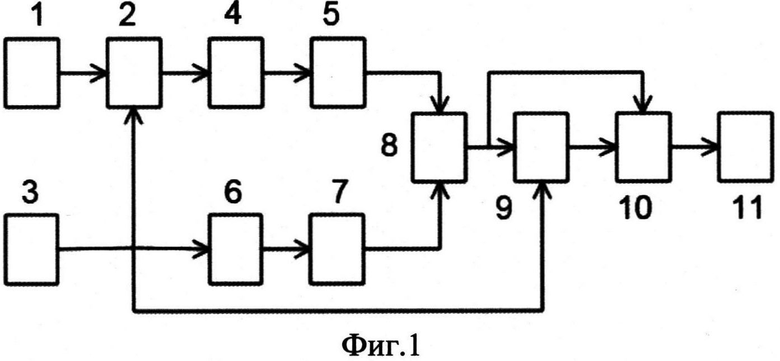
Способ регулирования скорости движения тепловоза с электрической передачей, заключающийся в том, что выделяют сигнал, пропорциональный скорости движения, сравнивают его с заданным значением и изменяют напряжение тягового генератора, выделяют сигнал, пропорциональный магнитному потоку тягового электродвигателя, фиксируют момент времени, когда разность величин сигналов, пропорциональных фактической и заданной скоростям движения, становится меньше наперед заданной величины, сигнал, пропорциональный величине этой разности, интегрируют, отличающийся тем, что вычисляют сопротивление движению по наперед заданным значениям веса тепловоза с составом и профиля участка движения, по вычисленному значению сопротивления движению и известным характеристикам тягового электродвигателя определяют уставку требуемого значения тока тягового генератора по известной величине силы тяги тепловоза, перемножают величину сигнала, пропорционального магнитному потоку тягового электродвигателя, с величиной заданного значения скорости движения, полученный результат нормируют, корректируют по величине падения напряжения на сопротивлении цепей тяговых электродвигателей, результат корректировки принимают за уставку напряжения тягового генератора, определяют уставку требуемой мощности тягового генератора, для чего величину уставки напряжения тягового генератора перемножают с уставкой тока тягового генератора, скорректированной по результату интегрирования разности величин сигналов, пропорциональных фактической и заданной скоростям движения, результат умножения нормируют и по полученному результату регулируют мощность тягового генератора.
| Способ регулирования скорости движения тепловоза с электрической передачей | 1984 |
|
SU1199676A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2012 |
|
RU2481202C1 |
| Устройство для автоматического регулирования скорости тепловоза с электрической передачей | 1980 |
|
SU1009831A1 |
| US 5998880 A, 07.12.1999 | |||
| US 4012677 A, 15.03.1977 | |||

