ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству управления тормозной силой для транспортного средства, применяемому к электромобилям и т.п., которое получает силу для содействия силе нажатия на педаль в соответствии с работой электроусилителя во время операции торможения.
УРОВЕНЬ ТЕХНИКИ
[0002] Известно традиционное устройство управления тормозной силой для транспортного средства, которое вычисляет целевую тормозную силу из давления в главном цилиндре и хода педали и изменяет степень вклада двух целевых тормозных сил согласно, по меньшей мере, или давлению в главном цилиндре, или ходу педали (см., например, патентную ссылку 1). При таком управлении тормозной силой, степень вклада целевой степени замедления, вычисленная из хода педали, увеличивается в области, в которой целевое значение торможения является низким. С другой стороны, степень вклада целевой степени замедления, вычисленная из давления в главном цилиндре, увеличивается в области, в которой целевое значение торможения является высоким.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
[0003] Патентный документ 1. Выложенная публикация патента (Япония) номер Н11-301434
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Известный электроусилитель применяется к рабочему механизму тормоза традиционного устройства, описанного выше, в качестве содействующего механизма, и сила нажатия педали и содействующая толкающая сила преобразуются в давление в главном цилиндре. В случае этого устройства управления тормозной силой, содержащего электроусилитель, степень вклада целевой степени замедления, которая вычисляется на основе хода педали, задается большой в области, в которой целевое значение торможения является низким. Следовательно, существуют проблемы неспособности достигать намеченной степени замедления относительно операции торможения, выполняемой за счет силы нажатия педали, и возникновения ощущения дискомфорта у водителя в ходе операции торможения во время низкого целевого значения торможения, которое зачастую используется водителем в нормальных режимах вождения.
[0005] А именно взаимосвязь между ходом поршня и давлением в главном цилиндре может принимать форму взаимосвязи, которая варьируется от расчетного среднего значения вследствие изменчивости. С другой стороны, электроусилитель не вводит силу нажатия педали непосредственно в поршень главного цилиндра, как и в случае усилителя на основе отрицательного давления, вводит силу нажатия педали в поршень главного цилиндра от входного стержня через пружины. Следовательно, когда ход поршня для формирования идентичной целевой степени замедления варьируется согласно изменчивости, также варьируется сила нажатия педали, определенная посредством силы реакции пружины. Следовательно, когда управление для формирования целевой степени замедления на основе хода педали выполняется в области, в которой целевое значение торможения является низким, сила нажатия педали для получения идентичной целевой степени замедления варьируется согласно изменчивости и вызывает ощущение дискомфорта у водителя в ходе операции торможения вследствие недостигаемой степени замедления, намеченной водителем, даже когда, например, выполняется операция торможения с использованием идентичной силы нажатия педали.
[0006] Настоящее изобретение осуществлено посредством фокусировки на проблемах, описанных выше, и задача заключается в том, чтобы предоставлять устройство управления тормозной силой транспортного средства, допускающее уменьшение возникновения варьирования целевого значения торможения при операции торможения с использованием идентичной силы нажатия во время низкого целевого значения торможения, которое зачастую используется водителем в нормальном режиме вождения, и недопущения возникновения ощущения дискомфорта у водителя в ходе операции торможения.
[0007] Для решения описанной выше задачи устройство управления тормозной силой для транспортного средства в настоящем изобретении содержит педаль тормоза, электроусилитель, главный цилиндр, средство детектирования силы нажатия педали, средство детектирования хода педали, средство вычисления первого целевого значения торможения, средство вычисления второго целевого значения торможения, средство задания степени вклада и средство вычисления целевого значения торможения.
Педаль тормоза прикладывает силу нажатия педали от водителя во время операции торможения.
Электроусилитель содействует силе нажатия на педаль за счет толкающей силы электрического приводного механизма.
Главный цилиндр вводит силу нажатия педали в поршень главного цилиндра от входного стержня через пружины, который прикладывает содействующую толкающую силу к силе нажатия педали в соответствии с работой электроусилителя, и формирует давление в главном цилиндре, которое подается в колесный тормозной цилиндр для каждого колеса.
Средство детектирования силы нажатия педали детектирует силу нажатия педали, прикладываемую к педали тормоза.
Средство детектирования хода педали детектирует ход педали для педали тормоза.
Средство вычисления первого целевого значения торможения вычисляет первое целевое значение торможения на основе силы нажатия педали.
Средство вычисления второго целевого значения торможения вычисляет второе целевое значение торможения на основе хода педали.
На основе силы, с которой водитель наступает на педаль, и/или хода педали средство задания степени вклада задает степень вклада первого целевого значения торможения так, что она превышает степень вклада второго целевого значения торможения, когда целевое значение торможения оценивается как низкое.
Средство вычисления целевого значения торможения вычисляет часть первого целевого значения торможения и часть второго целевого значения торможения согласно степени вклада, заданной посредством средства задания степени вклада, и получает конечное целевое значение торможения посредством суммирования части первого целевого значения торможения и части второго целевого значения торможения.
[0008] Соответственно во время операции торможения средство задания степени вклада задает степень вклада первого целевого значения торможения на основе силы нажатия педали так, что она превышает степень вклада второго целевого значения торможения на основе хода педали, когда целевое значение торможения оценивается как низкое. Затем часть первого целевого значения торможения и часть второго целевого значения торможения вычисляются согласно степени вклада, которая задана, и конечное целевое значение торможения получается посредством суммирования части первого целевого значения торможения и части второго целевого значения торможения в средстве вычисления целевого значения торможения.
А именно конечное целевое значение торможения вычисляется согласно степени вклада, смещенной к силе нажатия педали в момент, когда целевое значение торможения является низким; поэтому варьирование целевого значения торможения относительно операции торможения с использованием идентичной силы нажатия педали снижается, как в случае, когда конечное целевое значение торможения вычисляется согласно степени вклада, смещенной к ходу педали.
Как результат, варьирование целевого значения торможения относительно операции торможения с использованием идентичной силы нажатия педали может быть уменьшено во время низкого целевого значения торможения, которое зачастую используется водителем в нормальном режиме вождения, и может не допускаться возникновение ощущения дискомфорта у водителя в ходе операции торможения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Фиг. 1 является общей конфигурацией системы, иллюстрирующей общую конфигурацию устройства управления тормозной силой для транспортного средства в первом варианте осуществления.
Фиг. 2 является блок-схемой управления, иллюстрирующей тормозной контроллер в устройстве управления тормозной силой для транспортного средства в первом варианте осуществления.
Фиг. 3 является характеристической диаграммой, иллюстрирующей, что взаимосвязь давления в главном цилиндре относительно хода поршня является переменной в тормозном устройстве для транспортного средства.
Фиг. 4 является характеристической диаграммой, иллюстрирующей взаимосвязь целевой тормозной силы относительно силы нажатия педали в случае, если взаимосвязь давления в главном цилиндре относительно хода поршня является переменной.
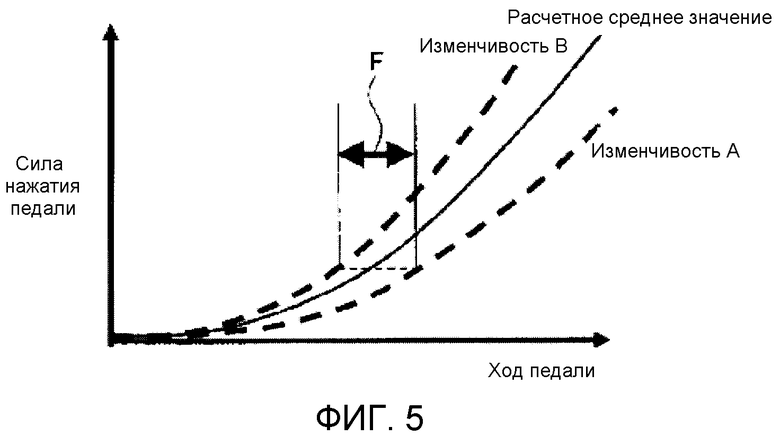
Фиг. 5 является характеристической диаграммой, иллюстрирующей взаимосвязь силы нажатия педали относительно хода педали в случае, если взаимосвязь давления в главном цилиндре относительно хода поршня является переменной.
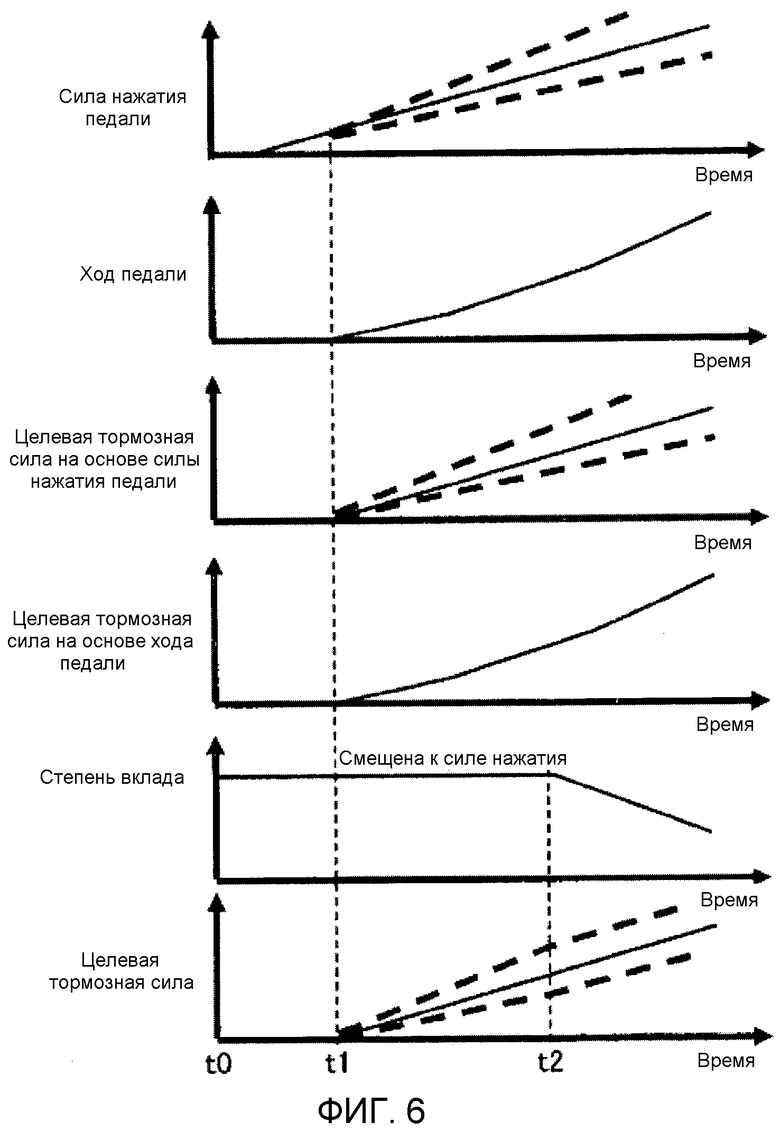
Фиг. 6 является временной диаграммой, иллюстрирующей характеристики силы нажатия педали во время операции торможения, хода педали, целевой тормозной силы на основе силы нажатия педали, целевой тормозной силы на основе хода педали, степени вклада и целевой тормозной силы в электромобиле с установленным устройством управления тормозной силой для транспортного средства в первом варианте осуществления.
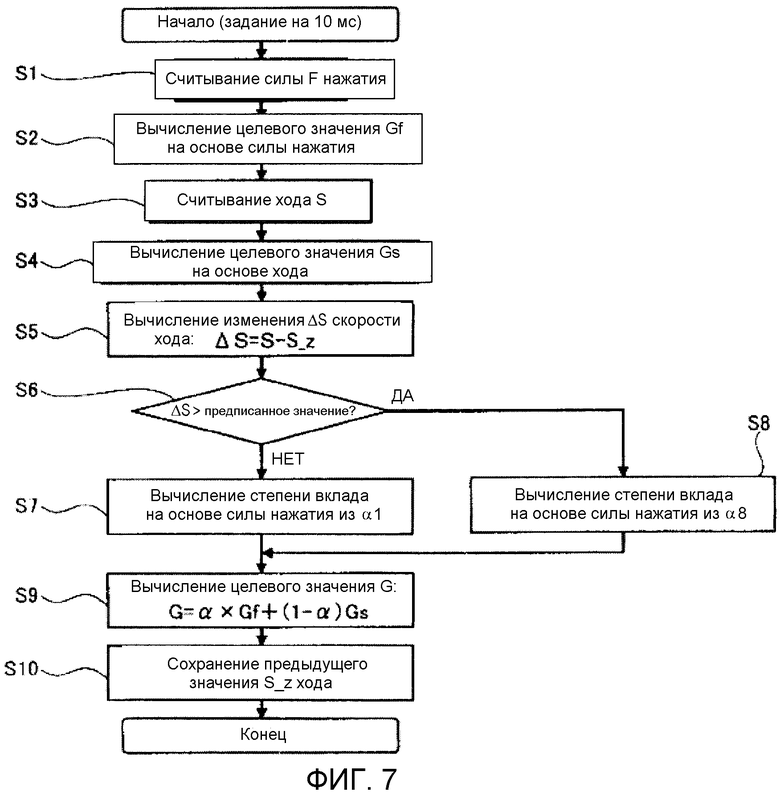
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей конфигурацию и последовательность операций обработки управления тормозной силой, выполняемой в тормозном контроллере устройства управления тормозной силой для транспортного средства во втором варианте осуществления.
Фиг. 8 является характеристической диаграммой степени вклада, иллюстрирующей характеристику первой степени вклада и характеристику второй степени вклада, которые основаны на силе нажатия в обработке управления тормозной силой в устройстве управления тормозной силой для транспортного средства во втором варианте осуществления.
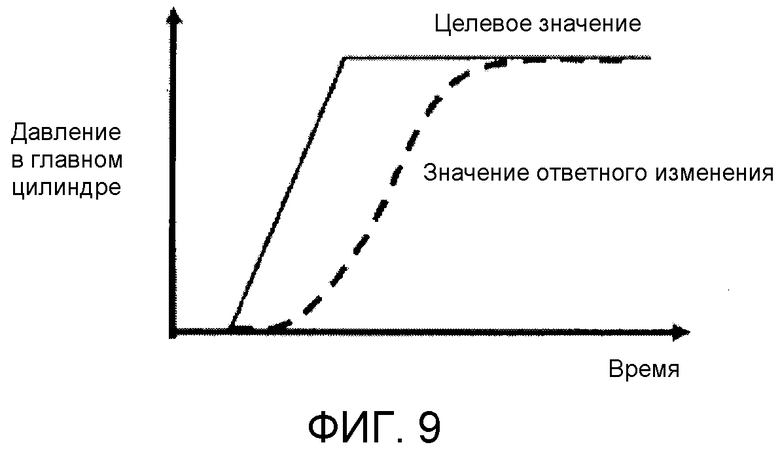
Фиг. 9 является диаграммой передаточной характеристики по давлению в главном цилиндре, иллюстрирующей изменение во времени целевого значения и значения изменения давления в главном цилиндре в устройстве управления тормозной силой для транспортного средства во втором варианте осуществления.
Фиг. 10 является характеристической диаграммой, иллюстрирующей другую взаимосвязь силы нажатия относительно хода педали в случае, если скорость приведения в действие тормоза варьируется в устройстве управления тормозной силой для транспортного средства во втором варианте осуществления.
Фиг. 11 является характеристической диаграммой, иллюстрирующей другие взаимосвязи целевой тормозной силы относительно хода педали, когда взаимосвязь основана на ходе педали, когда взаимосвязь основана на силе нажатия, когда степень вклада смещается к ходу во время быстрого нажатия, и когда степень вклада не изменяется во время быстрого нажатия.
Фиг. 12 является блок-схемой управления, иллюстрирующей конфигурацию основной секции тормозного контроллера в примере, в котором целевое тормозное значение представляет собой позицию поршня вместо целевой тормозной силы.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010] Ниже поясняются наилучшие режимы для реализации устройства управления тормозной силой для транспортного средства в настоящем изобретении на основе первого варианта осуществления и второго варианта осуществления.
Первый вариант осуществления
[0011] Во-первых, поясняется конфигурация первого варианта осуществления.
Фиг. 1 является общей конфигурацией системы, иллюстрирующей общую конфигурацию устройства управления тормозной силой для транспортного средства в первом варианте осуществления. Ниже поясняется общая конфигурация на основе Фиг. 1. Устройство управления тормозной силой для транспортного средства в первом варианте осуществления и втором варианте осуществления применяется к электромобилю, такому как автомобиль с электроприводом, гибридный автомобиль и т.п.
[0012] Устройство управления тормозной силой для транспортного средства в первом варианте осуществления содержит педаль 1 тормоза, электроусилитель 2, главный цилиндр 3, приводной механизм 4 гидравлического тормоза, колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR, тормозной контроллер 6 и схему 7 возбуждения электродвигателя, как проиллюстрировано на Фиг. 1.
[0013] Во время операции торможения водитель прикладывает силу нажатия педали к педали 1 тормоза. Верхняя концевая секция этой педали 1 тормоза поддерживается с возможностью поворота на кузове автомобиля, и средняя секция педали 1 тормоза соединяется с входным стержнем 9 через штифт 8 с головкой и отверстием под шплинт.
[0014] Электроусилитель 2 содействует силе нажатия педали за счет толкающей силы электродвигателя 10 (электрического приводного механизма). Этот электроусилитель 2 преобразует крутящий момент электродвигателя от электродвигателя 10 в содействующую толкающую силу с помощью болта с двойной нарезкой и т.п. и заставляет содействующую толкающую силу действовать на первичный поршень 11 (поршень главного цилиндра). Электроусилитель 2 крепится на переднем щите 12 вместе с главным цилиндром 3.
[0015] Главный цилиндр 3 прикладывает содействующую толкающую силу посредством электродвигателя 10 к силе нажатия педали и формирует давление в главном цилиндре (первичное давление и вторичное давление), которое направляется в колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR, предоставляемые для каждого колеса. Этот главный цилиндр 3 имеет первичный поршень 11, который вводит силу нажатия педали, прикладываемую к входному стержню 9 через пару пружин 13 и 13, и вторичный поршень 14, неразъемно соединенный с первичным поршнем 11. Затем первичное давление, созданное согласно ходу поршня первичного поршня 11, направляется в приводной механизм 4 гидравлического тормоза через первичную трубку 15 высокого давления. Вторичное давление, созданное согласно ходу поршня вторичного поршня 14, направляется в приводной механизм 4 гидравлического тормоза через вторичную трубку 16 высокого давления.
[0016] Приводной механизм 4 гидравлического тормоза направляет давление в главном цилиндре, которое направлено через первичную трубку 15 высокого давления и вторичную трубку 16 высокого давления во время обычной операции торможения, в колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR. Когда ABS-управление сопутствует операции торможения, давление масла, при котором давление в главном цилиндре снижается/поддерживается/повышается, направляется в колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR. Кроме того, когда VDC-управление или TCS-управление не сопутствует операции торможения, управляющее давление масла на основе давления насоса от электронасоса направляется в тот колесный тормозной цилиндр, который требует управляющей силы, из колесных тормозных цилиндров 5 FL, 5 FR, 5 RL и 5 RR.
[0017] Колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR предоставляются в позиции тормозного устройства каждого колеса и предоставляют управляющую силу для каждого колеса согласно давлению в колесном тормозном цилиндре, которое направляется через трубки 17 FL, 17 FR, 17 RL и 17 RR высокого давления колесных тормозных цилиндров.
[0018] Тормозной контроллер 6 определяет целевую тормозную силу на основе силы нажатия педали и хода педали во время операции торможения и выводит сигнал возбуждения электродвигателя в схему 7 возбуждения электродвигателя так, что получается содействующая толкающая сила, которая достигает целевой тормозной силы. В этот тормозной контроллер 6 вводится информация детектирования из датчика 18 хода педали (средства детектирования хода педали), который детектирует ход педали тормоза, датчика 19 давления в главном цилиндре, кругового датчика 20 позиции электродвигателя и другого типа сенсорного переключателя 21.
[0019] Схема 7 возбуждения электродвигателя преобразует ток питания (напряжение питания) аккумулятора 22 в ток возбуждения (напряжение возбуждения), которое должно подаваться в электродвигатель 10 согласно сигналам возбуждения электродвигателя из тормозного контроллера 6.
[0020] Фиг. 2 является блок-схемой управления, иллюстрирующей конфигурацию основной секции тормозного контроллера 6 в устройстве управления тормозной силой для транспортного средства в первом варианте осуществления. Ниже поясняется конфигурация основной секции на основе Фиг. 2.
[0021] Тормозной контроллер 6 содержит модуль 60 вычисления силы нажатия педали (средство детектирования силы нажатия педали), модуль 61 вычисления первой целевой тормозной силы (средство вычисления первой целевой тормозной силы), модуль 62 вычисления второй целевой тормозной силы (средство вычисления второй целевой тормозной силы), модуль 63 задания степени вклада (средство задания степени вклада), модуль 64 вычисления степени вклада первой целевой тормозной силы, модуль 65 вычисления части первой целевой тормозной силы, модуль 66 вычисления части второй целевой тормозной силы и модуль 67 вычисления целевой тормозной силы (средство вычисления целевого значения торможения), как проиллюстрировано на Фиг. 2.
[0022] Модуль 60 вычисления силы нажатия педали вычисляет силу нажатия педали, прикладываемую к педали 1 тормоза, посредством использования нижеприведенного уравнения:
ввод от входного стержня (Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины×скорость (ΔΧ) относительного смещения входного стержня и поршня главного цилиндра с вводом от входного стержня (Fi) в качестве силы нажатия педали.
Здесь жесткость (К) пружины согласно площади (Ai) входного стержня входного стержня 9 и паре пружин 13 и 13 является известным фиксированным значением. Давление (Pb) в главном цилиндре получается из датчика 19 давления в главном цилиндре. Что касается относительного смещения (ΔΧ), информация положения входного стержня получается из датчика 18 хода педали, а информация положения поршня главного цилиндра оценивается из положения вращения электродвигателя, полученной из датчика 20 кругового положения электродвигателя. Разность между положением входного стержня и положением главного цилиндра считается относительным смещением (ΔΧ).
[0023] Модуль 61 вычисления первой целевой тормозной силы вводит силу нажатия педали из модуля 60 вычисления силы нажатия педали и вычисляет часть первой целевой тормозной силы на основе силы нажатия педали посредством использования характеристик пропорциональной взаимосвязи целевой тормозной силы относительно силы нажатия педали, как указано внутри рамки.
[0024] Модуль 62 вычисления второй целевой тормозной силы вводит ход педали из датчика 18 хода педали и вычисляет часть второй целевой тормозной силы на основе хода педали посредством использования характеристик на кривой части целевой тормозной силы относительно хода педали, как указано внутри рамки.
[0025] Модуль 63 задания степени вклада вводит силу нажатия педали из модуля 60 вычисления силы нажатия педали и задает степень вклада β (=усиление) второй целевой тормозной силы на основе хода педали на основе силы нажатия педали (целевого значения торможения) посредством использования характеристик степени вклада относительно силы нажатия педали, как указано внутри рамки. Характеристика степени вклада задает степень вклада β равной небольшому фиксированному значению в области низкого целевого значения торможения, в которой сила F нажатия педали составляет 0-F1. В области высокого целевого значения торможения, в которой сила F нажатия педали составляет F2~, степень вклада β задается равной большому фиксированному значению. В области среднего целевого значения торможения, в которой сила F нажатия педали составляет F1-F2, степень вклада β задается равной значению, которое постепенно изменяется от небольшого фиксированного значения до большого фиксированного значения.
[0026] Модуль 64 вычисления степени вклада первой целевой тормозной силы вычисляет степень вклада первой целевой тормозной силы на основе силы нажатия педали согласно уравнению (1-β). А именно в области низкого целевого значения торможения степень вклада первой целевой тормозной силы на основе силы нажатия педали задается так, что она превышает степень вклада второй целевой тормозной силы на основе хода педали.
[0027] Модуль 65 вычисления части первой целевой тормозной силы вычисляет часть первой целевой тормозной силы на основе силы нажатия педали посредством умножения первой целевой тормозной силы на основе силы нажатия педали, полученной из модуля 61 вычисления первой целевой тормозной силы, и степени вклада (1-β) первой целевой тормозной силы на основе силы нажатия педали, полученной из модуля 64 вычисления степени вклада первой целевой тормозной силы.
[0028] Модуль 66 вычисления части второй целевой тормозной силы вычисляет часть второй целевой тормозной силы на основе хода педали посредством умножения второй целевой тормозной силы на основе хода педали, полученной из модуля 62 вычисления второй целевой тормозной силы, и степени вклада β второй целевой тормозной силы на основе хода педали, полученной из модуля 63 задания степени вклада.
[0029] Модуль 67 вычисления целевой тормозной силы вычисляет конечную целевую тормозную силу посредством суммирования части первой целевой тормозной силы на основе силы нажатия педали, полученной из модуля вычисления части первой целевой тормозной силы 65, и части второй целевой тормозной силы на основе хода педали, полученной из модуля 66 вычисления части второй целевой тормозной силы.
[0030] Далее поясняется работа.
Во-первых, поясняются ″проблемы управления тормозной силой в сравнительных примерах″. Далее поясняются операции в устройстве управления тормозной силой для транспортного средства в первом варианте осуществления посредством разделения пояснения на пояснение ″арифметической операции для вычисления целевой тормозной силы″ и пояснение ″операции управления тормозной силой″.
[0031] Проблемы управления тормозной силой в сравнительных примерах
Технология, раскрытая в выложенной публикации патента (Япония) № Н11-301434, рассматривается как сравнительный пример 1, а технология, раскрытая в выложенной публикации патента (Япония) №2007-112426, рассматривается как сравнительный пример 2.
[0032] Сравнительный пример 1 вычисляет целевую тормозную силу из давления в главном цилиндре и хода педали, которые являются вводами от водителя, и изменяет степень вклада двух целевых тормозных сил согласно, по меньшей мере, либо давлению в главном цилиндре, либо ходу педали. В области, в которой целевая тормозная сила является низкой, степень вклада целевой степени замедления, вычисленная из хода педали, задается большой. С другой стороны, в области, в которой целевая тормозная сила является высокой, степень вклада целевой степени замедления, вычисленная из давления в главном цилиндре, задается большой.
[0033] Сравнительный пример 2 представляет собой рабочий механизм тормоза, который использует электроусилитель в качестве содействующего механизма, приводит в действие поршень главного цилиндра вперед в соответствии с работой электроусилителя и формирует давление в главном цилиндре. Этот электроусилитель выполнен с возможностью вводить силу нажатия педали в поршень главного цилиндра от входного стержня через пружины и вводить содействующую толкающую силу в поршень главного цилиндра. В этой связи вакуумный усилитель, известный как содействующий механизм, выполнен с возможностью непосредственно вводить силу нажатия педали и содействующую толкающую силу в поршень главного цилиндра от входного стержня.
[0034] Во-первых, взаимосвязь между величиной движения (ходом поршня) и давлением в главном цилиндре поршня главного цилиндра может принимать форму взаимосвязи, которая варьируется от расчетного среднего значения вследствие присутствия изменчивости в компонентах, присутствия смеси воздуха, присутствия проседания суппорта тормоза и т.п., как проиллюстрировано на Фиг. 3. А именно формируется ″изменчивость А″, при которой давление в главном цилиндре относительно хода поршня задано выше расчетного среднего значения, и ″изменчивость В″, при которой давление в главном цилиндре относительно хода поршня задано ниже расчетного среднего значения. Следовательно, варьирование хода поршня необходимо для того, чтобы формировать идентичное давление в главном цилиндре, как проиллюстрировано с помощью диапазона С изменчивости на Фиг. 3.
[0035] Следовательно, в случае, если сравнительный пример 1 применяется к сравнительному примеру 2, целевая тормозная сила на основе хода педали, главным образом, формируется в области, в которой целевая тормозная сила является низкой. Как результат, требуемое давление в главном цилиндре может быть получено посредством задания хода поршня коротким во время ″изменчивости А″ и задания хода поршня длинным во время ″изменчивости В″.
[0036] Тем не менее электроусилитель в сравнительном примере 2 выполнен с возможностью вводить силу нажатия педали в поршень главного цилиндра от входного стержня через пружины. Следовательно, существует следующая взаимосвязь: ввод от входного стержня (Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины×относительное смещение (ΔΧ) входного стержня и поршня главного цилиндра.
В этой связи уравнение для получения ввода от входного стержня является преобразованием уравнения равновесия давления (1) в сводке сравнительного примера 2. В этом уравнении ″ввод от входного стержня (Fi)″ соответствует силе нажатия педали водителем. ″Давление (Pb) в главном цилиндре×площадь (Ai) входного стержня″ соответствует гидравлической силе реакции. ″Жесткость (К) пружины×относительное смещение (ΔΧ)″ соответствует силе реакции пружины.
[0037] Следовательно, когда сравнительный пример 1 применяется к сравнительному примеру 2, и формируется целевая тормозная сила на основе хода педали, взаимосвязь силы нажатия педали относительно целевой тормозной силы может варьироваться между случаями ″среднего значения″, случаем ″изменчивости А″ и случаем ″изменчивости В″.
Например, во время ″изменчивости А″ число ходов, которое делает поршень для вывода идентичного давления в главном цилиндре (целевой тормозной силы), является небольшим; следовательно, сила реакции пружины увеличивается, и ввод от входного стержня (сила нажатия педали) увеличивается на величину увеличения силы реакции пружины, как проиллюстрировано на Фиг. 3. А именно во время ″изменчивости А″ сила нажатия педали для вывода идентичной целевой тормозной силы становится больше, чем во время ″среднего значения″, как проиллюстрировано с помощью D на Фиг. 4. С другой стороны, во время ″изменчивости В″ число ходов, которое делает поршень для вывода идентичного давления в главном цилиндре (целевой тормозной силы), является большим; следовательно, ввод от входного стержня (сила нажатия педали) снижается на величину снижения силы реакции пружины, как проиллюстрировано на Фиг. 3. А именно во время ″изменчивости В″ сила нажатия педали для вывода идентичной целевой тормозной силы снижается больше, чем во время ″среднего значения″, как проиллюстрировано с помощью Ε на Фиг. 4.
[0038] В частности, в случае электроусилителя относительное смещение (ΔΧ) входного стержня и поршня главного цилиндра варьируется, когда варьируется ход поршня. Следовательно, ход педали для вывода идентичной силы нажатия педали варьируется, как проиллюстрировано с помощью диапазона F изменчивости на Фиг. 5.
[0039] Как результат, когда управление выполняется для того, чтобы формировать целевую тормозную силу на основе хода педали, взаимосвязь между силой нажатия педали, прикладываемой водителем, и давлением в главном цилиндре, другими словами, взаимосвязь между силой нажатия педали, прикладываемой водителем, и целевой тормозной силой варьируется согласно изменчивости (Фиг. 4). Следовательно, даже если, например, операция торможения выполняется с использованием идентичной силы нажатия педали, степень замедления, намеченная водителем, не получается, и у водителя в ходе операции торможения возникает ощущение дискомфорта.
[0040] Арифметическая операция для вычисления целевой тормозной силы
Прежде всего, в модуле 63 задания степени вклада сила нажатия педали вводится из модуля 60 вычисления силы нажатия педали, и степень вклада β (=усиление) второй целевой тормозной силы на основе хода педали задается на основе силы нажатия педали посредством использования характеристики степени вклада относительно силы нажатия педали, как указано внутри рамки.
[0041] Фиксированное значение небольшой степени вклада β задается в области низкого целевого значения торможения, в которой сила F нажатия педали составляет 0-F1. Затем степень вклада (1-β) первой целевой тормозной силы на основе силы нажатия педали вычисляется в модуле вычисления соотношения вклада первой целевой тормозной силы 64, и часть первого целевого значения торможения вычисляется в модуле 65 вычисления части первой целевой тормозной силы посредством умножения (1-β) и первой целевой тормозной силы на основе силы нажатия педали. С другой стороны, часть второго целевого значения торможения вычисляется в модуле 66 вычисления части второй целевой тормозной силы посредством умножения степени вклада β второй целевой тормозной силы на основе хода педали и второй целевой тормозной силы на основе хода педали. Затем конечная целевая тормозная сила вычисляется в модуле 67 вычисления целевой тормозной силы посредством суммирования части первой целевой тормозной силы и части второй целевой тормозной силы. Следовательно, конечная целевая тормозная сила в области низкого целевого значения торможения является такой, что степень вклада (1-β) первой целевой тормозной силы на основе силы нажатия педали имеет большее значение, чем степень вклада β второй целевой тормозной силы на основе хода педали.
[0042] В области среднего целевого значения торможения, в которой сила F нажатия педали составляет F1-F2, степень вклада β задается равной значению, которое постепенно изменяется от небольшого фиксированного значения до большого фиксированного значения. Следовательно, конечная целевая тормозная сила в области среднего целевого значения торможения является такой, что степень вклада (1-β) первой целевой тормозной силы на основе силы нажатия педали постепенно изменяется от большого значения до небольшого значения. Напротив, степень вклада β второй целевой тормозной силы на основе хода педали постепенно изменяется от небольшого значения до большого значения.
[0043] В области высокого целевого значения торможения, в которой сила F нажатия педали составляет F2~, степень вклада β задается равной большому фиксированному значению. Следовательно, конечная целевая тормозная сила в области высокого целевого значения торможения является такой, что степень вклада β второй целевой тормозной силы на основе хода педали имеет значение, большее чем степень вклада (1-β) первой целевой тормозной силы на основе силы нажатия педали.
[0044] А именно в первом варианте осуществления используется конфигурация, в которой степень вклада первой целевой тормозной силы на основе силы нажатия педали задается так, что она превышает степень вклада второй целевой тормозной силы на основе хода педали во время операции торможения. Следовательно, варьирование целевой тормозной силы относительно операции торможения с использованием идентичной силы нажатия педали, как и в случае вычисления конечной целевой тормозной силы согласно степени вклада, смещенной к ходу педали, снижается посредством конечной целевой тормозной силы, вычисляемой согласно степени вклада, смещенной к силе нажатия педали во время низкой силы нажатия педали.
Следовательно, варьирование целевой тормозной силы относительно операции торможения с использованием идентичной силы нажатия педали снижается во время низкого целевого значения торможения, используемого зачастую водителем в нормальном режиме вождения, и не допускается возникновение ощущения дискомфорта у водителя в ходе операции торможения.
[0045] Операция управления тормозной силой
Операция управления тормозной силой в случае, если операция торможения выполняется в транспортном средстве, которое использует управление тормозной силой, которое выполняет арифметический расчет целевой тормозной силы, поясняется на основе временной диаграммы, проиллюстрированной на Фиг. 6.
[0046] Когда операция торможения начинается во время t0, характеристика силы нажатия педали указывает характеристику возрастания пропорционально по прямой линии с течением времени. В этой характеристике силы нажатия педали характеристика в виде сплошной линии представляет собой среднее значение, характеристика в виде верхней пунктирной линии представляет собой случай изменчивости В, и характеристика в виде нижней пунктирной линии представляет собой случай изменчивости А.
[0047] Когда операция торможения начинается во время t0, характеристика хода педали указывает характеристику, которая возрастает по кривой Ν-ного порядка с течением времени.
[0048] Целевая тормозная сила на основе силы нажатия педали указывает характеристику, которая возрастает пропорционально по прямой линии с течением времени от времени t1. В этой характеристике целевой тормозной силы на основе силы нажатия педали характеристика в виде сплошной линии представляет собой среднее значение, характеристика в виде верхней пунктирной линии представляет собой случай изменчивости В, и характеристика в виде нижней пунктирной линии представляет собой случай изменчивости А.
[0049] Целевая тормозная сила на основе хода педали указывает характеристику возрастания по кривой Ν-ного порядка с течением времени от времени t1.
[0050] В случае первого варианта осуществления степень вклада предоставляется посредством смещения к силе нажатия педали во время области низкого целевого значения торможения от времени t0 до времени t2, и степень вклада силы нажатия педали предоставляется согласно характеристике, при которой степень вклада силы нажатия педали снижается со времени t2.
[0051] Следовательно, взаимосвязь между силой нажатия педали и целевой тормозной силой поддерживается таким образом, что оно соответствует характеристике целевой тормозной силы на основе силы нажатия педали, которая определена согласно изменчивости, и варьирование целевой тормозной силы относительно операции торможения с использованием идентичной силы нажатия педали снижается вследствие предоставления целевой тормозной силы посредством смещения к силе нажатия педали от времени t1 до времени t2. Кроме того, период между временем t1 и временем t2 зачастую является периодом низкого целевого значения торможения, которое используется водителем в нормальном режиме вождения. Следовательно, может эффективно проявляться преимущество недопущения возникновения ощущения дискомфорта у водителя в ходе операции торможения.
[0052] Далее поясняются преимущества.
Преимущества, перечисленные ниже, могут быть получены в устройстве управления тормозной силой для транспортного средства в первом варианте осуществления.
[0053] (1) Устройство управления тормозной силой для транспортного средства в первом варианте осуществления включает в себя педаль 1 тормоза, которая прикладывает силу F нажатия педали от водителя во время операции торможения,
- электроусилитель 2, который содействует F силе нажатия педали за счет толкающей силы электрического приводного механизма (электродвигателя 10),
- главный цилиндр 3, который вводит силу F нажатия педали в поршень главного цилиндра (первичный поршень 11) от входного стержня 9 через пружины 13 и 13, прикладывает содействующую толкающую силу к силе F нажатия педали в соответствии с работой электроусилителя 2 и формирует давление в главном цилиндре, которое направляется в колесные тормозные цилиндры 5 FL, 5 FR, 5 RL и 5 RR, предоставляемые для каждого колеса,
- модуль 60 вычисления силы нажатия педали (средство определения силы нажатия педали), который определяет силу F нажатия педали, прикладываемую к педали 1 тормоза,
- средство детектирования хода педали (датчик 18 хода педали), которое детектирует ход педали, применяемый к педали 1 тормоза,
- средство вычисления первого целевого значения торможения (модуль 61 вычисления первого целевого значения торможения), которое вычисляет первую целевую тормозную силу (первое целевое значение торможения) на основе силы F нажатия педали,
- средство вычисления второго целевого значения торможения (модуль 62 вычисления второй целевой тормозной силы), которое вычисляет второе целевое значение торможения (вторую целевую тормозную силу) на основе хода педали,
- средство задания степени вклада (модуль 63 задания степени вклада), которое задает степень вклада (1-β) первого целевого значения торможения (первую целевую тормозную силу) так, что она превышает степень вклада β второго целевого значения торможения (вторую целевую тормозную силу), когда целевое значение торможения (целевая тормозная сила) оценивается как низкое, и
- средство вычисления целевого значения торможения (модуль 67 вычисления целевой тормозной силы), которое вычисляет часть первого целевого значения торможения (часть первой целевой тормозной силы) и часть второго целевого значения торможения (часть второй целевой тормозной силы) согласно степени вклада (1-β); β задается согласно средству задания степени вклада (модулю 63 задания степени вклада), и получает конечное целевое значение торможения (целевую тормозную силу) посредством суммирования части первого целевого значения торможения (части первой целевой тормозной силы) и части второго целевого значения торможения (части второй целевой тормозной силы).
Следовательно, варьирование целевого значения торможения (целевой тормозной силы) относительно операции торможения с использованием идентичной силы нажатия педали снижается во время низкого целевого значения торможения (целевой тормозной силы), используемого зачастую водителем в нормальном режиме вождения, и может не допускаться возникновение ощущения дискомфорта у водителя в ходе операции торможения.
[0054] (2) Средство детектирования силы нажатия педали (модуль 60 вычисления силы нажатия педали) вычисляет ввод от входного стержня (Fi) в качестве силы F нажатия педали посредством использования следующего уравнения.
ввод от входного стержня (Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины×относительное смещение (ΔΧ) входного стержня и поршня главного цилиндра.
Следовательно, в дополнение к преимуществам в (1), информация силы нажатия педали может быть получена при недопущении повышения затрат вследствие добавления датчиков за счет использования информации из существующих датчиков.
Второй вариант осуществления
[0055] Второй вариант осуществления является примером, который изменяет степень вклада на основе силы нажатия педали в момент, когда скорость приведения в действие тормоза является высокой.
[0056] Во-первых, поясняется конфигурация.
Общая конфигурация во втором варианте осуществления является идентичной конфигурации на Фиг. 1 по первому варианту осуществления. Следовательно, иллюстрация с помощью чертежа опускается. Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей конфигурацию и последовательность операций обработки управления тормозной силой, выполняемой в тормозном контроллере 6 устройства управления тормозной силой для транспортного средства во втором варианте осуществления. Ниже поясняется каждый этап на Фиг. 7. Эта операция выполняется согласно циклу активации, например, в 10 мс.
[0057] На этапе S1 считывается сила F нажатия педали, и процесс переходит к этапу S2. Эта сила F нажатия педали получается согласно вычислению из отдельной блок-схемы последовательности операций способа, как и в случае первого варианта осуществления.
[0058] На этапе S2 целевое значение Gf на основе силы F нажатия педали вычисляется после считывания силы F нажатия педали на этапе S1, и процесс переходит к этапу S3 (средство вычисления первого целевого значения торможения).
Это целевое значение Gf на основе силы F нажатия педали вычисляется идентично модулю 61 вычисления первой целевой тормозной силы в первом варианте осуществления.
[0059] На этапе S3 ход S педали считывается после вычисления целевого значения Gf на основе силы F нажатия педали на этапе S2, и процесс переходит к этапу S4.
Этот ход S педали получается согласно сигналам датчиков из датчика 18 хода педали, аналогично первому варианту осуществления.
[0060] На этапе S4 целевое значение Gs на основе хода S педали вычисляется после считывания хода S педали на этапе S3, и процесс переходит к этапу S5 (средство вычисления второго целевого значения торможения).
Это целевое значение Gs на основе хода S педали вычисляется идентично модулю 62 вычисления второй целевой тормозной силы в первом варианте осуществления.
[0061] На этапе S5 изменение ΔS скорости хода вычисляется после вычисления целевого значения Gs на основе хода S педали на этапе S4, и процесс переходит к этапу S6 (средство вычисления скорости приведения в действие тормоза).
Здесь, изменение ΔS скорости хода получается с помощью следующего уравнения: ΔS=S-S_z,
S: текущее значение хода педали, S_z: предыдущее значение хода педали.
[0062] На этапе S6, выполняется определение в отношении того, превышает или нет изменение ΔS скорости хода предписанное значение после вычисления изменения ΔS скорости хода на этапе S5. Если результатом определения является ″Да″ (ΔS> предписанное значение), процесс переходит к этапу S8; если результатом определения является ″Нет″ (ΔS< предписанное значение), процесс переходит к этапу S7 (средство задания степени вклада).
Здесь, предписанное значение предоставляется в качестве порогового значения для выполнения определения касательно того, является или нет операция торможения быстрой операцией нажатия.
[0063] На этапе S7 степень вклада α на основе силы нажатия педали вычисляется из первой характеристики α1 степени вклада, проиллюстрированной на Фиг. 8, после того, как определение того, что ΔS меньше или равно предписанному значению, выполняется на этапе S6, и процесс переходит к этапу S9 (средство задания степени вклада).
Здесь, характеристика α1 первой степени вклада, которая выбирается, когда ΔS меньше или равно предписанному значению, является характеристикой, которая задает степень вклада целевого значения Gf на основе силы F нажатия педали так, что она превышает степень вклада целевого значения Gs на основе хода S педали на стороне, на которой сила нажатия педали является низкой, как проиллюстрировано на Фиг. 8. А именно характеристика задается так, что она является идентичной характеристике модуля 63 задания степени вклада в первом варианте осуществления.
[0064] На этапе S8 степень вклада α на основе силы нажатия педали вычисляется из характеристики α2 второй степени вклада, проиллюстрированной на Фиг. 8, после выполнения определения того, что ΔS превышает предписанное значение, на этапе S6, и процесс переходит к этапу S9 (средство задания степени вклада).
Здесь, характеристика α2 второй степени вклада, которая выбирается, когда ΔS превышает предписанное значение, является характеристикой, которая задает степень вклада целевого значения Gs на основе хода S педали так, что она превышает характеристику α1 первой степени вклада. А именно характеристика задается так, что степень вклада α на основе силы нажатия педали управляется раньше характеристики α1 первой степени вклада относительно увеличения силы нажатия педали.
[0065] На этапе S9 целевое значение G вычисляется на основе степени вклада α на основе силы нажатия педали, целевого значения Gf на основе силы F нажатия педали и целевого значения Gs на основе хода S педали после вычисления степени вклада α на основе силы нажатия педали на этапе S7 или этапе S8, и процесс переходит к этапу S10 (средство вычисления целевого значения торможения).
Целевое значение G вычисляется согласно следующему уравнению:
G=α×Gf+(1-α)Gs.
[0066] На этапе S10 ход S педали, который считан в этот раз, сохраняется в качестве предыдущего значения хода S_z после вычисления целевого значения G на этапе S9, процесс завершается.
[0067] Далее поясняется работа.
В случае если водитель быстро предписывает операцию педали тормоза на стороне увеличения (стороне нажатия), увеличение давления в главном цилиндре задерживается согласно задержке в отклике тормозной системы.
Помимо этого электроусилитель 2 выполнен с возможностью вводить силу нажатия педали в первичный поршень 11 от входного стержня 9 через пружины 13 и 13. Следовательно, существует следующая взаимосвязь: ввод от входного стержня (Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины для пружин 13 и 13×относительное смещение (ΔΧ) входного стержня 9 и первичного поршня 11.
Следовательно, увеличение ввода от входного стержня (Fi) задерживается.
А именно характеристика давления в главном цилиндре является такой, что задержка ответного изменения формируется, когда сила нажатия педали является высокой, как очевидно из значения ответного изменения, указываемого с помощью характеристики в форме пунктирной линии, и целевого значения, указываемого с помощью характеристики в форме сплошной линии на Фиг. 9. Как результат задержки в ответном изменении давления в главном цилиндре, в результате получается больший ход при небольшой силе нажатия педали, когда педаль нажимается быстро (характеристика в форме пунктирной линии на Фиг. 10) по сравнению с тем, когда педаль нажимается медленно (характеристика в форме сплошной линии на Фиг. 10).
Соответственно формируется задержка относительно быстрого нажатия тормоза водителя (внезапного торможения и т.п.) как результат задержки увеличения целевого значения на основе силы нажатия педали, и существует проблема возникновения ощущения неудовлетворенности у водителя.
[0068] Напротив, во втором варианте осуществления степень вклада (1-α) целевого значения Gs на основе хода педали задается так, что она тем больше, чем быстрее выполняется операция нажатия педали тормоза на стороне увеличения. Следовательно, целевое значение G может быть надлежащим образом увеличено относительно операции быстрого нажатия педали.
[0069] А именно, во время операции быстрого нажатия педали повторяется последовательность операций, которая проходит в порядке ″этап S1→этап S2→этап S3→этап S4→этап S5→этап S6→этап S7→этап S8→этап S9→этап S10→конец″ на блок-схеме последовательности операций способа по Фиг. 7.
Затем, на этапе S8, степень вклада α на основе силы нажатия педали вычисляется из характеристики α2 второй степени вклада (Фиг. 8), которая задает степень вклада целевого значения Gs на основе хода S педали так, что она превышает характеристику α1 первой степени вклада.
[0070] Следовательно, когда целевая тормозная сила получается на основе силы нажатия педали, или когда степень вклада не изменяется во время быстрого нажатия, увеличение целевой тормозной силы задерживается относительно увеличения хода педали, и формируется задержка относительно внезапного торможения, выполненного водителем согласно быстрому нажатию тормоза, как проиллюстрировано с помощью характеристик в форме пунктирной линии на Фиг. 11 во время операции быстрого нажатия педали.
[0071] Напротив, когда степень вклада смещается к ходу во время быстрого нажатия, целевая тормозная сила надлежащим образом увеличивается относительно увеличения хода педали, как и в случае получения целевой тормозной силы на основе хода педали, и на внезапное торможение, выполненное водителем согласно быстрому нажатию тормоза, можно реагировать так, как проиллюстрировано с помощью характеристики в форме сплошной линии на Фиг. 11 во время операции быстрого нажатия педали.
[0072] Во время операции медленного нажатия педали повторяется последовательность операций, которая проходит в порядке ″этап S1→этап S2→этап S3→этап S4→этап S5→этап S6→этап S7→этап S8→этап S9→этап S10→конец″ на блок-схеме последовательности операций способа по Фиг. 7, и она указывает идентичную последовательность операции относительно первого варианта осуществления. Следовательно, пояснение опускается.
[0073] Далее поясняются преимущества.
В устройстве управления тормозной силой для транспортного средства во втором варианте осуществления могут быть получены нижеперечисленные преимущества.
[0074] (3) Включается средство вычисления скорости приведения в действие тормоза (этап S5 вычисления изменения скорости хода), которое вычисляет скорость приведения в действие тормоза (изменение ΔS скорости хода), которая является изменением скорости приведения в действие педали тормоза, выполненным водителем, и средство задания степени вклада (этап S6 этап S8 на Фиг. 7) изменяет и задает степень вклада таким образом, что степень вклада (1-α) второго целевого значения торможения (целевого значения Gs на основе хода педали) становится больше, чем больше эта скорость приведения в действие тормоза (изменение ΔS скорости хода) на стороне увеличения.
Следовательно, в дополнение к преимуществам (1) или (2) в первом варианте осуществления, на запрос внезапного торможения, выполняемый водителем, можно реагировать во время операции быстрого нажатия педали.
[0075] (4) Средство задания степени вклада (этапы S6-S8 на Фиг. 7) выбирает характеристику α1 первой степени вклада, которая задает степень вклада α первого целевого значения торможения (целевое значение Gf на основе силы нажатия педали) на стороне, на которой целевое значение торможения (сила нажатия педали) является низким, так что она превышает степень вклада (1-α) второго целевого значения торможения (целевого значения Gs на основе хода педали), когда скорость приведения в действие тормоза (изменение ΔS скорости хода) равна или ниже предписанного значения, и выбирает характеристику α2 второй степени вклада, которая задает степень вклада (1-α) второго целевого значения торможения (целевого значения Gs на основе хода педали) так, что она превышает характеристику α1 первой степени вклада, когда скорость приведения в действие тормоза (изменение ΔS скорости хода) равна или превышает предписанное значение (Фиг. 8).
Следовательно, в дополнение к преимуществам в (3), можно достигать преимущества как недопущения ощущения дискомфорта в ходе операции торможения на стороне, на которой целевое значение торможения является низким, так и обеспечения чувствительности относительно запроса на внезапное торможение согласно простой конфигурации, которая осуществляет выбор между характеристиками α1 и α2 степени вклада на основе того, меньше или больше скорость приведения в действие тормоза (изменение ΔS скорости хода) предписанного значения.
[0076] Устройство управления тормозной силой для транспортного средства в настоящем изобретении пояснено выше на основе первого варианта осуществления и второго варианта осуществления. Тем не менее, конкретная конфигурация не ограничивается этими вариантами осуществления, и изменения и дополнения и т.п. в конструктивном исполнении разрешаются при условии, что эти изменения, дополнения и т.п. не отклоняются от сущности изобретения, связанной с формулой изобретения.
[0077] Пример, который использует целевую тормозную силу в качестве целевого значения торможения, описан в первом варианте осуществления, и пример, который использует целевую величину G замедления в качестве целевого значения торможения, описан во втором варианте осуществления. Тем не менее, целевое значение торможения не ограничивается целевой тормозной силой и целевой степенью замедления, и можно использовать физический показатель изменения силы, прикладываемой к транспортному средству, такой как давление в главном цилиндре, позиция поршня главного цилиндра и т.п. Например, блок-схема управления, проиллюстрированная на Фиг. 12, представляет собой то, что заменяет целевую тормозную силу в первом варианте осуществления целевой позицией поршня. Это становится возможным за счет косвенного управления давлением в главном цилиндре посредством управления позицией поршня главного цилиндра.
[0078] В первом и втором вариантах осуществления показан пример изменения степени вклада при условии, что целевое значение торможения тем меньше, чем меньше эта сила нажатия педали, при вычислении степени вклада. В примере, проиллюстрированном на Фиг. 12, показан пример, который изменяет степень вклада при условии, что целевое значение торможения тем меньше, чем меньше ход педали, при вычислении степени вклада. Тем не менее, можно оценивать целевое значение торможения согласно силе нажатия педали или согласно ходу педали, или согласно и тому, и другому. Эта возможность обнаружена в результате выявления того, что оценка целевого значения торможения на основе силы нажатия педали является более предпочтительной, чем оценка целевого значения торможения на основе хода педали.
[0079] В первом и втором вариантах осуществления, показан пример получения силы нажатия педали от водителя согласно вычислению, которое использует уравнение ввода от входного стержня (Fi). Тем не менее, можно определять силу нажатия педали от водителя согласно способу прямого детектирования силы нажатия педали посредством предоставления тензодатчика и т.п. для входного стержня, рычага педали и т.п.
[0080] В первом и втором вариантах осуществления показан пример применения устройства управления тормозной силой для транспортного средства в настоящем изобретении к электромобилю, такому как автомобиль с электроприводом, гибридный автомобиль и т.п. Тем не менее, можно применять настоящее изобретение к транспортному средству с двигателем, которое использует тормозную систему, которая использует электроусилитель в качестве содействующего механизма.
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
[0081] Настоящая заявка притязает на право приоритета заявки на патент номер 2010-235177, которая подана в Патентное бюро (Япония) 20 октября 2010 года, и ее раскрытие сущности полностью содержится по ссылке в подробном описании настоящего изобретения.







Устройство управления тормозной силой для транспортного средства содержит педаль тормоза, электроусилитель, главный цилиндр, средство детектирования силы нажатия педали, средство детектирования хода педали, средства вычислений первого и второго целевого значений торможения, средство задания степени вклада, средство вычисления целевого значения торможения, средство вычисления скорости приведения в действие тормоза. В главном цилиндре формируется и прикладывается к колесным тормозным цилиндрам давление, которое является итогом суммирования силы нажатия на педаль и результатом работы электроусилителя. В средстве детектирования силы нажатия педали вычисляется ввод от входного стержня в качестве силы нажатия педали по уравнению: -(Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины×относительное смещение (ΔΧ) входного стержня и поршня главного цилиндра. Средство задания степени вклада выдает значения следующими способами. В случае если целевое значение торможения оценивается как низкое и скорость приведения в действие тормоза меньше или равна предписанному значению, то степень вклада первого целевого значения задается так, что превышает степень вклада второго целевого значения торможения. В случае, если скорость приведения в действия тормоза превышает предписанное значение, то задается степень вклада второго целевого значения задается так, что она превышает значение первой степени вклада. Средство вычисления целевого значения торможения вычисляет и суммирует части первого и второго целевого значения торможения. Обеспечивается комфортный режим торможения для водителя. 3 з.п. ф-лы, 12 ил.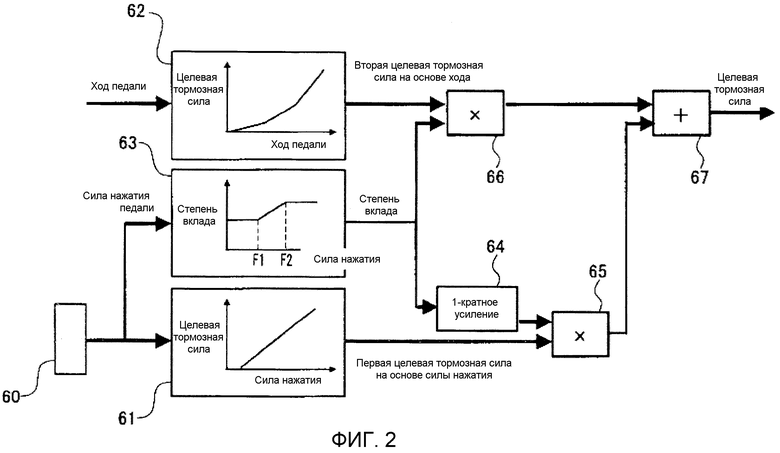
1. Устройство управления тормозной силой для транспортного средства, содержащее:
- педаль тормоза, которая принимает силу нажатия педали от водителя во время операции торможения;
- электроусилитель, который содействует силе нажатия педали за счет толкающей силы электрического приводного механизма;
- главный цилиндр, который работает следующим образом: сила нажатия педали подводится от входного стержня в поршень главного цилиндра через пружину, содействующая толкающая сила в соответствии с работой электроусилителя суммируется с силой нажатия педали, и давление в главном цилиндре формируется и прикладывается к колесным тормозным цилиндрам на каждом колесе;
- средство детектирования силы нажатия педали, которое детектирует силу нажатия педали, прикладываемую к педали тормоза;
- средство детектирования хода педали, которое детектирует ход педали для педали тормоза;
- средство вычисления первого целевого значения торможения, которое вычисляет первое целевое значение торможения на основе силы нажатия педали;
- средство вычисления второго целевого значения торможения, которое вычисляет второе целевое значение торможения на основе хода педали;
- средство задания степени вклада, которое задает степень вклада первого целевого значения торможения так, что она превышает степень вклада второго целевого значения торможения, когда целевое значение торможения оценивается как низкое на основе силы нажатия педали и/или хода педали; и
- средство вычисления целевого значения торможения, которое вычисляет часть первого целевого значения торможения и часть второго целевого значения торможения согласно степеням вклада, заданным согласно средству задания степени вклада, и получает конечное целевое значение торможения посредством суммирования части первого целевого значения торможения и части второго целевого значения торможения.
2. Устройство управления тормозной силой для транспортного средства по п. 1, в котором:
- средство детектирования силы нажатия педали вычисляет ввод от входного стержня (Fi) в качестве силы нажатия педали посредством использования нижеприведенного уравнения:
ввод от входного стержня (Fi)=давление (Pb) в главном цилиндре×площадь (Ai) входного стержня+жесткость (К) пружины×относительное смещение (ΔΧ) входного стержня и поршня главного цилиндра.
3. Устройство управления тормозной силой для транспортного средства по п. 1 или 2, дополнительно содержащее:
- средство вычисления скорости приведения в действие тормоза для вычисления скорости приведения в действие тормоза, которая является скоростью, с которой педаль тормоза нажимается водителем, и
- средство задания степени вклада, изменяющее и задающее степени вклада так, что степень вклада второго целевого значения торможения становится больше по мере того, как скорость приведения в действие тормоза становится больше.
4. Устройство управления тормозной силой для транспортного средства по п. 3, в котором:
- средство задания степени вклада выбирает характеристику первой степени вклада, которая задает степень вклада первого целевого значения торможения, заданную так, что она превышает степень вклада второго целевого значения торможения, при которой целевое значение торможения является низким, когда скорость приведения в действие тормоза равна или меньше предписанного значения, и выбирает характеристику второй степени вклада, которая задает степень вклада второго целевого значения торможения, заданную так, что она превышает характеристику первой степени вклада, когда скорость приведения в действие тормоза превышает предписанное значение.
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

