Область техники
Настоящее изобретение в основном относится к системе управления тормозом транспортного средства. В частности, настоящее изобретение относится к системе управления тормозом транспортного средства, которая совместно управляет фрикционной тормозной системой и рекуперативной тормозной системой, чтобы улучшать ощущение при операции торможения в переходный период, при котором рекуперативный тормозной момент изменяется внезапно.
Уровень техники
Обычное устройство управления тормозом транспортного средства управляет компонентами рекуперативного торможения и фрикционного торможения, чтобы достигать целевого тормозного момента в ответ на операцию торможения или другое состояние вождения. В общем, устройство управления тормозом транспортного средства должно управлять компонентами рекуперативного торможения для выполнения рекуперативного торможения, чтобы пытаться достичь требуемого тормозного момента. Если требуемый тормозной момент не может достигаться с помощью рекуперативного торможения, устройство управления может управлять компонентами фрикционного торможения, чтобы подавать дополнительный тормозной момент, который компенсирует нехватку тормозного момента, обеспечиваемую компонентами рекуперативного торможения. Следовательно, поскольку рекуперативное торможение используется в максимально возможной степени, использование фрикционного торможения может быть сведено к минимуму. Соответственно, можно максимизировать или, по меньшей мере, увеличивать величину кинетической энергии транспортного средства, которая восстанавливается в качестве электроэнергии вследствие рекуперативного торможения, при минимизации потерь кинетической энергии транспортного средства в качестве тепла вследствие фрикционного торможения. Как результат, могут повышаться эффективность использования энергии, расход топлива и потребление электричества.
Пример фрикционной тормозной системы описан в публикации выложенной заявки на патент Японии № 2009-154814. Фрикционная тормозная система включает в себя главный цилиндр с дополнительным усилением от электромотора, который управляется в ответ на операцию торможения через педаль тормоза и т.п. Главный цилиндр преобразует силу операции торможения в давление жидкости, которое используется для управления фрикционным тормозным модулем так, чтобы формировать фрикционный тормозной момент. Фрикционный тормозной момент может сглаживаться посредством управления дополнительным усилением от электромотора главного цилиндра.
Соответственно, управление тормозной силой выполняется для того, чтобы подавать целевой тормозной момент на основе операции торможения и т.п. Рекуперативная тормозная система подает рекуперативный тормозной момент, а фрикционная тормозная система, которая сглаживается посредством управления дополнительным усилением от электромотора, подает фрикционный тормозной момент для компенсации нехватки тормозного момента.
Главный цилиндр с дополнительным усилением от электромотора использует поршень с дополнительным усилителем от электромотора, чтобы вжимать первичный поршень главного цилиндра. Как результат, колебание давления жидкости в ходе управления дополнительным усилением от электромотора, описанного выше, может приводить к варьированиям силы операции торможения. Эти варьирования могут включать в себя варьирования усилия на педали тормоза, которые могут оказывать негативное влияние на ощущение при операции торможения. Следовательно, когда необходимо варьировать фрикционный тормозной момент в ответ на варьирования рекуперативного тормозного момента, колебание давления жидкости варьирует усилие на педали тормоза. Соответственно, оказывается негативное влияние на ощущение при операции торможения.
Тем не менее система, описанная в выложенной заявке на патент Японии № 2009-154814, выполняет операции в попытке уменьшать это варьирование усилия на педали тормоза. В частности, размещается пружина между первичным поршнем и поршнем с дополнительным усилителем от электромотора. Следовательно, упругая деформация пружины не допускает полной передачи силы, которая сопровождает колебание давления жидкости, на педаль тормоза. Через эту конфигурацию может уменьшаться варьирование усилия на педали тормоза вследствие варьирований пропорционального распределения тормозного момента между рекуперативным торможением и фрикционным торможением. Таким образом, могут быть уменьшены негативные эффекты на ощущение при операции торможения.
Краткое описание изобретения
Тем не менее в традиционной аппаратной системе управления тормозной силой, описанной выше, хотя ощущение при операции торможения может быть в определенной степени улучшено, конфигурация пружины, в общем, не может в достаточной степени компенсировать внезапные колебания давления жидкости вследствие управления дополнительным усилением от электромотора. Соответственно, варьирования усилия на педали тормоза не могут надлежащим образом уменьшаться, и операция торможения, в общем, вызывает некомфортное ощущение у водителя.
В связи с вышеизложенным задачей настоящего изобретения является создание аппаратной системы управления тормозной силой, которая допускает уменьшение варьирований силы операции торможения даже в ходе внезапных варьирований в переходном процессе рекуперативного тормозного момента, так что ощущение при операции торможения является достаточно комфортным для водителя.
С учетом состояния известной технологии система управления тормозом транспортного средства по существу включает в себя компонент управления рекуперативным торможением, компонент управления фрикционным торможением, компонент вычисления и компонент управления. Компонент управления рекуперативным торможением выполнен с возможностью управления рекуперативным тормозным устройством, чтобы обеспечивать рекуперативный тормозной момент. Компонент управления фрикционным торможением выполнен с возможностью управления фрикционным тормозным устройством, чтобы обеспечивать фрикционный тормозной момент. Компонент вычисления выполнен с возможностью вычисления значения фильтрации рекуперативного тормозного момента на основе частоты колебания рекуперативного тормозного момента. Компонент управления выполнен с возможностью, в течение первого состояния, управления устройством управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента, а не на основе рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения.
Краткое описание чертежей
Далее изобретение будет описано со ссылкой на прилагаемые чертежи, которые являются частью этого описания и на которых:
Фиг. 1 - функциональная блок-схема, показывающая пример системы управления тормозом транспортного средства согласно раскрытому варианту осуществления;
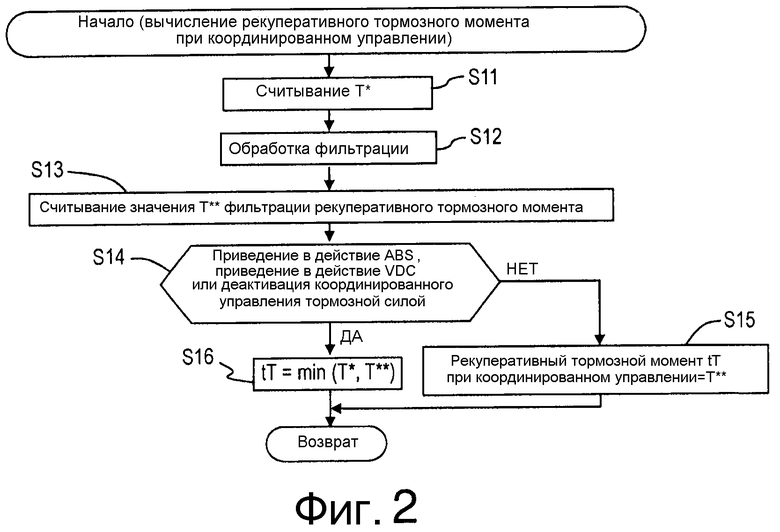
Фиг. 2 - блок-схема последовательности операций способа, показывающая пример процесса управления, который может быть выполнен посредством процессора вычислений фильтра приоритизации ощущений при нажатии педали из системы управления тормозом транспортного средства, показанной на фиг. 1, чтобы вычислять рекуперативный тормозной момент согласно раскрытому варианту осуществления;
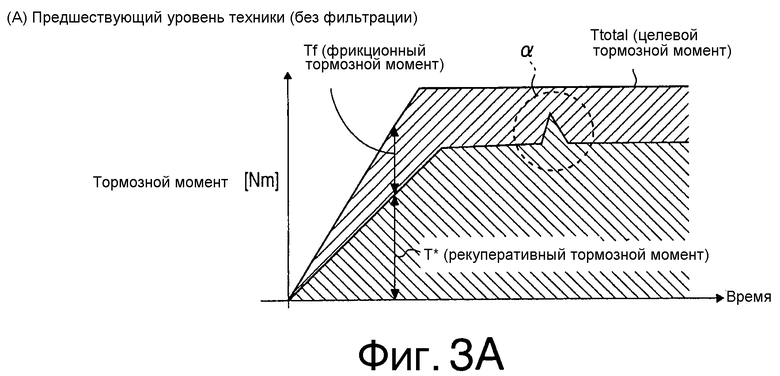
Фиг. 3A - функциональная временная диаграмма, иллюстрирующая пример взаимосвязи между рекуперативным тормозным моментом, фрикционным тормозным моментом и целевым тормозным моментом относительно времени, когда процессор вычислений фильтра приоритизации ощущений при нажатии педали не осуществляет процесс управления, показанный на фиг. 2;
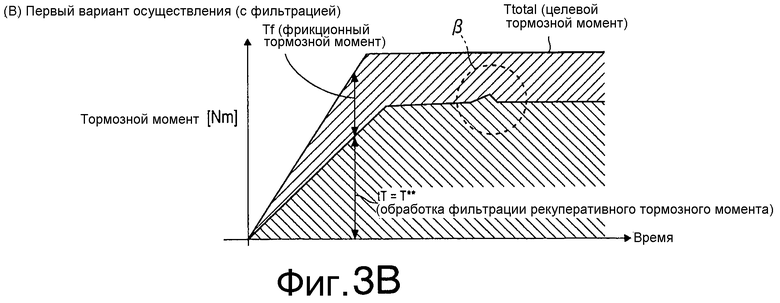
Фиг. 3B - функциональная временная диаграмма, иллюстрирующая пример взаимосвязи между рекуперативным тормозным моментом, фрикционным тормозным моментом и целевым тормозным моментом относительно времени, когда процессор вычислений фильтра приоритизации ощущений при нажатии педали осуществляет процесс управления, показанный на фиг. 2;
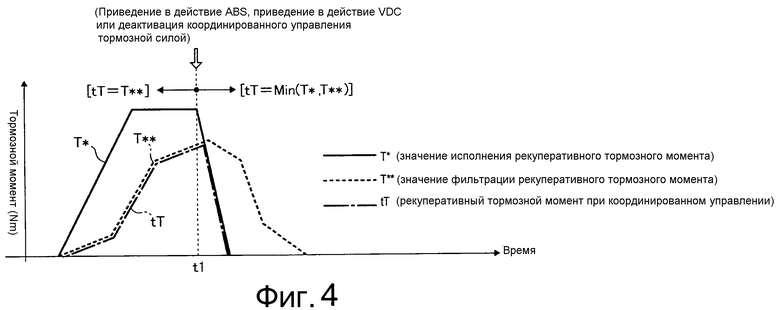
Фиг. 4 - функциональная временная диаграмма, иллюстрирующая пример рекуперативного тормозного момента относительно времени, которое достигается, когда процессор вычислений фильтра приоритизации ощущений при нажатии педали осуществляет процесс управления, показанный на фиг. 2;
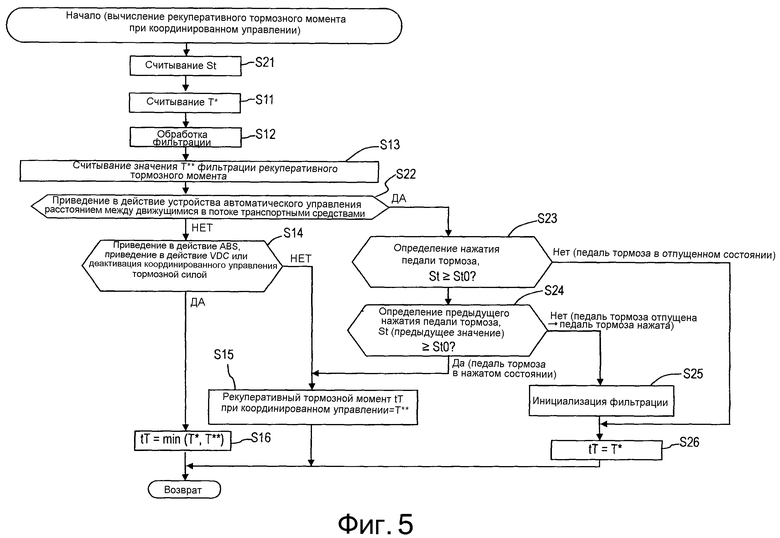
Фиг. 5 - блок-схема последовательности операций способа, показывающая пример процесса управления, который может быть выполнен посредством процессора вычислений фильтра приоритизации ощущений при нажатии педали из системы управления тормозом транспортного средства, показанной на фиг. 1, чтобы вычислять рекуперативный тормозной момент согласно другому раскрытому варианту осуществления; и
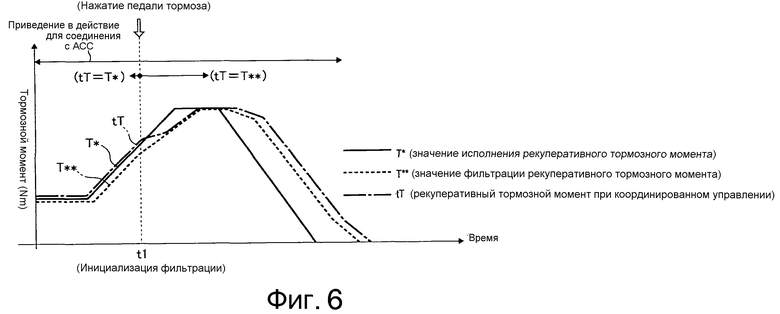
Фиг. 6 - функциональная временная диаграмма, иллюстрирующая пример рекуперативного тормозного момента относительно времени, которое достигается, когда процессор вычислений фильтра приоритизации ощущений при нажатии педали осуществляет процесс управления, показанный на фиг. 5.
Подробное описание вариантов осуществления изобретения
Выбранные варианты осуществления далее поясняются со ссылкой на чертежи. Специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что последующие описания вариантов осуществления обеспечиваются только для иллюстрации, а не для ограничения объема изобретения, определяемого прилагаемой формулой изобретения и ее эквивалентами.
Фиг. 1 является функциональной блок-схемой, иллюстрирующей пример системы управления тормозом транспортного средства согласно раскрытому варианту осуществления. Система управления тормозом транспортного средства может использоваться в любом подходящем типе транспортного средства, таком как автомобиль, грузовик, фургон, внедорожник и т.д., имеющем колеса 1. В примере, показанном на фиг. 1, по меньшей мере, одно из колес 1 приводится в движение посредством электромотора 2. Тем не менее транспортное средство вместо этого может быть гибридным транспортным средством, как следует понимать в данной области техники, или любым другим типом транспортного средства с надлежащим приведением в движение от двигателя.
Чтобы управлять приведением в действие электромотора 2, контроллер 3 электромотора преобразует электроэнергию аккумулятора 4 (например, конденсатора) из постоянного тока в переменный ток с помощью, например, инвертора 5 или любого другого подходящего устройства. Инвертор 5 таким образом подает мощность переменного тока в электромотор 2, управляемый посредством контроллера 3. Следовательно, контроллер 3 управляет приведением в действие электромотора 2 так, что крутящий момент электромотора 2 равняется или, по меньшей мере, практически равняется целевому крутящему моменту Tm электромотора, предоставляемому посредством контроллера 3 электромотора.
Целевой крутящий момент Tm электромотора, обеспечиваемый контроллером 3 электромотора, может включать в себя, например, значение крутящего момента и информацию, касающуюся направления вращения, чтобы управлять режимами движения вперед и задним ходом транспортного средства. Когда транспортное средство остановлено, значение крутящего момента может быть нулевым. Когда целевой крутящий момент Tm электромотора указывает, что рекуперативное торможение от электромотора 2 должно применяться в ответ на команду T управления рекуперативным тормозным моментом, показанную на фиг. 1, контроллер 3 электромотора передает нагрузку по выработке электроэнергии на электромотор 2 через инвертор 5. Нагрузка по выработке электроэнергии, которая передается на электромотор 2, имеет такое значение, чтобы не заряжать избыточно аккумулятор 4 при передаче рекуперативного тормозного момента на колеса 1. Помимо этого, контроллер 3 электромотора в это время преобразует электроэнергию, сформированную через рекуперативное торможение посредством электромотора 2, из переменного тока в постоянный ток с помощью инвертора 5. Таким образом, контроллер 3 электромотора может использовать этот постоянный ток, чтобы заряжать аккумулятор 4.
В дополнение к рекуперативному торможению, описанному выше, транспортное средство также может тормозить посредством фрикционного торможения. Комбинация рекуперативной тормозной системы и фрикционной тормозной системы может упоминаться, например, как комбинированная система или комбинированная тормозная система, как следует понимать в данной области техники.
Фрикционная тормозная система в этом примере включает в себя педаль 11 тормоза и главный цилиндр 12 с дополнительным усилением от электромотора, как показано на фиг. 1. Определенные компоненты фрикционной тормозной системы, не описанные в иных отношениях в данном документе, могут быть идентичными или аналогичными компонентам, описанным в выложенной заявке на патент Японии № 2009-154814, упомянутой ранее.
Когда водитель нажимает педаль 11 тормоза, педаль 11 тормоза формирует ход St педали согласно усилию на педали (силе операции торможения). Главный цилиндр 12 с дополнительным усилением от электромотора управляется в ответ на ход St педали, и давление Pm жидкости в главном цилиндре формируется посредством хода с толканием первичного поршня (не показан). Другими словами, главный цилиндр 12 с дополнительным усилением от электромотора преобразует силу надавливания (силу операции торможения) педали 11 тормоза в давление Pm жидкости в главном цилиндре. Давление Pm жидкости в главном цилиндре подается на суппорты тормоза или другие фрикционные тормозные модули 19, связанные с колесами 1. Фрикционный тормозной модуль 19 управляется посредством давления жидкости для передачи фрикционного тормозного момента на колеса 1.
Таким образом, главный цилиндр 12 с дополнительным усилением от электромотора и связанные компоненты могут выступать в качестве компонента управления фрикционным торможением, который выполнен с возможностью управлять фрикционным тормозным устройством 19, чтобы обеспечивать фрикционный тормозной момент.
Главный цилиндр 12 с дополнительным усилением от электромотора в этом примере включает в себя сервомотор 13 для осуществления управления дополнительным усилением от электромотора. Для ясности в этом примере сервомотор 13 показан отдельно от главного цилиндра 12 с дополнительным усилением от электромотора на фиг. 1. Тем не менее сервомотор 13 может быть включен в главный цилиндр 12 с дополнительным усилением от электромотора. Сервомотор 13 толкает первичный поршень, чтобы выполнять функцию дополнительного усиления, как пояснено выше. Следовательно, главный цилиндр 12 с дополнительным усилением от электромотора может сглаживать и регулировать давление Pm жидкости в главном цилиндре (т.е. фрикционный тормозной момент) через управление дополнительным усилением от электромотора от опорного давления жидкости (опорного тормозного момента), который находится в соответствии с силой надавливания (силой операции торможения) педали 11 тормоза.
В этом примере тормозной контроллер 14 может осуществлять управление дополнительным усилением от электромотора, поясненное выше. Тормозной контроллер 14 может включать в себя компьютер 15 для вычисления целевого тормозного момента, компьютер 16 для распределения рекуперативного/фрикционного тормозного момента, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали и модуль 18 вычитания, как показано на фиг. 1.
Также следует отметить, что контроллер 3 электромотора и компоненты тормозного контроллера 14, такие как компьютер 15 для вычисления целевого тормозного момента, компьютер 16 для распределения рекуперативного/фрикционного тормозного момента и процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали, показанные на фиг. 1, и любой другой контроллер, поясненный в данном документе, могут включать в себя или совместно использовать, например, микрокомпьютер с управляющей программой, которая управляет и взаимодействует с компонентами транспортного средства, как пояснено в данном документе. Контроллер 3 электромотора, тормозной контроллер 14, компьютер 15 для вычисления целевого тормозного момента, компьютер 16 для распределения рекуперативного/фрикционного тормозного момента, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали и любой другой контроллер, поясненный в данном документе, также могут включать в себя или совместно использовать другие стандартные компоненты, такие как схема интерфейса ввода, схема интерфейса вывода, и устройства хранения данных, такие как устройство ПЗУ (постоянное запоминающее устройство) и устройство ОЗУ (оперативное запоминающее устройство). ОЗУ и ПЗУ сохраняют результаты обработки и управляющие программы, которые запускаются посредством контроллера 3 электромотора, тормозного контроллера 14, компьютера 15 для вычисления целевого тормозного момента, компьютера 16 для распределения рекуперативного/фрикционного тормозного момента и процессора 17 вычислений фильтра приоритизации ощущений при нажатии педали. Кроме того, контроллер 3 электромотора, тормозной контроллер 14, компьютер 15 для вычисления целевого тормозного момента, компьютер 16 для распределения рекуперативного/фрикционного тормозного момента, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали и любой другой контроллер, поясненный в данном документе, функционально соединяются с компонентами транспортного средства традиционным способом. Специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что точная структура и алгоритмы для контроллера 3 электромотора, тормозного контроллера 14, компьютера 15 для вычисления целевого тормозного момента, компьютера 16 для распределения рекуперативного/фрикционного тормозного момента, процессора 17 вычислений фильтра приоритизации ощущений при нажатии педали и любого другого контроллера, поясненного в данном документе, могут представлять собой любую комбинацию аппаратных средств и программного обеспечения, которые должны выполнять функции вариантов осуществления, поясненных в данном документе.
В этом примере компьютер 15 для вычисления целевого тормозного момента вычисляет целевой тормозной момент Ttotal транспортного средства, затребованный водителем, из хода St педали и давления Pm жидкости в главном цилиндре. Компьютер 16 для распределения рекуперативного/фрикционного тормозного момента вычисляет команду Tm управления рекуперативным тормозным моментом на основе целевого тормозного момента Ttotal и значений определения, предоставляемых посредством различных датчиков. Эти значения определения могут включать в себя скорость вращения колес в соответствии с показаниями датчика скорости вращения колес, поперечное ускорение транспортного средства в соответствии с показаниями датчика поперечного ускорения и скорость относительно вертикальной оси транспортного средства в соответствии с показаниями датчика скорости относительно вертикальной оси.
Тормозной контроллер 14 и, в частности, компьютер 16 для распределения рекуперативного/фрикционного тормозного момента предоставляет команду Tm управления рекуперативным тормозным моментом в контроллер 3 электромотора. Контроллер 3 электромотора вычисляет целевой крутящий момент Tm электромотора на основе команды Tm управления рекуперативным тормозным моментом. Таким образом, контроллер 3 электромотора управляет приведением в действие электромотора 2 через инвертор 5 на основе целевого крутящего момента Tm электромотора, чтобы передавать рекуперативный тормозной момент на колеса 1. Соответственно, любой из компьютера 15 для вычисления целевого тормозного момента, компьютера 16 для распределения рекуперативного/фрикционного тормозного момента и контроллера 3 электромотора может выступать в качестве компонента управления рекуперативным торможением, который выполнен с возможностью управлять рекуперативным тормозным устройством, таким как электромотор 2, чтобы обеспечивать рекуперативный тормозной момент.
Как дополнительно показано, контроллер 3 электромотора вычисляет значение T* исполнения рекуперативного тормозного момента, передаваемое на колеса 1, подвергающиеся рекуперативному торможению. Контроллер 3 электромотора тем самым предоставляет значение T* исполнения рекуперативного тормозного момента в процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали.
Процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может выполнять операции управления, показанные на фиг. 2. Процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали применяет предварительно определенную обработку с помощью фильтра к значению T* исполнения рекуперативного тормозного момента и вычисляет рекуперативный тормозной момент tT при координированном управлении. Соответственно, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может улучшать ощущение при операции торможения в ходе управления тормозной силой для подачи целевого тормозного момента Ttotal посредством предоставления возможности взаимодействия между рекуперативным торможением и фрикционным торможением.
Сначала описывается ощущение при операции торможения в ходе управления тормозной силой. В общем, в ходе управления тормозной силой значение T* исполнения рекуперативного тормозного момента (или команда Tm управления рекуперативным тормозным моментом) используется без модификации. Как показано на фиг. 1, модуль 18 вычитания определяет разность между значением T* исполнения рекуперативного тормозного момента и целевым тормозным моментом Ttotal. В этом примере модуль 18 вычитания определяет разность посредством вычитания значения T* исполнения рекуперативного тормозного момента из целевого тормозного момента Ttotal. Вывод разности из модуля 18 вычитания обозначается как команда Tf управления фрикционным тормозным моментом. Команда Tf управления фрикционным тормозным моментом, следовательно, управляет сервомотором 13, чтобы достигать фрикционного тормозного момента на основе значения Tf команды управления.
Как пояснено выше, можно использовать значение T* исполнения рекуперативного тормозного момента без модификации. Тем не менее значение T* исполнения рекуперативного тормозного момента может быть подвержено внезапному варьированию в переходном процессе, как показано в области α на фиг. 3A. Когда это происходит, команда Tf управления фрикционным тормозным моментом, полученная посредством вычитания значения T* исполнения рекуперативного тормозного момента из целевого тормозного момента Ttotal, также внезапно изменяется согласно идентичному или примерно идентичному изменению во времени.
Как пояснено выше, главный цилиндр 12 с дополнительным усилением от электромотора подает команду Tf управления фрикционным тормозным моментом через управление дополнительным усилением от электромотора, в течение которого сервомотор 13 инструктирует первичному поршню выполнять ход. Следовательно, внезапное варьирование команды Tf управления фрикционным тормозным моментом может приводить к тому, что усилие на педали тормоза (сила операции торможения) внезапно изменяется по тракту δ, показанному на фиг. 1, через внезапное варьирование давления жидкости в главном цилиндре. Как результат, на ощущение при операции торможения педали 11 тормоза может оказываться негативное влияние, и водитель может испытывать дискомфорт при операции торможения.
Чтобы уменьшать эту проблему, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может выполнять примерные операции, показанные на фиг. 2. Посредством выполнения этих операций процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может выполнять фильтрацию нижних частот со значением T* исполнения рекуперативного тормозного момента в соответствии с частотой колебания значения T* исполнения рекуперативного тормозного момента. Процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может вычислять рекуперативный тормозной момент tT при координированном управлении способом, описанным ниже. Кроме того, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может использовать рекуперативный тормозной момент tT при координированном управлении при координированном управлении тормозной силой посредством управления дополнительным усилением от электромотора. Кроме того следует отметить, что фильтрация не обязательно должна быть фильтрацией нижних частот. Наоборот, может быть использована любая подходящая операция фильтрации, которая допускает задание первичной задержки в значении T* исполнения рекуперативного тормозного момента. Кроме того, хотя процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали выполняет обработку, показанную на фиг. 2 в этом примере, обработка может быть выполнена полностью или частично посредством любого другого подходящего компонента в системе управления тормозом транспортного средства.
На этапе S11 по фиг. 2, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали считывает значение T* исполнения рекуперативного тормозного момента, предоставляемое посредством контроллера 3 электромотора. На этапе S12 процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может выполнять обработку с помощью фильтра со значением T* исполнения рекуперативного тормозного момента, считанным на этапе S11, в соответствии с частотой колебания значения T* исполнения рекуперативного тормозного момента. Таким образом, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может выступать в качестве компонента вычисления, который выполнен с возможностью вычислять значение фильтрации рекуперативного тормозного момента на основе частоты колебания рекуперативного тормозного момента. На этапе S13 процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали тем самым считывает значение T** фильтрации рекуперативного тормозного момента, к которому применена обработка фильтрации. Следовательно, этапы S12 и S13 могут рассматриваться как выполнение вычисления значений фильтрации рекуперативного тормозного момента.
На этапе S14 на основе значений определения различных датчиков, показанных на фиг. 1, выполняется определение в отношении того, приведено или нет устройство управления предотвращением блокировки (ABS) в действие. Как следует понимать в данной области техники, ABS может регулировать тормозной момент, чтобы предотвращать блокировку тормозов колес 1. На этапе S14 также выполняется определение в отношении того, приведено или нет устройство управления маневренностью транспортного средства (VDC) в действие для регулирования тормозного момента, чтобы управлять маневренностью транспортного средства. Кроме того, на этапе S14 выполняется определение в отношении того, деактивировано или нет управление тормозной силой посредством управления дополнительным усилением от электромотора посредством такого состояния, как деактивация рекуперативного торможения вследствие полной зарядки аккумулятора 4.
Когда на этапе S14 выполнено определение того, что существует первое состояние, в котором ABS и VDC не приведены в действие, и координированное управление тормозной силой не деактивировано, значение T** фильтрации рекуперативного тормозного момента, считанное на этапе S13, задается как рекуперативный тормозной момент tT при координированном управлении на этапе S15. Тем не менее, когда на этапе S14 выполнено определение того, что ABS или VDC приведено в действие или координированное управление тормозной силой деактивировано (например, существует второе состояние), обработка переходит к этапу S16. На этапе S16 меньшее значение min(T*, T**) из значения T* исполнения рекуперативного тормозного момента, считанного на этапе S11, и значения T** фильтрации рекуперативного тормозного момента, считанного на этапе S13, задается как рекуперативный тормозной момент tT при координированном управлении.
После того как обработка, показанная на фиг. 2, завершена, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали предоставляет вычисленный рекуперативный тормозной момент tT при координированном управлении в модуль 18 вычитания. Модуль 18 вычитания тем самым вычитает рекуперативный тормозной момент tT при координированном управлении из целевого тормозного момента Ttotal, чтобы формировать команду Tf управления фрикционным тормозным моментом. Модуль 18 вычитания предоставляет команду Tf управления фрикционным тормозным моментом в сервомотор 13. Соответственно, сервомотор 13 сглаживает и регулирует давление Pm жидкости в главном цилиндре от опорного давления, которое основано на силе надавливания (силе операции торможения) педали 11 тормоза, чтобы обеспечивать фрикционный тормозной момент на основе значения Tf команды управления. Иными словами, сервомотор 13 осуществляет управление дополнительным усилением от электромотора главного цилиндра 12 с дополнительным усилением от электромотора, чтобы обеспечивать фрикционный тормозной момент на основе значения Tf команды управления.
Соответственно, система управления тормозом транспортного средства, описанная выше, предоставляет целевой тормозной момент Ttotal посредством объединения рекуперативного торможения с фрикционным тормозным моментом Tf. Фрикционный тормозной момент Tf получается посредством вычитания рекуперативного тормозного момента tT при координированном управлении из целевого тормозного момента Ttotal. Как пояснено выше, значение T** фильтрации рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении (этап S15), когда ABS и VDC не активированы, и координированное управление тормозной силой не деактивировано (этап S14). Следовательно, команда Tf управления фрикционным тормозным моментом вычисляется из целевого тормозного момента Ttotal и значения T** фильтрации рекуперативного тормозного момента, которое подставляется вместо значения T* исполнения рекуперативного тормозного момента, как показано на фиг. 3B. Кроме того, команда Tf управления фрикционным тормозным моментом используется для управления тормозной силой, чтобы подавать целевой тормозной момент Ttotal. Соответственно, компоненты тормозного контроллера 14 могут считаться выступающими в качестве компонента управления, который выполнен с возможностью, в течение первого состояния, как описано выше, управления устройством управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента, а не на основе рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения.
Кроме того, главный цилиндр 12 с дополнительным усилением от электромотора (сервомотор 13) может использовать значение T** фильтрации рекуперативного тормозного момента вместо значения T* исполнения рекуперативного тормозного момента в ходе координированного управления силой торможения, как пояснено выше. Следовательно, даже когда значение T* исполнения рекуперативного тормозного момента подвергается внезапному варьированию в переходном процессе, как показано в области α на фиг. 3A, варьирование рекуперативного тормозного момента tT при координированном управлении, используемого при координированном управлении тормозной силой, является постепенным и небольшим, как показано в области β на фиг. 3B. Следовательно, постепенное, небольшое варьирование также возникает в команде Tf управления фрикционным тормозным моментом, которая получается посредством вычитания рекуперативного тормозного момента tT при координированном управлении (значения T** фильтрации рекуперативного тормозного момента) из целевого тормозного момента Ttotal.
Приведение в действие (эффект управления дополнительным усилением от электромотора) сервомотора 13 для подачи команды Tf управления фрикционным тормозным моментом, следовательно, является постепенным и небольшим. Кроме того, варьирование силы надавливания (варьирование силы операции торможения) педали 11 тормоза посредством управления дополнительным усилением от электромотора главного цилиндра 12 может надлежащим образом уменьшаться. Это позволяет не допускать некомфортного ощущения при операции торможения для водителя.
С другой стороны, когда ABS или VDC приведено в действие в ходе координированного управления силой торможения, как пояснено выше, или координированное управление тормозной силой деактивировано посредством такого состояния, как деактивация рекуперативного торможения (этап S14), которое может упоминаться как второе состояние, поясненное выше, меньшее min(T*, T**) из значения T* исполнения рекуперативного тормозного момента и значения T** фильтрации рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении (этап S16). Тормозной контроллер 14, который может считаться выступающим в качестве компонента управления, дополнительно выполнен с возможностью, в течение второго состояния, управлять устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент. Таким образом, рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения.
Кроме того, если ABS активирована, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может считаться выступающим в качестве компонента определения состояния предотвращения блокировки, который может определять третье состояние, в течение которого тормозной момент, прикладываемый к колесам транспортного средства, включающего в себя систему управления тормозом транспортного средства, регулируется таким образом, чтобы предотвращать блокировку тормозов колес. В этом случае тормозной контроллер 14 может считаться выступающим в качестве компонента управления, который дополнительно может, в течение третьего состояния, управлять устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент. Таким образом, рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент определения состояния предотвращения блокировки регулирует тормозной момент, прикладываемый к колесам, чтобы предотвращать блокировку тормозов колес.
Помимо этого, если VDC активировано, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может считаться выступающим в качестве компонента определения состояния маневрирования транспортного средства, который может определять четвертое состояние, в течение которого регулируется тормозной момент, используемый для управления маневренностью транспортного средства для транспортного средства, включающего в себя систему управления тормозом транспортного средства. В этом случае тормозной контроллер 14 может считаться выступающим в качестве компонента управления, который дополнительно может, в течение четвертого состояния, управлять устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент. Таким образом, рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент управления маневренностью транспортного средства регулирует тормозной момент, используемый для управления маневренностью транспортного средства.
Как показано на фиг. 4, значение T* исполнения рекуперативного тормозного момента и значение T** фильтрации рекуперативного тормозного момента указываются посредством сплошной линии и пунктирной линии соответственно. Как указано, рекуперативный тормозной момент tT при координированном управлении является идентичным значению T** фильтрации рекуперативного тормозного момента во время или до времени t1, как указано посредством штрихпунктирной линии.
С началом во время t1 ABS или VDC приводится в действие, или координированное управление тормозной силой деактивируется посредством такого состояния, как деактивация рекуперативного торможения. Соответственно, рекуперативный тормозной момент tT при координированном управлении становится идентичным меньшему min(T*, T**) из значения T* исполнения рекуперативного тормозного момента и значения T** фильтрации рекуперативного тормозного момента, как описано выше. Как указано посредством штрихпунктирной линии на фиг. 4, когда значение T* исполнения рекуперативного тормозного момента опускается ниже значения T** фильтрации рекуперативного тормозного момента, рекуперативный тормозной момент tT при координированном управлении получает значение T*. Таким образом, команда Tf управления фрикционным тормозным моментом вычисляется посредством вычитания min(T*, T**) из целевого тормозного момента Ttotal. Как пояснено выше, команда Tf управления фрикционным тормозным моментом используется для координированного управления тормозной силой, чтобы обеспечивать целевой тормозной момент Ttotal.
Как очевидно из фиг. 4, рекуперативный тормозной момент tT при координированном управлении начинает уменьшаться во время t1. Следовательно, фрикционный тормозной момент может быть быстро восстановлен, когда ABS или VDC приведено в действие, или координированное управление тормозной силой деактивировано посредством такого состояния, как деактивация рекуперативного торможения. Следовательно, тормозное расстояние в ходе приведения в действие устройства управления предотвращением блокировки (ABS), которое сопровождает экстренное торможение, может быть сокращено. Кроме того, маневрирование транспортного средства может быть быстро стабилизировано посредством приведения в действие VDC. Кроме того, быстрый переход во фрикционное торможение может осуществляться, когда деактивировано координированное управление тормозной силой.
Фиг. 5 является блок-схемой последовательности операций способа, показывающей пример процесса управления, который может быть выполнен посредством, например, процессора 17 вычислений фильтра приоритизации ощущений при нажатии педали, чтобы вычислять рекуперативный тормозной момент tT, который используется для координированного управления тормозной силой. Как указано, операции S11-S16 соответствуют операциям блок-схемы последовательности операций способа, показанной на фиг. 2. Процесс, показанный на фиг. 5 дополнительно включает в себя этапы S21-S26, которые поясняются ниже. Как показано, этап S21 выполняется непосредственно перед или, по меньшей мере, до этапа S11. На этапе S21 считывается ход St нажатия (см. фиг. 1) педали 11 тормоза.
На этапах S11-S13 выполняется обработка, идентичная или аналогичная обработке на этапах, указываемых посредством идентичных ссылочных позиций на фиг. 2. Другими словами, значение T* исполнения рекуперативного тормозного момента считывается на этапе S11. Значение T** фильтрации рекуперативного тормозного момента, которое является результатом фильтрации значения T* исполнения рекуперативного тормозного момента, вычисляется на этапе S12. Значение T** фильтрации рекуперативного тормозного момента считывается на этапе S13.
Как дополнительно показано, этап S22 выполняется непосредственно после или, по меньшей мере, позднее этапа S13. На этапе S22, обработка определяет то, существует или нет пятое состояние, в котором приведено в действие устройство автоматического управления расстоянием между движущимися в потоке транспортными средствами (ACC) для автоматического формирования тормозного момента для управления расстоянием между движущимися в потоке транспортными средствами. Соответственно, процессор 17 вычислений фильтра приоритизации ощущений при нажатии педали может считаться выступающим в качестве компонента определения состояния автоматического управления расстоянием между движущимися в потоке транспортными средствами, который может определять пятое состояние, в течение которого формируется тормозной момент, используемый для автоматического управления расстоянием между движущимися в потоке транспортными средствами для транспортного средства, включающего в себя систему управления тормозом транспортного средства.
Следует отметить, что в ходе торможения, которое сопровождает приведение в действие ACC, поскольку водитель не нажимает педаль 11 тормоза, ощущение при операции торможения не является релевантным. Следовательно, когда обработка определяет на этапе S22, что ACC не приведено в действие, обработка переходит к этапам S14-S16, как пояснено выше.
Тем не менее, когда обработка определяет на этапе S22, что ACC приведено в действие, обработка переходит к этапу S23. В обработке, начинающейся на этапе S23, вычисляется рекуперативный тормозной момент tT при координированном управлении, как описано ниже, и рекуперативный тормозной момент tT при координированном управлении используется для координированного управления тормозной силой. На этапе S23, обработка определяет то, нажимается или нет педаль 11 тормоза в данный момент, на основе того, равен или превышает либо нет ход St педали тормоза, считываемый на этапе S21, значение St0 определения нажатия. Когда педаль 11 тормоза в данный момент нажимается, обработка определяет на этапе S24, является или нет предыдущий ход St педали тормоза состоянием нажатия педали тормоза. Другими словами, обработка определяет то, продолжается состояние нажатия педали тормоза или педаль 11 тормоза нажимается в данный момент из отпущенного состояния. В этом примере определение выполняется на основе того, равен или превышает либо нет предыдущий ход St педали тормоза (предыдущее значение) значение St0 определения нажатия.
Когда обработка определяет на этапе S24, что педаль 11 тормоза нажимается из отпущенного состояния, обработка фильтрации, выполненная ранее на этапе S12, инициализируется на этапе S25, который выполняется один раз в начале нажатия педали тормоза. На этапе S26 значение T* исполнения рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении и используется для координированного управления тормозной силой, показанного на фиг. 1, как пояснено выше. Соответственно, тормозной контроллер 14 может считаться выступающим в качестве компонента управления, который дополнительно выполнен с возможностью, в течение пятого состояния, управлять устройством управления дополнительным усилением от электромотора на основе рекуперативного тормозного момента, вместо значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент. Таким образом, рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент определения состояния автоматического управления расстоянием между движущимися в потоке транспортными средствами.
Тем не менее, когда обработка определяет на этапе S24, что нажатое состояние педали 11 тормоза продолжается, ощущение при операции торможения должно быть принято во внимание. Следовательно, обработка переходит к этапу S15, и значение T** фильтрации рекуперативного тормозного момента, вычисленное на этапе S12 после инициализации на этапе S25, задается как рекуперативный тормозной момент tT при координированном управлении. Этот рекуперативный тормозной момент tT при координированном управлении используется для координированного управления тормозной силой, как показано на фиг. 1.
С другой стороны, когда обработка определяет на этапе S23, что ход St педали тормоза меньше значения St0 определения нажатия, обработка определяет то, что педаль 11 тормоза не нажата и, таким образом, находится в отпущенном состоянии. Поскольку ощущение при операции торможения не должно рассматриваться в это время, обработка переходит к этапу S26. Таким образом, значение T* исполнения рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении и используется для координированного управления тормозной силой, как показано на фиг. 1.
Другими словами, после того как операция торможения выполнена, тормозной контроллер 14 (компонент управления) дополнительно может управлять устройством управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента вместо рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент. Таким образом, рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения после того, как автоматическое управление расстоянием между движущимися в потоке транспортными средствами закончило формирование тормозного момента, используемого для автоматического управления расстоянием между движущимися в потоке транспортными средствами.
Соответственно, посредством выполнения обработки, показанной на фиг. 5, целевой тормозной момент Ttotal может обеспечиваться идентичным или аналогичным способом относительно обработки, показанной на фиг. 2. Иными словами, целевой тормозной момент Ttotal может обеспечиваться посредством взаимодействия рекуперативного торможения с фрикционным тормозным моментом Tf, который получается посредством вычитания рекуперативного тормозного момента tT при координированном управлении из целевого тормозного момента Ttotal, как описано выше. Кроме того, когда ACC не приведено в действие (этап S22), на этапах S14-S16 выполняется обработка, идентичная или аналогичная обработке на фиг. 2.
Помимо этого, когда на этапе S22 выполнено определение того, что ACC приведено в действие, и на этапе S23 выполнено определение того, что педаль 11 тормоза находится в отпущенном состоянии, значение T* исполнения рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении на этапе S26. Это задание для рекуперативного тормозного момента tT при координированном управлении используется для координированного управления тормозной силой, как показано на фиг. 1.
Фиг. 6 является примерной временной диаграммой для работы в ходе непрерывного приведения в действие ACC. Как показано, до времени t1 нажатия педали тормоза, рекуперативный тормозной момент tT при координированном управлении имеет значение, идентичное значению T* исполнения рекуперативного тормозного момента. Таким образом, координированное управление тормозной силой, как показано на фиг. 1, выполняется соответствующим образом. Иными словами, координированное управление тормозной силой основано на значении T* исполнения рекуперативного тормозного момента, к которому не применена обработка фильтрации. Соответственно, могут быть уменьшены колебания ускорения в направлении вперед и назад транспортного средства, которые возникают в ходе переключения момента между рекуперативным тормозным моментом и фрикционным тормозным моментом.
Помимо этого, координированное управление тормозной силой, которое основано на значении T* исполнения рекуперативного тормозного момента, может оказывать негативное влияние на ощущение при операции торможения, как описано выше. Следовательно, когда педаль тормоза в данный момент отпущена, нет необходимости принимать во внимание ощущение при операции торможения.
Тем не менее, когда на этапе S22 выполнено определение того, что ACC приведено в действие, но на этапе S23 выполнено определение того, что педаль 11 тормоза нажимается, значение T** фильтрации рекуперативного тормозного момента задается как рекуперативный тормозной момент tT при координированном управлении на этапе S15. Это заданное значение для рекуперативного тормозного момента tT при координированном управлении используется для координированного управления тормозной силой, как показано на фиг. 1.
С началом в момент времени t1 на фиг. 6, когда педаль тормоза нажимается, рекуперативный тормозной момент tT при координированном управлении имеет значение, идентичное значению T** фильтрации рекуперативного тормозного момента после инициализации. Координированное управление тормозной силой, как показано на фиг. 1, выполняется соответствующим образом. Иными словами, координированное управление тормозной силой основано на значении T** фильтрации рекуперативного тормозного момента, к которому применена обработка фильтрации после вышеуказанной инициализации. Через эту конфигурацию, даже когда возникает внезапное варьирование в переходном процессе для значения T* исполнения рекуперативного тормозного момента, как показано в области α на фиг. 3A, варьирование рекуперативного тормозного момента tT при координированном управлении, используемого для координированного управления тормозной силой, является постепенным и небольшим, как описано выше в отношении области β на фиг. 3B. Следовательно, варьирование также является постепенным и небольшим в команде Tf управления фрикционным тормозным моментом, которая получается посредством вычитания рекуперативного тормозного момента tT при координированном управлении (значения T** фильтрации рекуперативного тормозного момента) из целевого тормозного момента Ttotal. Кроме того, приведение в действие (эффект управления дополнительным усилением от электромотора) сервомотора 13 для подачи команды Tf управления фрикционным тормозным моментом является постепенным и небольшим, что позволяет не допускать возникновения некомфортного ощущения при операции торможения для водителя.
Из вышеописанного очевидно, что, поскольку значение фильтрации рекуперативного тормозного момента, полученное посредством применения фильтрации, может быть использовано вместо рекуперативного тормозного момента, варьирование фрикционного тормозного момента может быть постепенным и небольшим, даже когда существует внезапное варьирование в переходном процессе рекуперативного тормозного момента. Следовательно, можно надлежащим образом уменьшать варьирование силы операции торможения с дополнительным усилением от электромотора, которое вызывается посредством варьирования фрикционного тормозного момента. Это позволяет не допускать некомфортного ощущения от операции торможения для водителя.
В понимании объема настоящего изобретения термин "содержащий" и его производные при использовании в данном документе имеют намерение быть допускающими поправки терминами, которые указывают присутствие заявленных признаков, элементов, компонентов, групп, целых чисел и/или этапов, но не исключают присутствие других незаявленных признаков, элементов, компонентов, групп, целых чисел и/или этапов. Вышеприведенное также применяется к словам, имеющим аналогичные значения, например, терминам "включающий в себя", "имеющий" и их производным. Кроме того, термины "часть", "узел", "секция", "деталь" или "элемент" при использовании в единственном числе могут иметь двойное значение одной части или множества частей. Термины "определять" или "считывать" и их варьирования при использовании в данном документе для того, чтобы описывать операцию или функцию, выполняемую посредством компонента, узла, устройства и т.п., включают в себя компонент, узел, устройство и т.п., которое не требует физического обнаружения или считывания, а вместо этого включает в себя определение, измерение, моделирование, прогнозирование или вычисление и т.п., чтобы выполнять операцию или функцию. Термин "выполнен с возможностью" при использовании в данном документе для того, чтобы описывать компонент, узел или часть устройства, включает в себя аппаратные средства и/или программное обеспечение, которые имеют конструкцию и/или запрограммированы так, чтобы выполнять требуемую функцию. Термины степени, такие как "практически", "почти" и "приблизительно", при использовании в данном документе означают обоснованную величину отклонения модифицированного термина, так что конечный результат существенно не изменяется.
Хотя только выбранные варианты осуществления являются предпочтительными для иллюстрирования настоящего изобретения, специалистам в данной области техники из этого раскрытия сущности должно быть очевидным, что различные изменения и модификации могут выполняться в данном документе без отступления от объема изобретения, определяемого прилагаемой формулой изобретения. Например, размер, форма, местоположение или ориентация различных компонентов могут быть изменены при необходимости и/или желании. Компоненты, которые показаны непосредственно соединенными или контактирующими друг с другом, могут иметь промежуточные структуры, расположенные между ними. Функции одного элемента могут выполняться посредством двух и наоборот. Структуры и функции одного варианта осуществления могут приспосабливаться в другом варианте осуществления. Необязательно одновременное присутствие всех преимуществ в конкретном варианте осуществления. Каждый признак, который является уникальным относительно предшествующего уровня техники, один или в комбинации с другими признаками также должен считаться отдельным описанием дополнительных вариантов осуществления изобретения заявителем, включающим в себя структурные и/или функциональные принципы, осуществленные посредством такого признака(ов). Таким образом, вышеприведенные описания вариантов осуществления согласно настоящему изобретению обеспечиваются только для иллюстрации, а не для ограничения изобретения, объем которого определяется прилагаемой формулой изобретения и ее эквивалентами.
Изобретение относится к области управления тормозной системой транспортного средства. Система управления тормозом транспортного средства содержит контроллер электромотора (3), компьютер (15, 16) управления рекуперативным торможением, главный цилиндр (12) с дополнительным усилением от электромотора, компонент (17) вычисления и компонент (14) управления. Компонент (3, 15, 16) управления рекуперативным торможением управляет рекуперативным тормозным устройством (2), чтобы обеспечивать рекуперативный тормозной момент. Компонент (12) управления фрикционным торможением управляет фрикционным тормозным устройством (19), чтобы обеспечивать фрикционный тормозной момент. Компонент (17) вычисления вычисляет значение фильтрации рекуперативного тормозного момента на основе частоты колебания рекуперативного тормозного момента. Компонент (14) управления, в течение первого состояния, управляет устройством (12, 13) управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента вместо рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент на основе операции торможения. Достигается повышение эргономичности торможения. 5 з.п. ф-лы, 6 ил.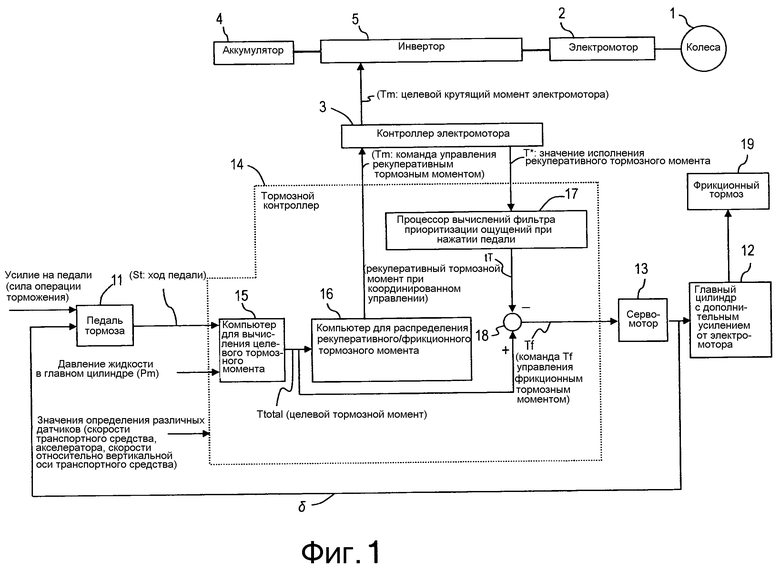
1. Система управления тормозом транспортного средства, содержащая:
компонент управления рекуперативным торможением, выполненный с возможностью управления рекуперативным тормозным устройством, для обеспечения рекуперативного тормозного момента;
компонент управления фрикционным торможением, выполненный с возможностью управления фрикционным тормозным устройством, для обеспечения фрикционного тормозного момента;
компонент вычисления, выполненный с возможностью вычисления значения фильтрации рекуперативного тормозного момента на основе частоты колебания рекуперативного тормозного момента; и
компонент управления, который выполнен с возможностью, в течение первого состояния, управления устройством управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента, а не на основе рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения.
2. Система по п.1, дополнительно содержащая компонент определения, выполненный с возможностью определения второго состояния, когда должно деактивироваться рекуперативное торможение посредством рекуперативного тормозного устройства; при этом компонент управления дополнительно выполнен с возможностью, в течение второго состояния, управления устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения.
3. Система по п.1 или 2, дополнительно содержащая компонент определения состояния предотвращения блокировки, выполненный с возможностью определения третьего состояния, в течение которого тормозной момент, прикладываемый к колесам транспортного средства, включающего в себя систему управления тормозом транспортного средства, регулируется таким образом, чтобы предотвращать блокировку тормозов колес; при этом компонент управления дополнительно выполнен с возможностью, в течение третьего состояния, управления устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент определения состояния предотвращения блокировки регулирует тормозной момент, прикладываемый к колесам, чтобы предотвращать блокировку тормозов колес.
4. Система по п.1, дополнительно содержащая компонент определения состояния маневрирования транспортного средства, выполненный с возможностью определения четвертого состояния, в течение которого регулируется тормозной момент, используемый для управления маневренностью транспортного средства для транспортного средства, включающего в себя систему управления тормозом транспортного средства; при этом компонент управления дополнительно выполнен с возможностью, в течение четвертого состояния, управления устройством управления дополнительным усилением от электромотора на основе меньшего из рекуперативного тормозного момента и значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент определения состояния маневрирования транспортного средства регулирует тормозной момент, используемый для управления маневренностью транспортного средства.
5. Система по п.1, дополнительно содержащая компонент определения состояния автоматического управления расстоянием между движущимися в потоке транспортными средствами, выполненный с возможностью определения пятого состояния, в течение которого формируется тормозной момент, используемый для автоматического управления расстоянием между движущимися в потоке транспортными средствами для транспортного средства, включающего в себя систему управления тормозом транспортного средства; при этом компонент управления дополнительно выполнен с возможностью, в течение пятого состояния, управления устройством управления дополнительным усилением от электромотора на основе рекуперативного тормозного момента вместо значения фильтрации рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, в то время как компонент определения состояния автоматического управления расстоянием между движущимися в потоке транспортными средствами определяет формирование тормозного момента, используемого для автоматического управления расстоянием между движущимися в потоке транспортными средствами.
6. Система по п.5, в которой после того, как операция торможения выполнена, компонент управления дополнительно выполнен с возможностью управления устройством управления дополнительным усилением от электромотора на основе значения фильтрации рекуперативного тормозного момента вместо рекуперативного тормозного момента, чтобы сглаживать фрикционный тормозной момент, так что рекуперативный тормозной момент и сглаженный фрикционный тормозной момент обеспечивают целевой тормозной момент, который основан на операции торможения, после того, как компонент определения состояния автоматического управления расстоянием между движущимися в потоке транспортными средствами закончил формирование тормозного момента, используемого для автоматического управления расстоянием между движущимися в потоке транспортными средствами.

