Изобретение относится к области формирования и обработки изображений, предназначено для измерения расстояний до наблюдаемых предметов, а также для определения оптических передаточных функций устройства, при помощи которых были сформированы полученные изображения, и позволяет по данным калибровки средств формирования изображений и результатам обработки изображений, полученным в процессе измерений, оценивать погрешность измерений.
Из уровня техники известны способы и устройства измерения расстояний и определения оптических передаточных функций или функций рассеяния точки, зависящих от расстояния до наблюдаемого объекта, по набору изображений посредством оценки степени размытия формируемых изображений.
Известен способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, определяют измеряемое расстояние для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями (патент США №7705970, МПК: G01C 3/08, 2010, аналог для первого варианта способа).
Особенностью указанного способа является то, что в основной его реализации должно применяться устройство, включающее для каждого из каналов формирования и фиксации изображения маску для формирования функции рассеяния точки, которая при изменении расстояния до наблюдаемого объекта практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта.
Способ измерения опирается на преобразование обращения свертки (деконволюция). Известно, что в обработке изображений обращение свертки является затратной во времени операцией или же, при применении быстрых алгоритмов инверсной фильтрации, обладает плохой устойчивостью из-за шумов, присутствующих в изображениях, а также из-за невысокой точности определения передаточной функции оптической системы. То есть могут потребоваться значительные вычислительные затраты или понижаться точность измерений и определения функций рассеяния точки. Применение специализированных масок, вращающих функцию рассеяния точки, как правило, изготавливаемых в виде дифракционных элементов, обуславливает ограниченную применимость данного способа и меньшую величину диапазона измерений.
Известен способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют их с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, определяют измеряемое расстояние для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для первого варианта способа).
Для простоты рассмотрим реализацию, когда формируется только пара изображений - первое и второе, с различными оптическими передаточными функциями для каждого изображения, соответствующими различным измеряемым расстояниям. Вместо применения обработки в области пространственных частот и оперирования с оптическими передаточными функциями в ближайшем аналоге можно добиться одинаковых результатов измерений, применяя обработку в пространственной области, с использованием функции рассеяния точки. Для простоты понимания рассмотрим ближайший аналог с выбором оптимальных функций рассеяния точки.
Для каждой области пары изображений находят оптимальную пару функций рассеяния точки среди множества пар, реализуемых устройством, а затем сопоставляют выбранной оптимальной паре функций рассеяния точки расстояние до области наблюдаемого объекта. Отыскание оптимальной пары функций рассеяния точки сводится к вычислению значений целевой функции ошибок и выбору той пары, для которой значение функции ошибок является минимальным. Ошибка для каждой пары функций рассеяния точки вычисляется в виде евклидовой нормы разности участка первого изображения размытого при помощи второй функции рассеяния точки и участка второго изображения размытого при помощи первой функции рассеяния точки. Размытие при вычислениях моделируется операцией свертки или же реализуется в виде произведения спектральных характеристик в соответствии с теоремой о свертке. Различные функции рассеяния точки формируются благодаря применению диафрагм различной формы для каждого канала.
К недостаткам указанного способа можно отнести невысокую точность, значительную ограниченность диапазона. Особенно сильно недостатки проявляются при пониженных значениях отношения сигнал/шум вплоть до неправдоподобности результатов измерений для некоторых случаев пространственного распределения яркости наблюдаемых объектов. Указанные недостатки связаны с применением удобного, но типичного функционала целевой функции в виде евклидовой нормы. При сильном размытии изображений информативными остаются только низкие частоты изображения. И, если сигнал ослаблен, то функционал оценки ошибки в данном варианте дает слишком малое отличие функций рассеяния точки, соответствующих различным расстояниям. То есть сказывается значительная зависимость значения функционала ошибки от величины входного сигнала. И небольшие влияния шума, или ограниченность точности измерения функции рассеяния точки при калибровке устройства, приводят к большим искажениям вычисления функционала ошибки и ухудшению точности измерений. На краях диапазона измеряемых расстояний точность падает наиболее значительно, так, что происходит сужение диапазона измерений.
Известен способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибрую устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, определяют измеряемое расстояние для каждой области наблюдаемого по меньшей мере одного объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями (патент США №7705970, МПК: G01C 3/08, 2010, аналог для второго варианта способа).
Особенностью указанного способа является то, что в основной его реализации должно применяться устройство, включающее для каждого из каналов формирования и фиксации изображения маску для формирования функции рассеяния точки, которая при изменении расстояния до наблюдаемого объекта практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта.
Способ измерения опирается на преобразование обращения свертки (деконволюция). Известно, что в обработке изображений обращение свертки является затратной во времени операцией или же, при применении быстрых алгоритмов инверсной фильтрации, обладает плохой устойчивостью из-за шумов, присутствующих в изображениях, а также из-за невысокой точности определения передаточной функции оптической системы. То есть могут потребоваться значительные вычислительные затраты или понижаться точность измерений и определения функций рассеяния точки. Также точность измерений может ухудшаться из-за характера пространственного спектра наблюдаемых объектов. Для ряда объектов, имеющих, например, узкополосный характер распределения пространственного спектра или малую освещенность, измерения могут быть произведены с погрешностью, сопоставимой с диапазоном измерений, причем информации о том, что измерения для данной области нельзя считать действительными не предоставляется. Таким образом, велика вероятность некорректного определения расстояния до предмета не только из-за влияния шумов или неточности калибровки устройства, но и из-за характера пространственного распределения яркости наблюдаемых предметов. В указанном аналоге отсутствуют средства определения величины погрешности, а также отсутствует возможность повышения точности измерений в указанных ситуациях. Применение специализированных масок, вращающих функцию рассеяния точки, изготавливаемых, как правило, в виде дифракционных элементов, обуславливает ограниченную применимость данного способа и меньшую величину диапазона измерений.
Известен способ получения и обработки изображений для оптических передаточных функций и измерения расстояний оптико-электронным устройством заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, определяют измеряемое расстояние для каждой области наблюдаемого по меньшей мере одного объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для второго варианта способа).
К недостаткам указанного способа можно отнести невысокую точность, значительную ограниченность диапазона, а также непостоянство и сильную зависимость точности измерений от пространственного распределения яркости наблюдаемых предметов. Особенно сильно недостатки проявляются при пониженных значениях отношения сигнал/шум вплоть до неправдоподобности результатов измерений для некоторых случаев пространственного распределения яркости. Недостатки связаны, прежде всего, с использованием пассивного способа измерений, а также с применением удобного, но типичного функционала целевой функции в виде евклидовой нормы. При сильном размытии изображений информативными остаются только низкие частоты изображения. И, если сигнал ослаблен, то функционал оценки ошибки в данном варианте дает слишком малое отличие функций рассеяния точки, соответствующих различным расстояниям. То есть сказывается значительная зависимость функционала ошибки от величины входного сигнала. И небольшие влияния шума, или ограниченность точности измерения функций рассеяния точки при калибровке устройства, приводят к большим искажениям вычисления функционала ошибки и ухудшению точности измерений. На краях диапазона измеряемых расстояний точность падает наиболее значительно, так, что происходит сужение диапазона измерений.
Пассивный принцип работы, когда результат измерений зависит непосредственно от характеристик распределения яркости наблюдаемых предметов, приводит к различной точности измерений в зависимости от распределения яркости наблюдаемых объектов. Для ряда объектов, имеющих, например, узкополосный характер распределения пространственного спектра или малую освещенность, измерения могут быть произведены с погрешностью, сопоставимой с диапазоном измерений. Так как реализации наблюдений могут быть совершенно различными, то получить обобщенную оценку точности измерений для всего многообразия реализаций проблематично. Таким образом, получается ситуация, когда точность измерений может сильно деградировать для областей изображения, но при этом наблюдатель будет трактовать данные с низкой точностью как достоверные. Таким образом, велика вероятность некорректного определения расстояния до предмета не только из-за влияния шумов или неточности калибровки устройства, но и из-за характера пространственного распределения яркости наблюдаемых предметов. В указанном аналоге отсутствуют средства определения величины погрешности, а также отсутствует возможность повышения точности измерений в указанных ситуациях.
Аналогов способа определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства не обнаружено.
Известно, что погрешность способов измерения и определения оптических передаточных функций на основе обработки пары и более изображений, формируемых с различной степенью размытия, в значительной степени зависит от уровня шума и распределения яркости наблюдаемых объектов, и не может быть определена для широкого круга реализаций наблюдений. В то же время результатом измерений является точечная оценка расстояния, часто имеющая погрешность соизмеримую с диапазоном измерений. Применение способа оценки погрешности для конкретных реализаций производимых измерений позволяет в значительной мере компенсировать указанные недостатки.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система хотя бы одного из каналов включает маску для формирования функции рассеяния точки, зависящей от расстояния до наблюдаемого объекта, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, а также блок, который определяет функции рассеяния точки и вычисляет расстояние до наблюдаемых предметов (патент США №7705970, МПК: G01C 3/08, 2010, аналог заявляемого устройства по первому варианту). В устройстве-аналоге применяются специальные маски для формирования изображений, в частности маски, из-за которых функция рассеяния точки практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта. Применение таких масок позволяет добиться улучшенного продольного разрешения измеряемых расстояний, но при этом приводит к сужению диапазона измерений, а также требует применения дорогостоящих светочувствительных детекторов изображения с низким уровнем электронных шумов. При применении указанных масок возможны реализации наблюдений, когда характер преобразования оптического излучения от наблюдаемых объектов будет схожим для различных измеряемых расстояний с различными оптическими передаточными функциями, вследствие чего возникнет ошибка измерения. Возникновение такого рода ошибок в устройстве-аналоге не детектируется и не обрабатывается, и данные измерений могут быть недостоверными.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, ближайший аналог устройства по первому варианту, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний до наблюдаемых объектов, соединенный с детекторами (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для первого варианта устройства).
В известном устройстве расстояние до предмета определяется на основании вычисления функции ошибок для набора возможных пар функций рассеяния точки каналов, и затем выбора тех функций рассеяния точки каналов, для которых ошибка является минимальной. Значения функции ошибок определяются для пар зафиксированных изображений как среднеквадратическое отклонение зафиксированных изображений, каждое из которых предварительно подвергается преобразованию-свертке с предполагаемой функцией рассеяния точки для изображения, полученное другим детектором. Данный способ является относительно простым и типичным решением вопроса дифференциации различных функций рассеяния точки, которое, однако, является недостаточно точным. Особенно сильно точность зависит от электронных шумов матричных светочувствительных детекторов, от точности калибровки устройства, от передаточных функций каналов устройства, определяемых конфигурацией устройства (взаимным расположением светочувствительных детекторов, оптических элементов и формой диафрагм каналов устройства), а также от пространственного распределения яркости наблюдаемых объектов.
Так, если отношение сигнал/шум уменьшается по сравнению с максимальным для применяемой системы, например, из-за того, что для участка изображения предметы слабо освещены или же из-за повышения уровня шумов при увеличении аналогового коэффициента усиления регистрируемого сигнала, то величина рабочего диапазона сужается. Сужение диапазона, как и ухудшение точности, вызвано сложностью выбора оптимальной пары функций рассеяния точки на краях рабочего диапазона, когда масштабы функций рассеяния точки на краях диапазона велики и одно или несколько фиксируемых изображений значительно размыты.
Для ряда объектов, имеющих, например, узкополосный характер распределения пространственного спектра или малую освещенность, измерения могут быть произведены с погрешностью, сопоставимой с диапазоном измерений, причем информации о том, что измерения для данной области нельзя считать действительными не предоставляется. Таким образом, велика вероятность некорректного определения расстояния до предмета не только из-за влияния шумов или неточности калибровки устройства, но и из-за характера пространственного распределения яркости наблюдаемых предметов. В указанном аналоге отсутствуют средства определения величины погрешности, а также отсутствует возможность повышения точности измерений в указанных ситуациях.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система хотя бы одного из каналов включает маску для формирования функции рассеяния точки, зависящей от расстояния до наблюдаемого объекта, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, а также блок, который определяет функции рассеяния точки и вычисляет расстояние до наблюдаемых предметов (патент США №7705970, МПК: G01C 3/08, 2010, аналог заявляемого устройства по второму варианту). В устройстве-аналоге применяются специальные маски для формирования изображений, в частности маски, из-за которых функция рассеяния точки практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта. Применение таких масок позволяет добиться улучшенного продольного разрешения измеряемых расстояний, но при этом приводит к сужению диапазона измерений, а также требует применения дорогостоящих светочувствительных детекторов изображения с низким уровнем электронных шумов. При применении указанных масок возможны реализации наблюдений, когда характер преобразования оптического излучения от наблюдаемых объектов будет схожим для различных измеряемых расстояний с различными оптическими передаточными функциями, вследствие чего возникнет ошибка измерения. Возникновение такого рода ошибок в устройстве-аналоге не детектируется и не обрабатывается, и данные измерений могут быть недостоверными.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, ближайший аналог устройства по второму варианту, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний до наблюдаемых объектов, соединенный с детекторами (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для второго варианта устройства).
В известном устройстве расстояние до предмета определяется на основании вычисления функции ошибок для набора возможных пар функций рассеяния точки каналов, и затем выбора тех функций рассеяния точки каналов, для которых ошибка является минимальной. Значения функции ошибок определяются для пар зафиксированных изображений как среднеквадратическое отклонение зафиксированных изображений, каждое из которых предварительно подвергается преобразованию-свертке с предполагаемой функцией рассеяния точки для изображения, полученное другим детектором. Данный способ является относительно простым и типичным решением вопроса дифференциации различных функций рассеяния точки, которое, однако, является недостаточно точным. Особенно сильно точность зависит от электронных шумов матричных светочувствительных детекторов, от точности калибровки устройства, от передаточных функций каналов устройства, определяемых конфигурацией устройства (взаимным расположением светочувствительных детекторов, оптических элементов и формой диафрагм каналов устройства), а также от пространственного распределения яркости наблюдаемых объектов.
Так, если отношение сигнал/шум уменьшается по сравнению с максимальным для применяемой системы, например, из-за того, что для участка изображения предметы слабо освещены или же из-за повышения уровня шумов при увеличении аналогового коэффициента усиления регистрируемого сигнала, то величина рабочего диапазона сужается. Сужение диапазона, как и ухудшение точности, вызвано сложностью выбора оптимальной пары функций рассеяния точки на краях рабочего диапазона, когда масштабы функций рассеяния точки на краях диапазона велики и одно или несколько фиксируемых изображений значительно размыты.
Для ряда объектов, имеющих, например, узкополосный характер распределения пространственного спектра или малую освещенность, измерения могут быть произведены с погрешностью, сопоставимой с диапазоном измерений, причем информации о том, что измерения для данной области нельзя считать действительными не предоставляется. Таким образом, велика вероятность некорректного определения расстояния до предмета не только из-за влияния шумов или неточности калибровки устройства, но и из-за характера пространственного распределения яркости наблюдаемых предметов. В указанном аналоге отсутствуют средства определения величины погрешности.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система хотя бы одного из каналов включает маску для формирования функции рассеяния точки, зависящей от расстояния до наблюдаемого объекта, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, а также блок, который определяет функции рассеяния точки и вычисляет расстояние до наблюдаемых предметов (патент США №7705970, МПК: G01C 3/08, 2010, аналог заявляемого устройства по третьему варианту). В устройстве-аналоге применяются специальные маски для формирования изображений, в частности, маски, из-за которых функция рассеяния точки практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта. Как правило, маски представляют собой дифракционные оптические элементы, проектирование и создание которых - трудоемкий и дорогостоящий процесс. Применение таких масок позволяет добиться улучшенного продольного разрешения измеряемых расстояний, но при этом приводит к сужению диапазона измерений, а также требует применения дорогостоящих светочувствительных детекторов изображения с низким уровнем электронных шумов.
Улучшение продольного разрешения достигается за счет того, что скорость изменения формы вращаемой функции рассеяния точки больше, чем в аналогичной оптической системе без применения маски. Улучшение носит локальный характер в пределах малого диапазона расстояний, за пределами которого скорость изменения формы функции рассеяния точки для систем без применения указанных масок определяется, главным образом, масштабным изменением функции рассеяния точки, при этом в системах с маской размытие значительно большее из-за большей скорости роста масштаба пятна.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, ближайший аналог устройства по третьему варианту, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний до наблюдаемых объектов, соединенный с детекторами (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для третьего варианта устройства).
В известном устройстве расстояние до предмета определяется на основании вычисления функции ошибок для набора возможных пар функций рассеяния точки каналов, и затем выбора тех функций рассеяния точки каналов, для которых ошибка является минимальной. Значения функции ошибок определяются для пар зафиксированных изображений как среднеквадратическое отклонение зафиксированных изображений, каждое из которых предварительно подвергается преобразованию-свертке с предполагаемой функцией рассеяния точки для изображения, полученное другим детектором. Данный способ является относительно простым и типичным решением вопроса дифференциации различных функций рассеяния точки, которое, однако, является недостаточно точным. Особенно сильно точность зависит от электронных шумов матричных светочувствительных детекторов, от точности калибровки устройства, от передаточных функций каналов устройства, определяемых конфигурацией устройства (взаимным расположением светочувствительных детекторов, оптических элементов и формой диафрагм каналов устройства), а также от пространственного распределения яркости наблюдаемых объектов.
Так, если отношение сигнал/шум уменьшается по сравнению с максимальным для применяемой системы, например, из-за того, что для участка изображения предметы слабо освещены или же из-за повышения уровня шумов при увеличении аналогового коэффициента усиления регистрируемого сигнала, то величина рабочего диапазона сужается. Сужение диапазона, как и ухудшение точности, вызвано сложностью выбора оптимальной пары функций рассеяния точки на краях рабочего диапазона, когда масштабы функций рассеяния точки на краях диапазона велики и одно или несколько фиксируемых изображений значительно размыты.
Установка детекторов и элементов оптической системы каналов устройства без обеспечения различных смещений светочувствительных поверхностей детекторов относительно задних фокусов оптических систем каналов приводит к тому, что масштаб функции рассеяния точки для каждого детектора изменяется одинаково, то есть синхронно. Аналогичным образом изменяется и соотношение оптических передаточных функций. При таком поведении масштабов функции рассеяния точки существует большое количество измеряемых расстояний, для которых соотношение оптических передаточных функций имеет одинаковый характер в широком диапазоне частот, даже при различной форме диафрагм каналов.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, содержащее один канал формирования и фиксации изображений, оптическая система канала включает маску для формирования функции рассеяния точки, зависящей от расстояния до наблюдаемого объекта, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, а также блок, который определяет функции рассеяния точки и вычисляет расстояние до наблюдаемых предметов (патент США №7705970, МПК: G01C 3/08, 2010, аналог заявляемого устройства по четвертому варианту). В устройстве-аналоге применяются специальные маски для формирования изображений, в частности, маски, из-за которых функция рассеяния точки практически не изменяется по форме, а лишь поворачивается на угол, зависящий от расстояния до наблюдаемого объекта. Применение таких масок позволяет добиться улучшенного продольного разрешения измеряемых расстояний, но при этом приводит к сужению диапазона измерений, а также требует применения дорогостоящих светочувствительных детекторов изображения с низким уровнем электронных шумов.
При применении указанных масок возможны реализации наблюдений, когда характер преобразования оптического излучения от наблюдаемых объектов будет схожим для различных измеряемых расстояний с различными оптическими передаточными функциями, вследствие чего возникнет ошибка измерения. Возникновение такого рода ошибок в устройстве-аналоге не детектируется и не обрабатывается, и данные измерений могут быть недостоверными.
Известно оптико-электронное устройство для измерения расстояний и определения оптических передаточных функций, ближайший аналог устройства по четвертому варианту, содержащее один канал формирования и фиксации изображений, оптическая система которого включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний до наблюдаемых объектов, соединенный с детекторами (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010, ближайший аналог для четвертого варианта устройства).
В известном устройстве расстояние до предмета определяется на основании вычисления функции ошибок для набора возможных функций рассеяния точки каналов, и затем выбора тех функций рассеяния точки каналов, для которой ошибка является минимальной. Значения функции ошибок определяются для пар зафиксированных изображений как среднеквадратическое отклонение зафиксированных изображений, каждое из которых предварительно подвергается преобразованию-свертке с предполагаемой функцией рассеяния точки для изображения, полученного другим детектором. Данный способ является относительно простым и типичным решением вопроса дифференциации различных функций рассеяния точки, которое, однако, является недостаточно точным. Особенно сильно точность зависит от электронных шумов матричных светочувствительных детекторов, от точности калибровки устройства, от передаточных функций каналов устройства, определяемых конфигурацией устройства (положением светочувствительного детектора, оптических элементов и формой диафрагм), а также от пространственного распределения яркости наблюдаемых объектов.
Так, если отношение сигнал/шум уменьшается по сравнению с максимальным для применяемой системы, например, из-за того, что для участка изображения предметы слабо освещены или же из-за повышения уровня шумов при увеличении аналогового коэффициента усиления регистрируемого сигнала, то величина рабочего диапазона сужается. Сужение диапазона, как и ухудшение точности, вызвано сложностью выбора оптимальной пары функций рассеяния точки на краях рабочего диапазона, когда масштабы функций рассеяния точки на краях диапазона велики и одно или несколько фиксируемых изображений значительно размыты.
Для ряда объектов, имеющих, например, узкополосный характер распределения пространственного спектра или малую освещенность, измерения могут быть произведены с погрешностью, сопоставимой с диапазоном измерений, причем информации о том, что измерения для данной области нельзя считать действительными не предоставляется. Таким образом, велика вероятность некорректного определения расстояния до предмета не только из-за влияния шумов или неточности калибровки устройства, но и из-за характера пространственного распределения яркости наблюдаемых предметов. В указанном аналоге отсутствуют средства определения величины погрешности, а также отсутствует возможность повышения точности измерений в указанных ситуациях.
Задачей изобретения по первому варианту является создание способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, обеспечивающего повышенную точность измерения расстояний и определения оптических передаточных функций в диапазоне измерений сравнимом или более широком, чем обеспечивается аналогичными решениями.
Технический результат предполагаемого изобретения заключается в повышении точности измерения расстояний, определения оптических передаточных функций и в расширении диапазона измерений.
Для достижения указанного выше технического результата применяют способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, определяют измеряемое расстояние для каждой области наблюдаемого по меньшей мере одного объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, согласно изобретению измеряют уровень шума детекторов изображений и сохраняют в памяти амплитуды спектральной модели распределения шумов детекторов изображения, осуществляют выбор оптимальных оптических передаточных функций для каждой рассматриваемой области изображений путем извлечения из памяти значений оптических передаточных функций для расстояний в пределах диапазона измерений, которые соответствуют положениям детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения, обработки областей изображений в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисляют значения результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбирают оптимальные оптические передаточные функции при которых указанная результирующая целевая функция принимает максимальное значение.
Измерение уровня шума детекторов изображений и сохранение в памяти амплитуд спектральной модели распределения шумов детекторов изображения, обработка областей изображений, в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисление значений результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбор оптимальных оптических передаточных функций при которых указанная результирующая целевая функция принимает максимальное значение позволяют повысить точность выбора оптимальной пары оптических передаточных функций и измерения расстояния, а также расширить диапазон измерений.
Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, когда при формировании и фиксации изображений формируют дополнительную освещенность наблюдаемых объектов, позволяет повысить точность результатов измерений для наблюдаемых объектов с малой освещенностью и для наблюдаемых объектов с монотонным распределением яркости, когда формируют дополнительную немонотонную освещенность.
Задачей изобретения по второму варианту является создание способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, обеспечивающего повышенную точность измерения расстояний и определения оптических передаточных функций.
Технический результат предлагаемого изобретения заключается в повышении точности измерения расстояний и определения оптических передаточных функций, а также в обеспечении возможности измерения расстояний для ситуаций, когда возникает неопределенность измерений из-за того, что пространственный спектр наблюдаемых предметов искажается оптическими передаточными функциями, соотношения амплитуд которых в диапазоне частот наблюдаемых предметов имеет характер схожий с соотношением амплитуд оптических передаточных функций, характерных для расстояний до предметов, отличных от действительного.
Для достижения указанного выше технического результата применяют способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каждого канала формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, соответствующие положениям детекторов, оптических элементов и формам диафрагм при которых формируются и фиксируются изображения, определяют измеряемое расстояние для каждой области наблюдаемого по меньшей мере одного объекта, которым соответствуют области изображений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние, при котором устройство обладает выбранными оптимальными оптических передаточных функций, согласно изобретению измеряют уровень шума детекторов изображений и сохраняют в памяти амплитуды спектральной модели распределения шумов детекторов изображения, осуществляют выбор оптимальных искажающих оптических передаточных функций для каждой рассматриваемой области изображений путем извлечения из памяти значений оптических передаточных функций для расстояний в пределах диапазона измерений, которые соответствуют положениям детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения, обработки областей изображений, в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисляют значения результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбирают оптимальные оптические передаточные функции при которых указанная результирующая целевая функция принимает максимальное значение, находят диапазон возможного положения наблюдаемого объекта для каждой рассматриваемой области изображений, затем исправляют измеренное расстояние, заменяют оптимальные оптические передаточные функции, а также определяют погрешность измерений, если погрешность измерений больше допустимой, перемещают один или более оптических элементов и/или по меньшей мере один детектор и/или изменяют форму по меньшей мере одной диафрагмы на величину, которая определяется на основе состава пространственного спектра участков зафиксированных изображений и данных предварительной калибровки устройства и позволяет уменьшить погрешность измерений, а затем производят один или серию циклов измерения расстояний.
Измерение уровня шума детекторов изображений и сохранение в памяти амплитуд спектральной модели распределения шумов детекторов изображения, обработка областей изображений, в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисляют значения результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбирают оптимальные оптические передаточные функции, при которых указанная результирующая целевая функция принимает максимальное значение, нахождение диапазона возможного положения наблюдаемого объекта для каждой рассматриваемой области изображений, исправление измеренного расстояния, замена оптимальных оптических передаточных функций, а также определение погрешности измерений, и, если погрешность измерений больше допустимой, последующее перемещение одного или более элемента оптической системы вдоль оптической оси,
а также изменение формы по меньшей мере одной диафрагмы,
а также перемещение по меньшей мере одного детектора,
а также перемещение одного или более элементов оптической системы вдоль оптической оси и по меньшей мере одного детектора,
а также перемещение одного или более элементов оптической системы и изменение формы по меньшей мере одной диафрагмы,
а также перемещение по меньшей мере одного детектора и изменение формы по меньшей мере одной диафрагмы,
а также перемещение одного или более элементов оптической системы и по меньшей мере одного детектора и изменение формы по меньшей мере одной диафрагмы,
на величину, которая определяется по результатам анализа состава пространственного спектра участков зафиксированных изображений с использованием данных предварительной калибровки устройства таким образом, чтобы уменьшить погрешность измерений, и последующее проведение дополнительно одного или серии циклов измерения расстояний, позволяют повысить точность измерений, а также обеспечить возможность измерения расстояний для ситуаций, когда возникает неопределенность измерений из-за того, что пространственный спектр наблюдаемых предметов искажается оптическими передаточными функциями, соотношения амплитуд которых в диапазоне частот наблюдаемых предметов имеет характер схожий с соотношением амплитуд оптических передаточных функций, характерных для расстояний до предметов, отличных от действительного.
Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, когда при формировании и фиксации изображений формируют дополнительную освещенность наблюдаемых объектов, позволяет повысить точность результатов измерений для наблюдаемых объектов с малой освещенностью и для наблюдаемых объектов с монотонным распределением яркости, когда формируют дополнительную немонотонную освещенность.
Задачей изобретения является создание способа определения погрешности измерений и исправления результатов проведенных измерений оптико-электронного устройства для повышения точности и обеспечения достоверности результатов при осуществлении способа измерения расстояний и определения функций рассеяния точки посредством получения и обработки пары и более изображений с различной степенью размытия.
Техническими результатами предполагаемого изобретения являются предоставление более точных конечных результатов измерений и обеспечение достоверности измерений. Исправление точечной оценки измерений на основе статистических характеристик работы устройства позволяет предоставить уточненные результаты измерений с меньшей абсолютной погрешностью проведенных измерений. Достоверность обеспечивается предоставлением исчерпывающей информации о результатах измерений с малой вероятностью ее ошибочности, а именно представлением в дополнение к исправленным результатам измерения оценки величины погрешности.
Для достижения указанного выше технического результата применяют способ определения погрешности измерений и исправления результатов проведенных измерений оптико-электронного устройства, заключающийся в том, что по результатам обработки пары и более изображений, сформированных с различной степенью размытия для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, осуществляют выбор оптимальных оптических передаточных функций каналов формирования и фиксации изображений из оптических передаточных функций для расстояний в пределах диапазона измерений, при которых результирующая целевая функция оптимизации имеет глобальный экстремум, определяют измеряемое расстояние как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, где значения оптических передаточных функций измеряются при проведении предварительной калибровки и сохраняются в памяти, для каждой рассматриваемой области находят диапазон возможного положения наблюдаемых объектов путем сравнения целевых функций различных сочетаний пар каналов, полученных при измерениях, со значениями среднестатистических целевых функций пар каналов, уменьшенных на величину, пропорциональную среднеквадратическим отклонениям значений целевых функций для диапазона измерений, полученными при калибровке устройства для уровня шума, соответствующего шуму детекторов при фиксации изображений, затем исправляют измеренное расстояние, заменяя его на расстояние, соответствующее середине диапазона возможного положения наблюдаемого объекта, и заменяют оптимальные оптических передаточных функций на оптических передаточных функций, которыми устройство обладает при данном расстоянии, а также определяют погрешность измерений как половину диапазона возможного положения наблюдаемого объекта дополнительно предварительно калибруют устройство для различных уровней шума детекторов изображений, используя в качестве калибровочных мишеней задаваемые распределения яркости расположенные на известном расстоянии от устройства посредством нахождения целевых функций и вычисления по ним значений среднестатистических целевых функций и среднеквадратических отклонений целевых функций от среднестатистических целевых функций пар каналов для диапазона измерений.
В основу изобретения по первому варианту поставлена задача создания оптико-электронного устройства для измерения, при применении которого обеспечивается измерение расстояний с повышенной точностью в диапазоне измерений сравнимом или более широком, чем обеспечивается аналогичными решениями.
Технический результат, на достижение которого направлено заявленное изобретение оптико-электронное устройство для измерения расстояний по первому варианту, состоит в повышении точности в широком диапазоне измерений. Дополнительный технический результат состоит в обеспечении достоверности результатов измерений.
Для достижения указанного выше технического результата оптико-электронное устройство для измерения расстояний содержит не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для фиксации изображений, блок оценки расстояний, соединенный с детекторами, согласно изобретению один или более элементов оптической системы установлены с возможностью перемещения вдоль оптической оси и/или по меньшей мере один детектор установлен с возможностью перемещения вдоль оптической оси и/или вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала отличного от соответствующих смещений детекторов других каналов и/или по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы, а устройство снабжено блоком оценки точности и корректировки результатов измерений, соединенным с блоком оценки расстояний, и блоком регулировки взаимного смещения детекторов, положений элементов оптической системы и форм диафрагм соединенным с блоком оценки расстояний и блоком оценки точности и корректировки результатов измерений.
Установка
одного или более элемента оптической системы с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также по меньшей мере одного детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также по меньшей мере одного детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также по меньшей мере одного детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
позволяют требуемым образом изменять оптические передаточные функции одного или нескольких каналов устройства.
Снабжение устройства блоком оценки погрешности и исправления измерений, соединенным с блоком оценки расстояний, позволяет на основе статистических данных оценить диапазон возможного положения наблюдаемого объекта, определить погрешность измерений, выявить области с недопустимой погрешностью, а также исправить результаты измерений, полученные в блоке оценки расстояний, замещая результаты измерений более вероятными значениями. Таким образом, повышается точность и обеспечивается достоверность данных измерений.
Снабжение устройства блоком регулировки взаимного смещения детекторов, положений элементов оптической системы и форм диафрагм, соединенным с блоком оценки расстояний и блоком оценки погрешности и исправления измерений позволяет посредством учета состава пространственного спектра полученных изображений и информации о диапазоне возможного положения наблюдаемого объекта, определить, каким образом необходимо изменить конфигурацию устройства для обеспечения оптических передаточных функций, которые проще различить для различных расстояний до наблюдаемого объекта, когда объект находится в пределах диапазона возможного положения. Новые оптические передаточные функции позволяют провести новый цикл измерений с повышенной точностью.
Оси полей зрения каналов формирования и фиксации изображений могут не совпадать друг с другом. При этом оси могут быть или параллельны друг другу или же установлены с некоторым известным углом схождения осей - углом конвергенции. Такое выполнение осей полей зрения каналов формирования и фиксации изображений является частным случаем реализации устройства и используется при измерении расстояний когда на участках изображений эффект параллакса отсутствует или компенсируется при осуществлении обработки изображений. Однако такая система может иметь ограниченную применимость при измерении расстояний для близкорасположенных или значительно удаленных предметов.
Устройство может включать дополнительно по меньшей мере один светоделитель. Включение в устройство дополнительно по меньшей мере одного светоделителя является частным случаем выполнения устройства.
Устройство может быть снабжено источником оптического излучения, предназначенным для формирования освещения наблюдаемого объекта. Снабжение устройства источником оптического излучения позволяет создать дополнительное освещение наблюдаемого объекта в случае его слабой освещенности или же создать немонотонную освещенность, если распределение яркости наблюдаемого объекта монотонное.
В основу изобретения по второму варианту поставлена задача создания оптико-электронного устройства для измерения, при применении которого обеспечивается измерение расстояний с повышенной точностью в диапазоне измерений, сравнимом или более широком, чем обеспечивается аналогичными решениями.
Технический результат, на достижение которого направлено заявленное изобретение оптико-электронное устройство для измерения расстояний по второму варианту, состоит в повышении точности в широком диапазоне измерений. Дополнительный технический результат состоит в обеспечении достоверности результатов измерений.
Для достижения указанного выше технического результата оптико-электронное устройство для измерения расстояний содержит не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для фиксации изображений, блок оценки расстояний, соединенный с детекторами, согласно изобретению один или более элементов оптической системы и/или по меньшей мере один детектор установлены с обеспечением смешения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов, а устройство снабжено блоком оценки точности и корректировки результатов измерений, соединенным с блоком оценки расстояний.
Установка
одного или более элементов оптической системы с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы и по меньшей мере одного детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также по меньшей мере одного детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов, позволяют обеспечить различие изменения масштабов функций рассеяния точки для различных каналов. Различие обеспечивается даже для каналов с идентичными оптическими системами с одинаковыми диафрагмами. Так как в широком диапазоне измерений определяющим является изменение оптических передаточных функций вследствие изменения функции рассеяния точки в масштабе, то обеспечение различного изменения масштабов функций рассеяния точки для различных каналов позволяет повысить точность различения функций рассеяния точки или оптических передаточных функций для различных положений, а следовательно, повысить точность измерений.
Снабжение устройства блоком оценки погрешности и исправления измерений, соединенным с блоком оценки расстояний, позволяет на основе статистических данных оценить диапазон возможного положения наблюдаемого объекта, определить погрешность измерений, выявить области с недопустимой погрешностью, а также исправить результаты измерений, полученные в блоке оценки расстояний, замещая результаты измерений более вероятными значениями. Таким образом, повышается точность и обеспечивается достоверность данных измерений.
Оси полей зрения каналов формирования и фиксации изображений могут не совпадать друг с другом. При этом оси могут быть или параллельны друг другу или же установлены с некоторым известным углом схождения осей - углом конвергенции. Такое выполнение осей полей зрения каналов формирования и фиксации изображений является частным случаем реализации устройства и используется при измерении расстояний, когда на участках изображений эффект параллакса отсутствует или компенсируется при осуществлении обработки изображений. Однако такая система может иметь ограниченную применимость при измерении расстояний для близкорасположенных или значительно удаленных предметов.
Устройство может включать дополнительно по меньшей мере один светоделитель. Включение в устройство дополнительно по меньшей мере одного светоделителя является частным случаем выполнения устройства.
Устройство может быть снабжено источником оптического излучения, предназначенным для формирования освещения наблюдаемого объекта. Снабжение устройства источником оптического излучения позволяет создать дополнительное освещение наблюдаемого объекта в случае его слабой освещенности или же создать немонотонную освещенность, если распределение яркости наблюдаемого объекта монотонное.
В основу изобретения по третьему варианту поставлена задача создания оптико-электронного устройства для измерения, при применении которого обеспечивается измерение расстояний с повышенной точностью в диапазоне измерений, сравнимом или более широком, чем обеспечивается аналогичными решениями.
Технический результат, на достижение которого направлено заявленное изобретение оптико-электронное устройство для измерения расстояний по третьему варианту, состоит в повышении точности в широком диапазоне измерений. Для достижения указанного выше технического результата оптико-электронное устройство для измерения расстояний содержит не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для фиксации изображений, блок оценки расстояний, соединенный с детекторами, согласно изобретению один или более элементов оптической системы и/или по меньшей мере один детектор установлены с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала отличного от соответствующих смещений детекторов других каналов.
Установка
одного или более элементов оптической системы с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также одного или более элементов оптической системы и по меньшей мере одного детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала отличного от соответствующих смещений детекторов других каналов, а также по меньшей мере одного детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов, позволяют обеспечить различие изменения масштабов функций рассеяния точки для различных каналов. Различие обеспечивается даже для каналов с идентичными оптическими системами с одинаковыми диафрагмами. Так как в широком диапазоне измерений определяющим является изменение оптических передаточных функций вследствие изменения функции рассеяния точки в масштабе, то обеспечение различного изменения масштабов функций рассеяния точки для различных каналов позволяет повысить точность различения функций рассеяния точки или оптических передаточных функций для различных положений, а, следовательно, повысить точность измерений.
Оси полей зрения каналов формирования и фиксации изображений могут не совпадать друг с другом. При этом оси могут быть или параллельны друг другу или же установлены с некоторым известным углом схождения осей - углом конвергенции. Такое выполнение осей полей зрения каналов формирования и фиксации изображений является частным случаем реализации устройства и используется при измерении расстояний когда на участках изображений эффект параллакса отсутствует или компенсируется при осуществлении обработки изображений. Однако такая система может иметь ограниченную применимость при измерении расстояний для близкорасположенных или значительно удаленных предметов.
Устройство может включать дополнительно по меньшей мере один светоделитель. Включение в устройство дополнительно по меньшей мере одного светоделителя является частным случаем выполнения устройства.
Устройство может быть снабжено источником оптического излучения, предназначенным для формирования освещения наблюдаемого объекта. Снабжение устройства источником оптического излучения позволяет создать дополнительное освещение наблюдаемого объекта в случае его слабой освещенности или же создать немонотонную освещенность, если распределение яркости наблюдаемого объекта монотонное.
В основу изобретения по четвертому варианту поставлена задача создания оптико-электронного устройства для измерения, при применении которого обеспечивается измерение расстояний с повышенной точностью в диапазоне измерений, сравнимом или более широком, чем обеспечивается аналогичными решениями.
Технический результат, на достижение которого направлено заявленное изобретение оптико-электронное устройство для измерения расстояний по четвертому варианту, состоит в повышении точности в широком диапазоне измерений. Дополнительный технический результат состоит в обеспечении достоверности результатов измерений.
Для достижения указанного выше технического результата оптико-электронное устройство для измерения расстояний содержит один канал формирования и фиксации изображений, оптическая система которого включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для фиксации изображений, блок оценки расстояний, соединенный с детектором, согласно изобретению один или более элементов оптической системы установлены с возможностью перемещения вдоль оптической оси и/или по меньшей мере один детектор установлен с возможностью перемещения вдоль оптической оси и/или вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и/или по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы, а устройство снабжено блоком оценки точности и корректировки результатов измерений, соединенным с блоком оценки расстояний, и блоком регулировки смещения детектора, положений элементов оптической системы и форм диафрагм соединенным с блоком оценки расстояний и блоком оценки точности и корректировки результатов измерений.
Установка
одного или более элемента оптической системы с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью перемещения вдоль оптической оси и детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также одного или более элементов оптической системы с возможностью перемещения вдоль оптической оси и детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также детектора с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также детектора с возможностью перемещения вдоль оптической оси с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала, отличного от соответствующих смещений детекторов других каналов,
а также детектора с возможностью перемещения вдоль оптической оси и вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы,
а также детектора с возможностью вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
а также по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы,
позволяют требуемым образом изменять оптические передаточные функции устройства.
Снабжение устройства блоком оценки погрешности и исправления измерений, соединенным с блоком оценки расстояний, позволяет на основе статистических данных оценить диапазон возможного положения наблюдаемого объекта, определить погрешность измерений, выявить области с недопустимой погрешностью, а также исправить результаты измерений, полученные в блоке оценки расстояний, замещая результаты измерений более вероятными значениями. Таким образом, повышается точность и обеспечивается достоверность данных измерений.
Снабжение устройства блоком регулировки смещения детектора, положений элементов оптической системы и форм диафрагм, соединенным с блоком оценки расстояний и блоком оценки погрешности и исправления измерений позволяет посредством учета состава пространственного спектра полученных изображений и информации о диапазоне возможного положения наблюдаемого объекта, определить, каким образом необходимо изменить конфигурацию устройства для обеспечения оптических передаточных функций, которые проще различить для различных расстояний до наблюдаемого объекта, когда объект находится в пределах диапазона возможного положения. Новые оптические передаточные функции позволяют провести новый цикл измерений с повышенной точностью
Устройство может быть снабжено источником оптического излучения, предназначенным для формирования освещения наблюдаемого объекта. Снабжение устройства источником оптического излучения позволяет создать дополнительное освещение наблюдаемого объекта в случае его слабой освещенности или же создать немонотонную освещенность, если распределение яркости наблюдаемого объекта монотонное.
На фиг.1 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с общим полем зрения с регулировкой положения элементов оптической системы, положения детекторов и формы диафрагм (первый вариант заявляемого устройства); на фиг.2 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с раздельными полями зрения с регулировкой положения элементов оптической системы, положения детекторов и формы диафрагм (первый вариант заявляемого устройства); на фиг.3 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с общим полем зрения с блоком оценки погрешности и исправления результатов измерений (второй вариант заявляемого устройства); на фиг.4 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с раздельными полями зрения с блоком оценки погрешности и исправления результатов измерений (второй вариант заявляемого устройства); на фиг.5 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с общим полем зрения (третий вариант заявляемого устройства); на фиг.6 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с двумя каналами с раздельными полями зрения (третий вариант заявляемого устройства); на фиг.7 изображена схема оптико-электронного устройства для определения оптических передаточных функций и измерения расстояний с последовательной фиксацией изображений(четвертый вариант заявляемого устройства); на фиг.8 приведена схема двухканального устройства с общим полем зрения для объяснения примеров применения способов; на графиках фиг.9-а, 9-б, 9-в приведены оптические передаточные функции пары каналов устройства, изображенного на фиг.8, для различных измеряемых расстояний при положениях детекторов каналов 







Оптико-электронное устройство для измерения расстояний по первому варианту содержит не менее двух каналов 1 формирования изображений, оптическая система каждого из каналов 1 включает в качестве ее элементов 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также по меньшей мере одну диафрагму 3. Матричный светочувствительный детектор 4 каждого канала 1 формирования и фиксации изображений осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4.
Возможно различное выполнение многоканального оптико-электронного устройства с регулировкой положения элементов оптической системы, положения детекторов и формы диафрагм (содержит не менее двух каналов).
При выполнении каналов 1 с общей частью оптической системы (Фиг.1) устройство дополнительно включает в качестве элементов 2 оптической системы по меньшей мере один светоделитель 12, который может выполнять не только функцию разделения светового излучения по каналам, но также и функцию диафрагмы. После светоделителя 12 могут располагаться элементы 2 оптической системы и диафрагмы 3 для отдельных каналов 1 или одна диафрагма 3 общая для отдельных каналов 1 совпадающая со светоделителем 12.
При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 оси полей зрения каналов 1 выполнены параллельно и не совпадают друг с другом (Фиг.2). Оси полей зрения могут не быть параллельными, а образовывать угол конвергенции. Данное устройство используется при измерении расстояний, когда на изображениях отсутствует эффект параллакса или компенсируется с помощью алгоритмов обработки изображений.
Во всех многоканальных устройствах один или более элементов 2 оптической системы установлены с возможностью перемещения вдоль оптической оси и/или по меньшей мере один матричный светочувствительный детектор 4 установлен с возможностью перемещения вдоль оптической оси или вращения вокруг точки А пересечения оптической оси со светочувствительной поверхностью матричного светочувствительного детектора 4 с обеспечением смещения светочувствительной поверхности матричного светочувствительного детектора относительно заднего фокуса F' оптической системы отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1 и/или по меньшей мере одна диафрагма 3 выполнена с возможностью изменения ее формы. Устройство снабжено блоком 6 оценки точности измерений, соединенным с блоком 5 оценки расстояний, и блоком 7 регулировки взаимного смещения детекторов, положений элементов оптической системы и форм диафрагм соединенным с блоком 5 оценки расстояний и блоком 6 оценки точности измерений. Имеются узлы 8 перемещения элементов 2 оптической системы, узлы 9 перемещения и поворота матричных светочувствительных детекторов 4 и узлы 13 управления формой диафрагмы.
Устройство может быть снабжено источником 10 оптического излучения, предназначенным для формирования освещения наблюдаемого объекта 11.
Наблюдаемый объект 11 может быть один или их может быть несколько.
Оптико-электронное устройство для измерения расстояний по второму варианту содержит не менее двух каналов 1 формирования изображений, оптическая система каждого из каналов 1 включает в качестве ее элементов 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также по меньшей мере одну диафрагму 3. Матричный светочувствительный детектор 4 каждого канала 1 формирования и фиксации изображений осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4.
Возможно различное выполнение многоканального оптико-электронного устройства с блоком оценки погрешности и исправления результатов измерений (содержит не менее двух каналов). При выполнении каналов 1 с общей частью оптической системы (Фиг.3) устройство дополнительно включает в качестве элементов 2 оптической системы по меньшей мере один светоделитель 12, который может выполнять не только функцию разделения светового излучения по каналам, но также и функцию диафрагмы. После светоделителя 12 могут располагаться элементы 2 оптической системы и диафрагмы 3 для отдельных каналов 1. При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 оси полей зрения каналов 1 выполнены параллельно и не совпадают друг с другом (Фиг.4). Оси полей зрения могут не быть параллельными, а образовывать угол конвергенции. Данное устройство используется при измерении расстояний, когда на изображениях отсутствует эффект параллакса или компенсируется с помощью алгоритмов обработки изображений.
Во всех многоканальных устройствах один или более элементов 2 оптической системы и/или по меньшей мере один матричный светочувствительный детектор 4 установлены с обеспечением смещения светочувствительной поверхности матричного светочувствительного детектора 4 относительно заднего фокуса F' оптической системы отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1. Устройство снабжено блоком 6 оценки точности измерений, соединенным с блоком 5 оценки расстояний.
Устройство может быть снабжено источником 10 оптического излучения, предназначенным для формирования освещения наблюдаемого объекта 11.
Наблюдаемый объект 11 может быть один или их может быть несколько.
Оптико-электронное устройство для измерения расстояний по третьему варианту содержит не менее двух каналов 1 формирования изображений, оптическая система каждого из каналов 1 включает в качестве ее элементов 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также по меньшей мере одну диафрагму 3. Матричный светочувствительный детектор 4 каждого канала 1 формирования и фиксации изображений осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4.
Возможно различное выполнение многоканального оптико-электронного устройства с двумя каналами. При выполнении каналов 1 с общей частью оптической системы (Фиг.5) устройство может дополнительно включать в качестве элементов 2 оптической системы по меньшей мере один светоделитель 12, который может выполнять не только функцию разделения светового излучения по каналам, но также и функцию диафрагмы. После светоделителя 12 могут располагаться элементы 2 оптической системы и диафрагмы 3 для отдельных каналов 1. При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 оси полей зрения каналов 1 выполнены параллельно и не совпадают друг с другом (Фиг.6). Оси полей зрения могут не быть параллельными, а образовывать угол конвергенции. Данное устройство используется при измерении расстояний, когда на изображениях отсутствует эффект параллакса или компенсируется с помощью алгоритмов обработки изображений.
Во всех многоканальных устройствах один или более элементов 2 оптической системы и/или по меньшей мере один матричный светочувствительный детектор 4 установлены с обеспечением смещения светочувствительной поверхности матричного светочувствительного детектора 4 относительно заднего фокуса F' оптической системы отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1.
Устройство может быть снабжено источником 10 оптического излучения, предназначенным для формирования освещения наблюдаемого объекта 11.
Наблюдаемый объект 11 может быть один или их может быть несколько.
Оптико-электронное устройство для измерения расстояний по четвертому варианту (Фиг.7) содержит один канал 1 формирования и фиксации изображений, оптическая система которого включает в качестве ее элементов 2, например линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также диафрагму 3. Матричный светочувствительный детектор 4 каждого канала 1 осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4.
Один или более элементов 2 оптической системы установлены с возможностью перемещения вдоль оптической оси и/или по меньшей мере один матричный светочувствительный детектор 4 установлен с возможностью перемещения вдоль оптической оси или вращения вокруг точки пересечения А оптической оси со светочувствительной поверхностью матричного светочувствительного детектора 4 с обеспечением различной величины смещения светочувствительной поверхности матричного светочувствительного детектора 4 относительно заднего фокуса F' оптической системы и/или по меньшей мере одна диафрагма 3 выполнена с возможностью изменения ее формы.
Устройство снабжено блоком 6 оценки точности измерений, соединенным с блоком 5 оценки расстояний, и блоком 7 регулировки взаимного смещения детекторов, положений элементов оптической систем и форм диафрагм соединенным с блоком 5 оценки расстояний и блоком 6 оценки точности измерений.
Устройство может быть снабжено источником 10 оптического излучения, предназначенным для формирования освещения наблюдаемого объекта 11.
Наблюдаемый объект 11 может быть один или их может быть несколько.
Оптико-электронное устройство для измерения расстояний по первому варианту работает следующим образом.
Оптическое излучение исходит от наблюдаемых объектов 11. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов 11, а также оптическое излучение, проходящее сквозь наблюдаемые объекты 11. Оптическая система каждого из каналов 1 фокусирует излучение от наблюдаемых объектов в плоскостях фокусировки и формирует изображение наблюдаемых объектов 11.
При выполнении каналов 1 с общей частью оптической системы пучки лучей проходят через элементы 2 оптической системы и разделяются светоделителем 12. Далее диафрагма 3 осуществляет ограничение оптического излучения. Диафрагма может быть общей для каналов устройства и располагаться перед светоделителем.
При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 пучки лучей проходят через элементы 2 оптической системы и диафрагмы 3 осуществляют ограничение оптического излучения.
Оптической системой формируются изображения наблюдаемых объектов на матричных светочувствительных детекторах 4, которые преобразуют оптическое излучение в электрический сигнал.
С помощью узлов 8 перемещения элементов оптической системы перемещают один или более элементов 2 оптической системы вдоль оптической оси и/или с помощью узлов 9 перемещения и поворота матричных светочувствительных детекторов перемещают по меньшей мере один матричный светочувствительный детектор 4 вдоль оптической оси или вращают вокруг точки А пересечения оптической оси со светочувствительной поверхностью матричного светочувствительного детектора 4 с обеспечением смещения светочувствительной поверхности матричного светочувствительно детектора 4 относительно заднего фокуса F' оптической системы одного канала 1 отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1 и/или с помощью узлов 9 управления формой диафрагмы изменяют форму по меньшей мере одной диафрагмы 3, что позволяет сформировать изображения с различной степенью размытия, определяемой в первую очередь масштабами функции размытия точки. Если различное смещение светочувствительной поверхности детектора относительно заднего фокуса оптической системы одного канала от соответствующих смещений детекторов других каналов обеспечивается наклоном детекторов, то допускается наличие зоны с одинаковым смещением, которая представляет собой область, близлежащую к линии, образованной пересечением светочувствительных поверхностей детекторов.
Электрический сигнал преобразуется или непосредственно с помощью матричного светочувствительного детектора 4 или с помощью дополнительных аналогово-цифровых преобразователей в поток цифровых данных - цифровые изображения.
Формирование и фиксация двух и более цифровых изображений осуществляется параллельно или последовательно.
Цифровые изображения передаются в блок 5 оценки расстояний, который осуществляет обработку изображений и измеряет расстояние. Измерение расстояний осуществляется посредством определения оптических передаточных функций каналов 1 для различных областей изображения, которым соответствуют различные области поля зрения устройства. Промежуточные результаты работы блока 5 оценки расстояний и непосредственно оценки измеряемых расстояний передаются в блок 6 оценки точности измерений. На основе этих данных блок 6 оценки точности измерений определяет точность проведенных измерений для каждой области измерений. Результаты оценки точности могут быть переданы потребителю результатов измерений, а также в блок 7 регулировки или в блок 5 оценки расстояний для их дальнейшей переработки и/или учета при следующем цикле измерений. Например, данные о точности проведенных измерений могут использоваться потребителем непосредственно при анализе результатов измерений, или же, в блоке 5 оценки расстояний может осуществляться отслеживание изменения результатов измерения и оценки точности во времени. Блок 7 регулировки осуществляет управлением устройством на основании данных о точности проведенных измерений, передавая управляющие сигналы узлам 8 перемещения элементов 2 оптической системы, узлам 9 перемещения и поворота матричных светочувствительных детекторов 4 и узлам 13 управления формой диафрагм 3, осуществляя перемещение элементов 2 оптической системы, перемещение и поворот матричных светочувствительных детекторов 4 и изменение формы диафрагм 3.
В случае недостаточной освещенности наблюдаемых объектов 11 включают источник 10 оптического излучения, который изменяет освещенность наблюдаемых объектов.
Оптико-электронное устройство для измерения расстояний по второму варианту работает следующим образом.
Оптическое излучение исходит от наблюдаемых объектов 11. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов 11, а также оптическое излучение, проходящее сквозь наблюдаемые объекты 11. Оптическая система каждого из каналов 1 фокусирует излучение от наблюдаемых объектов в плоскостях фокусировки и формирует изображение наблюдаемых объектов 11.
При выполнении каналов 1 с общей частью оптической системы пучки лучей проходят через элементы 2 оптической системы и разделяются светоделителем 12. Далее диафрагма 3 осуществляет ограничение оптического излучения. Диафрагма может быть общей для каналов устройства и располагаться перед светоделителем.
При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 пучки лучей проходят через элементы 2 оптической системы и диафрагмы 3 осуществляют ограничение оптического излучения.
Оптической системой формируются изображения наблюдаемых объектов на матричных светочувствительных детекторах 4, которые преобразуют оптическое излучение в электрический сигнал.
Один или более элементов 2 оптической системы и/или по меньшей мере один матричный светочувствительный детектор 4 установлены перед началом работы с обеспечением смещения светочувствительной поверхности матричного светочувствительного детектора 4 относительно заднего фокуса F' оптической системы, отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1, что позволяет сформировать изображения с различной степенью размытия, определяемой в первую очередь масштабами функции размытия точки.
Электрический сигнал преобразуется или непосредственно с помощью матричного светочувствительного детектора 4 или с помощью дополнительных аналогово-цифровых преобразователей в поток цифровых данных - цифровые изображения.
Формирование и фиксация двух и более цифровых изображений осуществляется параллельно или последовательно.
Цифровые изображения передаются в блок 5 оценки расстояний, который осуществляет обработку изображений и измеряет расстояние. Измерение расстояний осуществляется посредством определения оптических передаточных функций каналов 1 для различных областей изображения, которым соответствуют различные области поля зрения устройства. Промежуточные результаты работы блока 5 оценки расстояний и непосредственно оценки измеряемых расстояний передаются в блок 6 оценки точности измерений. На основе этих данных блок 6 оценки точности измерений определяет точность проведенных измерений для каждой области измерений. Результаты оценки точности могут быть переданы потребителю результатов измерений, а также в блок 5 оценки расстояний для их дальнейшей переработки и/или учета при следующем цикле измерений. Например, данные о точности проведенных измерений могут использоваться потребителем непосредственно при анализе результатов измерений, или же, в блоке 5 оценки расстояний может осуществляться отслеживание изменения результатов измерения и оценки точности во времени.
В случае недостаточной освещенности наблюдаемых объектов 11 включают источник 10 оптического излучения, который изменяет освещенность наблюдаемых объектов.
Оптико-электронное устройство для измерения расстояний по третьему варианту работает следующим образом.
Оптическое излучение исходит от наблюдаемых объектов 11. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов 11, а также оптическое излучение, проходящее сквозь наблюдаемые объекты 11. Оптическая система каждого из каналов 1 фокусирует излучение от наблюдаемых объектов в плоскостях фокусировки и формирует изображение наблюдаемых объектов 11.
При выполнении каналов 1 с общей частью оптической системы пучки лучей проходят через элементы 2 оптической системы и разделяются светоделителем 12. Далее диафрагма 3 осуществляет ограничение оптического излучения. Диафрагма может быть общей для каналов устройства и располагаться перед светоделителем.
При выполнении каналов 1 с отдельными оптическими системами для каждого матричного светочувствительного детектора 4 пучки лучей проходят через элементы 2 оптической системы и диафрагмы 3 осуществляют ограничение оптического излучения.
Оптической системой формируются изображения наблюдаемых объектов на матричных светочувствительных детекторах 4, которые преобразуют оптическое излучение в электрический сигнал.
Один или более элементов 2 оптической системы и/или по меньшей мере один матричный светочувствительный детектор 4 установлены перед началом работы с обеспечением смещения светочувствительной поверхности матричного светочувствительного детектора 4 относительно заднего фокуса F' оптической системы, отличного от соответствующих смещений матричных светочувствительных детекторов 4 других каналов 1, что позволяет сформировать изображения с различной степенью размытия, определяемой в первую очередь масштабами функции размытия точки.
Электрический сигнал преобразуется или непосредственно с помощью матричного светочувствительного детектора 4 или с помощью дополнительных аналогово-цифровых преобразователей в поток цифровых данных - цифровые изображения.
Формирование и фиксация двух и более цифровых изображений осуществляется параллельно или последовательно.
Цифровые изображения передаются в блок 5 оценки расстояний, который осуществляет обработку изображений и измеряет расстояние. Измерение расстояний осуществляется посредством определения оптических передаточных функций каналов 1 для различных областей изображения, которым соответствуют различные области поля зрения устройства. Помимо данных измерений из блока 5 оценки расстояний потребителю могут быть переданы промежуточные результаты обработки изображений для их последующего анализа.
В случае недостаточной освещенности наблюдаемых объектов 11 включают источник 10 оптического излучения, который изменяет освещенность наблюдаемых объектов.
Оптико-электронное устройство для измерения расстояний по четвертому варианту работает следующим образом.
Оптическое излучение исходит от наблюдаемых объектов 11. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов 11, а также оптическое излучение, проходящее сквозь наблюдаемые объекты 11. Оптическая система каждого из каналов 1 фокусирует излучение от наблюдаемых объектов в плоскостях фокусировки и формирует изображение наблюдаемых объектов 11.
Пучки лучей проходят через элементы 2 оптической системы и диафрагмы 3 осуществляют ограничение оптического излучения.
Оптической системой формируются изображения наблюдаемых объектов на матричных светочувствительных детекторах 4, которые преобразуют оптическое излучение в электрический сигнал.
С помощью узлов 8 перемещения элементов оптической системы перемещают один или более элементов 2 оптической системы вдоль оптической оси и/или с помощью узла 9 перемещают по матричный светочувствительный детектор 4 вдоль оптической оси или вращают вокруг точки А пересечения оптической оси со светочувствительной поверхностью матричного светочувствительного детектора 4 с обеспечением различной величины смещения светочувствительной поверхности матричного светочувствительно детектора 4 относительно заднего фокуса F' оптической системы канала 1 и/или с помощью узлов 9 управления формой диафрагмы изменяют форму по меньшей мере одной диафрагмы 3, что позволяет поочередно сформировать два и более изображения с различной степенью размытия, определяемой в первую очередь масштабами функции размытия точки. Если различная величина смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы канала от соответствующего смещения детектора при формировании предыдущего изображения обеспечивается наклоном детектора, то допускается наличие зоны с одинаковым смещением, которая представляет собой область, близлежащую к линии, образованной пересечением светочувствительных поверхностей детекторов.
Электрический сигнал преобразуется или непосредственно с помощью матричного светочувствительного детектора 4 или с помощью дополнительных аналогово-цифровых преобразователей в поток цифровых данных - цифровые изображения.
Формирование и фиксация двух и более цифровых изображений осуществляется последовательно.
Цифровые изображения передаются в блок 5 оценки расстояний, который осуществляет обработку изображений и измеряет расстояние. Измерение расстояний осуществляется посредством определения оптических передаточных функций канала 1 для различных областей изображения, которым соответствуют различные области поля зрения устройства. Промежуточные результаты работы блока 5 оценки расстояний и непосредственно оценки измеряемых расстояний передаются в блок 6 оценки точности измерений. На основе этих данных блок 6 оценки точности измерений определяет точность проведенных измерений для каждой области измерений. Результаты оценки точности могут быть переданы потребителю результатов измерений, а также в блок 7 регулировки или в блок 5 оценки расстояний для их дальнейшей переработки и/или учета при следующем цикле измерений. Например, данные о точности проведенных измерений могут использоваться потребителем непосредственно при анализе результатов измерений, или же, в блоке 5 оценки расстояний может осуществляться отслеживание изменения результатов измерения и оценки точности во времени. Блок 7 регулировки осуществляет управление устройством на основании данных о точности проведенных измерений, передавая управляющие сигналы узлам 8 перемещения элементов 2 оптической системы, узлам 9 перемещения и поворота матричного светочувствительного детектора 4 и узлам 13 управления формой диафрагм 3, осуществляя перемещение элементов 2 оптической системы, перемещение и поворот матричного светочувствительного детектора 4 и изменение формы диафрагм 3.
В случае недостаточной освещенности наблюдаемых объектов 11 включают источник 10 оптического излучения, который изменяет освещенность наблюдаемых объектов.
Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством по первому варианту осуществляется следующим образом.
Оптическое излучение исходит от наблюдаемых объектов. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов, а также оптическое излучение, проходящее сквозь наблюдаемые объекты. Оптические система устройства, одна или несколько, фокусируют излучение от наблюдаемых объектов и формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия. Светочувствительный матричный детектор, один или несколько, преобразует оптическое излучение в электрические величины. Далее эти электрические величины преобразуются в цифровую форму или схемой аналого-цифрового преобразования, встроенной в детектор изображения или с помощью внешних аналого-цифровых преобразователей. В процессе накопления, передачи и преобразования аналогового сигнала в цифровую форму полезный сигнал искажается шумами электронного тракта. Для простоты далее под шумовыми характеристиками детекторов понимаются все шумовые характеристики тракта фиксации изображения, влияющие на изображение. Для каждого светочувствительного матричного детектора может быть использована отдельная оптическая система. А может быть использована и общая оптическая система с разделением светового потока. Светочувствительный матричный детектор вместе с относящейся к нему частью оптической системы образует канал формирования и фиксации изображений. Для статичных объектов возможна реализация, когда последовательно фиксируют пару изображений с помощью одного светочувствительного матричного детектора и оптической системы. Всегда при формировании и фиксации изображений добиваются различной степени размытия формируемых изображений. Степень размытия известна и задается оптической передаточной функцией канала устройства для данного положения детектора, элементов оптической системы и формы диафрагмы канала в зависимости от расстояния до предмета. Причем для каждого процесса фиксации на каждом детекторе известен набор оптических передаточных функций, соответствующих различным расстояниям в пространстве предметов. Для обеспечения различной степени размытия, например, смещают светочувствительный матричный детектор относительно его положения, при котором было зафиксировано первое изображение. Также для обеспечения различной степени размытия можно изменять форму диафрагмы или перемещать элементы в оптической системе. Если фиксация изображений осуществляется с применением пары и более детекторов, то обеспечивают различную степень размытия аналогичными способами. При обеспечении различного смещения детектора или детекторов относительно заднего фокуса оптической системы оптические передаточные функции будут различными, и нет необходимости применять диафрагмы различной формы.
Предварительно устройство калибруют. В процессе калибровки измеряют и сохраняют в памяти оптические передаточные функции каналов формирования изображений для различных измеряемых расстояний в пределах диапазона измерений. Это может быть сделано, например, следующим образом. Перед устройством размещают тестовый объект, имитирующий точечный источник излучения, расположенный на определенном расстоянии. Имитация точечного источника может быть выполнена с помощью приспособления, включающего коллиматор оптического излучения и оптическую систему, изменяющую расходимость пучков лучей. С помощью устройства для различных расстояний регистрируют изображение точечного источника - функцию рассеяния точки и находят оптическую передаточную функцию, представляющую собой пространственный спектр функции рассеяния точки.
Также при калибровке проводят измерение шумовых характеристик светочувствительных детекторов изображения. При этом задают параметры усиления электрического сигнала, измеряют и сохраняют в памяти уровни шумов в виде амплитуд спектральной модели распределения шумов светочувствительных матричных детекторов. Шумовые характеристики могут быть измерены и в процессе фиксации изображений, если применяемые детекторы позволяют это осуществить.
Формирование и фиксация пары или более изображений сформированных с различными оптическими передаточными функциями каналов, участвующих в формировании изображений, связь между которыми известна, позволяют посредством последующей обработки изображений выбрать оптимальные оптические передаточные функции и провести косвенное измерение расстояния.
Для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, определяют измеряемое расстояние по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями.
Осуществляют выбор оптимальных оптических передаточных функций для каждой рассматриваемой области изображений следующим образом. После того как сформировали и зафиксировали не менее двух изображений выполняют обработку этих изображений. Обработка изображений может быть выполнена как непосредственно в устройстве, так и на удаленном вычислительном устройстве, реализуя указанный способ обработки. В процессе обработки изображений производят последовательность преобразований представления изображения в виде электрических величин или оптических сигналов. После получения изображений извлекают из памяти значения оптических передаточных функций для всех расстояний в пределах диапазона измерений, которые соответствуют положениям светочувствительных матричных детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения. Находят отношения пар извлеченных из памяти оптических передаточных функций различных каналов для каждого измеряемого расстояния. Для частот, на которых хотя бы одна оптическая передаточная функция принимает нулевое значение, принимают значение отношения равным нулю. Осуществляют преобразования пар изображений, а затем объединяют результаты попарных преобразований. Обработку пары изображений проводят следующим образом. Выделяют одинаковую область пары изображений, при необходимости используя оконную функцию (например, окно Хемминга, Блэкмана или другие), выполняют спектральное преобразование этой области каждого изображения пары. Для каждой пространственной частоты находят отношение амплитуд спектральных представлений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума. Для тех частот, на которых хотя бы одна из амплитуд спектральных представлений меньше либо равна амплитуде спектра шума значение отношения принимается нулевым. Сравнение может осуществляться с величиной, близкой к амплитуде спектра шума для исключения из рассмотрения сигналов с недостаточной амплитудой. Например, это может быть амплитуда спектра шума плюс два среднеквадратических отклонения этой амплитуды, полученных по результатам измерений шумовых характеристик детекторов. Для каждого измеряемого расстояния находят отношения амплитуд пар оптических передаточных функций каналов, с помощью которых производилось получение рассматриваемой пары изображений. Для частот, на которых хотя бы одна оптическая передаточная функция принимает нулевое значение, принимают значение отношения равным нулю.
Далее выбирают оптимальную пару оптических передаточных функций из пар оптических передаточных функций для различных измеряемых расстояний следующим образом. Находят целевую функцию оптимизации пар оптических передаточных функций как сумму по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин найденных отношений значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций. Для тех частот, где хотя бы одно отношение равняется нулю, отношение отношений заменяется на нулевое значение. Объединяют результаты обработки пар изображений, вычисляя значения результирующей целевой функции как среднее арифметическое значений целевых функций пар оптических передаточных функций. Если получена всего пара изображений, то результирующая целевая функция совпадает с целевой функции пары оптических передаточных функций. Выбирают оптимальные оптические передаточные функции, которым соответствует максимальное значение результирующей целевой функции.
Результатом обработки для каждой области изображений являются выбранные оптимальные оптические передаточные функции каналов и измеряемое расстояние, при котором каналы устройства обладают выбранными оптимальными оптическими передаточными функциями.
Преобразования изображений могут быть выполнены и в ином порядке, более удобном для реализации устройства.
Вычисление целевой функции выбора оптимальных пар оптических передаточных функций в указанном выше виде позволяет повысить точность выбора оптимальной пары оптических передаточных функций и расширить диапазон измерений благодаря уменьшению зависимости значений целевой функции от величины амплитуд пространственного спектра яркости излучения от наблюдаемых объектов и большей крутизне кривых целевой функции для низкочастотных составляющих пространственного спектра. Получение и использование информации о характеристиках шумов детекторов необходимо при вычислении целевой функции выбора оптимальных пар оптических передаточных функций. Если не отсекать составляющие пространственного спектра с малой амплитудой, сравнимой с амплитудой спектра шума, то результаты измерений будут в значительной степени определяться этими составляющими, которые сильно подвержены влиянию шума. А, так как в пространственном спектре изображения, как правило, составляющих с малой амплитудой значительно больше, чем тех, которые слабо подвержены влиянию шума, то результаты измерений могут оказаться недостоверными, если не учитывать шумовые характеристики детекторов.
Особенно сильно улучшения, обусловленные указанными особенностями процесса обработки изображений, проявляются на краях рабочего диапазона, где функции рассеяния точки оптической системы имеют наибольший масштаб, высокочастотная часть спектра пространственного распределения яркости наблюдаемых предметов подавляется и в большей степени сказывается влияние шумов.
Дополнительно при осуществлении способа может быть использован активный источник оптического излучения. Так, при использовании немонотонной подсветки значительно повышается точность результатов для наблюдаемых объектов с монотонным распределением яркости.
С целью пояснения настоящего изобретения ниже описаны примеры реализации способов со ссылками на фигуры.
На фиг.8 представлена схема оптико-электронного устройства с основными обозначениями, необходимыми для пояснения примера реализации способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний по первому варианту.
Устройство включает следующие позиции. Два канала формирования и фиксации изображений 1 и 15, оптические системы каналов включают оптические детали 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также диафрагмы 3 и светоделитель 12. Матричные светочувствительные детекторы 4 и 14 каналов 1 и 15 осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4 и 14. В примере рассмотрим один наблюдаемый объект 11, расположенный перпендикулярно оптической оси устройства. Для удобства рассмотрения в устройстве для обоих каналов использованы одинаковые диафрагмы прямоугольной формы, имеющие постоянный коэффициент пропускания, равный единице. Введены следующие обозначения S3, …, S11 - измеряемые расстояния (приведены пунктирными линиями), 






Для наглядности пример способа рассмотрим в одномерном пространстве.
Сначала устройство калибруют. Для каждого положения объекта измеряют оптическую передаточную функцию всех каналов устройства. Измерение оптических передаточных функций может состоять в непосредственном наблюдении модели точечного источника излучения и взятия преобразования Фурье от наблюдаемой функции рассеяния точки. Или же может измеряться модуль оптической передаточной функции посредством наблюдения и анализа тест-объектов в виде штриховых мир, или применяться другой способ для измерения передаточной функции оптической системы. Отсутствие информации о мнимой части оптической передаточной функции и наличие только функции передачи модуляции (амплитуды оптической передаточной функции) не ограничивает применимости способа, так как при обработке изображений используются только модули значений оптических передаточных функций. На фиг.9-а, 9-б, 9-в представлены графики модулей оптической передаточной функции для расположения детектора 4 на расстоянии 

На фиг.10-а, 10-б, 10-в представлены графики функций рассеяния точки, соответствующих оптическим передаточным функциям, модули которых приведены на фиг.9-а, 9-б, 9-в. В процессе калибровки оптические передаточные функции или их модули сохраняются в памяти. Оси абсцисс графиков фиг.10-а, 10-б, 10-в соответствуют нормированным пространственным координатам, значения -1 и 1 соответствуют крайним точкам на светочувствительной поверхности детекторов изображений, оси ординат представляют собой относительное значение уровня яркости, приведенное к максимальному уровню сигнала точечного источника изображения, взятого за 1. Ординаты графиков фиг.9-а, 9-б, 9-в представляют собой амплитуды преобразования Фурье функций рассеяния точки, по оси абсцисс отложена положительная часть диапазона нормированных пространственных частот. Далее, если не сказано иное, графики пространственных и частотных распределений приведены в таких же системах координат.
Также при калибровке измеряются шумовые характеристики детекторов изображения и сохраняются в памяти. В примере будем использовать детектор с единственным коэффициентом усиления, шумовая характеристика которого хорошо аппроксимируется моделью белого шума. Пространственное распределение пары реализаций шумов приведено на фиг.11, логарифмы спектральных характеристик приведены на фиг.12. Кривая с, изображенная на фиг.12, представляет собой максимальный уровень амплитуд спектральной модели шума, ее можно получить по результатам анализа множества реализаций шума и нахождения кривой, отстоящей от среднестатистической кривой амплитуд спектра реализаций шума на величину, пропорциональную среднеквадратическому отклонению амплитуд спектра. В нашем примере максимальный уровень амплитуд спектральной модели шума представлен единственным значением амплитуды постоянным для всех пространственных частот.
После проведения калибровки устройство может применяться для выполнения измерений и определения оптических передаточных функций каналов, которые участвуют в преобразовании оптического излучения от объектов.
Для упрощения рассмотрения положим, что нужно измерять расстояние только для одной области, соответствующей полному размеру матричного светочувствительного детектора, объект плоский и располагается перпендикулярно оптической оси. Размер области измерения определяется максимальным размером функции рассеяния точки. На практике, в случае если изображение велико в сравнении с максимальным размером функции рассеяния точки, измерение для каждой области проводится аналогично примеру ниже и результаты измерений для всего изображения приводятся в виде матрицы значений измерений для областей.
Рассмотрим последовательно шаги процесса обработки изображений при наблюдении объекта, резкое изображение которого представлено на фиг.13.
Распределение яркости изображения наблюдаемого объекта приведено в нормированных координатах. Координаты -1 и 1 соответствуют краям детектора изображения, части изображения, находящиеся за пределами координат -1 и 1 не фиксируются детекторами и не участвуют в обработке.
Если перед откалиброванным устройством, детекторы которого расположены на расстояниях
После фиксации изображений ведется обработка участков пар зафиксированных изображений с одинаковыми координатами на детекторах. В нашем случае размер участка совпадает с размером изображения, то есть обрабатывается лишь один участок изображения. Сначала изображения могут быть преобразованы с помощью оконной функции. В примере использовано окно Хемминга, оконная функция представлена на фиг.16, а результат преобразования - произведение сигнала зафиксированных изображений и оконной функции - на фиг.17.
После фиксации и применения оконной функции к изображениям вычисляют пространственные спектры участков изображений.
Логарифмы абсолютных значений спектральных характеристик изображений, искаженных шумом и преобразованных с помощью оконной функции, приведены на фиг.18, график а - для первого детектора, b - для второго, прямая с на этой фигуре изображает максимальный уровень амплитуд спектральной модели шума - пороговый уровень шумов для анализа спектра сигнала, который был получен при калибровке.
Затем вычисляется отношение спектральных характеристик для частот, на которых амплитуды спектров изображений превышают пороговые значения спектра шума, полученная кривая отношения приведена на графике а фиг.19.
Вычисляются отношения модулей оптических передаточных функций для всех возможных положений в пределах диапазона измерений, графики логарифмов отношений приведены на фиг.20 и соответствуют отношениям оптических передаточных функций, изображенных на фиг.9-а, 9-б, 9-в. График 6 фиг.20-б, соответствующий отношению модулей оптических передаточных функций измеряемого расстояния S8 для удобства рассмотрения последующих вычислений приведен на кривой b фиг.19, но уже в линейном масштабе.
Затем вычисляются значения целевой функции пары каналов. На кривых фиг.21 представлены примеры результатов вычислений значений промежуточных кривых - кривых отношений минимальной к максимальной из двух величин: отношений оптических передаточных функций, представленных на графиках 6 и 1 фиг.20-а, 20-б и отношений спектральных характеристик изображений, приведенных на графике а фиг.19. В вычислениях данные указанных зависимостей используются в линейном масштабе. Кривая b фигуры 21 представляет указанные отношения для измеряемого расстояния S3, кривая а фигуры 21 - для измеряемого расстояния S8 и может быть получена из соотношения кривых а и b фиг.19. Для остальных измеряемых расстояний проводятся аналогичные вычисления указанных промежуточных кривых.
Значения целевой функции пары каналов, представленной на фиг.22 получаются суммированием значений промежуточных кривых. Так, например, значению целевой функции на фиг.22 в координате 3 соответствует сумма значений промежуточной кривой b фигуры 21, а координате 8 соответствует сумма значений промежуточной кривой а фиг.21. Координаты горизонтальной оси графика фиг.22 соответствуют индексам измеряемых расстояний, то есть расстоянию S3 соответствует координата 3, для остальных координат аналогично. Так как в рассматриваемом примере используется всего два канала формирования и фиксации изображений, то график целевой функции для пары каналов будет также являться и графиком результирующей целевой функции. При использовании большего количества каналов необходимо вычислить значения целевой функции для всех различных пар каналов, а затем найти среднее значение этих целевых функций - результирующую целевую функцию всех каналов устройства.
Обработка изображений заканчивается поиском максимума целевой функции и определением искомых величин. Видно, что максимальному значению результирующей целевой функции соответствуют искомые оптимальные оптические передаточные функции первого и второго канала, приведенные на графике 6 фигуры 9-б, которые для данных полученных изображений объектов являются оптимальными в смысле максимизации целевой функции, а также соответствуют измеряемому расстоянию S8 до объекта.
Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством по второму варианту осуществляется следующим образом.
Оптическое излучение исходит от наблюдаемых объектов. Это может быть собственное или отраженное оптическое излучение от наблюдаемых объектов, а также оптическое излучение, проходящее сквозь наблюдаемые объекты. Оптические система устройства, одна или несколько, фокусируют излучение от наблюдаемых объектов и формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия. Светочувствительный матричный детектор, один или несколько, преобразует оптическое излучение в электрические величины. Далее эти электрические величины преобразуются в цифровую форму или схемой аналого-цифрового преобразования, встроенной в детектор изображения или с помощью внешних аналого-цифровых преобразователей. В процессе накопления, передачи и преобразования аналогового сигнала в цифровую форму полезный сигнал искажается шумами электронного тракта. Для простоты далее под шумовыми характеристиками детекторов понимаются все шумовые характеристики тракта фиксации изображения, влияющие на изображение. Для каждого светочувствительного матричного детектора может быть использована отдельная оптическая система. А может быть использована и общая оптическая система с разделением светового потока. Светочувствительный матричный детектор вместе с относящейся к нему частью оптической системы образует канал формирования и фиксации изображений. Для статичных объектов возможна реализация, когда последовательно фиксируют пару изображений с помощью одного светочувствительного матричного детектора и оптической системы. Всегда при формировании и фиксации изображений добиваются различной степени размытия формируемых изображений. Степень размытия известна и задается оптической передаточной функцией канала устройства для данного положения детектора, элементов оптической системы и формы диафрагмы канала в зависимости от расстояния до предмета. Причем для каждого процесса фиксации на каждом детекторе известен набор оптических передаточных функций, соответствующих различным расстояниям в пространстве предметов. Для обеспечения различной степени размытия, например, смещают светочувствительный матричный детектор относительно его положения, при котором было зафиксировано первое изображение. Также для обеспечения различной степени размытия можно изменять форму диафрагмы или перемещать элементы в оптической системе. Если фиксация изображений осуществляется с применением пары и более детекторов, то обеспечивают различную степень размытия аналогичными способами. При обеспечении различного смещения детектора или детекторов относительно заднего фокуса оптической системы оптические передаточные функции будут различными, и нет необходимости применять диафрагмы различной формы.
Предварительно устройство калибруют. В процессе калибровки измеряют и сохраняют в памяти оптические передаточные функции каналов формирования изображений для различных измеряемых расстояний в пределах диапазона измерений. Это может быть сделано, например, следующим образом. Перед устройством размещают тестовый объект, имитирующий точечный источник излучения, расположенный на определенном расстоянии. Имитация точечного источника может быть выполнена с помощью приспособления, включающего коллиматор оптического излучения и оптическую систему, изменяющую расходимость пучков лучей. С помощью устройства для различных расстояний регистрируют изображение точечного источника - функцию рассеяния точки и находят оптическую передаточную функцию, представляющую собой пространственный спектр функции рассеяния точки.
Также при калибровке проводят измерение шумовых характеристик светочувствительных детекторов изображения. При этом задают параметры усиления электрического сигнала, измеряют и сохраняют в памяти уровни шумов в виде амплитуд спектральной модели распределения шумов светочувствительных матричных детекторов. Шумовые характеристики могут быть измерены и в процессе фиксации изображений, если применяемые детекторы позволяют это осуществить.
Формирование и фиксация пары или более изображений сформированных с различными оптическими передаточными функциями каналов, участвующих в формировании изображений, связь между которыми известна, позволяют посредством последующей обработки изображений выбрать оптимальные оптические передаточные функции и провести косвенное измерение расстояния.
Для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, определяют измеряемое расстояние по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений, как расстояние при котором устройство обладает выбранными оптимальными оптическими передаточными функциями.
Осуществляют выбор оптимальных оптических передаточных функций для каждой рассматриваемой области изображений следующим образом. После того как сформировали и зафиксировали не менее двух изображений выполняют обработку этих изображений. Обработка изображений может быть выполнена как непосредственно в устройстве, так и на удаленном вычислительном устройстве, реализуя указанный способ обработки. В процессе обработки изображений производят последовательность преобразований представления изображения в виде электрических величин или оптических сигналов. После получения изображений извлекают из памяти значения оптических передаточных функций для всех расстояний в пределах диапазона измерений, которые соответствуют положениям светочувствительных матричных детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения. Находят отношения пар извлеченных из памяти оптических передаточных функций различных каналов для каждого измеряемого расстояния. Для частот, на которых хотя бы одна оптическая передаточная функция принимает нулевое значение, принимают значение отношения равным нулю. Осуществляют преобразования пар изображений, а затем объединяют результаты попарных преобразований. Обработку пары изображений проводят следующим образом. Выделяют одинаковую область пары изображений, при необходимости используя оконную функцию (например, окно Хемминга, Блэкмана или другие), выполняют спектральное преобразование этой области каждого изображения пары. Для каждой пространственной частоты находят отношение амплитуд спектральных представлений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума. Для тех частот, на которых хотя бы одна из амплитуд спектральных представлений меньше либо равна амплитуде спектра шума значение отношения принимается нулевым. Сравнение может осуществляться с величиной, близкой к амплитуде спектра шума для исключения из рассмотрения сигналов с недостаточной амплитудой. Например, это может быть амплитуда спектра шума плюс два среднеквадратических отклонения этой амплитуды, полученных по результатам измерений шумовых характеристик детекторов. Для каждого измеряемого расстояния находят отношения амплитуд пар оптических передаточных функций каналов с помощью которых производилось получение рассматриваемой пары изображений. Для частот, на которых хотя бы одна оптическая передаточная функция принимает нулевое значение, принимают значение отношения равным нулю.
Далее выбирают оптимальную пару оптических передаточных функций из пар оптических передаточных функций для различных измеряемых расстояний следующим образом. Находят целевую функцию оптимизации пар оптических передаточных функций как сумму по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - найденных отношений значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций. Для тех частот, где хотя бы одно отношение равняется нулю, отношение отношений заменяется на нулевое значение. Объединяют результаты обработки пар изображений, вычисляя значения результирующей целевой функции как среднее арифметическое значений целевых функций пар оптических передаточных функций. Если получена всего пара изображений, то результирующая целевая функция совпадает с целевой функции пары оптических передаточных функций. Выбирают оптимальные оптические передаточные функции, которым соответствует максимальное значение результирующей целевой функции.
Результатом обработки для каждой области изображений являются выбранные оптимальные оптические передаточные функции каналов и измеряемое расстояние, при котором каналы устройства обладают выбранными оптимальными оптическими передаточными функциями.
Преобразования изображений могут быть выполнены и в ином порядке, более удобном для реализации устройства.
Вычисление целевой функции выбора оптимальных пар оптических передаточных функций в указанном выше виде позволяет повысить точность выбора оптимальной пары оптических передаточных функций и расширить диапазон измерений благодаря уменьшению зависимости значений целевой функции от величины амплитуд пространственного спектра яркости излучения от наблюдаемых объектов и большей крутизне кривых целевой функции для низкочастотных составляющих пространственного спектра. Получение и использование информации о характеристиках шумов детекторов необходимо при вычислении целевой функции выбора оптимальных пар оптических передаточных функций. Если не отсекать составляющие пространственного спектра с малой амплитудой, сравнимой с амплитудой спектра шума, то результаты измерений будут в значительной степени определяться этими составляющими, которые сильно подвержены влиянию шума. А так как в пространственном спектре изображения, как правило, составляющих с малой амплитудой значительно больше, чем тех, которые слабо подвержены влиянию шума, то результаты измерений могут оказаться недостоверными, если не учитывать шумовые характеристики детекторов.
Особенно сильно улучшения, обусловленные указанными особенностями процесса обработки изображений, проявляются на краях рабочего диапазона, где функции рассеяния точки оптической системы имеют наибольший масштаб, высокочастотная часть спектра пространственного распределения яркости наблюдаемых предметов подавляется и в большей степени сказывается влияние шумов.
К результатам обработки изображений применяется способ определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства, в процессе которого также находят диапазон возможного положения наблюдаемого объекта, исправляют измеренное расстояние, заменяют оптимальные оптические передаточные функции, а также определяют погрешность измерений.
Далее производится локальная обработка для областей изображения, в процессе которой сначала сравнивают погрешность с максимально допустимой. Если погрешность превышает допустимое значение, выбирают следующую конфигурацию устройства, которая определяется на основе состава пространственного спектра участков зафиксированных изображений и данных предварительной калибровки устройства и позволяет уменьшить погрешность измерений. Конфигурация может определяться или положением светочувствительных матричных детекторов оптического излучения или положением элементов оптической системы или формой диафрагмы или комбинацией этих признаков. Выбор признака, который желательно изменять определяется конструктивом устройства, ограничениями по скорости изменения конфигурации и условиями наблюдения. Может выбираться сразу несколько альтернативных конфигураций устройства, обеспечивающих требуемое изменение оптических передаточных функций.
После проведения представленной локальной обработки для областей изображения и определения для каждой области необходимой конфигурации может возникнуть ситуация, когда потребуется, например, смещать светочувствительный матричный детектор изображений в различные стороны от текущего положения. Тогда, в зависимости от задач потребителя результатов измерений, могут быть реализованы различные подходы к выбору следующей конфигурации. Например, некоторым областям изображений может назначаться более высокий приоритет по обеспечению точности измерений по сравнению с другими областями или же, если наблюдаемые объекты неподвижны, алгоритм выбора следующей конфигурации может быть основан на выборе наиболее близкой к текущей конфигурации для тех областей изображения, для которых еще не было произведено измерений с повышенной точностью.
После окончательного выбора конфигурации устройства производят один или серию циклов измерения расстояний.
В отличие от известного способа из ближайшего аналога в заявляемом решении реализуется возможность устранения ситуации, когда точность является пониженной из-за сходства влияния на пространственный спектр яркости области наблюдаемых объектов оптических передаточных функций, соответствующих различным измеряемым расстояниям.
Способ определения величины перемещения детектора, оптических элементов или изменения формы диафрагмы основан на выборе такой конфигурации устройства, при которой целевая функция будет иметь наиболее ярко выраженный экстремум и обеспечивает повышение точности результатов измерений. Осуществление изменения конфигурации устройства выбранным образом приводит к изменению как минимум одной оптической передаточной функции и обеспечению различного соотношения амплитуд оптических передаточных функций в диапазоне частот пространственного спектра яркости области наблюдаемого предмета. Проведение дополнительного измерения с новым положением детекторов или положением элементов оптической системы или формой диафрагм или с комбинацией этих признаков, которая определяется на основе анализа состава пространственного спектра участков зафиксированных изображений и данных предварительной калибровки устройства и позволяет уменьшить погрешность измерений, повысить точность измерения расстояния и определения оптических передаточных функций, а также исключить ситуацию неопределенности предыдущего цикла измерений для немонотонных областей предметов, если таковая имелась и была вызвана одинаковым соотношением амплитуд оптических передаточных функций, характерных для расстояний предмета, отличных от действительного. В частности, выбирается такая конфигурация, для которой поведение оптических передаточных функций пар каналов для возможных положений объекта было бы наиболее различным. Это различие может характеризоваться, например, как величина, обратная количеству пространственных частот, передаваемых одновременно всеми участвующими в изменении конфигурации каналами устройства и для всех возможных положений объекта, среди частот, на которых амплитуды пространственного спектра полученных изображений превышают пороговый уровень спектральной модели шума. Передаваемые каналами пространственные частоты определяются как частоты, для которых оптические передаточные функции каналов превышает уровень спектральной модели шумов, отнесенный к общему количеству пространственных частот.
Дополнительно при осуществлении способа может быть использован активный источник оптического излучения. Так, при использовании немонотонной подсветки значительно повышается точность результатов для наблюдаемых объектов с монотонным распределением яркости.
На фиг.34 представлена схема оптико-электронного устройства с основными обозначениями, необходимыми для пояснения примера реализации способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний по второму варианту.
Устройство включает следующие позиции. Два канала формирования и фиксации изображений 1 и 15, оптические системы каналов включают оптические детали 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также диафрагмы 3 и светоделитель 12. Матричные светочувствительные детекторы 4 и 14 каналов 1 и 15 осуществляет фиксацию изображений и могут перемещаться вдоль оптических осей каналов при помощи узлов перемещения 9 и 16, обеспечивая различную величину смещения светочувствительной поверхности детекторов 1 и 14 относительно заднего фокуса оптической системы F'. В примере плоскость каждого детектора всегда перпендикулярна оптической оси и регулировка конфигурации устройства может состоять только в изменении положений детекторов. В общем же случае регулировка конфигурации устройства может быть изменена посредством перемещения одного или более оптических элементов и/или по меньшей мере одного детектора и/или изменением формы по меньшей мере одной диафрагмы. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4 и 14. Устройство снабжено блоком 6 оценки погрешностей и исправления результатов измерений, соединенным с блоком 5 оценки расстояний, и блоком 7 регулировки взаимного смещения детекторов соединенным с блоком 5 оценки расстояний и блоком 6 оценки погрешностей и исправления результатов измерений. В примере рассмотрим один наблюдаемый объект 11, расположенный перпендикулярно оптической оси устройства. Для удобства рассмотрения в устройстве для обоих каналов использованы одинаковые диафрагмы прямоугольной формы, имеющие постоянный коэффициент пропускания, равный единице.
Введены следующие обозначения S1, …, S11 - измеряемые расстояния (приведены пунктирными линиями), 




Для наглядности пример способа рассмотрим в одномерном пространстве.
Сначала устройство калибруют. Для каждого положения объекта измеряют оптическую передаточную функцию всех каналов для каждой возможной конфигурации устройства. Измерение оптических передаточных функций может состоять в непосредственном наблюдении модели точечного источника излучения и взятия преобразования Фурье от наблюдаемой функции рассеяния точки. Или же может измеряться модуль оптической передаточной функции посредством наблюдения и анализа тест-объектов в виде штриховых мир, или применяться другой способ для измерения передаточной функции оптической системы. Отсутствие информации о мнимой части оптической передаточной функции и наличие только функции передачи модуляции (амплитуды оптической передаточной функции) не ограничивает применимости способа, так как при обработке изображений используются только модули значений оптических передаточных функций. На фиг.23-а, 23-б, 23-в представлены графики модулей оптической передаточной функции для расположения детектора 4 на расстоянии 



На фиг.24-а, 24-б, 24-в представлены графики функций рассеяния точки, соответствующих оптическим передаточным функциям, модули которых приведены на фиг.23-а, 23-б, 23-в. В процессе калибровки оптические передаточные функции или их модули сохраняются в памяти. Оси абсцисс графиков фиг.24-а, 24-б, 24-в соответствуют нормированным пространственным координатам, значения -1 и 1 соответствуют крайним точкам на светочувствительной поверхности детекторов изображений, оси ординат представляют собой относительное значение уровня яркости, приведенное к максимальному уровню сигнала точечного источника изображения, взятого за 1. Ординаты графиков фиг.23-а, 23-б, 23-в представляют собой амплитуды преобразования Фурье функций рассеяния точки, по оси абсцисс отложена положительная часть диапазона нормированных пространственных частот. Далее, если не сказано иное, графики пространственных и частотных распределений приведены в таких же системах координат.
Также при калибровке измеряются шумовые характеристики детекторов изображения и сохраняются в памяти. В примере будем использовать детектор с единственным коэффициентом усиления, шумовая характеристика которого хорошо аппроксимируется моделью белого шума. Пространственное распределение пары реализаций шумов приведено на фиг.11, логарифмы спектральных характеристик приведены на фиг.12. Кривая с, изображенная на фиг.12, представляет собой максимальный уровень амплитуд спектральной модели шума, ее можно получить по результатам анализа множества реализаций шума и нахождения кривой, отстоящей от среднестатистической кривой амплитуд спектра реализаций шума на величину, пропорциональную среднеквадратическому отклонению амплитуд спектра. В нашем примере максимальный уровень амплитуд спектральной модели шума представлен единственным значением амплитуды постоянным для всех пространственных частот.
Данные калибровочных измерений сохраняются в памяти, доступной всем блокам, участвующим в обработке изображений.
После проведения калибровки устройство может применяться для выполнения измерений и определения оптических передаточных функций каналов, которые участвуют в преобразовании оптического излучения от объектов.
Для упрощения рассмотрения положим, что нужно измерять расстояние только для одной области, соответствующей полному размеру матричного светочувствительного детектора, объект плоский и располагается перпендикулярно оптической оси. Размер области измерения определяется максимальным размером функции рассеяния точки. На практике, в случае если изображение велико в сравнении с максимальным размером функции рассеяния точки измерение для каждой области проводится аналогично примеру ниже и результаты измерений для всего изображения приводятся в виде матрицы значений измерений для областей.
Рассмотрим последовательно шаги процесса обработки изображений блоком 5 оценки расстояний (фиг.36) при наблюдении объекта, резкое изображение которого представлено на фиг.13.
Распределение яркости изображения наблюдаемого объекта приведено в нормированных координатах. Координаты -1 и 1 соответствуют краям детектора изображения, части изображения, находящиеся за пределами координат -1 и 1, не фиксируются детекторами и не участвуют в обработке.
Если перед откалиброванным устройством, детекторы которого расположены на расстояниях 
После фиксации изображений ведется обработка участков пар зафиксированных изображений с одинаковыми координатами на детекторах. В нашем случае размер участка совпадает с размером изображения, то есть обрабатывается лишь один участок изображения. Сначала изображения могут быть преобразованы с помощью оконной функции. В примере использовано окно Хемминга, оконная функция представлена на фиг.16, а результат преобразования - произведение сигнала зафиксированных изображений и оконной функции - на фиг.27.
После фиксации и применения оконной функции к изображениям, вычисляют пространственные спектры участков изображений.
Логарифмы абсолютных значений спектральных характеристик изображений, искаженных шумом и преобразованных с помощью оконной функции, приведены на фиг.28, график a - для первого детектора, b - для второго, прямая с на этой фигуре изображает максимальный уровень амплитуд спектральной модели шума - пороговый уровень шумов для анализа спектра сигнала, который был получен при калибровке.
Затем вычисляется отношение спектральных характеристик для частот, на которых амплитуды спектров изображений превышают пороговые значения спектра шума, полученный график отношения приведен на фиг.29.
Вычисляются отношения модулей оптических передаточных функций для всех возможных положений в пределах диапазона измерений, графики логарифмов отношений приведены на фиг.30-а, 30-б, 30-в и соответствуют отношениям оптических передаточных функций, изображенных на фиг.23-а, 23-б, 23-в. График 8 фиг.30-в, соответствующий отношению модулей оптических передаточных функций измеряемого расстояния S8 для удобства рассмотрения последующих вычислений приведен на кривой b фиг.29, но уже в линейном масштабе.
Затем вычисляются значения целевой функции пары каналов. На кривых фиг.31 представлены примеры результатов вычислений значений промежуточных кривых - кривых отношений минимальной к максимальной из двух величин: отношений оптических передаточных функций, представленных на графиках 3 и 8 фиг.30-а, 30-в и отношений спектральных характеристик изображений, представленных на графике фиг.29. В вычислениях данные указанных зависимостей используются в линейном масштабе. Кривая b фигуры 31 представляет указанные отношения для измеряемого расстояния S3, кривая а фигуры 31 представляет указанные отношения для измеряемого расстояния S8 и может быть получена из соотношения кривых а и b фиг.29. Для остальных измеряемых расстояний проводятся аналогичные вычисления указанных промежуточных кривых.
Значения целевой функции пары каналов, представленной на фиг.32 получаются суммированием значений промежуточных кривых. Так, например, значению целевой функции на фиг.32 в координате 3 соответствует сумма значений промежуточной кривой b фигуры 31, а координате 8 соответствует сумма значений промежуточной кривой а фиг.31. Координаты горизонтальной оси графика фиг.32 соответствуют индексам измеряемых расстояний, то есть расстоянию S3 соответствует координата 3, для остальных координат аналогично. Так как в рассматриваемом примере используется всего два канала формирования и фиксации изображений, то график целевой функции для пары каналов будет также являться и графиком результирующей целевой функции. При использовании большего количества каналов необходимо вычислить значения целевой функции для всех различных пар каналов, а затем найти среднее значение этих целевых функций - результирующую целевую функцию всех каналов устройства.
Видно, что близкие по величине максимальные значения результирующей целевой функции соответствуют оптимальным оптическим передаточным функциям первого и второго канала, приведенным на графиках 3 и 8 фиг.9-а, 9-в, которые для данных полученных изображений объектов являются оптимальными в смысле максимизации целевой функции, а также соответствуют положениям объекта на расстояниях S3 и S8.
Применение критерия максимума результирующей целевой функции приведет к тому, что за расстояние до объекта будет принято расстояние S3. Однако в нашем случае доподлинно известно, что действительное расстояние до объекта соответствует S8. Таким образом, погрешность измерений 
Применяя способ оценки погрешностей и исправления результатов проведенных измерений (см. дополнительно описание для соответствующего способа) сначала определяют диапазон возможных положений объекта, например, следующим образом. За возможные положения объекта при измерениях для пары каналов принимают все положения, для которых нормированная по суммарному значению целевая функция пары каналов имеет локальные максимумы, а также принимает значения, превосходящие значения среднестатистической нормированной целевой функции пары каналов для диапазона измерений, уменьшенной на величину среднеквадратического отклонения нормированной целевой функции для диапазона измерений. Возможны другие реализации способа определения возможных положений объекта, например, без наложения требования о наличии локального экстремума целевой функции пары каналов. На кривой а фиг.33 изображена полученная ранее, но нормированная по суммарному значению целевая функция. На кривой b фиг.33 приведена среднестатистическая нормированная целевая функция для диапазона измерений, на кривой с - она же, уменьшенная на величину среднеквадратического отклонения для диапазона измерений. Значения кривых среднестатистической нормированной целевой функции и среднеквадратических отклонений нормированной целевой функции пар каналов для диапазона измерений определяются в процессе предварительной калибровки устройства. В случае если используется больше двух каналов формирования и фиксации изображений, сначала находят диапазоны возможных положений для всех различных пар каналов, а затем находят результирующий диапазон возможных положений как пересечение диапазонов возможных положений для пар каналов.
В рассматриваемой нами ситуации диапазон возможных положений наблюдаемого объекта включает положения S3 и S8. В случае с применением критерия максимума результирующей целевой функции мы получили измеряемое расстояние до объекта S0i,=S3 и действительную погрешность измерений

Но даже уменьшенная погрешность определения положения объекта 

Новая конфигурация устройства определяется в блоке 7 регулировки взаимного смещения детекторов следующим образом. Так как регулировка конфигурации устройства в данном примере может состоять только в изменении положений детекторов, то среди различных размещений детекторов выбирают такое размещение, для которого поведение оптических передаточных функций каналов для возможных положений объекта было бы наиболее различным. Это различие может характеризоваться, например, как величина, обратная количеству пространственных частот, передаваемых одновременно всеми участвующими в изменении конфигурации каналами устройства и для всех возможных положений объекта, среди частот, на которых амплитуды пространственного спектра полученных изображений превышают пороговый уровень спектральной модели шума. Передаваемые каналами пространственные частоты определяются как частоты, для которых оптические передаточные функции каналов превышает уровень спектральной модели шумов, отнесенный к общему количеству пространственных частот.
Применяя указанный способ выбора конфигурации, для рассматриваемого примера была найдена конфигурация с расположением первого детектора 4 

Промежуточные данные, использованные для расчета количества пространственных частот передаваемых одновременно всеми участвующими в изменении конфигурации каналами устройства, приведены на фиг.34: кривые a, b - модули оптических передаточных функций для первого и второго каналов и возможного положения объекта S0=S3, кривые с и d - для первого и второго канала и возможного положения объекта S0=S8, соответственно. Точки кривой е на фиг.34 представляет указанные выше передаваемые частоты, где единичные значения соответствуют передаваемым всеми каналами частотам из множества частот, на которых амплитуды пространственного спектра полученных изображений (логарифмы модулей спектров приведены на фиг.28) превышают пороговый уровень спектральной модели шума.
После выбора новой конфигурации и выполнения команд блока 7 регулировки взаимного смещения (фиг.36) исполнительными механизмами - узлами перемещения 9 и 16 детекторов (фиг.36) полностью аналогично описанию выше проводится дополнительный цикл измерений.
Модули оптических передаточных функций и функции рассеяния точки, характерные для новой конфигурации приведены на фиг.9-а, 9-б, 9-в и фиг.10-а, 10-б, 10-в. Объект, как и в случае первого цикла измерений, имеет распределение яркости, приведенное на фиг.13 и расположен на том же расстоянии S0=S8. Изображения объекта, формируемые оптическими системами каналов, приведены на фиг.14, они же, искаженные шумом - на фиг.15, после применения функции окна Хемминга фиг.16 в начале нового процесса обработки изображений получают преобразованные изображения фиг.17. Логарифмы амплитуд спектров преобразованных изображений приведены на фиг.18, логарифмы отношений амплитуд спектров - на кривой а фиг.19. Найденные отношения модулей оптических передаточных функций для различных измеряемых расстояний изображены на фиг.20-а, 20-б, 20-в. Промежуточные кривые отношений минимальной к максимальной из двух величин: отношений модулей оптических передаточных функций, представленных на графиках 6 и 1 фиг.20-а, 20-б и отношений спектральных характеристик изображений, приведенных на графике а фиг.19, изображены на фиг.21. В вычислениях данные указанных зависимостей используются в линейном масштабе. Кривая b фигуры 21 представляет указанные отношения для измеряемого расстояния S3, кривая а фигуры 21 - для измеряемого расстояния S8 и может быть получена из соотношения кривых а и b фиг.19. Для остальных измеряемых расстояний проводятся аналогичные вычисления указанных промежуточных кривых. Значения результирующей целевой функции для новой конфигурации устройства приведены на фиг.22.
После проведения дополнительного цикла измерений снова применяется способ оценки погрешности и исправления результатов произведенных измерений оптико-электронного устройства.
Оценивается диапазон возможных положений объекта. При применении указанного выше способа оценки этого диапазона получаем точечную оценку S8. На кривой а фиг.35 изображена полученная ранее, но нормированная по суммарному значению целевая функция. На кривой b фиг.35 приведена среднестатистическая нормированная целевая функция для диапазона измерений, на кривой с - она же, уменьшенная на величину среднеквадратического отклонения для диапазона измерений.
Оценка погрешности в данном случае будет 
Способ определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства может быть осуществлен следующим образом.
Определить погрешности и исправить результаты измерений с помощью предлагаемого способа можно для способа измерений, который состоит в следующем. Получают по меньшей мере два изображения наблюдаемых объектов, сформированных с различной степенью размытия, и производят их обработку.
Оптические системы устройства, одна или несколько, фокусируют излучение от наблюдаемых объектов и формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия. Светочувствительный матричный детектор, один или несколько, преобразует оптическое излучение в электрические величины. Далее эти электрические величины преобразуются в цифровую форму или схемой аналого-цифрового преобразования, встроенной в детектор изображения или с помощью внешних аналого-цифровых преобразователей. В процессе накопления, передачи и преобразования аналогового сигнала в цифровую форму полезный сигнал искажается шумами электронного тракта. Для простоты далее под шумовыми характеристиками детекторов понимаются все шумовые характеристики тракта фиксации изображения, влияющие на изображение. Для каждого светочувствительного матричного детектора может быть использована отдельная оптическая система. А может быть использована и общая оптическая система с разделением светового потока. Светочувствительный матричный детектор вместе с относящейся к нему частью оптической системы образует канал формирования и фиксации изображений. Для статичных объектов возможна реализация, когда последовательно фиксируют пару изображений с помощью одного светочувствительного матричного детектора и оптической системы. Всегда при формировании и фиксации изображений добиваются различной степени размытия формируемых изображений. Степень размытия известна и задается оптической передаточной функцией канала устройства. Оптические передаточные функции каналов измеряют и сохраняют в памяти в процессе предварительной калибровки для различных измеряемых расстояний в пределах диапазона измерений. Степень размытия может задаваться с помощью функции рассеяния точки, если этого требует способ измерений. Способ определения погрешности измерений и исправления результатов измерений оптико-электронного устройства может быть эквивалентно построен на использовании функции рассеяния точки вместо оптической передаточной функции.
В процессе обработки изображений для областей поля зрения, которым соответствуют области изображений и области наблюдаемых объектов, выбирают оптимальные оптические передаточные функции каналов формирования и фиксации изображений из оптических передаточных функций для расстояний в пределах диапазона измерений исходя из условия обеспечения глобального экстремума результирующей целевой функции оптимизации. Если задача оптимизации состоит в минимизации целевой функции, то экстремумом должно быть минимальное значение, если же задача оптимизации состоит в максимизации целевой функции, то экстремумом должно быть максимальное значение.
Входными данными для реализации способа определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства для каждой области являются кривые результирующих целевых функций и целевые функции пар каналов, полученные в ходе измерений, а также точечные оценки измеренных расстояний и связанные с ними значения оптимальных оптических передаточных функций.
Рассмотрим реализацию способа определения погрешностей и исправления результатов проведенных измерений оптико-электронного устройства применительно к указанному способу измерений.
Предварительно проводят дополнительную калибровку устройства для различных уровней шума детекторов изображений.
В качестве калибровочных мишеней используют тест-объекты в виде задаваемых распределений яркости, расположенных на известном расстоянии от устройства. Например, тест-объектом может служить цифровой дисплей с выводимыми на него изображениями.
Для каждого тест-объекта и каждого расстояния проводят цикл измерений, в процессе которого получают значения целевых функций пар каналов. Целевые функции для различных тест-объектов, находящихся на одинаковом расстоянии могут значительно отличаться. Это зависит, главным образом, от следующих факторов. Во-первых, от уровня шума детекторов, во-вторых, от амплитуд энергии пространственного спектра изображения, а также распределения энергии спектра по частотам, в третьих, от оптических передаточных функций каналов устройства, характерных для данного расстояния до тест-объекта.
Нужно отметить, что для изображений с различным распределением яркости, имеющих не узкополосный спектральный состав, целевые функции имеют одинаковый характер, если энергия спектра шума мала по сравнению с энергией спектра изображения для большого количества пространственных частот. Факт сходства характера целевых функций для различных изображений позволяет охарактеризовать устройство с помощью среднестатистической целевой функции и среднеквадратических отклонений значений целевых функций для диапазона измерений и для каждой различной пары каналов.
При увеличении шума целевые функции для различных изображений могут быть значительно искажены и отличаться друг от друга. Особенно сильно это отличие проявляется на краях диапазона измерений, для больших дефокусировок, когда хотя бы одно изображение размыто значительно и сложно отличить одно сильно размытое изображение от другого чуть менее размытого и при этом влияние шума осложняет задачу. Неточность измерений в подобных ситуациях проявляется в том, что выбранные оптимальные оптические передаточные функции не соответствуют действительным оптическим передаточным функциям устройства и в том, что измеряемое расстояние не соответствует действительному расстоянию. То есть положение экстремума целевой функции отклоняется идеального положения, соответствующего действительному расстоянию до области объекта. В худших случаях погрешность измерений может соответствовать величине диапазона измерений.
Зависимость характера искажения целевой функции от соотношения энергий спектра размытых изображений и энергии шума успешно характеризуется среднеквадратическим отклонением целевой функции реализации единичного измерения от среднестатистической целевой функции пары каналов для диапазона измерений. Эти характеристики, среднестатистическая целевая функция и среднеквадратическое отклонение целевой функции пары каналов для диапазона измерений применяются для определения диапазона возможного положения объекта, а затем и для определения погрешности измерений и исправления результатов измерений и вычисляются следующим образом.
По результатам вычисления значений целевых функций для каждого расстояния нормируют целевые функции пар каналов измерений для тест-объектов по суммарному значению целевой функции. Затем вычисляют среднестатистические целевые функции и среднеквадратические отклонения целевых функций пар каналов для диапазона измерений.
Результаты дополнительной калибровки используются для определения погрешности измерений и исправления измерений следующим образом.
Находят диапазон возможного положения наблюдаемого объекта для каждой рассматриваемой области изображений. Оценка диапазона возможных положений наблюдаемого объекта состоит в сравнении результатов проведенного измерения со статистическими характеристиками с учетом среднеквадратических отклонений целевых функций для диапазона измерений. За возможные положения объекта при измерениях для пары каналов принимают все положения, для которых нормированная по суммарному значению целевая функция пары каналов имеет локальные максимумы, а также принимает значения, превосходящие значения среднестатистической нормированной целевой функции пары каналов для диапазона измерений, уменьшенной на величину среднеквадратического отклонения среднестатистической нормированной целевой функции для диапазона измерений. Возможны другие реализации способа определения возможных положений объекта, например, без наложения требования о наличии локального экстремума целевой функции пары каналов. В случае если используется больше двух каналов формирования и фиксации изображений, сначала находят диапазоны возможных положений для всех различных пар каналов, а затем находят результирующий диапазон возможных положений как пересечение диапазонов возможных положений для пар каналов. Где среднестатистическая целевая функция и величина среднеквадратического отклонения пары каналов для диапазона измерений определяются при калибровке для уровня шума, соответствующего шуму детекторов при фиксации изображений.
В итоге исправляют расстояние, полученное по результатам измерений, заменяя его на расстояние, соответствующее середине диапазона возможного положения наблюдаемого объекта, и заменяют оптимальные оптические передаточные функции на оптические передаточные функции, которыми устройство обладает при данном расстоянии, а также определяют погрешность измерений как половину диапазона возможного положения наблюдаемого объекта.
Сравнение целевых функций пар каналов, полученных при измерениях со среднестатистическими целевыми функциями и среднеквадратическими отклонениями целевых функций пар каналов для диапазона измерений, полученными при калибровке для уровня шума, соответствующего шуму детекторов при фиксации изображения,, позволяет оценить для областей поля зрения диапазон возможного положения наблюдаемых объектов, а также исправить точечную оценку измеренного расстояния, полученную при проведении измерений, и дать оценку погрешности результатов измерений. Коррекция измерений на основе статистических данных позволяет, замещая результаты значениями середины диапазона возможного положения, предоставить выходные данные, которые при их рассмотрении без учета оценки точности или рассмотрения диапазона возможных расстояний будут иметь меньшую абсолютную погрешность.
Рассмотрим пример реализации способа определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства, далее, для краткости, способа определения погрешности, применительно к измерениям, производимым в соответствии с заявляемым способом получения и обработки изображений для определения оптических передаточных функций и измерения расстояний по первому варианту. Возможно применение способа оценки погрешности в связке с другими способами измерения, состоящими в получении и обработке пары и более изображений, сформированных с различной степенью размытия для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, и последующем выборе оптимальных оптических передаточных функций каналов формирования и фиксации изображений из оптических передаточных функций для расстояний в пределах диапазона измерений при которых результирующая целевая функция оптимизации имеет глобальный экстремум, а также определяют измеряемое расстояние, как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, где значения оптических передаточных функций измеряются при проведении предварительной калибровки и сохраняются в памяти. В частности, целевая функция поиска оптимальных оптических передаточных функций может быть в виде евклидовой нормы, как в ближайшем аналоге способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний (заявка США No. US 2010/0118142, МПК: H04N 7/18, 2010).
На фиг.37 представлена схема оптико-электронного устройства с основными обозначениями, необходимыми для пояснения примера способа для определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства.
Устройство включает следующие позиции. Два канала формирования и фиксации изображений 1 и 15, оптические системы которых включают оптические детали 2, например, линзы, дифракционные элементы, призмы, зеркала, светофильтры или оптические детали других типов, а также диафрагмы 3 и светоделитель 12 осуществляют фор. Матричные светочувствительные детекторы 4 и 14 каналов 1 и 15 осуществляет фиксацию изображений. Блок 5 оценки расстояний соединен с матричными светочувствительными детекторами 4 и 14. В примере рассмотрим один наблюдаемый объект 11, расположенный перпендикулярно оптической оси устройства. Для удобства рассмотрения в устройстве для обоих каналов использованы одинаковые диафрагмы прямоугольной формы, имеющие постоянный коэффициент пропускания, равный единице.
Введены следующие обозначения S3, …, S11 - измеряемые расстояния (приведены пунктирными линиями), 




Устройство снабжено блоком 6 оценки погрешностей и исправления результатов измерений, соединенным с блоком 5 оценки расстояний.
Матричные светочувствительные детекторы 4 и 14 установлены неподвижно на расстояниях 

Для применения способа получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством предварительно проводят калибровку, в процессе которой определяют значения оптических передаточных функций. Измерение оптических передаточных функций может состоять в непосредственном наблюдении модели точечного источника излучения и взятия преобразования Фурье от наблюдаемой функции рассеяния точки. Или же может измеряться модуль оптической передаточной функции посредством наблюдения и анализа тест-объектов в виде штриховых мир, или применяться другой способ для измерения передаточной функции оптической системы. Отсутствие информации о мнимой части оптической передаточной функции и наличие только функции передачи модуляции (амплитуды оптической передаточной функции) не ограничивает применимости способа, так как при обработке изображений используются только модули значений оптических передаточных функций. На фиг.9-а, 9-б, 9-в представлены графики модулей оптической передаточной функции для расположения детектора 4 на расстоянии 

Для обеспечения работы способа определения погрешности перед проведением измерений помимо основной калибровки, необходимой для проведения измерений, проводят дополнительную калибровку, по результатам которой получают статистические характеристики конфигураций устройства: среднестатистические целевые функции и среднеквадратические отклонения значений результирующих целевых функций для диапазона измерений. Характеристики снимаются для различных пар каналов устройства, в рассматриваемом случае - для одной пары каналов. В процессе дополнительной калибровки сначала задают конфигурацию устройства, затем помещают каждый тест-объект на известном расстоянии, получают его изображения для различных уровней шума детекторов изображения и проводят цикл измерений. После проведения измерений для всех выбранных тест-объектов по данным измерений определяют статистические характеристики. В примере положим лишь единственный коэффициент усиления электронного тракта детекторов изображений уровень шумов ему соответствующий.
На фиг.38 приведена кривая распределений яркости изображения, использованного в примере среди множества калибровочных тест-объектов. Оси абсцисс графиков фиг.38 и других графиков пространственных распределений сигналов, приведенных ниже, соответствуют нормированным пространственным координатам, значения -1 и 1 соответствуют крайним точкам на светочувствительной поверхности детекторов изображений, оси ординат представляют собой относительное значение уровня яркости, приведенное к максимальному уровню сигнала точечного источника изображения, взятого за 1. Желательно использовать достаточное количество различных реалистичных распределений яркости объектов, которые могут наблюдаться в условиях эксплуатации устройства.
На фигурах 39 и 40 приведены примеры размытых и искаженных шумом изображений тест-объекта, имеющего пространственное распределение яркости, представленное на фиг.38, для положений 

После получения изображений вычисляют целевую функцию оптимизации для каждого тест-объекта, нормируют ее по суммарному значению и находят среднестатистическую нормированную целевую функцию для каждого измеряемого расстояния по всем тест-объектам. Целевые функции для указанного тест-объекта фиг.38, расположенного на расстояниях S0=S5 и S0=S8 приведены на фиг.41 и 42 соответственно. В данном примере целевые функции определяются таким же образом, как в заявляемом способе получения и обработки изображений для определения оптических передаточных функций и измерения расстояний по первому варианту. При применении рассматриваемого способа с другим способом измерений целевая функция должна определяться таким же образом, как в используемом способе измерений.
Среднестатистические нормированные целевые функции для фиксированных расстояний, полученные при калибровке по 512 различным распределениям яркости в качестве тест-объектов, обозначены буквой а и приведены на фигуре 43 для расстояния до тест-объектов S0=S5, а также на фигуре 44 для расстояния до тест-объектов S0=S8. Буквой b на этих фигурах обозначены среднестатистические нормированные целевые функции для фиксированных расстояний, уменьшенные на величину среднеквадратических отклонений нормированных целевых функций для фиксированных расстояний от среднестатистических нормированных целевых функций. В процессе получения среднестатистических характеристик целевые функции для тест-объектов с малым отношением сигнал-шум и большим отклонением положения экстремума целевой функции относительно координаты соответствующей действительному положению тест-объекта могут быть отброшены.
После получения среднестатистических нормированных целевых функций каналов для фиксированных расстояний и их среднеквадратических отклонений по результатам дополнительной калибровки для фиксированных расстояний, находят итоговые обобщенные характеристики, которые применяются в способе оценки погрешностей к результатам проведенных измерений. Первой характеристикой является среднестатистическая нормированная целевая функция для диапазона измерений, изображенная кривой а фигуры 45, определяемая для каждого расстояния из диапазона измерений, как значение среднестатистической нормированной целевой функции для фиксированного расстояния в координате, соответствующей данному расстоянию. То есть, например, значение кривой а фигуры 45 в координате 5 соответствует значению среднестатистической нормированной целевой функции, полученной для соответствующего расстояния до объектов S0=S5 в координате 5, приведенной на кривой а фигуры 43. Значение кривой а фигуры 45 в координате 8 соответствует значению среднестатистической нормированной целевой функции, полученной для соответствующего расстояния до объектов S0=S8 в координате 8, приведенной на кривой а фигуры 44. Таким образом, следует различать среднестатистическую нормированную целевую функцию для фиксированного расстояния и для диапазона измерений - при оценке погрешностей и исправлении результатов измерений используется характеристика для диапазона. Второй итоговой характеристикой дополнительной калибровки является характеристика среднеквадратических отклонений нормированной целевой функции для диапазона измерений. Эта характеристика определяется аналогично среднестатистической нормированной целевой функции для диапазона измерений. На кривой b фигуры 45 представлена среднестатистическая нормированная целевая функция для диапазона измерений, уменьшенная на величину характеристики среднеквадратических отклонений нормированных целевых функций для диапазона измерений.
После того, как дополнительная калибровка произведена можно оценивать погрешности и исправлять результаты произведенных измерений. Дополнительная калибровка может производиться как с помощью только блока 5 оценки расстояний и блока 6 оценки погрешностей устройства, так и с использованием дополнительных вычислителей. В случае, если устройство допускает реализовать несколько конфигураций, за счет, например, регулировки положений детекторов аналогично устройству, приведенному на фиг.36, то дополнительная калибровка проводится для каждой возможной конфигурации устройства. Результаты дополнительной калибровки сохраняются в памяти, доступной блоку 6 оценки погрешностей и исправления результатов измерений (фиг.37).
Рассмотрим основные фигуры, относящиеся к примеру измерений, проводимых в блоке 5 оценки расстояний (фиг.37) в соответствии с заявляемым способом получения и обработки изображений для определения оптических передаточных функций и измерения расстояний по первому варианту. Допустим, объект имеет распределение яркости, приведенное на фиг.13 и расположен на расстоянии S0=S8. Модули оптических передаточных функций и функции рассеяния точки, характерные для применяемой конфигурации устройства приведены на фиг.9-а, 9-б, 9-в и фиг.10-а, 10-б, 10-в и соответствуют различным расстояниям до объекта. Изображения объекта, формируемые оптическими системами каналов, приведены на фиг.14, они же, искаженные шумом - на фиг.15, после применения функции окна Хемминга фиг.16 в начале нового процесса обработки изображений получают преобразованные изображения фиг.17. Логарифмы амплитуд спектров преобразованных изображений приведены на фиг.18 кривыми а и b. Кривой с на фиг.18 обозначен логарифм максимального уровня амплитуд спектральной модели шума - порогового уровня шумов для анализа спектра сигнала, который получают в ходе калибровки для измерений. Логарифмы отношений амплитуд спектров изображений, превышающих пороговый уровень шумов, приведены на кривой а фиг.19. Найденные отношения модулей оптических передаточных функций для различных измеряемых расстояний изображены на фиг.20-а, 20-б, 20-в. Промежуточные кривые отношений минимальной к максимальной из двух величин: отношений модулей оптических передаточных функций, представленных на графиках 6 и 1 фиг.20-а, 20-б и отношений спектральных характеристик изображений, приведенных на графике а фиг.19, изображены на фиг.21 соответственно. В вычислениях данные указанных зависимостей используются в линейном масштабе. Кривая b фигуры 21 представляет указанные отношения для измеряемого расстояния S3, кривая а фигуры 21 - для измеряемого расстояния S8 и может быть получена из соотношения кривых а и b фиг.19. Для остальных измеряемых расстояний проводятся аналогичные вычисления указанных промежуточных кривых. Значения результирующей целевой функции для объекта с распределением яркости, приведенным на фиг.13, расположенного на расстоянии S0=S8, представлены на фиг.22.
После проведения цикла измерений производится оценка погрешности и исправления результатов произведенных измерений.
Сначала оценивается диапазон возможных положений объекта, например, следующим образом. Оценка диапазона возможных положений наблюдаемого объекта состоит в сравнении результатов проведенного измерения со статистическими характеристиками с учетом среднеквадратических отклонений целевых функций для диапазона измерений. За возможные положения объекта при измерениях для пары каналов принимают все положения, для которых нормированная по суммарному значению целевая функция пары каналов имеет локальные максимумы, а также принимает значения, превосходящие значения среднестатистической нормированной целевой функции пары каналов для диапазона измерений, уменьшенной на величину среднеквадратического отклонения среднестатистической нормированной целевой функции для диапазона измерений. Возможны другие реализации способа определения возможных положений объекта, например, без наложения требования о наличии локального экстремума целевой функции пары каналов. В случае если используется больше двух каналов формирования и фиксации изображений, сначала находят диапазоны возможных положений для всех различных пар каналов, а затем находят результирующий диапазон возможных положений как пересечение диапазонов возможных положений для пар каналов.
На кривой а фиг.35 изображена полученная в ходе измерений, но нормированная по суммарному значению целевая функция. На кривой b фиг.35 приведена среднестатистическая нормированная целевая функция для диапазона измерений, на кривой с - она же, уменьшенная на величину среднеквадратического отклонения для диапазона измерений. При применении указанного выше способа оценки диапазона возможных положений получаем точечную оценку диапазона, соответствующую расстоянию S8. Оценка погрешности в данном случае будет
Для объяснения способа исправления результатов измерений в случае, если оценка погрешности ненулевая, не обращаясь к схеме формирования данных, рассмотрим кривые, изображенные на фиг.33. На кривой а фиг.33 изображена полученная в ходе измерений, нормированная по суммарному значению целевая функция. На кривой b фиг.33 приведена среднестатистическая нормированная целевая функция для диапазона измерений, на кривой с -она же, уменьшенная на величину среднеквадратического отклонения для диапазона измерений. В данной ситуации диапазон возможных положений наблюдаемого объекта включает положения S3 и S8. Заметим, что в случае применения критерия максимума результирующей целевой функции без оценки погрешности и исправления измерений, мы получили бы измеряемое расстояние до объекта S0i=S3. Зная, что объект в действительности находится на расстоянии S8, погрешность измерений была бы значительной: 

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пассивного определения дальностей до объектов с изменяемой точностью по изображениям с трех цифровых видеокамер | 2024 |
|
RU2835007C1 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕФЕКТОВ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С ДВУМЯ ОПТОЭЛЕКТРОННЫМИ ДАТЧИКАМИ | 2008 |
|
RU2476914C2 |
| УСТРОЙСТВО И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ С ОБЕСПЕЧЕНИЕМ УВЕЛИЧЕННОЙ ГЛУБИНЫ ИЗОБРАЖАЕМОГО ПРОСТРАНСТВА (ВАРИАНТЫ) | 2021 |
|
RU2782980C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАССТОЯНИЯ МЕЖДУ МАЛОРАЗМЕРНЫМИ ОБЪЕКТАМИ | 2019 |
|
RU2734070C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПАНХРОМАТИЧЕСКИХ ИЗОБРАЖЕНИЙ (ВАРИАНТЫ) | 2011 |
|
RU2476926C1 |
| Способ получения и обработки изображений дистанционного зондирования Земли, искажённых турбулентной атмосферой | 2017 |
|
RU2653100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТНОГО ПРОФИЛЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА ОБЪЕМНОЙ ОБЛАСТИ ПРОСТРАНСТВА НА ОСНОВЕ АНАЛИЗА СВЕТОВОГО ПОЛЯ | 2020 |
|
RU2773390C2 |
| СПОСОБ ИССЛЕДОВАНИЯ МИКРООБЪЕКТОВ | 1998 |
|
RU2154815C2 |

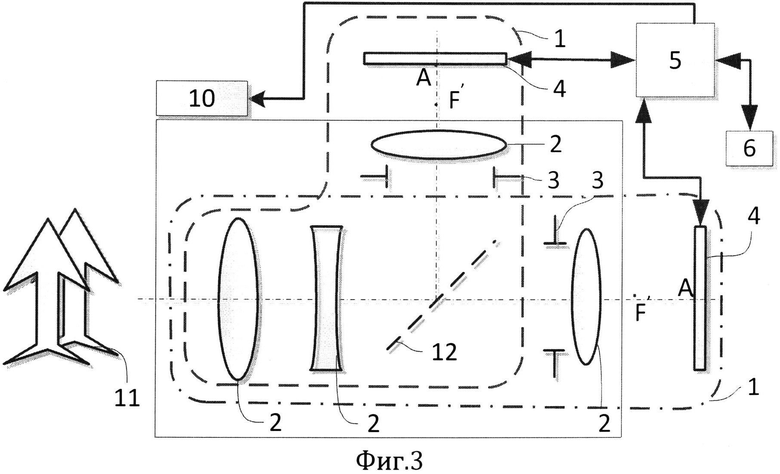
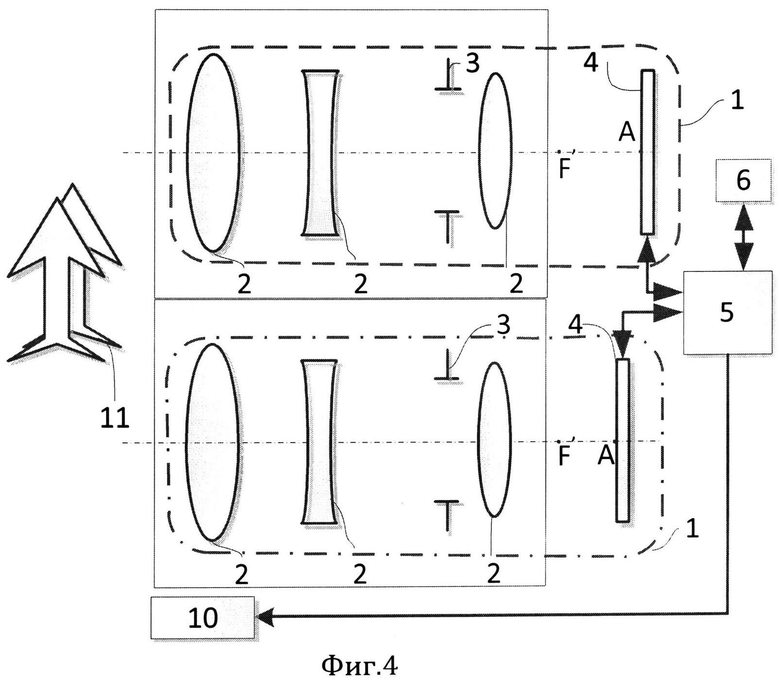


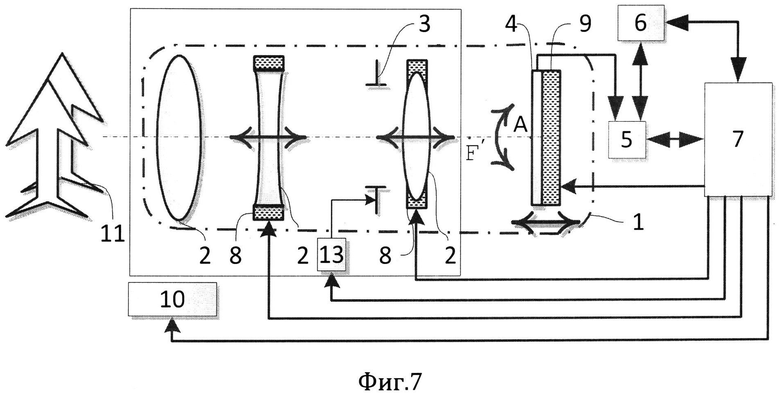
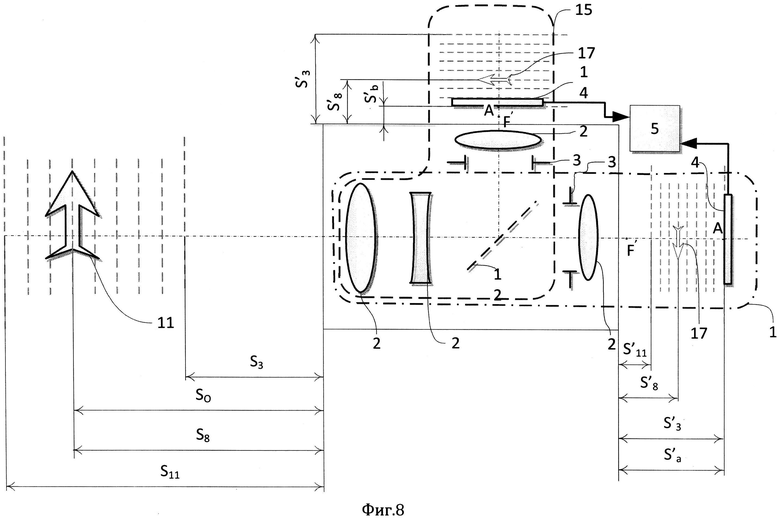
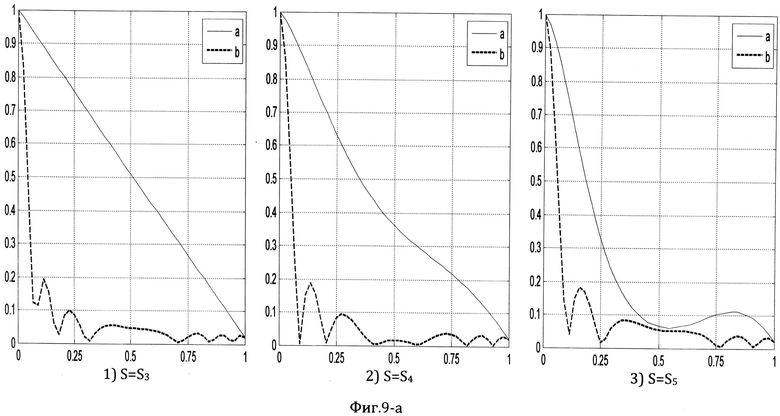

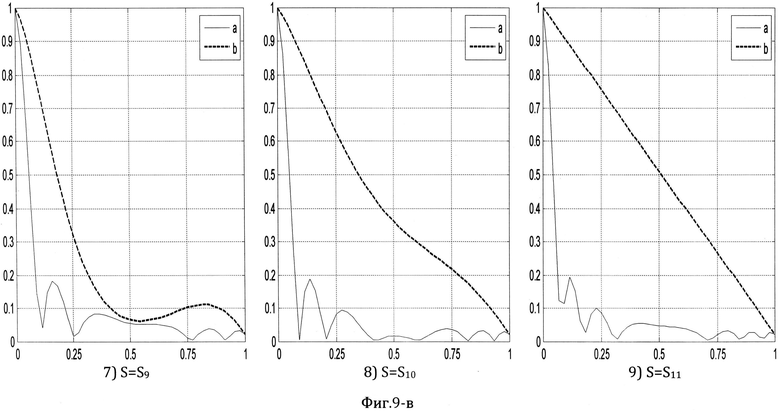

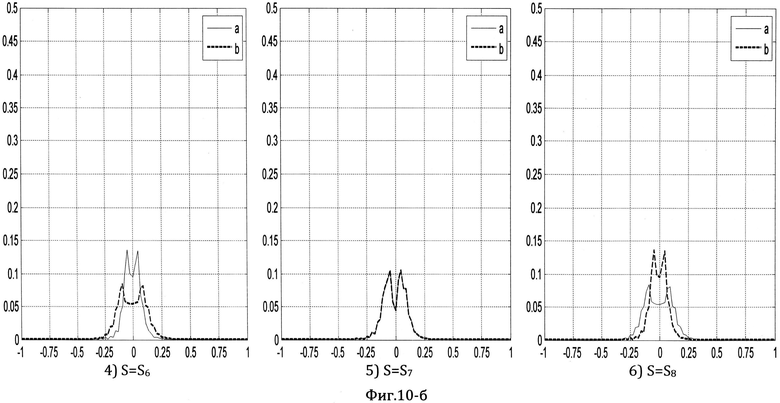



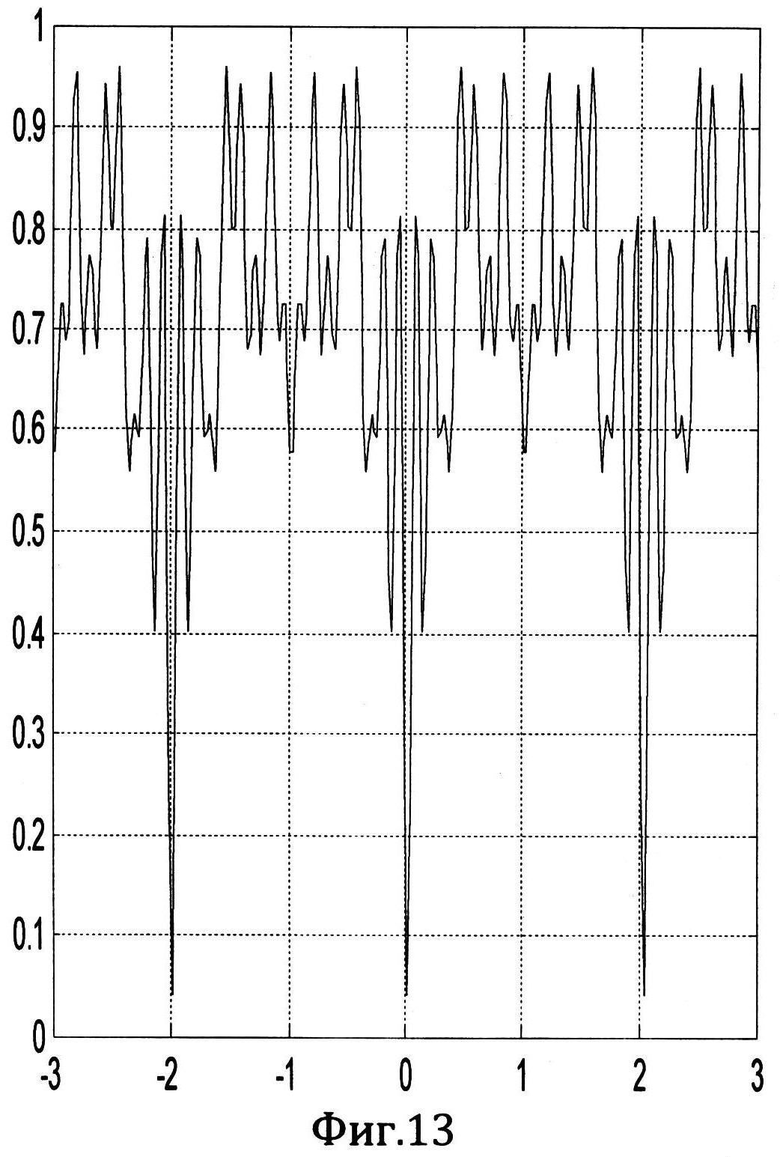
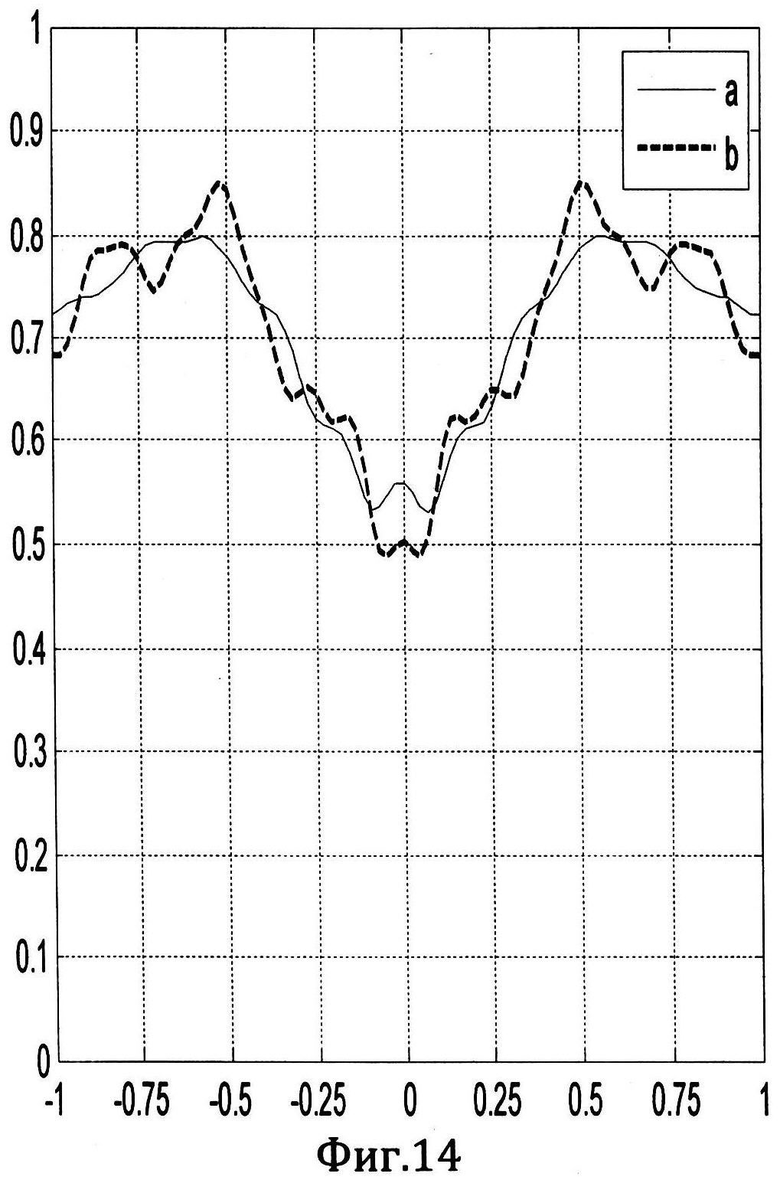
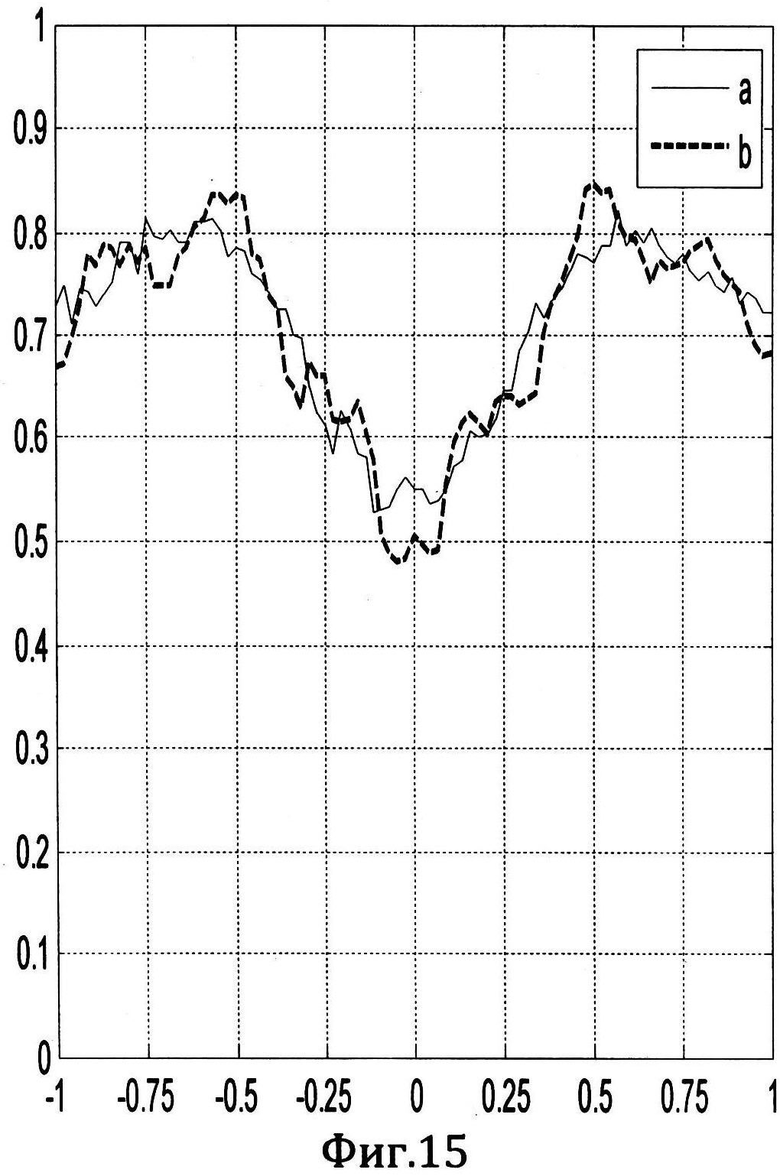

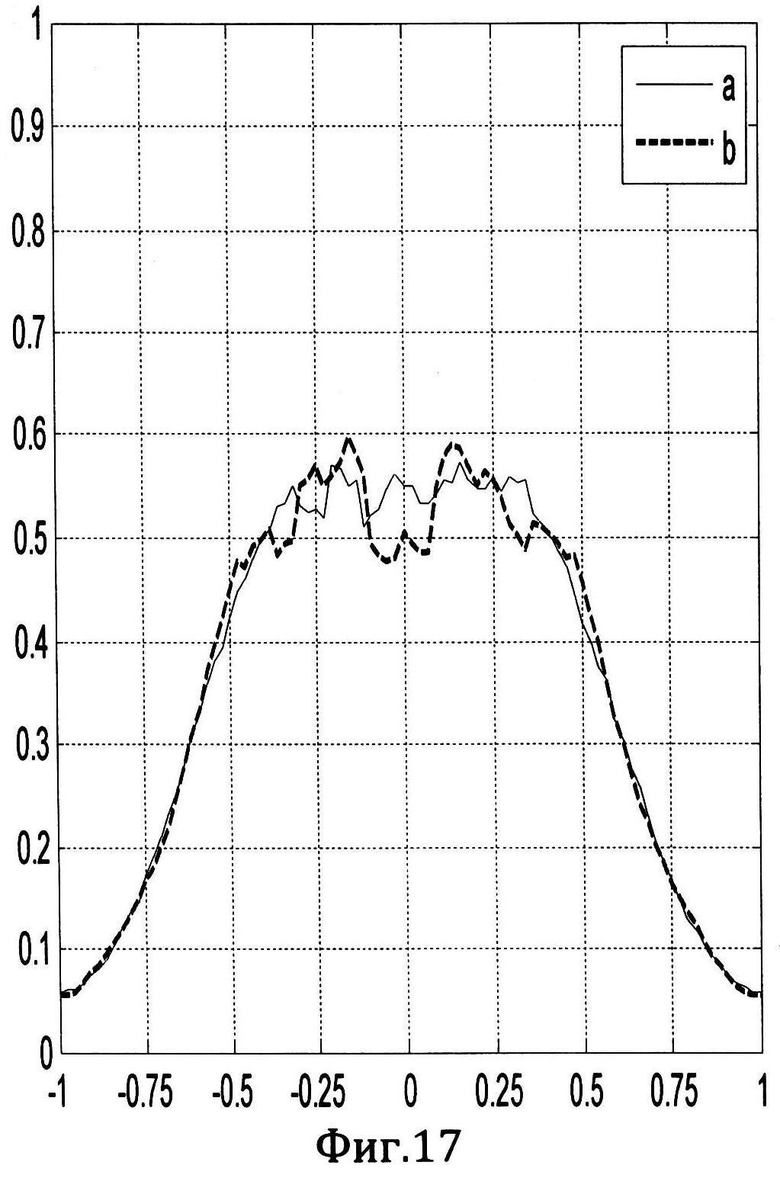




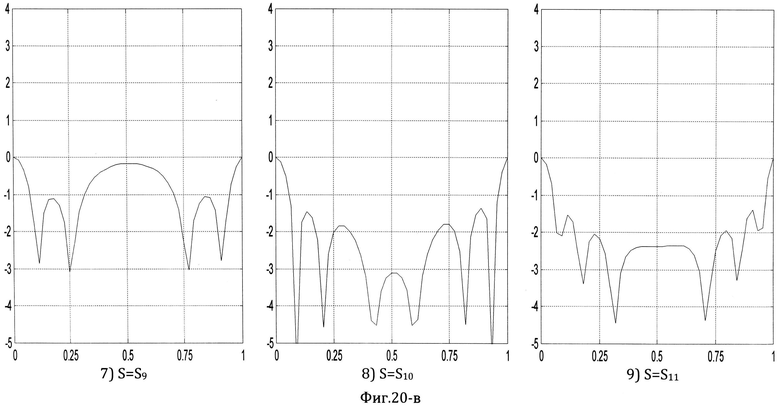



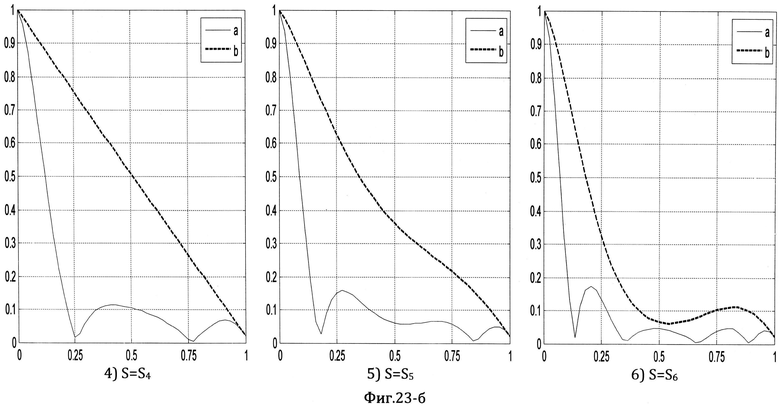




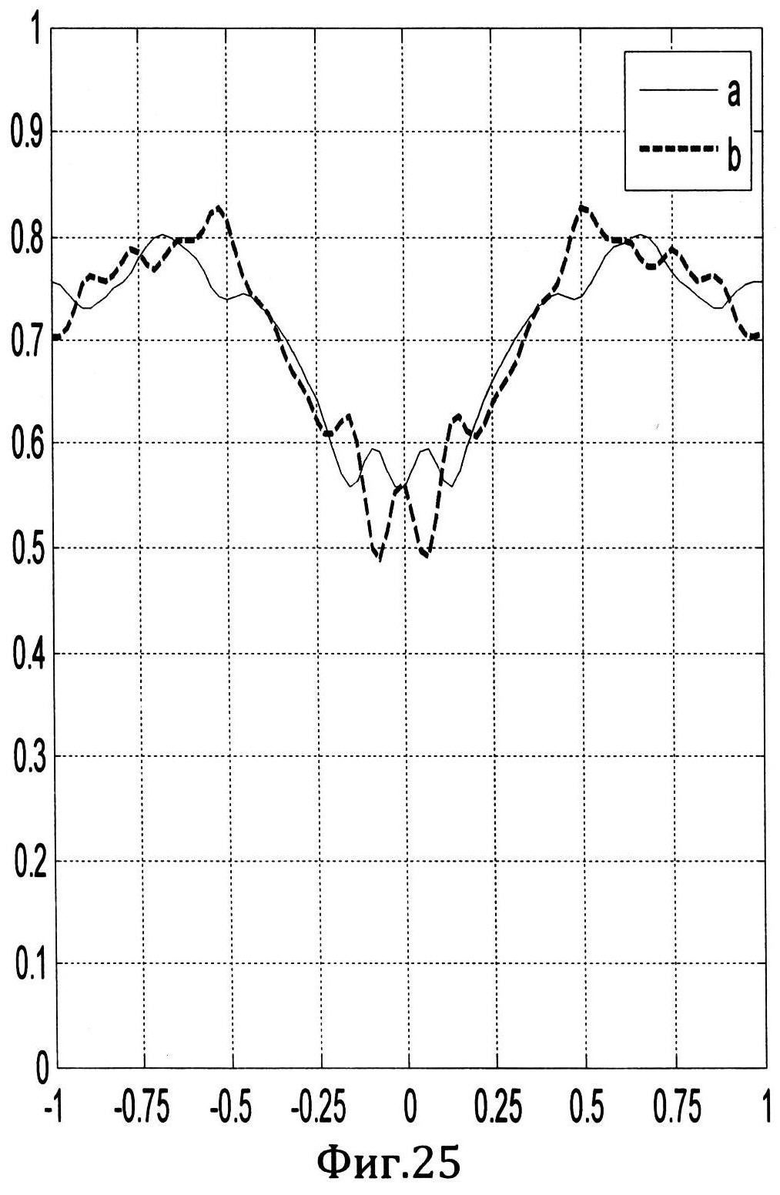




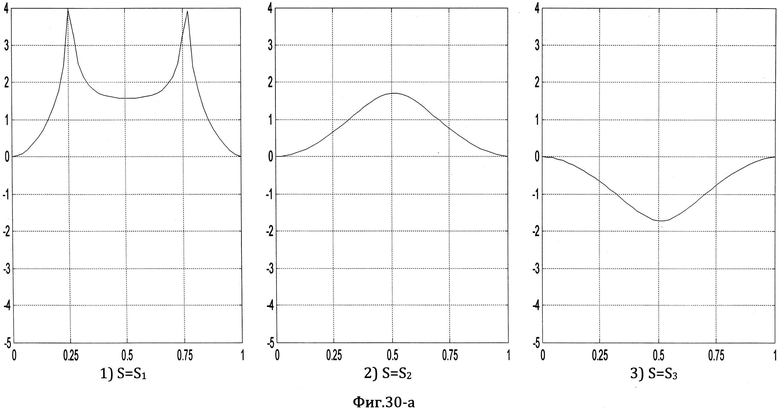






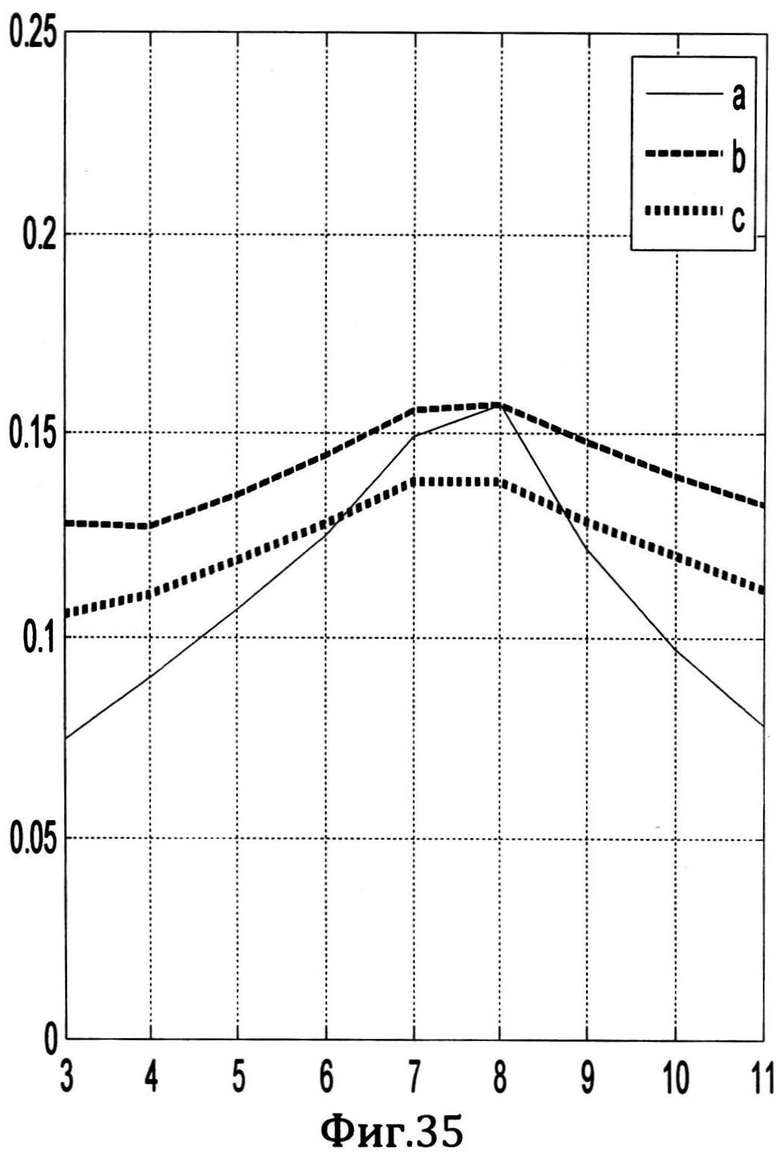


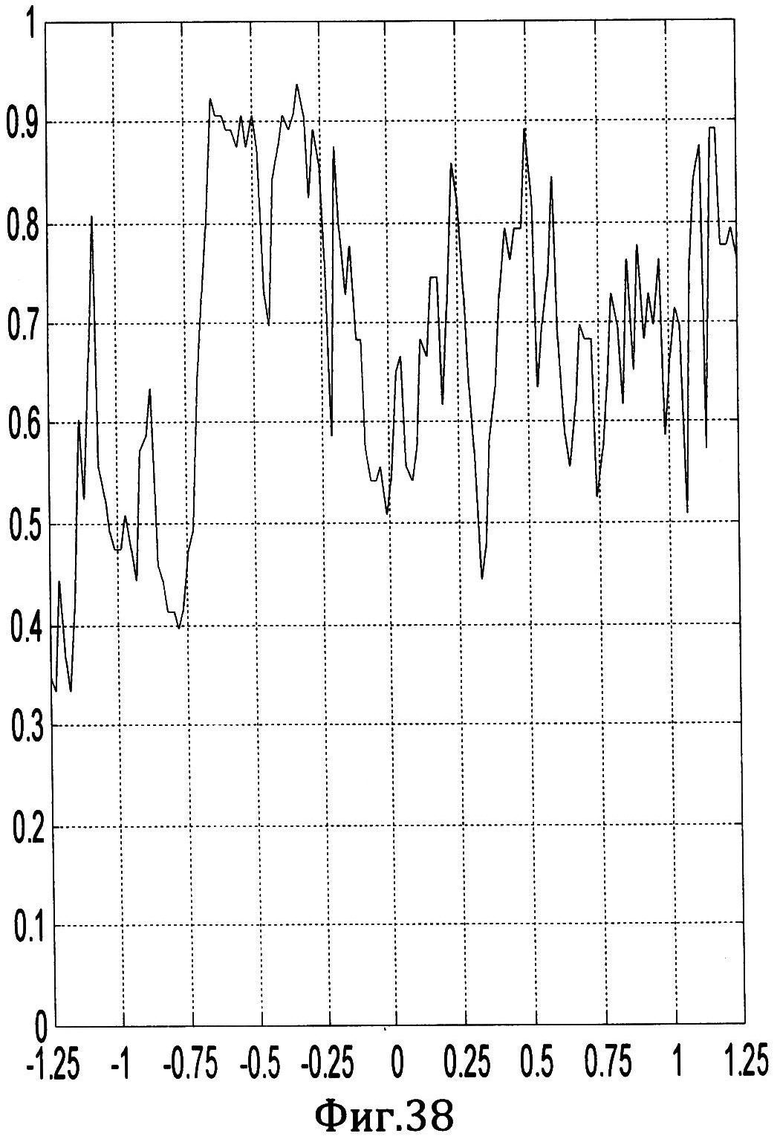
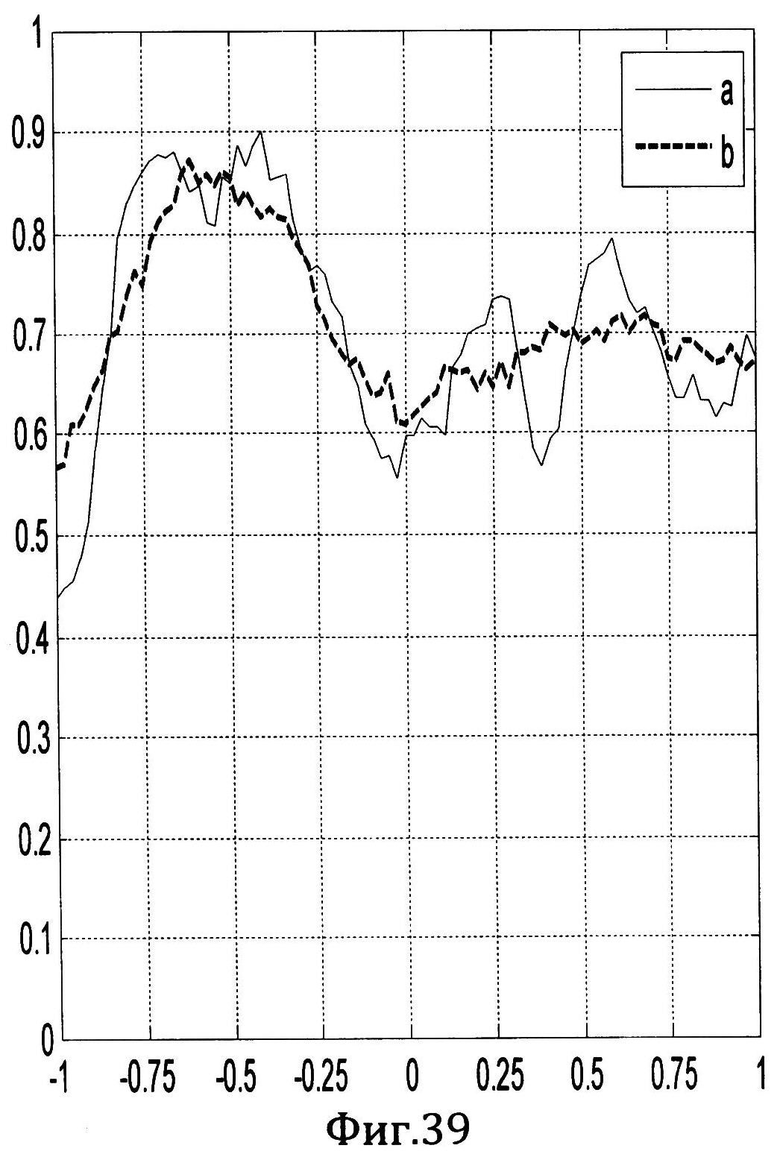
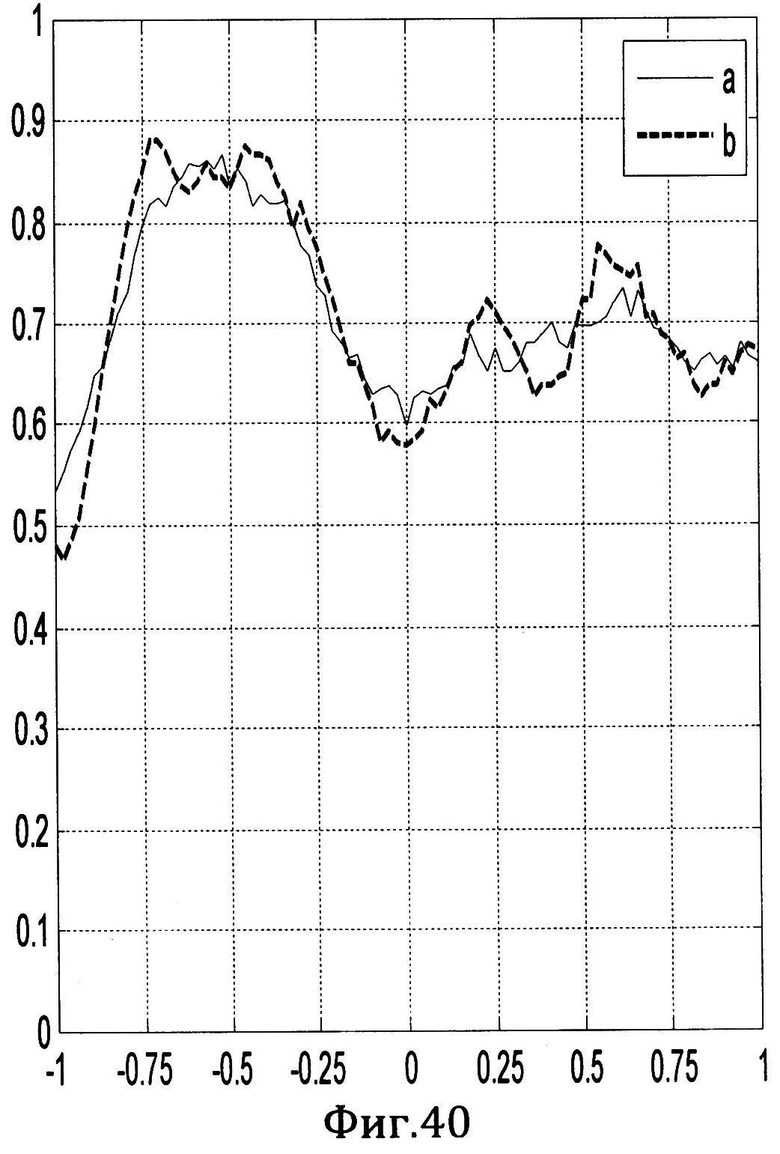
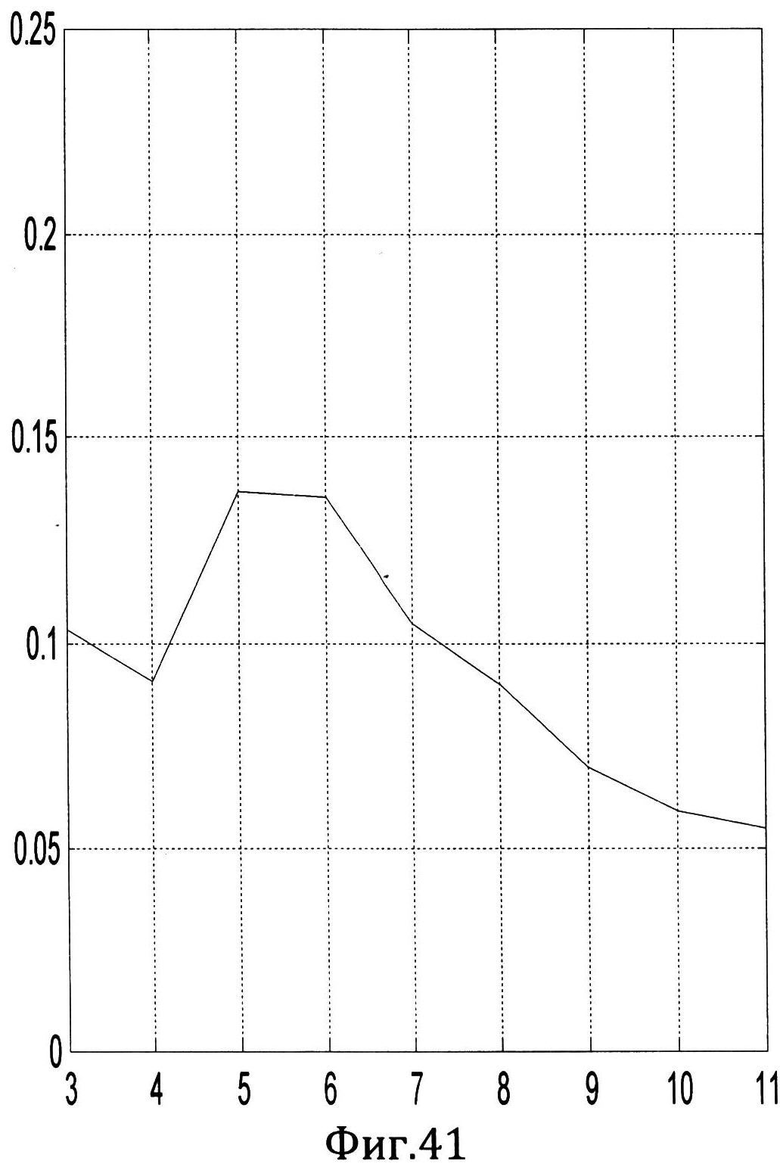


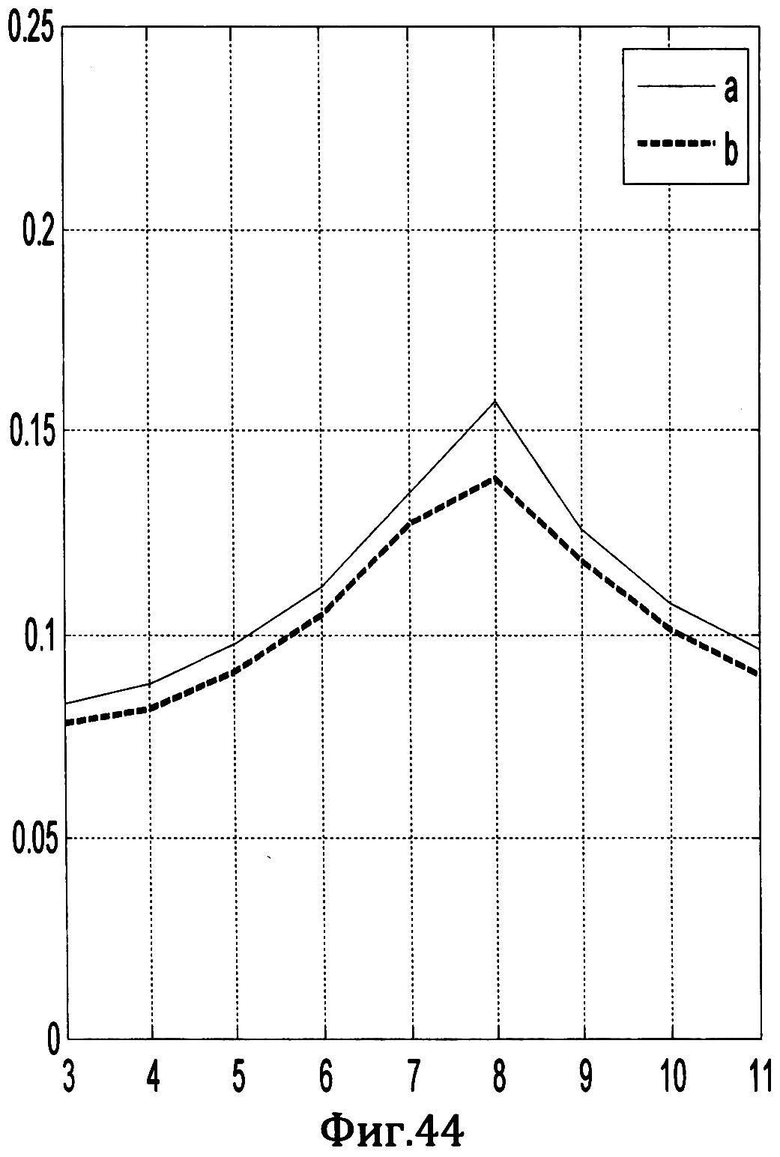
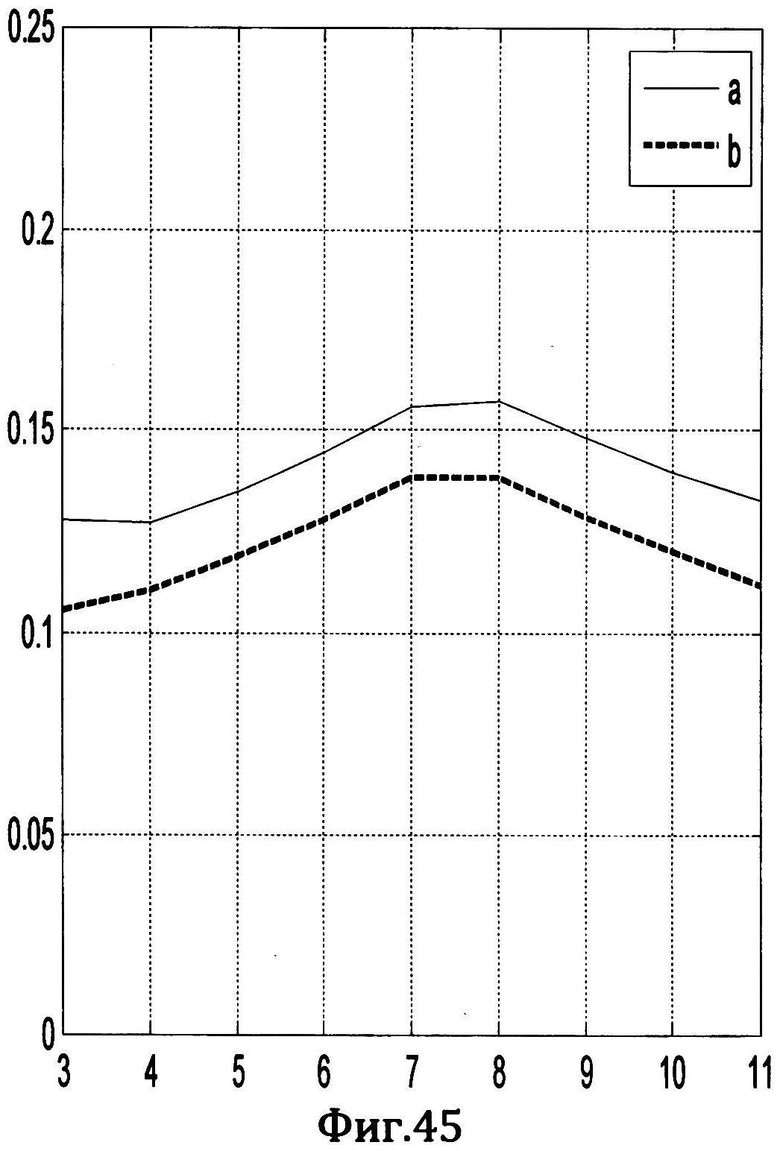
Изобретение относится к области формирования и обработки изображений, предназначено для измерения расстояний до наблюдаемых предметов и определения оптических передаточных функций устройства, при помощи которых сформированы обрабатываемые изображения, дополнительно позволяет оценивать погрешность измерений. Оптико-электронное устройство для определения оптических передаточных функций и измерения расстояний содержит не менее двух каналов формирования и фиксации изображения. При этом оптическая система каждого из каналов включает, по меньшей мере, одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображения, а также блок оценки расстояний, соединенный с детекторами. Причем один или более элементов оптический системы и/или, по меньшей мере, один детектор установлены с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы, отличного от соответствующих смещений детекторов других каналов, а устройство снабжено блоком оценки погрешностей и исправления результатов измерений, соединенный с блоком оценки расстояний. Технический результат - повышение точности измерения расстояний и определения оптических передаточных функций в широком диапазоне измерений. 7 н. и 12 з.п. ф-лы, 45 ил.
1. Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каналов формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений определяют измеряемое расстояние для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, отличающийся тем, что измеряют уровень шума детекторов изображений и сохраняют в памяти амплитуды спектральной модели распределения шумов детекторов изображения, осуществляют выбор оптимальных оптических передаточных функций для каждой рассматриваемой области изображений путем извлечения из памяти значений оптических передаточных функций для расстояний в пределах диапазона измерений, которые соответствуют положениям детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения, обработки областей изображений, в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисляют значения результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбирают оптимальные оптические передаточные функции, при которых указанная результирующая целевая функция принимает максимальное значение.
2. Способ по п.1, отличающийся тем, что при формировании и фиксации изображений формируют дополнительную освещенность наблюдаемых объектов.
3. Способ получения и обработки изображений для определения оптических передаточных функций и измерения расстояний оптико-электронным устройством, заключающийся в том, что формируют по меньшей мере два изображения по меньшей мере одного наблюдаемого объекта с различной степенью размытия, и фиксируют с помощью светочувствительных матричных детекторов, предварительно калибруют устройство путем измерения и сохранения в памяти значений оптических передаточных функций каждого канала формирования и фиксации изображений устройства для расстояний в пределах диапазона измерений, соответствующие положениям детекторов, оптических элементов и формам диафрагм, при которых формируются и фиксируются изображения, по выбору оптимальных оптических передаточных функций из оптических передаточных функций для расстояний в пределах диапазона измерений определяют измеряемое расстояние для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, отличающийся тем, что измеряют уровень шума детекторов изображений и сохраняют в памяти амплитуды спектральной модели распределения шумов детекторов изображения, осуществляют выбор оптимальных искажающих оптических передаточных функций для каждой рассматриваемой области изображений путем извлечения из памяти значений оптических передаточных функций для расстояний в пределах диапазона измерений, которые соответствуют положениям детекторов, оптических элементов и формам диафрагм, при которых были сформированы и зафиксированы изображения, обработки областей изображений, в процессе которой находят целевую функцию пар оптических передаточных функций для каждого сочетания зафиксированных изображений по два, значения которой определяются для каждого возможного измеряемого расстояния как сумма по всем пространственным частотам отношений модулей минимальной к максимальной из двух величин - отношения значений пространственных спектров изображений тех пространственных частот, для которых амплитуды значений обоих спектров превышают максимальные значения амплитуд спектральной модели шума, и отношений извлеченных из памяти значений пар соответствующих оптических передаточных функций, вычисляют значения результирующей целевой функции как средней арифметической величины значений целевых функций пар оптических передаточных функций, выбирают оптимальные оптические передаточные функции, при которых указанная результирующая целевая функция принимает максимальное значение, находят диапазон возможного положения наблюдаемого объекта для каждой рассматриваемой области изображений, затем исправляют измеренное расстояние, заменяют оптимальные оптические передаточные функции, а также определяют погрешность измерений, если погрешность измерений больше допустимой, перемещают один или более оптических элементов и/или по меньшей мере один детектор и/или изменяют форму по меньшей мере одной диафрагмы на величину, которая определяется на основе состава пространственного спектра участков зафиксированных изображений и данных предварительной калибровки устройства и позволяет уменьшить погрешность измерений, а затем производят один или серию циклов измерения расстояний.
4. Способ по п.3, отличающийся тем, что при формировании и фиксации изображений формируют дополнительную освещенность наблюдаемых объектов.
5. Способ определения погрешности и исправления результатов проведенных измерений оптико-электронного устройства, заключающийся в том, что по результатам обработки пары и более изображений, сформированных с различной степенью размытия для каждой области по меньшей мере одного наблюдаемого объекта, которым соответствуют области изображений, осуществляют выбор оптимальных оптических передаточных функций каналов формирования и фиксации изображений из оптических передаточных функций для расстояний в пределах диапазона измерений, при которых целевая функция оптимизации имеет глобальный экстремум, определяют измеряемое расстояние как расстояние, при котором устройство обладает выбранными оптимальными оптическими передаточными функциями, где значения оптических передаточных функций измеряются при проведении предварительной калибровки и сохраняются в памяти, для каждой рассматриваемой области находят диапазон возможного положения наблюдаемых объектов путем сравнения целевых функций различных сочетаний пар каналов, полученных при измерениях, со значениями среднестатистических целевых функций пар каналов, уменьшенных на величину, пропорциональную среднеквадратическим отклонениям значений целевых функций для диапазона измерений, полученными при калибровке устройства для уровня шума, соответствующего шуму детекторов при фиксации изображений, затем исправляют измеренное расстояние, заменяя его на расстояние, соответствующее середине диапазона возможного положения наблюдаемого объекта, и заменяют оптимальные оптические передаточные функции на оптические передаточные функции, которыми устройство обладает при данном расстоянии, а также определяют погрешность измерений как половину диапазона возможного положения наблюдаемого объекта, дополнительно предварительно калибруют устройство для различных уровней шума детекторов изображений, используя в качестве калибровочных мишеней задаваемые распределения яркости, расположенные на известном расстоянии от устройства посредством нахождения целевых функций и вычисления по ним значений среднестатистических целевых функций и среднеквадратических отклонений целевых функций от среднестатистических целевых функций пар каналов для диапазона измерений.
6. Оптико-электронное устройство для определения оптических передаточных функций и измерения расстояний, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний, соединенный с детекторами, отличающееся тем, что один или более элементов оптической системы установлены с возможностью перемещения вдоль оптической оси и/или по меньшей мере один детектор установлен с возможностью перемещения вдоль оптической оси и/или вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы, отличного от соответствующих смещений детекторов других каналов, и/или по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы, а устройство снабжено блоком оценки погрешностей и исправления результатов измерений, соединенным с блоком оценки расстояний, и блоком регулировки взаимного смещения детекторов, положений элементов оптической системы и форм диафрагм, соединенным с блоком оценки расстояний и блоком оценки погрешностей и исправления результатов измерений.
7. Оптико-электронное устройство по п.6, отличающееся тем, что оси полей зрения каналов формирования и фиксации изображений не совпадают друг с другом и установлены параллельно или образуют угол конвергенции.
8. Оптико-электронное устройство по п.6, отличающееся тем, что оно дополнительно включает по меньшей мере один светоделитель.
9. Оптико-электронное устройство по п.6, или 7, или 8, отличающееся тем, что оно снабжено источником оптического излучения, предназначенного для формирования освещения наблюдаемого объекта.
10. Оптико-электронное устройство для определения оптических передаточных функций и измерения расстояний, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний, соединенный с детекторами, отличающееся тем, что один или более элементов оптической системы и/или по меньшей мере один детектор установлены с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы, отличного от соответствующих смещений детекторов других каналов, а устройство снабжено блоком оценки погрешностей и исправления результатов измерений, соединенным с блоком оценки расстояний.
11. Оптико-электронное устройство по п.10, отличающееся тем, что оси полей зрения каналов формирования и фиксации изображений не совпадают друг с другом и установлены параллельно или образуют угол конвергенции.
12. Оптико-электронное устройство по п.10, отличающееся тем, что оно дополнительно включает по меньшей мере один светоделитель.
13. Оптико-электронное устройство по п.10, или 11, или 12, отличающееся тем, что оно снабжено источником оптического излучения, предназначенного для формирования освещения наблюдаемого объекта.
14. Оптико-электронное устройство для определения оптических передаточных функций и измерения расстояний, содержащее не менее двух каналов формирования и фиксации изображений, оптическая система каждого из каналов включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для каждого канала формирования и фиксации изображений, блок оценки расстояний, соединенный с детекторами, отличающееся тем, что один или более элементов оптической системы и/или по меньшей мере один детектор установлены с обеспечением смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы, отличного от соответствующих смещений детекторов других каналов.
15. Оптико-электронное устройство по п.14, отличающееся тем, что оси полей зрения каналов формирования и фиксации изображений не совпадают друг с другом и установлены параллельно или образуют угол конвергенции.
16. Оптико-электронное устройство по п.14, отличающееся тем, что оно дополнительно включает по меньшей мере один светоделитель.
17. Оптико-электронное устройство по п.14, или 15, или 16, отличающееся тем, что оно снабжено источником оптического излучения, предназначенного для формирования освещения наблюдаемого объекта.
18. Оптико-электронное устройство для определения оптических передаточных функций и измерения расстояний, содержащее один канал формирования и фиксации изображений, оптическая система которого включает по меньшей мере одну диафрагму, матричный светочувствительный детектор для фиксации изображений, блок оценки расстояний, соединенный с детектором, отличающееся тем, что один или более элементов оптической системы установлены с возможностью перемещения вдоль оптической оси и/или детектор установлен с возможностью перемещения вдоль оптической оси или вращения вокруг точки пересечения оптической оси со светочувствительной поверхностью детектора с обеспечением различной величины смещения светочувствительной поверхности детектора относительно заднего фокуса оптической системы и/или по меньшей мере одна диафрагма выполнена с возможностью изменения ее формы, а устройство снабжено блоком оценки погрешностей и исправления результатов измерений, соединенным с блоком оценки расстояний, и блоком регулировки смещения детектора, положений элементов оптической системы и форм диафрагм, соединенным с блоком оценки расстояний и блоком оценки погрешностей и исправления результатов измерений.
19. Оптико-электронное устройство по п.18, отличающееся тем, что оно снабжено источником оптического излучения, предназначенного для формирования освещения наблюдаемого объекта.
| US 7831358 B2, 09.11.2010 | |||
| US 20120069320 A1, 22.03.2012 | |||
| US 20110285982 A1, 24.11.2011 | |||
| WO 1998020301 A1, 14.05.1998 |

