Изобретение относится к методам фото и видео наблюдения, а более конкретно, к оптическим стереоскопическим способам определения местонахождения объектов в окружающем пространстве, включающего определение расстояний до интересующих объектов и их угловых координат. Изобретение применимо, например, в автоматических системах определения местонахождения объектов в окружающем пространстве, и в частности в средствах контроля местоположения удаленных объектов космического пространства.
Предшествующий уровень техники
1. Известен способ определения температурных деформаций образца и устройство для его осуществления [1]. Способ заключается в том, что регистрация и модуляция изображения световых меток осуществляется в оптико-электронной системе путем перемещения штриховой решетки перпендикулярно направлению пучков лучей света. Данный способ позволяет с высокой точностью определять расстояние между, источниками пучков лучей, т.е. световыми метками (источниками) с заранее неизвестной яркостью в условиях фоновых засветок.
Недостатками способа являются: узкий диапазон расстояний взаимного расположения световых меток (источников), необходимость настройки измерительной системы в диапазон пространственного расположения световых меток (источников), невозможность непосредственного определения расстояний между метками в направлении угла визирования оптико-электронной системы, сравнительно низкое быстродействие и надежность системы из-за наличия узла механической модуляции штриховой решетки.
2. Известен способ определения расстояний между малоразмерными световыми метками (источниками) оптико-электронной системой на основе фазово-растровых измерений, позволяющих определять координаты световых источников от лазерных целеуказателей [2], заключающийся в том, что световые источники проецируются оптической системой на матричный фотоприемник (матрицу фотодиодов), на основе алгоритма суммирования сигналов с фотодиодов приемника получают последовательность выборок сигналов в области каждого малоразмерного объекта, представляющего собой световую метку, на основании сравнения полученных выборок сигналов, по степени их корреляции определяют расстояние между световыми метками. С целью расширения яркостного динамического диапазона световых меток, снижения уровня насыщения фотодиодов приемника, а также для повышения точности измерения их координат в указанном способе используют дополнительную оптическую систему, формирующую на матрицу серию дублирующих смещенных изображений световых меток. Результаты измерений уточняются путем усреднения измерений в изображениях соответствующих основных и дублирующих световых меток.
Недостатками способа является узкий диапазон взаимного положения световых меток, значительная погрешность, связанная с дискретностью и шовностью матрицы фотодиодов приемника, и ошибки, связанные с оптическими аберрациями оптической системы при формировании изображения области наблюдаемого пространства, необходимость настройки измерительной системы в диапазон расположения световых меток, а также ограниченные возможности определения расстояний вдоль угла визирования оптической системы.
3. Известен способ для определения местонахождения объекта в окружающем пространстве [3]. Способ заключается в формировании оптико-электронной системой на плоскости многоэлементного фотоприемника, входящего в состав оптико-электронной системы, двух панорамных изображений, фиксировании на каждом изображении наблюдаемый под заданным ракурсом образ интересующего участка окружающего пространства с находящимся в нем объектом, регистрации сформированных изображений, определении местонахождения объекта с оценкой расстояния до него и определении расстояния до объекта по взаимному расположению двух его образов на одновременно зарегистрированной паре разнесенных панорамных изображений.
Недостатками способа является нецелесообразность наблюдения малоразмерных световых объектов, вследствие низкой разрешающей способности многоэлементного фотоприемника, так как в плоскости одного фотоприемника одновременно формируются два панорамных изображения, что приводит к недостаточному количеству пикселей, приходящихся на единицу площади обозреваемого пространства. При этом, если использовать фотоприемник с большим количеством пикселей, то снижается уровень быстродействия вследствие увеличения объема регистрируемой и передаваемой информации, что не позволяет обеспечить наблюдение за перемещающимися объектами (образы объектов на изображениях получаются смазанными или отсутствуют по причине выхода за границы зоны обзора оптической системы). Кроме того, селекция объекта на изображении производится методами контурного анализа (например, методом дискретных разностей с использованием оператора Собеля) без осуществления дополнительных операций по подавлению фона, что влечет снижение достоверности селекции объекта в условиях неоднородного фона.
В качестве прототипа выбран способ идентификации и определения взаимного положения световых меток, в том числе при их частичном наложении, оптико-электронной системой контроля [4], заключающийся в том, что световые объекты проецируются оптической системой на матричный фотоприемник (матрицу фотодиодов), и на основе алгоритма суммирования произведения сигналов получаемых от фотоприемника с масштабируемой сдвигаемой вдоль выбранного направления, и на основе заданной функции формируют выборку сигналов содержащую информацию обо всех световых объектах в области наблюдения, а по разности координат экстремумов сформированной выборки сигналов определяют расстояние между наблюдаемыми световыми объектами (метками).
Недостатками прототипа является ограничения по точности определения координат малоразмерных объектов (световых источников), вследствие низкой разрешающей способности фотоприемника в области малоразмерных объектов, так как на плоскости фотоприемника одновременно формируются несколько изображений, что приводит к недостаточному количеству пикселей, приходящихся на единицу каждого малоразмерного объекта. При этом, если использовать фотоприемник с большим количеством пикселей или несколько фотоприемников, то снижается уровень быстродействия вследствие увеличения объема обработки получаемой информации, что не позволяет обеспечить наблюдение за перемещающимися объектами в режиме реального времени. Кроме того, в прототипе селекция объекта производится методом анализа бинарных кластеров, сформированных из их изображений, без осуществления дополнительных операций по улучшению качества изображения, что приводит к снижению достоверности селекции объектов в условиях неоднородного фона.
Задачей, на решение которой направлено предлагаемое изобретение, заключается в определении расстояния между малоразмерными объектами, представляющих собой световые источники, в окружающем пространстве, находящихся в зоне поля зрения оптико-электронной системы, в широком диапазоне их взаимного положения, с более высокой точностью и достоверностью.
Сущность изобретения заключается в том, что интересуемый участок окружающего пространства наблюдают составной оптической системой (часть оптико-электронной системы) [11], формирующей массив субапертурных изображений в плоскости фотоприемника. В процессе формирования массива субапертурных изображений в плоскости фотоприемника регистрируются совокупности хода лучей по направлениям их распространения в оптико-электронную систему и их пространственные координаты, что обеспечивает получение объемных параметров наблюдаемых объектов (XO, YO, ZO) (координаты в пространстве) [8], характеризующихся распределением яркости в плоскости перпендикулярной оси визирования оптико-электронной системы (XO, YO) [2], а также расстоянием этой плоскости до оптико-электронной системы (по оси ZO) [3]. Указанное действие достигается на основе использования составной оптической системой, включающей основной проектирующий объектив и дополнительную матричную оптическую систему, состоящей из массива микролинз расположенного после основного проектирующего объектива перед матричным фотоприемником [9]. Панорамные полноразмерные изображения объектов формируются алгоритмически из массива субапертурных изображений с алгоритмически изменяемым углом визирования оптической системы и расстоянием ее фокусировки до объекта, при этом изменение угла визирования осуществляют алгоритмически на базе правила суммирования сигналов с фотодиодов фотоприемника соответствующих направлению хода лучей. Суммирование изображений в наборе с алгоритмически изменяемыми углами визирования обеспечивает увеличение числа значимых пикселей в области изображений малоразмерных объектов [8], что дает повышение точности измерения расстояний между малоразмерными объектами по максимумам кривых непрерывного вейвлет преобразования.
Технический результат изобретения заключается в повышении точности определения расстояния между малоразмерными объектами и разрешающей способности для объектов при наложении их изображений в плоскости фотоприемника, что позволяет определять с большей точностью расстояние между объектами в зоне контроля и перемещение объектов на неоднородном фоне. Формирование набора стереоскопических изображений для серии углов визирования с большой разрешающей способностью, приводит к увеличению точности определения расстояния между наблюдаемыми малоразмерными объектами и увеличении достоверности измерения за счет селективного подавления локальной неоднородности образа малоразмерного объекта путем вариации пиксельной структуры при изменении угла визирования, компенсации погрешности масштабирования путем возможной калибровки оптической системы [5], перепикселизации в области градиента контраста границ малоразмерного объекта, возможность частичного выделения и удаления неоднородного фона на зарегистрированном изображении.
Для достижения технического результата предлагается способ высокоточного определения расстояний между малоразмерными объектами в окружающем пространстве. Способ включает в себя формирование на плоскости многоэлементного фотоприемника набора малоразмерных панорамных изображений, содержащих в каждом изображении наблюдаемые под заданными ракурсами образы интересующего участка окружающего пространства с находящимся в нем малоразмерными объектами. Синтез серии полноформатных изображений, соответствующих разным углам визирования оптической системы, позволяет определить местонахождение малоразмерных объектов в каждом панорамном изображении с оценкой расстояния до них. При этом определение расстояния до малоразмерных объектов осуществляется по их нахождению в слоях пространства разрешаемой оптической системой.
Согласно изобретению, наблюдают интересующий участок окружающего пространства оптической системой переноса изображения в плоскость матричного фотоприемника, состоящей из проектирующего объектива и массива микролинз (NxM), расположенных перед матричным фотоприемником (рис. 1). Это обеспечивает получение на матрице фотодиодов массива субапертурных изображений 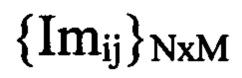 , координаты отображаемых точек (х, у) определяются формулой (1):
, координаты отображаемых точек (х, у) определяются формулой (1):

где I (расстояние массива микролинз до матрицы фотодиодов) и L (расстояние от объектива до массива микролинз) - конструктивные параметры оптической схемы, (X Y) - координаты в системе координат в плоскости линзы, (х, у) -координаты изображения точек объекта (световой метки) в системе координат в плоскости фотоприемника, Z - расстояние от плоскости формируемого изображения (плоскости фотоприемника) до оптико-электронной системы.
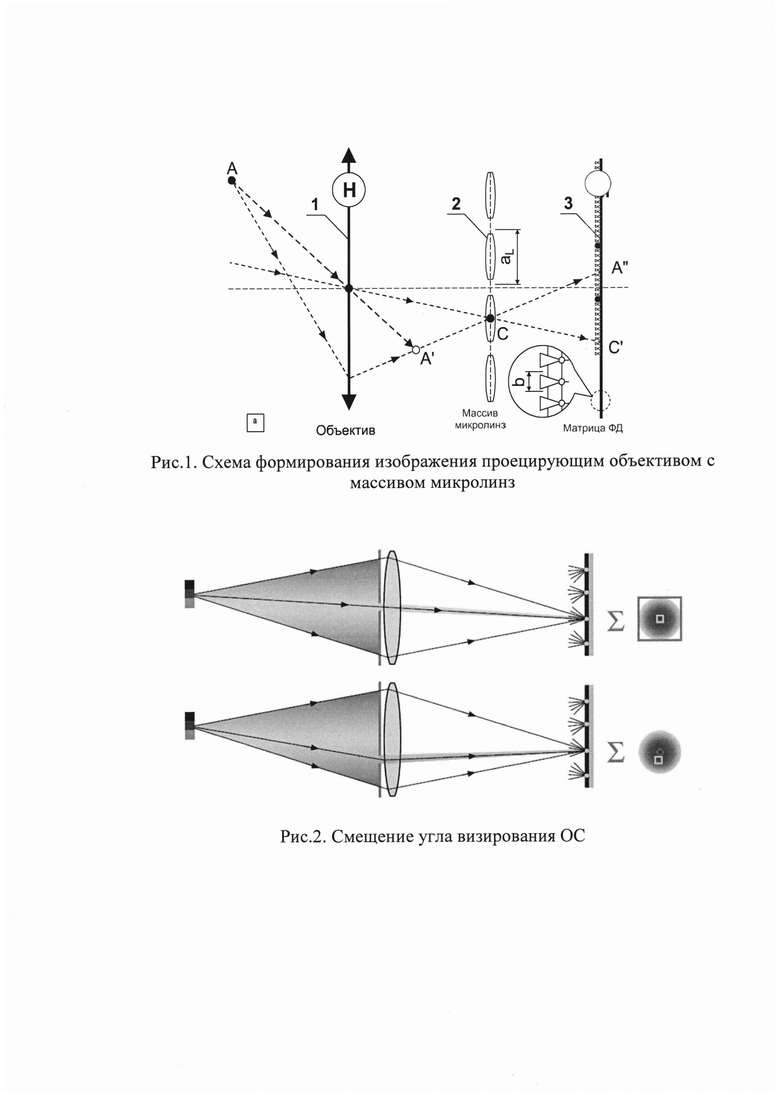
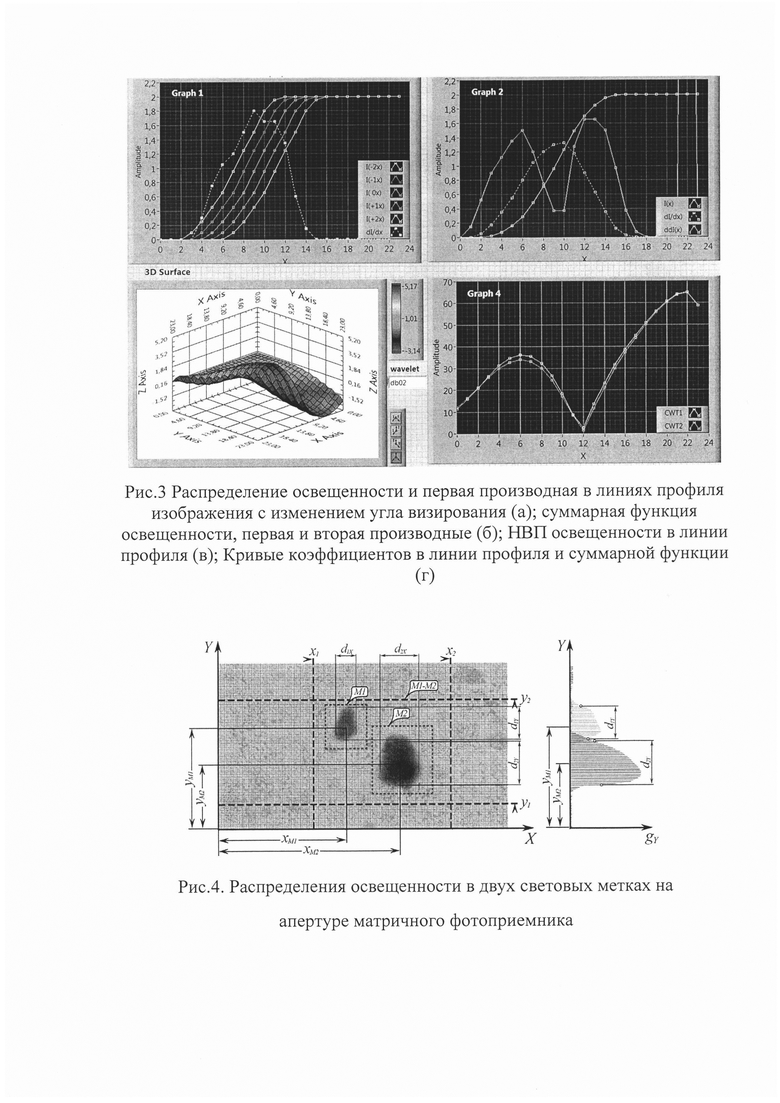
Из массива субапертурных изображений синтезируют полноформатные изображения Imk(х,у) наблюдаемого пространства (рис. 2) известным алгоритмом [6], которые фотоприемником представляются двухмерной выборкой сигналов  . Для обеспечения большей точности определения относительных координат световых меток расширяют границу градиента яркости световых меток путем суммирования ряда изображений Imk(х,у) с различными алгоритмически изменяемыми углами визирования Im(x,y)=Σ Imk(x+q⋅Δx,y+p⋅Δy) (рис. 3, 4, 5), что позволяет обеспечить более высокую точность определения координат малоразмерного объекта в пространстве алгоритмом непрерывного вейвлет преобразования (НВП), который сканирует полученные полноформатные изображения наблюдаемого пространства (2), вдоль заданной координаты С(а,ξ) в каждом масштабе (а) и смещении в заданном направлении (ОХ - ξ) выбранной функции преобразования ψ(х):
. Для обеспечения большей точности определения относительных координат световых меток расширяют границу градиента яркости световых меток путем суммирования ряда изображений Imk(х,у) с различными алгоритмически изменяемыми углами визирования Im(x,y)=Σ Imk(x+q⋅Δx,y+p⋅Δy) (рис. 3, 4, 5), что позволяет обеспечить более высокую точность определения координат малоразмерного объекта в пространстве алгоритмом непрерывного вейвлет преобразования (НВП), который сканирует полученные полноформатные изображения наблюдаемого пространства (2), вдоль заданной координаты С(а,ξ) в каждом масштабе (а) и смещении в заданном направлении (ОХ - ξ) выбранной функции преобразования ψ(х):

где ψ(х) - функция обладающая свойствами: среднее значение равно нулю, обладает свойствами масштабируемости и координатного сдвига х.
По максимумам коэффициентов НВП D(ξ) (3) [6] определяют относительные координаты каждого малоразмерного источника (i) вдоль каждого выбранного направления (j) (4,5) [7, 8], разница которых определяет расстояние dik между малоразмерными источниками (i) и (k):



В общем случае для кривых коэффициентов НВП [7] для заданной функции ψ(х), имеющих несколько максимумов или минимумов dn, линейный размер dik может определяться может определяться по разным максимумам или с большей точностью по совокупности соответствующих экстремумов (максимумам или минимумам) кривых коэффициентов НВП D(x) несколькими способами (6) [8]:

здесь n - число максимумов (определяется типом функции ψ(х), расстоянием), ai - амплитуда максимумов коэффициентов НВП, который в формуле (6) используется как весовой коэффициент (чем меньше амплитуда, тем выше ошибка дискретизации).
Подтверждение результатов проводилось на разработанном виртуальном приборе [10] для моделирования распределения освещенности в сдвинутых световых метках (рис. 6, 7).
В располагаемых источниках информации не обнаружено технических решений, содержащих в совокупности признаки, сходные с отличительными признаками заявляемого способа. Следовательно, изобретение соответствует критерию изобретательский уровень.
Наличие новых существенных признаков совместно с известными и общими с прототипом позволило создать новое техническое решение - способ измерения пространственного расстояния между малоразмерными объектами. Способ решает комплексно задачу увеличения скорости и надежности обработки сигнала при сохранении высокой обзорности и обеспечении увеличения разрешающей способности.
Источники информации
1) Патент №1392354 от 30.04.1988, кл. G01B 11/16. Способ определения температурной деформации образца и устройство для его осуществления, авторы: В.Е. Махов, А.И. Потапов, (СССР). - №1392354; Заявл. 24.03.1986; Опубл. 30.04.88, Бюл. №16.
2) Махов В.Е. Влияние характеристик лазерных целеуказателей на точность измерения их координат // Труды Двенадцатой Всероссийской научно-практической конференции РАРАН: Актуальные проблемы защиты и безопасности, (1-3 апреля 2009 г.), том 3. - СПб: НПО Специальных материалов, 2009. - С. 281-288.
3) Патент РФ №2420774 от 04.02.2009, кл. G03B 37/04, G02B 13/06. Способ для определения местонахождения объекта в окружающем пространстве и панорамная аппаратура для реализации способа, авторы: Подгорнов В.А., Подгорнов С.В., Щербина А.Н.
4) Способ идентификации и определения положения световых меток при их наложении в системах оптического контроля Контроль. Диагностика. 2019. №7 (253). С. 4-13, авторов Махов В.Е., Широбоков В.В., Потапов А.И.
5) Bok Y., Jeon H.-G., Kweon I. S. Geometric Calibration of Micro-Lens-Based Light-Field Cameras using Line Features // IEEE Transactions on Pattern Analysis and Machine Intelligence. 2017. Vol. 39 / Issue 2. pp. 17-61.
6) Ng R. Digital light field photography. A dissertation submitted to the department of computer science and the committee on graduate studies of Stanford university in partial fulfillment of the requirements for the degree of doctor of philosophy, 2006.
7) Махов В.E. Исследование алгоритмов вейвлет - преобразования для определения координат световых меток // Вопросы радиоэлектроники. Серия «Техника телевидения», вып. 2. - СПб.: ФГУП НИИТ, 2012. - С. 78-89.
8) Грузман И.С. Цифровая обработка изображений в информационных системах: Учебное пособие / И.С. Грузман, B.C. Киричук, В.П. Косых, [и др.] - Новосибирск: Изд-во НГТУ, 2000. - 168 с.
9) Махов В., Потапов А., Закутаев А. Принципы работы цифровых камер светового поля с массивом микролинз // Компоненты и технологии. 2018. №1 (198). С. 14-20.
10) Махов В.Е. Контроль линейных размеров изделий на базе технологий фирмы «NATIONAL INSTRUMENTS)) / В.Е. Махов // Известия высших учебных заведений. Приборостроение. 2010. Т. 53, №7. С. 54-60.
11) Махов Е.М. Прикладная оптика: Учеб. пособие / Е.М. Махов, А.И. Потапов, В.Е. Махов - СПб.: СЗТУ, 2004. - 348 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНИЗОТРОПНОЙ РЕГИСТРАЦИИ СВЕТОВОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2790049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТНОГО ПРОФИЛЯ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА ОБЪЕМНОЙ ОБЛАСТИ ПРОСТРАНСТВА НА ОСНОВЕ АНАЛИЗА СВЕТОВОГО ПОЛЯ | 2020 |
|
RU2773390C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЧЕТЫРЕХМЕРНЫХ ЯРКОСТНО-СПЕКТРАЛЬНЫХ ПРОФИЛЕЙ УДАЛЕННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2822085C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ВЫСОКОГО ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ ОПТИКО-ЭЛЕКТРОННЫМ СРЕДСТВОМ НАБЛЮДЕНИЯ ЗА УДАЛЕННЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2806249C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЦЕЛЕЙ НА ОСНОВЕ РЕГИСТРАЦИИ И ОБРАБОТКИ ХОДА ЛУЧЕЙ ОТ ОБЪЕКТОВ В НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2760845C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| ТРЕХСПЕКТРАЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2022 |
|
RU2808963C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |

Изобретение относится к оптическим стереоскопическим способам определения относительного местонахождения объектов в окружающем пространстве. Способ включает формирование оптического изображения, определение местонахождения каждого малоразмерного объектами, измерение расстояния между выбранными малоразмерными объектами, изменение угла визирования. Измерение расстояний между малоразмерными объектами и определение местонахождения каждого малоразмерного объекта осуществляют на основе всех полноформатных оптических изображений области наблюдаемого пространства с алгоритмически вычисляемыми разными углами визирования и расстоянием фокусировки оптико-электронной системы, состоящей из оптической части, которая преобразует направление хода лучей от объекта в плоскость электронного устройства регистрирующего энергию лучей, и электронной части, которая регистрирует энергию лучей. Техническим результатом изобретения является повышение точности определения расстояния между малоразмерными объектами и разрешающей способности для объектов при наложении их изображений в плоскости фотоприемника. 7 ил.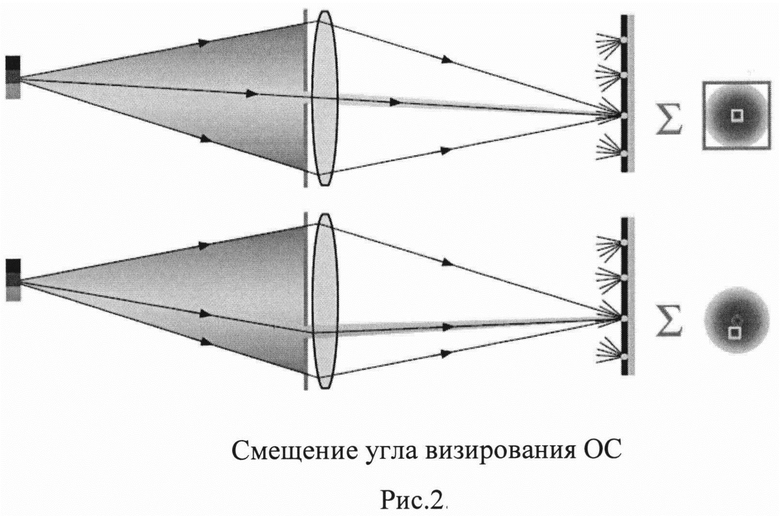
Способ измерения пространственного расстояния между малоразмерными объектами в окружающем пространстве, включающий формирование оптического изображения, определение местонахождения каждого малоразмерного объектами, измерение расстояния между выбранными малоразмерными объектами, изменение угла визирования, отличающийся тем, что измерение расстояний между малоразмерными объектами и определение местонахождения каждого малоразмерного объекта осуществляют на основе всех полноформатных оптических изображений области наблюдаемого пространства с алгоритмически вычисляемыми разными углами визирования и расстоянием фокусировки оптико-электронной системы, состоящей из оптической части, которая преобразует направление хода лучей от объекта в плоскость электронного устройства регистрирующего энергию лучей (матричного фотоприемника), и электронной части, которая регистрирует энергию лучей (матричный фотоприемник), при этом формирование оптических изображений осуществляют алгоритмически на основе упорядоченной группы субапертурных малоразмерных изображений, получаемой дополнительной матричной оптической системой, дополняющей основную проектирующую оптическую систему, формирующую изображение малоразмерных объектов наблюдаемого пространства и состоящую из массива микролинз, расположенного после объектива перед матричным фотоприемником, путем регистрации совокупности хода лучей по направлениям их распространения в оптико-электронную систему, позволяющих фиксировать объемные параметры пространственно-разнесенных малоразмерных объектов и объединять субапертурные малоразмерные изображения с разными углами визирования для увеличения числа значимых пикселей в каждой области изображения наблюдаемых малоразмерных объектов, при этом изменение угла визирования осуществляют алгоритмически на базе правила суммирования сигналов с фотодиодов фотоприемника, соответствующих направлению хода лучей.
| US 8767186 B2, 01.07.2014 | |||
| KR 20180037241 A, 11.04.2018 | |||
| US 6512518 B2, 28.01.2003. |

